In general, the first mode of an MDOF system possesses a dominant impact on the total responses of free-vibration and forced-vibration under specific external excitation, such as an earthquake tends to excite the response of a structure mainly in its first mode [
31]. However, higher modes of an MDOF system may contribute more to the response than the first one, and the determination of
should consider both the initial structural properties of the system and the frequency characteristics of the external excitation. It should be noted that the importance of any mode in the total dynamic response depends on two factors: (1) The DMF that depends on the frequency ratio of the external excitation to the mode, as discussed in the previous section; (2) the modal participation factor (MPF) that is determined by the interaction of the mode shape with the spatial distribution of the external excitation.
4.1. Determination of Based on DMF
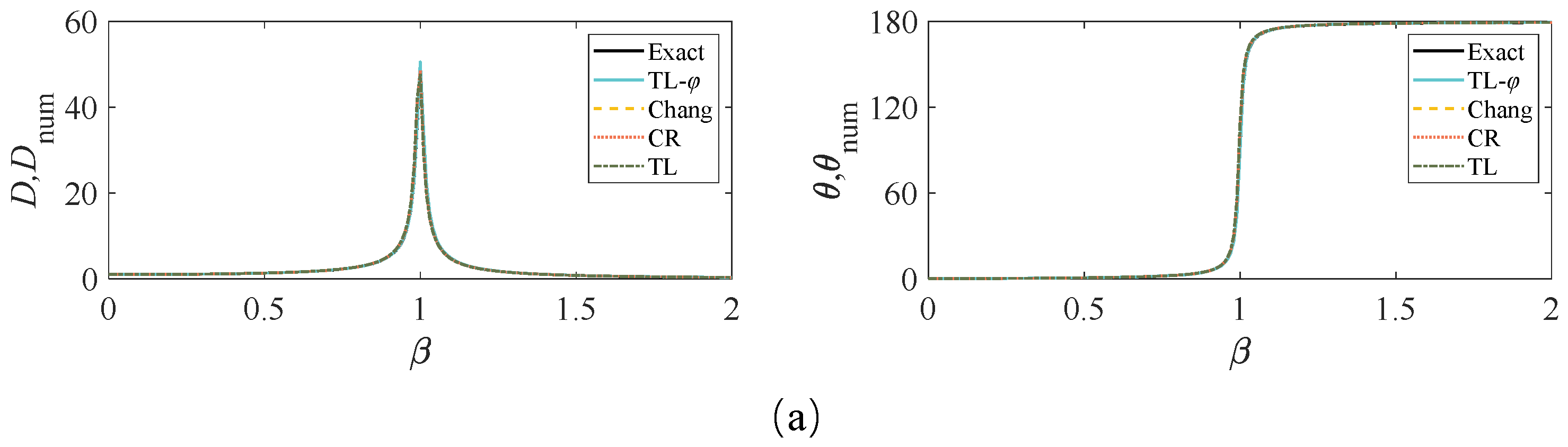
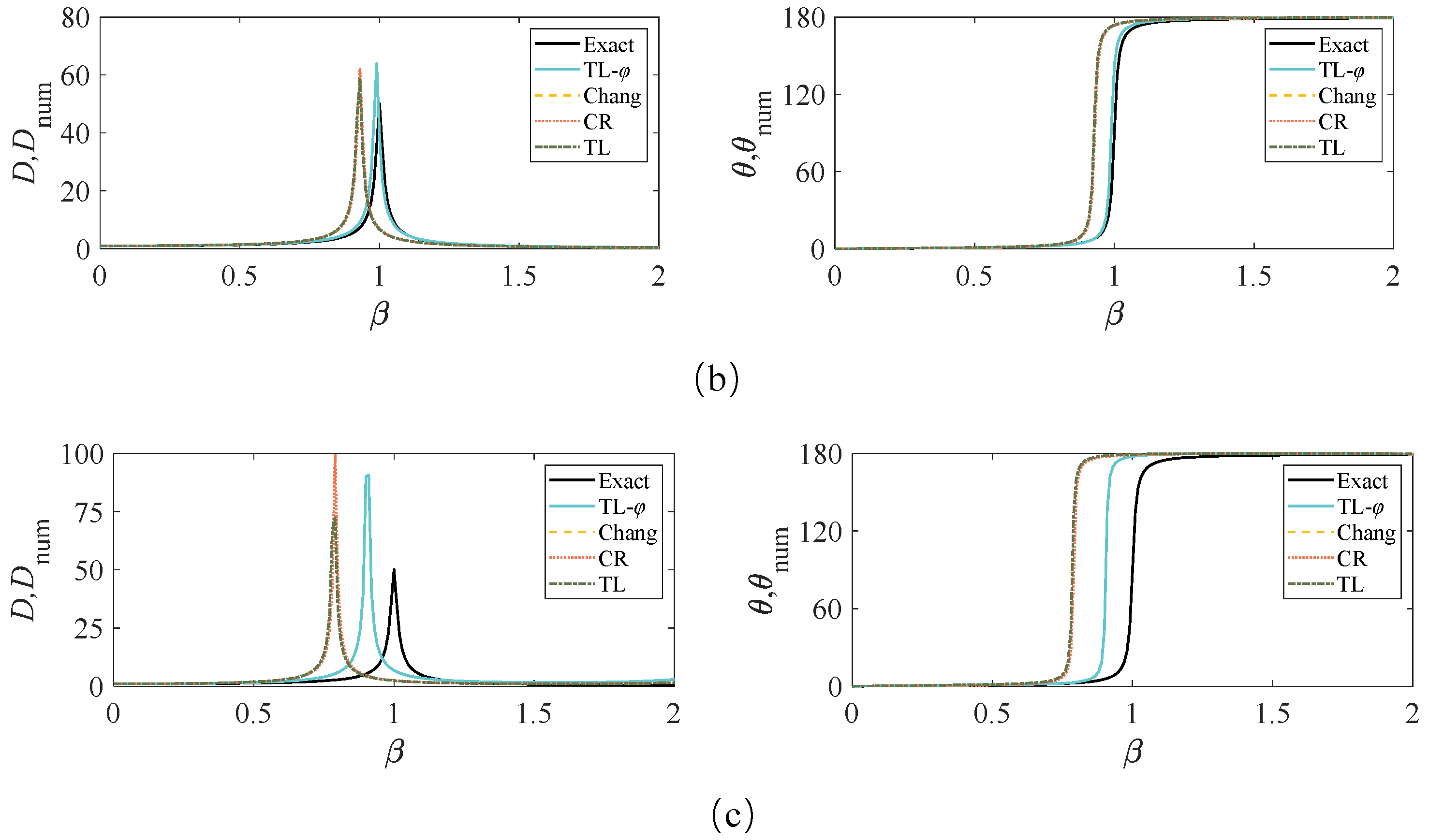
According to the frequency response analysis, the maximum response amplitude occurs at a frequency ratio approaching close to (slightly less than) unity, i.e., the external excitation frequency approaches a certain modal frequency, known as resonance. For an MDOF system, an arbitrary external excitation will excite the resonance response of any mode, and the determination of should consider that relates the excitation frequency to the ith mode frequency .
