

Confidentiality Preserved Federated Learning for Indoor Localization Using Wi-Fi Fingerprinting


Abstract
:1. Introduction
- (a)
- Wi-Fi positioning: By evaluating the signal intensity from surrounding access points, Wi-Fi signals can be utilized to determine a device’s position. This technique is based on a database of well-known Wi-Fi access points and the patterns of their signal intensity inside a structure.
- (b)
- Bluetooth: Indoor localization is possible with Bluetooth technology, especially Bluetooth Low Energy (BLE). It is feasible to determine a device’s location inside a constrained area by deploying Bluetooth beacons or using the signal strength from already-existing Bluetooth devices.
- (c)
- Ultra-wideband (UWB): UWB is gaining popularity for high-precision indoor localization applications due to its ability to provide accurate distance measurements.
- (d)
- RFID (radio-frequency identification): RFID is often used for asset tracking and indoor localization in specific scenarios where tagged objects or assets need to be monitored.
- (e)
- Zigbee: Zigbee is a low-power wireless communication technology commonly used in building automation and smart home systems, but it can also be utilized for indoor positioning.
- (f)
- Cellular network-based positioning: In some cases, cellular networks can provide rough estimates of indoor positions by leveraging signal strengths from nearby cell towers.
- (g)
- IR (Infrared) and ultrasonic signals: Infrared and ultrasonic signals are used in specialized applications, such as indoor localization for visually impaired individuals.
2. Literature Survey
3. Proposed Work
3.1. Federated Learning
3.2. Dataset Collection and Pre-Processing
3.3. Overall Methodology
- Each individual client in the N-client system was responsible for gathering the Wi-Fi fingerprinting data using its own resources. This information was then saved in each client’s individual storage system.
- On the sets of data that were provided, individual data cleansing and preprocessing operations were carried out by the Nclients.
- In the suggested client–server architecture, N-client edge nodes could access the already processed dataset for federated learning with predefined codes to classify.
