
Integrating BIM–IoT and Autonomous Mobile Robots for Construction Site Layout Printing





Abstract
:1. Introduction
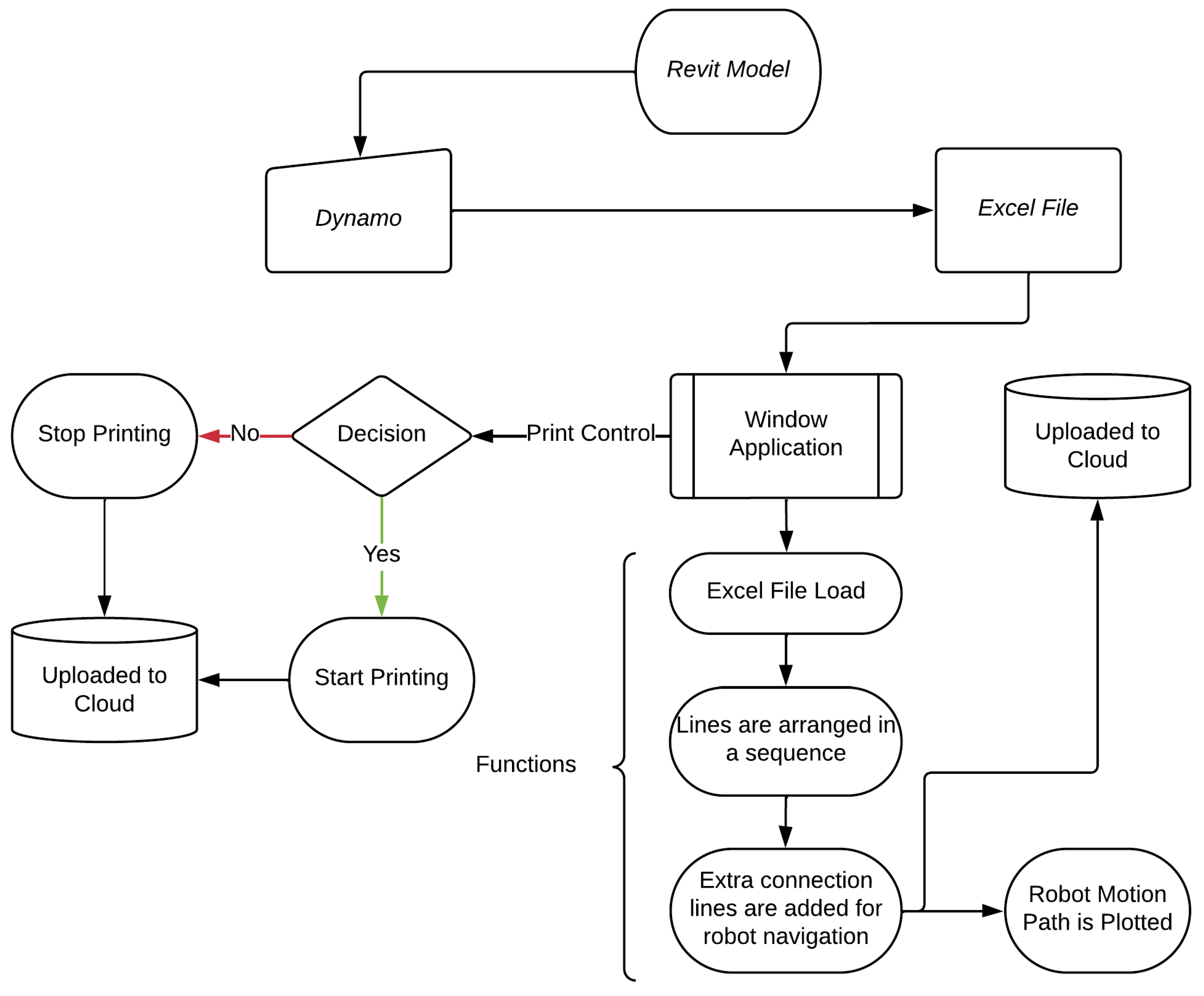
- To address this interoperability gap for the layout marking process, the authors propose a framework for the automated extraction and analysis of floor plans from BIM models using Dynamo. The data extracted are then input into the Windows application developed in this study to determine and draw an optimal path for the IoT-powered robot. Finally, the data are uploaded to the robot via the Internet using the Firestore real-time database to draw the floor plans on an actual scale on the construction site. The proposed framework uses a set of algorithms for robotic systems to