
Enhancing the Accuracy of Low-Cost Inclinometers with Artificial Intelligence


 ,
,  ,
,  and
and
Abstract
:1. Introduction
1.1. Low-Cost Inclinometers
1.2. Low-Cost Inclinometers in Smart Homes
1.3. Aim of the Paper and Structure
2. Research Methodology
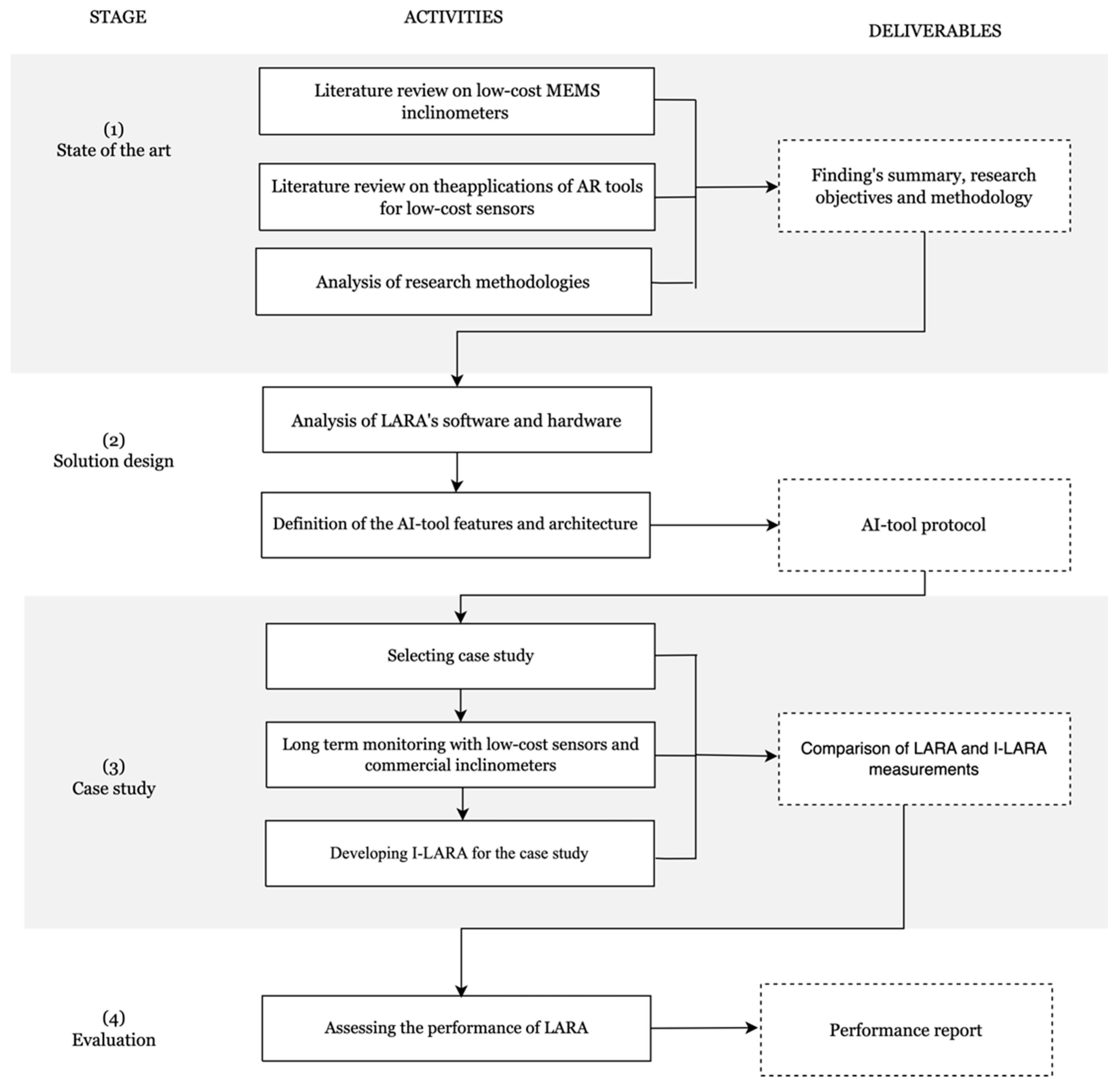
- Stage (i)—State-of-the-art review: This stage aims to identify gaps in the existing literature. Initially, this involves a systematic literature review of low-cost MEMS inclinometers. This is followed by an examination of how artificial intelligence tools can address the technical limitations of these devices. The literature reviews for this stage were conducted on Scopus and Web of Science, following the systematic approach proposed by Navarro et al. [60] and followed by Komary et al. [34]. Finally, the research methodology to be employed is defined. The outcomes of this stage encompass a summary of findings, the research objectives, and the customization of the research methodology. The results derived from this stage are included in both the Introduction and Section 2: “Research Methodology”.
- Stage (ii)—Solution design: After defining the hardware and software components of LARA, this phase articulates the characteristics and design of the AI tools that will be employed to improve LARA’s measurement precision. The deliverables of this phase comprise the principal functionalities of LARA and the AI tool. This information is incorporated into Section 3: “Low-cost Adaptable Reliable Anglemeter (LARA)”, and 4: “Artificial Intelligence Tool”.
- Stage (iii)—Case study: This phase involves developing an AI tool to improve LARA’s measurement accuracy within a case study. Initially, a case study is selected for analysis. Long-term monitoring of the structure is then conducted using both commercial inclinometers and LARA. Following this, the AI tool, designated as Intelligent (I)-LARA, is tailored to the specific dataset of the case study. The deliverables of this stage include the AI tool to enhance the accuracy of the monitoring information. These results are summarized in Section 5: “Case Study”.
- Stage (iv)—Evaluation: This stage is designed to evaluate the enhancement of the accuracy obtained by the AI tool in the case study. To achieve this, the outputs of LARA and I-LARA are statistically analyzed and compared with the readings from the commercial accelerometer. These results are incorporated into Section 5: “Case Study” and Section 6: “Conclusions”.
