
Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction


Abstract
:1. Introduction
2. Materials and Methods
2.1. Input Data
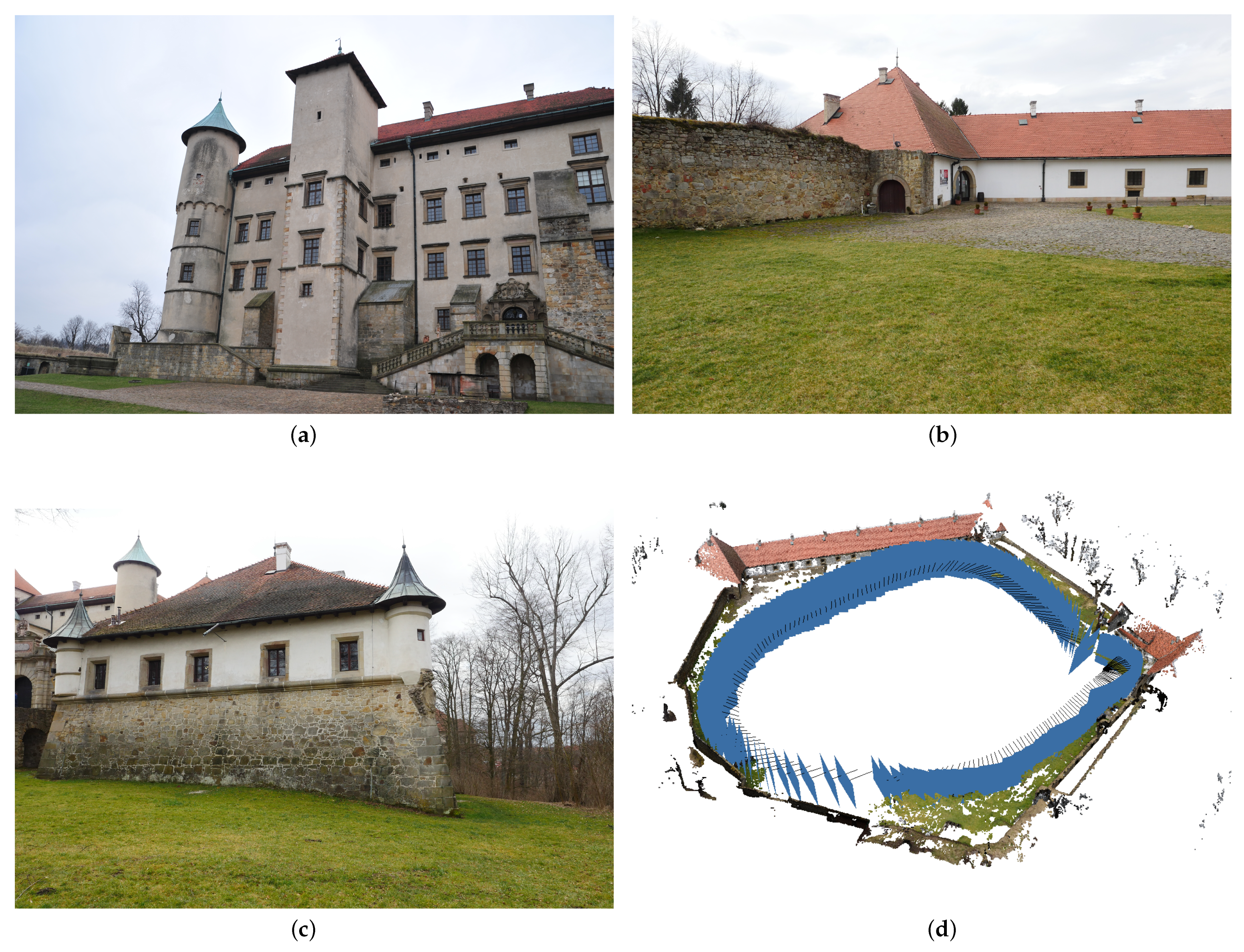
2.1.1. Terrestrial Photography
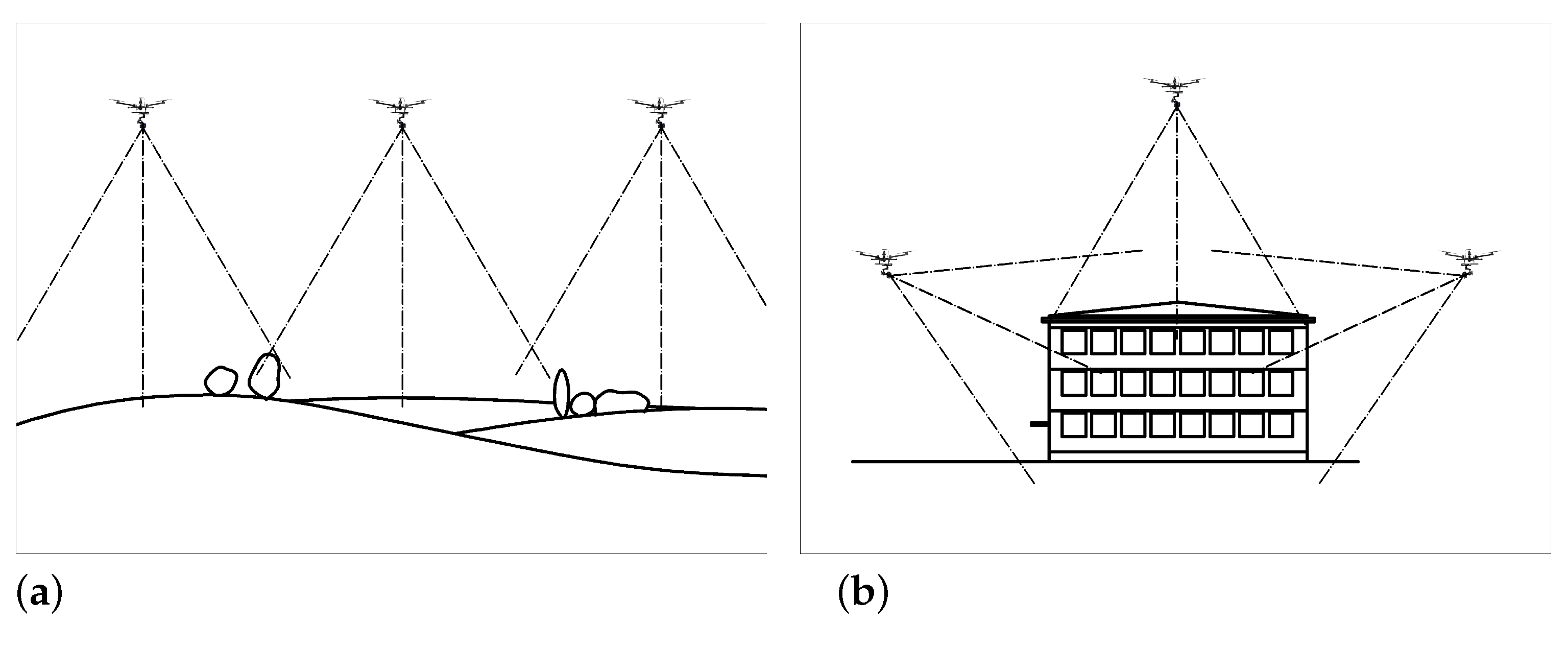
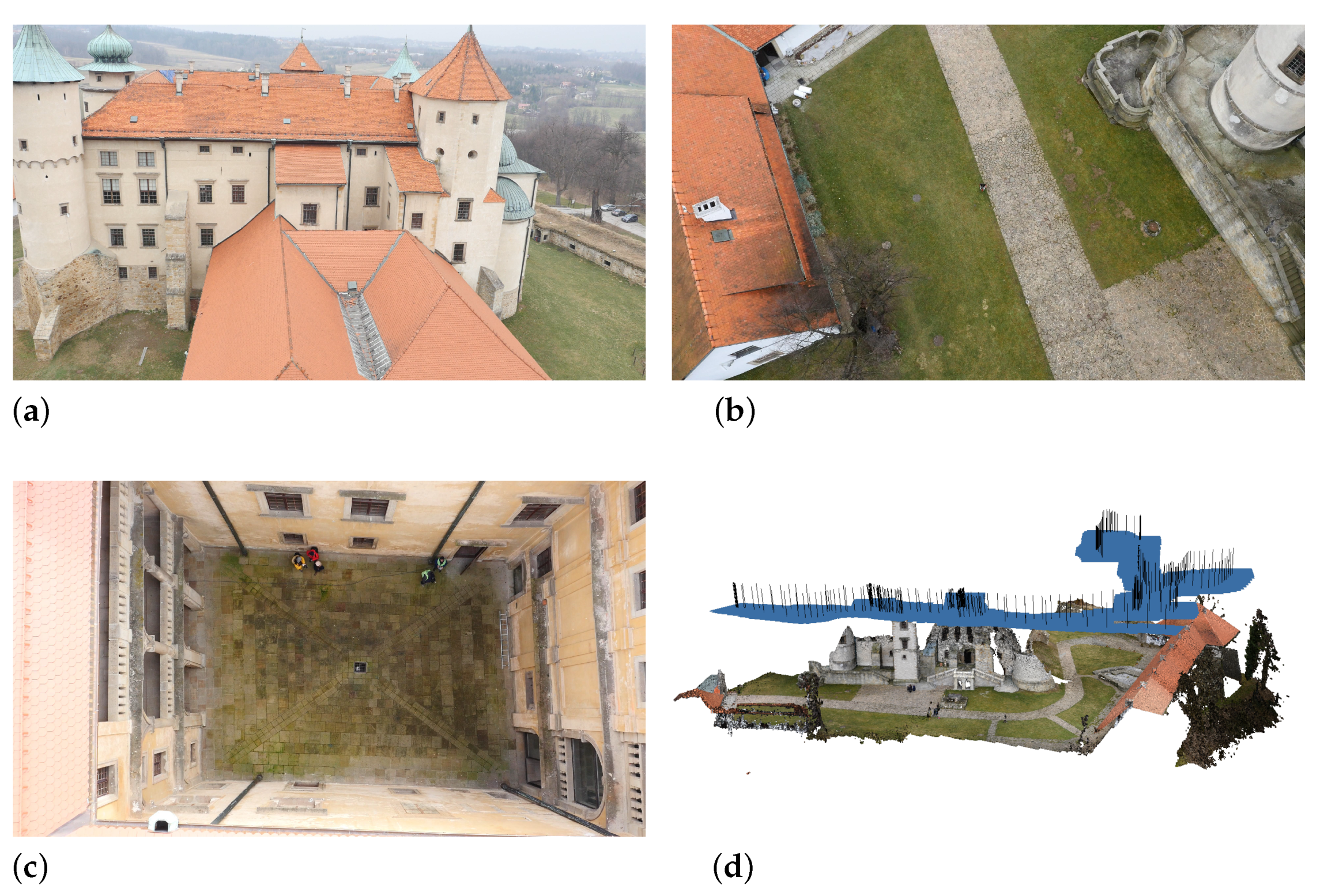
2.1.2. Aerial Photography
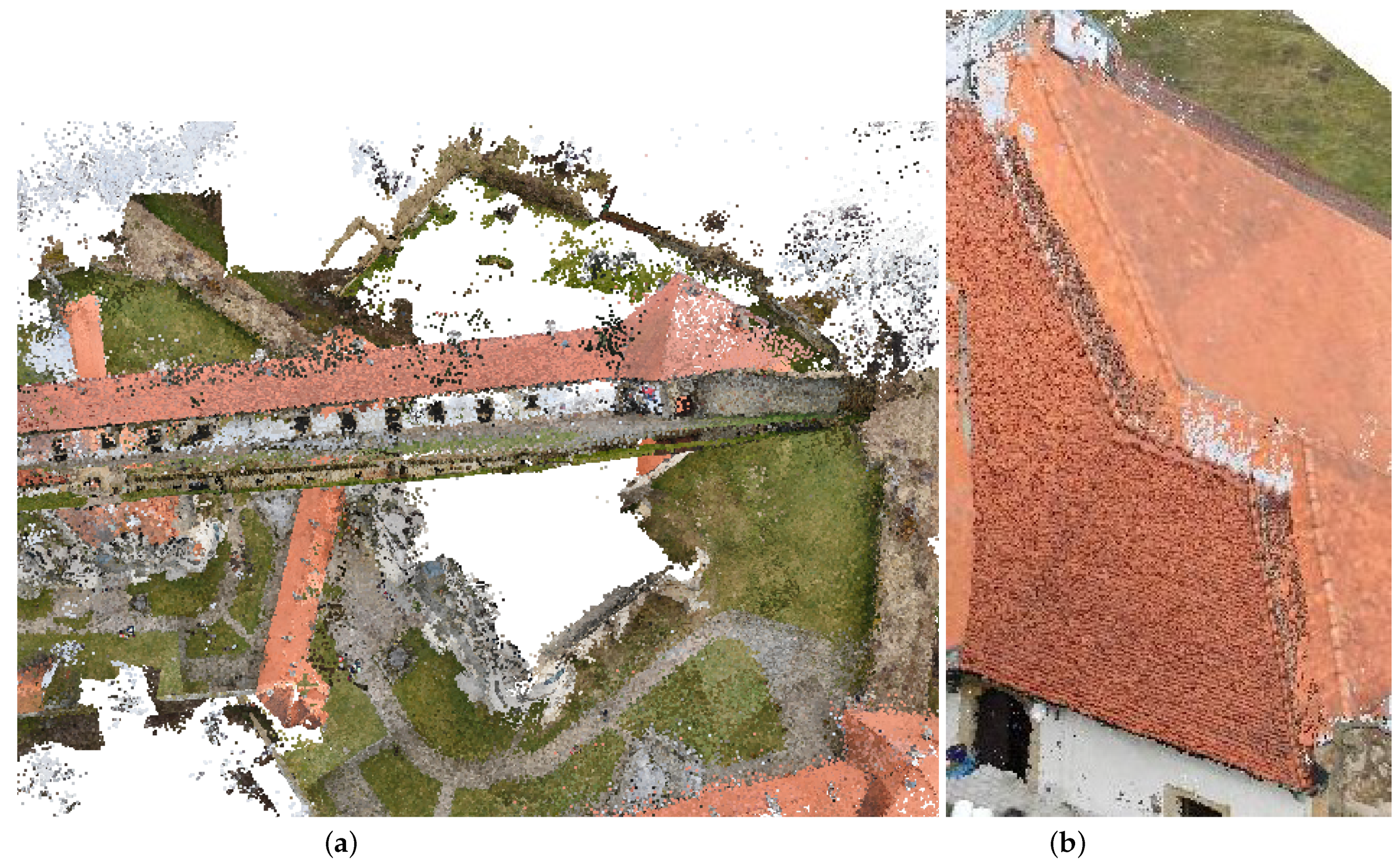
2.1.3. Additional Images
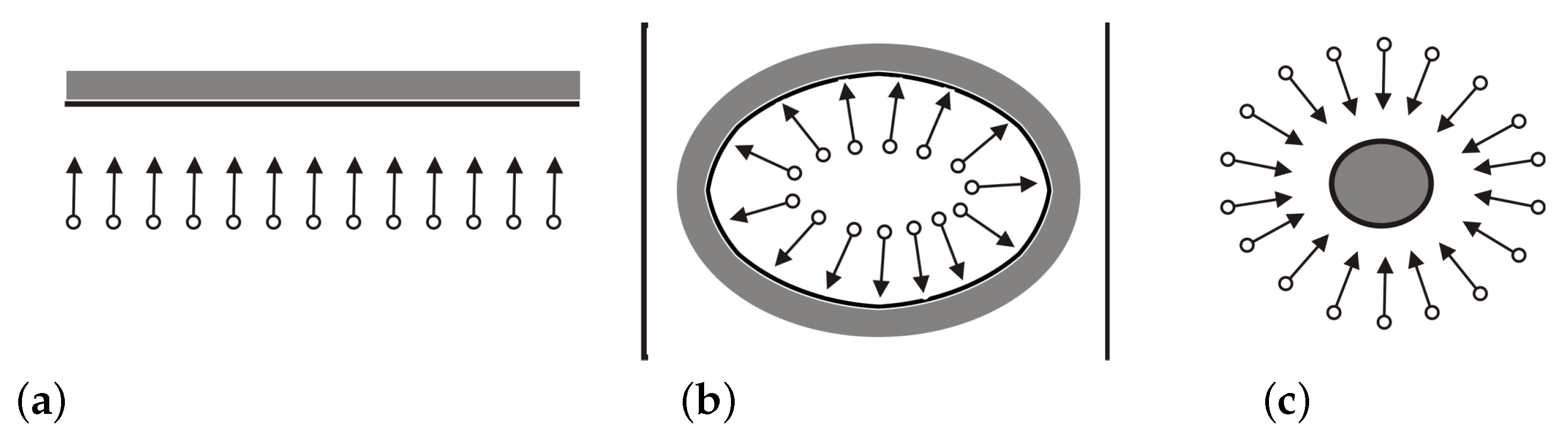
2.2. Photogrammetric Reconstruction