- The federated learning process’s initial weights are likewise determined by the server.
- In a client–server architecture, the server distributed the initial weights among N consumers.
- Nclients, after obtaining the weights, began or simulated their own training and validation with their own readily available datasets.
- After the training phase was over, the weights of each client’s trained model were uploaded to the server.
- In this phase, the server calculated the federated average weights using the weights it had collected from all connected clients.
- The federated server determined the federated weights and sent them back to all of the connected clients after the computation.
- This study uses DNNs to classify buildings, floors, and locations, demonstrating advantages such as resistance to signal fluctuations, noise effects, and device dependence.
- It suggests a federated learning-based paradigm for classification.
- The proposed that f-ILC framework outperforms conventional distributed deep learning in multi-client settings and single-client situations.
- LSTM, CNN-LSTM, BiLSTM, and DenseNet are used to test the architecture on IID and non-IID datasets.
4. Experimental Results and Discussions
4.1. Simulation Set-Up
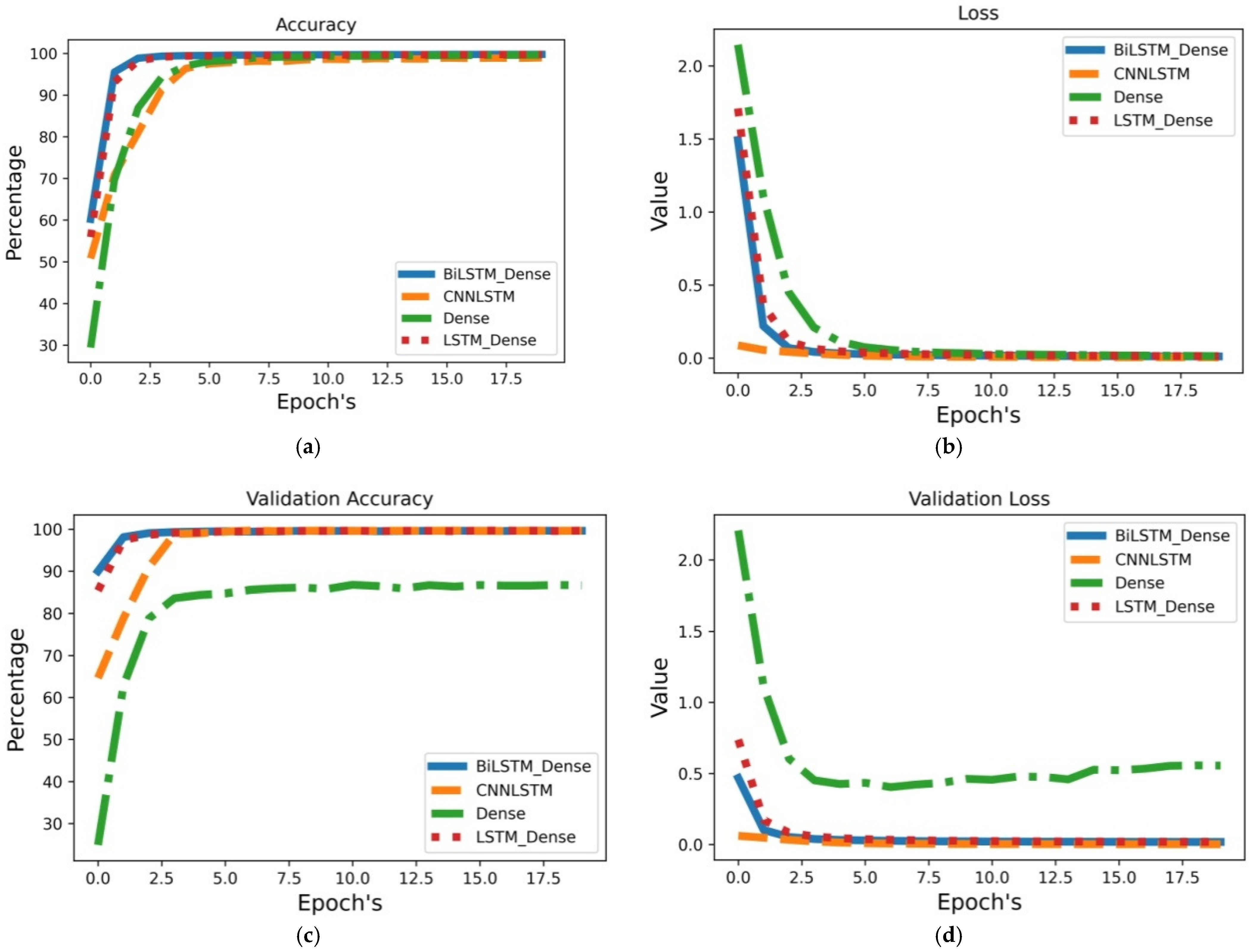
4.2. Indoor Localization Using Basic Deep Learning
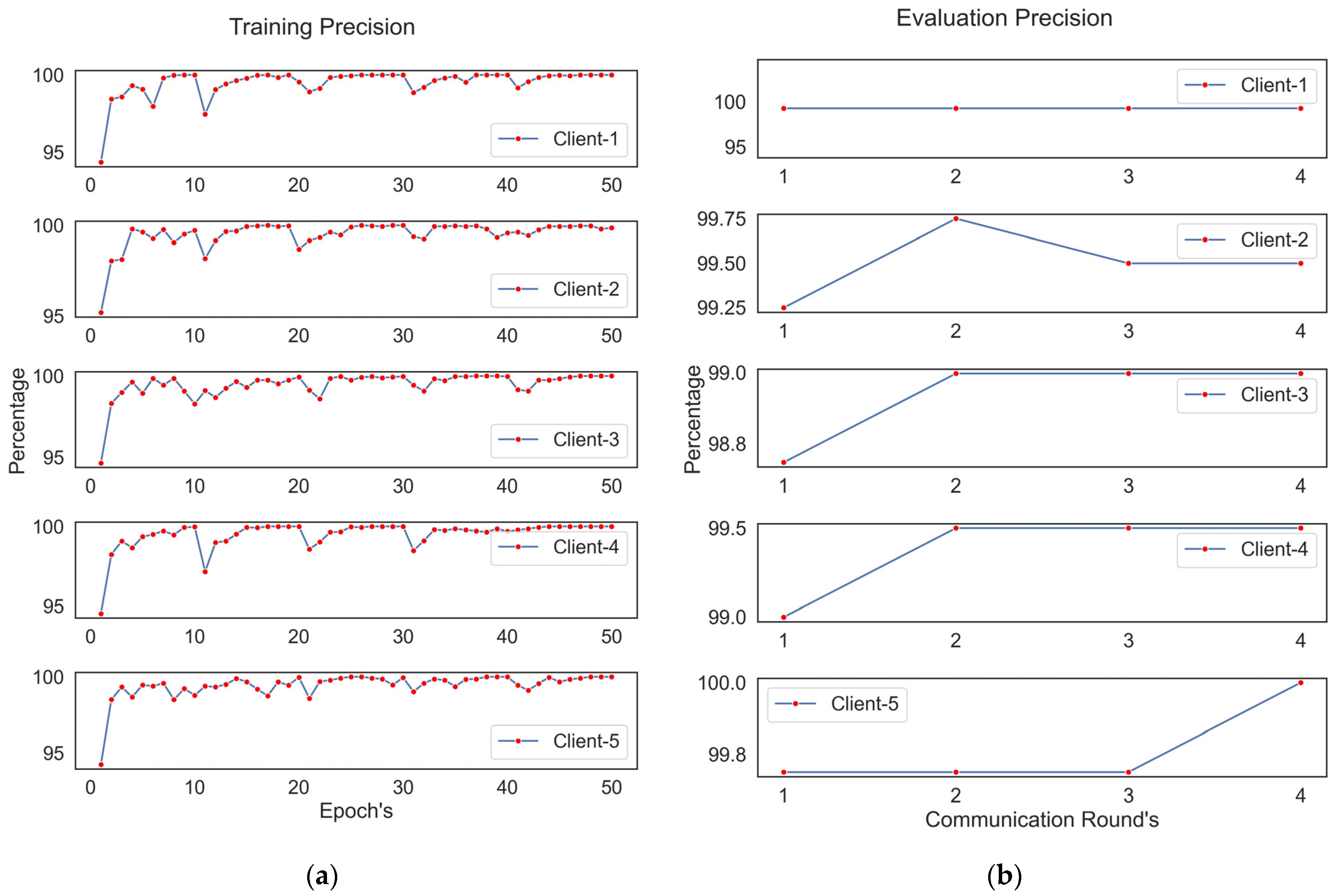
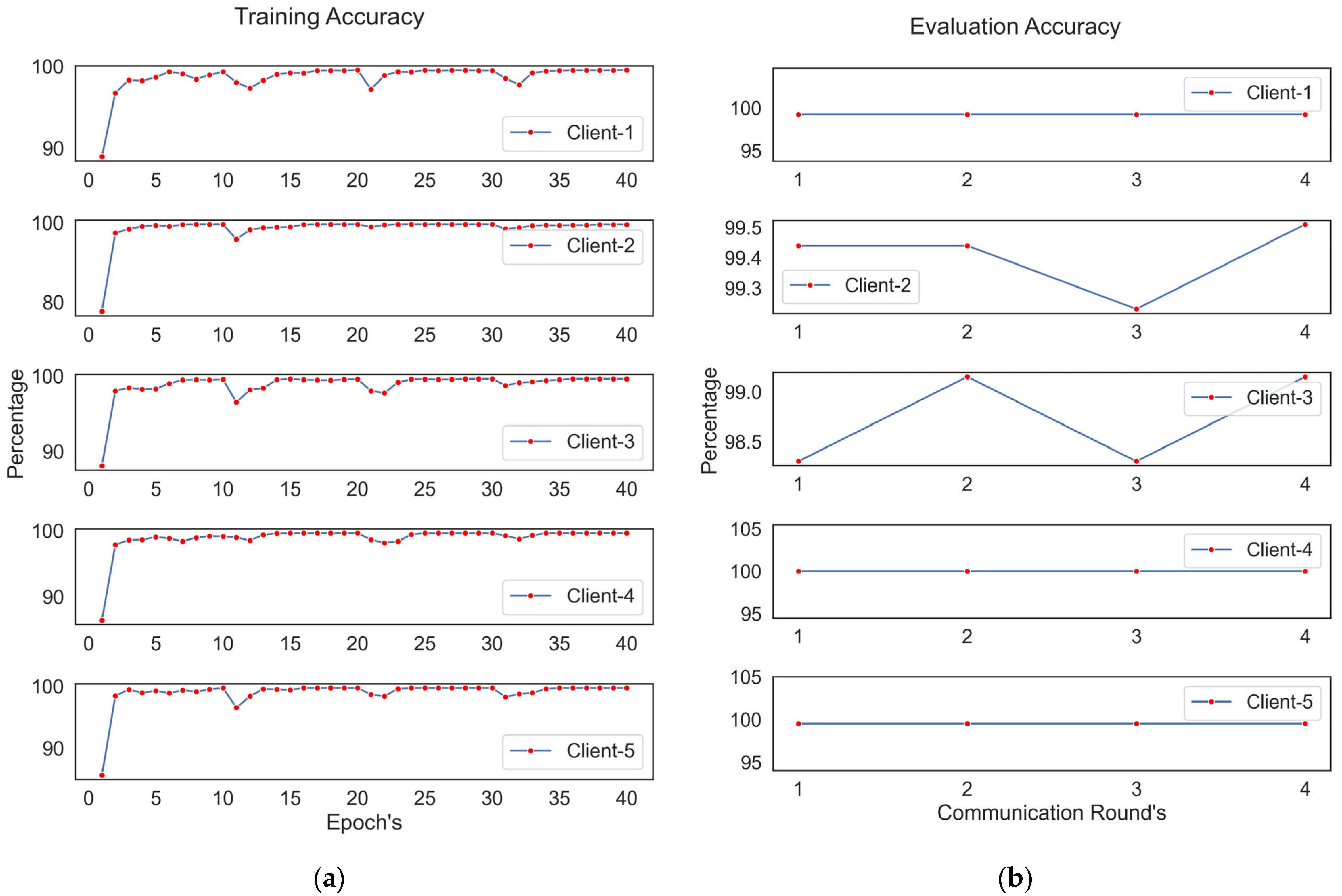
4.3. Indoor Localization Using Federated Learning
4.3.1. IID Database
- Independent, which loosely translates to “data generation is consistent”; as a result, for any class l and feature set S, P(S, l) = P(S).P(l), here . represents dot product.
- Identically distributed means that the client’s dataset (Di) follows the same probability distribution; as a result, P(l|D1) = P(l|D2)... = P(l|Dn) for any class y.
4.3.2. Non-IID Database
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dang, X.; Tang, X.; Hao, Z.; Liu, Y. A Device-Free Indoor Localization Method Using CSI. Sensors 2019, 19, 3233. [Google Scholar] [CrossRef] [Green Version]