3. Low-Cost Adaptable Reliable Anglemeter (LARA)
3.1. LARA Hardware
3.2. LARA Software
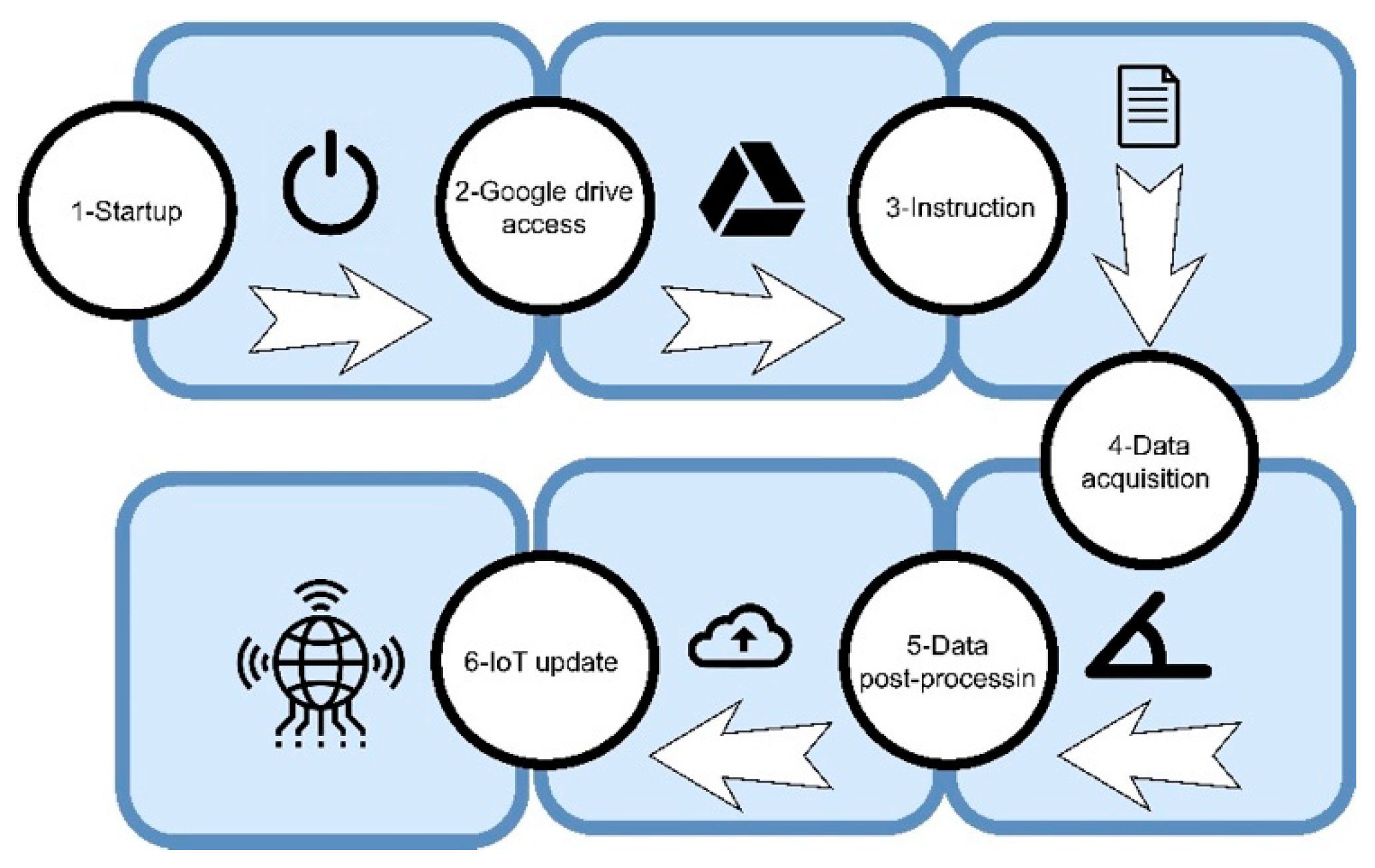
- Startup: Upon power-up, LARA is preconfigured to establish an internet connection via Wi-Fi, LAN, or SIM Card, provided that the Wi-Fi credentials align with LARA’s preprogrammed settings.
- Google Drive access: Once internet connectivity is established, LARA gains access to a predefined Google Drive repository.
- Instructions: To initiate data acquisition, LARA downloads an open-source Python code from the designated Google Drive. This code is adaptable, allowing users to specify settings such as scheduled vibration acquisition and data acquisition duration without the need for reprogramming the Raspberry Pi directly.
- Data acquisition: Upon completion of data acquisition, the acquired files are transferred to a dedicated folder on the connected Google Drive. This design ensures that LARA’s hard drive remains unburdened as long as an internet connection, via Wi-Fi or LAN, is maintained. Notably, if there is a loss of internet connectivity, the collected data will be retained on LARA’s local hard drive until the connection is restored. Additionally, the option to utilize external hard drives for expanded storage capacity is available.
- Data postprocessing: At this stage, the acquired data from LARA undergo postprocessing, primarily aimed at estimating inclination based on the collected data. Additionally, this phase allows for the implementation of other programs or processes to enhance estimation resolution or perform specific calculations. This segment is adaptable and can be customized to meet the specific requirements of the monitoring application.
- Internet of Things, IoT, update: Following the postprocessing stage, Python code is employed to transmit the estimated inclination and other computed parameters to an online IoT platform hosted on the Thingspeak website. It is worth mentioning that the Thingspeak platform is affiliated with MathWorks, the creators of MATLAB. Consequently, users can employ this platform to write custom code for further online processing and analysis of the monitored data of the channel. Notably, the channel on this platform can be either private or public. A public channel offers access to anyone with its web address, enabling them to monitor the ongoing monitoring process.
4. Artificial Intelligence Tool
4.1. Multilayer Perceptron
