
A Novel Dual Self-Centering Friction Damper for Seismic Responses Control of Steel Frame

Abstract
:1. Introduction
2. Design of D-SCFD
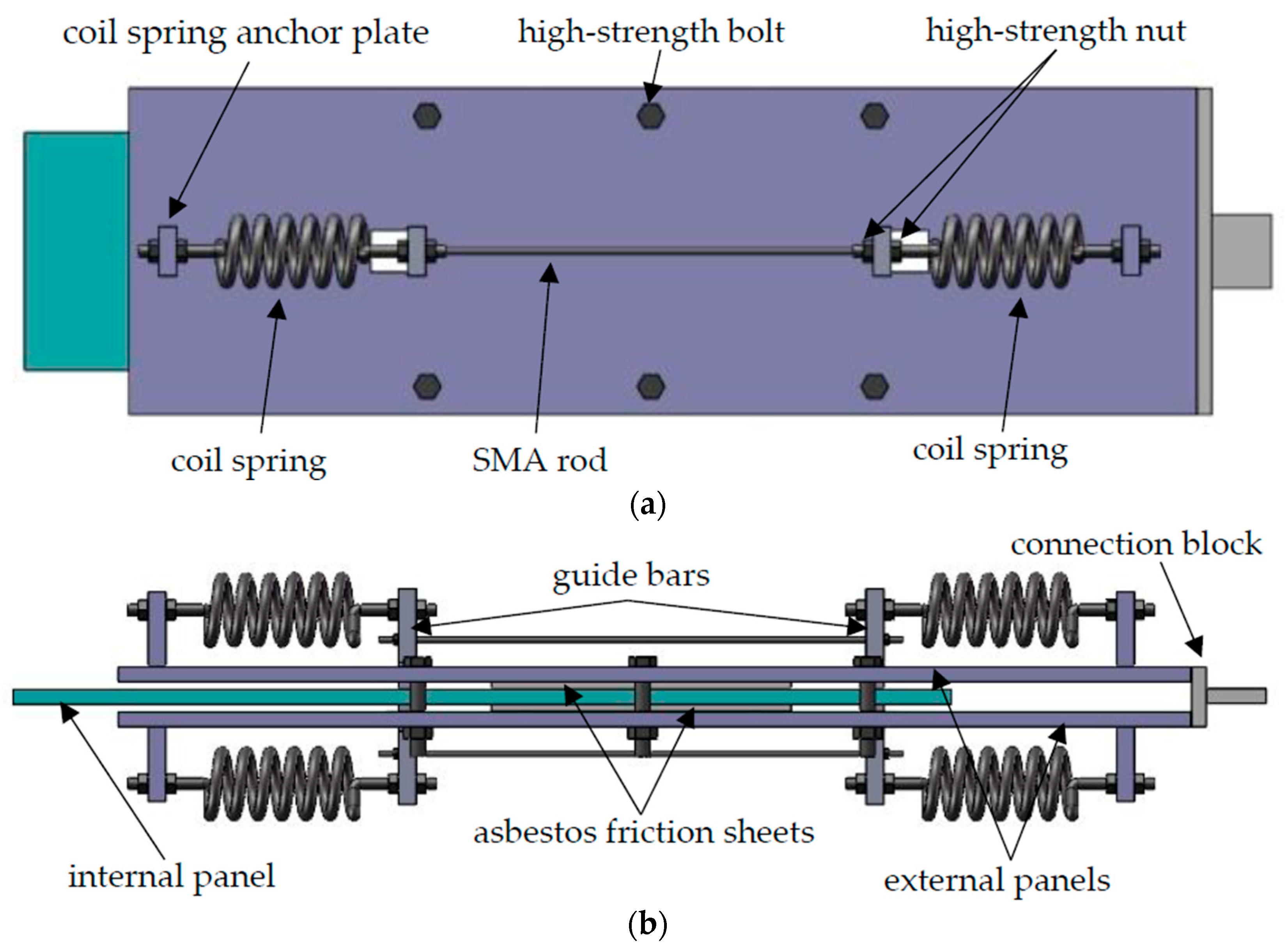
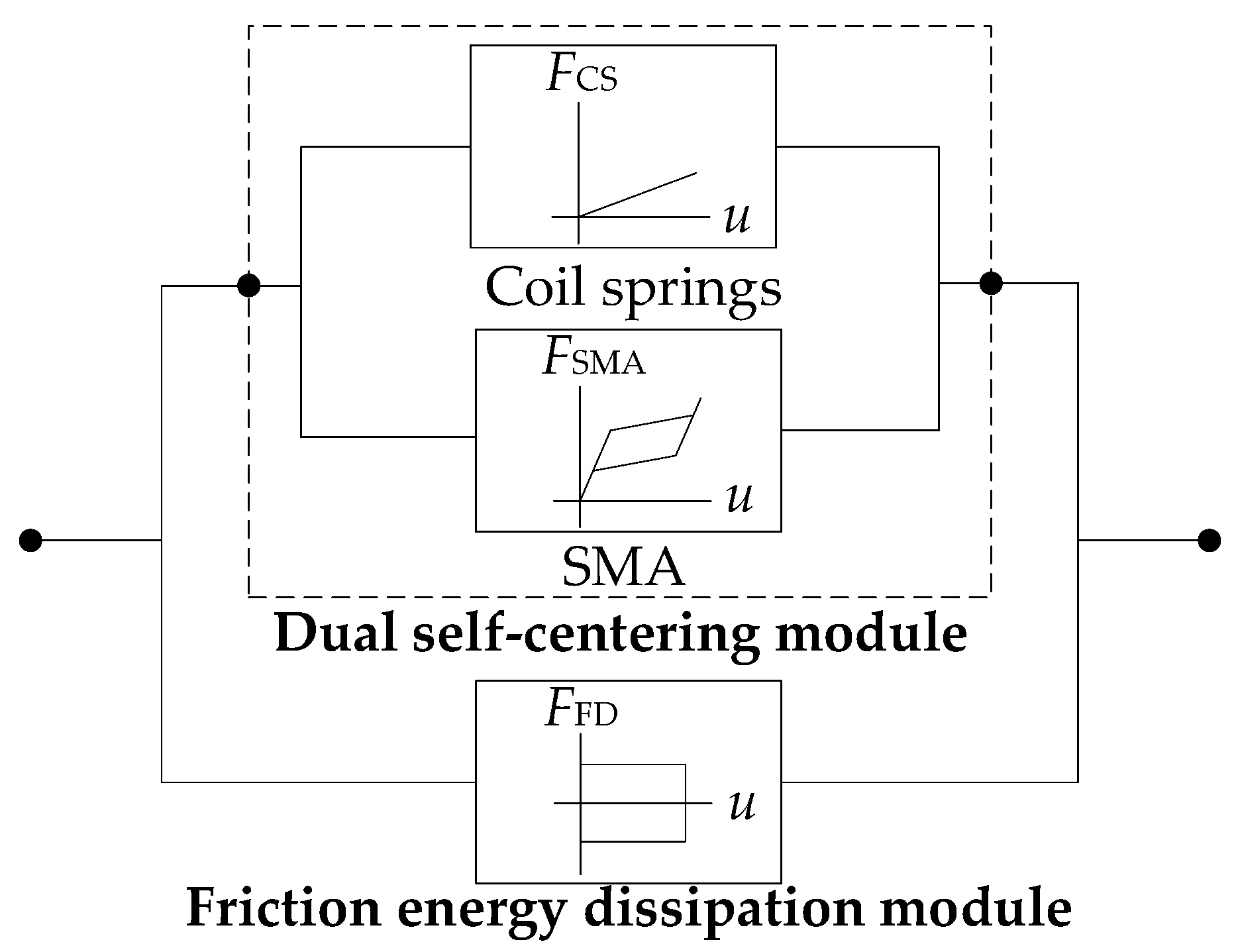
2.1. Configuration of D-SCFD
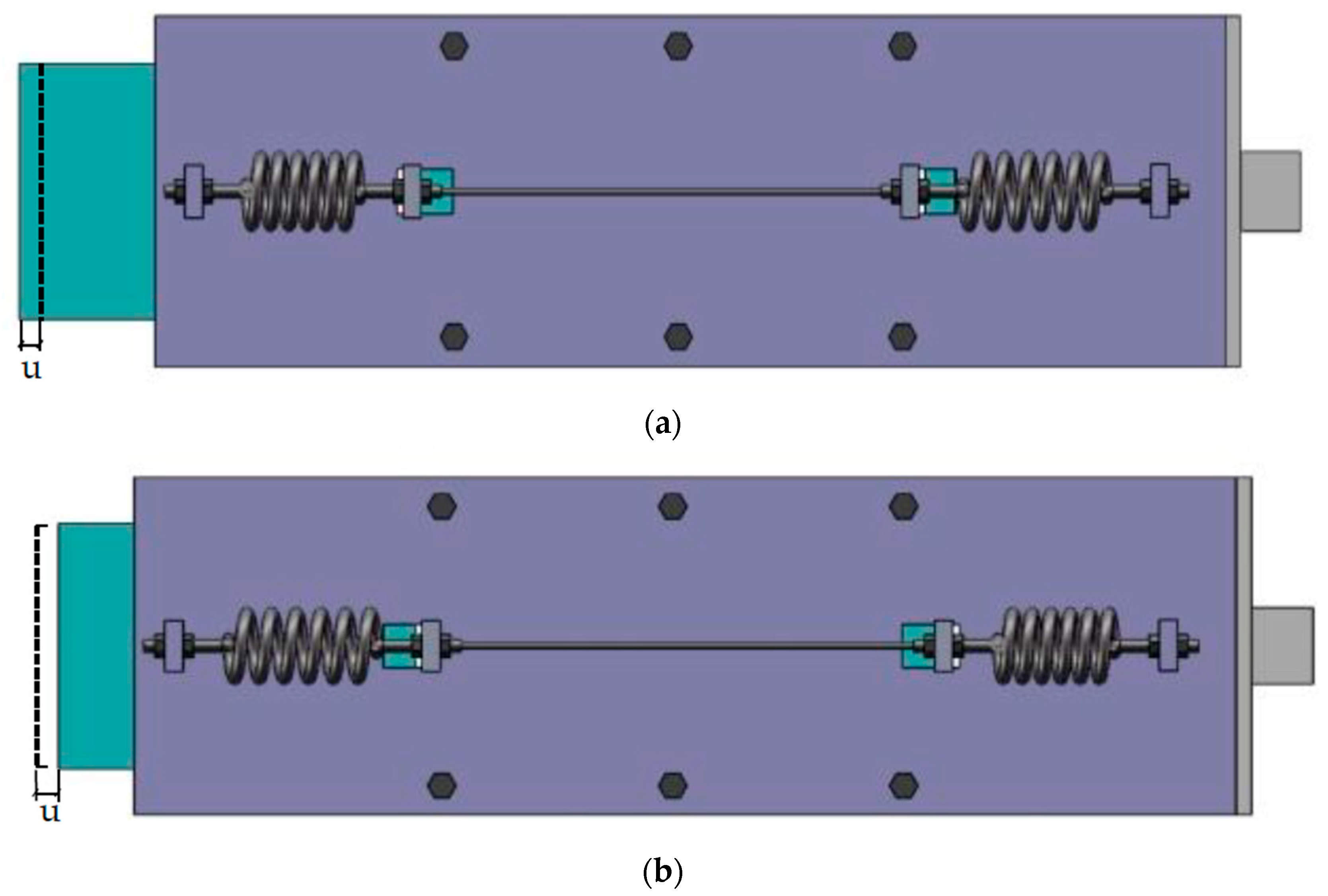
