
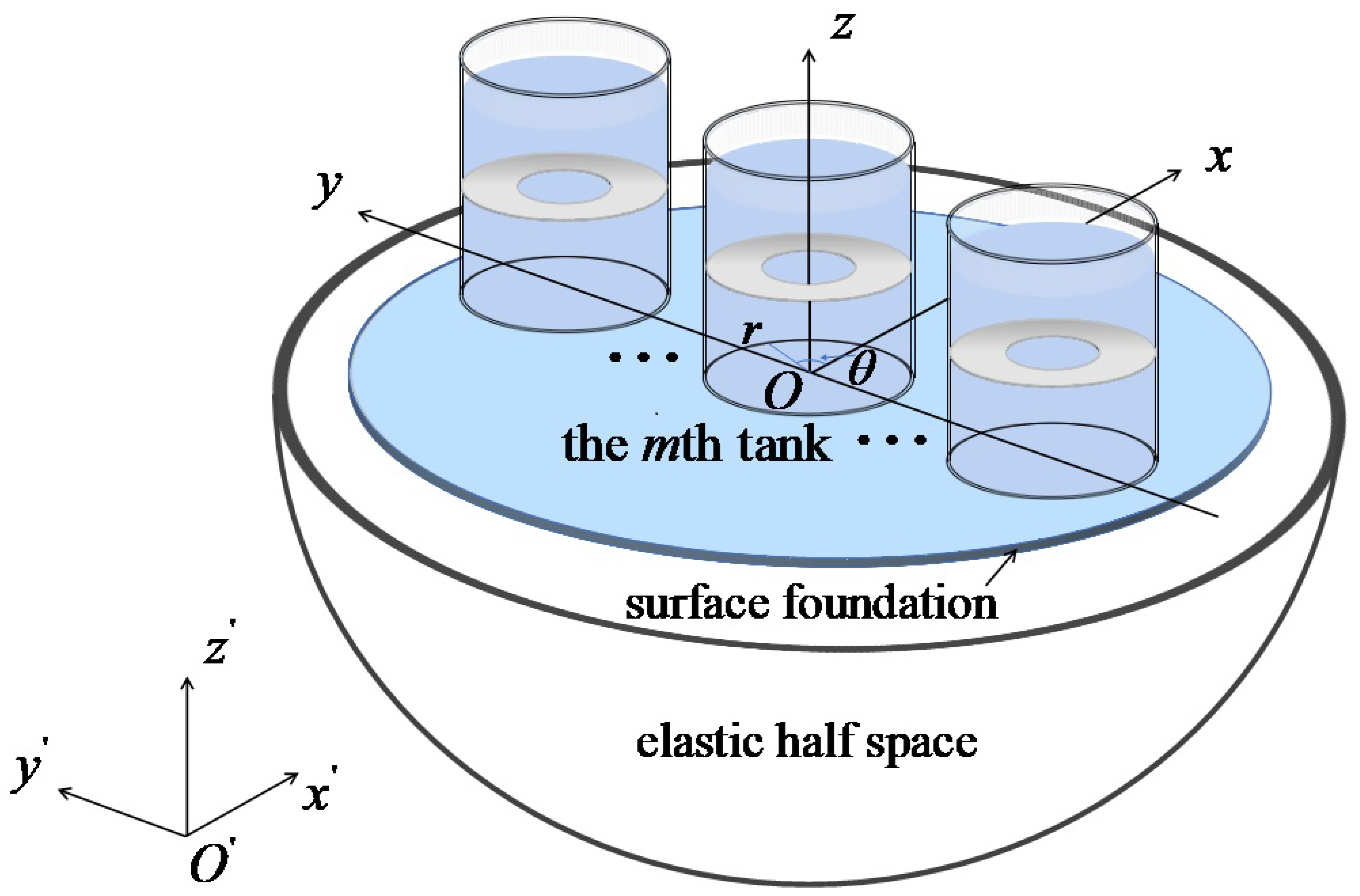
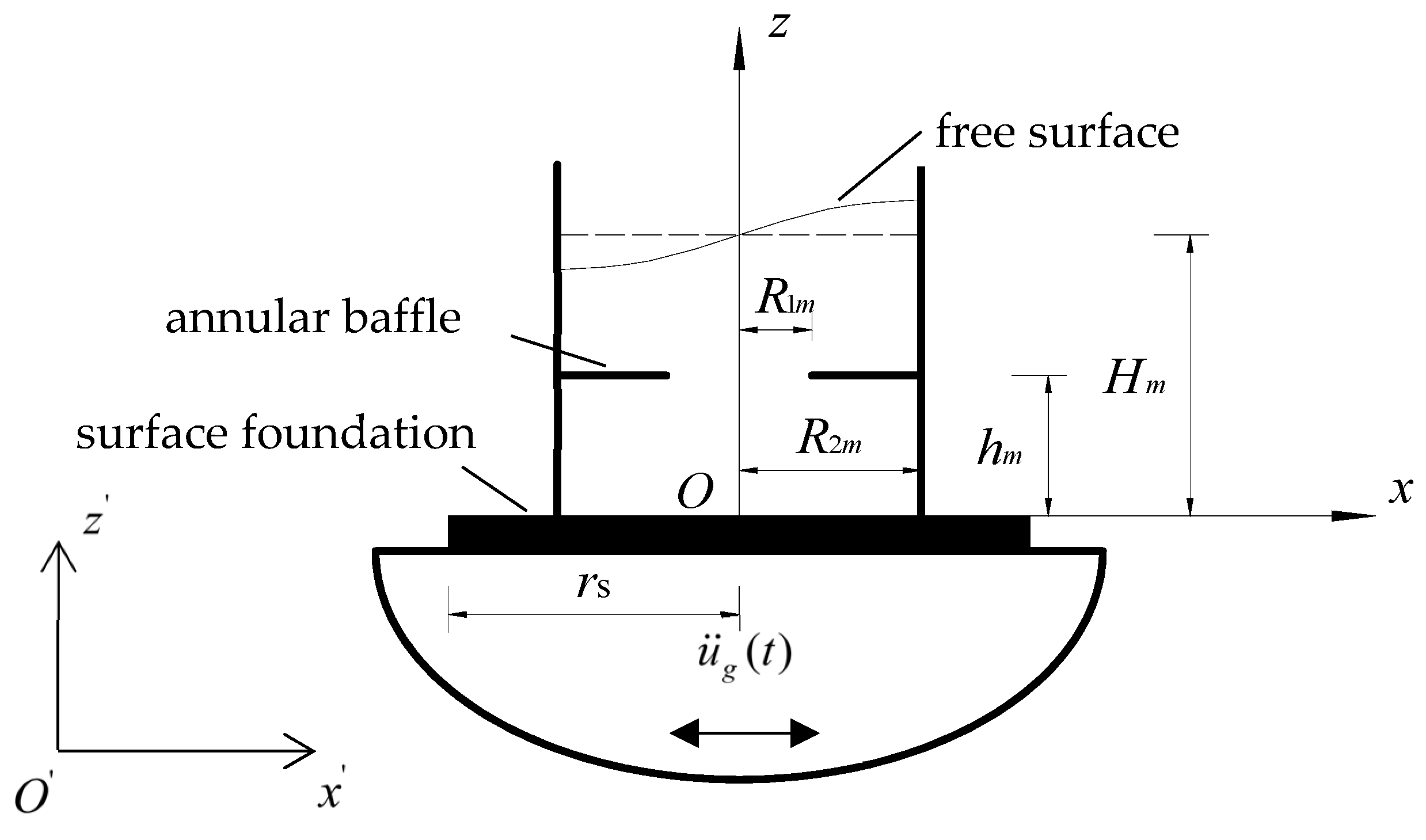