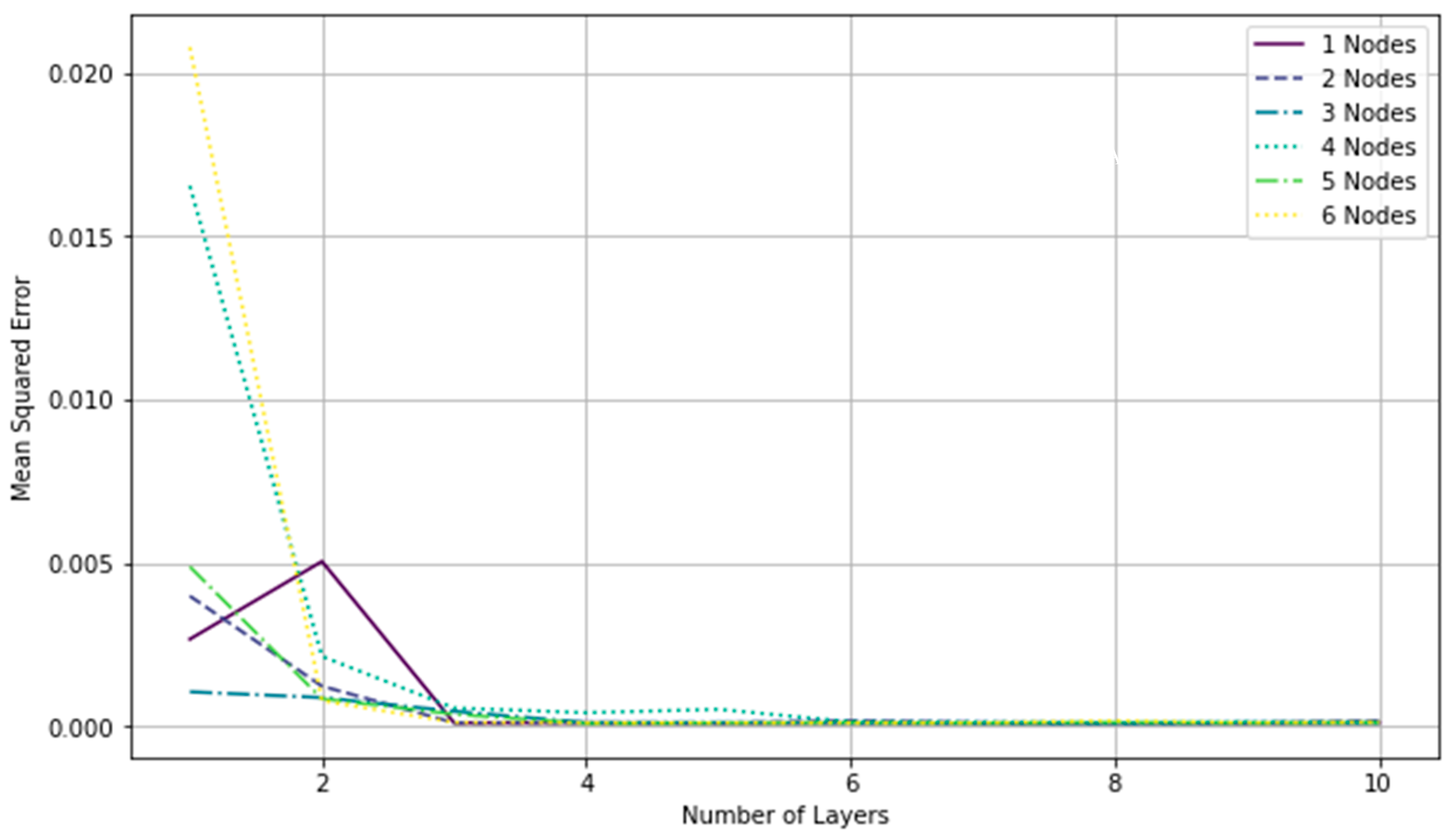
4.2. AI Architecture
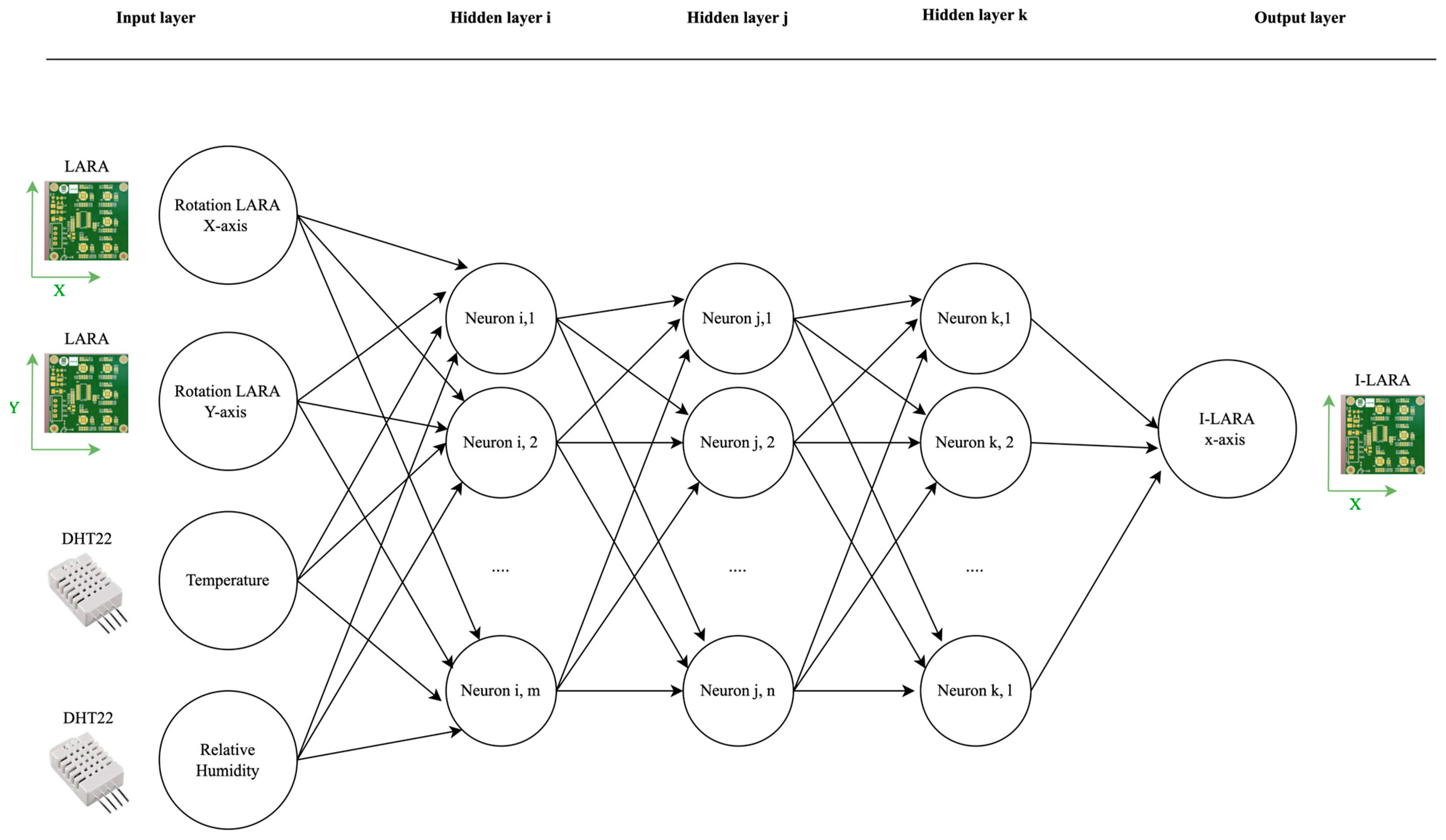
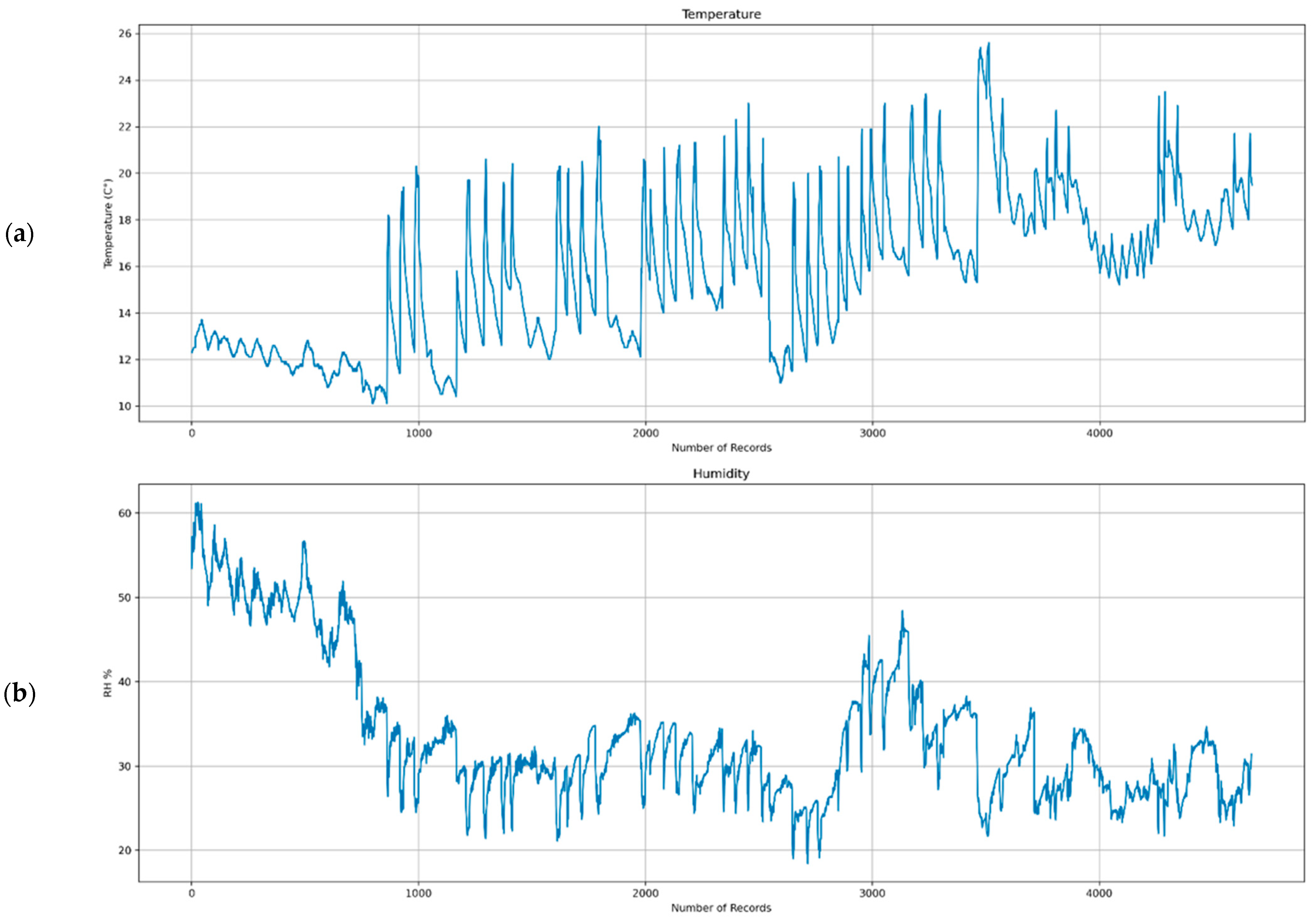
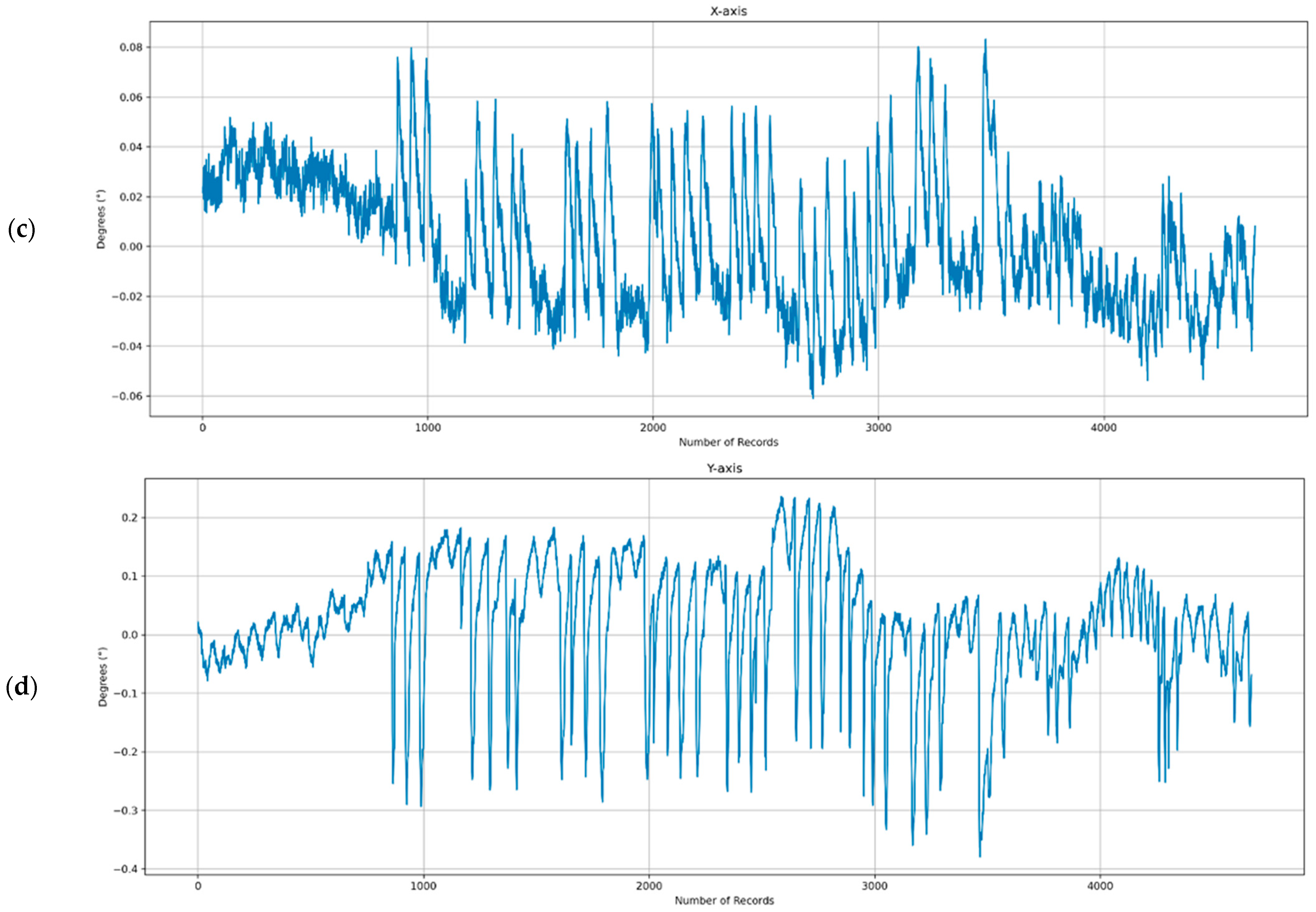
- Input layer: The input layer comprises four neurons that represent the normalized data from low-cost on-site sensors. Specifically, it processes X-axis and Y-axis rotations measured by LARA, as well as temperature and relative humidity data obtained from the DHT22 sensor. This latter sensor has been extensively used in the literature for ambient monitoring, see, e.g., [30].
- Activation functions: The Rectified Linear Activation Function (ReLU), sourced from the scikit-learn library, was selected for the activation function due to its simplicity and proven empirical efficacy. Recent examples of the application of this activation function in the literature include Gong et al. [72].
- Output layer: The output layer comprises a single neuron that yields accuracy-enhanced measurements of LARA’s inclinations along the X-axis, named Intelligent (I)-LARA. This neuron undergoes supervised training using data from precise commercial sensors.
- Solver: The “adam” solver from the scikit-learn library was selected for its demonstrated efficiency in managing datasets of substantial sizes.
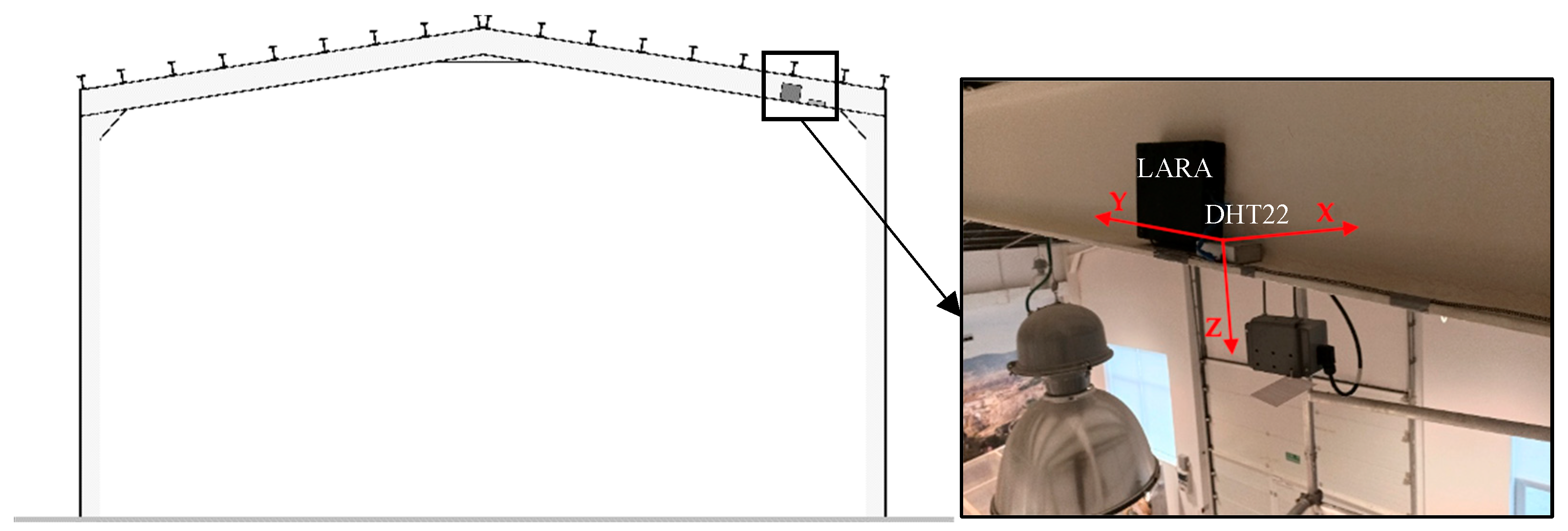
5. Case Study: Steel Gable Frame
5.1. Description of the Structure
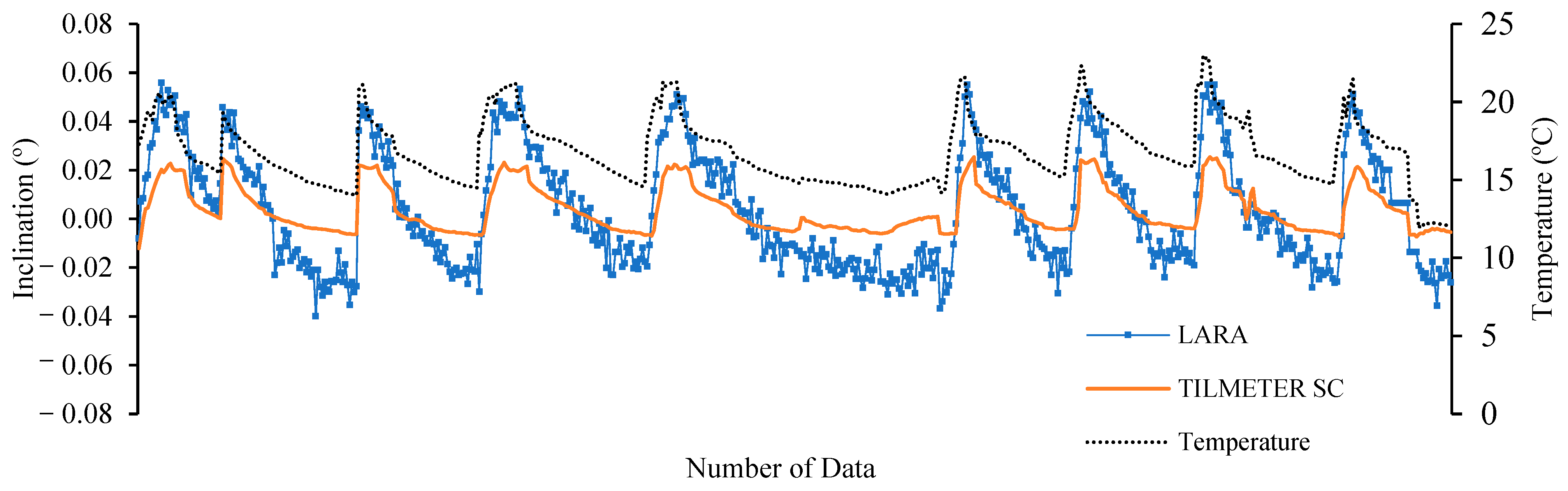
5.2. Monitoring Program
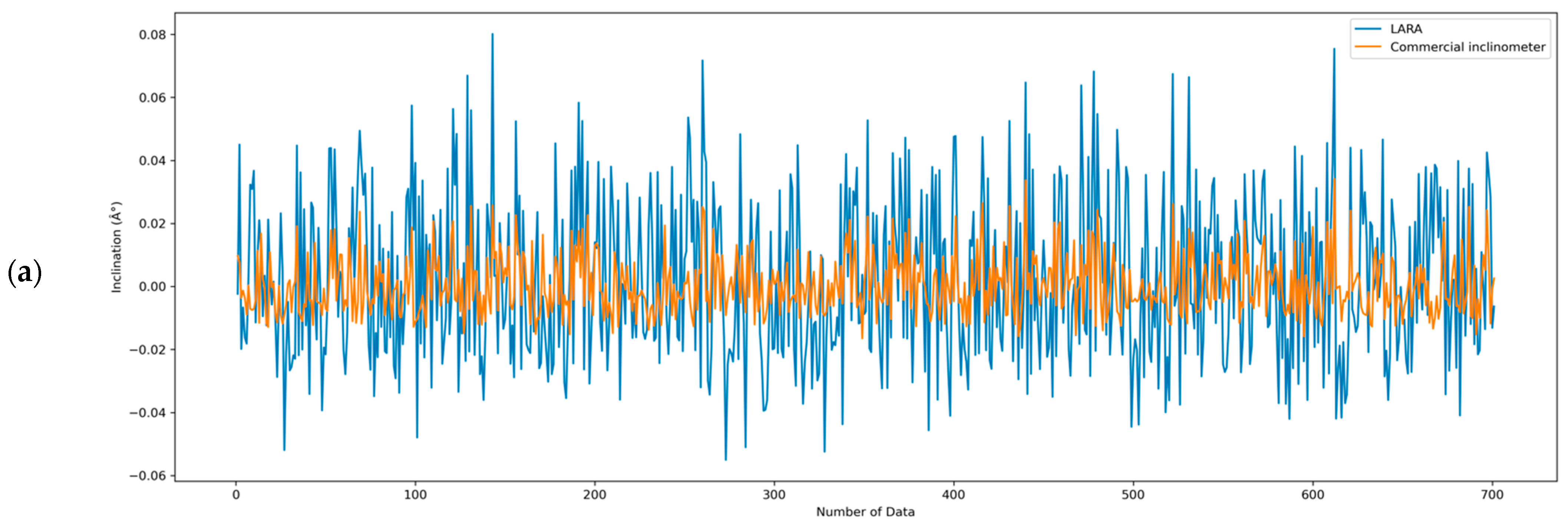
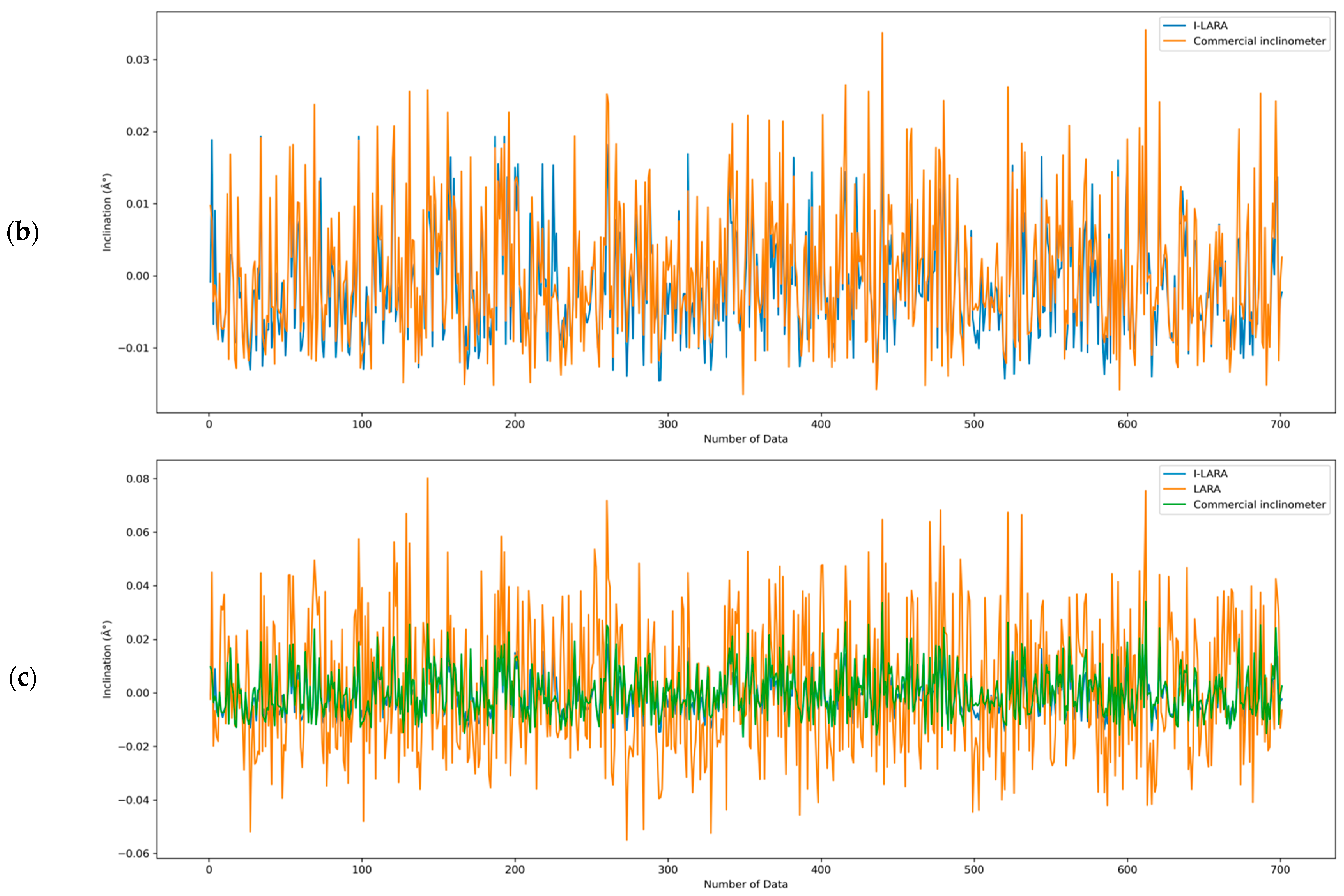
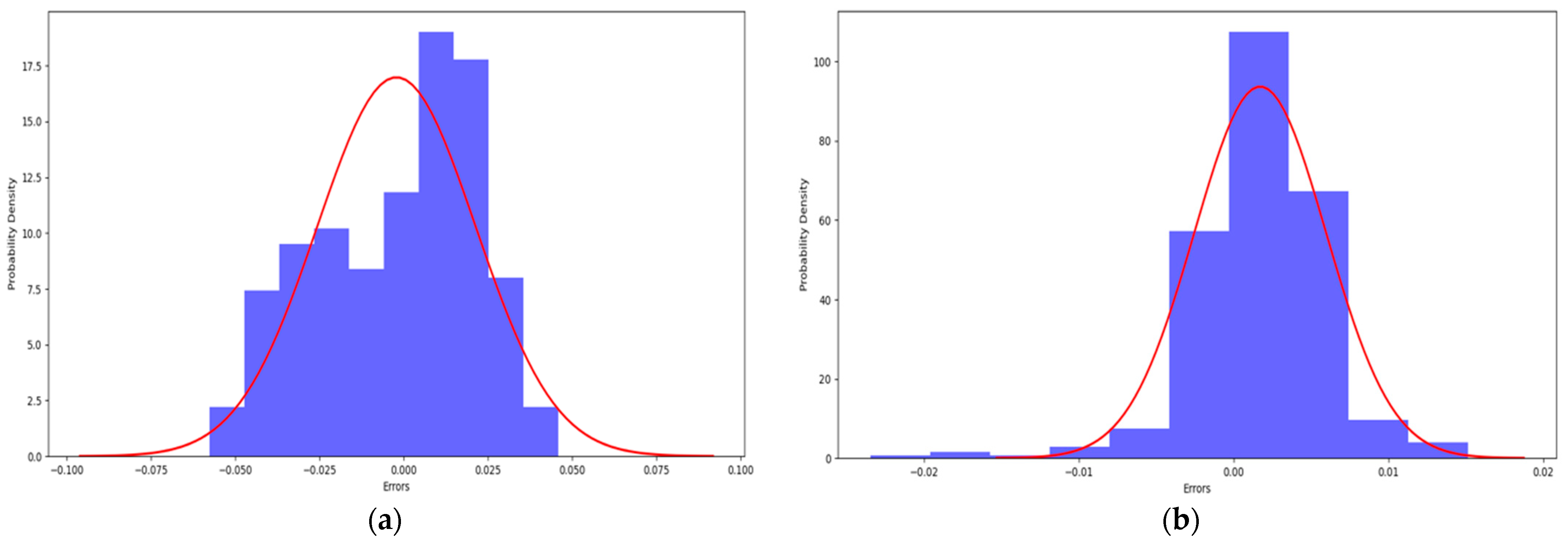
5.3. Intelligent LARA (I-LARA)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alaloul, W.S.; Liew, M.S.; Zawawi, N.A.W.A.; Kennedy, I.B. Industrial Revolution 4.0 in the construction industry: Challenges and opportunities for stakeholders. Ain Shams Eng. J. 2020, 11, 225–230. [Google Scholar] [CrossRef]
- Lozano, F.; Jurado, J.C.; Lozano-Galant, J.A.; de la Fuente, A.; Turmo, J. Integration of BIM and Value Model for Sustainability Assessment for application in bridge projects. Autom. Constr. 2023, 152, 104935. [Google Scholar] [CrossRef]
- Abioye, S.O.; Oyedele, L.O.; Akanbi, L.; Ajayi, A.; Davila Delgado, J.M.; Bilal, M.; Akinade, O.O.; Ahmed, A. Artificial intelligence in the construction industry: A review of present status, opportunities and future challenges. J. Build. Eng. 2021, 44, 103299. [Google Scholar] [CrossRef]