- Alignment of the photographs;
- Creating a sparse point cloud based on the aligned photos;
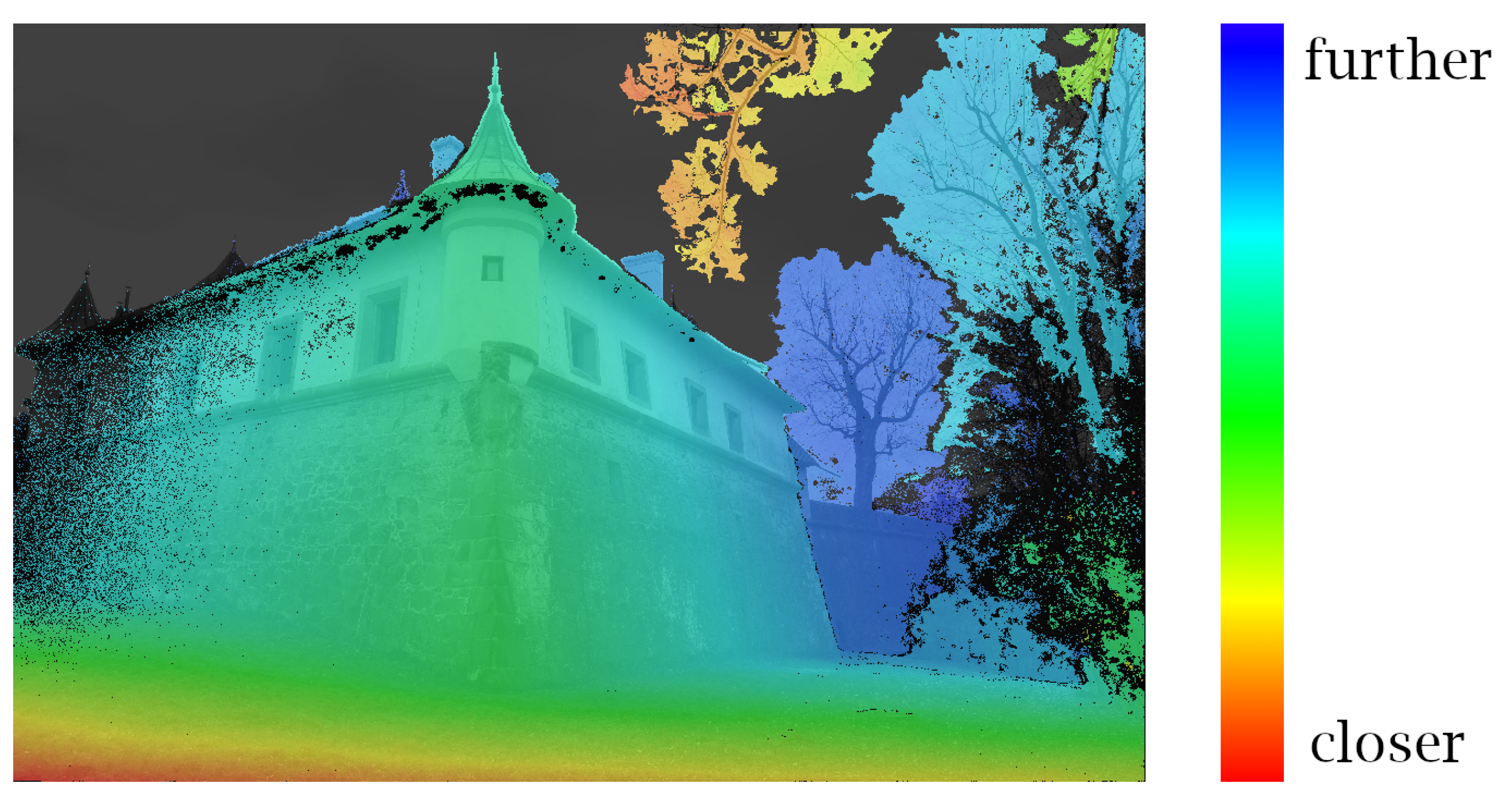
- Creating a depth map for each of the aligned photos;
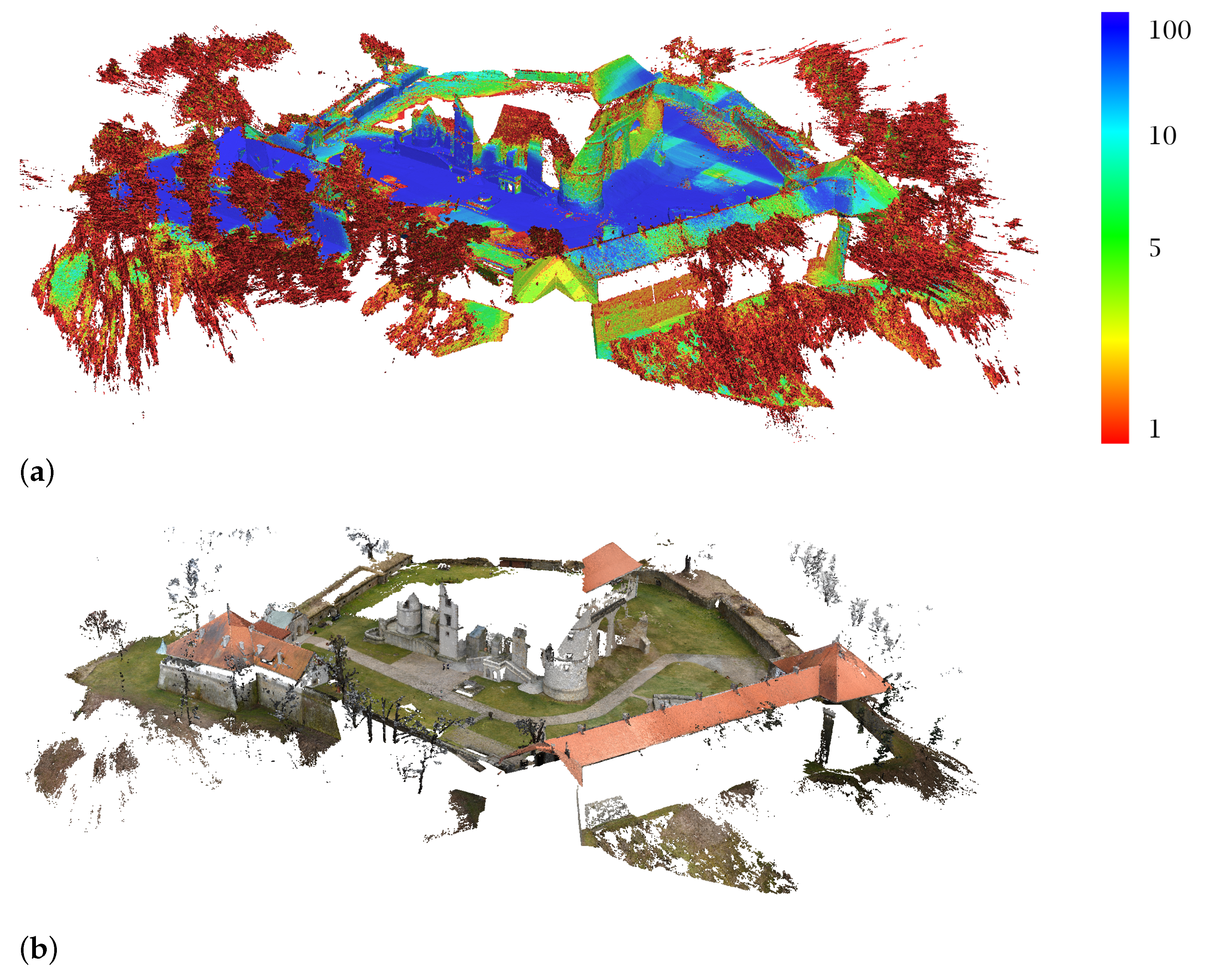
- Creating a dense point cloud.
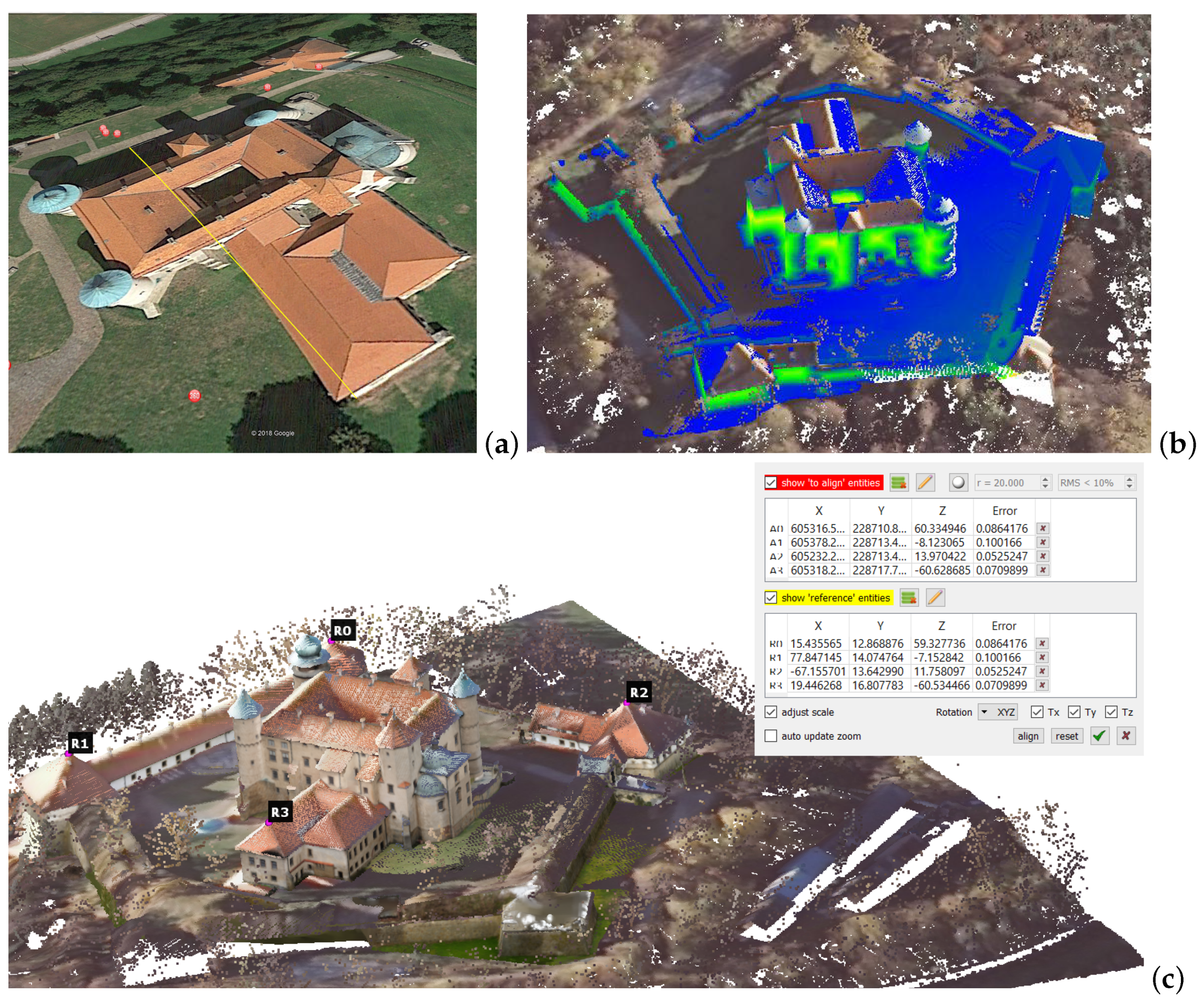
2.3. Comparative Data
3. Results
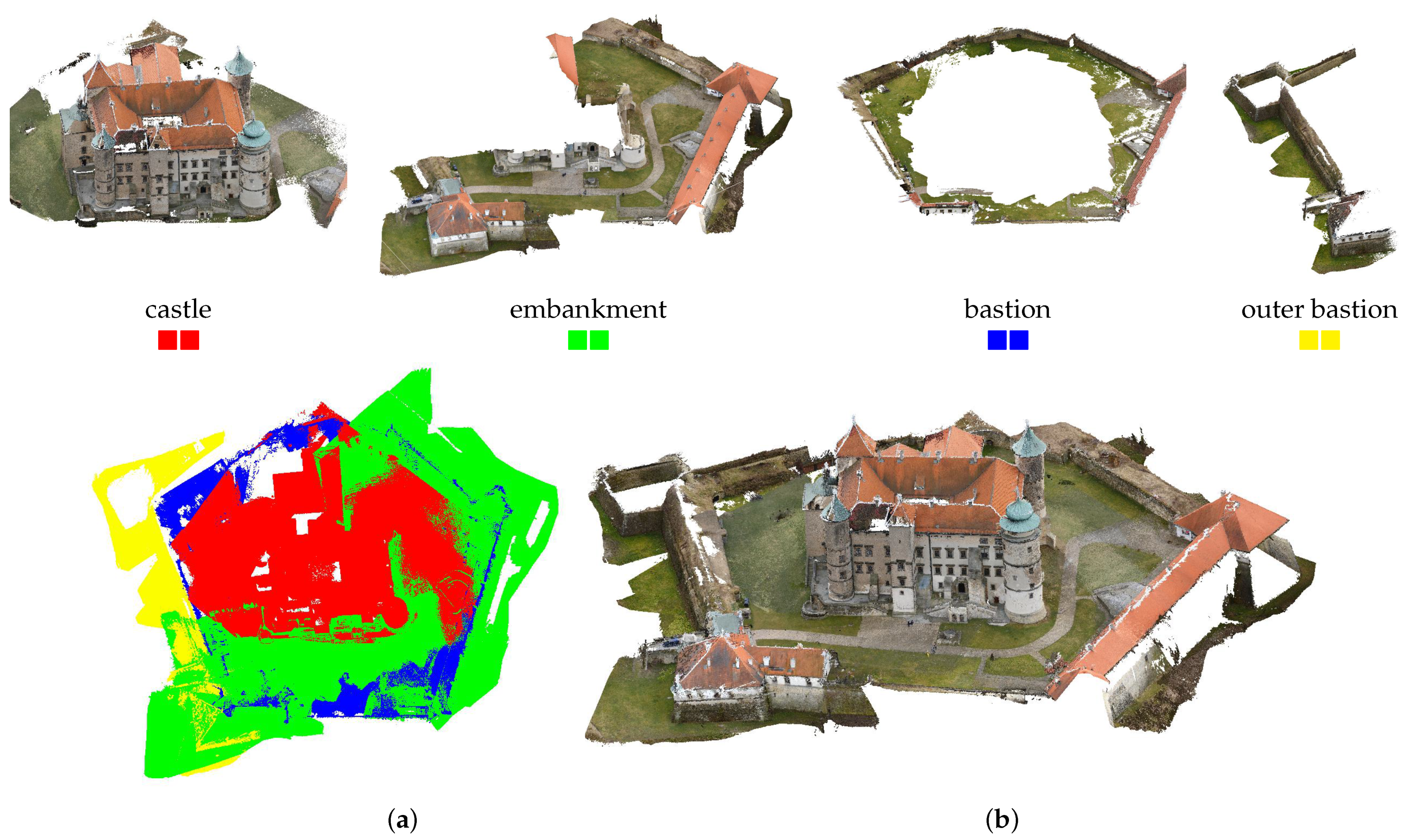
3.1. Integration of Reconstructions