2.2. Working Principle of D-SCFD
3. Test
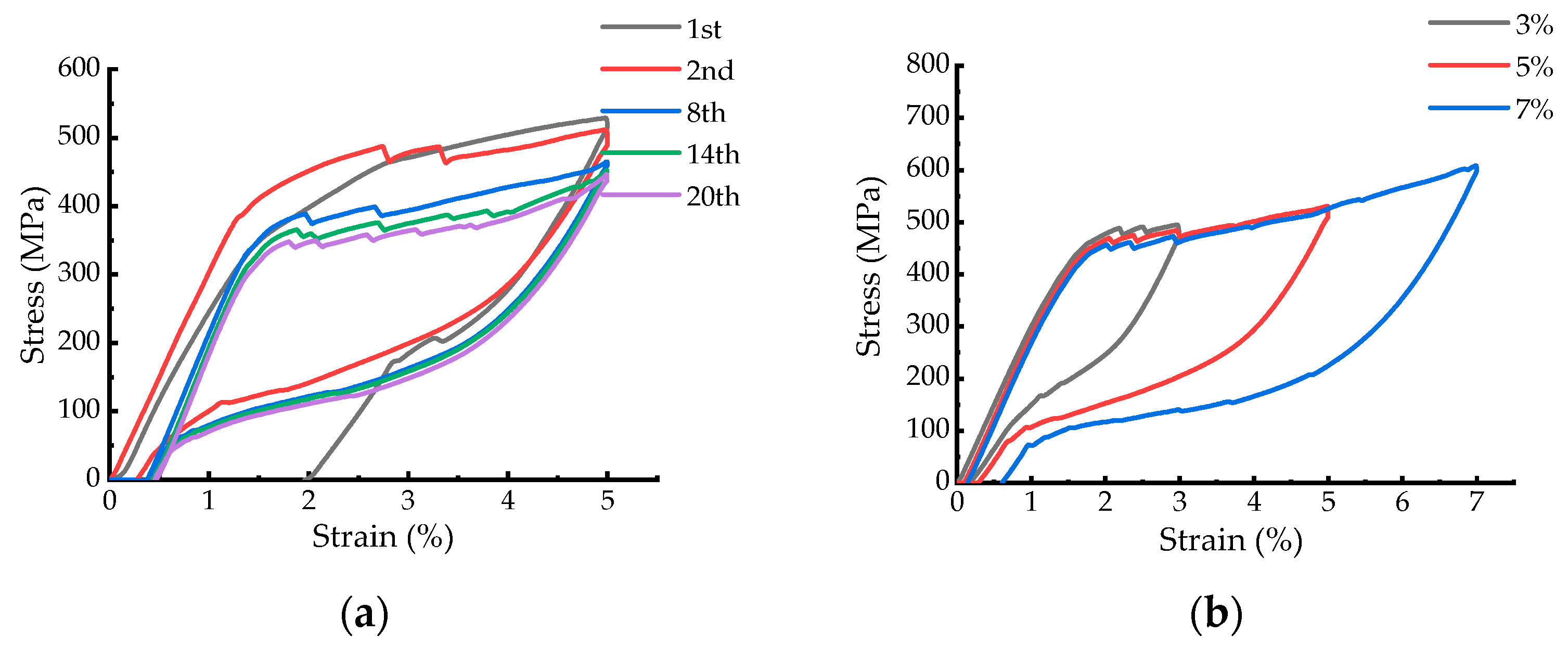
3.1. Tensile Test of SMA
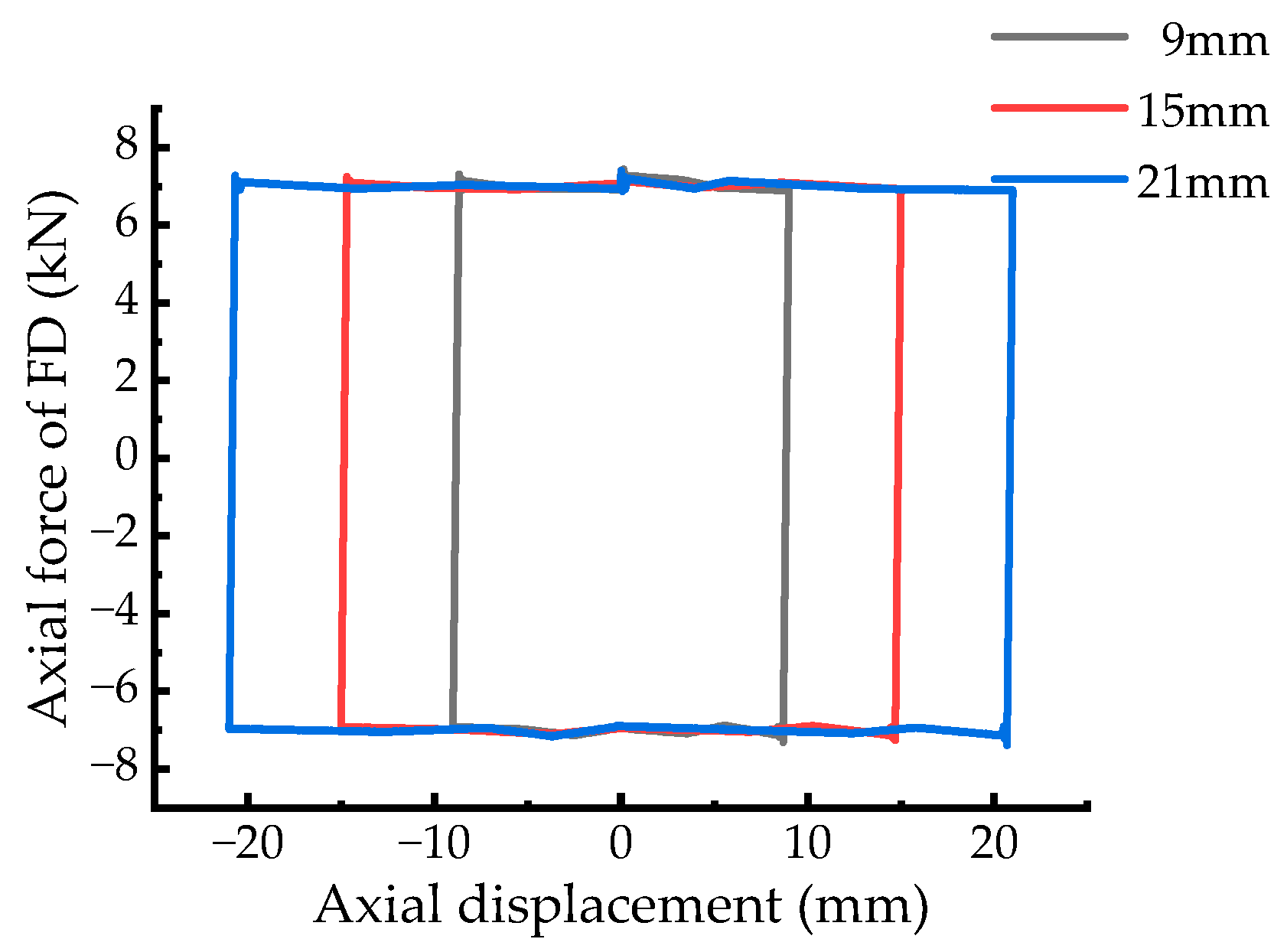
3.2. Mechanical Test of D-SCFD
4. Simplified Mechanical Model and Parameter Analysis
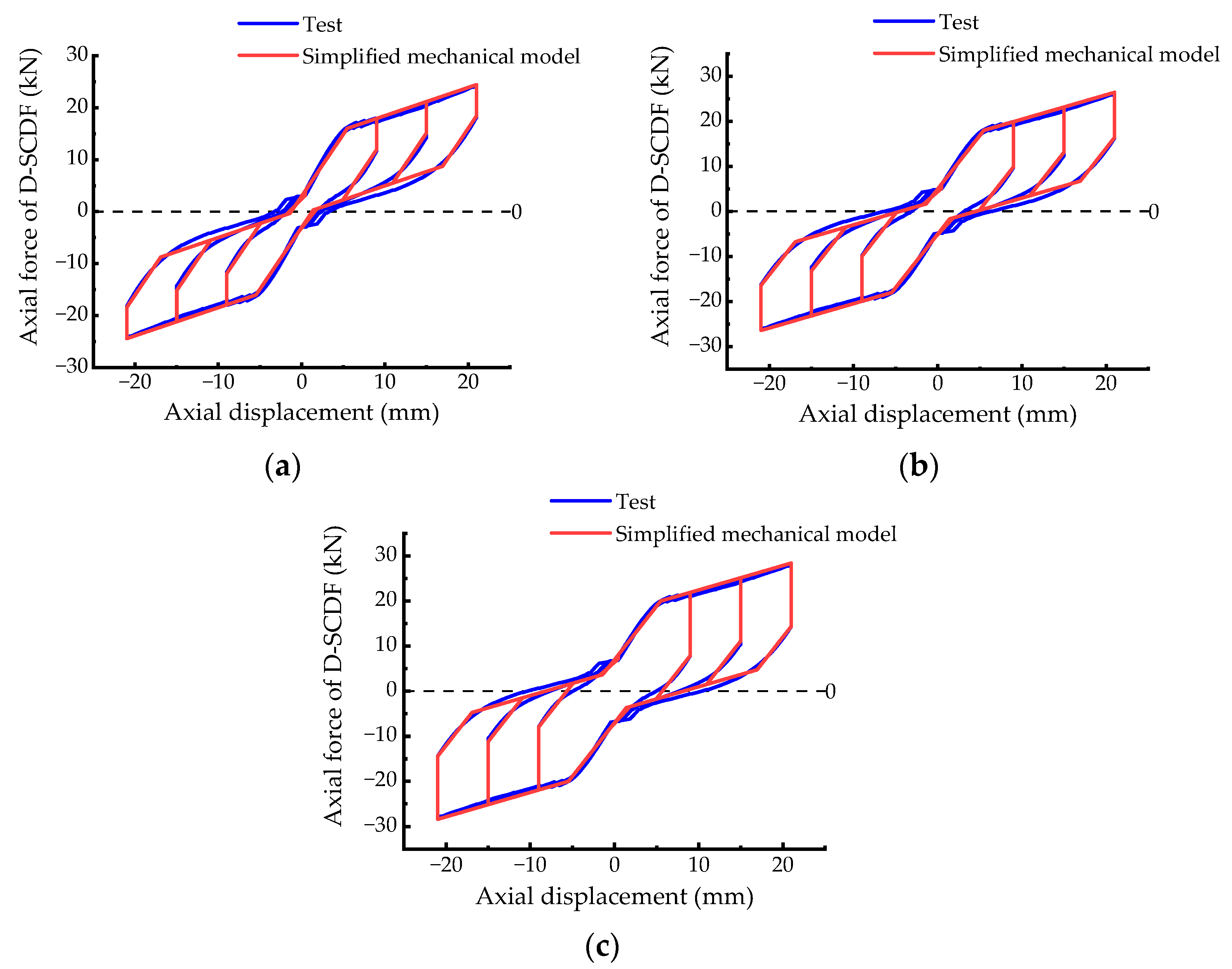
