
Detection of District Heating Pipe Network Leakage Fault Using UCB Arm Selection Method

Abstract
:1. Introduction
- A reinforcement learning-based approach needs a large number of samples associated with all possible leakage fault situations. Unfortunately, in existing district heating networks, the observational data of leakage faults are relatively rare and cannot cover all leakage cases. Therefore, the hydraulic simulation model established by Xue [11] is used to obtain a leakage dataset [18]. In order to ensure the accuracy of the results, an impedance identification method was also used;
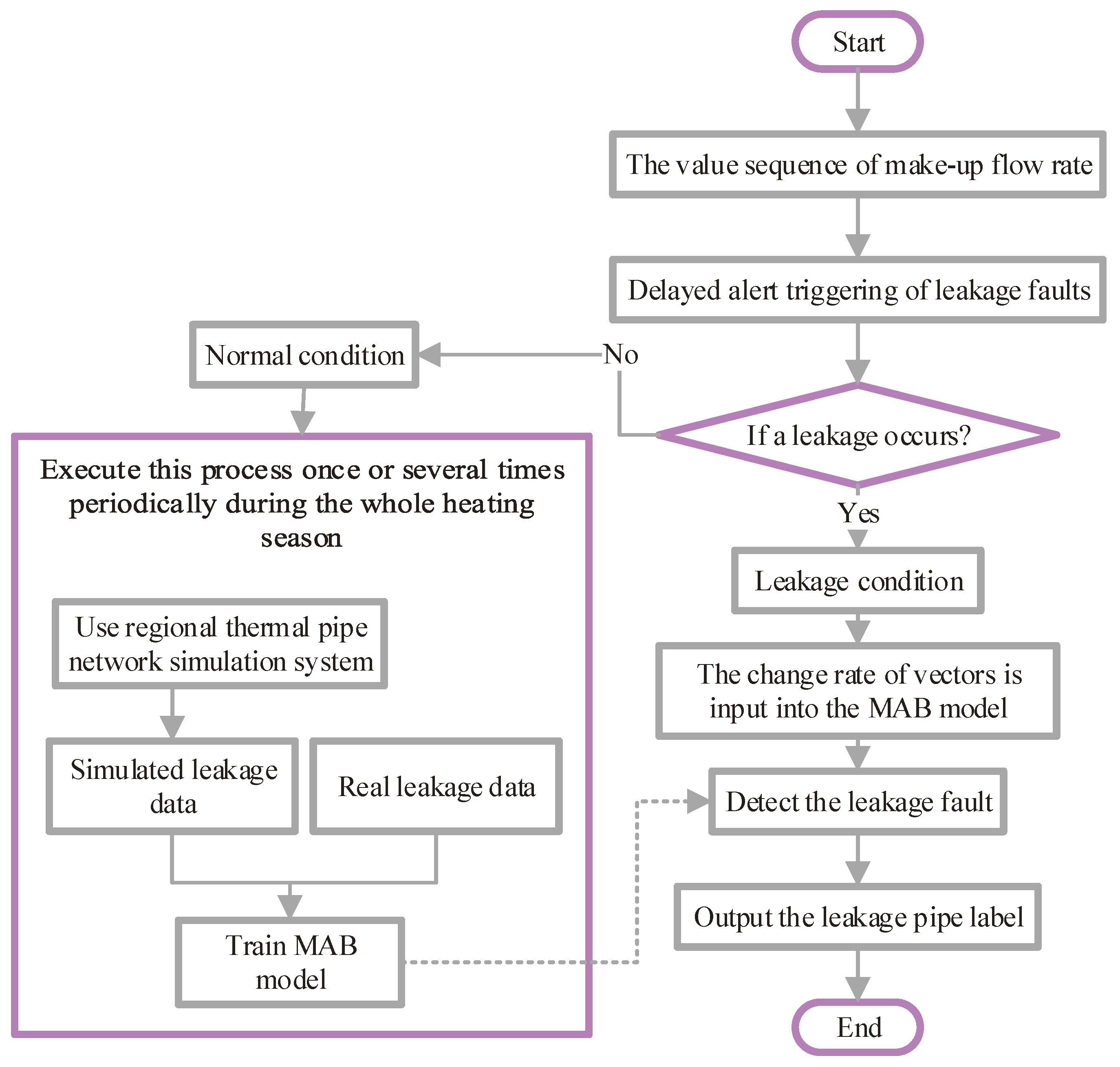
- When a malfunction occurs, the overall DHN make-up water will often change greatly, which will trigger the alarm. In order to enhance system robustness, a delayed alarm triggering algorithm is applied to check the make-up flow rate regularly to indicate whether a leakage has occurred;
- The core of the leakage fault detection model is Contextual Bandit (CB). It mainly includes model parameter synchronization, model prediction, an exploitation–exploration mechanism, real-time feature recording and storage, etc. The model uses the observed data as states to indicate agent arm selection which is a leaking pipe label.