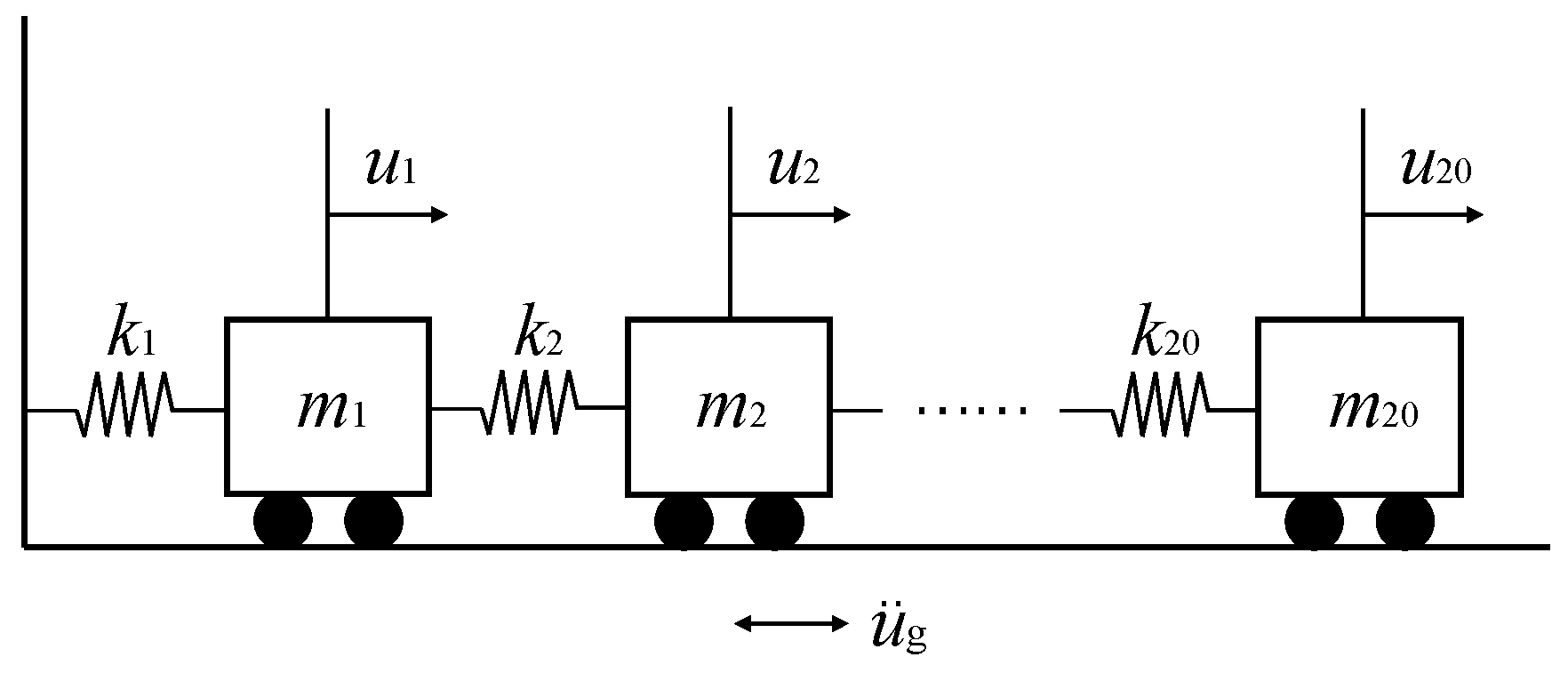
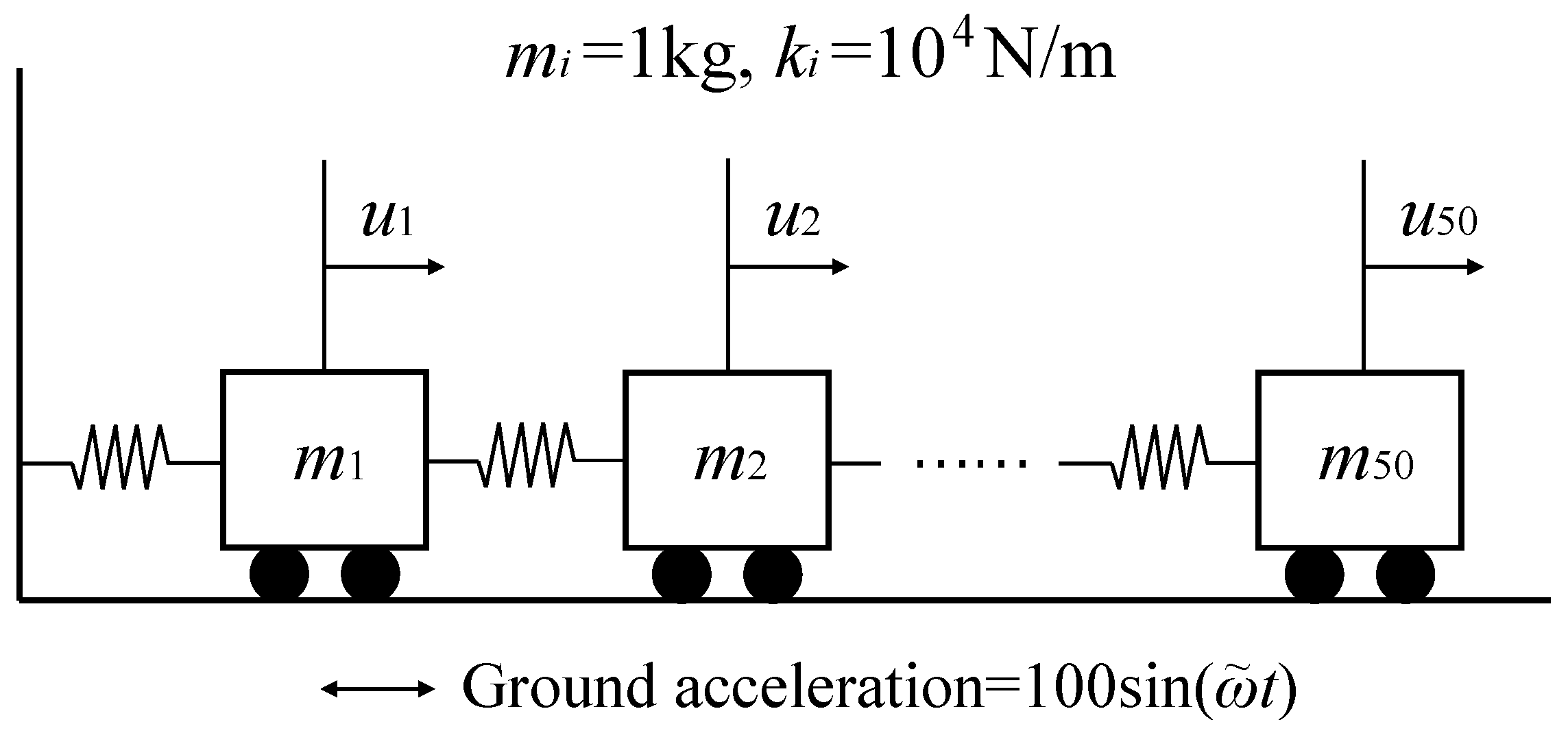
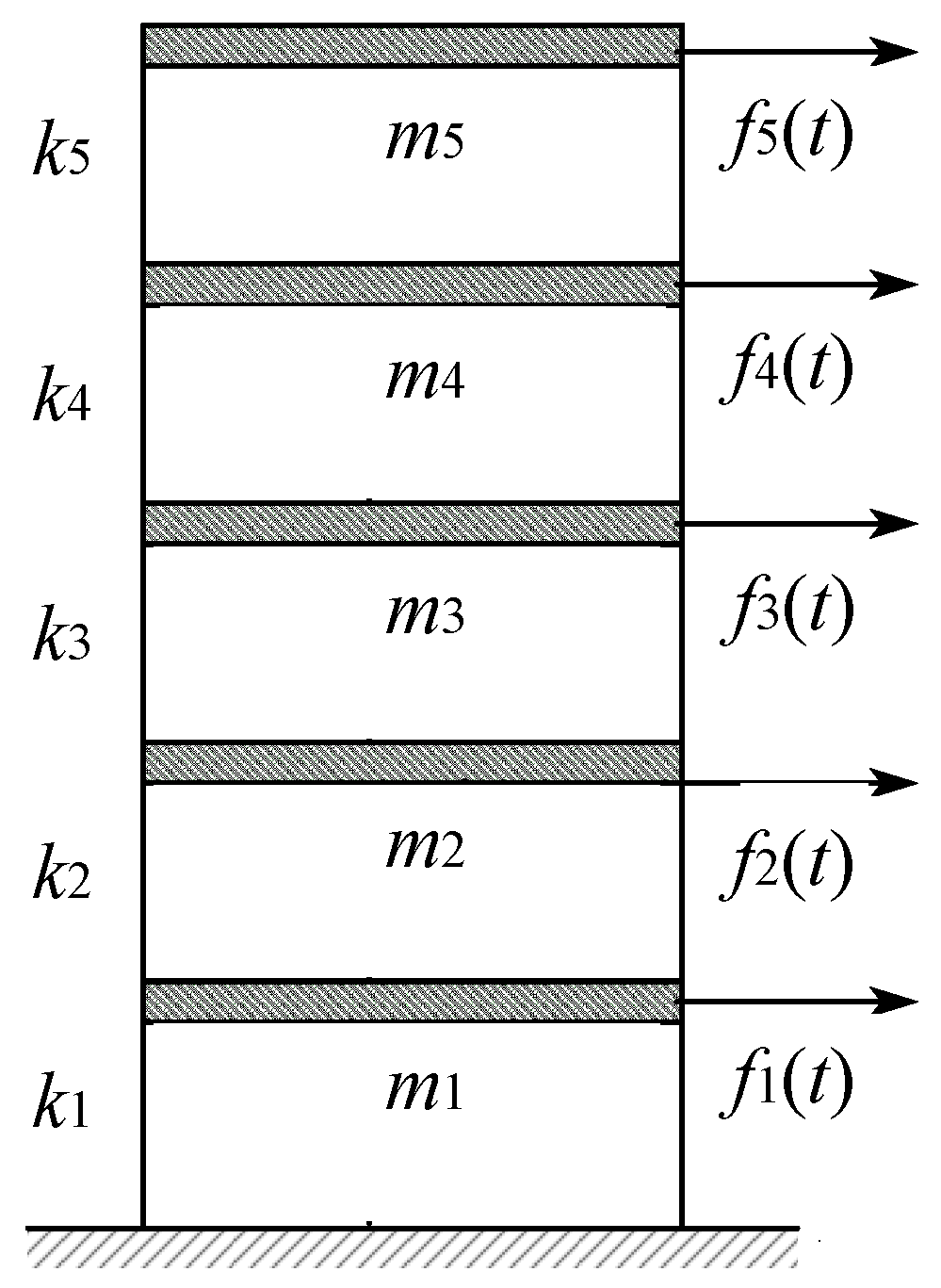
In this section, a spring-mass system with 20-DOF is set up to investigate the relationship between
and
, as shown in
Figure 2. A total of 12 models with different structural properties are intentionally designed, and the fundamental frequencies of each model are shown in
Table 1. The system is assumed to be linear elastic and is subjected to a ground acceleration
of sine-wave form as follows,
and then,
in Equation (
1) is expressed as
TL-
algorithms with
for
are applied to calculate the displacement responses of the system under the harmonic excitation with
