1. Introduction
Welded spatial grid structures are extensively utilized in civil engineering, particularly in densely populated public areas like exhibition halls, stadiums, and theaters, which often serve as prominent architectural landmarks in cities. The occurrence of engineering accidents in these structures can result in significant economic losses and have severe social implications. Among the various components of welded grid structures, welded hollow spherical joints are particularly prone to damage due to the complex multi-directional loading conditions they experience. Moreover, Adin analyzed the mechanical properties of welded joints produced by different welding methods and pointed out that the welding methods have great influence on the mechanical properties of welded joints [
1]. Wu et al., indicated that due to the welding process and environmental influences, the welding zone tended to lead to stress concentration, making the welded joints vulnerable locations for structural damage [
2]. Therefore, it is essential to accurately identify any damage that may occur in these joints to ensure the safety of such structures in service.
The dynamic responses of engineering structures often contain valuable information that can provide insights into their working performance and condition. Analyzing the dynamic response enables us to understand dynamic characteristics and assess structural integrity to a certain extent. Several studies have focused on structural damage identification based on modal parameters extracted from dynamic response. Wei et al., conducted a comprehensive review of methods for damage identification in beams or plates, considering modal parameters such as natural frequencies, modal shapes, curved modal shapes, and a combination of modal shapes and frequencies [
3]. Similarly, Zhu et al., developed an effective damage detection method for shear wall structures by analyzing variations in first-mode amplitudes [
4]. Yin et al., proposed a practical method for detecting damage in bolted joints using noisy incomplete modal parameters by only limited data acquisition, and demonstrated the effectiveness of the combination of numerical simulations and experimental validations [
5]. Ditommaso et al., proposed a methodology for damage localization in frame structures subjected to strong ground motion through monitoring modal curvature variations [
6]. Zhang et al., introduced a displacement modal shape processing method based on difference accumulation, which was used as a damage characterization parameter to detect damage in composite materials [
7]. Zhou et al., investigated modal flexibility extraction and damage identification using multi-reference hammering in reinforced concrete (RC) beams, and performed static and dynamic experiments on simply supported RC beams to validate this method [
8]. Chang et al., demonstrated the effectiveness of modal parameter identification and vibration-based damage detection through field experiments on a simply supported steel truss bridge [
9]. Fang et al., employed a substructure-based damage identification method utilizing the acceleration frequency response function (FRF) to identify damage in a six-story steel frame structure [
10]. These studies highlight the significance and potential of using dynamic response analysis for structural damage identification. However, as the complexity of the structure increases, the sensitivity of damage identification methods that rely on changes in structural dynamic characteristics as damage indicators becomes less robust. This makes it difficult to apply these damage identification methods to practical structures.
The modal strain energy (MSE), derived from the structural modal shape and stiffness matrix, has been recognized as a sensitive physical property that undergoes changes before and after structural damage. As a result, several damage identification methods utilize modal strain energy as a damage indicator in structural health monitoring. Cha et al., proposed a novel damage detection method that employed a hybrid multi-objective optimization algorithm based on MSE to detect damages in various three-dimensional steel structures [
11]. Li et al., developed an improved modal strain energy (IMSE) method for detecting damage in offshore platform structures, utilizing modal frequencies as the basis for the approach. Numerical and experimental studies both demonstrated the effectiveness and practicality of the IMSE method [
12]. Arefi et al., employed MSE and modal shapes reconstructed by the Guyan reduction method (GRM) as damage indices for identifying structural damage [
13]. Huang et al., addressed computational efficiency and the lack of high-sensitivity damage indices in structural damage identification by proposing a framework based on the modal frequency strain energy assurance criterion (MFSEAC), modal flexibility, and an enhanced moth–flame optimization algorithm [
14]. These studies highlight the significance of modal strain energy as a valuable parameter for structural damage identification based on dynamic characteristics. However, when the scale of the structure increases, the high dimensionality of the stiffness matrix and the truncation effects of modal shapes lead to a decrease in the ability of modal strain energy to characterize structural damage, potentially resulting in the inability to detect structural damage.
Spatial grid structures, with their complex shapes and large scale, exhibit complex stiffness characteristics, resulting in a dense distribution of natural frequencies. In the case of damage to multiple members within the structure, even complete loss of their bearing capacity, the resulting changes in modal parameters, such as natural frequencies, tend to be minimal. Consequently, damage indicator methods relying solely on the magnitude of modal parameter changes are often inadequate for diagnosing damage in these structures. To overcome this limitation, damage identification methods based on direct structural response information have been proposed. Sohn et al., utilized time series methods to identify structural damage by analyzing the dynamic response of the structure [
15]. Lam et al., developed a Bayesian method to assess the damage status of railway ballast under a concrete sleeper using vibration data from in situ sleepers [
16]. Salehi et al., introduced a novel structural damage detection technique based on multi-channel empirical mode decomposition (MEMD) of vibrational response data [
17]. Zhu et al., used a combination of statistical regression and deep learning methods to predict the deformation of a dam based on multiple measuring points in different sections of the dam [
18]. Xiao et al., proposed a methodology for identifying damage in semi-rigid frames with slender beams, which was applied on semi-rigid frame structures with different cross-sectional shapes by formulating an objective function based on minimizing the difference between the analyzed and measured joint displacements [
19]. However, the practical application of these methods to grid structures is often hindered by the large-scale nature of the structures and the significant number of connections and members involved. Consequently, the installation of a large number of sensors on the structure to obtain the required response information for identifying damaged spherical weld joints becomes challenging and restricts the feasibility of such approaches in grid structures.
Xiao et al., proposed a stiffness separation method for damage identification in large-scale space truss structures that simplified the high-dimensional structural damage identification problem [
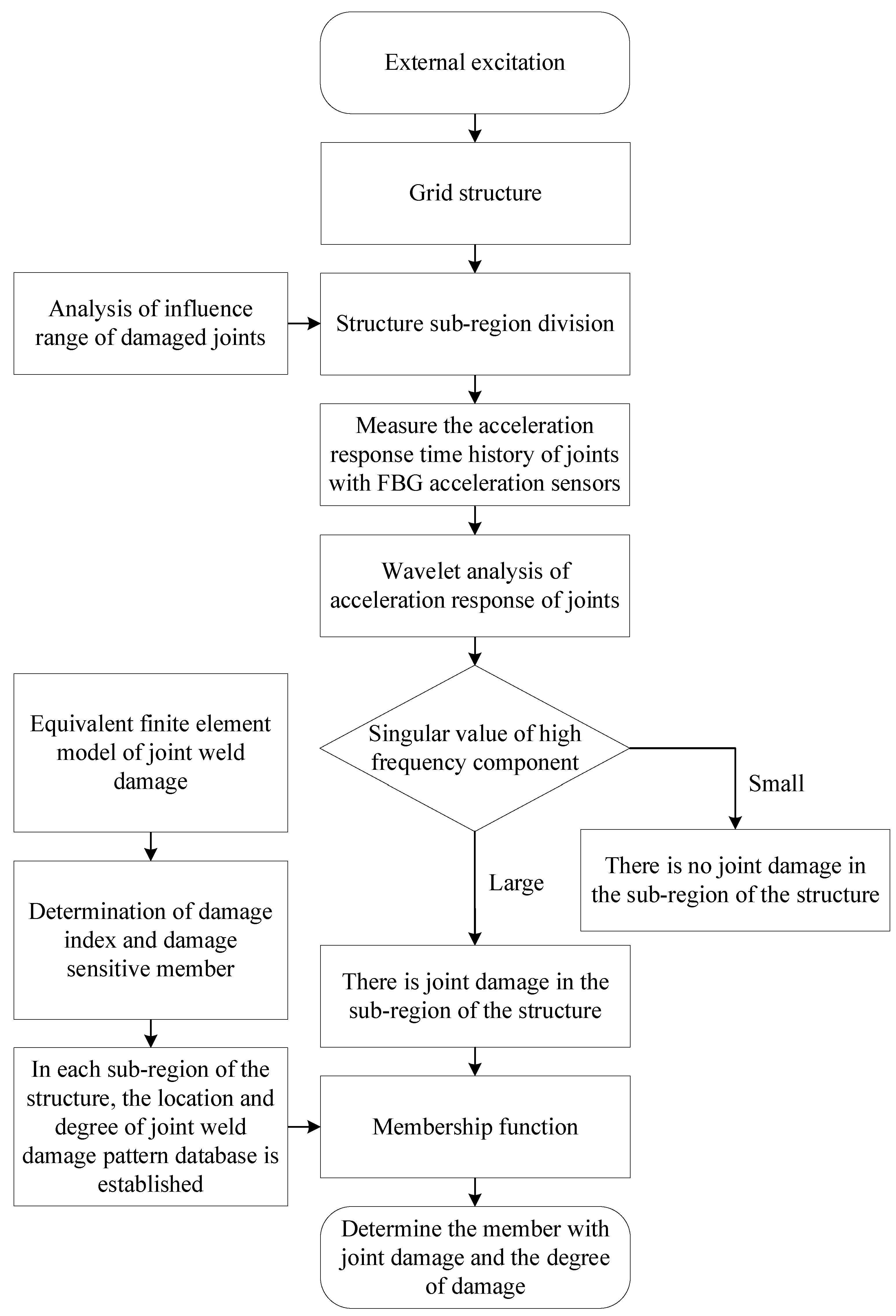
20]. Therefore, dividing the grid structure into several simpler substructures provides a practical method for identifying joint damage within each substructure, which is analogous to dimensionality reduction processing. This concept forms the basis for the development of the two-step method presented in this paper, specially designed to identify weld damage in the welded joints of grid structures. The first step involves partitioning the grid structure into sub-regions and utilizing data acquired from a limited number of measurement key joints to identify the sub-regions where joint weld damage has occurred. In the second step, the focus is on recognizing the precise location and extent of joint weld damage within the identified sub-regions. The key to implementing the two-step approach for identifying weld damage at the joints of grid structures lies in the selection of appropriate identification methods for each step. These identification methods should meet criteria such as requiring minimal information, while also ensuring high accuracy and ease of implementation.
