
A Framework for Prefabricated Component Hoisting Management Systems Based on Digital Twin Technology


Abstract
:1. Introduction
2. Literature Review
2.1. Prefabricated Building Construction Management
2.2. Digital Twin
2.3. Research Emphasis and Novelty
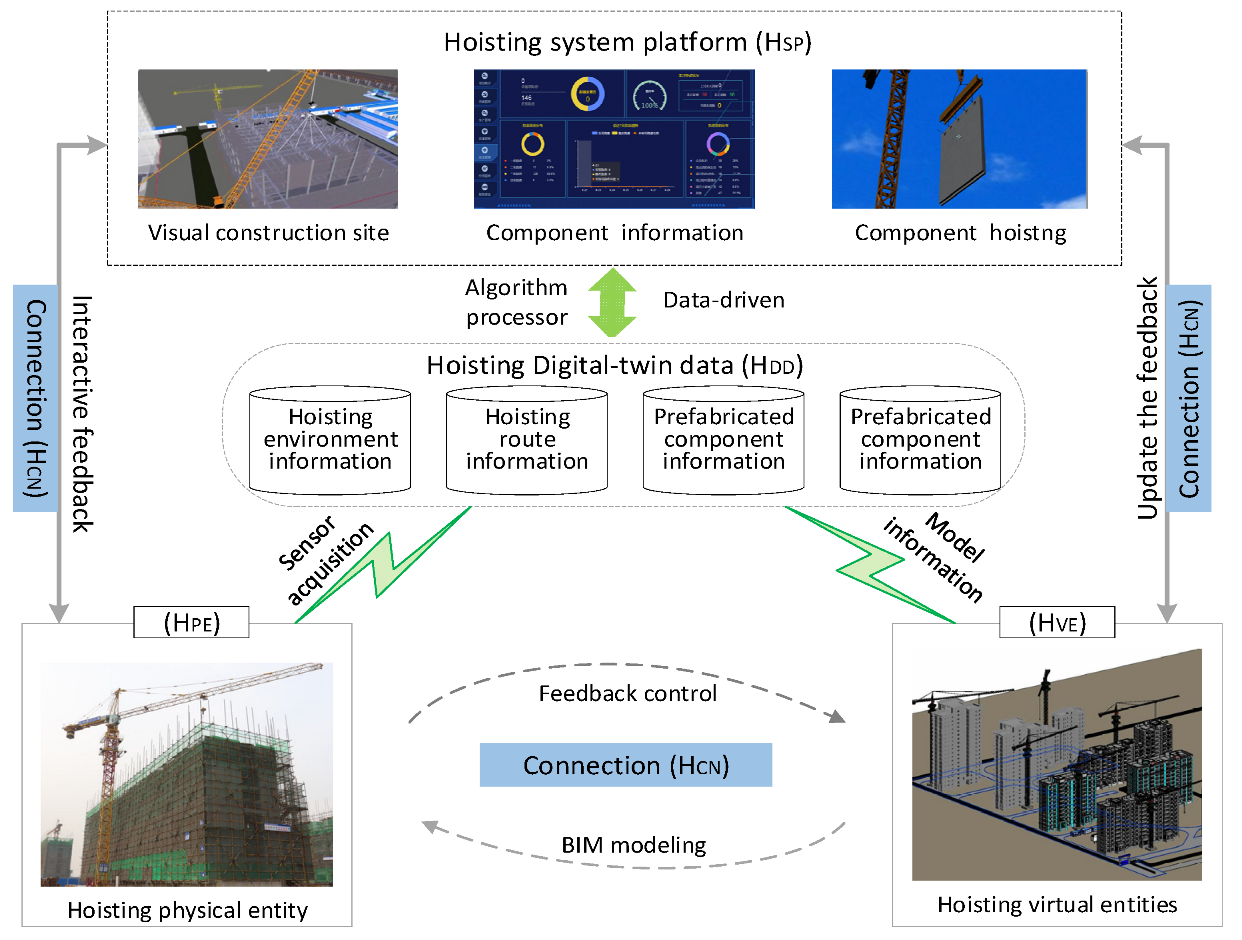
3. DTm for PC Hoisting
4. DT-Driven Hoisting Management Framework Construction
4.1. DT-BIM Model
4.2. Hoisting Route Planning Based on Dijkstra’s Algorithm
4.2.1. Prefabricated Component Hoisting Route Planning
4.2.2. Application Principle of Improved Dijkstra’s Algorithm