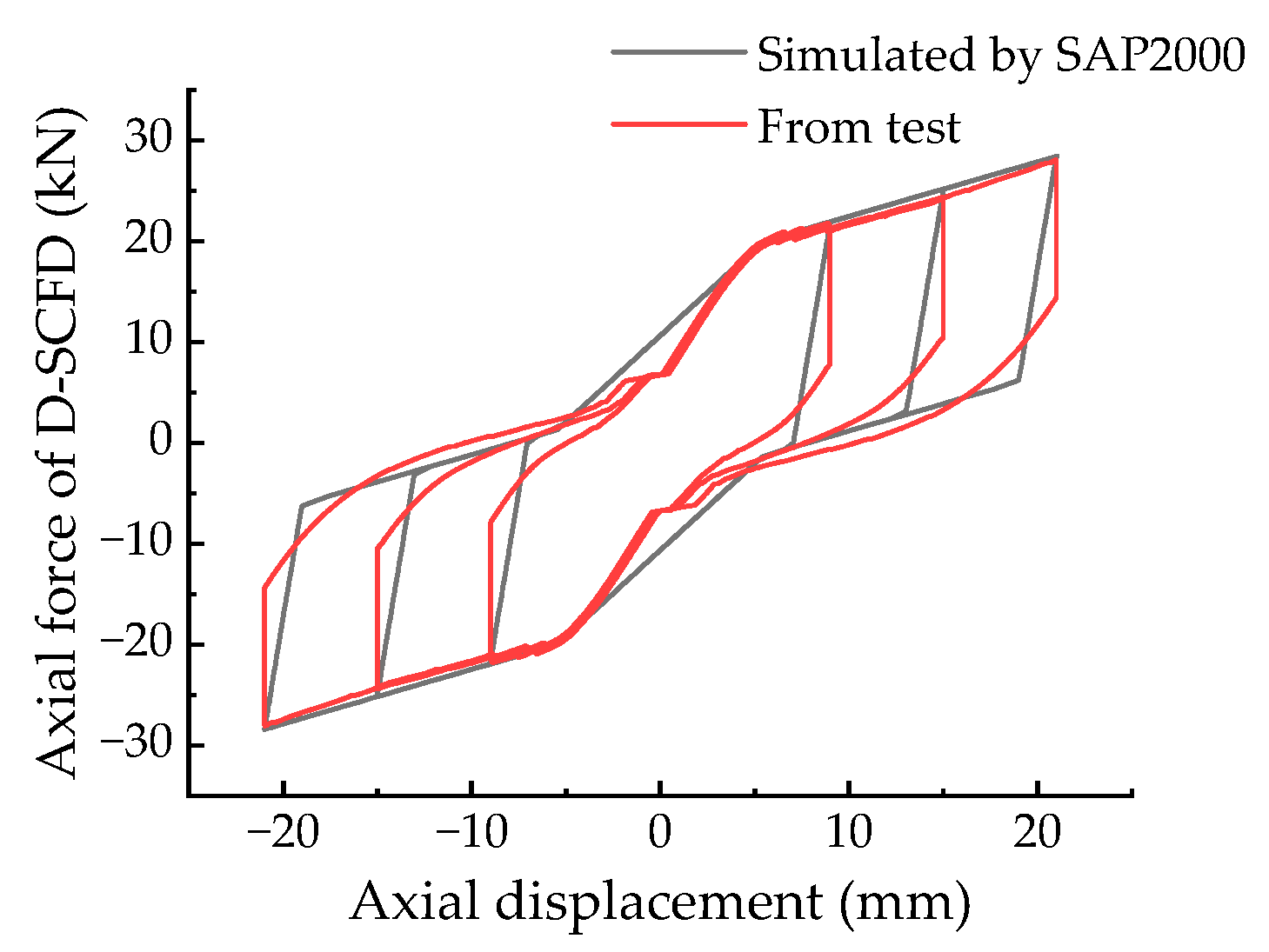
4.1. Verification of Simplified Mechanical Model
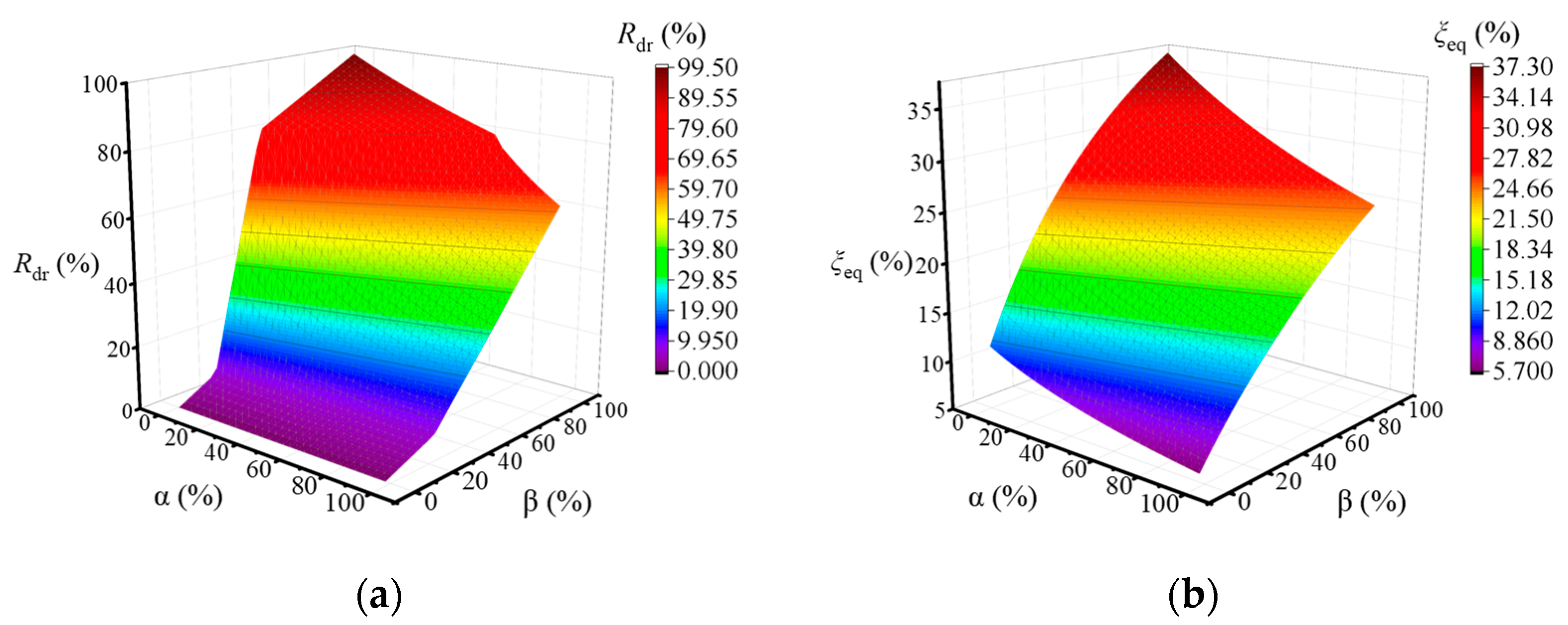
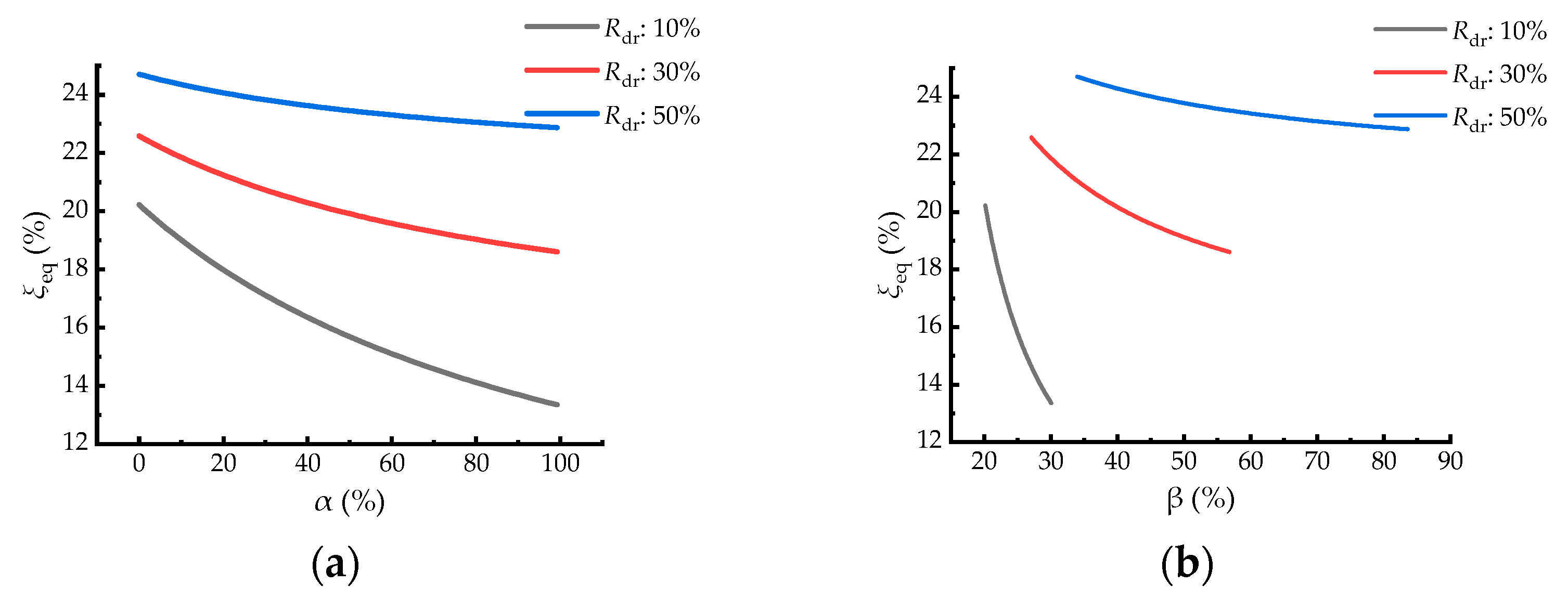
4.2. Parameter Analysis
5. Seismic Response Mitigation of Multi-Story SF
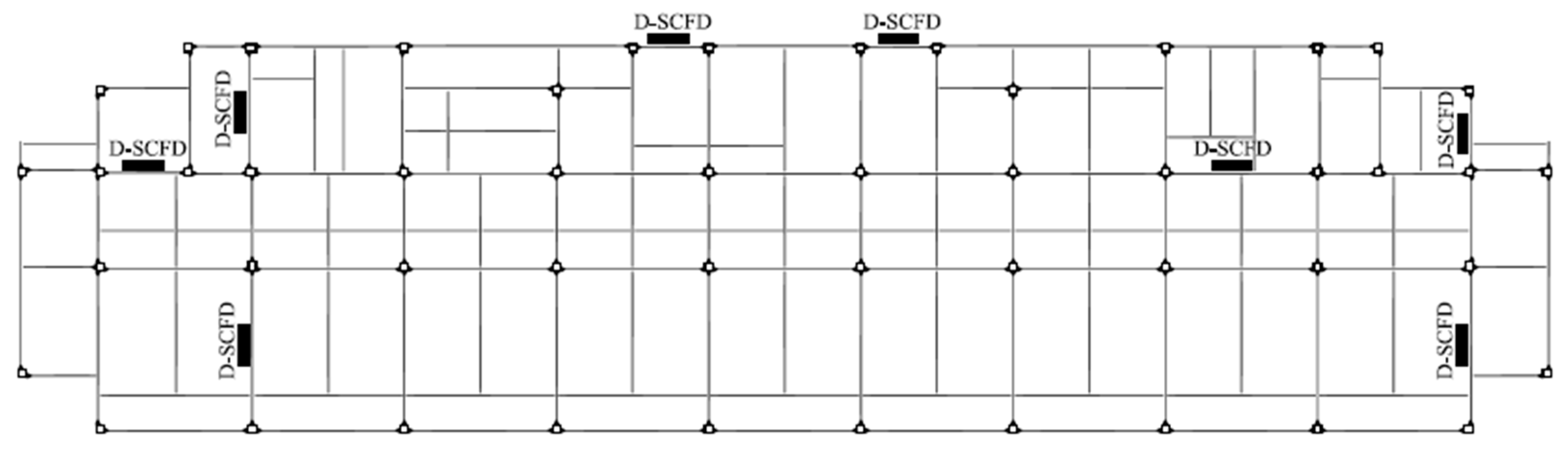