Wavelet analysis has gained attention in the field of structural damage detection due to its ability to capture local characteristics of signals in both time and frequency domains, leading to significant achievements. Kim et al., utilized continuous and discrete wavelet transforms in structural health monitoring (SHM) to investigate damage identification in beam structures [
21]. Zhe F. et al., introduced a novel transmissibility concept based on wavelet transform to detect slight structural damage at its early stage [
22]. Janeliukstis et al., employed a two-dimensional wavelet transform algorithm with isotropic Pet Hat wavelet to locate areas of damage in a numerically simulated aluminum plate model, finding that the lowest scale of the selected wavelet function yielded the best results for damage identification [
23]. Zhu et al., proposed a new damage index for crack identification in functionally graded material (FGM) beams using wavelet analysis, defining the index based on the position of the maximum value of the wavelet coefficient modulus in the scale space [
24]. Katunin et al., presented a novel damage identification approach using the 2D continuous wavelet transform-based algorithm to analyze differences in modal rotation fields obtained from shearographic measurements of structures [
25]. Yazdanpanah et al., proposed an efficient wavelet-based refined damage-sensitive feature for nonlinear damage diagnosis in steel moment resisting frames (MRFs), which utilized acceleration responses extracted from the structures analyzed by incremental dynamic analysis (IDA) under various ground motion records [
26]. Zhu et al., used the variational mode decomposition (VMD) wavelet packet denoising method to denoise the prototypical seepage pressure data of dams, and it was demonstrated through experiments that the method achieved high prediction accuracy and flexibility [
27].
However, directly applying wavelet analysis to identify joint damage in grid structures may lead to incorrect results due to the complexity and symmetry of the structure. The presence of joint damage in the grid structure can cause significant response changes, especially at symmetrical locations. To overcome this challenge, partitioning the grid structure becomes essential as it effectively reduces complexity and breaks symmetry, rendering wavelet analysis advantageous for damage identification in sub-regions of the structure.
Furthermore, damage to a joint can result in amplitude changes in the singular values of the wavelet-transformed acceleration response of adjacent joints. Therefore, the wavelet analysis method can be employed not only for damage identification but also to determine the influence range of a damaged joint by analyzing the amplitude changes in the singular values of the wavelet transform of adjacent joints. This additional feature enhances the capabilities of the wavelet analysis method for accurately detecting and localizing joint damage within the grid structure.
Fuzzy pattern recognition, a method that involves extracting identification indicators and establishing membership functions, has been widely employed in structural damage identification. Wang et al., proposed a two-stage fuzzy pattern identification method based on fuzzy theory to establish a fuzzy pattern database for cable force, key point strain, and weld crack growth length. This method enabled the identification of earplate crack length in guyed mast structures under wind load [
28]. Ren et al., extracted damage-sensitive features through statistical analysis of time history response data, forming statistical mode vectors that characterize the structural status. By comparing the distances between mode vectors in the feature set for different structural conditions, they were able to determine the damage [
29]. Jiang et al., proposed a data fusion damage identification method based on fuzzy neural networks, which effectively utilized redundant and uncertain information for more accurate damage diagnosis [
30].
However, extracting damage indices becomes challenging in grid structures with numerous joints and members. Moreover, pattern matching in a large pattern database based on established membership functions requires extensive analysis, which may result in low recognition accuracy or errors due to the complexity of the grid structure. Nevertheless, the implementation of the fuzzy pattern recognition method in sub-regions of the structure where joint damage has been identified presents a practical solution, which can significantly reduce the difficulty of identifying the location and extent of joint damage. By focusing pattern matching solely on the sub-region containing joint damage, the computational burden is substantially reduced, and potential identification errors caused by the complexity of the grid structure are effectively avoided.
Therefore, it is recommended to combine the wavelet analysis method in the first step and the fuzzy pattern recognition method in the second step to achieve joint weld damage identification in grid structures. In this way, the objective of the study was attained through the selective placement of acceleration sensors on key joints within the structural sub-region. By subjecting the response time histories collected from these sensors to wavelet analysis, the presence of joint damage within the sub-region can be identified. Subsequently, using this outcome, fuzzy pattern recognition can be applied specifically to the sub-region where the damage has been detected, allowing the determination of the location and severity of the joint damage. Furthermore, to validate the effectiveness of the proposed method, a physical grid structure model was fabricated and subjected to testing. The results of these experiments demonstrate that the proposed method can accurately identify the location and degree of damage in the structural joints. Importantly, this method requires minimal measurement information, making it practical and feasible for implementation in practical engineering applications.
3. Damage Identification of Weld Joints in Spatial Grid Structure
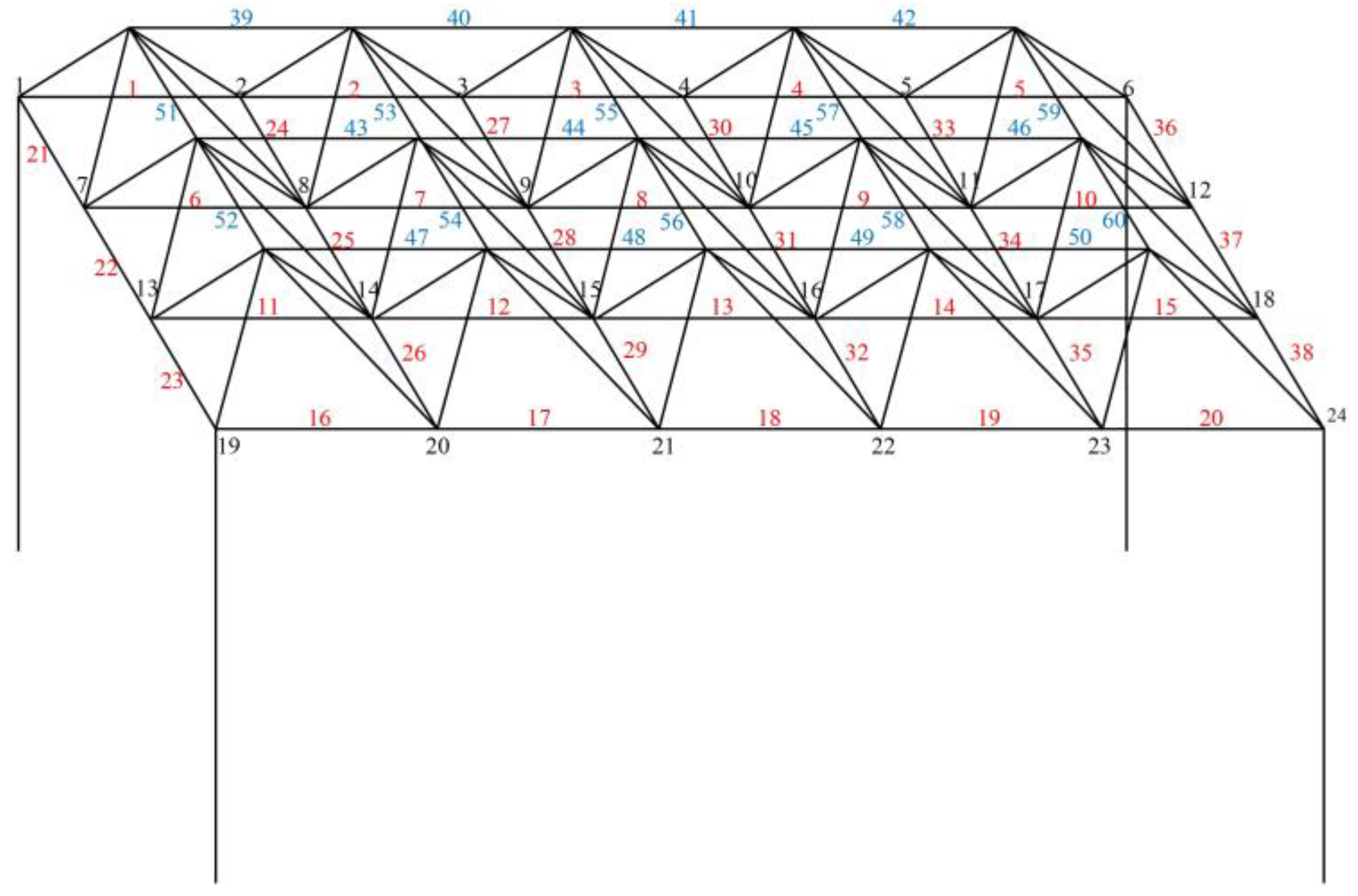
To investigate the applicability of the two-step method for identifying weld crack damage to joints, a welded space steel structure model was developed, as shown in
Figure 6 (the numbers of the upper and lower chords are marked), which was used in the numerical analysis and experimental verification. Due to space limitation in the laboratory, the model dimensions were set to 3 m in length, 1.8 m in width, and 1.85 m in height. The overall height of 1.85 m was composed of a 1.5 m pillar and 0.35 m corresponding to the upper and lower chords of the grid structure. The hollow spheres utilized in the model were of WS1204 specification.
The grid structure consisted of lower chords with a grid pattern of 5 × 3 and upper chords with a grid pattern of 4 × 2. All members in the structure were of type ϕ48 × 3.5, with an outer diameter of 48 mm and a wall thickness of 3.5 mm. The structure was supported at all four corners by the pillars, constructed using circular steel tubes of type ϕ60 × 3.5, with a net height of 1.5 m. The steel material in the structure had an elastic modulus of 206 GPa, Poisson’s ratio of 0.3, and a density of 7850 kg/m3.