4.3. Method of Monitoring the Hoisting Process of PCs
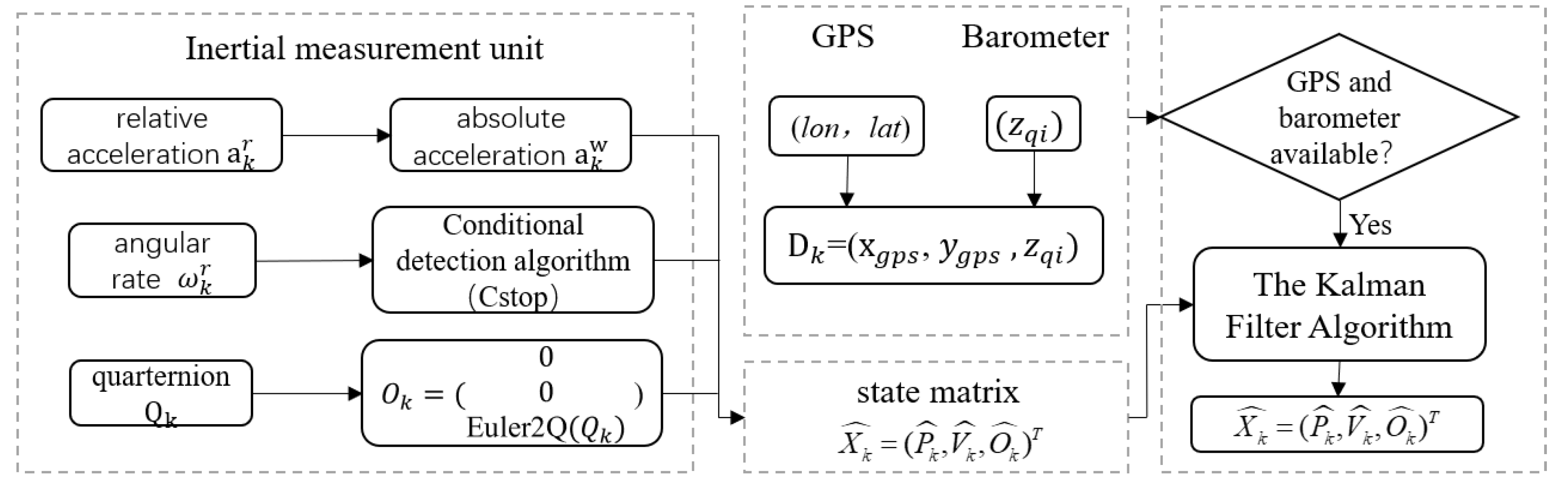
4.3.1. Fusion Algorithm Positioning in Hoisting Process
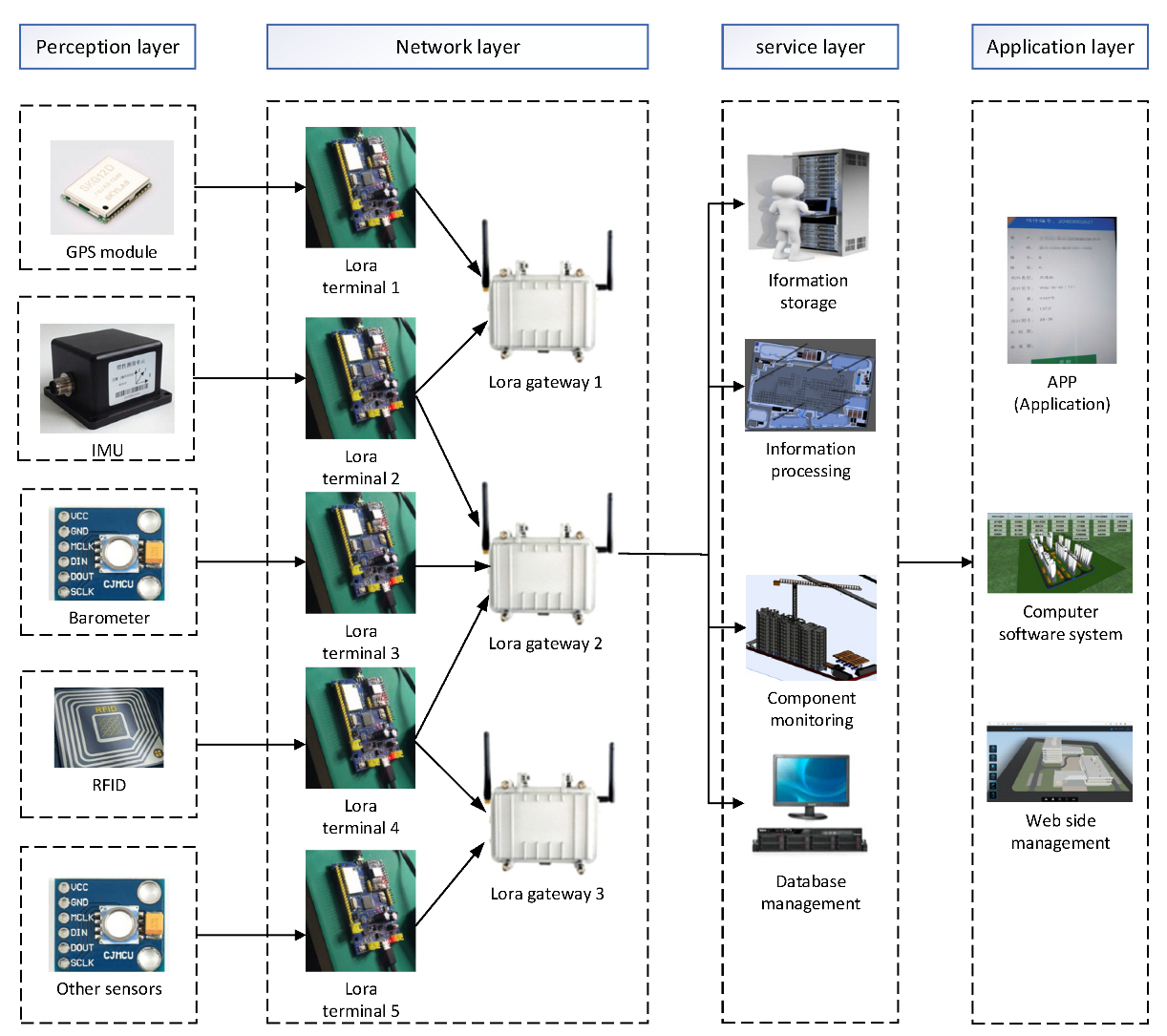
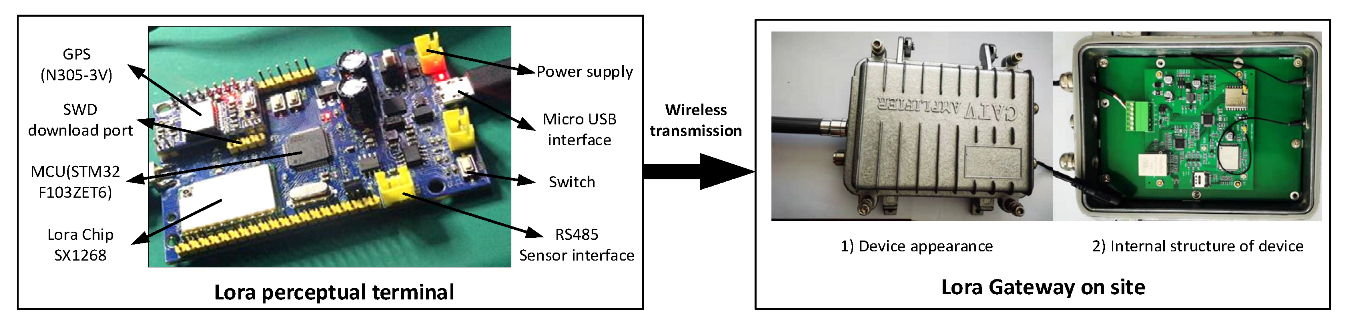
4.3.2. Information Transmission Based on LoRa Technology
5. DT Application Case Study
5.1. Application of Hoisting Route Planning Method
- (1)
- BIM model—a pre-established digital carrier of virtual mapping based on real physical space objects;
- (2)
- Sensor—actual hoisting process-related operation management and multi-dimensional and multi-level sensing tools;
- (3)
- Data—including data collected by sensors, construction plan data and historical reference data (physical list, design specifications, engineering drawings, on-site feedback, etc.);
- (4)
- Integration—the physical vehicle for the interaction between the physical and virtual digital worlds;
- (5)
- Analysis/Forecasting—analyze data through artificial intelligence algorithms and visualization programs and provide analytical decision-making and forecasting solutions;
- (6)
- DT—an accurate real-time digital model of the physical world.