automatically perform the printing operations based on the extracted and analyzed input data from BIM. This framework will facilitate accurate and precise site layout printing operations by utilizing the information extracted from BIM models in real-time. Accordingly, the objectives of this study include:
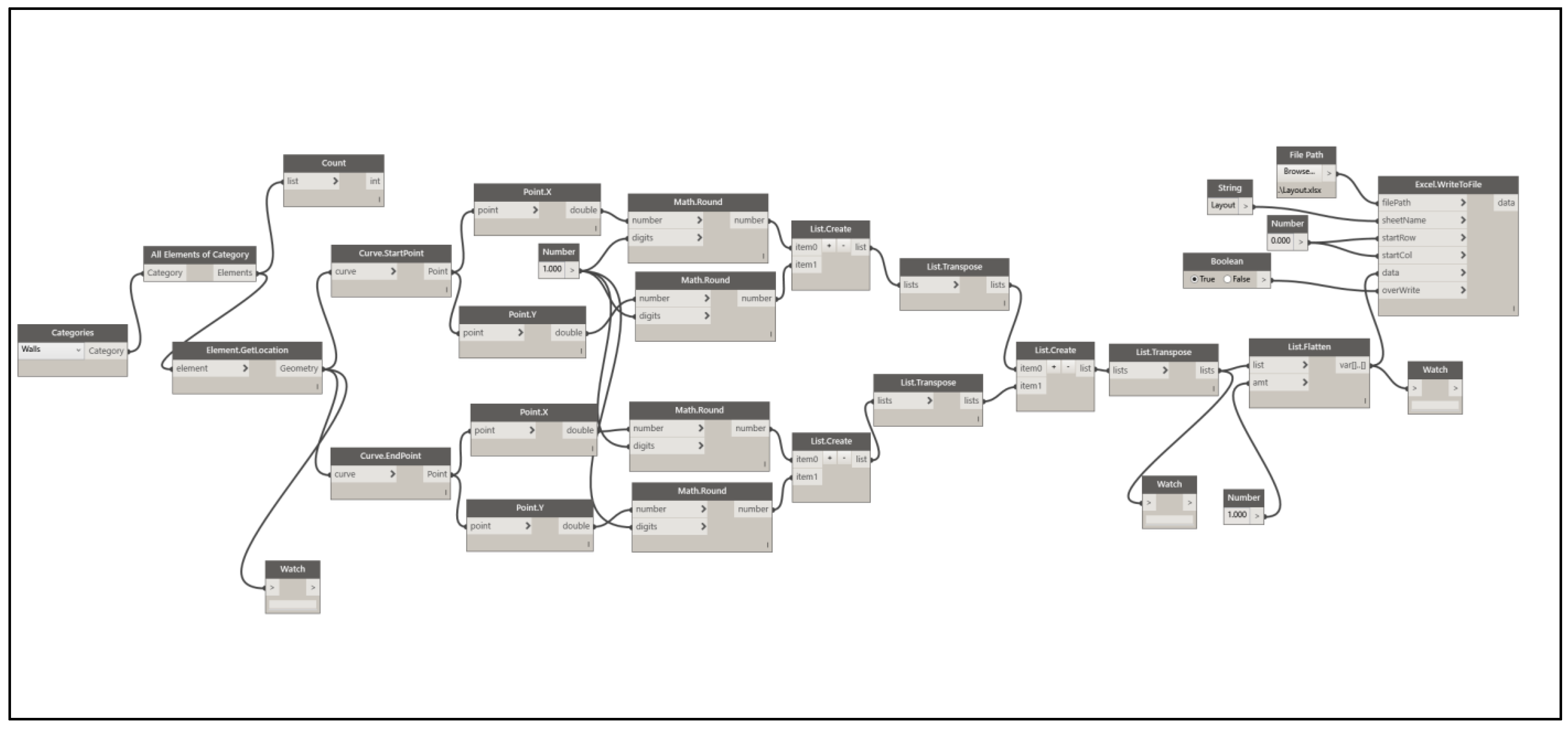
- To extract data from BIM models using Dynamo and process it through a Windows application to establish an efficient workflow for transforming the BIM data into a format suitable for the layout printing robot.
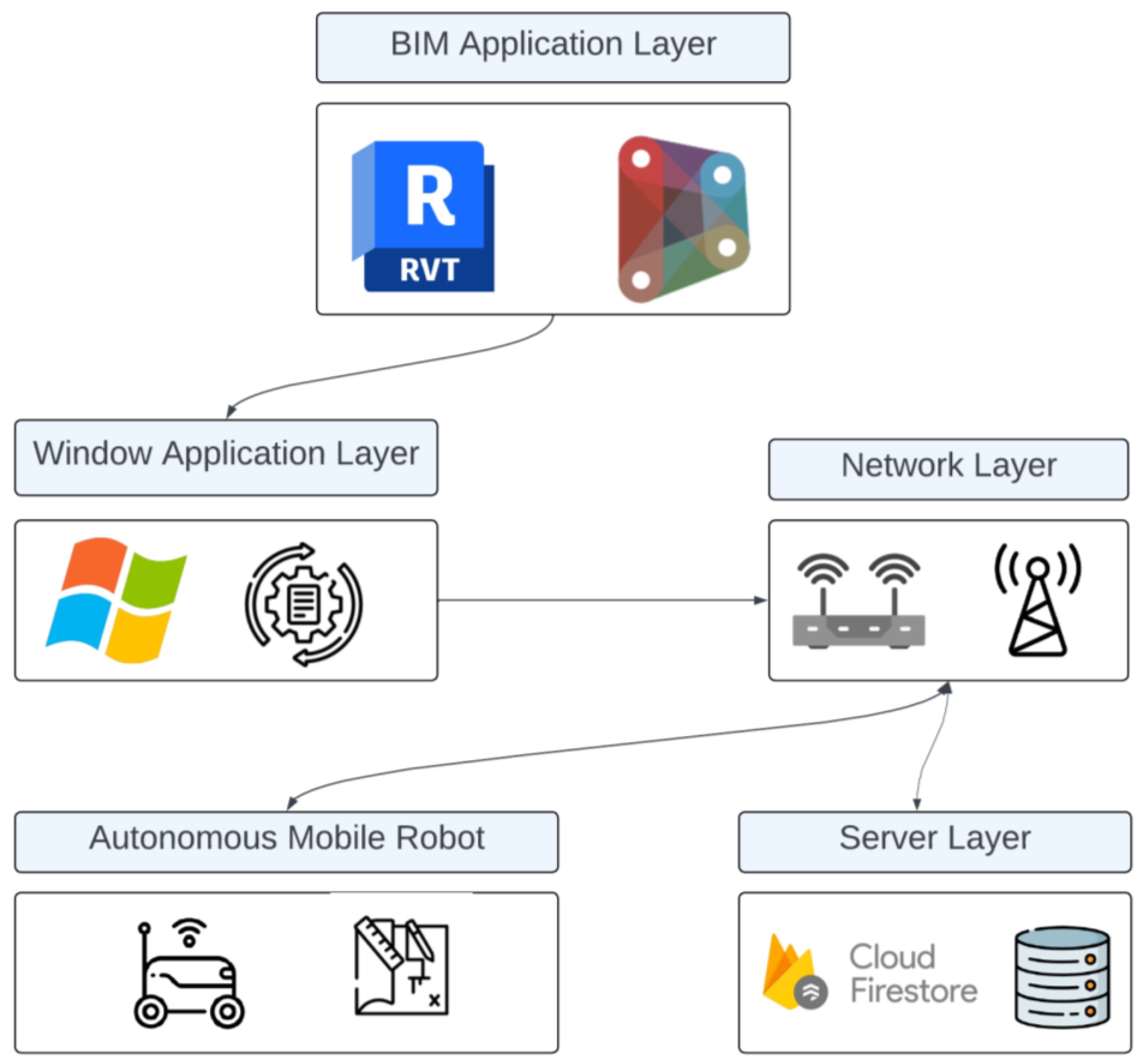
- To develop a comprehensive framework that enables smooth communication and data exchange between BIM models and robotic systems through the IoT.