2. Theoretical Background
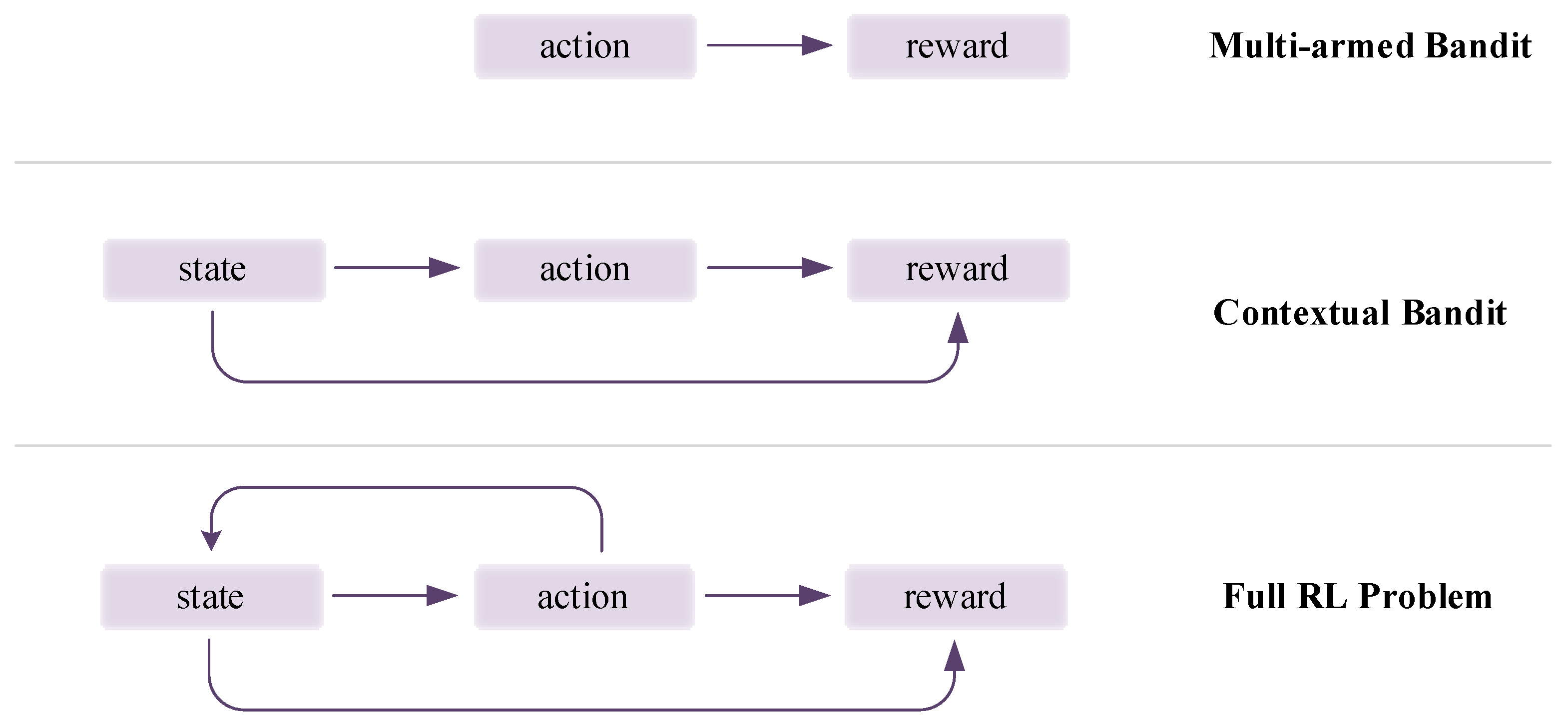
2.1. Contextual Bandit
2.2. Upper Confidence Bound (UCB)
3. LFD Method Based on Reinforcement Learning
3.1. Delayed Alarm Triggering Algorithm
3.2. CB-Based Leakage Fault Detection
3.2.1. Fault Detection Process
3.2.2. LinUCB for Disjoint Linear Model
3.2.3. Algorithm Design
| Algorithm 1. Leakage fault detection algorithm based on Contextual Bandit |
| flow and pressure sensor data. |
| , total mass flow of replenished water |
| , flow threshold, set to 10% of |
| , maximum number of observations in one inspection |
| Output: a, selected action (select a leaky pipe) |
| (a) loop |
| (b) initialize , , s = false, M = 0.5 N0 |
| (c) for t = 1,2,…, N0 do: |
| (d) if s = false then: |
| (e) if : |
| (f) if : s = true |
| (g) break |
| (h) else: |
| (i) else for t = 1,2,3,…: |
| (j) get the current contextual association vector for all arms |
| (k) for all a: |
| (l) if a is new: |
| (m) set Aa to d-dimensional unit matrix |
| (n) set ba to d-dimensional zero vector |
| (o) calculate |
| (p) calculate arm selection probability |
| (q) update |
| (r) update |
4. Experimental Analysis
4.1. Model Parameters
4.2. Evaluation Criteria
- Strip every line of new line character;
- Iterate over each line of input, which act as individual time steps, and split the line based on a single space. This gives us a list of 48 elements;