- Huthaifa, O.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A review of indoor localization techniques and wireless technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Wu, X.; Long, Y. Multi-Level Federated Graph Learning and Self-Attention Based Personalized Wi-Fi Indoor Fingerprint Localization. IEEE Commun. Lett. 2022, 26, 1794–1798. [Google Scholar] [CrossRef]
- Kumar, A.; Sharma, S.; Goyal, N.; Singh, A.; Cheng, X.; Singh, P. Secure and energy-efficient smart building architecture with emerging technology IoT. Comput. Commun. 2021, 176, 207–217. [Google Scholar] [CrossRef]
- Jang, J.; Hong, S. Indoor Localization with Wi-Fi Fingerprinting Using Convolutional Neural Network. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 753–758. [Google Scholar]
- Alhomayani, F.; Mahoor, M.H. Deep learning methods for fingerprint-based indoor positioning: A review. J. Locat. Based Serv. 2020, 14, 129–200. [Google Scholar] [CrossRef]
- Bregar, K.; Mohorcic, M. Improving Indoor Localization Using Convolutional Neural Networks on Computationally Restricted Devices. IEEE Access 2018, 6, 17429–17441. [Google Scholar] [CrossRef]
- Dhiman, P.; Kukreja, V.; Manoharan, P.; Kaur, A.; Kamruzzaman, M.; Dhaou, I.B.; Iwendi, C. A novel deep learning model for detection of severity level of the disease in citrus fruits. Electronics 2022, 11, 495. [Google Scholar] [CrossRef]
- Zhou, M.; Member, S.; Long, Y.; Zhang, W.; Pu, Q. Adaptive Genetic Algorithm-Aided Neural Network with Channel State Information Tensor Decomposition for Indoor Localization. IEEE Trans. Evol. Comput. 2021, 25, 913–927. [Google Scholar] [CrossRef]
- He, S.; Member, S.; Chan, S.G.; Member, S. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- BelMannoubi, S.; Touati, H. Deep neural networks for indoor localization using WiFi fingerprints. In Proceedings of the Mobile, Secure, and Programmable Networking: 5th International Conference (MSPN 2019), Mohammedia, Morocco, 23–24 April 2019; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 247–258. [Google Scholar]
- Liu, K.; Tian, Z.; Li, Z.; Wang, J.; Zhou, M. HiLoc: Sub-Meter Level Indoor Localization Using a Single Access Point with Distributed Antennas in Wireless Sensor Networks. IEEE Sens. J. 2022, 22, 4869–4881. [Google Scholar] [CrossRef]