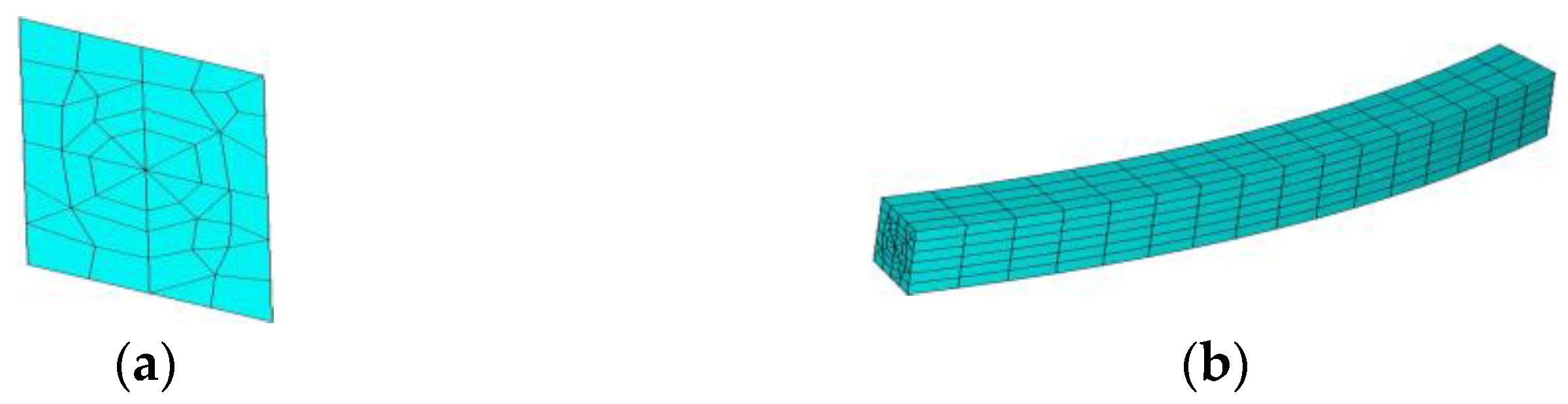
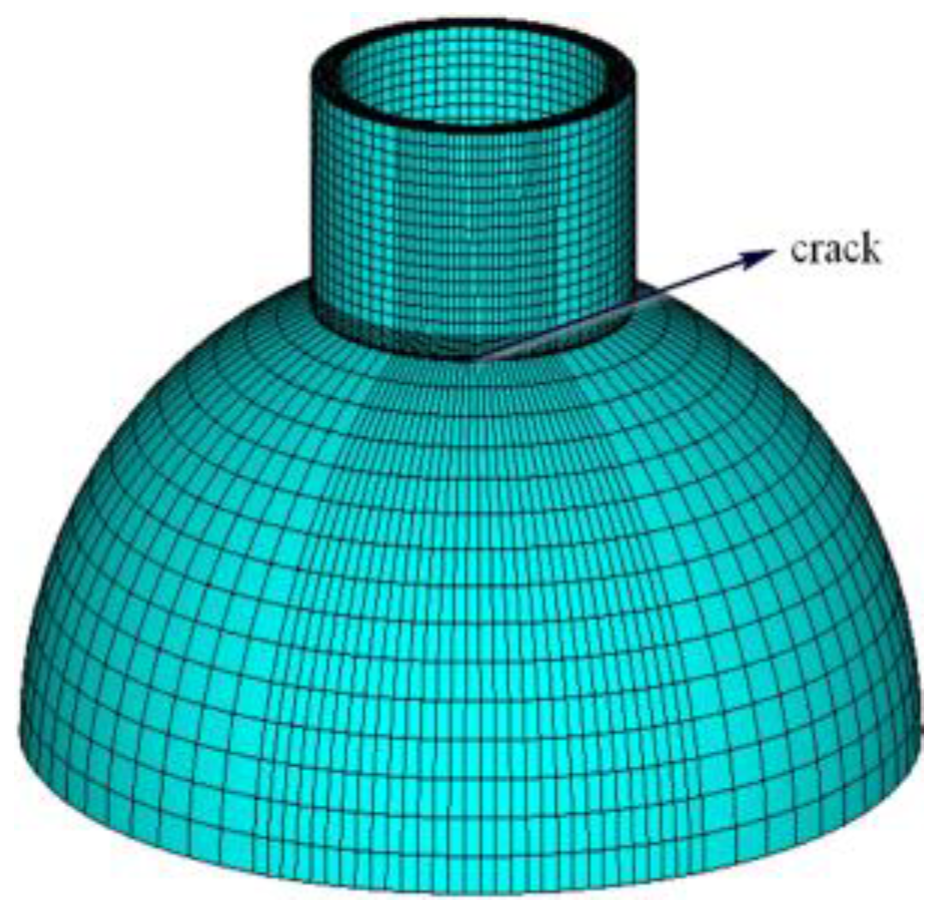
The finite element model of the structure was created using the ANSYS (v. 12.0.) finite element analysis software. The member elements were simulated using the element type BEAM188. The mass of the spherical joints was represented by the MASS21. The welded spherical joints with cracks were simulated by the MATRIX27. The finite element model consisted of 43 nodes and 124 elements.
3.1. Damage Identification Sub-Region Division of Spatial Grid Structure
When weld damage occurs at a joint in the grid structure, it can lead to changes in the acceleration responses of this joint as well as the adjacent joints when subjected to external excitation. By performing wavelet transform on these acceleration responses, the singular values of the high-frequency components can be obtained. These singular values help determine the influence range of the damaged joint and guide the placement of sensors at specific locations within the structure.
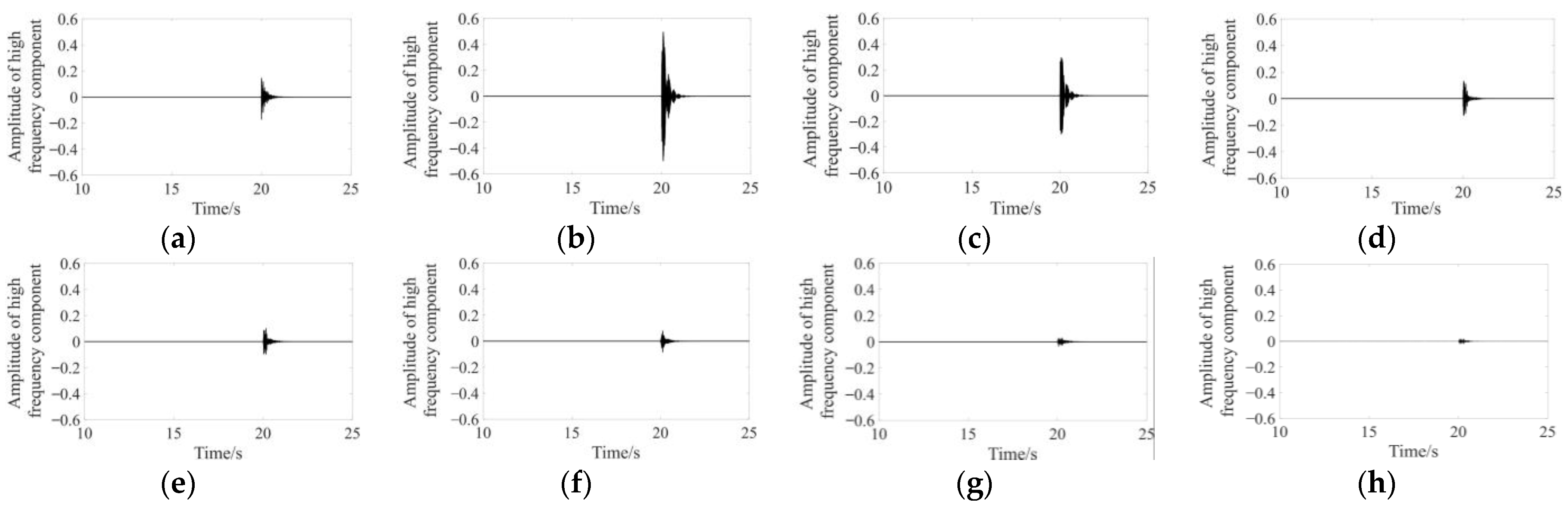
In the analysis, joint 8 was chosen as an example. When a 90° weld damage occurred on the right side of joint 8, the singular values of the high-frequency components in the acceleration responses of joint 8 and its neighboring joints were examined using wavelet transform. The magnitude of these singular values was used to determine the range of influence caused by the weld damage.
To initiate the free vibration of the grid structure, a horizontal displacement of 2 cm was applied. At 20 s, the weld damage occurred on the right side of joint 8. The time–history acceleration responses of all joints in the structure were then calculated. Subsequently, the wavelet transform was performed on the acceleration response of each joint to obtain the singular value of the high-frequency component.
Figure 7 illustrates the singular values of the high-frequency components for the lower chord joints 7, 8, 9, 10, and the upper chord joints 25, 31, 36, 37.