2. Existing Robotic Systems for Construction Site Layout Drawings
3. Research Methodology
3.1. Proposed Framework
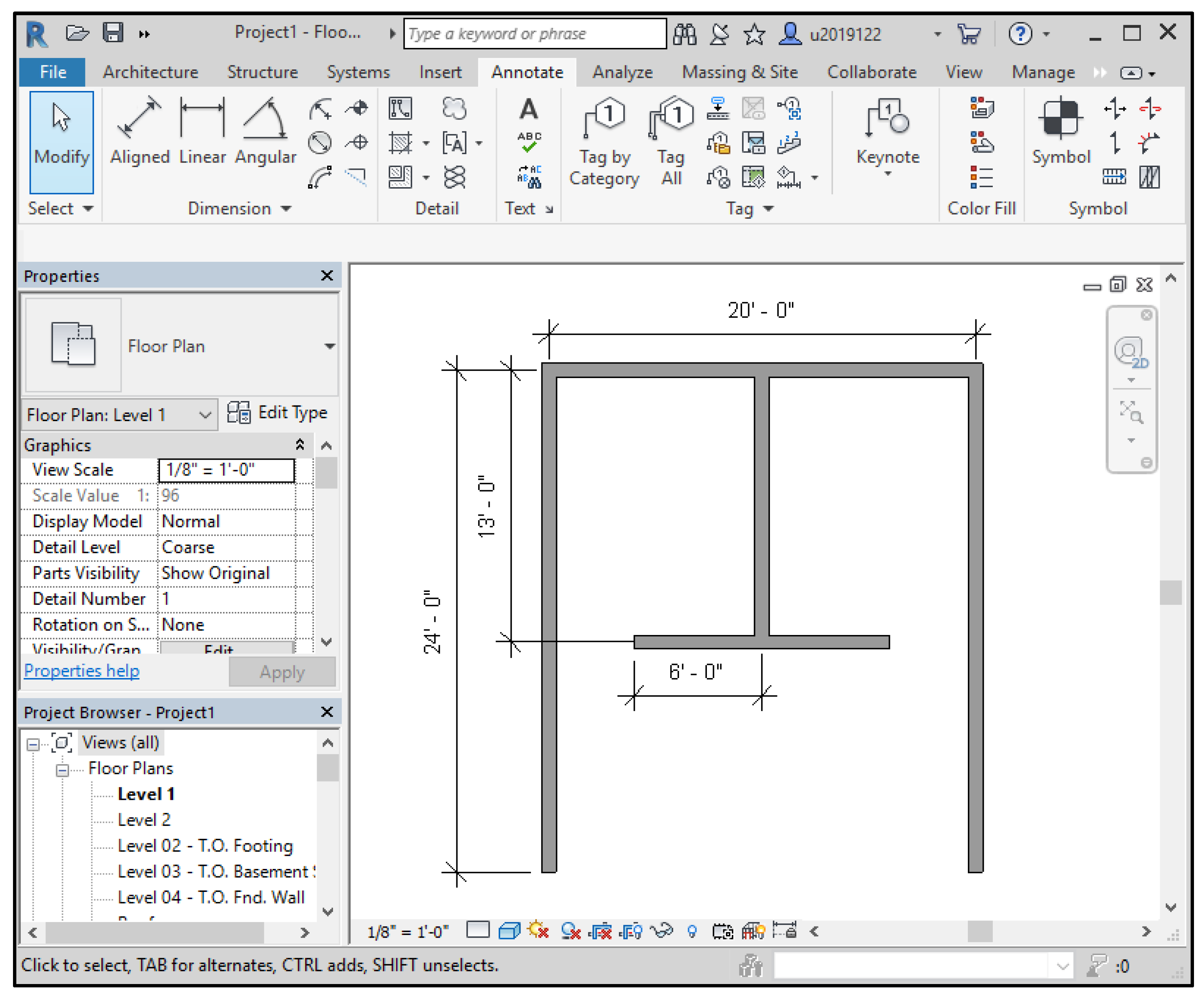
3.2. BIM Model and Information Extraction
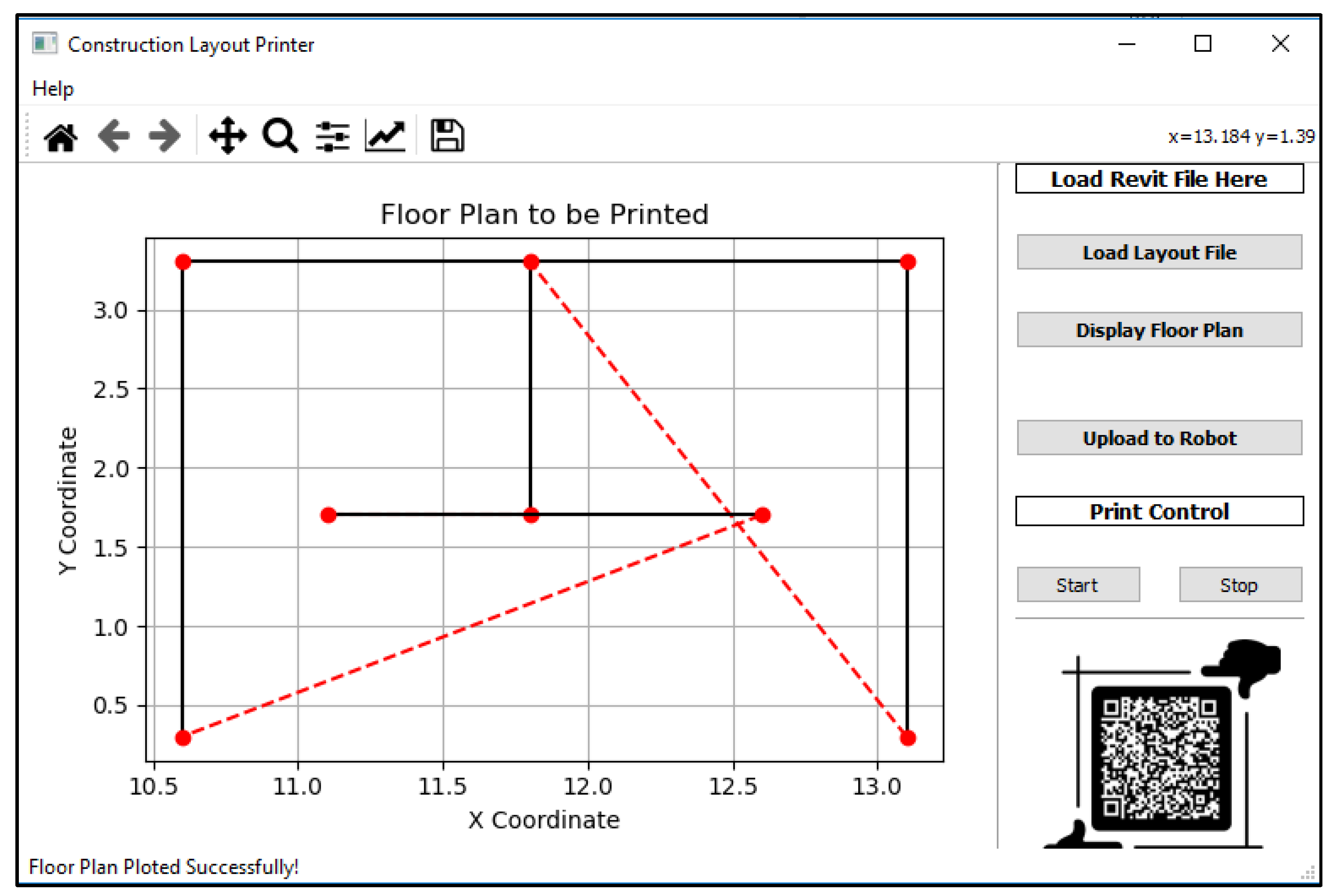
3.3. Developed Windows Application
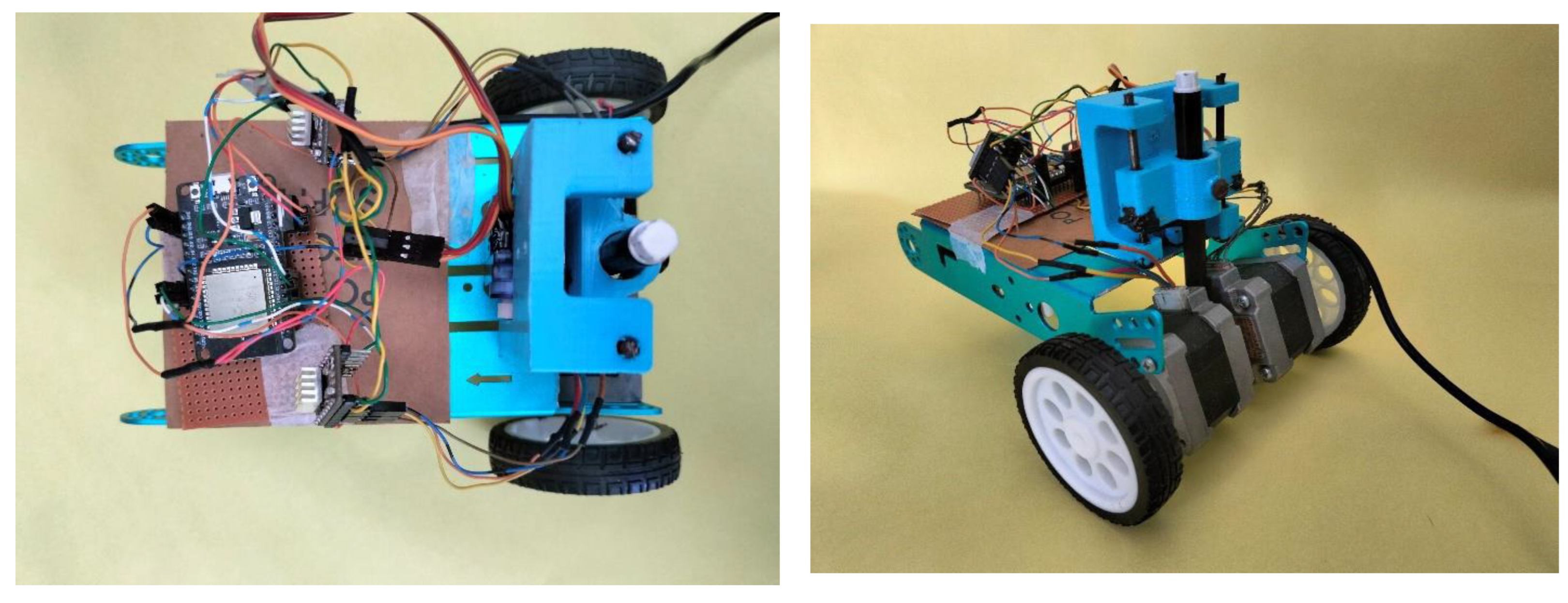
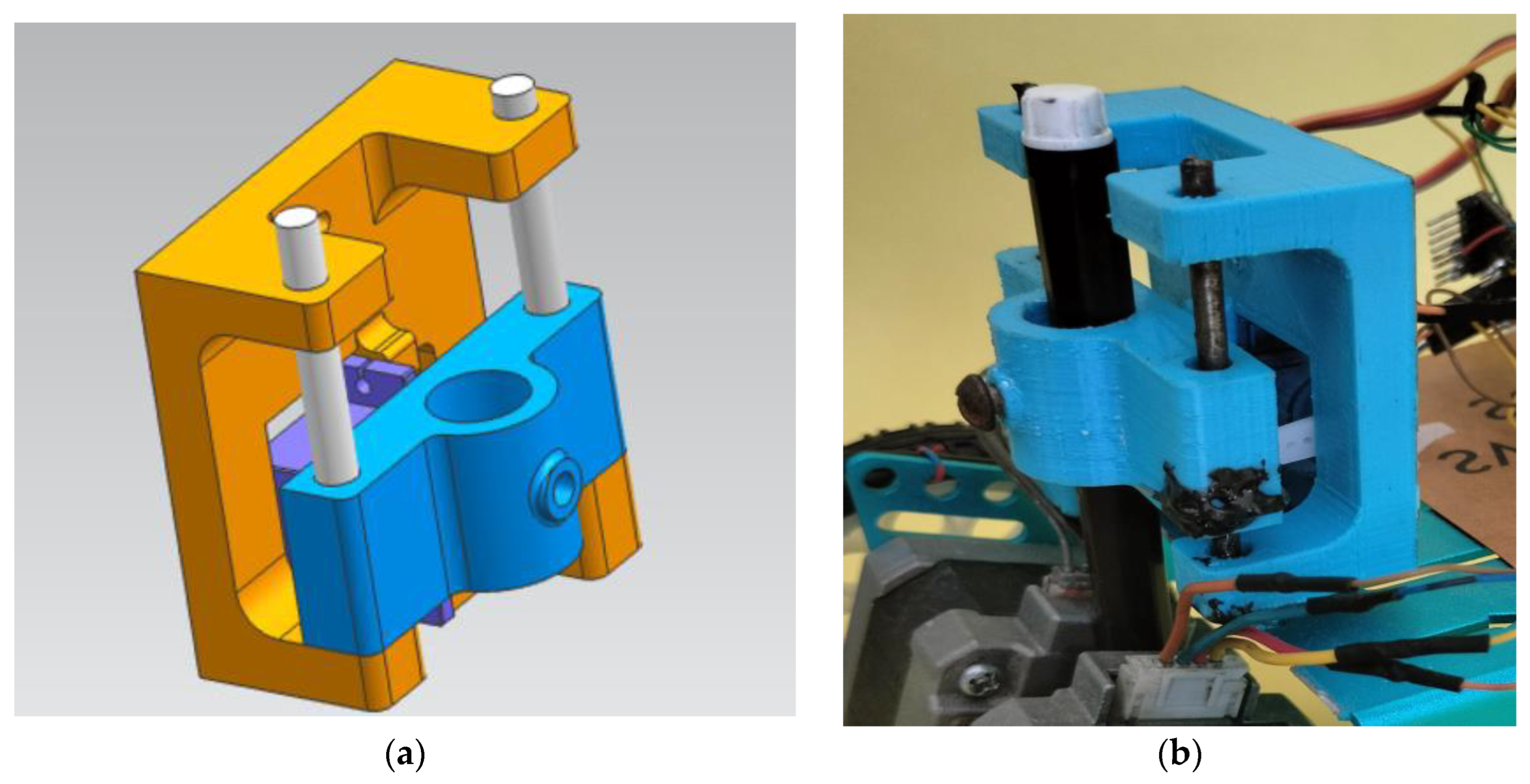
3.4. Proposed Robotic System Design
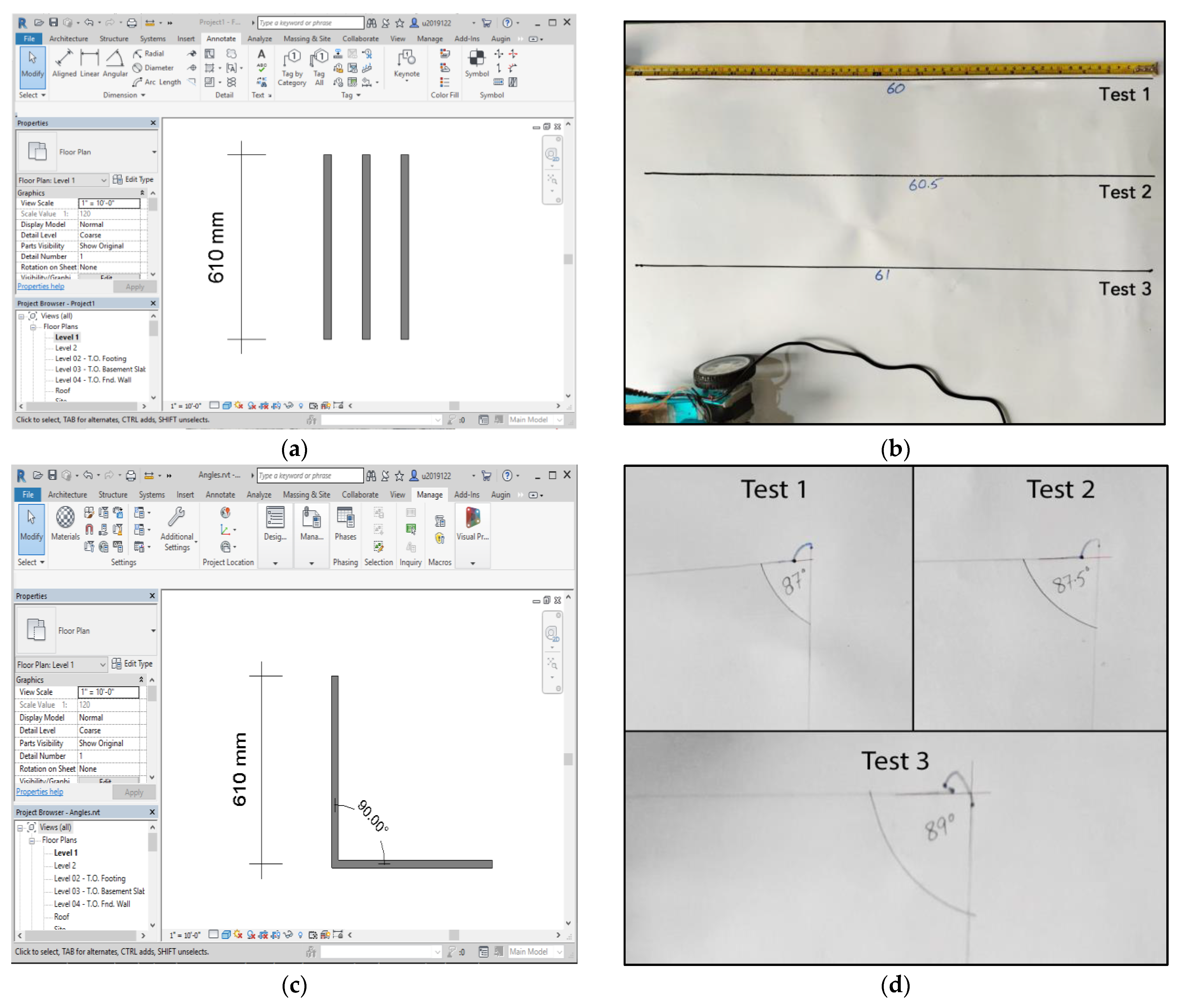
4. System Testing
5. Discussion
6. Conclusions, Limitations and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Q.; García de Soto, B.; Adey, B.T. Construction Automation: Research Areas, Industry Concerns and Suggestions for Advancement. Autom. Constr. 2018, 94, 22–38. [Google Scholar] [CrossRef]
- Changali, S.; Mohammad, A.; Van Nieuwland, M. The Construction Productivity Imperative. In McKinsey Quarterly; McKinsey: New York, NY, USA, 2015. [Google Scholar]