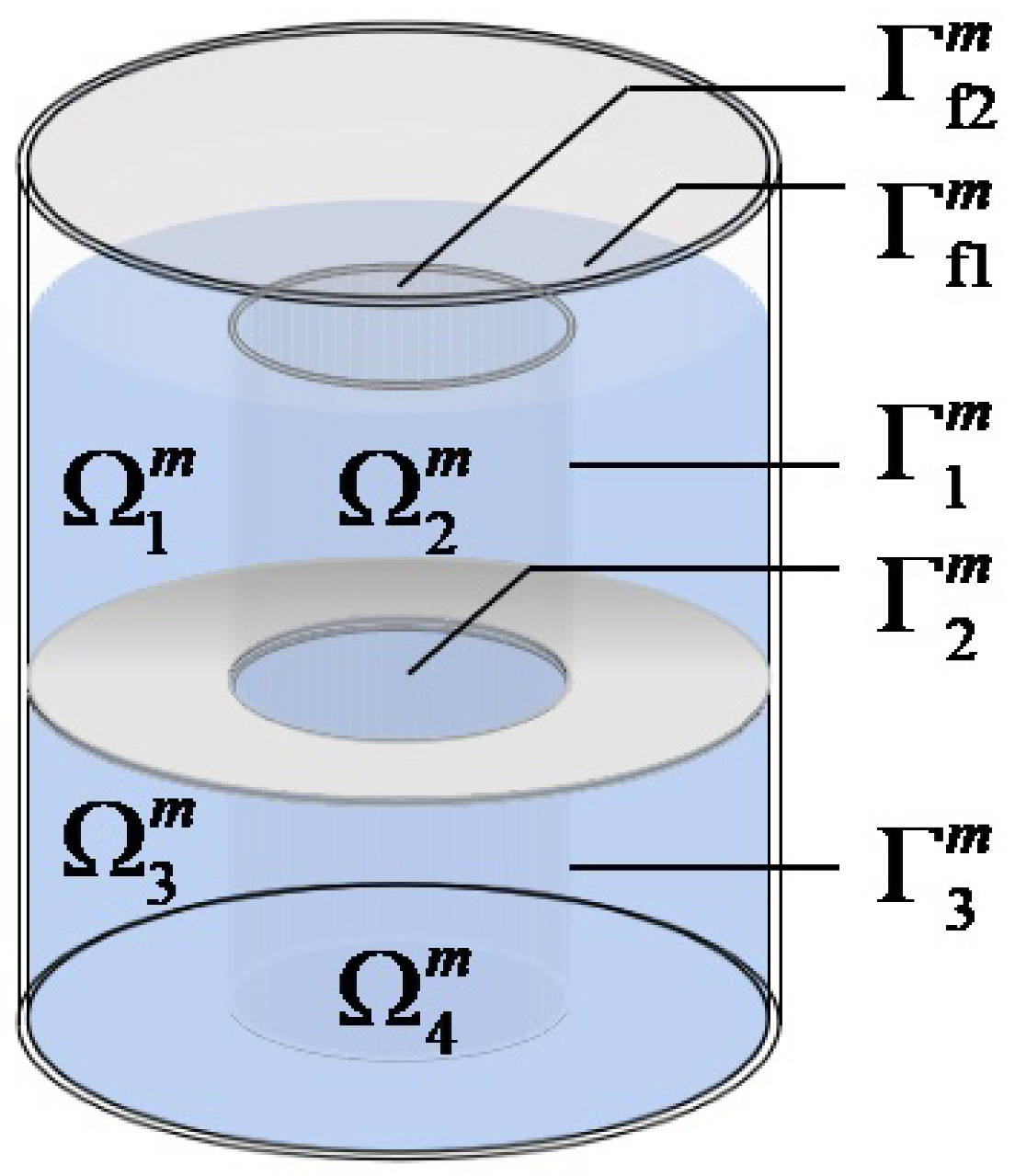