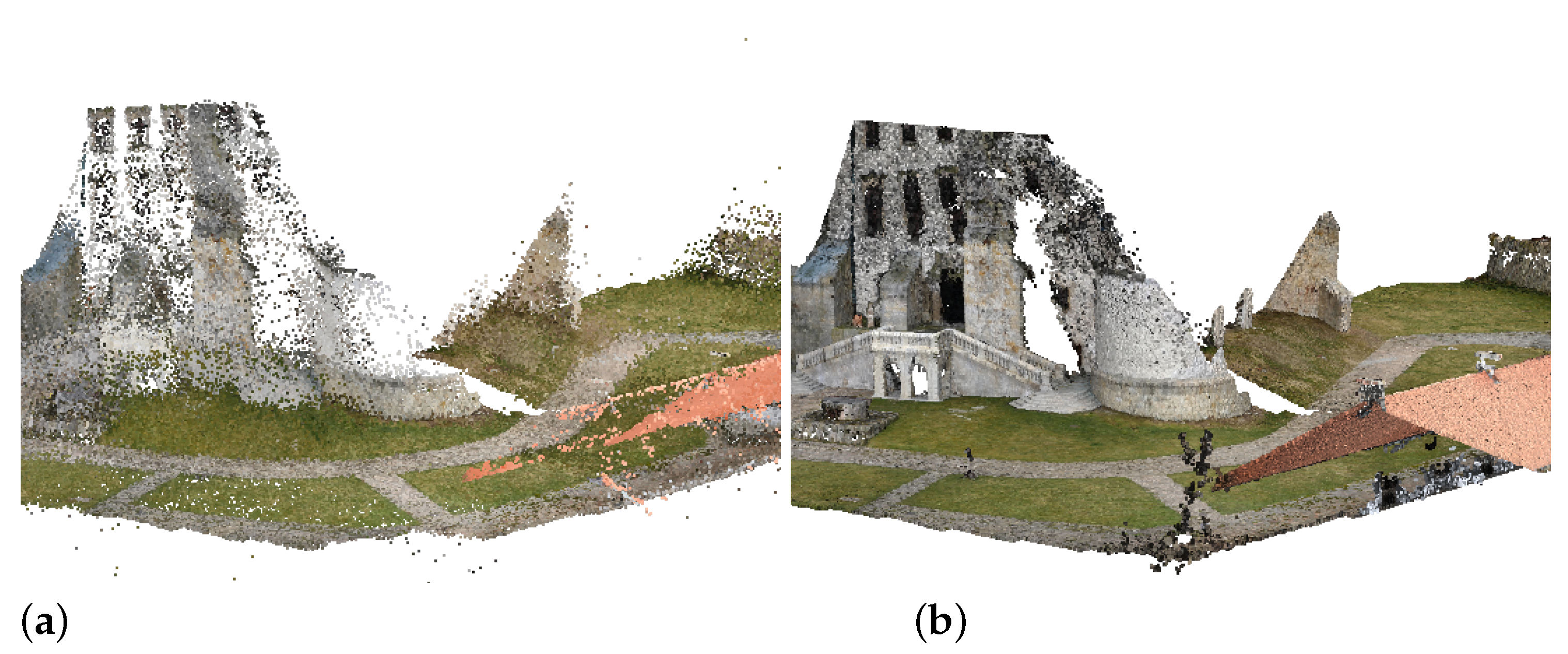
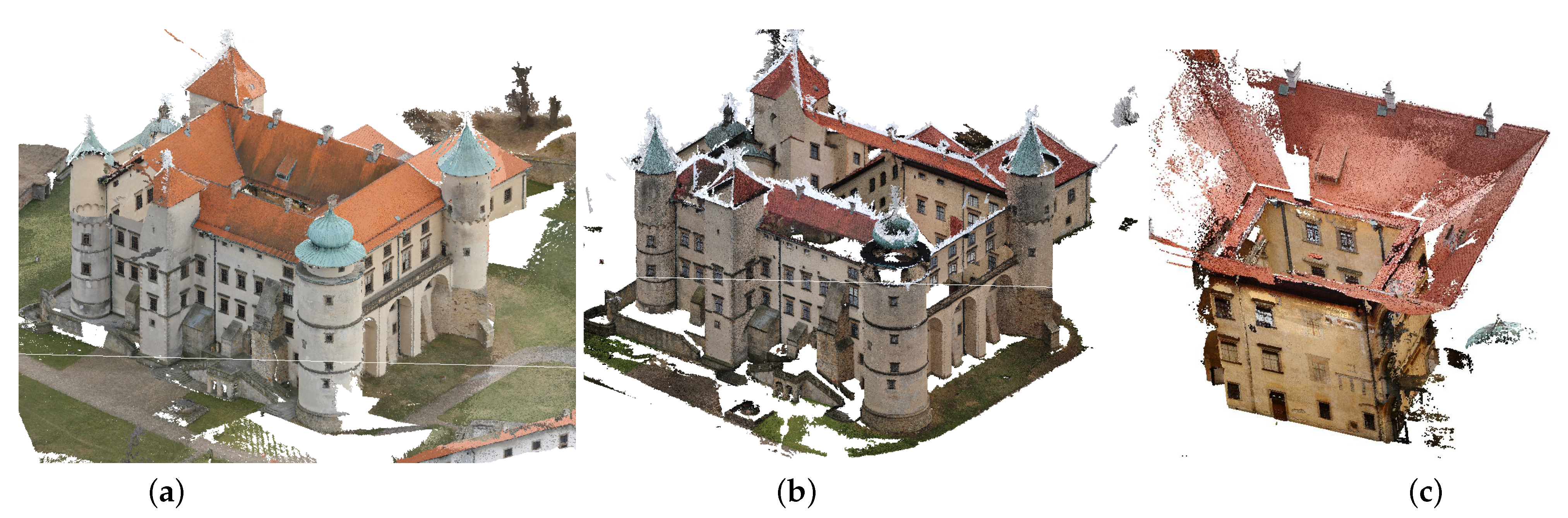
3.1.1. The Castle and Inner Courtyard
3.1.2. Bastions and Embankment
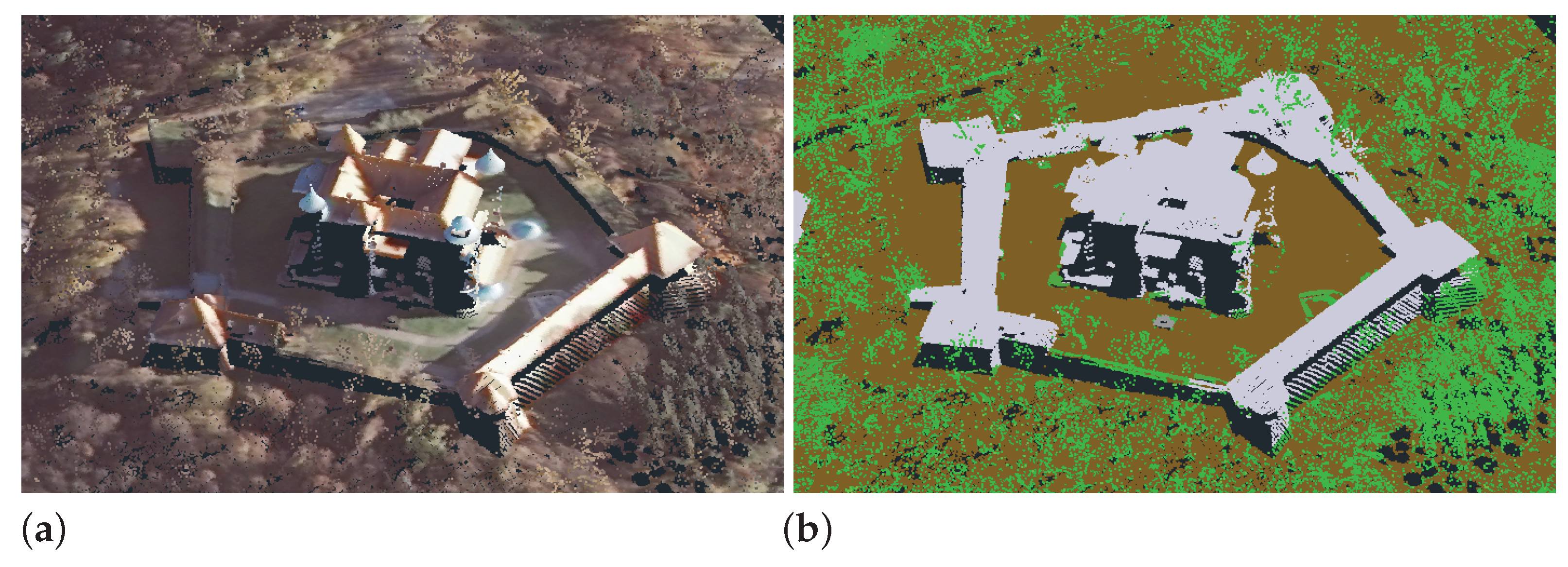
3.2. Surface Model Creation
3.3. Scaling Up the Model
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SFM | Structure from motion |
| MVS | Multi-view stereo |
| UAV | Unmanned aerial vehicle |
| SIFT | Scale-invariant feature transform |