- Ma, X.; Mao, C.; Liu, G. Can Robots Replace Human Beings?—Assessment on the Developmental Potential of Construction Robot. J. Build. Eng. 2022, 56, 104727. [Google Scholar] [CrossRef]
- Haas, C.; Skibniewski, M.; Budny, E. Robotics in Civil Engineering. Comput. Aided Civ. Infrastruct. Eng. 1995, 10, 371–381. [Google Scholar] [CrossRef]
- García de Soto, B.; Agustí-Juan, I.; Hunhevicz, J.; Joss, S.; Graser, K.; Habert, G.; Adey, B.T. Productivity of Digital Fabrication in Construction: Cost and Time Analysis of a Robotically Built Wall. Autom. Constr. 2018, 92, 297–311. [Google Scholar] [CrossRef]
- Streule, T.; Miserini, N.; Bartlomé, O.; Klippel, M.; de Soto, B.G. Implementation of Scrum in the Construction Industry. Procedia Eng. 2016, 164, 269–276. [Google Scholar] [CrossRef]
- Kim, K.P.; Freda, R.; Nguyen, T.H.D. Building Information Modelling Feasibility Study for Building Surveying. Sustainability 2020, 12, 4791. [Google Scholar] [CrossRef]
- Ullah, F. (Ed.) Towards Smart Tech 4.0 in the Built Environment: Applications of Disruptive Digital Technologies in Smart Cities, Construction, and Real Estate; MDPI: Basel, Switzerland, 2023; ISBN 978-3-0365-7355-7. [Google Scholar]
- Amini, S.; Rezvani, A.; Tabassi, M.; Malek Sadati, S.S. Causes of Cost Overruns in Building Construction Projects in Asian Countries; Iran as a Case Study. Eng. Constr. Archit. Manag. 2022, 30, 2739–2766. [Google Scholar] [CrossRef]
- Taha, G.; Sherif, A.; Badawy, M. Overall Cost Overrun Estimate in Residential Projects: A Hybrid Dynamics Approach. Appl. Comput. Intell. Soft Comput. 2022, 2022, 2285971. [Google Scholar] [CrossRef]
- Propeller Aero 10 Construction Project Cost Overrun Statistics You Need to Hear. Available online: https://www.propelleraero.com/blog/10-construction-project-cost-overrun-statistics-you-need-to-hear/ (accessed on 25 July 2023).
- Dobbs, R.; Pohl, H.; Lin, D.-Y.; Mischke, J.; Garemo, N.; Hexter, J.; Matzinger, S.; Palter, R.; Nanavatty, R. Infrastructure Productivity: How to Save $1 Trillion a Year; McKinsey Global Institute: New York, NY, USA, 2013. [Google Scholar]
- Williams, B. The Real Cost of Inefficient Construction Layout. Available online: https://constructible.trimble.com/construction-industry/the-real-cost-of-inefficient-construction-layout (accessed on 25 July 2023).
- AGC Construction Workforce Shortages Risk Undermining Infrastructure Projects as Most Contractors Struggle to Fill Open Positions. Available online: https://www.agc.org/news/2022/08/31/construction-workforce-shortages-risk-undermining-infrastructure-projects-most-contractors-struggle-0 (accessed on 25 July 2023).