- Pop the head of the list and assign it as the arm for the current step;
- Take the remaining 47 elements and assign them to the context array for the current step.
4.3. Analysis of Experimental Results
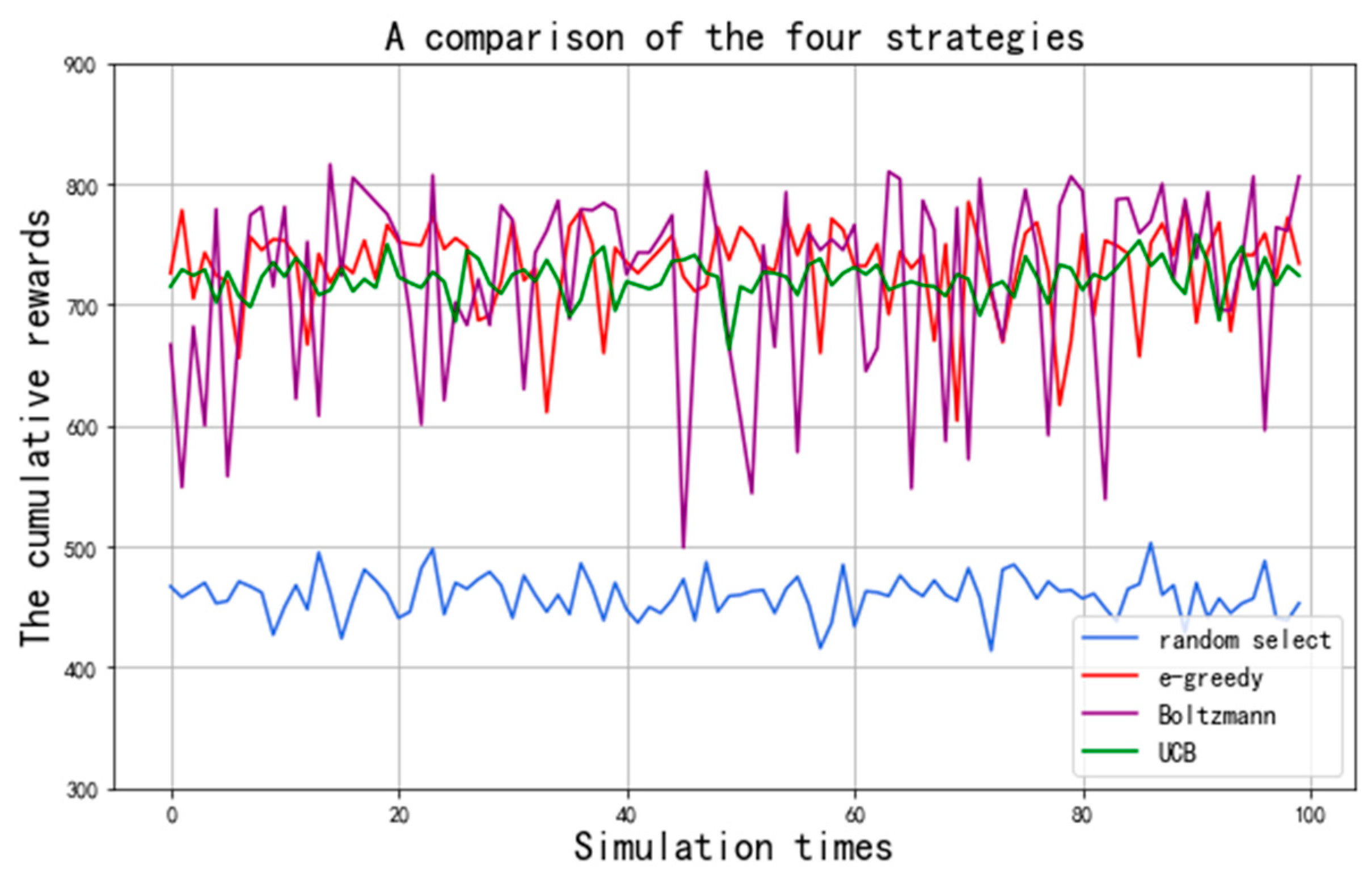
4.3.1. Comparison with Other Methods
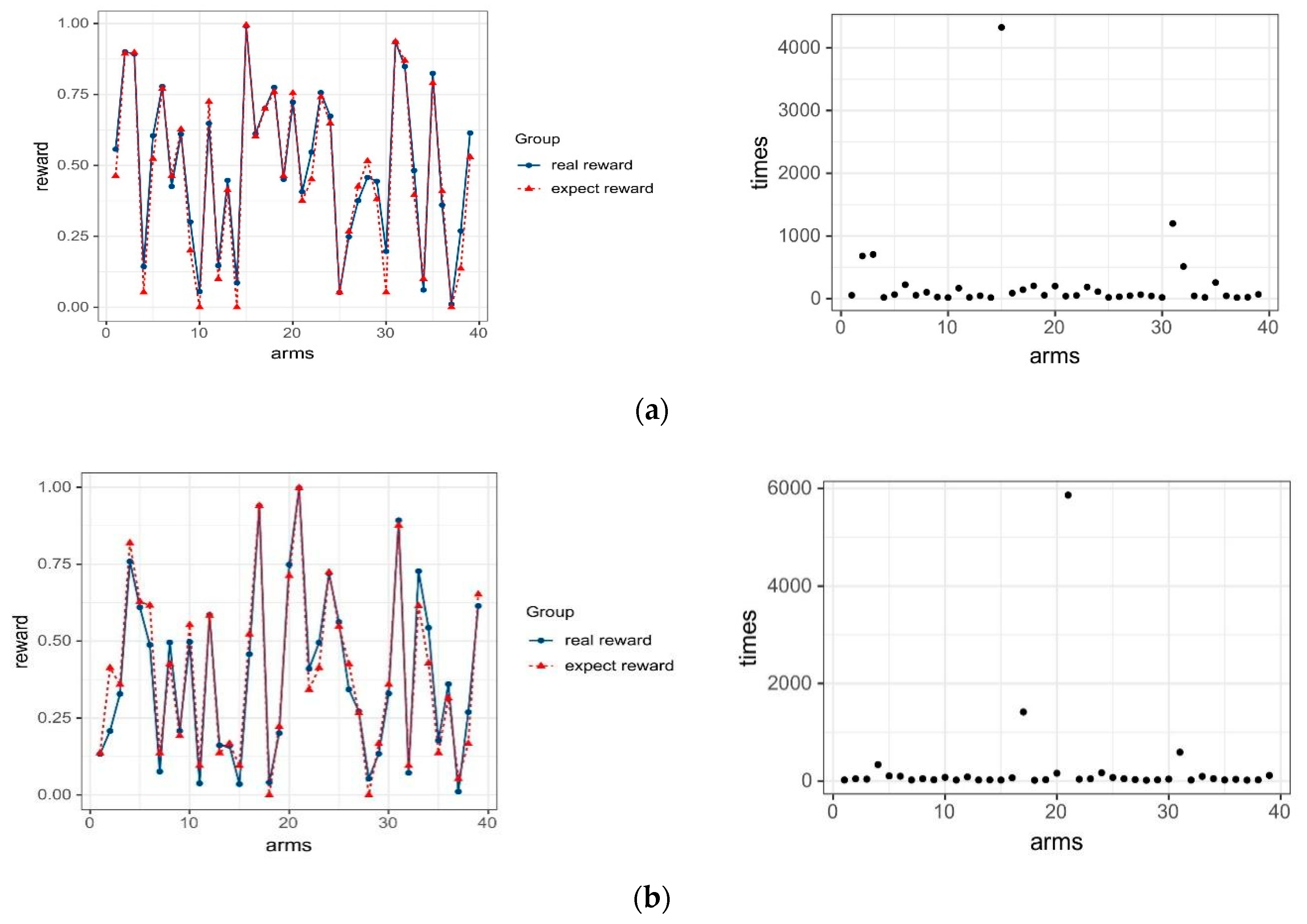
4.3.2. Arm Selection Analysis
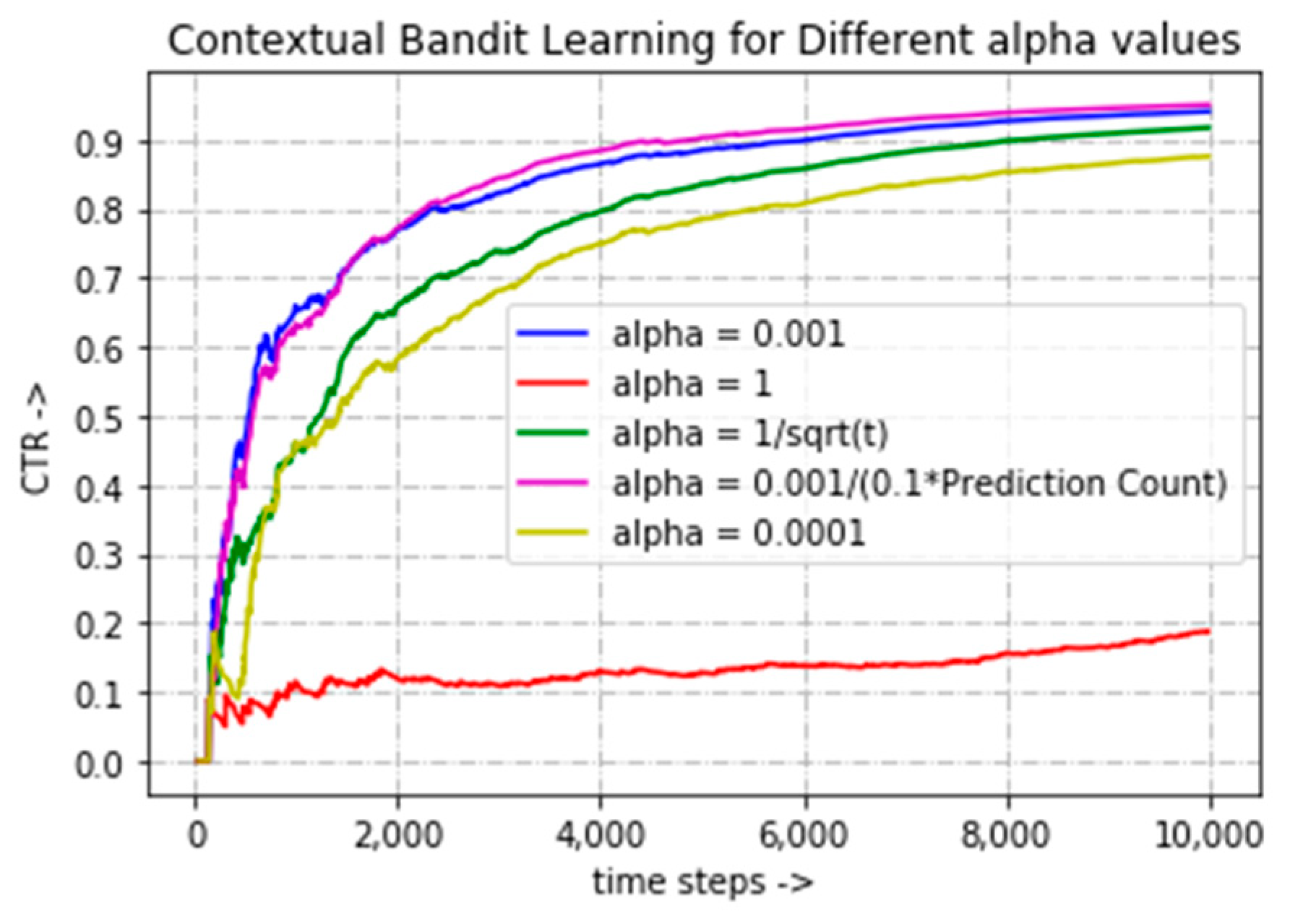
4.3.3. Parametric Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.; Cao, S.-J.; Yu, C.W. Development trend and challenges of sustainable urban design in the digital age. Indoor Built Environ. 2021, 30, 3–6. [Google Scholar] [CrossRef]
- Hering, D.; Cansev, M.E.; Tamassia, E.; Xhonneux, A.; Müller, D. Temperature control of a low-temperature district heating network with Model Predictive Control and Mixed-Integer Quadratically Constrained Programming. Energy 2021, 224, 120140. [Google Scholar] [CrossRef]
- Hussam, J.; Richard, M. Heat pipe based thermal management systems for energy-efficient data centres. Energy 2014, 77, 265–270. [Google Scholar] [CrossRef] [Green Version]
- Bai, L.; Liu, H.; Yu, C.W.; Yang, Z. Optimal diameter of district heating pipe network based on the hybrid operation of distributed variable speed pumps and regulating valves. Indoor Built Environ. 2021. [Google Scholar] [CrossRef]