5.1. Overview of Structure Case
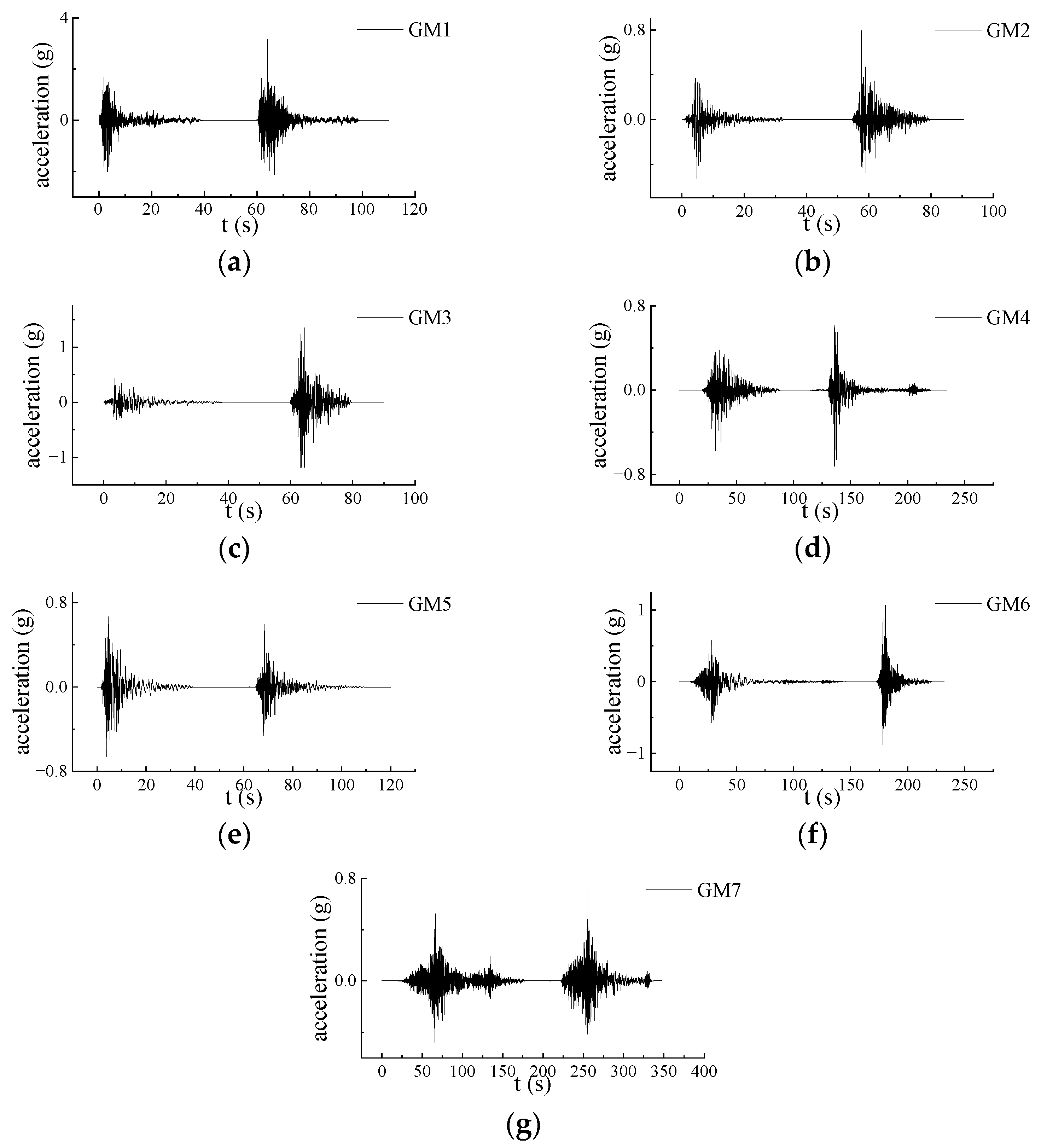
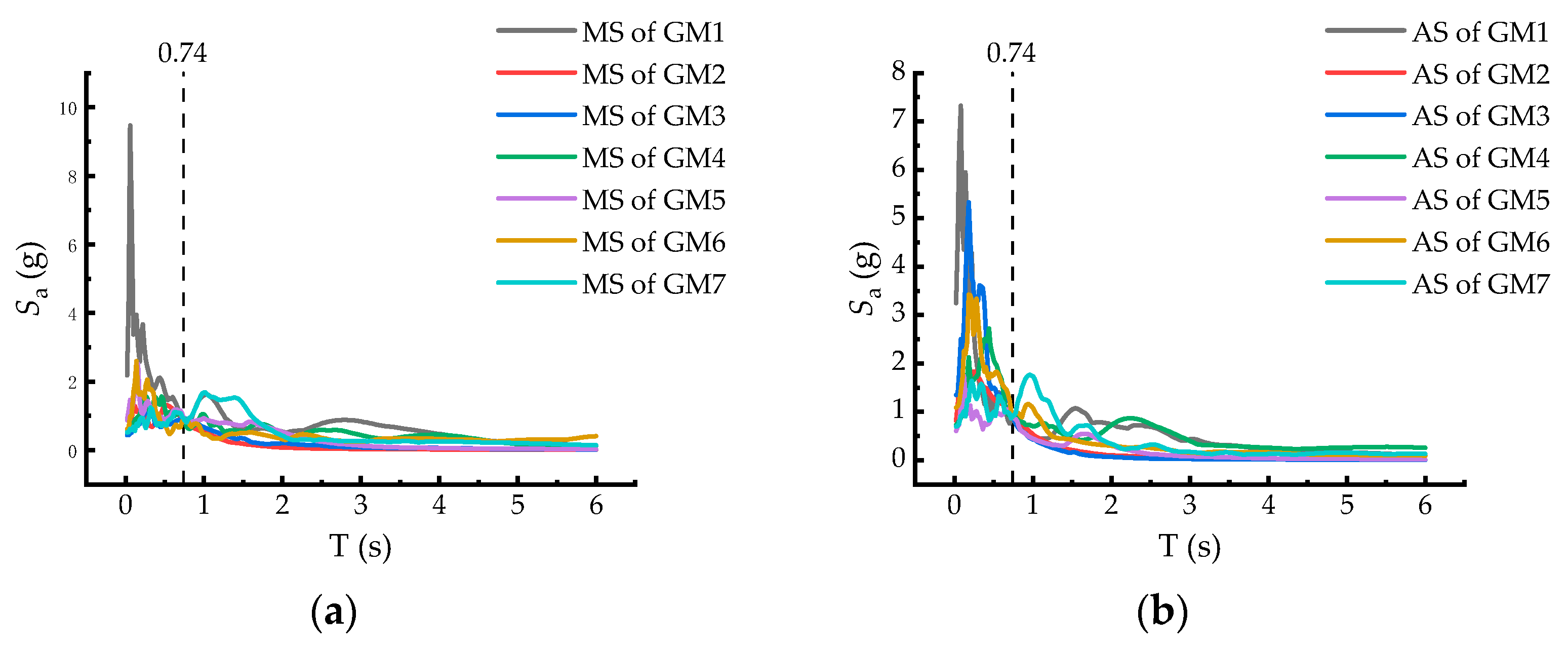
5.2. Ground Motion Inputs
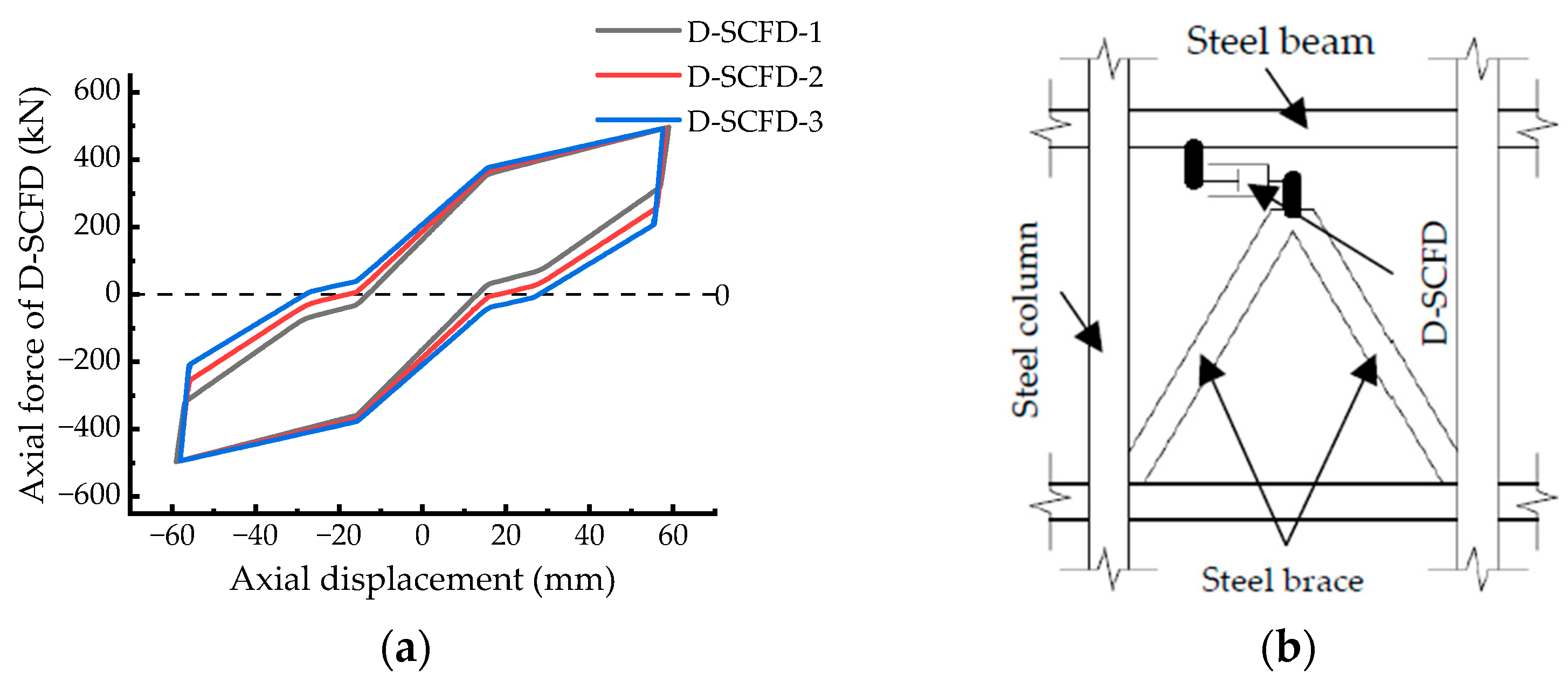
5.3. D-SCFD
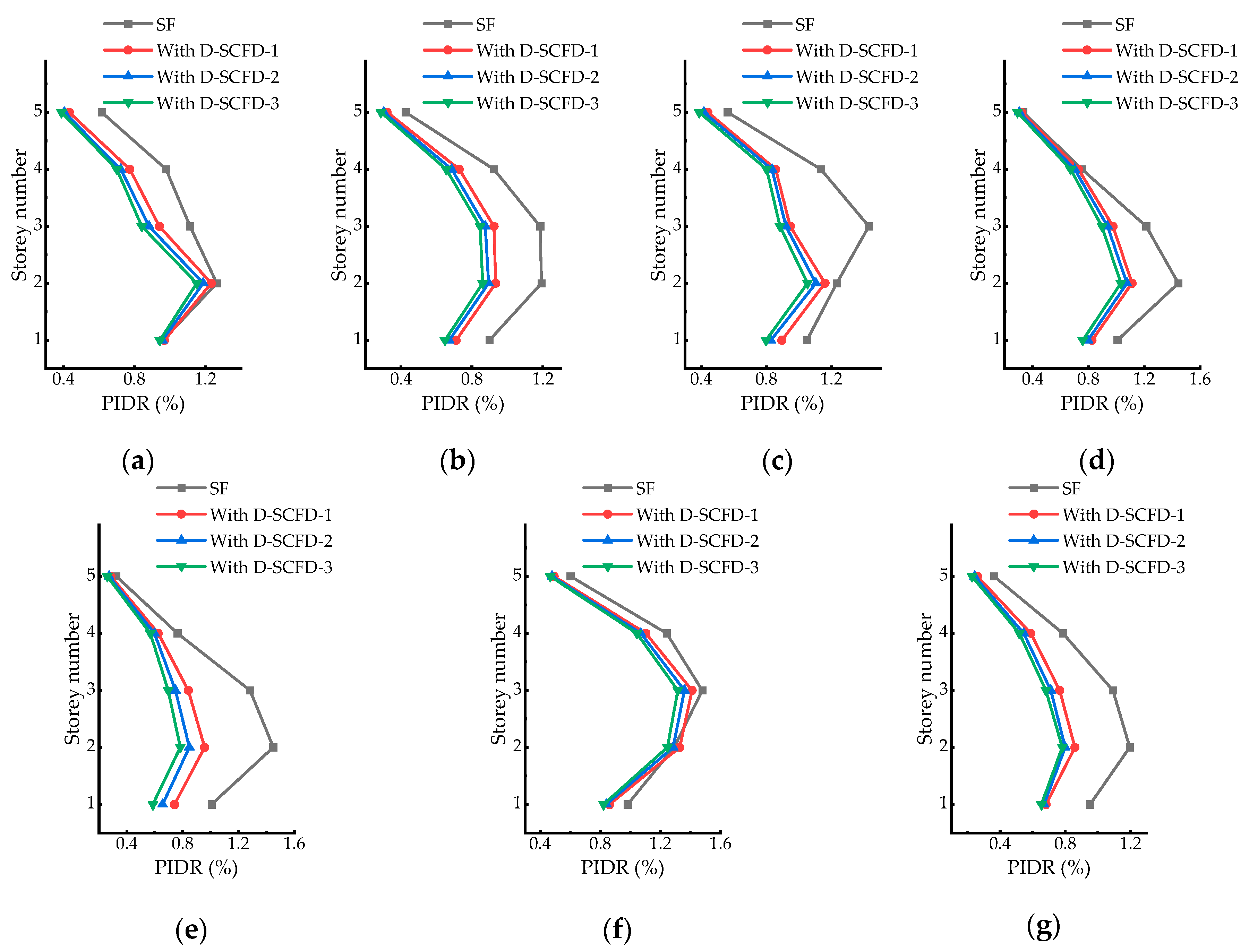
5.4. Mitigation of Seismic Responses
6. Conclusions
- The recentering and energy dissipation performances of D-SCFD were contradictory. It is necessary to define the reasonable relationship between the axial force provided by coil springs, SMA, and FD, which can make the D-SCFD give play to the ideal performance of recentering and energy dissipation.