, respectively. One error indicator, normalized root-mean-square error (NRMSE) that is sensitive to frequency differences of the dynamic responses, is adopted for accuracy analysis and defined as
where,
u is the displacement of
; subscript NS and ES represent the numerical solution obtained by TL-
algorithms and exact solution derived from the mode-superposition method, respectively;
is the number of the samples, where
t is the duration of the external excitation and
s is the time step for numerical simulations.
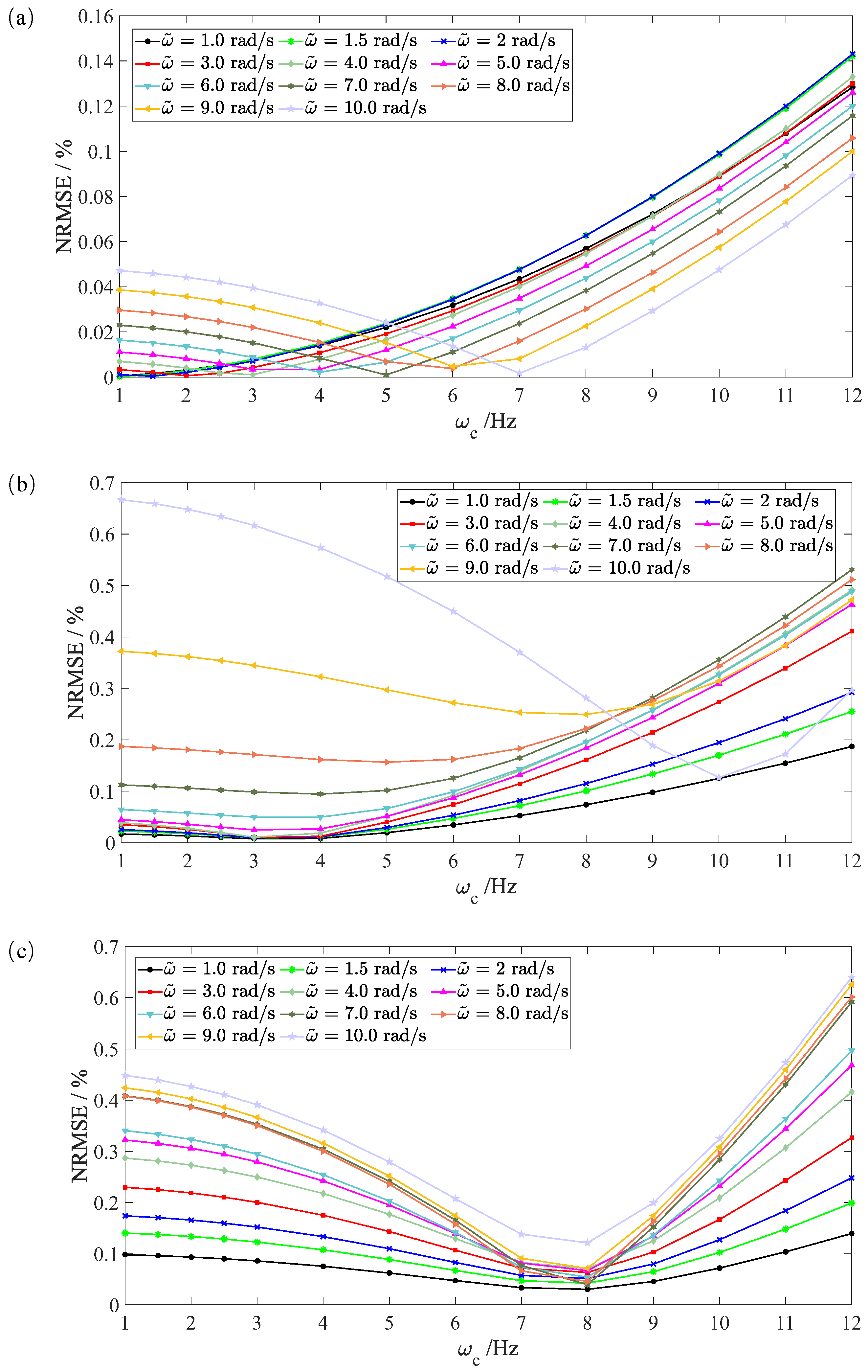
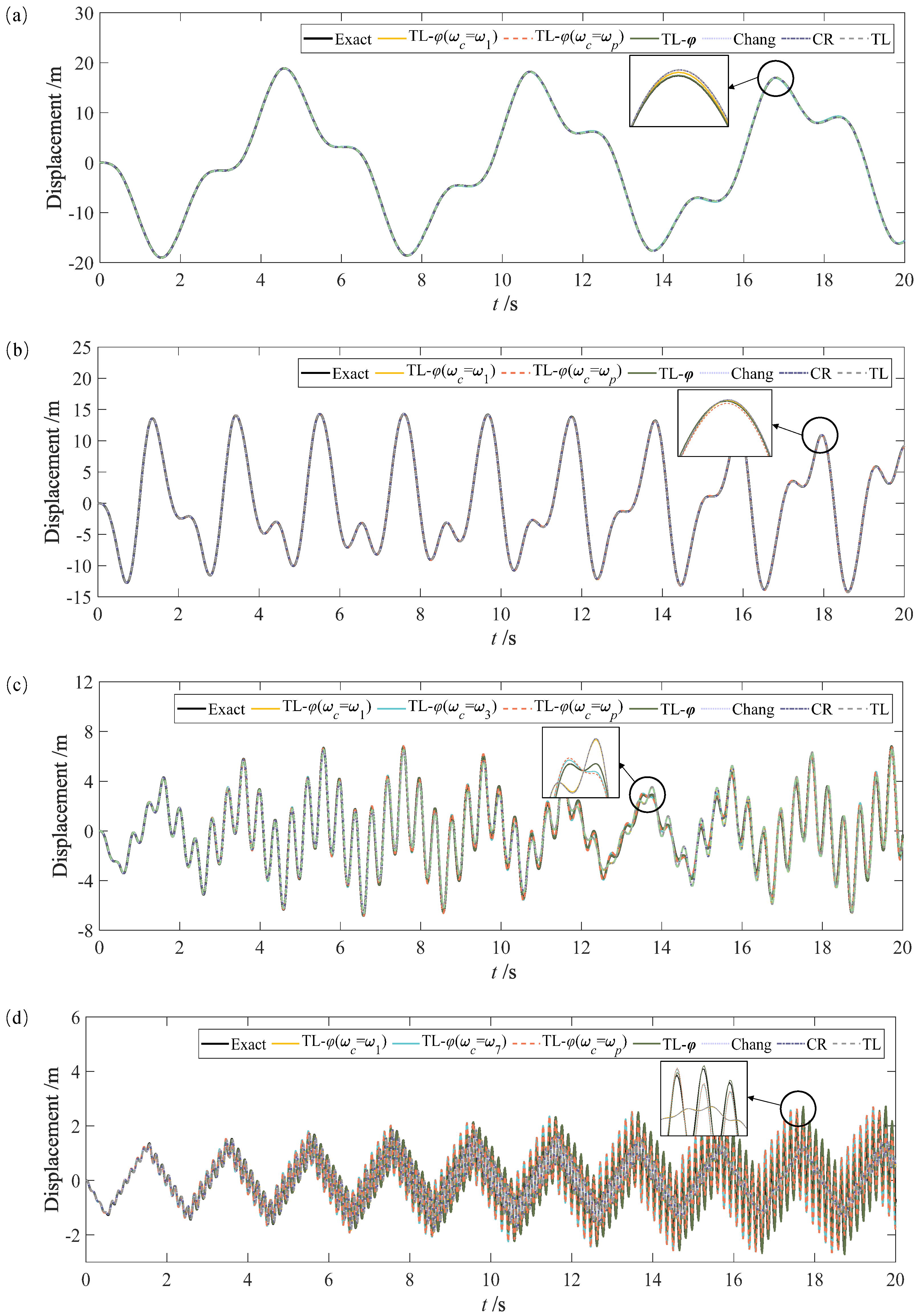
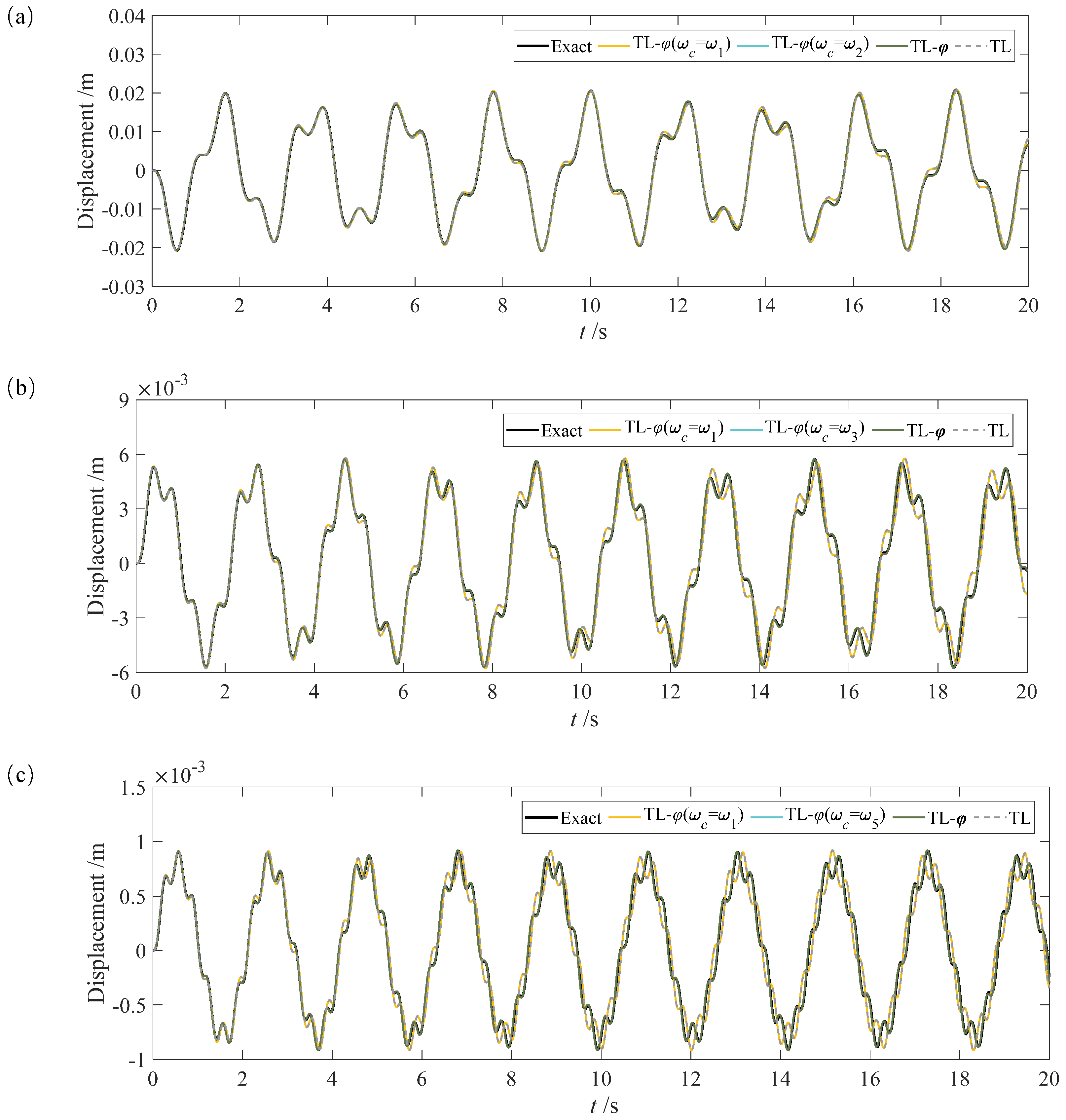
Plotted in
Figure 3a–c are the variations of NRMSE with the increasing of
for models 1, 8 and 10, and similar curves can be obtained for the rest of the models. It can be seen that the NRMSE is minimal at: (1)
when
, i.e.,
; (2)
when
, i.e.,
; (3) otherwise,
is between values of
and
, which verifies the importance of
and
in determining
for the calculation of
in TL-
algorithm. In order to determine the value of
in (3), more numerical models with different values of
(less than 10 Hz) are designed to calculate the optimal critical frequencies
that correspond to the minimal NRMSE. To diminish the effect of the fundamental frequency randomly selected for numerical simulation on fitting results, arithmetic mean values of
for each model are calculated according to the following formula,
in which,
n is the number of the harmonic excitation
.
Table 2 lists the ratio of the mean values of
to
and
for the 15 models.