From
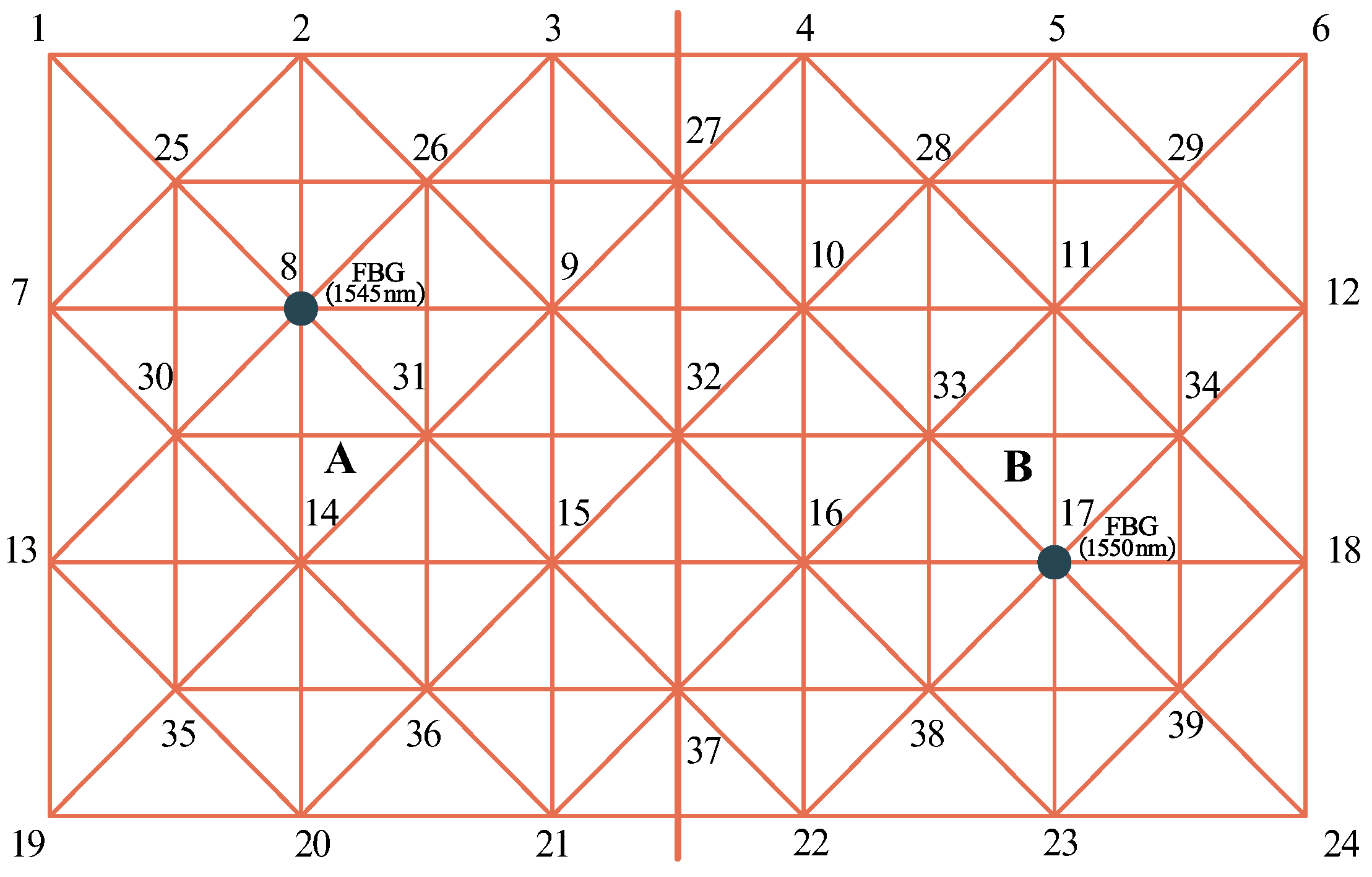
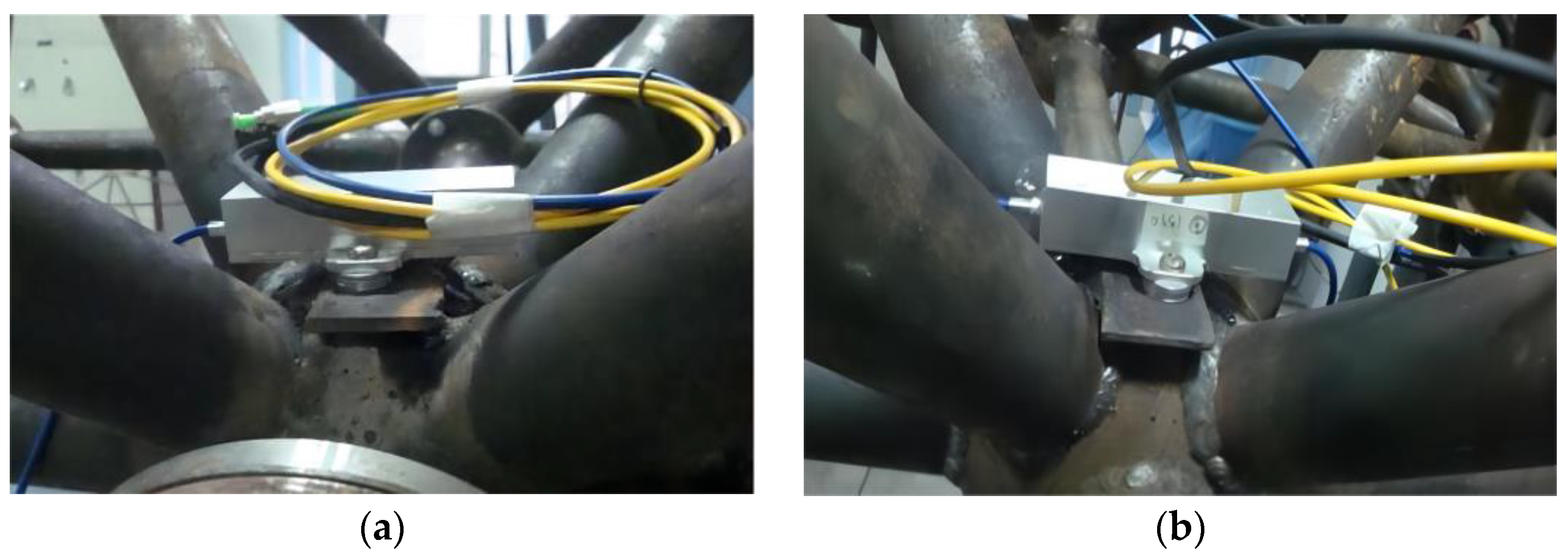
Figure 7, it is evident that when joint 8 is damaged, its acceleration response exhibits the highest singular value for the high-frequency component. As the distance from joint 8 increases, the singular values of the high-frequency components for the lower chord joints gradually decrease, indicating a diminishing influence caused by the damage of joint 8 with increasing distance. The distribution of singular values for the high-frequency components in the upper chord joints follows a similar pattern, and with a sufficient distance, the influence caused by joint 8 damage becomes negligible. By comparing the maximum singular value of the high-frequency component for each joint to that of joint 8, structural sub-regions can be identified, and the locations for sensor placement can be determined. In this case, the maximum singular value at joint 37 is significantly smaller than that at joint 8. Therefore, considering joint 37 as the boundary, the damage influence range of an individual joint is defined as a rectangle measuring 1.5 m × 1.8 m in the lower chord and a square measuring 1.2 m × 1.2 m in the upper chord. Consequently, the grid structure is divided into two sub-regions, labeled as A and B. An FBG accelerometer was mounted on joint 8 of sub-region A and joint 17 of sub-region B, as depicted in
Figure 8.
3.2. Formation of Damage Recognition Pattern Database
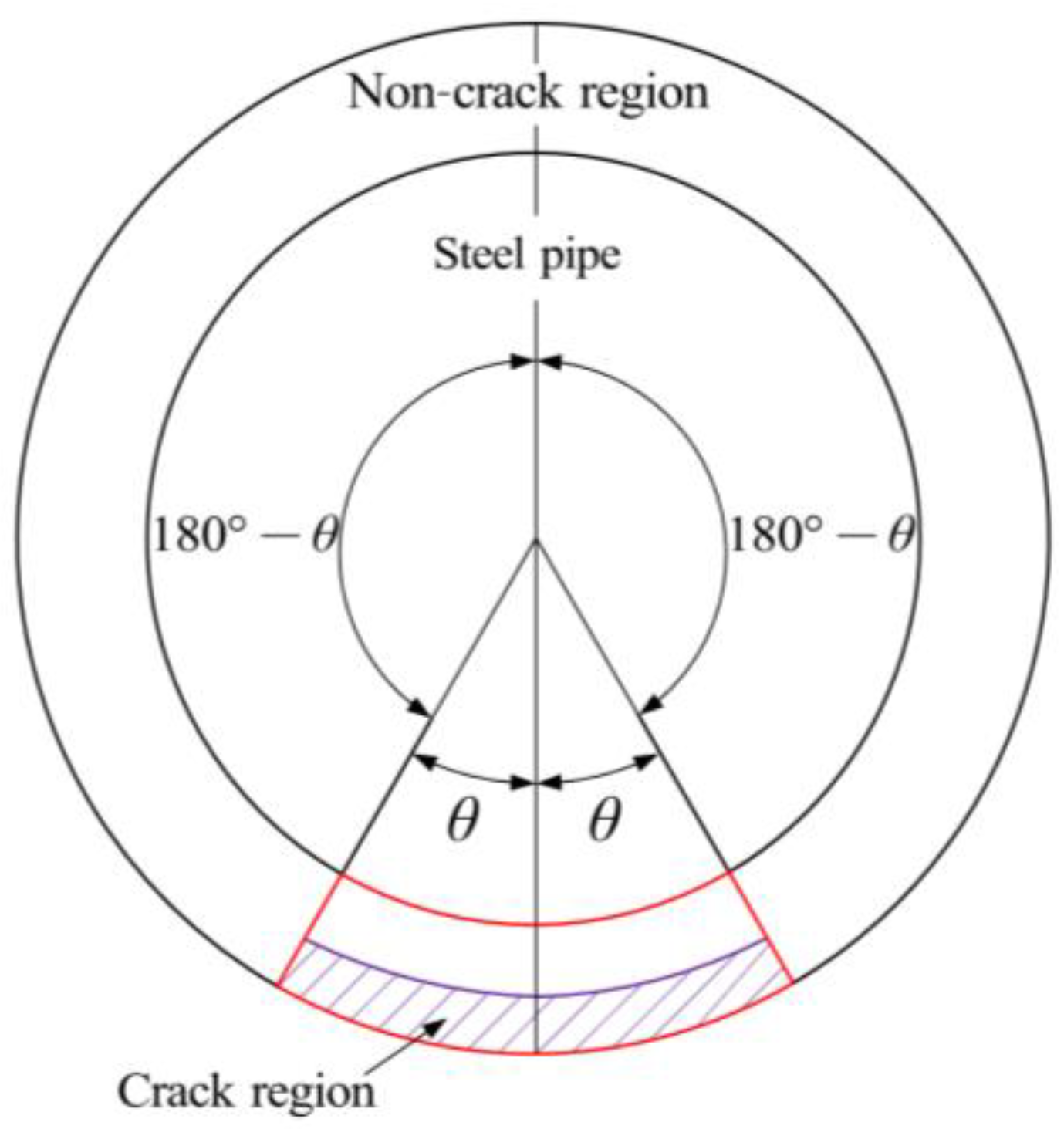
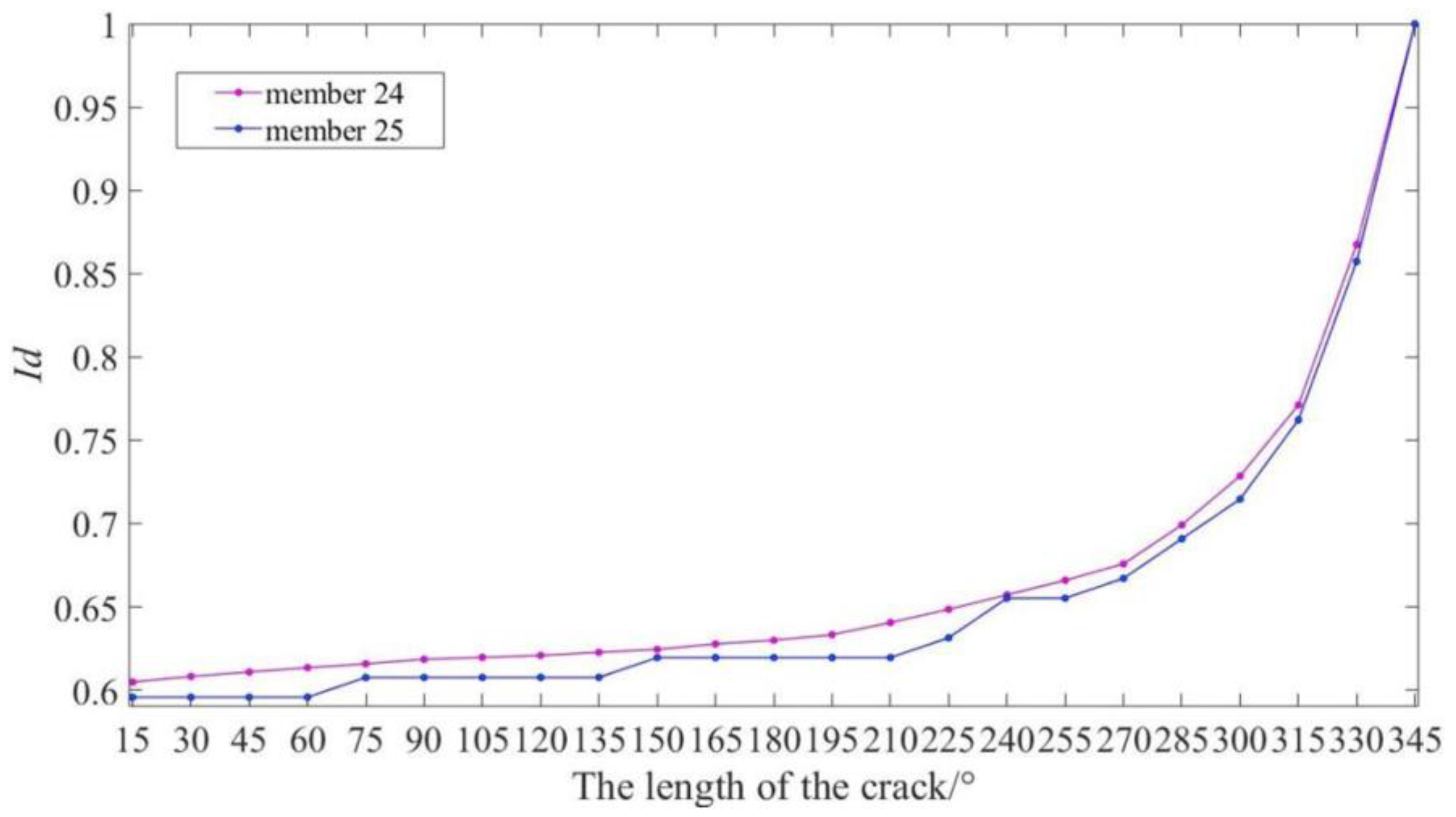
The formation of an appropriate pattern database is crucial for diagnosing structural damage using the fuzzy pattern recognition method. To illustrate the process, the damage to joint 2 in the No. 24 member was taken as an example. In this case, the crack length range was assumed to be between and (where r was the outer radius of the tube), with an interval of 15πr/180. Consequently, there were a total of 23 damage patterns for each weld damage scenario at joint 2.