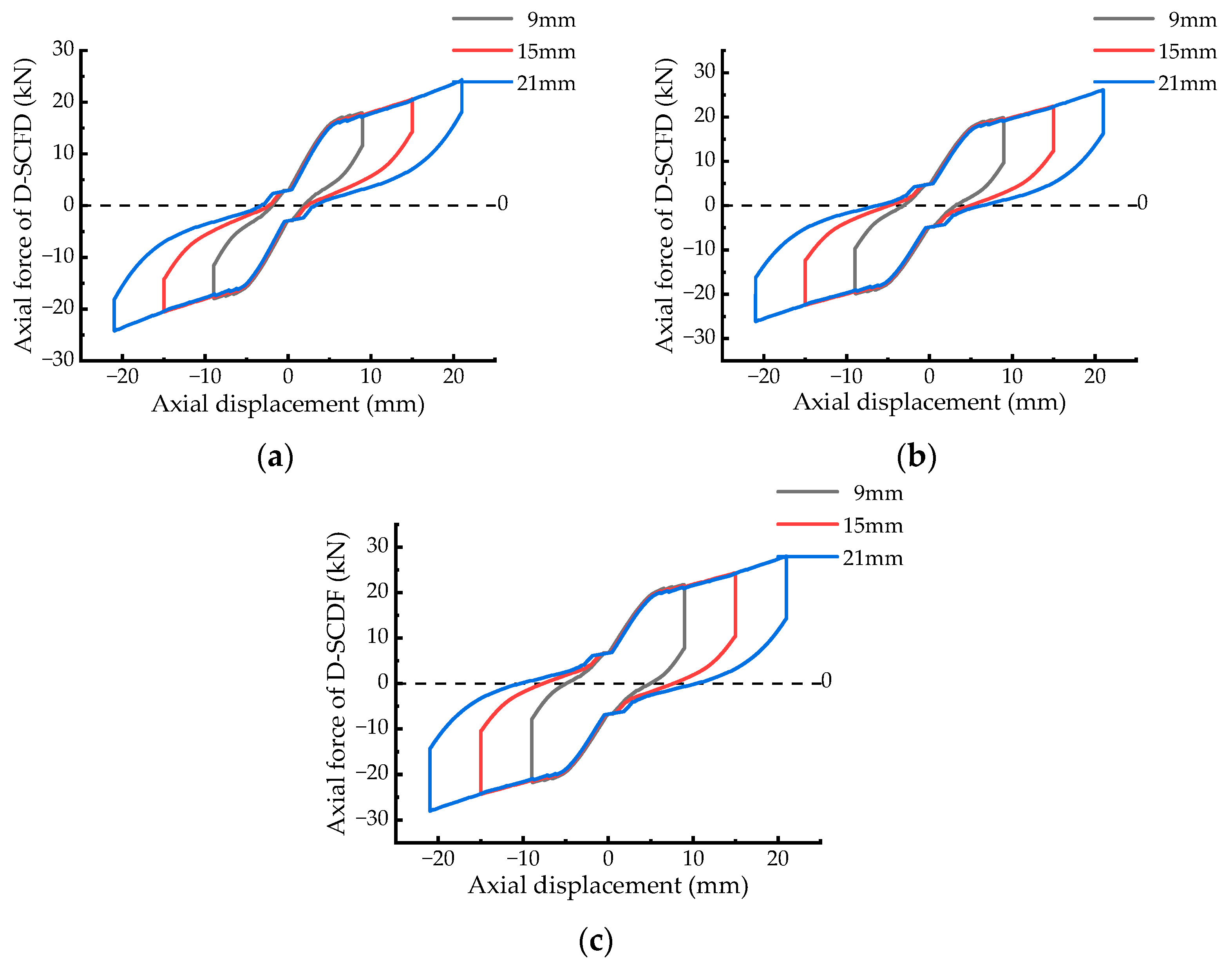
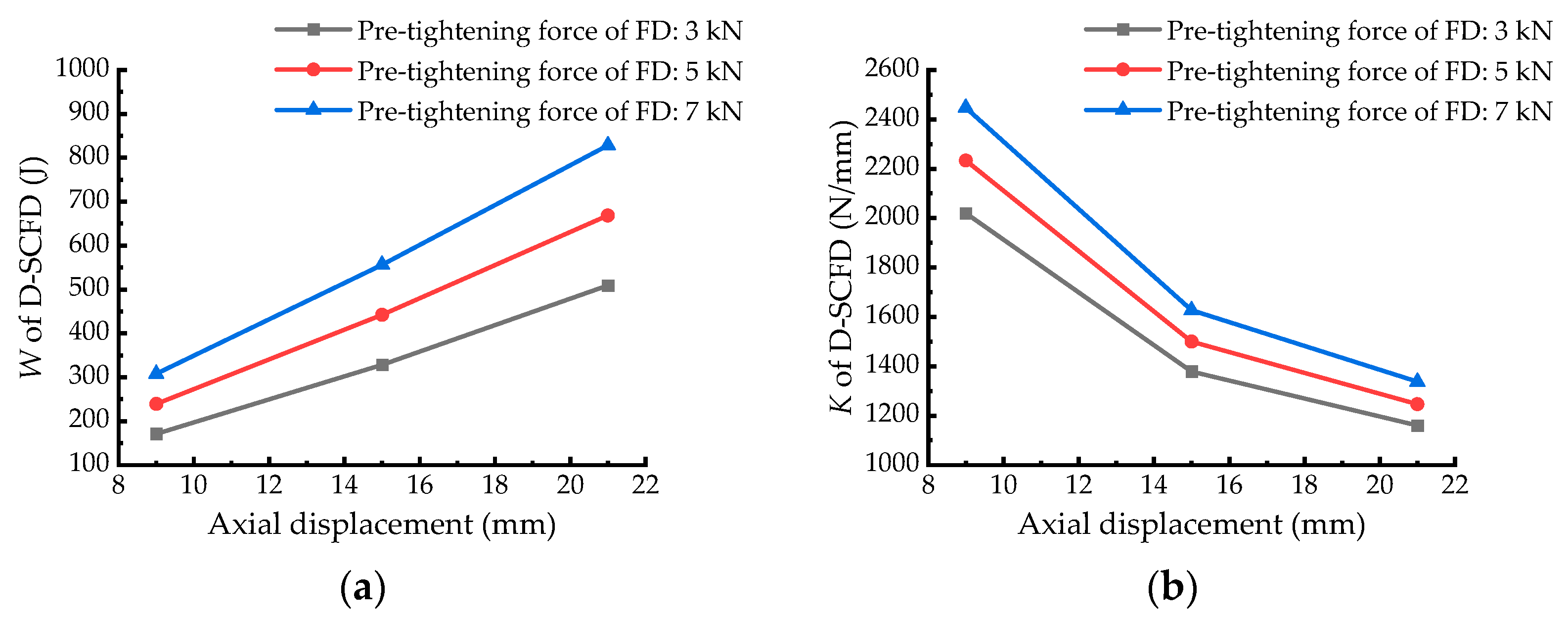
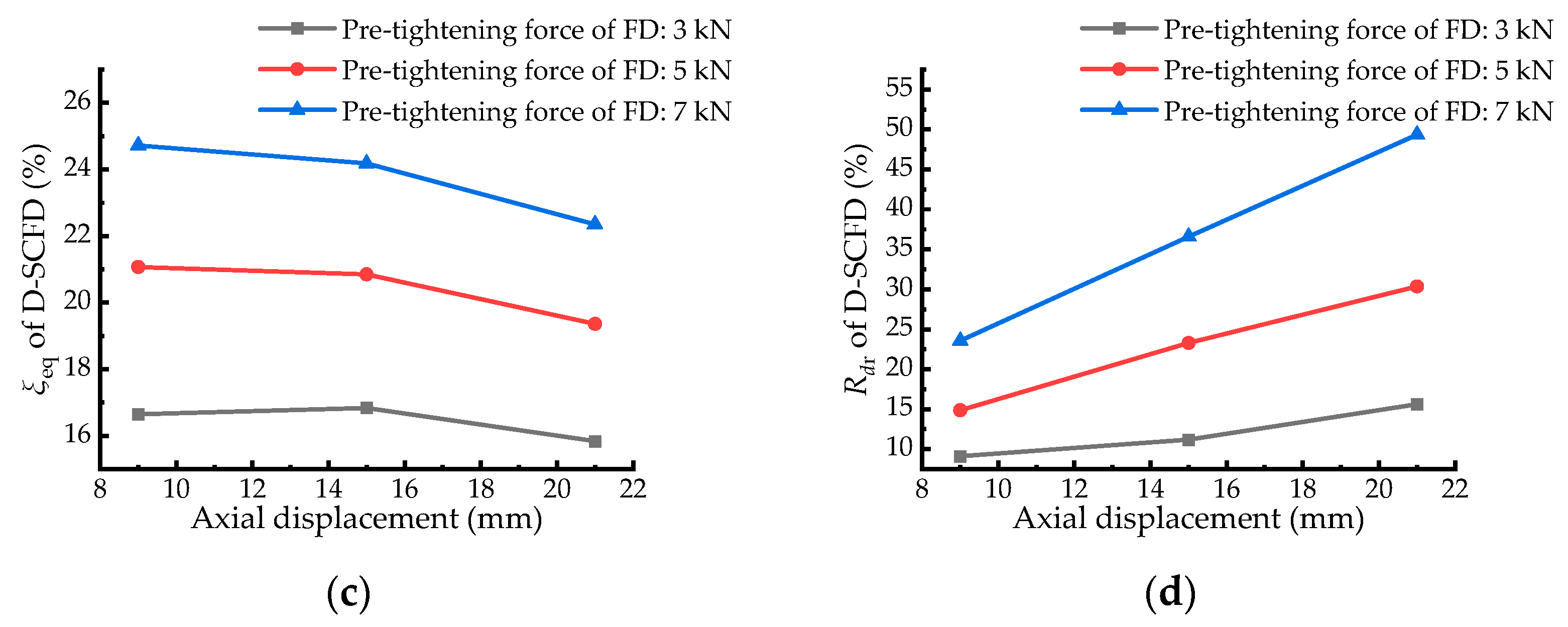
- After magnifying the axial force response of FD, the energy dissipation performance of D-SCFD increased, but the recentering performance decreased. Meanwhile, a reduction in the recentering performance was positively correlated with the loading displacement amplitude. After the martensitic transformation of SMA, the loading displacement amplitude had little effect on the energy dissipation performance of D-SCFD.
- The simplified mechanical model of D-SCFD, the theoretical index calculations of the performance of recentering, and energy dissipation could accurately describe the mechanical behaviors of D-SCFD. In the suggested model, the parameters are related to the mechanical properties of each component, which is beneficial to its serviceability. With the reduction in the recentering performance target and the increase in the axial force ratio of the coil springs, the decrease in the energy dissipation performance of D-SCFD would be slower.
- When the recentering performance of D-SCFD is required to be high, it is not appropriate to excessively increase the axial force ratio of the coil springs to avoid a rapid decline in the performance of energy dissipation. With the decrease in the recentering performance target, the proportion of axial force provided by the coil springs can be appropriately increased, thereby reducing the consumption of SMA.
- The simulations of D-SCFD utilizing SAP2000 were close to the test. Adjusting the Rdr to 50% from 10%, the section area of SMA decreased by 13.31% in D-SCFD with a α of 20%. Simultaneously, the control rate of the average peak inter-story drift ratio (APIDR) increased 7.48% in the story with the maximum APIDR. However, the maximum variation of average residual inter-story drift ratios (ARIDRs) only reached 0.008%. Therefore, when D-SCFD is used to mitigate seismic responses, the performance of recentering can be appropriately reduced.