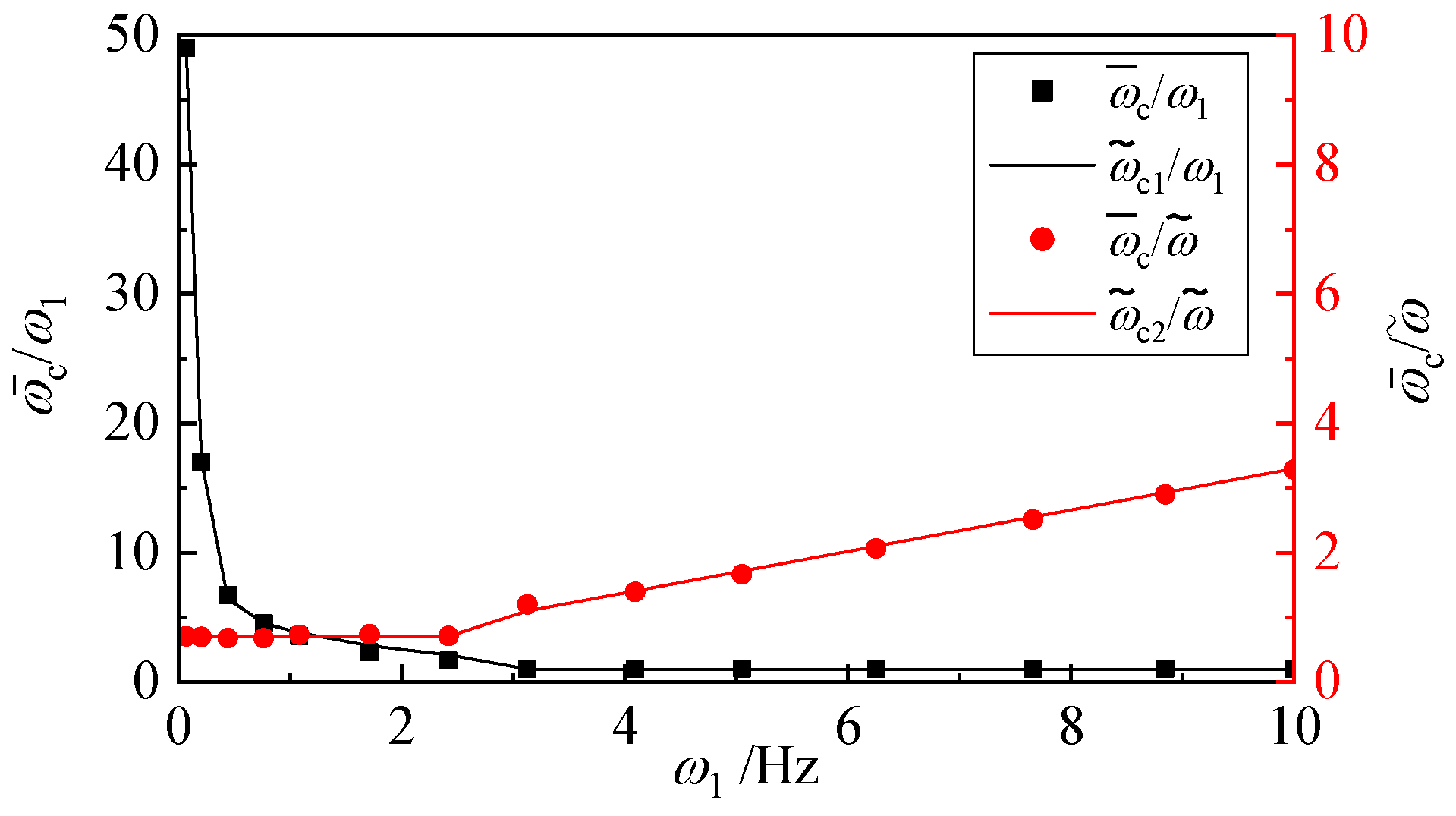
Figure 4 shows the scatter diagram of mean values varying with
, which indicates that
decay exponentially with an increasing of
, while
increases linearly with an increasing of
. According to these rules, a regression analysis is conducted and the fitting formulas are
where,
and
are predicted values of
in Equation (
15). The smaller one of the two radios derived from Equations (
16) and (
17) is considered to calculate
. Then, the criterion of determining
for the calculation of
in TL-
algorithm when applied to MDOF systems can be expressed as
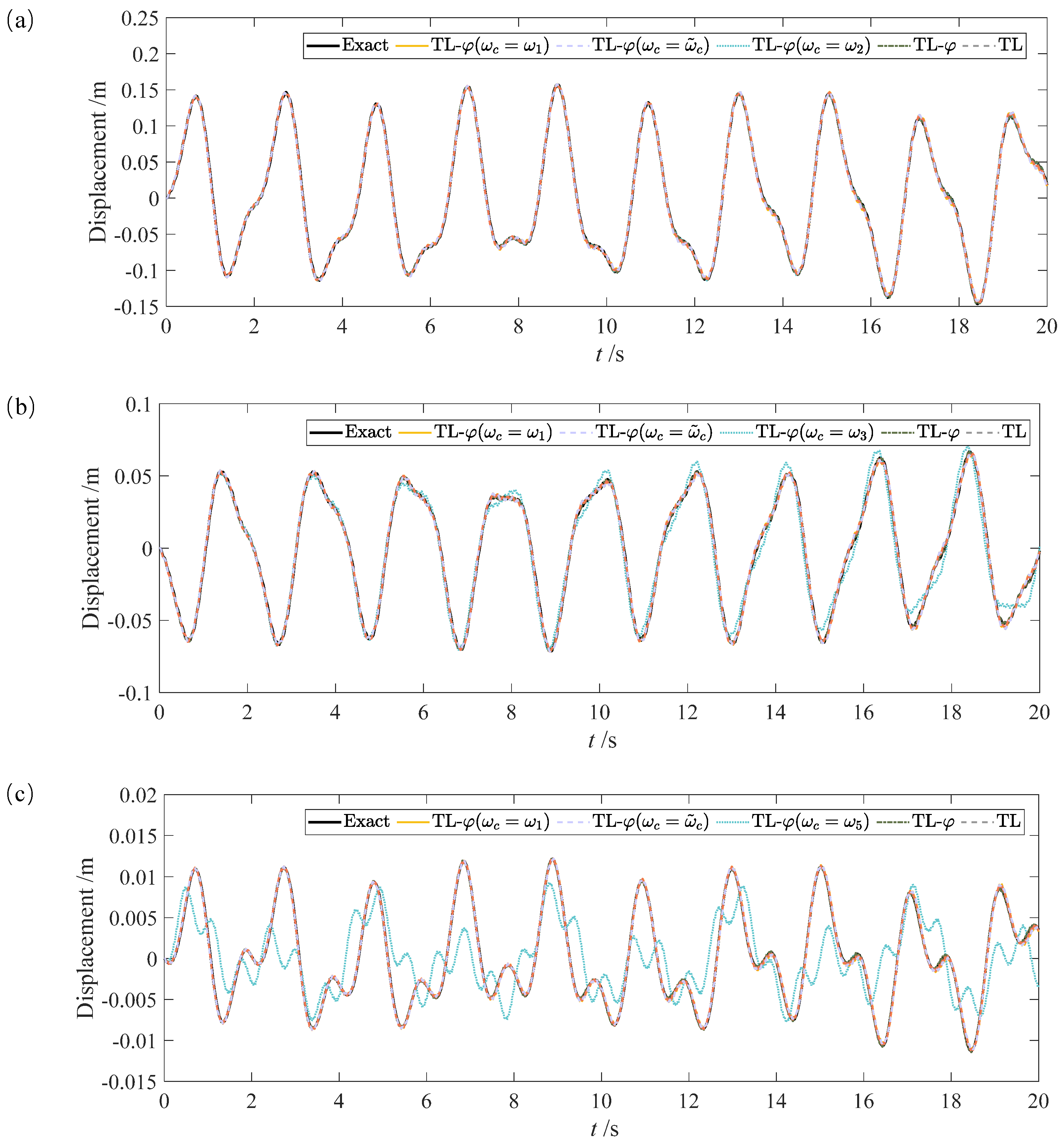
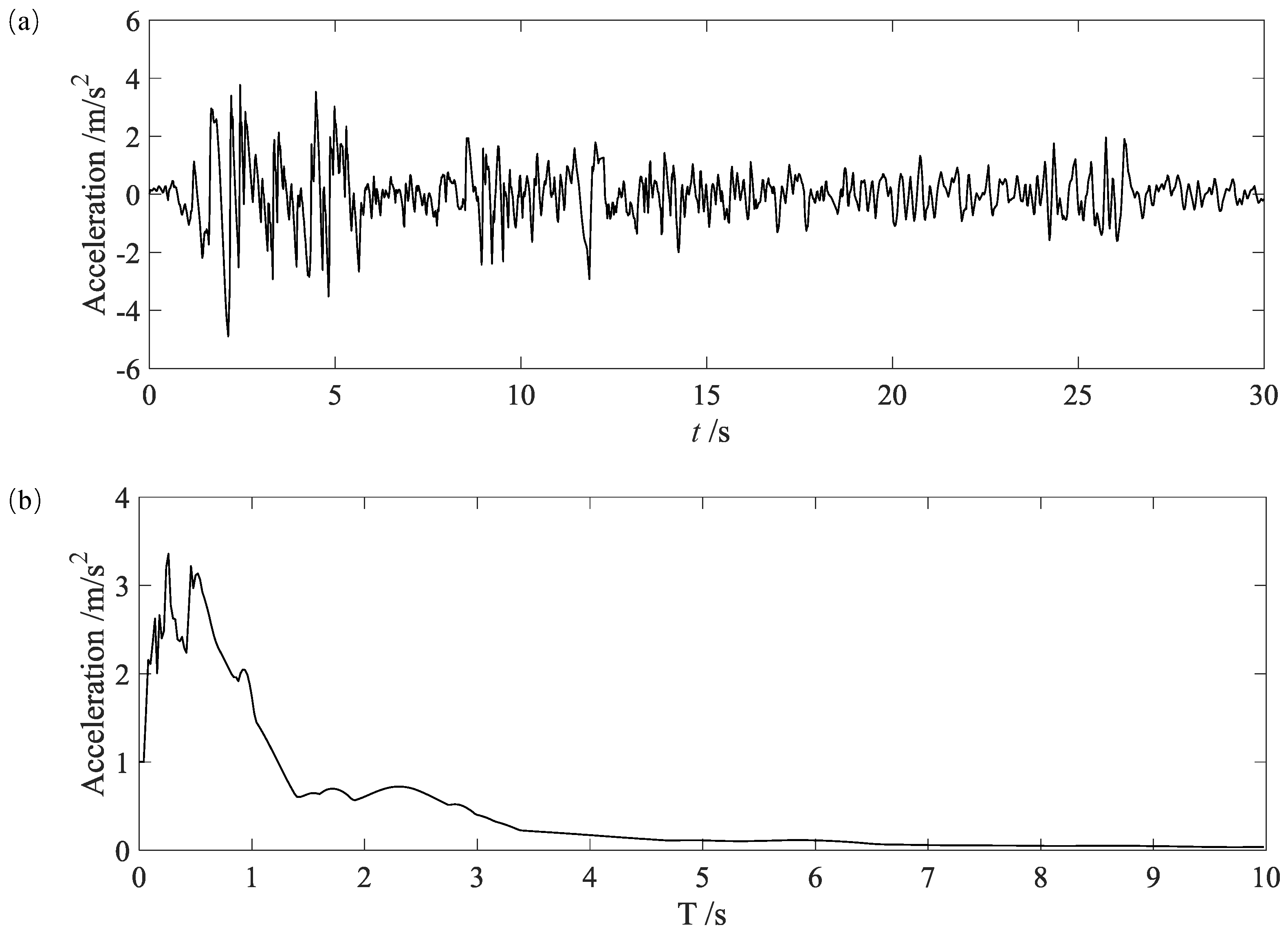
When an MDOF system is subjected to an earthquake,
in Equation (
12) represents a practical seismic record. It is known that the contribution of the first mode to the dynamic responses of the system is much greater than that of the other higher-order modes when the fundamental frequency of the system is close to or higher than the main frequency component of a seismic motion. In addition, defining