- Liu, G.; Zhou, X.; Yan, J.; Yan, G. A temperature and time-sharing dynamic control approach for space heating of buildings in district heating system. Energy 2021, 221, 119835. [Google Scholar] [CrossRef]
- Li, H.; Long, E.; Zhang, Y.; Yang, H. Operation strategy of cross-season solar heat storage heating system in an alpine high-altitude area. Indoor Built Environ. 2020, 29, 1249–1259. [Google Scholar] [CrossRef]
- Yan, K.; Chong, A.; Mo, Y. Generative adversarial network for fault detection diagnosis of chillers. Build. Environ. 2020, 172, 106698. [Google Scholar] [CrossRef]
- Zhou, S.; O’Neill, Z.; O’Neill, C. A review of leakage detection methods for district heating networks. Appl. Therm. Eng. 2018, 137, 567–574. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhuang, X.; Min, S. A new method of leak location for the natural gas pipeline based on wavelet analysis. Energy 2010, 35, 3814–3820. [Google Scholar] [CrossRef]
- Jia, Z.; Liang, R.; Li, H. Pipeline Leak Localization Based on FBG Hoop Strain Sensors Combined with BP Neural Network. Appl. Sci. 2018, 8, 146. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Jiang, Y.; Zhou, Z. Machine learning-based leakage fault detection for district heating networks. Energy Build. 2020, 223, 110161. [Google Scholar] [CrossRef]
- Lei, C. Research on Leakage Fault Diagnosis of Heating Pipeline Network. Harbin Institute of Technology: Harbin, China, 2010. [Google Scholar]