- Compared to the existing self-centering damper-based SMA, the consumption of SMA in D-SCFD was less, which avoided the expensive cost. In the future, the combination of a dual self-centering pattern (D-SC) and other kinds of passive energy dissipation devices could be promising.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| SMA | Shape memory alloy |
| FD | Friction energy dissipation device |
| D-SCFD | Dual self-centering friction damper |
| BRB | Buckling restrained brace |
| MYD | Metallic yielding damper |
| MS-AS | Mainshock–aftershock sequence |
| RC | Reinforced concrete |
| D-SC | Dual self-centering |
| SF | Steel frame |
| W | Dissipated energy |
| K | Secant stiffness |
| ξeq | Equivalent viscous damping |
| Rdr | Rate of residual deformation |
| FD-SCFD | Axial force response of D-SCFD |
| kCS | Total stiffness of the coil springs |
| u | Axial deformation of D-SCFD |
| t | Time |
| P | Pre-tightening force of FD |
| μ | Sliding friction coefficient of FD |
| sgn(x) | Symbolic function |
| FSMA | Axial force of the SMA rods |
| ε(x) | Step function |
| Axial force responses of SMA rods during loading | |
| Axial force responses of SMA rods during unloading | |
| kSMA,1 | Linear stiffness of SMA rods before martensitic transformation |
| kSMA,2 | Linear stiffness of SMA rods after martensitic transformation |
| uMs | Axial deformation of SMA rods at the start of martensitic transformation |
| FMs | Axial force of SMA rods at the start of martensitic transformation |
| uMf | Axial deformation of SMA rods at the end of martensitic transformation |
| uAf | Axial deformation of SMA rods at the end of the reverse martensitic transformation |
| FAf | Axial force of SMA rods at the end of the reverse martensitic transformation |
| Axial deformation of SMA rods at the beginning of unloading | |
| Axial force of SMA rods at the beginning of unloading | |
| Axial deformation of SMA rods at the beginning of the reverse martensitic transformation | |
| α | Ratio of the maximum axial force of the coil springs to that of SMA rods |
| β | Ratio of the maximum axial force of FD to that of SMA rods |
| Sa(T1, ξ) | Spectral acceleration corresponding to the first translational period of structure |
| PIDR | Peak inter-story drift ratio |
| APIDR | Average peak inter-story drift ratio |
| ARIDR | Average residual inter-story drift ratio |
| APFA | Average peak floor acceleration |
References
- Almajhali, K.Y.M. Review on passive energy dissipation devices and techniques of installation for high rise building structures. Structures 2023, 51, 1019–1029. [Google Scholar] [CrossRef]
- Divyah, N.; Prakash, R.; Srividhya, S.; Ajay Prakash, K. Control of vibrations in high-rise structures using base isolation technology. Mater. Today Proc. 2023. [CrossRef]
- Ilbeigi, S.; Jahanpour, J.; Farshidianfar, A. A novel scheme for nonlinear displacement-dependent dampers. Nonlinear Dyn. 2012, 70, 421–434. [Google Scholar] [CrossRef]
- Hussain, H.; Kim, D.-K.; Zhao, W. Advancements and Future Prospects of Buckling Restrained Braces for Corrosive-Environments: A Comprehensive Literature Review. Buildings 2023, 13, 2156. [Google Scholar] [CrossRef]
- Amiri, J.V.; Navayinia, B.; Navaei, S. Evaluation of performance of eccentric braced frame with friction damper. Struct. Eng. Mech. 2011, 39, 717–732. [Google Scholar] [CrossRef]
- Wang, J.; Men, J.; Zhang, Q.; Fan, D.; Zhang, Z.; Huang, C.-H. Seismic performance evaluation of a novel shape-optimized composite metallic yielding damper. Eng. Struct. 2022, 268, 114714. [Google Scholar] [CrossRef]
- Sabelli, R.; Mahin, S.; Chang, C. Seismic demands on steel braced frame buildings with buckling-restrained braces. Eng. Struct. 2003, 25, 655–666. [Google Scholar] [CrossRef]
- Xu, G.; Guo, T.; Li, A.; Wang, S.; Zhang, R.; Zhu, R.; Xu, J. Review on self-centering damper for seismic resilient building structures. Structures 2023, 54, 58–77. [Google Scholar] [CrossRef]
- Christopoulos, C.; Tremblay, R.; Kim, H.J.; Lacerte, M. Self-centering energy dissipative bracing system for the seismic resistance of structures: Development and validation. J. Struct. Eng. 2008, 134, 96–107. [Google Scholar] [CrossRef]
- Erochko, J.; Christopoulos, C.; Tremblay, R.; Kim, H.-J. Shake table testing and numerical simulation of a self-centering energy dissipative braced frame. Earthq. Eng. Struct. Dyn. 2013, 42, 1617–1635. [Google Scholar] [CrossRef]
- Erochko, J.; Christopoulos, C.; Tremblay, R. Design and Testing of an Enhanced-Elongation Telescoping Self-Centering Energy-Dissipative Brace. J. Struct. Eng. 2015, 141, 04014163. [Google Scholar] [CrossRef]
- Chou, C.-C.; Chung, P.-T. Development of cross-anchored dual-core self-centering braces for seismic resistance. J. Constr. Steel Res. 2014, 101, 19–32. [Google Scholar] [CrossRef]
- Chou, C.-C.; Chen, Y.-C. Development of Steel Dual-Core Self-Centering Braces: Quasi-Static Cyclic Tests and Finite Element Analyses. Earthq. Spectra 2015, 31, 247–272. [Google Scholar] [CrossRef]
- Chou, C.-C.; Tsai, W.-J.; Chung, P.-T. Development and validation tests of a dual-core self-centering sandwiched buckling-restrained brace (SC-SBRB) for seismic resistance. Eng. Struct. 2016, 121, 30–41. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, Z.; Ge, H.; Yao, J.; Xie, Q. Experimental validation and numerical simulation of a dual-self-centering variable friction braced frame under strong ground motions. J. Build. Eng. 2022, 56, 104761. [Google Scholar] [CrossRef]
- Xie, Q.; Zhou, Z.; Meng, S.-P. Experimental investigation of the hysteretic performance of self-centering buckling-restrained braces with friction fuses. Eng. Struct. 2020, 203, 109865. [Google Scholar] [CrossRef]
- Xu, L.-H.; Fan, X.-W.; Li, Z.-X. Cyclic behavior and failure mechanism of self-centering energy dissipation braces with pre-pressed combination disc springs. Earthq. Eng. Struct. Dyn. 2017, 46, 1065–1080. [Google Scholar] [CrossRef]
- Xu, L.; Fan, X.; Li, Z. Experimental behavior and analysis of self-centering steel brace with pre-pressed disc springs. J. Constr. Steel Res. 2017, 139, 363–373. [Google Scholar] [CrossRef]
- Fan, X.-W.; Xu, L.-H.; Li, Z.-X. Behaviors Comparisons and Prediction of Pre-Pressed Spring Self-Centering Energy Dissipation Braces. Int. J. Struct. Stab. Dyn. 2018, 18, 1840006. [Google Scholar] [CrossRef]
- Filiatrault, A.; Tremblay, R.; Kar, R. Performance evaluation of friction spring seismic damper. J. Struct. Eng.-ASCE 2000, 126, 491–499. [Google Scholar] [CrossRef]
- Khoo, H.-H.; Clifton, C.; Butterworth, J.; MacRae, G.; Gledhill, S.; Sidwell, G. Development of the self-centering Sliding Hinge Joint with friction ring springs. J. Constr. Steel Res. 2012, 78, 201–211. [Google Scholar] [CrossRef]
- Khoo, H.-H.; Clifton, C.; Butterworth, J.; MacRae, G. Experimental Study of Full-Scale Self-Centering Sliding Hinge Joint Connections with Friction Ring Springs. J. Earthq. Eng. 2013, 17, 972–997. [Google Scholar] [CrossRef]
- Dolce, M.; Cardone, D.; Marnetto, R. Implementation and testing of passive control devices based on shape memory alloys. Earthq. Eng. Struct. Dyn. 2000, 29, 945–968. [Google Scholar] [CrossRef]
- Qian, H.; Li, H.; Song, G.; Guo, W. Recentering Shape Memory Alloy Passive Damper for Structural Vibration Control. Math. Probl. Eng. 2013, 2013, 963530. [Google Scholar] [CrossRef]
- Shi, F.; Saygili, G.; Ozbulut, O.E. Probabilistic seismic performance evaluation of SMA-braced steel frames considering SMA brace failure. Bull. Earthq. Eng. 2018, 16, 5937–5962. [Google Scholar] [CrossRef]
- Shi, F.; Ozbulut, O.E.; Zhou, Y. Influence of shape memory alloy brace design parameters on seismic performance of self-centering steel frame buildings. Struct. Control Health Monit. 2020, 27, e2462. [Google Scholar] [CrossRef]
- Shi, F.; Zhou, Y.; Ozbulut, O.E.; Cao, S. Development and experimental validation of anchorage systems for shape memory alloy cables. Eng. Struct. 2021, 228, 111611. [Google Scholar] [CrossRef]
- Shi, F.; Zhou, Y.; Ozbulut, O.E.; Ren, F. Hysteretic response and failure behavior of an SMA cable-based self-centering brace. Struct. Control Health Monit. 2022, 29, e2847. [Google Scholar] [CrossRef]
- Rayegani, A.; Soureshjani, O.K.; Alaee, S.A.M.; Mualla, I.H.; Nemati, F. Seismic Performance of Buildings Equipped with Four-Joint Rotational Friction Dampers in Mainshock–Aftershock Sequences. J. Struct. Eng. 2023, 150, 04023235. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Wang, J.; Yu, H.; Ma, K.; Zhang, X.; Ji, W.; Li, R. Experimental investigation on the seismic behavior of a novel self-centering friction damper. J. Build. Eng. 2023, 76, 107384. [Google Scholar] [CrossRef]
- Chen, J.; Wang, W.; Fang, C. Manufacturing, testing and simulation of novel SMA-based variable friction dampers with enhanced deformability. J. Build. Eng. 2022, 45, 103513. [Google Scholar] [CrossRef]
- Qiu, C.; Liu, J.; Du, X. Cyclic behavior of SMA slip friction damper. Eng. Struct. 2022, 250, 113407. [Google Scholar] [CrossRef]
- Zheng, W.Z.; Tan, P.; Li, J.; Wang, H.; Liu, Y.H.; Xian, Z.B. Superelastic pendulum isolator with multi-stage variable curvature for seismic resilience enhancement of cold-regional bridges. Eng. Struct. 2023, 284, 115960. [Google Scholar] [CrossRef]
- Zheng, W.Z.; Tan, P.; Zhang, Z.H.; Wang, H.; Sun, Z. Damping enhanced novel re-centering seismic isolator incorporating superelastic SMA for response control of bridges under near-fault earthquakes. Smart Mater. Struct. 2022, 31, 065015. [Google Scholar] [CrossRef]
- Hussain, E.; Kalaycioglu, S.; Milliner, C.W.D.; Cakir, Z. Preconditioning the 2023 Kahramanmaras (Turkiye) earthquake disaster. Nat. Rev. Earth Environ. 2023, 4, 287–289. [Google Scholar] [CrossRef]
- Lu, X.; Cheng, Q.; Xu, Z.; Xiong, C. Regional seismic-damage prediction of buildings under mainshock-aftershock sequence. Front. Eng. Manag. 2021, 8, 122–134. [Google Scholar] [CrossRef]
- Raghunandan, M.; Liel, A.B.; Luco, N. Aftershock collapse vulnerability assessment of reinforced concrete frame structures. Earthq. Eng. Struct. Dyn. 2015, 44, 419–439. [Google Scholar] [CrossRef]
- Wen, W.; Ji, D.; Zhai, C.; Li, X.; Sun, P. Damage spectra of the mainshock-aftershock ground motions at soft soil sites. Soil Dyn. Earthq. Eng. 2018, 115, 815–825. [Google Scholar] [CrossRef]
- Yu, X.-H.; Li, S.; Lu, D.-G.; Tao, J. Collapse Capacity of Inelastic Single-Degree-of-Freedom Systems Subjected to Mainshock-Aftershock Earthquake Sequences. J. Earthq. Eng. 2020, 24, 803–826. [Google Scholar] [CrossRef]
- Zhou, Z.; Xu, H.; Gardoni, P.; Lu, D.; Yu, X. Probabilistic demand models and fragilities for reinforced concrete frame structures subject to mainshock-aftershock sequences. Eng. Struct. 2021, 245, 112904. [Google Scholar] [CrossRef]
- Lagoudas, D.C.; Mayes, J.J.; Khan, M.M. Simplified shape memory alloy (SMA) material model for vibration isolation. In Proceedings of the Smart Structures and Materials 2001 Conference, Newport Beach, CA, USA, 5–8 March 2001. [Google Scholar]
- Brinson, L.C. One-Dimensional Constitutive Behavior of Shape Memory Alloys: Thermomechanical Derivation with Non-Constant Material Functions and Redefined Martensite Internal Variable. J. Intell. Mater. Syst. Struct. 1993, 4, 229–242. [Google Scholar] [CrossRef]
- Auricchio, F.; Taylor, R.L.; Lubliner, J. Shape-memory alloys: Macromodelling and numerical simulations of the superelastic behavior. Comput. Methods Appl. Mech. Eng. 1997, 146, 281–312. [Google Scholar] [CrossRef]
- GB 50011-2010; Code for Seismic Design of Buildings. China Architecture and Building Press: Beijing, China, 2016.