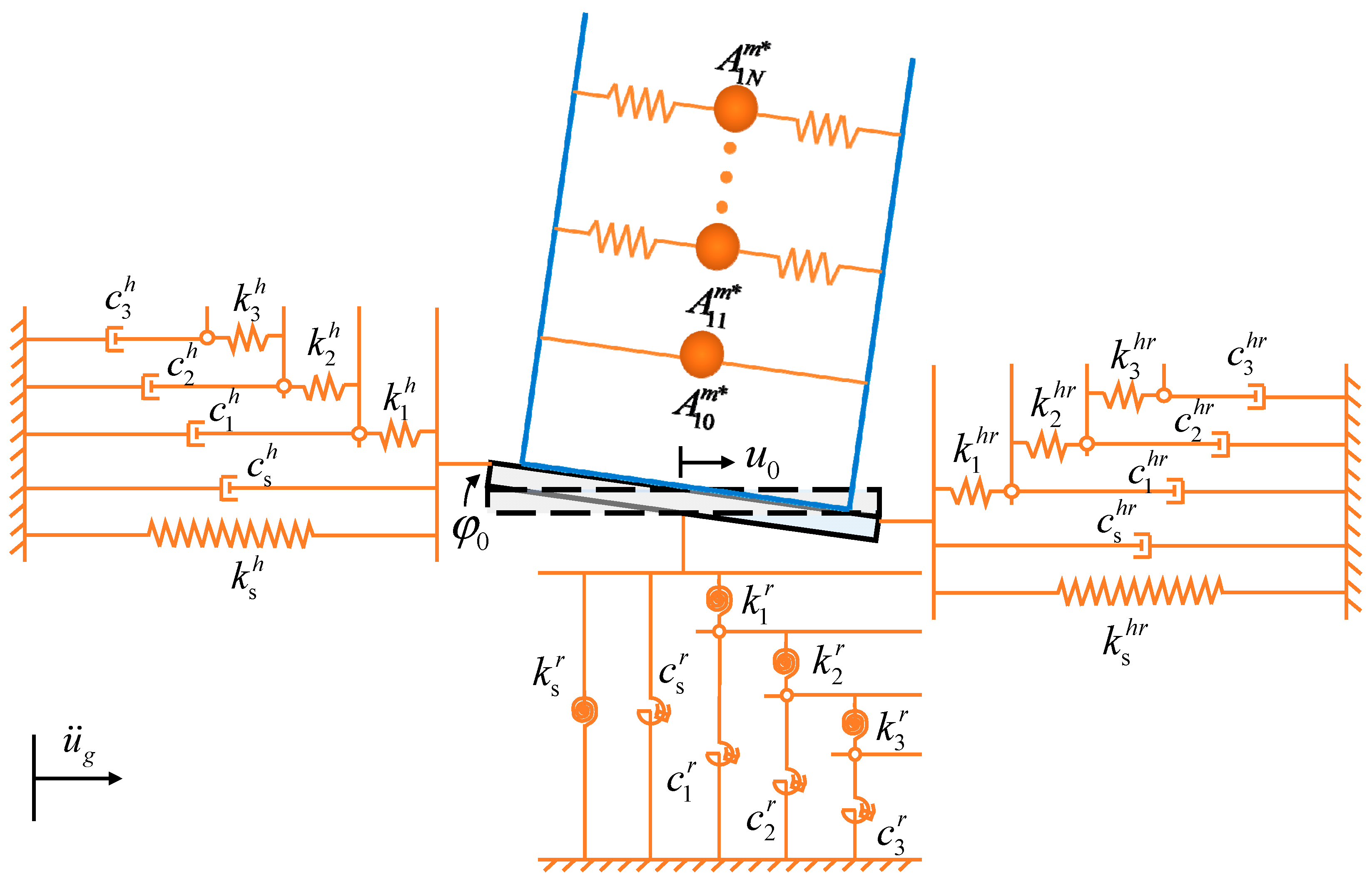
Liquid Sloshing in Soil-Supported Multiple