- Mai, H.V.T.; Nguyen, M.H.; Trinh, S.H.; Ly, H.B. Optimization of machine learning models for predicting the compressive strength of fiber-reinforced self-compacting concrete. Front. Struct. Civ. Eng. 2023, 17, 284–305. [Google Scholar] [CrossRef]
- Vadyala, S.R.; Betgeri, S.N.; Matthews, J.C.; Matthews, E. A review of physics-based machine learning in civil engineering. Results Eng. 2022, 13, 100316. [Google Scholar] [CrossRef]
- Javanmardi, R.; Ahmadi-Nedushan, B. Optimal design of double-layer barrel vaults using genetic and pattern search algorithms and optimized neural network as surrogate model. Front. Struct. Civ. Eng. 2023, 17, 378–395. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Sun, S.; Sun, L. Integrating bridge influence surface and computer vision for bridge weigh-in-motion in complicated traffic scenarios. Struct. Control Health Monit. 2022, 29, e3066. [Google Scholar] [CrossRef]
- Kang, D.; Benipal, S.S.; Gopal, D.L.; Cha, Y.J. Hybrid pixel-level concrete crack segmentation and quantification across complex backgrounds using deep learning. Autom. Constr. 2020, 118, 103291. [Google Scholar] [CrossRef]
- Ocak, A.; Nigdeli, S.M.; Bekdaş, G.; Işıkdağ, Ü. Artificial Intelligence and Deep Learning in Civil Engineering. Hybrid Metaheuristics Struct. Eng. Stud. Syst. Decis. Control 2023, 480, 265–288. [Google Scholar]
- Akinosho, T.D.; Oyedele, L.O.; Bilal, M.; Ajayi, A.O.; Delgado, M.D.; Akinade, O.O.; Ahmed, A.A. Deep learning in the construction industry: A review of present status and future innovations. J. Build. Eng. 2020, 32, 101827. [Google Scholar] [CrossRef]
- Huang, Y.; Li, J.; Fu, J. Review on Application of Artificial Intelligence in Civil Engineering. CMES-Comp. Model. Eng. Sci. CMES 2019, 121, 845–875. [Google Scholar] [CrossRef]
- Lagaros, N.D.; Plevris, V. Artificial Intelligence (AI) Applied in Civil Engineering. Appl. Sci. 2022, 12, 7595. [Google Scholar] [CrossRef]
- Manzoor, B.; Othman, I.; Durdyev, S.; Ismail, S.; Wahab, M.H. Influence of Artificial Intelligence in Civil Engineering toward Sustainable Development—A Systematic Literature Review. Appl. Syst. Innov. 2021, 4, 52. [Google Scholar] [CrossRef]
- Dede, T.; Kankal, M.; Vosoughi, A.R.; Grzywiński, M.; Kripka, M. Artificial Intelligence Applications in Civil Engineering. Adv. Civ. Eng. 2019, 2019, 8384523. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, L. Roles of artificial intelligence in construction engineering and management: A critical review and future trends. Autom. Constr. 2021, 122, 103517. [Google Scholar] [CrossRef]