- Hsieh, C.; Chen, J.; Nien, B. Deep Learning-Based Indoor Localization Using Received Signal Strength and Channel State Information. IEEE Access 2019, 7, 33256–33267. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, X.; Zhang, H.; Tahir, N.; Fang, Z. A Structure Landmark-Based Radio Signal Mapping Approach for Sustainable Indoor Localization. Sustainability 2021, 13, 1183. [Google Scholar] [CrossRef]
- Yang, B.; Cao, X.; Huang, C.; Yuen, C.; Di Renzo, M. Federated Spectrum Learning for Reconfigurable Intelligent Surfaces-Aided Wireless Edge Networks. IEEE Trans. Wirel. Commun. 2022, 21, 9610–9626. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S.; Zhang, J.; Periaswamy, S.C.G.; Patton, J. Adversarial Deep Learning for Indoor Localization with Channel State Information Tensors. IEEE Internet Things J. 2022, 9, 18182–18194. [Google Scholar] [CrossRef]
- Li, T.; Wang, H.; Shao, Y.; Niu, Q. Channel state information-based multi-level fingerprinting for indoor localization with deep learning. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718806719. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.-S.; Tseng, P.-H. A Deep Neural Network-Based Indoor Positioning Method using Channel State Information. In Proceedings of the 2018 International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 5–8 March 2018; pp. 290–294. [Google Scholar] [CrossRef]
- Yang, R.; Yang, X.; Wang, J.; Zhou, M.; Tian, Z.; Li, L. Decimeter Level Indoor Localization Using Wi-Fi. IEEE Sens. J. 2022, 22, 4940–4950. [Google Scholar] [CrossRef]
- Chang, R.Y.; Liu, S.; Cheng, Y. Device-Free Indoor Localization Using Wi-Fi Channel State Information for Internet of Things. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Etiabi, Y.; Chafii, M.; Amhoud, E.M. Federated Distillation based Indoor Localization for IoT Networks. arXiv 2022, arXiv:2205.11440. [Google Scholar]
- Khullar, V.; Pal, H. f-FNC: Privacy concerned efficient federated approach for fake news classification. Inf. Sci. 2023, 639, 119017. [Google Scholar] [CrossRef]