Figure 9 displays the relationships between the
Id values of the No. 24 and No. 25 members and the damage extent of joint 2. As the damage of joint 2 aggravated, the
Id value of the No. 24 member connected to joint 2 exhibited the most significant change, while the
Id value of the adjacent No. 25 member also experienced a noticeable change. Both
Id values gradually increased with the aggravation of the damage to joint 2. Consequently, these sensitive members’
Id values were selected as eigenvectors to effectively characterize this particular damage pattern.
Following a similar approach, the damage patterns for all joints corresponding to members were determined. In each sub-region, there were 60 pattern libraries, with each pattern library containing 23 damage patterns.
Then, a sinusoidal load close to the natural frequency of the structure was applied to induce forced vibrations. The displacement response of the structure during steady-state vibration was selected for analysis, allowing the determination of the strain mode of each member in the structure. In the sub-region where joint damage occurred, the strain mode of each member was compared with that observed during the 345° weld damage of the connecting joint, resulting in the acquisition of the Id for each member in the sub-region.
Subsequently, the membership degree between the eigenvectors representing each pattern library and the corresponding Id vectors of members in the damaged sub-region was calculated. The pattern associated with the highest membership degree represented the location and degree of the joint weld damage. To enhance accuracy, multiple peak displacement responses were selected to calculate the Id for each member, and the average value was employed for fuzzy pattern recognition.
3.3. Experimental Model and Sensor Placement for Grid Structures
In the aforementioned model, the members utilized were circular steel pipes with dimensions of ϕ48 × 3.5. The four pillars were constructed using ϕ60 × 3.5 circular steel pipes, which were welded onto 10mm thick steel plates measuring 0.5 m × 0.5 m. These steel plates were securely fastened to the concrete platform using high-strength bolts forming fixed supports. The upper ends of each pillar were connected to the upper grid via flanges. Each flange was fastened using six outer hexagon bolts with a diameter of 6 mm. The grid structure model was made by Q235; the yield strength of steel is 235 Mpa, as illustrated in
Figure 10.
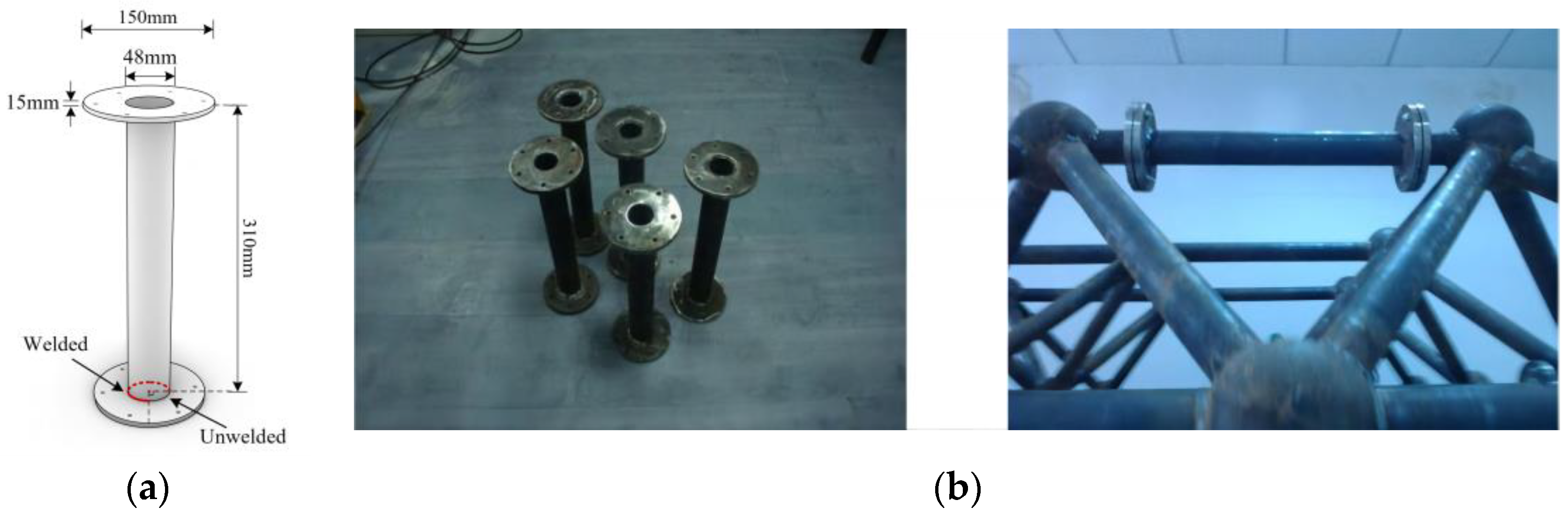
To ensure the accuracy of experimental verification, it is essential to produce both undamaged and damaged structures with identical quality. This is to prevent any identification errors caused by fabrication variations. Consequently, a model of the grid structure with replaceable rods was developed. To simulate joint weld damage, specific individual damaged members were designed. These damaged members could be substituted for the members within the test model, leaving the 90° angle at one end of the damaged member unwelded to the flange, as illustrated in
Figure 11a. When weld damage occurred at a specific location in the model, the corresponding undamaged member could be replaced by the appropriate damaged member, resulting in a grid structure with a weld-damaged joint. The replaceable damaged members are presented in
Figure 11b.
The FBG (fiber Bragg grating) sensor utilizes wavelength modulation as its sensing signal, ensuring that measurement signals remain unaffected by factors such as light source fluctuations, fiber bending losses, connection losses, and detector aging. Additionally, the use of wavelength division multiplexing enables the convenient connection of multiple FBGs in series on a single fiber, allowing distributed measurements. Due to these advantages, FBG sensors have found wide application in civil engineering monitoring and damage identification [
39,
40,
41]. Malekzadeh et al., employed robust regression analysis (RRA) and cross-correlation analysis (CCA) techniques to locate structural damage using strain data collected by FBG sensors deployed on four-span bridge-type structures [
42]. Elshafey designed and fabricated a fiber optic sensing array with eight sensing elements to measure time–history strain at various points on a simply supported beam subjected to random loading, by comparing the random decrements at different damage ratios to an intact case to identify the existence of damage [
43].
In the whole length of FBG, there is such a relationship between the central wavelength, period, and effective refractive index:
where
is the central wavelength,
is the effective refractive index of the core, Λ is the refractive index modulation period of the core.
When the strain
of the optical fiber occurs, Λ becomes Λ′:
According to photoelastic theory, the wavelength chan
is:
where
is the effective photoelastic coefficient.
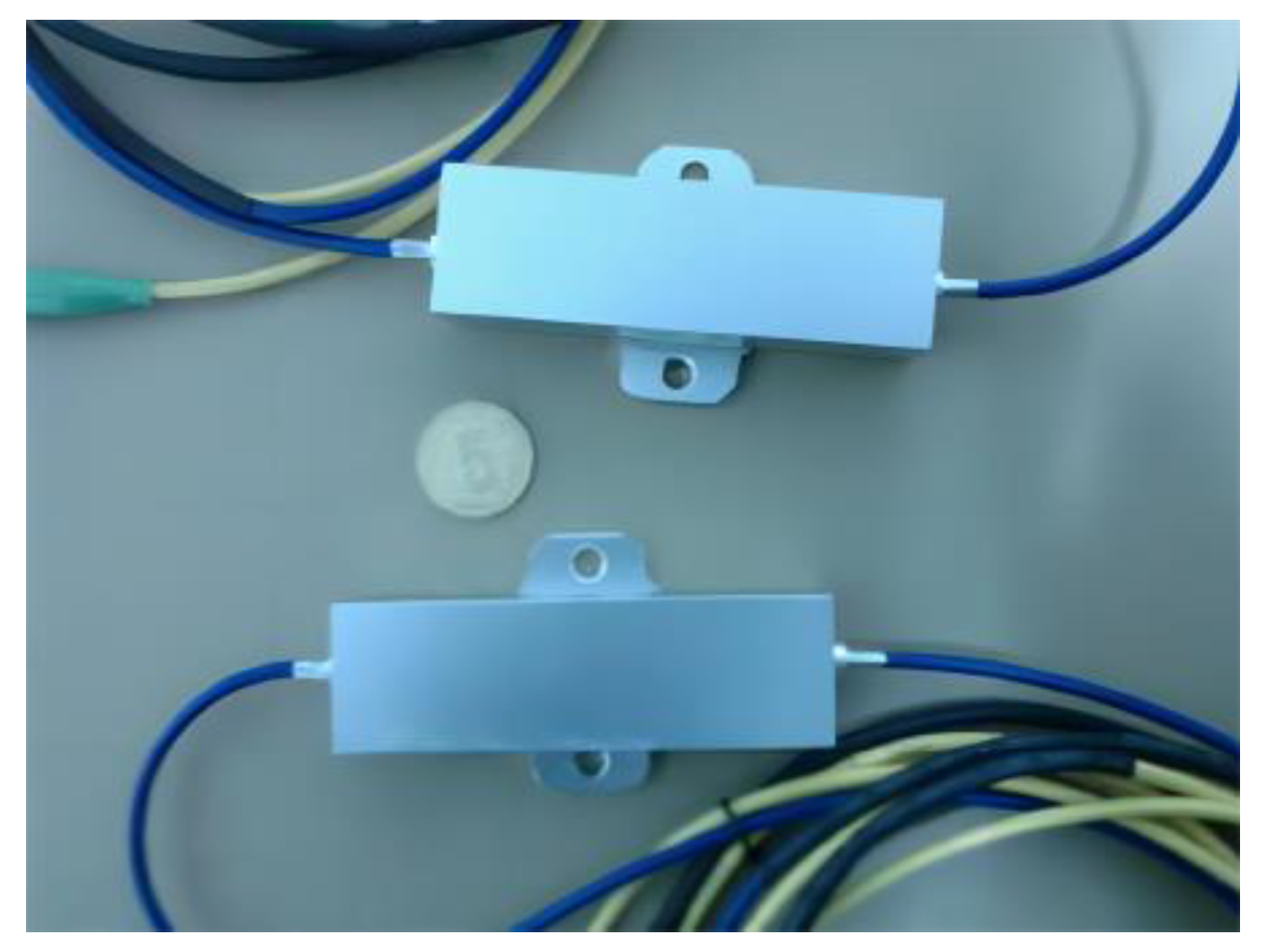
To avoid low measurement stability and noise disturbance in the existing methods, and consider the characteristics of low structural vibration frequency at the same time, a FBG (fiber Bragg grating) acceleration sensor was developed in this study based on the principle that strain and temperature variations affect the refractive index and period of the FBG, subsequently changing its reflection wavelength. In the configuration of the FBG sensor, a lever was located in the center of the sensor, the FBG was straightened above the lever, and a mass block located under the lever. The top of the mass block was connected to the bottom of the lever, and the bottom of the mass block was connected to the inside bottom of the sensor envelope by a spring. When the sensor was installed on the structure, the structure vibration drove the mass block to vibrate, and caused occurrence of tensile force in the FBG through the lever, changing the period and the refractive index of the FBG, and thus modifying the wavelength of its reflection. Notably, a linear relationship between the reflection wavelength and acceleration was observed, allowing acceleration measurement by monitoring the wavelength change. The design of the FBG acceleration sensor is shown in
Figure 12.