- Morteza, Z.; Mehdi, S.; Karim, S. Pipeline leakage detection and isolation: An integrated approach of statistical and wavelet feature extraction with multi-layer perceptron neural network (MLPNN). J. Loss Prev. Process. Ind. 2016, 43, 479–487. [Google Scholar] [CrossRef]
- Berg, A.; Ahlberg, J.; Felsberg, M. Enhanced analysis of thermographic images for monitoring of district heat pipe networks. Pattern Recognition Letters. 2016, 83, 215–223. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Hou, J.; Chen, J.; Fu, Q.; Huang, G. Data mining approach for improving the optimal control of HVAC systems: An event-driven strategy. J. Build. Eng. 2021, 39, 102246. [Google Scholar] [CrossRef]
- Martin, D.M.; Johnson, F.A. A Multiarmed Bandit Approach to Adaptive Water Quality Management. Integr. Environ. Assess Manag. 2020, 16, 841–852. [Google Scholar] [CrossRef]
- Gittins, J.C. Bandit Processes and Dynamic Allocation Indices. J. R. Stat. Soc. Ser. B Stat. Methodol. 1979, 41, 148–164. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Jiang, Y.; Zhou, Z. Data for: Machine Learning-Based Leakage Fault Detection for District Heating Networks; Harbin Institute of Technology: Harbin, China, 2020. [Google Scholar] [CrossRef]
- Savchenko, A.V.; Milov, V.R. Decision Support in Intelligent Maintenance-planning Systems Based on Contextual Multi-armed Bandit Algorithm. Procedia Computer Science. 2017, 103, 316–323. [Google Scholar] [CrossRef]