- Nilsson, A.; Smith, S.; Ulm, G.; Gustavsson, E.; Jirstrand, M. A performance evaluation of federated learning algorithms. In Proceedings of the Second Workshop on Distributed Infrastructures for Deep Learning (DIDL), Rennes, France, 10–11 December 2018; pp. 1–8. [Google Scholar]
- Ghimire, B.; Member, G.S.; Rawat, D.B.; Member, S. Recent Advances on Federated Learning for Cybersecurity and Cybersecurity for Federated Learning for Internet of Things. IEEE Internet Things J. 2022, 9, 8229–8249. [Google Scholar] [CrossRef]
- Kim, K.; Lee, S.; Huang, K. A scalable deep neural network architecture for multi-building and multi-floor indoor localization based on Wi-Fi fingerprinting. Big Data Anal. 2018, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Cesana, M.; Maniezzo, D.; Bergamo, P.; Gerla, M. Interference aware (IA) MAC: An enhancement to IEEE802. 11b DCF. In Proceedings of the 2003 IEEE 58th Vehicular Technology Conference, VTC 2003-Fall (IEEE Cat. No. 03CH37484), Orlando, FL, USA, 6–9 October 2003; Volume 5, pp. 2799–2803. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Gao, L.; Mao, S. PhaseFi: Phase Fingerprinting for Indoor Localization with a Deep Learning Approach. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep learning for indoor fingerprinting using channel state information. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1666–1671. [Google Scholar] [CrossRef]
- Arafeh, M.; Hammoud, A.; Otrok, H.; Mourad, A.; Talhi, C.; Dziong, Z. Independent and Identically Distributed (IID) Data Assessment in Federated Learning. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 293–298. [Google Scholar] [CrossRef]
- Jeong, M.; Won, S.; Kim, S. A tutorial on Federated Learning methodology for indoor localization with non-IID fingerprint databases. ICT Express, 2023, in press. [CrossRef]
- Zhu, H.; Xu, J.; Liu, S.; Jin, Y. Federated Learning on Non-IID Data: A Survey. Neurocomputing 2021, 465, 371–390. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter/Model | Value |
|---|---|
| Date of standard approval | July 1999 |
| Maximum data rate (Mbps) | 11 |
| Typical data rate (Mbps) | 5 |
| Typical range indoors (Metres) | ~30 |
| Modulation | CCK (DSSS) |
| RF band (GHz) | 2.4 |
| Channel width (MHz) | 20 |
| Simulation Configurations/Steps | Related Data/Source |
|---|---|