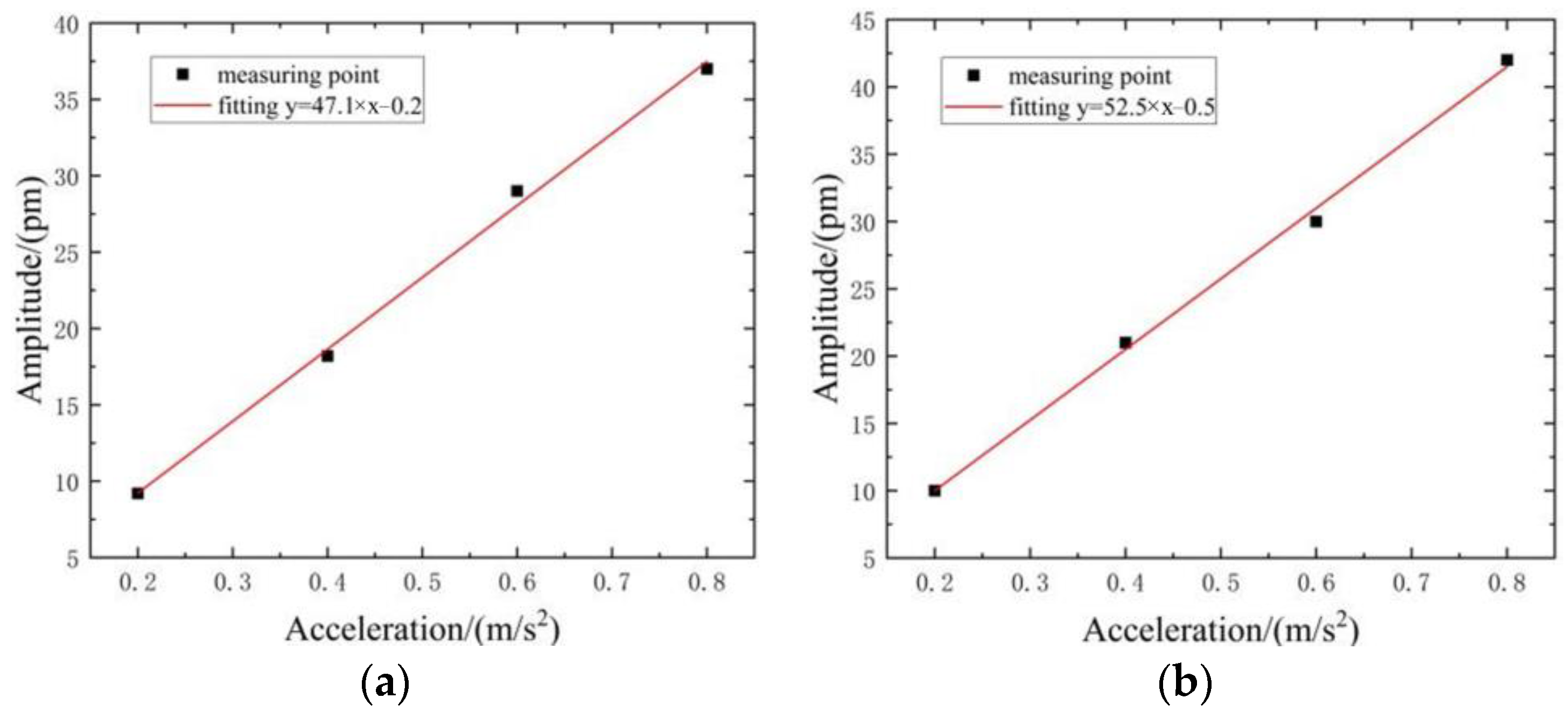
In order to achieve higher sensitivity, the measurement range of the FBG acceleration sensor was set to ±1.0 g, taking into account the expected structural vibration amplitude. Two types of FBG acceleration sensors were designed, with central wavelengths of 1545 nm and 1550 nm, and tested to evaluate their performance, respectively. The test data are shown in
Table 1. Additionally, the corresponding acceleration response curves are depicted in
Figure 13.
Figure 13 illustrates the sensitivity of the FBG accelerometers with central wavelengths of 1545 nm and 1550 nm as 47.1 pm/(m/s
2) and 52.5 pm/(m/s
2), with measurement accuracies of 0.021 m/s
2 and 0.019 m/s
2, respectively. To monitor the structural vibrations, the two FBG accelerometers were installed on key joint 8 in sub-region A and key joint 17 in sub-region B, as shown in
Figure 14.
The si425-500 FBG sensor demodulator, along with its supporting software, was employed to collect the testing data, which is a multi-channel, multi-sensor measurement system utilizing a calibrated wavelength scanning laser, operating at a sampling frequency of 250 Hz and offering a resolution of 1 pm.
3.4. Damage Identification of Weld Joints in Grid Structures
In order to further validate the feasibility and effectiveness of the proposed method, some damage cases were considered, as shown in
Table 2.
By applying an initial displacement on its top, the grid model was excited to vibrate freely, the acceleration responses of the representative joints 8 and 17 were measured with the FBG sensors and analyzed by wavelet transform. Subsequently, when weld damage occurred on a specific joint within this sub-region, the singular value of the high-frequency components of the acceleration response was obtained through wavelet transform, which was then used to determine whether weld damage had occurred in this particular sub-region.
To simulate the sudden occurrence of joint damage in the test and capture the time–history acceleration response, three steps of free vibrations were conducted. In the first step, a horizontal initial displacement of 2 cm in the X direction was applied to the intact structure, causing it to vibrate freely. The time–history acceleration responses of joint 8 and joint 17, referred to as data I, were collected during this vibration. In the second step, a 1 cm displacement in the X direction was applied to the intact structure, leading to another round of free vibration. The acceleration responses of the two joints, referred to as data II, were recorded. In the third step, the same 1 cm displacement in the X direction was applied to the damaged structure resulting in free vibration. The acceleration responses of the two joints were measured as data III.
The splice point of data I and data III was determined by overlapping the corresponding parts of data I and data II, on which data I and data III were spliced together. The combined dataset included the acceleration response information of the joints before and after the occurrence of structural damage.
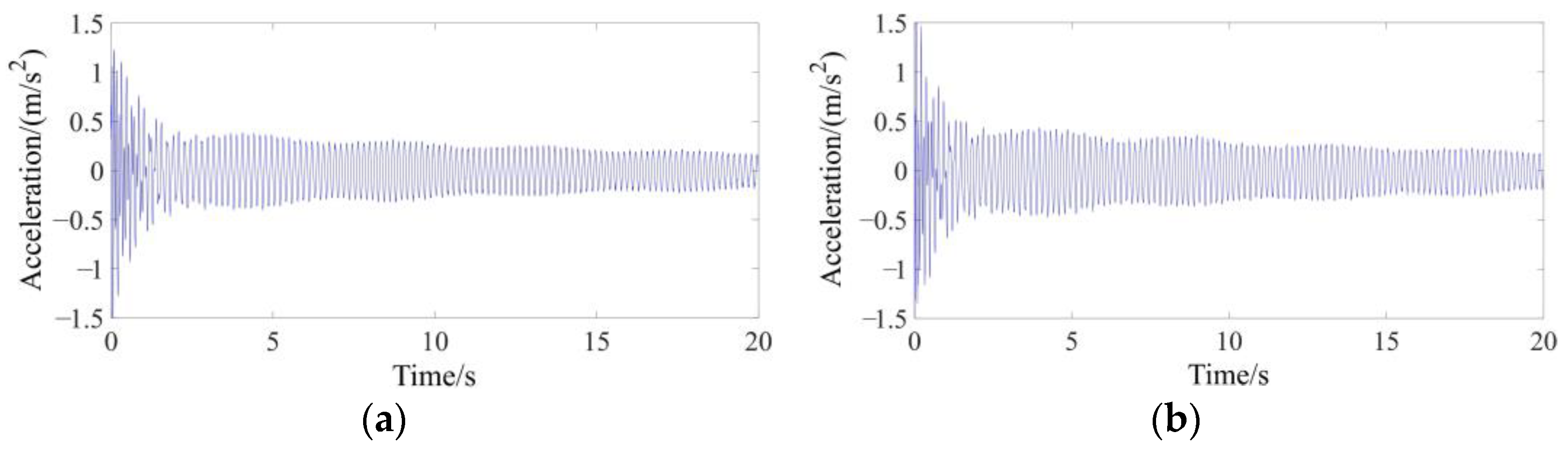
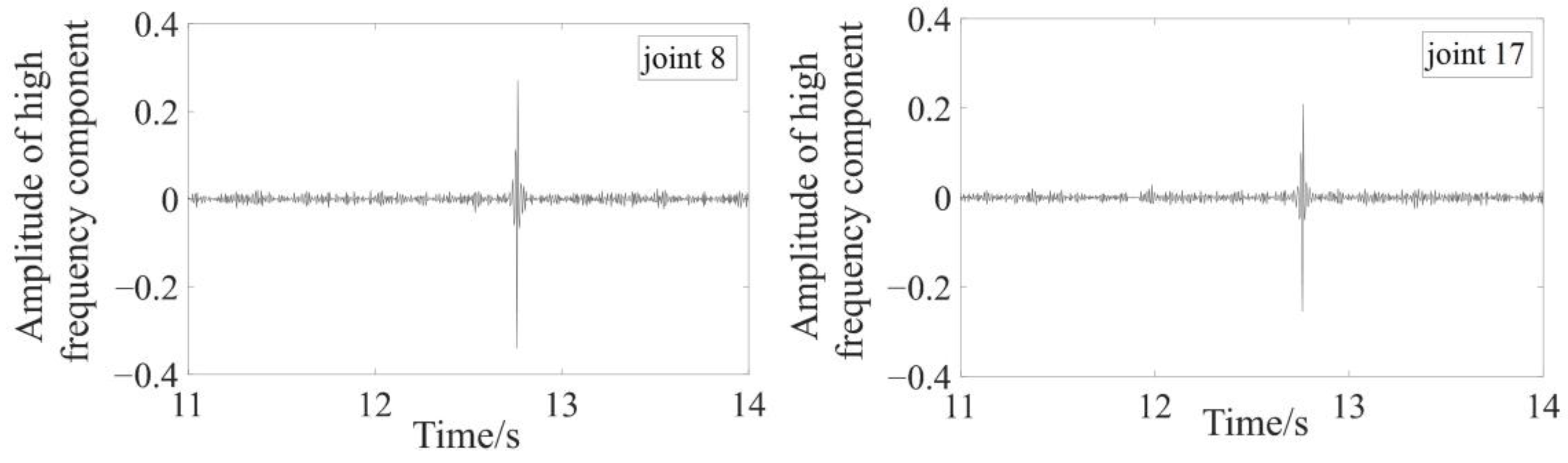
Case 1, which serves as an example to demonstrate the steps of damage identification, involves damage solely at joint 2. The measured acceleration responses of joint 8 and joint 17 are presented in
Figure 15.