- Lu, P.; Chen, S.; Zheng, Y. Artificial Intelligence in Civil and Hydraulic Engineering. Math. Probl. Eng. 2012, 2012, 109229. [Google Scholar] [CrossRef]
- Momade, M.H.; Durdyev, S.; Estrella, D.; Ismail, S. Systematic review of application of artificial intelligence tools in architectural, engineering and construction. Front. Eng. Built Environ. 2021, 1, 203–216. [Google Scholar] [CrossRef]
- Bölek, B.; Tutal, O.; Özbaşaran, H. A Systematic review on artificial intelligence applications in architecture. DRArch. 2023, 4, 91–104. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural health monitoring of civil engineering Structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of Bridge Structural Health Monitoring Aided by Big Data and Artificial Intelligence: From Condition Assessment to Damage Detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Salehi, H.; Burgueño, R. Emerging artificial intelligence methods in structural engineering. Eng. Struct. 2018, 171, 170–189. [Google Scholar] [CrossRef]
- Tryner, J.; Phillips, M.; Quinn, C.; Neymark, G.; Wilson, A.; Jathar, S.H.; Carter, E.; Volckens, J. Design and testing of a low-cost sensor and sampling platform for indoor air quality. Build. Environ. 2021, 206, 108398. [Google Scholar] [CrossRef]
- Murphy, K.; Heery, B.; Sullivan, T.; Zhang, D.; Paludetti, L.; Lau, K.T.; Diamond, D.; Costa, E.; O’Connor, N.; Regan, F. A low-cost autonomous optical sensor for water quality monitoring. Talanta 2015, 132, 520–527. [Google Scholar] [CrossRef]
- Picaut, J.; Can, A.; Fortin, N.; Ardouin, J.; Lagrange, M. Low-Cost Sensors for Urban Noise Monitoring Networks—A Literature Review. Sensors 2020, 20, 2256. [Google Scholar] [CrossRef]
- Sakphrom, S.; Limpiti, T.; Funsian, K.; Chandhaket, S.; Haiges, R.; Thinsurat, K. Intelligent Medical System with Low-Cost Wearable Monitoring Devices to Measure Basic Vital Signals of Admitted Patients. Micromachines 2021, 12, 918. [Google Scholar] [CrossRef] [PubMed]
- Mittelbach, H.; Casini, F.; Lehner, I.; Teuling, A.J.; Seneviratne, S.I. Soil moisture monitoring for climate re-search: Evaluation of a low-cost sensor in the framework of the Swiss Soil Moisture Experiment (SwissSMEX) campaign. J. Geophys. Res. Atmos. 2011, 116, D5. [Google Scholar] [CrossRef]