| Software configurations | Python version 3.11.4 Tensorflowfederated Keras 2.11.0 Tensorflow version 2.13.0 |
| System configuration (server side) | 1 server I7 processor 16GB RAM NVIDIA 1650 4 GB Dedicated Graphics Memory |
| System configuration (Client side) | No of clients:5 I5 processor 8GB RAM NVIDIA 1650 4 GB Dedicated Graphics Memory |
| Data collection and preprocessing | Refer to Section 3.2 |
| Benchmark single system analysis | Refer to Section 4.2 |
| Data distributed according to clients as per IID and Non IID. | Refer to Section 4.3.1 and Section 4.3.2 |
| Analysis on federated ecosystem | Refer to Section 4.3 |
| Parameter/Model | BiLSTM_Dense | CNNLSTM | Dense | LSTM_Dense |
|---|---|---|---|---|
| Accuracy | 99.78 | 98.97 | 99.64 | 99.78 |
| Validation Accuracy | 99.65 | 99.65 | 86.75 | 99.65 |
| Loss | 0.01 | 0.01 | 0.01 | 0.01 |
| Validation Loss | 0.02 | 0.00 | 0.40 | 0.02 |
| Train/Validation | Data | Accuracy | Loss | Precision | Recall |
|---|---|---|---|---|---|
| Training | IID | 99.5 | 0.02 | 99.45 | 99.085 |
| Training | Non-IID | 99.57 | 0.01 | 99.55 | 99.85 |
| Validation | IID | 99.61 | 0.01 | 99.99 | 99.61 |
| Validation | Non-IID | 99.62 | 0.01 | 100 | 99.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, R.; Popli, R.; Khullar, V.; Kansal, I.; Sharma, A. Confidentiality Preserved Federated Learning for Indoor Localization Using Wi-Fi Fingerprinting. Buildings 2023, 13, 2048. https://doi.org/10.3390/buildings13082048
Kumar R, Popli R, Khullar V, Kansal I, Sharma A. Confidentiality Preserved Federated Learning for Indoor Localization Using Wi-Fi Fingerprinting. Buildings. 2023; 13(8):2048. https://doi.org/10.3390/buildings13082048
Chicago/Turabian StyleKumar, Rajeev, Renu Popli, Vikas Khullar, Isha Kansal, and Ashutosh Sharma. 2023. "Confidentiality Preserved Federated Learning for Indoor Localization Using Wi-Fi Fingerprinting" Buildings 13, no. 8: 2048. https://doi.org/10.3390/buildings13082048
APA StyleKumar, R., Popli, R., Khullar, V., Kansal, I., & Sharma, A. (2023). Confidentiality Preserved Federated Learning for Indoor Localization Using Wi-Fi Fingerprinting. Buildings, 13(8), 2048. https://doi.org/10.3390/buildings13082048