| DSM | Digital surface model |
| BIM | Building information model |
| DSLM | Digital single lens mirrorless |
| DSLR | Digital single lens reflex |
| LiDAR | Light detection and ranging |
| ISOK | IT system of the country protection |
| Exif | Exchangeable image file format |
| TLS | Terrestrial laser scanning |
| RMS | Root-mean-square |
| ICP | Iterative closest point |
References
- Gosztyła, M.; Pásztor, P. Konserwacja i ochrona Zabytków Architektury, 1st ed.; Oficyna Wydawnicza Politechniki Rzeszowskiej: Rzeszów, Poland, 2014; pp. 93–100. [Google Scholar]
- Reinoso-Gordo, J.F.; Gámiz-Gordo, A.; Barrero-Ortega, P. Digital Graphic Documentation and Architectural Heritage: Deformations in a 16th-Century Ceiling of the Pinelo Palace in Seville (Spain). ISPRS Int. J. Geo-Inf. 2021, 10, 85. [Google Scholar] [CrossRef]
- Dettloff, P. Odbudowa i Restauracja Zabytków Architektury w Polsce w Latach 1918–1939 Teoria i Praktyka, 1st ed.; Universitas: Kraków, Poland, 2008. [Google Scholar]
- Prawo geodezyjne i kartograficzne z dnia 17 maja 1989 r., Dz. U. 1989 Nr 30 poz. 163, art. 40a ust. 2 pkt.1. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU19890300163 (accessed on 25 March 2021).
- Geoportal Krajowy. Available online: https://mapy.geoportal.gov.pl/imap/Imgp_2.html (accessed on 25 March 2021).