- Pereira, P.F.; Ramos, N.M.M. Low-Cost Arduino-based remperature, relative humidity and CO2 sensors—An assessment of their suitability for indoor built environments. J. Build. Eng. 2022, 60, 105151. [Google Scholar] [CrossRef]
- Vega-Barbas, M.; Álvarez-Campana, M.; Rivera, D.; Sanz, M.; Berrocal, J. AFOROS: A Low-Cost Wi-Fi-Based Monitoring System for Estimating Occupancy of Public Spaces. Sensors 2021, 21, 3863. [Google Scholar] [CrossRef] [PubMed]
- Riaz, A.; Sarker, M.R.; Saad, M.H.M.; Mohamed, R. Review on Comparison of Different Energy Storage Technologies Used in Micro-Energy Harvesting, WSNs, Low-Cost Microelectronic Devices: Challenges and Recommendations. Sensors 2021, 21, 5041. [Google Scholar] [CrossRef] [PubMed]
- Mobaraki, B.; Castilla Pascual, F.J.; Lozano-Galant, F.; Lozano-Galant, J.A.; Porras Soriano, R. In Situ U-value measurement of building envelopes through continuous low-cost monitoring. Case Stud. Therm. Eng. 2023, 43, 102778. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.A.; Turmo, J. Low-Cost Sensors Accuracy Study and Enhancement Strategy. Appl. Sci. 2022, 12, 3186. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Development of a Low-Cost System for the Accurate Measurement of Structural Vibrations. Sensors 2021, 21, 6191. [Google Scholar] [CrossRef]
- Mobaraki, B.; Lozano-Galant, F.; Soriano, R.P.; Pascual, F.J.C. Application of Low-Cost Sensors for Building Monitoring: A Systematic Literature Review. Buildings 2021, 11, 336. [Google Scholar] [CrossRef]
- Komary, M.; Komarizadehasl, S.; Tošić, N.; Segura, I.; Lozano-Galant, J.A.; Turmo, J. Low-Cost Technologies Used in Corrosion Monitoring. Sensors 2023, 23, 1309. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, D.; Liu, Z.; Mo, L.; Xiang, X.; Wang, Y. Rotational behavior of bolted post-to-beam glulam connections with friction damped knee brace. J. Build. Eng. 2023, 76, 107215. [Google Scholar] [CrossRef]
- Huseynov, F.; Kim, C.; OBrien, E.J.; Brownjohn, J.M.W.; Hester, D.; Chang, K.C. Bridge damage detection using rotation measurements—Experimental validation. Mech. Syst. Signal Process. 2020, 135, 106380. [Google Scholar] [CrossRef]
- Lei, J.; Lozano-Galant, J.A.; Xu, D.; Zhang, F.L.; Turmo, J. Robust Static Structural System Identification Using Rotations. Appl. Sci. 2021, 11, 9695. [Google Scholar] [CrossRef]
- Łuczak, S.; Oleksiuk, W.; Bodnicki, M. Sensing Tilt with MEMS Accelerometers. IEEE Sens. J. 2006, 6, 1669–1675. [Google Scholar] [CrossRef]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A Wireless MEMS-Based Inclinometer Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef]