5.2. Data Acquisition and Transmission Unit
5.3. Prefabricated Component Hoisting Route Monitoring
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arashpour, M.; Wakefield, R.; Blismas, N.; Minas, J. Optimization of process integration and multi-skilled resource utilization in off-site construction. Autom. Constr. 2015, 50, 72–80. [Google Scholar] [CrossRef]
- Li, Z.; Shen, G.Q.; Alshawi, M. Measuring the impact of prefabrication on construction waste reduction: An empirical study in China. Resour. Conserv. Recycl. 2014, 91, 27–39. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Yi, Y.; Wang, X. Exploring factors influencing construction waste reduction: A structural equation modeling approach. J. Clean. Prod. 2020, 276, 123185. [Google Scholar] [CrossRef]
- Zhong, R.; Peng, Y.; Xue, F.; Fang, J.; Zou, W.; Luo, H.; Thomas, N.S.; Lu, W.; Shen, G.Q.P.; Huang, G.Q. Prefabricated construction enabled by the Internet-of-Things. Autom. Constr. 2017, 76, 59–70. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, Z.; Jasper, M. Development of Intelligent Prefabs Using IoT Technology to Improve the Performance of Prefabricated Construction Projects. Sensors 2019, 19, 4131. [Google Scholar] [CrossRef] [Green Version]
- Bortolini, R.; Formoso, C.T.; Viana, D.D. Site logistics planning and control for engineer-to-order prefabricated building systems using BIM 4D modeling. Autom. Constr. 2019, 98, 248–264. [Google Scholar] [CrossRef]
- Ko, H.S.; Azambuja, M.; Lee, H.F. Cloud-based Materials Tracking System Prototype Integrated with Radio Frequency Identification Tagging Technology. Autom. Constr. 2016, 63, 144–154. [Google Scholar] [CrossRef]
- Dave, B.; Kubler, S.; Kary, F.; Lauri, K. Opportunities for enhanced lean construction management using Internet of Things standards. Autom. Constr. 2015, 61, 86–97. [Google Scholar] [CrossRef] [Green Version]
- Enrique, V.; Adán, A.; Carlos, C. Evolution of RFID Applications in Construction: A Literature Review. Sensors 2015, 15, 15988–16008. [Google Scholar]
- Lee, S.K.; Kwon, S. A conceptual framework of prefabricated building construction management system using reverse engineering, bim, and wsn. Adv. Constr. Build. Technol. Soc. 2014. Available online: https://www.iaarc-academy.com/download/CIB_IAARC_W119_CIC_2013_Proceedings.pdf#page=42 (accessed on 1 January 2022).