- Sutton, R.; Barto, A. Reinforcement Learning: An Introduction, 2nd ed.; The MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Auer, P.; Cesa-Bianchi, N.; Fischer, P. Finite-time analysis of the multiarmed bandit problem. Mach. Learn. 2002, 47, 235–256. [Google Scholar] [CrossRef]
- Huang, K.H.; Lin, H.T. Linear Upper Confidence Bound Algorithm for Contextual Bandit Problem with Piled Rewards. In Proceedings of the Pacific-Asia Conference on Knowledge Discovery and Data Mining, Delhi, India, 11–14 May 2021; Springer: Cham, Swizterland, 2016; Volume 9652, pp. 143–155. [Google Scholar] [CrossRef]
- BI, W.; Guo, L. Product Pricing Algorithm Based on Multi-armed Bandit. Comput. Eng. Appl. 2021, 57, 224–231. [Google Scholar]
- Mark, A.M. Reinforcement Learning: MDP Applied to Autonomous Navigation. Mach. Learn. Appl. Int. J. 2017, 4, 1–10. [Google Scholar] [CrossRef]
- Kim, J.; Frank, S.; Braun, J.E.; Goldwasser, D. Representing Small Commercial Building Faults in EnergyPlus, Part I: Model Development. Buildings 2019, 9, 233. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Frank, S.; Im, P.; Braun, J.E.; Goldwasser, D.; Leach, M. Representing Small Commercial Building Faults in EnergyPlus, Part II: Model Validation. Buildings 2019, 9, 239. [Google Scholar] [CrossRef] [Green Version]