- Vamvatsikos, D.; Cornell, C.A. Direct estimation of seismic demand and capacity of multidegree-of-freedom systems through incremental dynamic analysis of single degree of freedom approximation. J. Struct. Eng. 2005, 131, 589–599. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Section Area of SMA (mm2) | Loading Rate (mm/min) | Number of Loading Cycles | Strain Amplitude (%) |
|---|---|---|---|---|
| 1 | 12.57 | 5 | 20 | 5 |
| 2 | 12.57 | 5 | 1 | 3 5 7 |
| σMs (MPa) | εMs (%) | σMf (MPa) | εMf (%) | σAs (MPa) | εAs (%) | σAf (MPa) | εAf (%) |
|---|---|---|---|---|---|---|---|
| 454.19 | 1.82 | 609.89 | 6.97 | 271.78 | 5.29 | 116.08 | 0.47 |
| No. | ID of Specimen | Section Area of SMA (mm2) | Loading Rate (mm/min) | Loading Displacement Amplitude (mm) | Pre-Tightening Force of FD (kN) |
|---|---|---|---|---|---|
| 1 | FD | 0 | 5 | 9 15 21 | 7 |
| 2 | D-SCFD | 25.13 | 5 | 9 15 21 | 3 5 7 |
| uMs (mm) | FMs (N) | uMf (mm) | FMf (N) | uAf (mm) | FAf (N) | kSMA,1(N/mm) | kSMA,2 (N/mm) |
|---|---|---|---|---|---|---|---|
| 5.47 | 11,409.18 | 21.00 | 15,328.21 | 1.40 | 2915.95 | 2085.77 | 251.84 |
| Pre-Tightening Force of FD (kN) | Theoretical Rdr (%) | Experimental Rdr (%) | Absolute Error of Rdr (%) | Theoretical ξeq (%) | Experimental ξeq (%) | Absolute Error of ξeq (%) |
|---|---|---|---|---|---|---|
| 3 | 6.03 | 15.63 | 9.6 | 15.03 | 15.84 | 0.81 |
| 5 | 21.48 | 30.35 | 8.87 | 18.72 | 19.36 | 0.64 |
| 7 | 39.08 | 49.35 | 10.27 | 21.89 | 22.35 | 0.46 |
| No. | Event | MS | AS | Station | ||
|---|---|---|---|---|---|---|
| Earthquake Magnitude (Mw) | Date | Earthquake Magnitude (Mw) | Date | |||
| GM1 | Chalfant Valley | 5.77 | 20 July 1986 | 6.19 | 21 July 1986 | Bishop, Paradise Lodge |
| GM2 | Whittier Narrows | 5.99 | 1 October 1987 | 5.27 | 4 October 1987 | Bell Gardens, Jaboneria |
| GM3 | Northridge | 6.69 | 17 January 1994 | 5.28 | 20 March 1994 | Arleta, Nordhoff Fire Sta |
| GM4 | Chi-Chi, Taiwan | 7.62 | 20 September 1999 | 6.20 | 20 September 1999 | CHY024 |
| GM5 | L’Aquila, Italy | 6.30 | 6 April 2009 | 5.60 | 7 April 2009 | L’Aquila, Parking |
| GM6 | Darfield, New Zealand | 7.00 | 3 September 2010 | 6.20 | 21 February 2011 | Canterbury Aero Club |
| GM7 | Kahramanmaras, Turkey | 7.70 | 6 February 2023 | 7.60 | 6 February 2023 | 6203 |
| No. | ID of Damper | Maximum Axial Force (kN) | Limits of Deformations (mm) | α (%) | β (%) | Theoretical ξeq (%) | Theoretical Rdr (%) | Section Area of SMA (mm2) | Stiffness of Coil Springs (kN/mm) | Pre-Tightening Force of FD (kN) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | D-SCFD-1 | 500.00 | 60.00 | 20.00 | 22.16 | 17.99 | 10.00 | 576.69 | 1.17 | 77.95 |
| 2 | D-SCFD-2 | 500.00 | 60.00 | 20.00 | 33.07 | 21.24 | 30.00 | 535.61 | 1.09 | 108.00 |
| 3 | D-SCFD-3 | 500.00 | 60.00 | 20.00 | 43.98 | 24.07 | 50.00 | 499.95 | 1.02 | 134.10 |
| ID of Damper | Coil Springs | FD | SMA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Linear | Plastic (Wen) | Multi-Linear Elastic | Plastic (Wen) | ||||||||
| k (kN/mm) | k1 (kN/mm) | Fy (kN) | k2/k1 (%) | u1 (mm) | F1 (kN) | u2 (mm) | F2 (kN) | k1 (kN/mm) | Fy (kN) | k2/k1 (%) | |
| D-SCFD | 0.29 | 7.00 | 7.00 | 0.00 | 5.46 | 7.77 | 21.00 | 11.68 | 3.64 | 3.64 | 0.00 |
| ID of Damper | Coil Springs | FD | SMA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Linear | Plastic (Wen) | Multi-Linear Elastic | Plastic (Wen) | ||||||||
| k (kN/mm) | k1 (kN/mm) | Fy (kN) | k2/k1 (%) | u1 (mm) | F1 (kN) | u2 (mm) | F2 (kN) | k1 (kN/mm) | Fy (kN) | k2/k1 (%) | |
| D-SCFD-1 | 1.17 | 77.95 | 77.95 | 0.00 | 15.67 | 176.19 | 60.00 | 265.98 | 5.47 | 85.72 | 0.00 |
| D-SCFD-2 | 1.09 | 108.00 | 108.00 | 0.00 | 15.67 | 163.51 | 60.00 | 246.91 | 5.09 | 79.74 | 0.00 |
| D-SCFD-3 | 1.02 | 134.10 | 134.10 | 0.00 | 15.67 | 152.75 | 60.00 | 230.59 | 4.74 | 74.31 | 0.00 |
| Number of Story | SF | SF with D-SCFD-1 | SF with D-SCFD-2 | SF with D-SCFD-3 | |||
|---|---|---|---|---|---|---|---|
| APIDR (%) | APIDR (%) | Control Rate of APIDR (%) | APIDR (%) | Control Rate of APIDR (%) | APIDR (%) | Control Rate of APIDR (%) | |
| 1 | 0.980 | 0.813 | 17.04 | 0.775 | 20.92 | 0.774 | 21.02 |
| 2 | 1.296 | 1.084 | 16.36 | 1.028 | 20.68 | 0.987 | 23.84 |
| 3 | 1.257 | 0.973 | 22.59 | 0.919 | 26.89 | 0.881 | 29.91 |
| 4 | 0.941 | 0.773 | 17.85 | 0.737 | 21.68 | 0.709 | 24.65 |
| 5 | 0.461 | 0.365 | 20.82 | 0.347 | 24.73 | 0.330 | 28.42 |
| Number of Story | SF | SF with D-SCFD-1 | SF with D-SCFD-2 | SF with D-SCFD-3 | |||
|---|---|---|---|---|---|---|---|
| ARIDR (%) | ARIDR (%) | Control Rate of ARIDR (%) | ARIDR (%) | Control Rate of ARIDR (%) | ARIDR (%) | Control Rate of ARIDR (%) | |
| 1 | 0.027 | 0.013 | 51.85 | 0.010 | 62.96 | 0.009 | 66.67 |
| 2 | 0.054 | 0.025 | 53.70 | 0.020 | 62.96 | 0.017 | 68.52 |
| 3 | 0.048 | 0.021 | 56.25 | 0.017 | 64.58 | 0.017 | 64.58 |
| 4 | 0.021 | 0.012 | 42.86 | 0.010 | 52.38 | 0.009 | 57.14 |
| 5 | 0.005 | 0.004 | 20.00 | 0.004 | 20.00 | 0.006 | −20.00 |
| Number of Story | SF | SF with D-SCFD-1 | SF with D-SCFD-2 | SF with D-SCFD-3 | |||
|---|---|---|---|---|---|---|---|
| APFA (m/s2) | APFA (m/s2) | Control Rates of APFA (%) | APFA (m/s2) | Control Rates of APFA (%) | APFA (m/s2) | Control Rates of APFA (%) | |
| 1 | 12.03 | 10.31 | 14.30 | 10.03 | 16.63 | 9.82 | 18.37 |
| 2 | 14.28 | 11.40 | 20.17 | 10.85 | 24.02 | 10.59 | 25.84 |
| 3 | 12.35 | 11.87 | 3.89 | 11.37 | 7.94 | 10.94 | 11.42 |
| 4 | 15.86 | 14.39 | 9.27 | 13.88 | 12.48 | 13.58 | 14.38 |
| 5 | 24.09 | 19.52 | 18.97 | 18.71 | 22.33 | 18.01 | 25.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, J.; Liu, X.; Bai, Y.; Wang, W.; Li, Y.; Pu, J.; Zhou, C. A Novel Dual Self-Centering Friction Damper for Seismic Responses Control of Steel Frame. Buildings 2024, 14, 407. https://doi.org/10.3390/buildings14020407
Qu J, Liu X, Bai Y, Wang W, Li Y, Pu J, Zhou C. A Novel Dual Self-Centering Friction Damper for Seismic Responses Control of Steel Frame. Buildings. 2024; 14(2):407. https://doi.org/10.3390/buildings14020407
Chicago/Turabian StyleQu, Juntong, Xinyue Liu, Yuxiang Bai, Wenbin Wang, Yuheng Li, Junxiang Pu, and Chunlei Zhou. 2024. "A Novel Dual Self-Centering Friction Damper for Seismic Responses Control of Steel Frame" Buildings 14, no. 2: 407. https://doi.org/10.3390/buildings14020407
APA StyleQu, J., Liu, X., Bai, Y., Wang, W., Li, Y., Pu, J., & Zhou, C. (2024). A Novel Dual Self-Centering Friction Damper for Seismic Responses Control of Steel Frame. Buildings, 14(2), 407. https://doi.org/10.3390/buildings14020407