Upon observation, it becomes evident that during the stable free-vibration stage that the time–history curves obtained from the FBG accelerometers exhibit relatively smooth and sensitive behavior. This characteristic indicates that the designed accelerometer possesses excellent anti-noise performance and sensitivity, allowing precise measurement of the structural response.
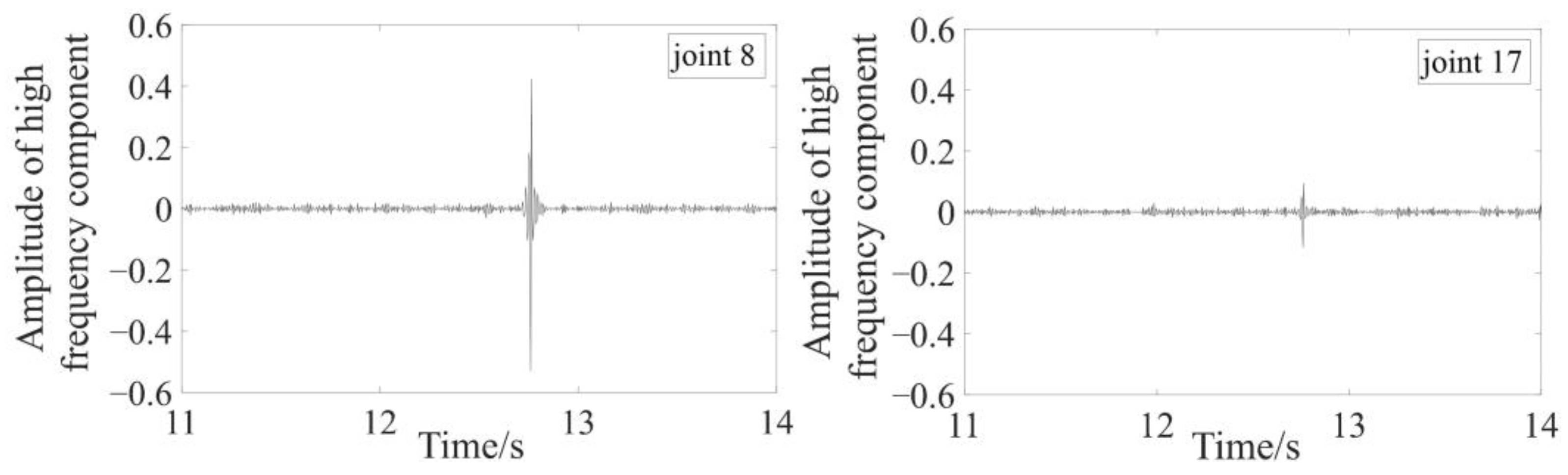
The wavelet transform was performed on the acceleration responses of the joints to analyze and extract the singular value of the high-frequency component. The amplitude of this singular value can be utilized to determine whether weld damage has occurred at sub-region A or B within the structure.
Figure 16 displays the amplitudes of the singular value of the high-frequency component for the two key joints.
Figure 16 reveals that the amplitude of the singular value of joint 8 is notably higher than that of joint 17. This stark difference indicates the presence of weld damage in structural sub-region A. Moreover, the results of
Figure 16 also illustrate the feasibility of adopting the method proposed in this paper to simulate weld damage at the joints of the grid structure in the experiment, and the obtained acceleration response time histories of arrayed sensor joints also successfully characterize the occurrence of weld damage at the joints.
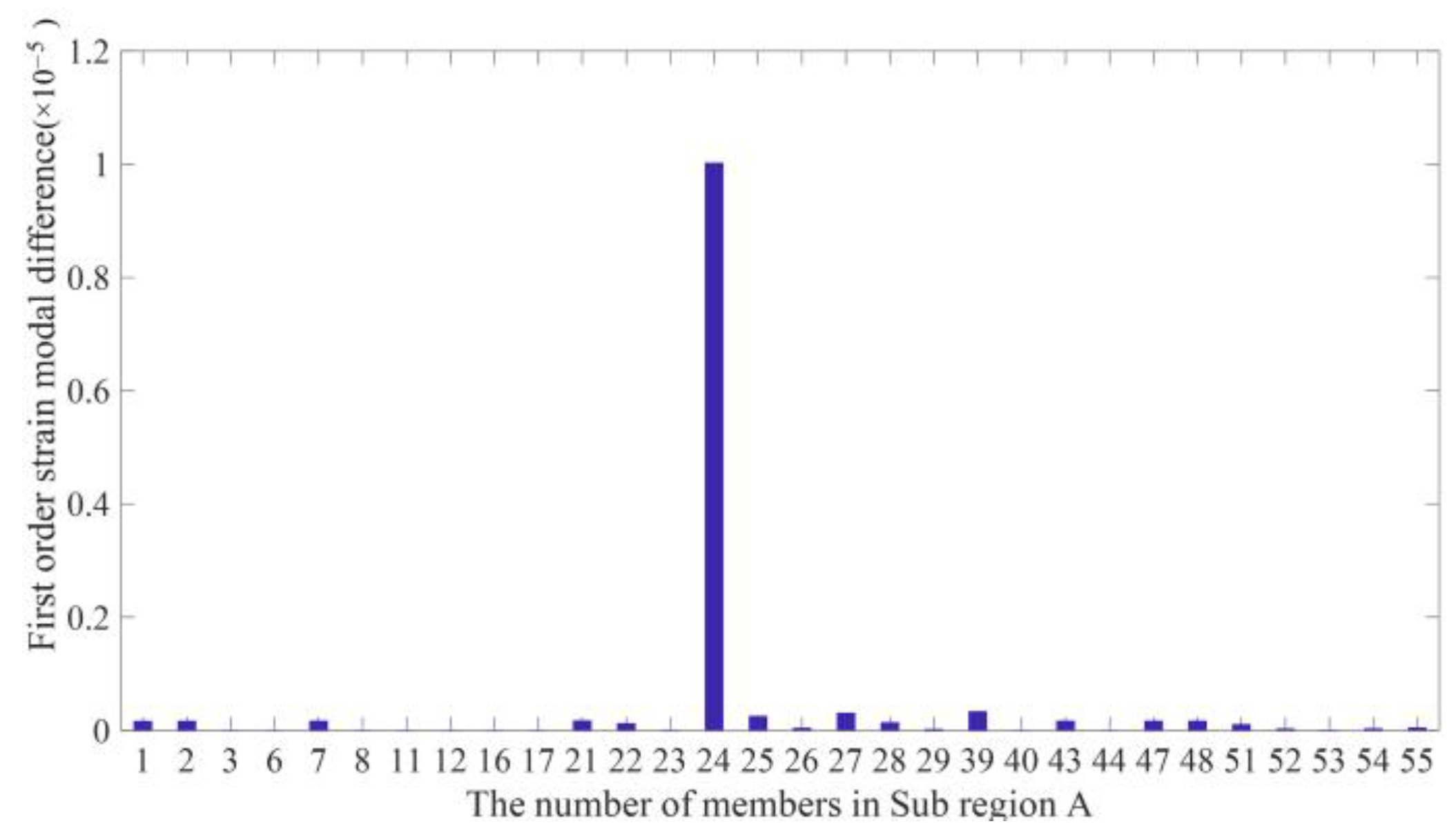
In the first step it was determined that the weld damage occurred in the sub-region A. In the second step, the membership degree between the eigenvectors of each pattern library and the corresponding
Id vectors in this sub-region A was calculated using the strain mode difference. The strain mode difference of each member in sub-region A is shown in
Figure 17.