Cylindrical Tanks Equipped with Baffle under Horizontal Excitation



Abstract
:1. Introduction
2. Materials and Methods
3. Comparison Studies
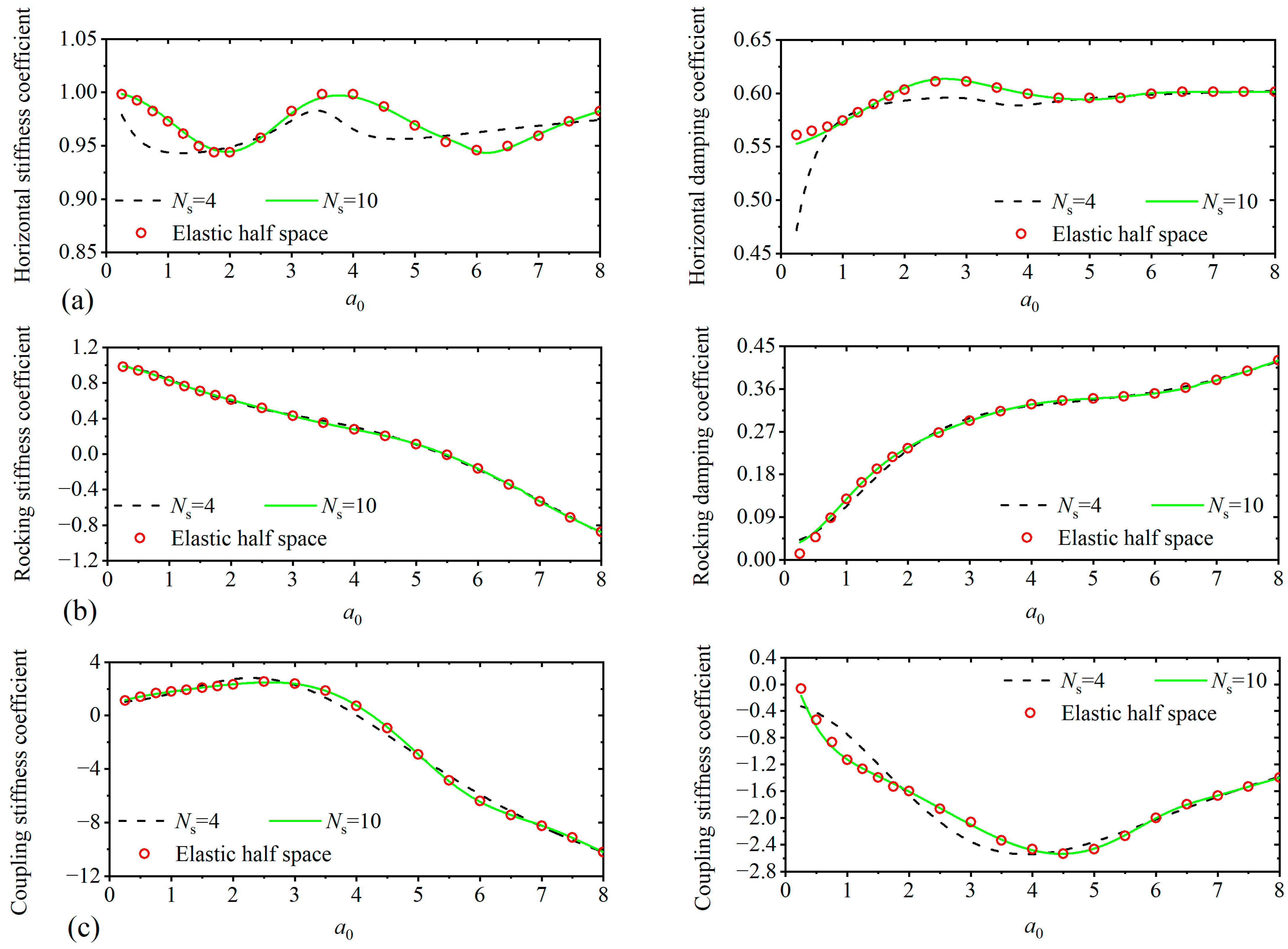
3.1. Lumped-Parameter