- Wang, X.; Wang, S.; Song, X.; Han, Y. IoT-Based Intelligent Construction System for Prefabricated Buildings: Study of Operating Mechanism and Implementation in China. Appl. Sci. 2020, 10, 6311. [Google Scholar] [CrossRef]
- Ma, Z.; Li, S. New Model of Project Management under the “Internet +” environment. J. Tongji Univ. Nat. Sci. 2018, 46, 135–139. (In Chinese). [Google Scholar]
- Ma, Z.; Yang, Z. Bim-based Functional Demand analysis of Intelligent Residential Parts Production Operation Planning and Control System. Civ. Archit. Eng. Inf. Technol. 2015, 7, 1–7. (In Chinese) [Google Scholar]
- Ma, Z.; Zhang, D.; Zhou, Q.; Liu, Z.; Yang, Z. Material management System of Subway Construction Site based on Mobile terminal and existing information System. Constr. Technol. 2012, 41, 5–9. (In Chinese) [Google Scholar]
- Liu, S.; Liu, Z.; Wang, W.; Zhao, Y. Application of NB-IoT Technology in prefabricated Building Construction Management. J. Civ. Eng. Manag. 2019, 36, 178–184. (In Chinese) [Google Scholar]
- Liu, Z.; Liu, S.; Wang, W.; Zhao, Y. An information solution for prefabricated building construction process based on low-power wide-area Internet of Things. Constr. Technol. 2018, 47, 117–122. (In Chinese) [Google Scholar]
- Froese, T.M. The impact of emerging information technology on project management for construction. Autom. Constr. 2010, 19, 531–538. [Google Scholar] [CrossRef]
- Wang, F.; He, F. Study of Hoist Perception System Based on IoT Technology. In Proceedings of the 2010 International Conference on Web Information Systems and Mining, Sanya, China, 23–24 October 2010; Volume 114, pp. 357–360. [Google Scholar]
- Zhou, C.; Luo, H.; Fang, W.; Wei, R.; Ding, L. Cyber-physical-system-based safety monitoring for blind hoisting with the internet of things: A case study. Autom. Constr. 2018, 97, 138–150. [Google Scholar] [CrossRef]
- Lee, G.; Kim, H.H.; Lee, C.J.; Ham, S.I.; Yun, S.H.; Cho, H.; Kim, B.K.; Kim, G.T.; Kim, K. A laser-technology-based hoisting-path tracking system for a robotic tower crane. Autom. Constr. 2009, 18, 865–874. [Google Scholar] [CrossRef]
- Cai, P.; Cai, Y.; Chandrasekaran, I.; Zheng, J. Parallel genetic algorithm based automatic path planning for crane hoisting in complex environments. Autom. Constr. 2016, 62, 133–147. [Google Scholar] [CrossRef]
- Zhang, J.; Shen, C.; Su, H.; Arafin, M.T.; Qu, G. Voltage Over-scaling-based Lightweight Authentication for IoT Security. IEEE Trans. Comput. 2021, 99, 1. [Google Scholar] [CrossRef]
- Li, B.; Liang, R.; Zhou, W.; Yin, H.; Cai, K. LBS Meets Blockchain: An Efficient Method with Security Preserving Trust in SAGIN. IEEE Internet Things J. 2021, 99, 1. [Google Scholar]
- Rosen, R.; Wichert, G.V.; Lo, G.; Bettenhausen, K.D. About The Importance of Autonomy and Digital Twins for the Future of Manufacturing. IFAC Pap. 2015, 48, 567–572. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication; Dassault Systèmes: Paris, France, 2014; Available online: https://www.3ds.com/fileadmin/PRODUCTS-SERVICES/DELMIA/PDF/Whitepaper/DELMIA-APRISO-Digital-Twin-Whitepaper.pdf, (accessed on 23 March 2015).
- Grieves, M. Virtually Perfect: Driving Innovative and Lean Products through Product Lifecycle Management; Space Coast Press: Cocoa Beach, FL, USA, 2011.
- Negri, E.; Fumagalli, L.; Macchi, M. A Review of the Roles of Digital Twin in CPS-based Production Systems. Procedia Manuf. 2017, 11, 939–948. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q.; Wang, L.; Nee, A.Y.C. DTs and cyber–physical systems toward smart manufacturing and industry 4.0: Correlation and comparison. Engineering 2019, 5, 653. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Qi, Q.; Zhang, H.; Sui, Y.; Wang, T.; Xu, H.; Huang, Z.; et al. Digital Twin Five dimensional Model and its Application in Ten Fields. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. (In Chinese) [Google Scholar]
- Wu, C.; Zhou, Y.; Pessôa, M.V.P.; Peng, Q.; Tan, R. Conceptual digital twin modeling based on an integrated five-dimensional framework and TRIZ function model. J. Manuf. Syst. 2020, 58, 79–93. [Google Scholar] [CrossRef]