- Barone, G.; Buonomano, A.; Forzano, C.; Palombo, A. A novel dynamic simulation model for the thermo-economic analysis and optimisation of district heating systems. Energy Convers. Manag. 2020, 220, 113052. [Google Scholar] [CrossRef]
- Lei, C.; Zou, P. Application of neural network in heating network leakage fault diagnosis. J. Southeast Univ. Engl. Ed. 2010, 26, 173–176. [Google Scholar]
- Zhou, Z. Machine Learning; Tsinghua University Press: Beijing, China, 2016. [Google Scholar]
- Walsh, T.J.; Szita, I.; Diuk, C. Exploring compact reinforcement-learning representations with linear regression. In Proceedings of the Twenty-Fifth Conference on Uncertainty in Artificial Intelligence, Montreal, QC, Canada, 9 May 2012. [Google Scholar]
- Li, L.; Chu, W.; John, L.; Robert, E.S. A Contextual-Bandit Approach to Personalized News Article Recommendation; Association for Computing Machinery: New York, NY, USA, 2010; pp. 661–670. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Zhou, Z.; Fang, X. Fault detection and operation optimization in district heating substations based on data mining techniques. Appl. Energy 2017, 205, 926–940. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
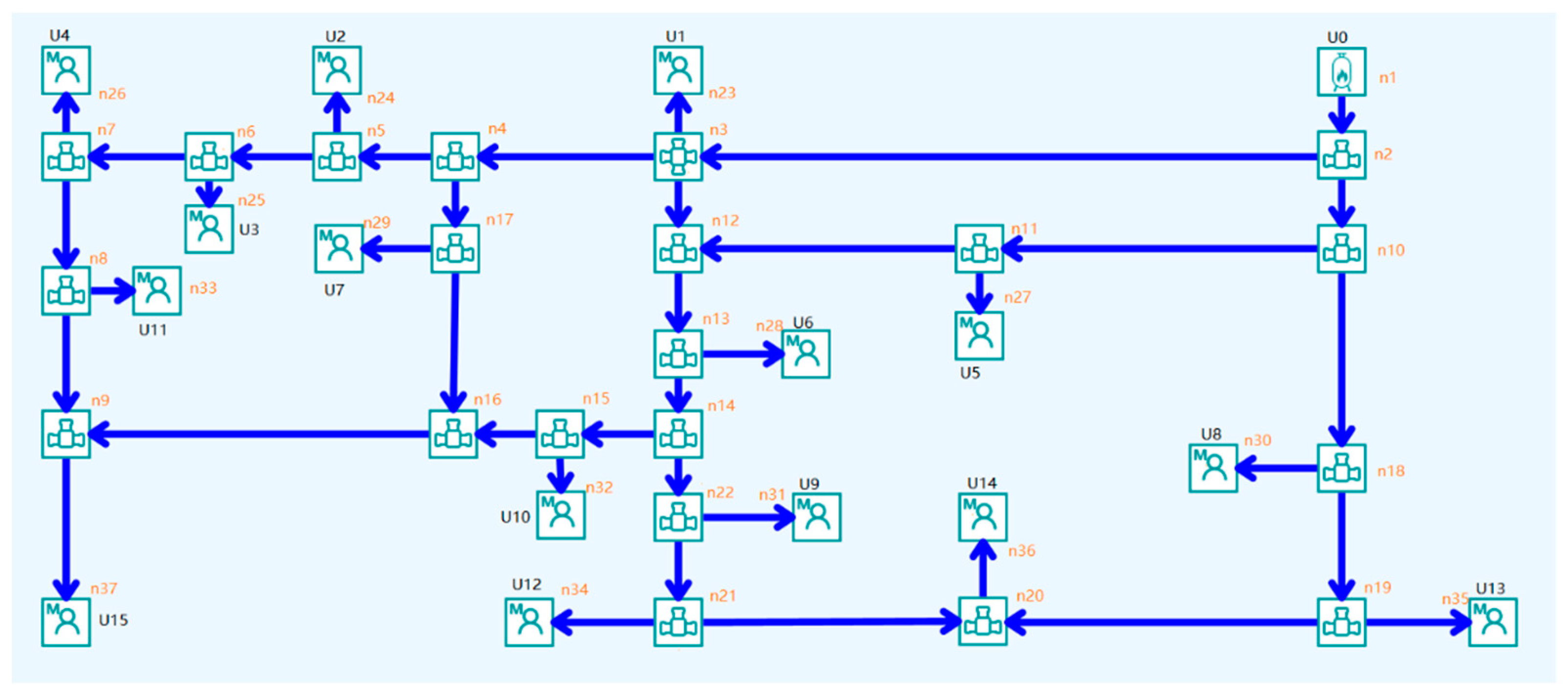
| User-ID | Pipe Name | Mass | User-ID | Pipe Name | Mass |
|---|---|---|---|---|---|
| U0 | n1 | 2196.4 | U8 | n30 | 458.9 |
| U1 | n23 | 75.7 | U9 | n31 | 118.7 |
| U2 | n24 | 172.7 | U10 | n32 | 49.6 |
| U3 | n25 | 214.4 | U11 | n33 | 183.2 |