Model of Soil
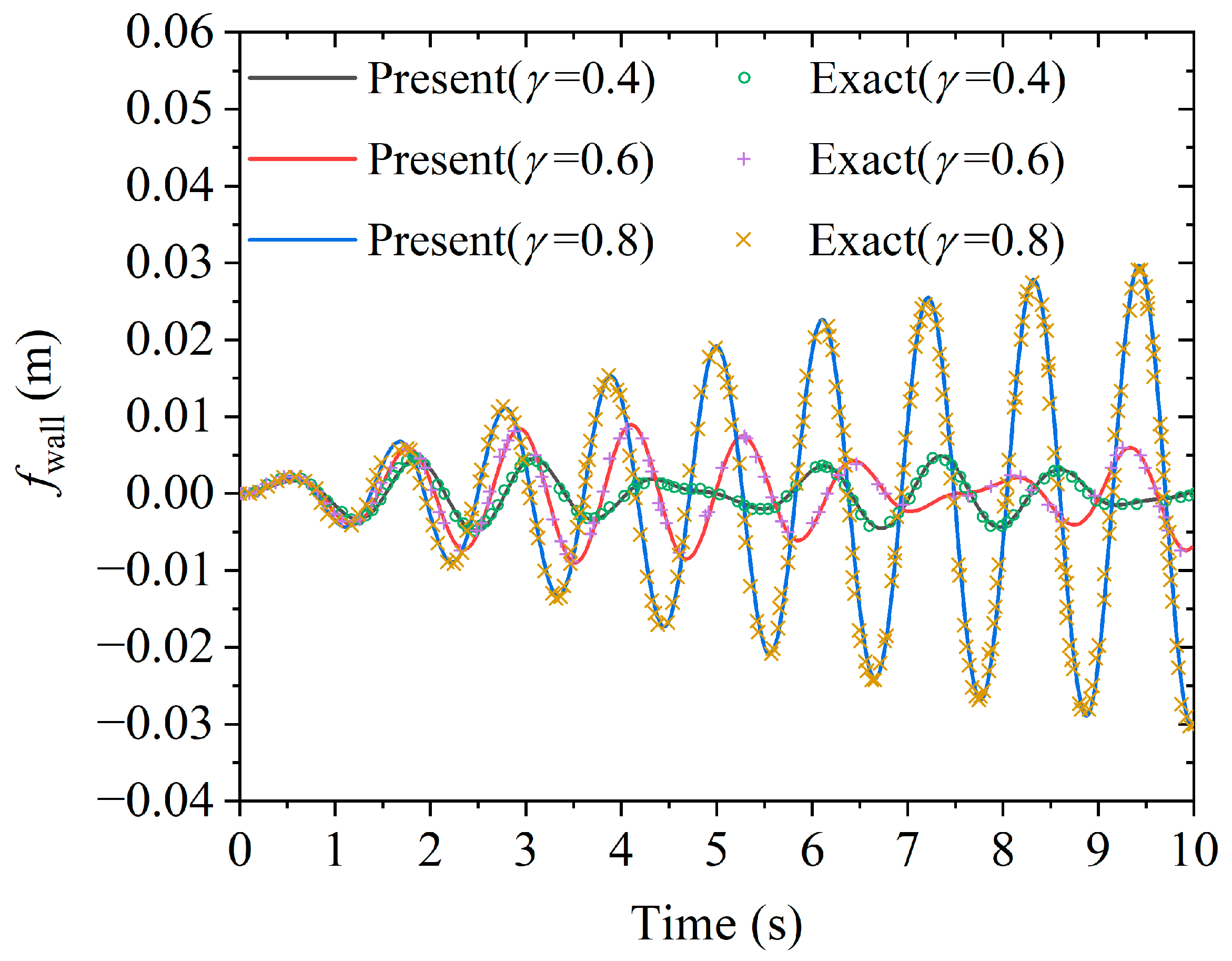