- Hoang, M.L.; Pietrosanto, A. A Robust Orientation System for Inclinometer with Full-Redundancy in Heavy Industry. IEEE Sens. J. 2021, 21, 5853–5860. [Google Scholar] [CrossRef]
- Ha, D.W.; Kim, J.M.; Kim, Y.; Park, H.S. Development and application of a wireless MEMS-based borehole inclinometer for automated measurement of ground movement. Autom. Constr. 2018, 87, 49–59. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors 2020, 20, 3318. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Ou, J.; Zhang, J.; Zhang, C.; Li, L. Development of Wireless MEMS Inclination Sensor System for Swing Monitoring of Large-Scale Hook Structures. IEEE Trans. Ind. Electron. 2009, 56, 1072–1078. [Google Scholar]
- Komarizadehasl, S.; Komary, M.; Alahmad, A.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers. Sensors 2022, 22, 5605. [Google Scholar] [CrossRef] [PubMed]
- Mumuni, F.; Mumuni, A. Adaptive Kalman filter for MEMS IMU data fusion using enhanced covariance scaling. Control Theory Technol. 2021, 19, 365–374. [Google Scholar] [CrossRef]
- Alfian, R.I.; Ma’Arif, A.; Sunardi, S. Noise Reduction in the Accelerometer and Gyroscope Sensor with the Kalman Filter Algo-rithm. J. Robot. Control 2021, 2, 180–189. [Google Scholar]
- Ghasemi-Moghadam, S.; Homaeinezhad, M.R. Attitude determination by combining arrays of MEMS accelerometers, gy-ros, and magnetometers via quaternion-based complementary filter. Int. J. Numer. Model. Electron. Netw. Devices Fields 2018, 31, e2282. [Google Scholar] [CrossRef]
- Podder, I.; Fischl, T.; Bub, U. Artificial Intelligence Applications for MEMS-Based Sensors and Manufacturing Process Optimization. Telecom 2023, 4, 165–197. [Google Scholar] [CrossRef]
- Guo, G.; Chai, B.; Cheng, R.; Wang, Y. Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA. Sensors 2023, 23, 1809. [Google Scholar] [CrossRef]
- Qi, B.; Shi, S.; Zhao, L.; Cheng, J. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines 2022, 13, 835. [Google Scholar] [CrossRef]
- Pan, Y.; Li, L.; Ren, C.; Luo, H. Study on the compensation for a quartz accelerometer based on a wavelet neural network. Meas. Sci. Technol. 2010, 21, 105202. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- EL Tiltmeter–DGSI. Available online: https://durhamgeo.com/products/el-tiltmeter/ (accessed on 14 September 2023).