| U4 | n26 | 116.2 | U12 | n34 | 187.4 |
| U5 | n27 | 148.3 | U13 | n35 | 67.2 |
| U6 | n28 | 25.3 | U14 | n36 | 143.4 |
| U7 | n29 | 16.9 | U15 | n37 | 218.5 |
| Parameter | Number |
|---|---|
| Number of main pipes (supply water and return water) | 78 |
| Number of flow sensors | 16 |
| Number of pressure sensors | 31 |
| Number of data collected per pipeline leakage | 100–400 |
| Number of training sets | 10,609 |
| Number of test sets | 4506 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Chen, J.; Fu, Q.; Wu, H.; Wang, Y.; Lu, Y. Detection of District Heating Pipe Network Leakage Fault Using UCB Arm Selection Method. Buildings 2021, 11, 275. https://doi.org/10.3390/buildings11070275
Shen Y, Chen J, Fu Q, Wu H, Wang Y, Lu Y. Detection of District Heating Pipe Network Leakage Fault Using UCB Arm Selection Method. Buildings. 2021; 11(7):275. https://doi.org/10.3390/buildings11070275
Chicago/Turabian StyleShen, Yachen, Jianping Chen, Qiming Fu, Hongjie Wu, Yunzhe Wang, and You Lu. 2021. "Detection of District Heating Pipe Network Leakage Fault Using UCB Arm Selection Method" Buildings 11, no. 7: 275. https://doi.org/10.3390/buildings11070275
APA StyleShen, Y., Chen, J., Fu, Q., Wu, H., Wang, Y., & Lu, Y. (2021). Detection of District Heating Pipe Network Leakage Fault Using UCB Arm Selection Method. Buildings, 11(7), 275. https://doi.org/10.3390/buildings11070275