will achieve relatively high accuracy of the dynamic responses. However, the effect of the high-order modes on structural dynamics cannot be ignored when the fundamental frequency of the system is lower than the main frequency component of a seismic motion. Thus, it is of great interest to examine the influence of the spectral characteristic of a seismic motion on the determination of
. Then,
will be replaced by the peak frequency of the response spectrum
in the following.
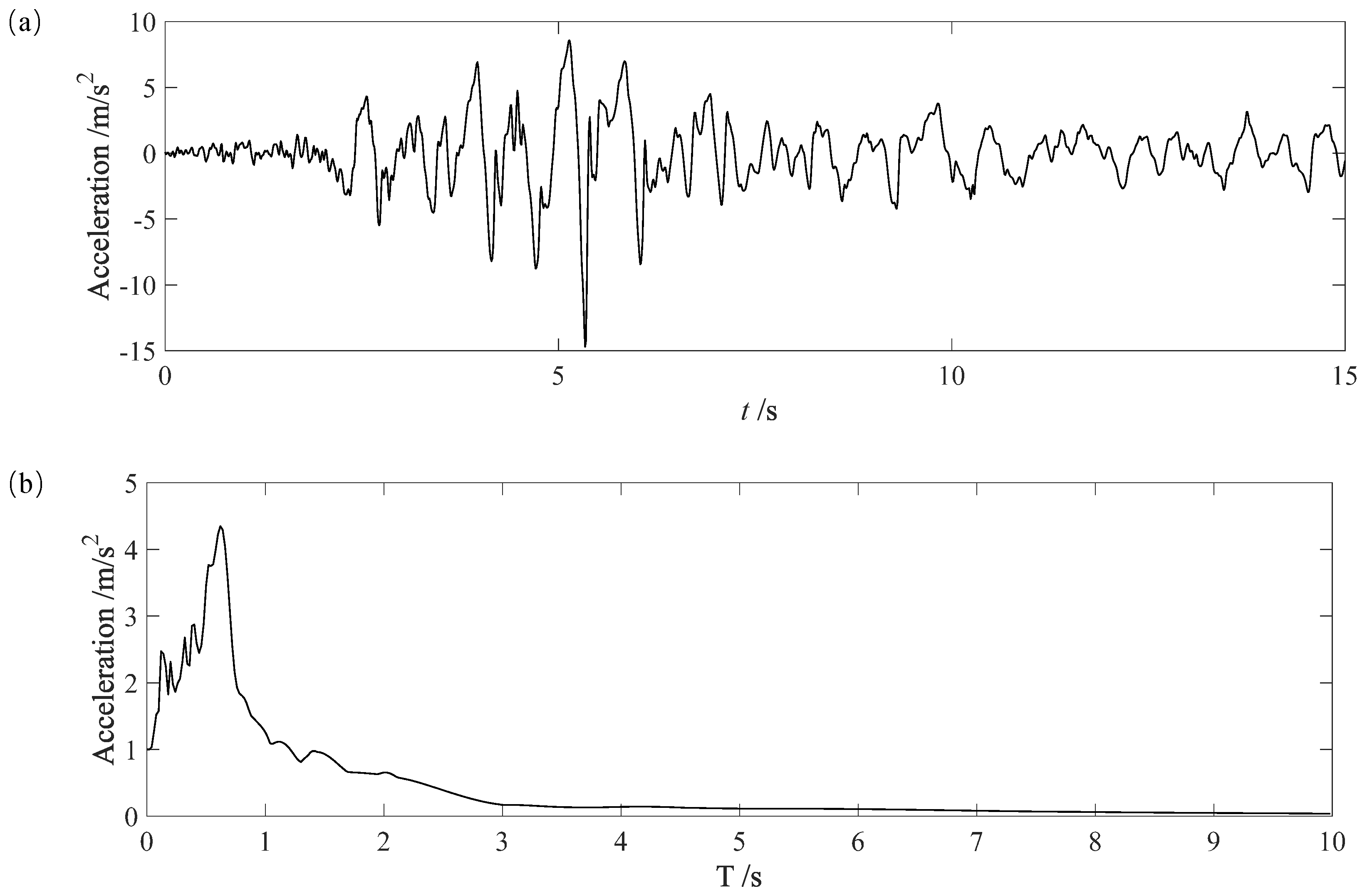
Numerical analysis of the 20-DOF spring-mass system is performed to establish a selection criterion of
. A total of 14 seismic waves are selected as external excitations, and
of each wave is shown in
Table 3. Moreover, 10 groups of structural properties are designed to investigate the relationship between
and
as well as
.