- Sestras, P. Methodological and On-Site Applied Construction Layout Plan with Batter Boards Stake-out Methods Comparison: A Case Study of Romania. Appl. Sci. 2021, 11, 4331. [Google Scholar] [CrossRef]
- Zhao, J.; Hu, Y.; Tian, M. Pose Estimation of Excavator Manipulator Based on Monocular Vision Marker System. Sensors 2021, 21, 4478. [Google Scholar] [CrossRef]
- Jensfelt, P.; Gullstrand, G.; Förell, E. A Mobile Robot System for Automatic Floor Marking. J. Field Robot. 2006, 23, 441–459. [Google Scholar] [CrossRef]
- Peter, E.; Love, D.; Heng, L.I. Quantifying the Causes and Costs of Rework in Construction. Constr. Manag. Econ. 2000, 18, 479–490. [Google Scholar] [CrossRef]
- Kitahara, T.; Satou, K.; Onodera, J. Marking Robot in Cooperation with Three-Dimensional Measuring Instruments. In Proceedings of the ISARC 2018—35th International Symposium on Automation and Robotics in Construction and International AEC/FM Hackathon: The Future of Building Things, Berlin, Germany, 22 July 2018. [Google Scholar]
- Tsuruta, T.; Miura, K.; Miyaguchi, M. Mobile Robot for Marking Free Access Floors at Construction Sites. Autom. Constr. 2019, 107, 102912. [Google Scholar] [CrossRef]
- Anane, W.; Iordanova, I.; Ouellet-Plamondon, C. Building Information Modeling (BIM) and Robotic Manufacturing Technological Interoperability in Construction—A Cyclic Systematic Literature Review. Digit. Manuf. Technol. 2023, 3, 1–29. [Google Scholar] [CrossRef]
- Biancardo, S.A.; Gesualdi, M.; Savastano, D.; Intignano, M.; Henke, I.; Pagliara, F. An Innovative Framework for Integrating Cost-Benefit Analysis (CBA) within Building Information Modeling (BIM). Socioecon Plann Sci 2023, 85, 101495. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, H.; Xu, J. Towards Fully BIM-Enabled Building Automation and Robotics: A Perspective of Lifecycle Information Flow. Comput. Ind. 2022, 135, 103570. [Google Scholar] [CrossRef]
- Schöberl, M.; Huber, A.; Kreppold, S.; Dirnaichner, J.; Kessler, S.; Fottner, J. Cobot Uptake in Construction: Embedding Collaborative Robots in Digital Construction Processes. Constr. Robot. 2023, 7, 89–103. [Google Scholar] [CrossRef]
- Xiao, B.; Chen, C.; Yin, X. Recent Advancements of Robotics in Construction. Autom. Constr. 2022, 144, 104591. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Heravi, A.; Thaheem, M.J.; Maqsoom, A. Inspecting Buildings Using Drones and Computer Vision: A Machine Learning Approach to Detect Cracks and Damages. Drones 2022, 6, 5. [Google Scholar] [CrossRef]
- Abdeen, F.N.; Gunatilaka, R.N.; Sepasgozar, S.M.E.; Edwards, D.J. The Usability of a Novel Mobile Augmented Reality Application for Excavation Process Considering Safety and Productivity in Construction. Constr. Innov. 2022, in press. [Google Scholar] [CrossRef]
- Manuel Davila Delgado, J.; Oyedele, L. Robotics in Construction: A Critical Review of the Reinforcement Learning and Imitation Learning Paradigms. Adv. Eng. Inform. 2022, 54, 101787. [Google Scholar] [CrossRef]
- Ullah, F. Smart Tech 4.0 in the Built Environment: Applications of Disruptive Digital Technologies in Smart Cities, Construction, and Real Estate. Buildings 2022, 12, 1516. [Google Scholar] [CrossRef]
- Yahya, M.Y.B.; Lee Hui, Y.; Yassin, A.B.M.; Omar, R.; Robin, R.O.A.; Kasim, N. The Challenges of the Implementation of Construction Robotics Technologies in the Construction. In MATEC Web of Conferences; EDP Sciences: Yu Lisi, UK, 2019; Volume 266. [Google Scholar] [CrossRef]
- Anane, W.; Iordanova, I.; Ouellet-Plamondon, C. BIM-Driven Computational Design for Robotic Manufacturing in off-Site Construction: An Integrated Design-to-Manufacturing (DtM) Approach. Autom. Constr. 2023, 150, 104782. [Google Scholar] [CrossRef]
- Tanaka, K.; Kajitani, M.; Kanamori, C.; Itoh, H.; Abe, Y.; Tanaka, Y. Development of Marking Robot Working at Building Sites. In Proceedings of the 12th International Symposium on Automation and Robotics in Construction (ISARC), Warsaw, Poland, 30 May–1 June 1995. [Google Scholar]
- Abidin, Z.Z.; Hamid, S.B.A.; Aziz, A.A.A.; Ab Malek, A. Development of a Vision System for a Floor Marking Mobile Robot. In Proceedings of the 2008 Fifth International Conference on Computer Graphics, Imaging and Visualisation, Modern Techniques and Applications, CGIV, Penang, Malaysia, 26–28 August 2008. [Google Scholar]
- Tanaka, K.; Kajitani, M.; Ito, H.; Kanamori, C.; Abe, Y.; Tanaka, Y. Development of a Construction Robot for Marking on Ceiling Boards. Nippon. Kikai Gakkai Ronbunshu C Hen/Trans. Jpn. Soc. Mech. Eng. Part C 1996, 62, 658–664. [Google Scholar] [CrossRef]
- Inoue, F.; Doi, S.; Omoto, E. Development of High Accuracy Position Making System Applying Mark Robot in Construction Site. In Proceedings of the SICE Annual Conference, Tokyo, Japan, 13–18 September 2011. [Google Scholar]
- Lee, A.Y.; Seo, H.C.; Park, E.S. Development of a Manually Operated Mobile Robot That Prints Construction Site Layouts. Machines 2022, 10, 1192. [Google Scholar] [CrossRef]
- Kamarudin, K. Development of IoT Based Mobile Robot for Automated Guided Vehicle Application. J. Electron. Inf. Syst. 2019, 1. [Google Scholar] [CrossRef]
- Karahan, O.; Hökelek, H. Mobile Robot Position Controlling System Based On IoT Through Raspberry Pi. J. Intell. Syst. Theory Appl. 2020, 3, 25–30. [Google Scholar] [CrossRef]
- Suhana Nafais, A.; Cibi, S.L.; Harish Kumar, A.; Tharani, M.; Viswak Avinash, S.P. An IoT Based Intelligent Cargo Carrier. In Proceedings of the 2023 7th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, Tamil Nadu, 17–19 May 2023; IEEE: Piscataway Township, NJ, USA, 2023; pp. 1569–1574. [Google Scholar]
- Tao, G.; Feng, H.; Feng, J.; Wang, T. Dynamic Multi-Objective Construction Site Layout Planning Based on BIM. KSCE J. Civ. Eng. 2022, 26, 1522–1534. [Google Scholar] [CrossRef]
- Tang, S.; Shelden, D.R.; Eastman, C.M.; Pishdad-Bozorgi, P.; Gao, X. A Review of Building Information Modeling (BIM) and the Internet of Things (IoT) Devices Integration: Present Status and Future Trends. Autom. Constr. 2019, 101, 127–139. [Google Scholar] [CrossRef]
- Al Hawarneh, A.; Bendak, S.; Ghanim, F. Construction Site Layout Planning Problem: Past, Present and Future. Expert Syst. Appl. 2021, 168, 114247. [Google Scholar] [CrossRef]
- Revit® Architecture 2018 for Designers; Bloomsbury Publishing Plc: New York, NY, USA, 2017; ISBN 978-1-5013-2773-5.