- LAS Specification 1.4-R14. The American Society for Photogrammetry & Remote Sensing. Available online: http://www.asprs.org/wp-content/uploads/2019/03/LAS_1_4_r14.pdf (accessed on 26 March 2021).
- Informatyczny System Osłony Kraju. Available online: https://isok.gov.pl/index.html (accessed on 26 March 2021).
- Chen, J.; Yi, J.S.K.; Kahoush, M.; Cho, E.S.; Cho, Y.K. Point Cloud Scene Completion of Obstructed Building Facades with Generative Adversarial Inpainting. Sensors 2020, 20, 5029. [Google Scholar] [CrossRef] [PubMed]
- Ramos, M.M.; Remondino, F. Data Fusion in Cultural Heritage—A Review. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W7, 359–363. [Google Scholar] [CrossRef] [Green Version]
- Klein, N.; Li, N.; Becerik-Gerber, B. Imaged-based verification of as-built documentation of operational buildings. Autom. Constr. 2012, 21, 161–171. [Google Scholar] [CrossRef]
- Jebara, T.; Azarbayenjani, A.; Pentl, A. 3D structure from 2D motion. IEEE Signal Process. Mag. 1999, 16, 66–84. [Google Scholar] [CrossRef]
- Skabek, K.; Łabędź, P.; Ozimek, P. Improvement and unification of input images for photogrammetric reconstruction. Comput. Assist. Methods Eng. Sci. 2020, 26, 153–162. [Google Scholar]
- Kazhdan, M.; Matthew, B.; Hoppe, H. Poisson surface reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, Cagliari, Sardinia, 26–28 June 2006. [Google Scholar]
- Risse, B.; Mangan, M.; Sturzl, W.; Webb, B. Software to convert terrestrial LiDAR scans of natural environments into photorealistic meshes. Environ. Model. Softw. 2018, 99, 88–100. [Google Scholar] [CrossRef] [Green Version]
- Farella, E.M.; Torresani, A.; Remondino, F. Refining the Joint 3D Processing of Terrestrial and UAV Images Using Quality Measures. Remote Sens. 2020, 12, 2873. [Google Scholar] [CrossRef]
- Di Angelo, L.; Di Stefano, P.; Guardiani, E.; Morabito, A.E. A 3D Informational Database for Automatic Archiving of Archaeological Pottery Finds. Sensors 2021, 21, 978. [Google Scholar] [CrossRef] [PubMed]
- Apollonio, F.I.; Fantini, F.; Garagnani, S.; Gaiani, M. A Photogrammetry-Based Workflow for the Accurate 3D Construction and Visualization of Museums Assets. Remote Sens. 2021, 13, 486. [Google Scholar] [CrossRef]
- Donato, E.; Giuffrida, D. Combined Methodologies for the Survey and Documentation of Historical Buildings: The Castle of Scalea (CS, Italy). Heritage 2019, 2, 2384–2397. [Google Scholar] [CrossRef] [Green Version]
- Brůha, L.; Laštovička, J.; Palatý, T.; Štefanová, E.; Štych, P. Reconstruction of Lost Cultural Heritage Sites and Landscapes: Context of Ancient Objects in Time and Space. ISPRS Int. J. Geo-Inf. 2020, 9, 604. [Google Scholar] [CrossRef]
- Goedert, J.; Bonsell, J.; Samura, F. Integrating Laser Scanning and Rapid Prototyping to enhance Construction Modeling. J. Archit. Eng. 2005, 11, 71–74. [Google Scholar] [CrossRef]
- Xiao, Z.; Liang, J.; Yu, D.; Asundi, A. Large field-of-view deformation measurement for transmission tower based on close-range photogrammetry. Measurement 2011, 44, 1705–1712. [Google Scholar] [CrossRef]
- Maas, H.G.; Hampel, U. Photogrammetric Techniques in Civil Engineering Material Testing and Structure Monitoring. Photogramm. Eng. Remote Sens. 2006, 72, 39–45. [Google Scholar] [CrossRef]
- Osello, A.; Lucibello, G.; Morgagni, F. HBIM and Virtual Tools: A New Chance to Preserve Architectural Heritage. Buildings 2018, 8, 12. [Google Scholar] [CrossRef] [Green Version]
- Attenni, M. Informative Models for Architectural Heritage. Heritage 2019, 2, 2067–2089. [Google Scholar] [CrossRef] [Green Version]
- Carnevali, L.; Lanfranchi, F.; Russo, M. Built Information Modeling for the 3D Reconstruction of Modern Railway Stations. Heritage 2019, 2, 2298–2310. [Google Scholar] [CrossRef] [Green Version]
- Croce, V.; Caroti, G.; De Luca, L.; Jacquot, K.; Piemonte, A.; Véron, P. From the Semantic Point Cloud to Heritage-Building Information Modeling: A Semiautomatic Approach Exploiting Machine Learning. Remote Sens. 2021, 13, 461. [Google Scholar] [CrossRef]
- Chan, T.O.; Xia, L.; Chen, Y.; Lang, W.; Chen, T.; Sun, Y.; Wang, J.; Li, Q.; Du, R. Symmetry Analysis of Oriental Polygonal Pagodas Using 3D Point Clouds for Cultural Heritage. Sensors 2021, 21, 1228. [Google Scholar] [CrossRef]
- Mahami, H.; Nasirzadeh, F.; Hosseininaveh Ahmadabadian, A.; Nahavandi, S. Automated Progress Controlling and Monitoring Using Daily Site Images and Building Information Modelling. Buildings 2019, 9, 70. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.-P. Extending 3D-GIS District Models and BIM-Based Building Models into Computer Gaming Environment for Better Workflow of Cultural Heritage Conservation. Appl. Sci. 2021, 11, 2101. [Google Scholar] [CrossRef]
- Kłopotowska, A.; Kłopotowski, M. Dotykowe Modele Architektoniczne w Przestrzeniach Polskich Miast, 1st ed.; Oficyna Wydawnicza Politechniki Białostockiej: Białystok, Poland, 2018; Volume 1, pp. 27–82. [Google Scholar]
- Partovi, T.; Fraundorfer, F.; Bahmanyar, R.; Huang, H.; Reinartz, P. Automatic 3-D Building Model Reconstruction from Very High Resolution Stereo Satellite Imagery. Remote Sens. 2019, 11, 1660. [Google Scholar] [CrossRef] [Green Version]
- Bacharidis, K.; Sarri, F.; Paravolidakis, V.; Ragia, L.; Zervakis, M. Fusing Georeferenced and Stereoscopic Image Data for 3D Building Façade Reconstruction. ISPRS Int. J. Geo-Inf. 2018, 7, 151. [Google Scholar] [CrossRef] [Green Version]
- Hu, P.; Yang, B.; Dong, Z.; Yuan, P.; Huang, R.; Fan, H.; Sun, X. Towards Reconstructing 3D Buildings from ALS Data Based on Gestalt Laws. Remote Sens. 2018, 10, 1127. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Weng, Q.; Zheng, Y. A Hybrid Approach for Three-Dimensional Building Reconstruction in Indianapolis from LiDAR Data. Remote Sens. 2017, 9, 310. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Jwa, Y.; Sohn, G. Implicit Regularization for Reconstructing 3D Building Rooftop Models Using Airborne LiDAR Data. Sensors 2017, 17, 621. [Google Scholar] [CrossRef]