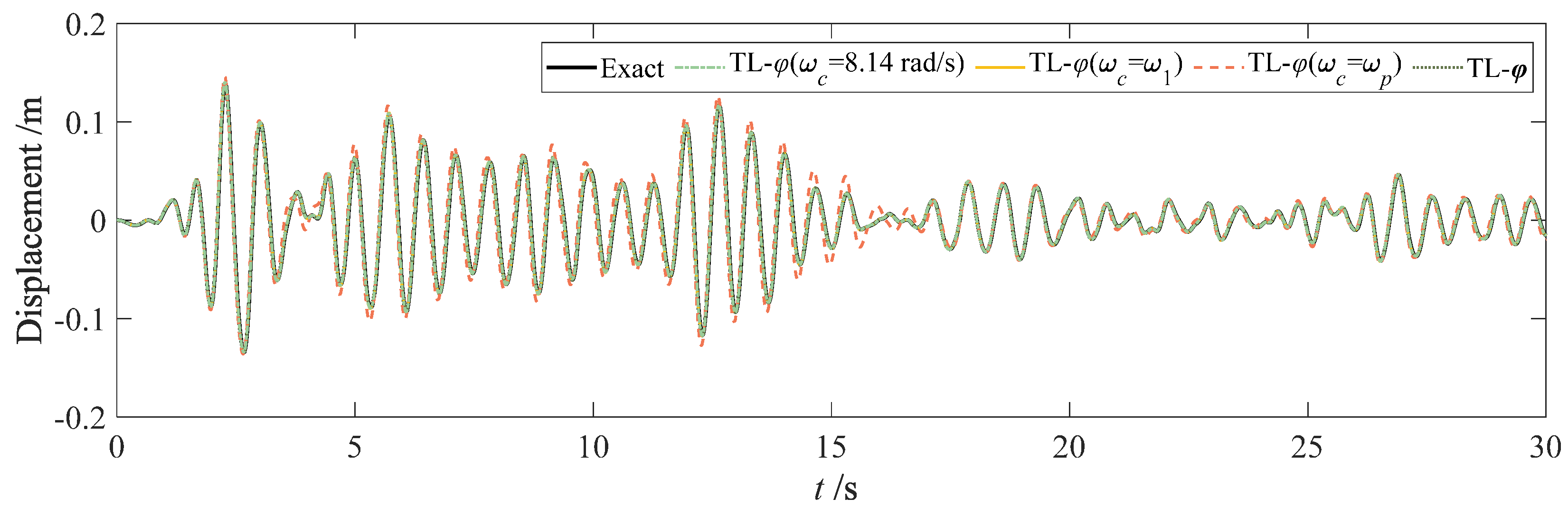
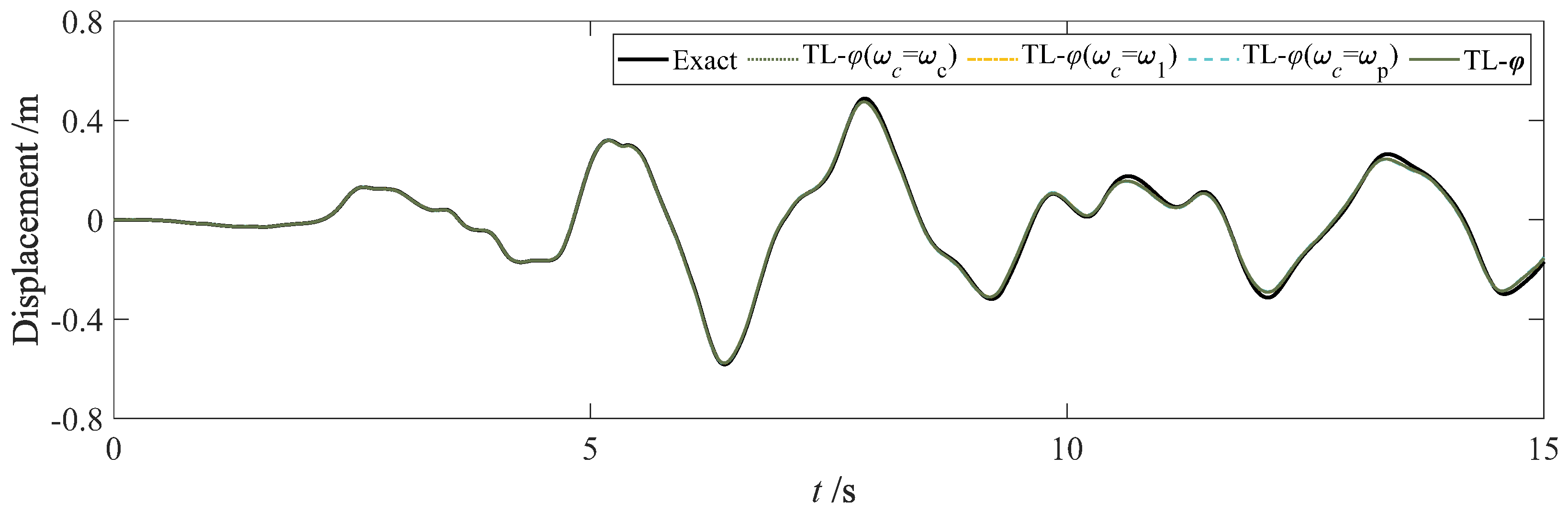
TL-
algorithms with
varying from 1 rad/s to 20 rad/s are applied to calculate NRMSE for each model. It is worth noting that the minimal NRMSE can be obtained when
for the case of
. For
, the optimal critical frequencies
and the arithmetic mean values
are acquired according to Equation (
15).
Table 4 lists the ratio of the mean values of
to
and
for each model.