- Wang, P.; Luo, M. A digital twin-based big data virtual and real fusion learning reference framework supported by industrial internet towards smart manufacturing. J. Manuf. Syst. 2021, 58, 16–32. [Google Scholar] [CrossRef]
- Qiu, C.; Zhou, S.; Liu, Z.; Gao, Q.; Tan, J. Digital assembly technology based on augmented reality and digital twins: A review. Virtual Real. Intell. Hardw. 2019, 1, 597–610. [Google Scholar] [CrossRef]
- Bazaz, S.M.; Lohtander, M.; Varis, J. Availability of Manufacturing data resources in Digital Twin. In Proceedings of the 30th International Conference on Flexible Automation and Intelligent Manufacturing (FAIM2021), Athens, Greece, 15–18 June 2021. [Google Scholar]
- Tao, F.; Zhang, M.; Cheng, J.; Qi, Q. Digital Twin Workshop—A New Mode of workshop Operation in the future. Comput. Integr. Manuf. Syst. 2017, 23, 1–9. [Google Scholar]
- Tao, F.; Cheng, Y.; Cheng, J.; Zhang, M.; Xu, W.; Qi, Q. Digital Twin Workshop Information physical Fusion Theory and Technology. Comput. Integr. Manuf. Syst. 2017, 23, 1603–1611. [Google Scholar]
- Liu, W.; Tao, F.; Cheng, J.; Zhang, L.; Yi, W. Digital Twin Satellites: Concepts, Key technologies and Applications. Comput. Integr. Manuf. Syst. 2020, 26, 565–588. [Google Scholar]
- Meng, S.; Ye, Y.; Yang, Q. Digital twin and its aerospace applications. J. Aeronaut. 2020, 41, 1–12. (In Chinese) [Google Scholar]
- CAICT—China Academy of Information and Communications Technology. What Does the Xiongan Digital Twin City and Smart City Look Like? Take a Look at Some Real-Life Example…. Available online: http://www.sohu.com/a/231025717_354877, (accessed on 8 May 2018).
- CAICT—Chinese Academy of Information and Communications Technology. The Third Symposium on Digital Twin Cities Was Held in Beijing. Available online: http://www.caict.ac.cn/xwdt/ynxw/201806/t20180625_175807.htm (accessed on 25 June 2018).
- Yua, J.; Songa, Y.; Tang, D.; Dai, J. A Digital Twin approach based on nonparametric Bayesian network for complex system health monitoring. J. Manuf. Syst. 2021, 58, 293–304. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, G.; Zhang, A.; Huang, C. Intelligent Tensioning Method for Prestressed Cables Based on Digital Twins and Artificial Intelligence. Sensor 2020, 20, 7006. [Google Scholar] [CrossRef]
- Liu, Z.; Bai, W.; Du, X.; Zhang, A.; Jiang, A. Digital Twin-based Safety Evaluation of Prestressed Steel Structure. Adv. Civ. Eng. 2020, 2020, 8888876. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, A.; Wang, W. A Framework for an Indoor Safety Management System Based on Digital Twin. Sensor 2020, 20, 5771. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, A.; Wang, W.; Wang, J. Digital Twin Driven dynamic fire safety evacuation method for Winter Olympic Stadium. J. Tongji Univ. Nat. Sci. 2020, 48, 962–971. (In Chinese) [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hoisting Situation | Prefabricated Floor Hoisting Path | Length of Hoisting Route (m) | Reduced Length (m) | Optimized Effect (%) |
|---|---|---|---|---|
| 1 | PA → P6 → P47 → PB | 113.35 | ∕ | ∕ |
| 2 | PA → P17 → P39 → P40 → PB | 90.857 | 22.493 | 19.844 |
| 3 | PA → P9 → P31 → P46 → P47 → PB | 82.33 | 31.02 | 27.367 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Cao, C.; Liu, Z. A Framework for Prefabricated Component Hoisting Management Systems Based on Digital Twin Technology. Buildings 2022, 12, 276. https://doi.org/10.3390/buildings12030276
Zhao Y, Cao C, Liu Z. A Framework for Prefabricated Component Hoisting Management Systems Based on Digital Twin Technology. Buildings. 2022; 12(3):276. https://doi.org/10.3390/buildings12030276
Chicago/Turabian StyleZhao, Yuhong, Cunfa Cao, and Zhansheng Liu. 2022. "A Framework for Prefabricated Component Hoisting Management Systems Based on Digital Twin Technology" Buildings 12, no. 3: 276. https://doi.org/10.3390/buildings12030276
APA StyleZhao, Y., Cao, C., & Liu, Z. (2022). A Framework for Prefabricated Component Hoisting Management Systems Based on Digital Twin Technology. Buildings, 12(3), 276. https://doi.org/10.3390/buildings12030276