- Yang, B.; Huang, R.; Li, J.; Tian, M.; Dai, W.; Zhong, R. Automated Reconstruction of Building LoDs from Airborne LiDAR Point Clouds Using an Improved Morphological Scale Space. Remote Sens. 2017, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Cali, M.; Ambu, R. Advanced 3D Photogrammetric Surface Reconstruction of Extensive Objects by UAV Camera Image Acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, G.; Gonçalves, D.; Gómez-Gutiérrez, Á.; Andriolo, U.; Pérez-Alvárez, J.A. 3D Reconstruction of Coastal Cliffs from Fixed-Wing and Multi-Rotor UAS: Impact of SfM-MVS Processing Parameters, Image Redundancy and Acquisition Geometry. Remote Sens. 2021, 13, 1222. [Google Scholar] [CrossRef]
- Sestras, P.; Roșca, S.; Bilașco, Ș.; Naș, S.; Buru, S.M.; Kovacs, L.; Spalević, V.; Sestras, A.F. Feasibility Assessments Using Unmanned Aerial Vehicle Technology in Heritage Buildings: Rehabilitation-Restoration, Spatial Analysis and Tourism Potential Analysis. Sensors 2020, 20, 2054. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomatics 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Li, Y.; Wu, B. Relation-Constrained 3D Reconstruction of Buildings in Metropolitan Areas from Photogrammetric Point Clouds. Remote Sens. 2021, 13, 129. [Google Scholar] [CrossRef]
- Alidoost, F.; Arefi, H.; Tombari, F. 2D Image-To-3D Model: Knowledge-Based 3D Building Reconstruction (3DBR) Using Single Aerial Images and Convolutional Neural Networks (CNNs). Remote Sens. 2019, 11, 2219. [Google Scholar] [CrossRef] [Green Version]
- Moyano, J.; Nieto-Julián, J.E.; Bienvenido-Huertas, D.; Marín-García, D. Validation of Close-Range Photogrammetry for Architectural and Archaeological Heritage: Analysis of Point Density and 3D Mesh Geometry. Remote Sens. 2020, 12, 3571. [Google Scholar] [CrossRef]
- Książek, M. Miasta prywatne Wiśnicz Nowy i Kolbuszowa, 1st ed.; Wydawnictwo PK: Kraków, Poland, 1990; pp. 29–99. [Google Scholar]
- Marcinek, R. Nowy Wiśnicz: Niezwykły świat Polskiego Baroku, 1st ed.; Muzeum Ziemi Wiśnickiej: Nowy Wiśnicz, Poland, 2018. [Google Scholar]
- Szlezynger, P. Nowy Wiśnicz: Historia, Architektura, Konserwacja, 1st ed.; Akademia Wychowania Fizycznego im. Bronisława Czecha: Kraków, Poland, 2013. [Google Scholar]
- Majewski, A. The Castle in Wiśnicz: The History of the Castle and Its Reconstruction, 1st ed.; Muzeum Historyczne m. Tarnobrzega: Tarnobrzeg, Poland, 1998. [Google Scholar]
- Rozporządzenie Prezydenta Rzeczypospolitej Polskiej z dnia 20 Kwietnia 2020 r. w Sprawie Uznania za Pomnik Historii “Nowy Wiśnicz—Zespół Architektoniczno-Krajobrazowy”. Available online: https://www.prawo.pl/akty/dz-u-2020-841,18988724.html (accessed on 25 March 2021).
- Bogdanowski, J. Architektura Obronna w Krajobrazie Polski, 1st ed.; Wydawnictwo Naukowe PWN: Kraków, Poland, 1996; pp. 123–159. [Google Scholar]
- Forczek-Brataniec, U. The cultural landscape of Nowy Wiśnicz—A study of visual exposure as a basis for the development and management of the surroundings of the castle hill. Tech. Trans. 2019, 11, 23–40. [Google Scholar] [CrossRef] [Green Version]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close Range Photogrammetry and 3D Imaging, 2nd ed.; Walter de Gruyter: London, UK, 2013. [Google Scholar]
- Skabek, K.; Tomaka, A. Comparison of photogrammetric techniques for surface reconstruction from images to reconstruction from laser scanning. Theor. Appl. Informat. 2014, 26, 161–178. [Google Scholar]
- Agisoft LLC. Agisoft Metashape (Version 1.6.3); Agisoft LLC: Saint Petersburg, Russia, 2020. [Google Scholar]
- Lowe, D. Object recognition from local scale-invariant features. In Proceedings of the International Conference on Computer Vision, Corfu, Greece, 20–25 September 1999; Volume 2, pp. 1150–1157. [Google Scholar]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Directive 2007/2/EC of the European Parliament and of the Council of 14 March 2007 establishing an Infrastructure for Spatial Information in the European Community (INSPIRE). Available online: https://eur-lex.europa.eu/legal-content/EN/ALL/?uri=CELEX%3A32007L0002 (accessed on 25 March 2021).
- Besl, P.J.; McKay, N.D. A method for registration of 3-d shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Eggert, D.; Dalyot, S. Octree-Based SIMD Strategy for ICP Registration and Alignment of 3d Point Clouds. ISPRS Annals of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2012, I-3, 105–110. [Google Scholar]
- Wu, C. VisualSFM: A Visual Structure from Motion System. Available online: http://ccwu.me/vsfm/ (accessed on 25 March 2021).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition | Number | Tie | Dense | Filtered | ||
|---|---|---|---|---|---|---|
| Stage | Area | Method | of Photos | Points | Cloud | Cloud |
| 1 | castle 1 | terrestrial | 366 | 1,045,020 | 44,776,439 | 27,337,467 |
| 1 | castle 2 | UAV | 302 | 890,756 | 52,896,358 | 33,150,202 |
| 1 | courtyard | UAV | 474 | 1,048,415 | 157,778,993 | 51,763,053 |
| castle | integrated | 68,817,325 | 25,527,922 | |||
| 2 | bastion | terrestrial | 194 | 506,087 | 22,114,735 | 13,990,196 |
| 2 | embankment | UAV | 649 | 1,830,955 | 85,862,288 | 50,966,297 |
| 2 | outer bastion | terrestrial | 315 | 1,545,457 | 83,823,067 | 13,425,129 |
| castle&bastion | integrated | 80,033,675 | 48,969,119 |
| Model to LAS ISOK | LAS ISOK to Model | |
|---|---|---|
| Quartile 1 | 0.2168 | 0.0822 |
| Median | 0.3065 | 0.1641 |
| Quartile 3 | 1.1351 | 0.2461 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozimek, A.; Ozimek, P.; Skabek, K.; Łabędź, P. Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction. Buildings 2021, 11, 206. https://doi.org/10.3390/buildings11050206
Ozimek A, Ozimek P, Skabek K, Łabędź P. Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction. Buildings. 2021; 11(5):206. https://doi.org/10.3390/buildings11050206
Chicago/Turabian StyleOzimek, Agnieszka, Paweł Ozimek, Krzysztof Skabek, and Piotr Łabędź. 2021. "Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction" Buildings 11, no. 5: 206. https://doi.org/10.3390/buildings11050206
APA StyleOzimek, A., Ozimek, P., Skabek, K., & Łabędź, P. (2021). Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction. Buildings, 11(5), 206. https://doi.org/10.3390/buildings11050206