Subsequently, the damage index
Id was determined by comparing the strain mode difference with the corresponding member with 345° joint damage in each pattern library. Finally, the membership degrees between the
Id vector and all pattern libraries in sub-region A were calculated. The pattern with the highest membership degree represents the pattern of joint damage. Some membership degree diagrams are shown in
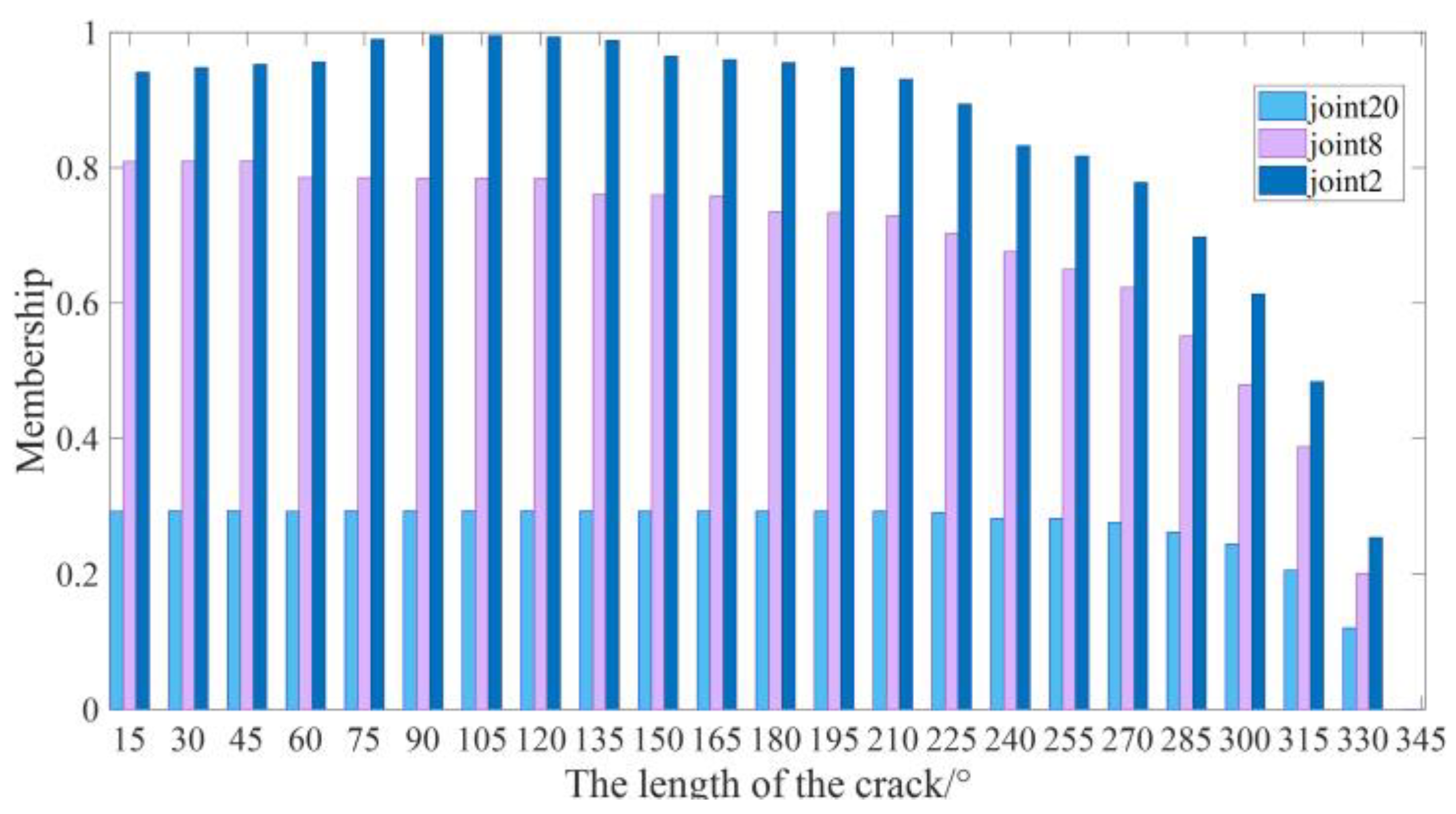
Figure 18.
Figure 18 depicts the membership degree between the damage pattern of Case 1 and the 23 pattern libraries of the damaged joint 2 of No. 24 member. It also shows the membership degree between Case 1 and the pattern libraries of the damaged joint 8 of No. 24 member, as well as the membership degree between Case 1 and the pattern libraries of the damaged joint 20 of No. 26 member.
Since joint 2 is adjacent to joint 8, and the sensitive members of the damage pattern for joint 8 are the No. 24 and No. 25 members, which are the same as those for joint 2, the membership degree is higher but still smaller than that of joint 2. On the other hand, joint 20 is farther away from joint 2, and its sensitive members are No. 25 and No. 26, which are not exactly the same as those for joint 2. As a result, the membership degree for joint 20 is much smaller compared with joint 2. Therefore, it is confirmed that the damage occurred on joint 2 of No. 24 member. The corresponding membership values are shown in
Table 3.
Based on the values of the membership degree, it is evident that the maximum membership degree is 0.9958 when the weld damage of joint 2 in No. 24 member is approximately 90°. This high membership degree indicates that the damage location is indeed at joint 2 of No. 24 member in sub-region A. Furthermore, the damage extent is most likely to be around 90°, which aligns with the findings of Case 1.
In Case 2, the identification process is similar to that of Case 1.
Figure 19 and
Figure 20 present the results identifying the location and extent of weld damage for two joints.
Table 4 provides further details and information related to the results.
Based on
Figure 19, it is apparent that there is minimal difference between the singular values of joint 8 and joint 17. This suggests that weld damage has occurred in both sub-regions A and B.
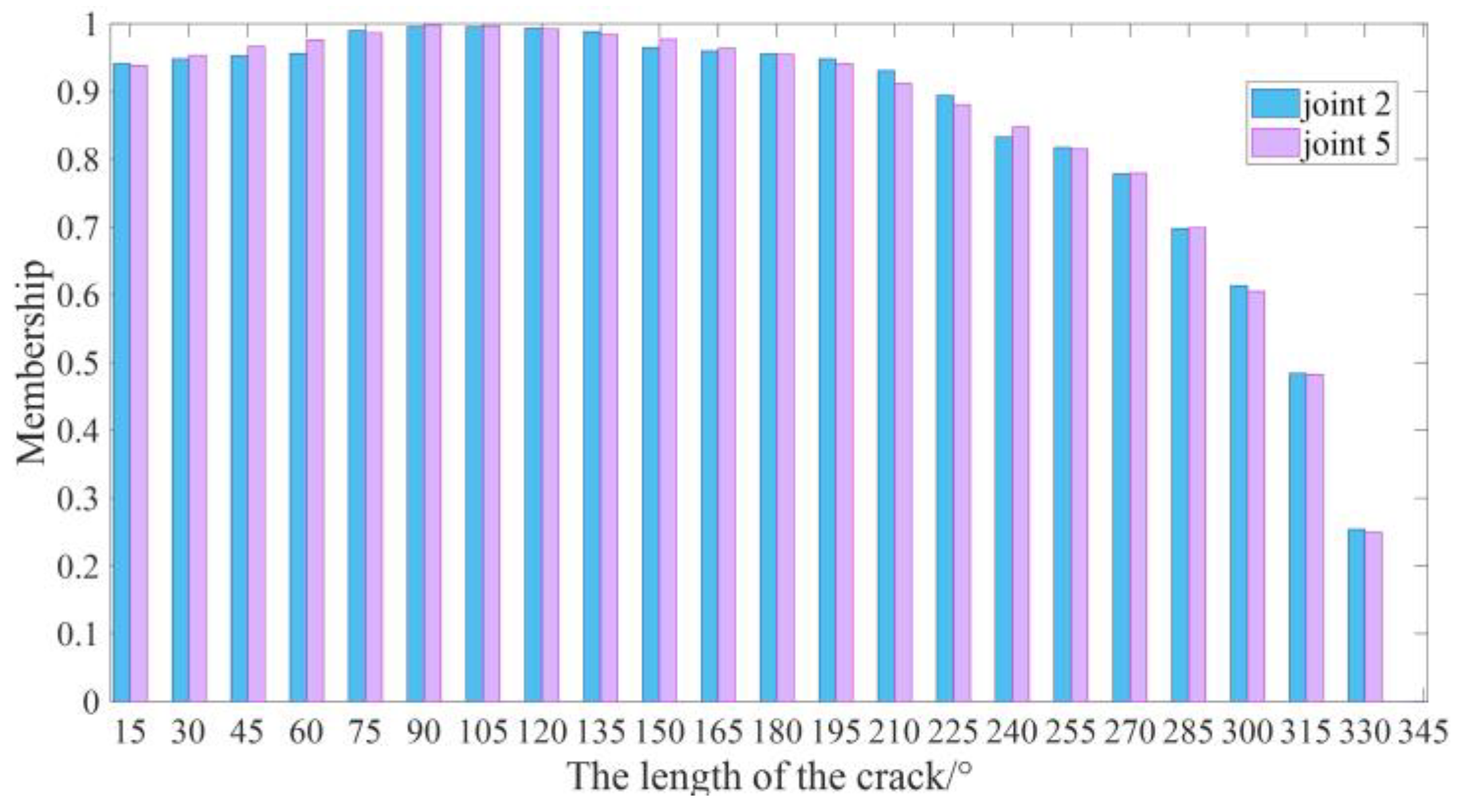
Figure 20 and
Table 4 provide additional insights into the identification process.
From
Figure 20 and
Table 4, it can be observed that the maximum membership degree for joint weld damage in the pattern library is 0.9954 for joint 2 connected with No. 24 member in sub-region A and 0.9933 for joint 5 connected with No. 33 member in sub-region B. Both cases indicate a possibility of 90° weld damage. These findings confirm that both joint 2 of No. 24 member in sub-region A and joint 5 of No. 33 member in sub-region B have the highest likelihood of experiencing 90° weld damage, which aligns with the damage scenario presented in Case 2.
3.5. Discussion
The experimental verification demonstrates that partitioning the grid structure allows it to fully leverage the benefits of the wavelet analysis method in capturing sudden shifts in joint response signals caused by structural damage, leading to a reduction in complexity and symmetry. As a result, it becomes feasible to identify the specific sub-region where joint damage occurs by solely analyzing the acceleration responses from sensors deployed on the joints.
By limiting the number of joints and members in each sub-region, the number of potential joint damage patterns per sub-region is significantly reduced. Consequently, a comprehensive pattern library can be constructed with minimal computational effort. Moreover, the adoption of the fuzzy pattern recognition method in the sub-regions with joint damage not only simplifies the recognition of structural damage but also enhances the efficiency and accuracy of the method’s application.
Thus, the combination of these two methods enables the effective recognition of damage in large and intricate structures, such as grid structures, offering a promising approach for practical application.
While the experimental results have demonstrated the effectiveness of the method, its application to a practical engineering scenario poses certain challenges. One notable difficulty is the demanding service conditions of grid structures, leading to the inclusion of inherent noise in the original measurement information. Despite the recommendation to employ FBG acceleration sensors for enhanced measurement accuracy, the measured acceleration responses may still be affected by noise, potentially leading to an increase in the number of structural sub-regions. Consequently, this may result in reduced recognition efficiency and accuracy.
To address this issue, it is essential to process the measured raw information and apply noise reduction techniques. By doing so, the method can be effectively applied to accurately recognize damage in joints of grid structures in practical engineering.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}