- ACA2200-High Accuracy Digital Type Dual-Axis Inclinometer with Full Temperature Compensation SPECIFICATIONS. Available online: http://www.jca.kr/img_up/shop_pds/jcaauto3/product/aca2200t-canopenspecificationdownload.pdf (accessed on 14 September 2023).
- Hoang, M.L.; Pietrosanto, A. New Artificial Intelligence Approach to Inclination Measurement Based on MEMS Accelerometer. IEEE Trans. Artif. Intell. 2022, 3, 67–77. [Google Scholar] [CrossRef]
- Lertlakkhanakul, J.; Won, J.C.; Yun, M.K. Building data model and simulation platform for spatial interaction management in smart home. Autom. Constr. 2008, 17, 948–957. [Google Scholar] [CrossRef]
- Gazis, A. Smart Home IoT Sensors: Principles and Applications—A Review of Low-Cost and Low-Power Solutions. Int. J. Eng. Technol. Inform. 2021, 2, 19–23. [Google Scholar] [CrossRef]
- Wang, W.; Asci, C.; Zeng, W.; Sonkusale, S. Zero-power screen printed flexible RFID sensors for Smart Home. J. Ambient Intell. Hum. Comput. 2022, 14, 3995–4004. [Google Scholar] [CrossRef]
- March, S.T.; Smith, G.F. Design and natural science research on information technology. Decis. Support Syst. 1995, 15, 251–266. [Google Scholar] [CrossRef]
- Navarro, I.J.; Penadés-Plà, V.; Martínez-Muñoz, D.; Rempling, R.; Yepes, V. Life cycle sustainability assessment for multi-criteria decision making in bridge design: A review. J. Civ. Eng. Manag. 2020, 26, 690–704. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Huguenet, P.; Lozano, F.; Lozano-Galant, J.A.; Turmo, J. Operational and Analytical Modal Analysis of a Bridge Using Low-Cost Wireless Arduino-Based Accelerometers. Sensors 2022, 22, 9808. [Google Scholar] [CrossRef]
- Gnanasambandam, A.; Chan, S.H. Exposure-Referred Signal-To-Noise Ratio for Digital Image Sensors. IEEE Trans. Comput. Imaging 2022, 8, 561–575. [Google Scholar] [CrossRef]
- Faulkner, K.; Brownjohn, J.M.W.; Wang, Y.; Huseynov, F. Tracking bridge tilt behavior using sensor fusion techniques. J. Civ. Struct. Health Monit. 2020, 10, 543–555. [Google Scholar] [CrossRef]
- Wang, Q.; Qi, J.; Hosseini, S.; Rasekh, H.; Huang, J. ICA-LightGBM Algorithm for Predicting Compressive Strength of Geo-Polymer Concrete. Buildings 2023, 13, 2278. [Google Scholar] [CrossRef]
- Nejati, F.; Tahoori, N.; Sharifian, M.A.; Ghafari, A.; Nehdi, M.L. Estimating Heating Load in Residential Buildings Using Multi-Verse Optimizer, Self-Organizing Self-Adaptive, and Vortex Search Neural-Evolutionary Techniques. Buildings 2022, 12, 1328. [Google Scholar] [CrossRef]
- Martínez-Comesaña, M.; Ogando-Martínez, A.; Troncoso-Pastoriza, F.; López-Gómez, J.; Febrero-Garrido, L.; Granada-Álvarez, E. Use of optimised MLP neural networks for spatiotemporal estimation of indoor environmental conditions of existing buildings. Build. Environ. 2021, 205, 108243. [Google Scholar] [CrossRef]
- Hackeling, G. Mastering Machine Learning with Scikit-Learn, 1st ed.; Packt Publishing: New York, NY, USA, 2014; p. 238. [Google Scholar]
- Yang, H.; Ran, M.; Feng, H. Improved Data-Driven Building Daily Energy Consumption Prediction Models Based on Balance Point Temperature. Buildings 2023, 13, 1423. [Google Scholar] [CrossRef]
- Buddhahai, B.; Korkua, S.K.; Rakkwamsuk, P.; Makonin, S. A Design and Comparative Analysis of a Home Energy Disaggregation System Based on a Multi-Target Learning Framework. Buildings 2023, 13, 911. [Google Scholar] [CrossRef]
- Chen, Y.; Ye, Y.; Liu, J.; Zhang, L.; Li, W.; Mohtaram, S. Machine Learning Approach to Predict Building Thermal Load Considering Feature Variable Dimensions: An Office Building Case Study. Buildings 2023, 13, 312. [Google Scholar] [CrossRef]
- Haruehansapong, K.; Roungprom, W.; Kliangkhlao, M.; Yeranee, K.; Sahoh, B. Deep Learning-Driven Auto-mated Fault Detection and Diagnostics Based on a Contextual Environment: A Case Study of HVAC System. Buildings 2023, 13, 27. [Google Scholar] [CrossRef]
- Gong, Q.; Kang, W.; Fahroo, F. Approximation of compositional functions with ReLU neural networks. Syst. Control Lett. 2023, 175, 105508. [Google Scholar] [CrossRef]
- González-Arteaga, J.; Alonso, J.; Moya, M.; Merlo, O.; Navarro, V.; Yustres, Á. Long-term monitoring of the distribution of a building’s settlements: Sectorization and study of the underlying factors. Eng. Struct. 2020, 205, 110111. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Components | Software Components |
|---|---|
Inclinometers:
| Inclinometer Data Processing:
|
Microcontrollers:
| Communication Protocol:
|
Wireless Communication Module:
| Centralized Control System:
|
Central Processing Unit (CPU):
| User Interface:
|
Power Supply:
| Automation Scripts:
|
| LARA Inclinometer | |
|---|---|
| Measurement range | 0–4° |
| Static precision | Up to 0.002° |
| Dynamic precision | Up to 0.02° |
| Sampling rate | 333 Hz |
| Sensor type | Triaxial |
| EL Tiltmeter SC | |
|---|---|
| Resolution and range | 1 arc second ± 40 arc minutes |
| Resolution thermometer | 30 × 10−5° |
| Temperature range | [−20°, 50°] |
| Dimensions | 124 × 80 × 59 mm |
| Characteristics | Variables |
|---|---|
| Input layer | 4 |
| Output layer | 1 |
| Hidden layer | 3 |
| Hidden neurons per layer | 5 |
| Learning rate | 1 × 10−5 |
| Epochs | 100 |
| Activation function | ReLU |
| Solver | Adams |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozano, F.; Emadi, S.; Komarizadehasl, S.; Arteaga, J.G.; Xia, Y. Enhancing the Accuracy of Low-Cost Inclinometers with Artificial Intelligence. Buildings 2024, 14, 519. https://doi.org/10.3390/buildings14020519
Lozano F, Emadi S, Komarizadehasl S, Arteaga JG, Xia Y. Enhancing the Accuracy of Low-Cost Inclinometers with Artificial Intelligence. Buildings. 2024; 14(2):519. https://doi.org/10.3390/buildings14020519
Chicago/Turabian StyleLozano, Fidel, Seyyedbehrad Emadi, Seyedmilad Komarizadehasl, Jesús González Arteaga, and Ye Xia. 2024. "Enhancing the Accuracy of Low-Cost Inclinometers with Artificial Intelligence" Buildings 14, no. 2: 519. https://doi.org/10.3390/buildings14020519
APA StyleLozano, F., Emadi, S., Komarizadehasl, S., Arteaga, J. G., & Xia, Y. (2024). Enhancing the Accuracy of Low-Cost Inclinometers with Artificial Intelligence. Buildings, 14(2), 519. https://doi.org/10.3390/buildings14020519