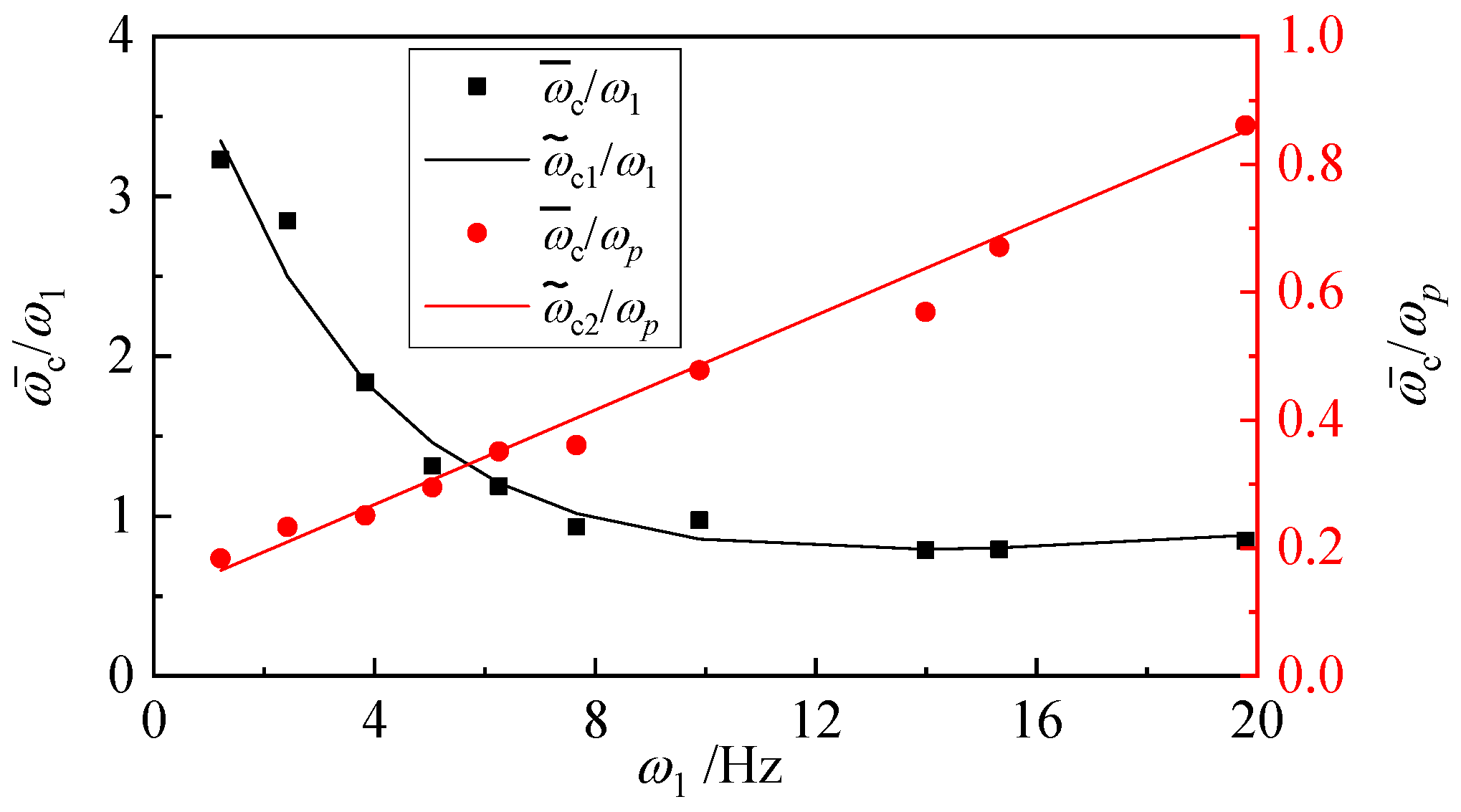
Figure 5 shows the scatter diagram of mean values varying with
, which indicates that
decays exponentially with an increasing of
, while
increases linearly with an increasing of
. The fitting formulas are also conducted based on the regression analysis as follows, and the
that equals to the smaller one of
and
is recommended in this situation.
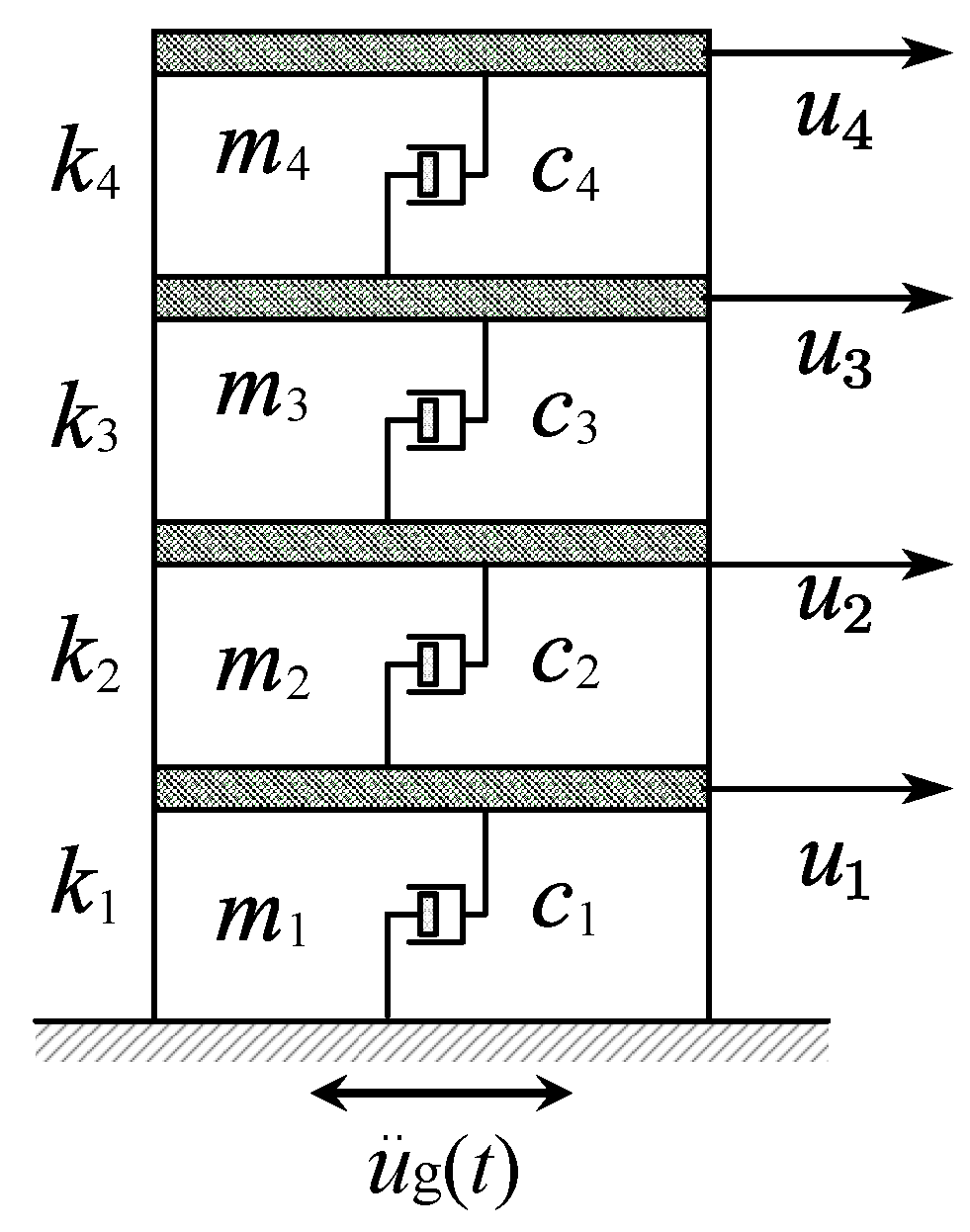
4.2. Modal Participation Factor, MPF
Another factor that rules the importance of any mode in the total dynamic response is MPF. In Equation (
6), the external force vector
can be expressed as a product of a distribution vector
and an amplitude vector
:
and for the particular case of seismic excitation, it has
where,
is a displacement transformation vector that expresses the displacement of each DOF excited by a unit static support displacement.
Introducing Equation (
24) or (
25) into Equation (
6), the equation of motion for each DOF becomes:
or
The ratios shown on the right side of Equations (
26) and (
27) are defined as the modal participation factor. That is,
It is apparent from Equation (
28) that the amplitude of the response due to any given mode depends on the interaction of the applied load distribution and the mode shape. An arbitrary external load distribution applied to an engineering structure might excite a response in any of the modes, and it is recommended that
equals to the frequency corresponding to the mode with the largest value of MPF. While for an engineering structure subjected to horizontal ground motion, the transformation vector
is a unit column, and the determination of
depends mainly on DMF.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}