- Divin, N.V. BIM by Using Revit API and Dynamo: A Review. AlfaBuild 2020, 14, 1404. [Google Scholar]
- Kensek, K.M. Integration of Environmental Sensors with BIM: Case Studies Using Arduino, Dynamo, and the Revit API. Inf. De La Constr. 2014, 66. [Google Scholar] [CrossRef]
- Liu, Q.; Qiao, Z.; Lv, Y. PyVT: A Python-Based Open-Source Software for Visualization and Graphic Analysis of Fluid Dynamics Datasets. Aerosp. Sci. Technol. 2021, 117, 106961. [Google Scholar] [CrossRef]
- Singh, S.; Verma, S.; Kumar, S.; Kumar Singh, S. Home Automation Using Node MCU, Firebase & IOT. Int. J. Sci. Res. Rev. 2019, 7, 1289–1294. [Google Scholar]
- Hunter, J.; Dale, D.; Firing, E.; Droettboom, M. Matplotlib: Visualization with Python. Available online: https://matplotlib.org (accessed on 2 July 2023).
- Sukmana, Y.; Rosmansyah, Y. The Use of Cloud Firestore for Handling Real-Time Data Updates: An Empirical Study of Gamified Online Quiz. In Proceedings of the 2021 2nd International Conference on Electronics, Communications and Information Technology, CECIT 2021, Sanya, China, 27 December 2021. [Google Scholar]
- Inoue, F.; Ohmoto, E. High Accuracy Position Marking System Applying Mobile Robot in Construction Site. J. Robot. Mechatron. 2012, 24, 985–991. [Google Scholar] [CrossRef]
- Trần Luân Pen Holder for Drawing Machine. Available online: https://www.thingiverse.com/thing:5505579 (accessed on 8 July 2023).
- Park, E.S.; Seo, H.C.; Lee, A.Y. Development of a Multi-Layer Marking Toolkit for Layout-Printing Automation at Construction Sites. Sensors 2022, 22, 4822. [Google Scholar] [CrossRef]
- Hlaing, K.M.; Nyaung, D.E. Electricity Billing System Using Ethereum and Firebase. In Proceedings of the 2019 International Conference on Advanced Information Technologies, ICAIT 2019, Yangon, Myanmar, 6–7 November 2019. [Google Scholar]
- Soffar, H. Robotics, Automation in Construction Uses, Advantages & Disadvantages|Science Online. Available online: https://www.online-sciences.com/robotics/robotics-automation-in-construction-uses-advantages-disadvantages/ (accessed on 24 July 2023).
- Faghihi, V.; Nejat, A.; Reinschmidt, K.F.; Kang, J.H. Automation in Construction Scheduling: A Review of the Literature. Int. J. Adv. Manuf. Technol. 2015, 81, 1845–1856. [Google Scholar] [CrossRef]
- Park, J.K.; Lee, K.W. Efficiency Analysis of Construction Automation Using 3D Geospatial Information. Sens. Mater. 2022, 34, 415–425. [Google Scholar] [CrossRef]
- Šlajpah, S.; Munih, M.; Mihelj, M. Mobile Robot System for Selective Asparagus Harvesting. Agronomy 2023, 13, 1766. [Google Scholar] [CrossRef]
- Sepasgozar, S.M.E.; Khan, A.A.; Smith, K.; Romero, J.G.; Shen, X.; Shirowzhan, S.; Li, H.; Tahmasebinia, F. BIM and Digital Twin for Developing Convergence Technologies as Future of Digital Construction. Buildings 2023, 13, 441. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Accuracy | Time | Degree of Automation | Weight | BIM Integration |
|---|---|---|---|---|---|
| Current Study | 15 mm | 8 s | Automated | 4 Kg | Yes |
| System Presented by Jensfelt et al. [17] | 28 mm | 33 s | Semi-Automated | Unknown | No |
| System Presented by Tsuruta et al. [20] | 2.3 mm | 98 s | Semi-Automated | 17 Kg | No |
| System Presented by Lee et al. [36] | Unknown | Unknown | Manual | Unknown | No |
| System Presented by Kitahara et al. [19] | <1 mm | Unknown | Manual | 56 Kg | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, F.; Ahmed, S.; Amin, F.; Qayyum, S.; Ullah, F. Integrating BIM–IoT and Autonomous Mobile Robots for Construction Site Layout Printing. Buildings 2023, 13, 2212. https://doi.org/10.3390/buildings13092212
Iqbal F, Ahmed S, Amin F, Qayyum S, Ullah F. Integrating BIM–IoT and Autonomous Mobile Robots for Construction Site Layout Printing. Buildings. 2023; 13(9):2212. https://doi.org/10.3390/buildings13092212
Chicago/Turabian StyleIqbal, Fahad, Shiraz Ahmed, Fayiz Amin, Siddra Qayyum, and Fahim Ullah. 2023. "Integrating BIM–IoT and Autonomous Mobile Robots for Construction Site Layout Printing" Buildings 13, no. 9: 2212. https://doi.org/10.3390/buildings13092212
APA StyleIqbal, F., Ahmed, S., Amin, F., Qayyum, S., & Ullah, F. (2023). Integrating BIM–IoT and Autonomous Mobile Robots for Construction Site Layout Printing. Buildings, 13(9), 2212. https://doi.org/10.3390/buildings13092212