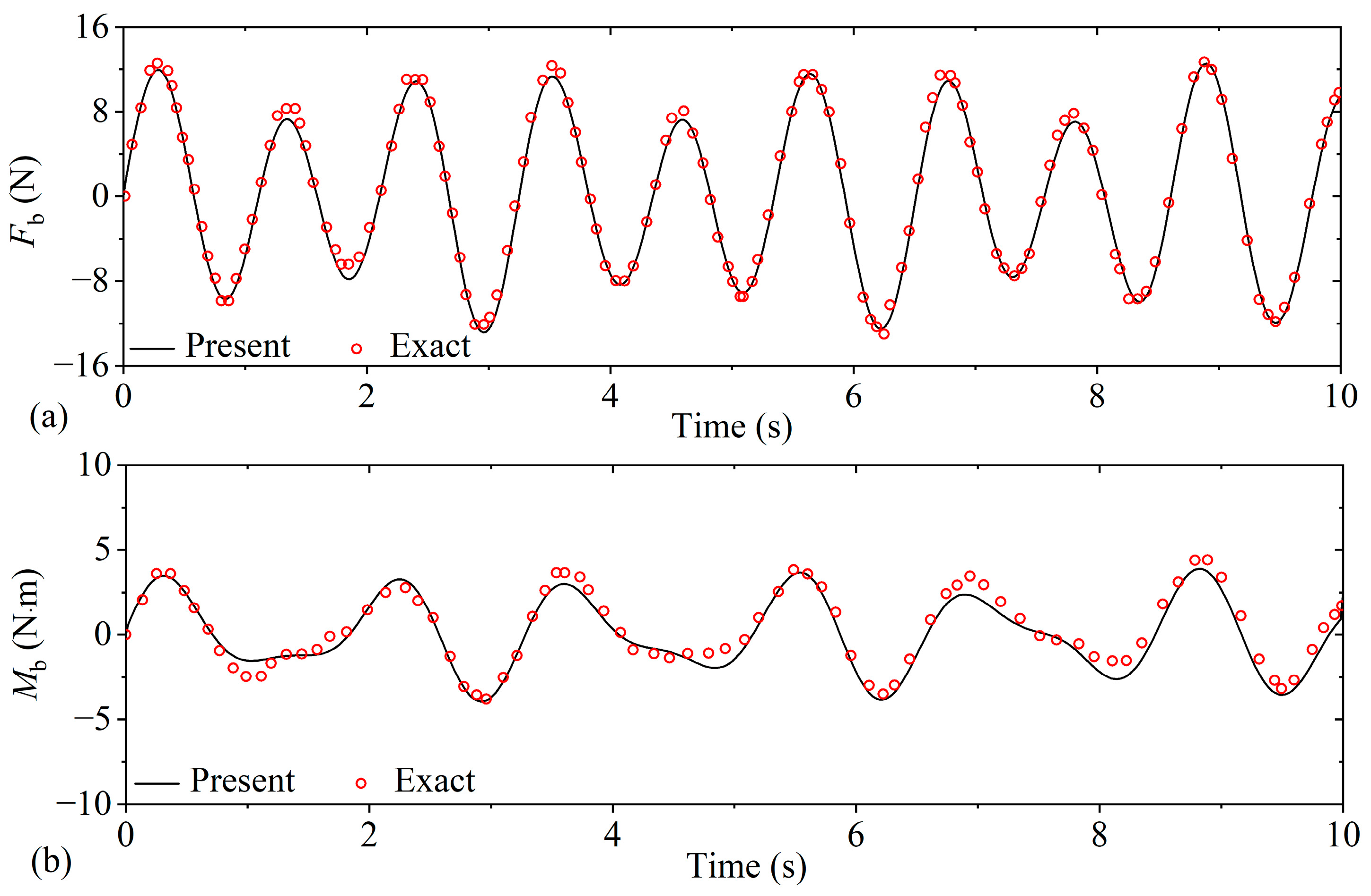
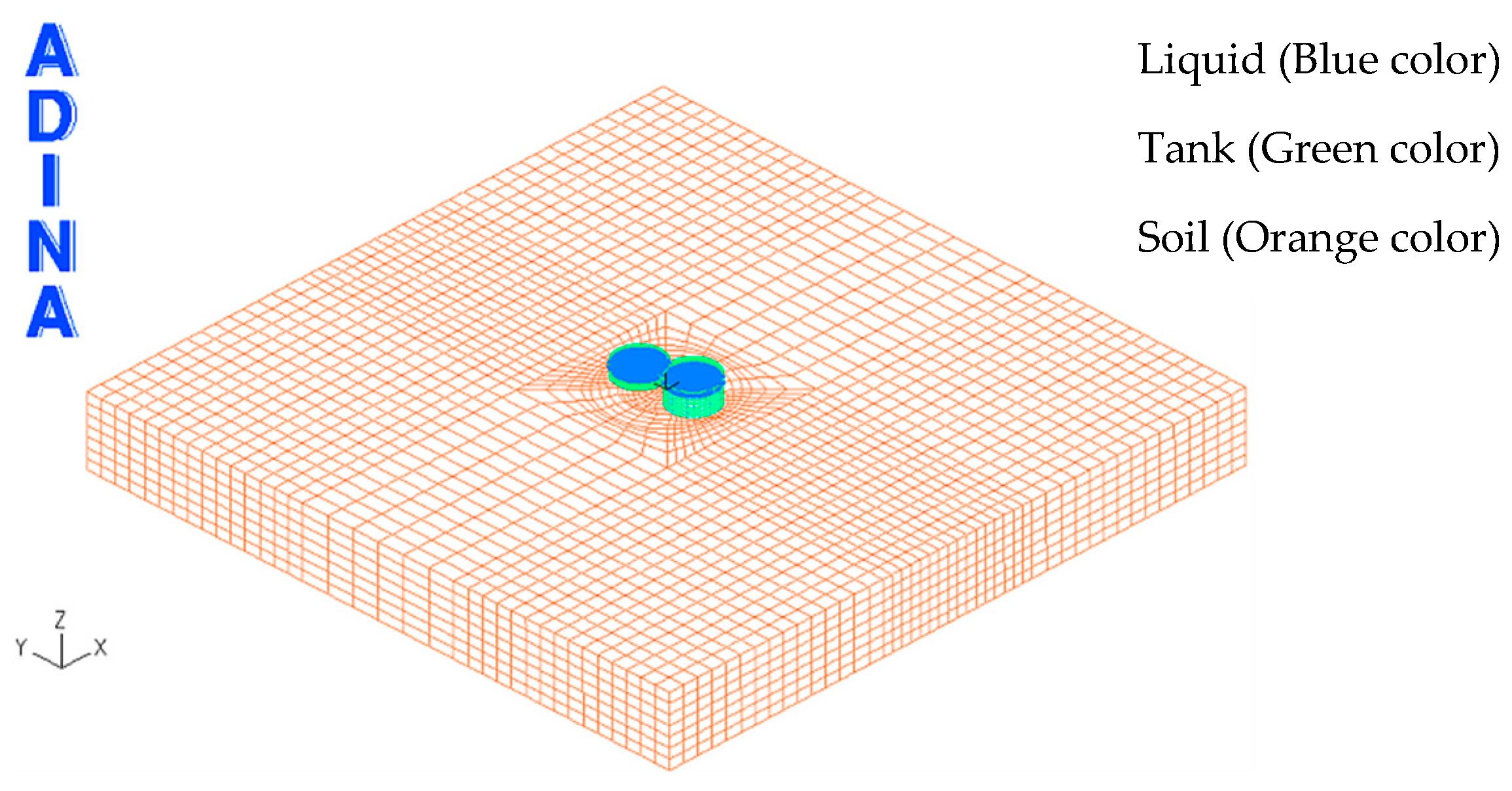
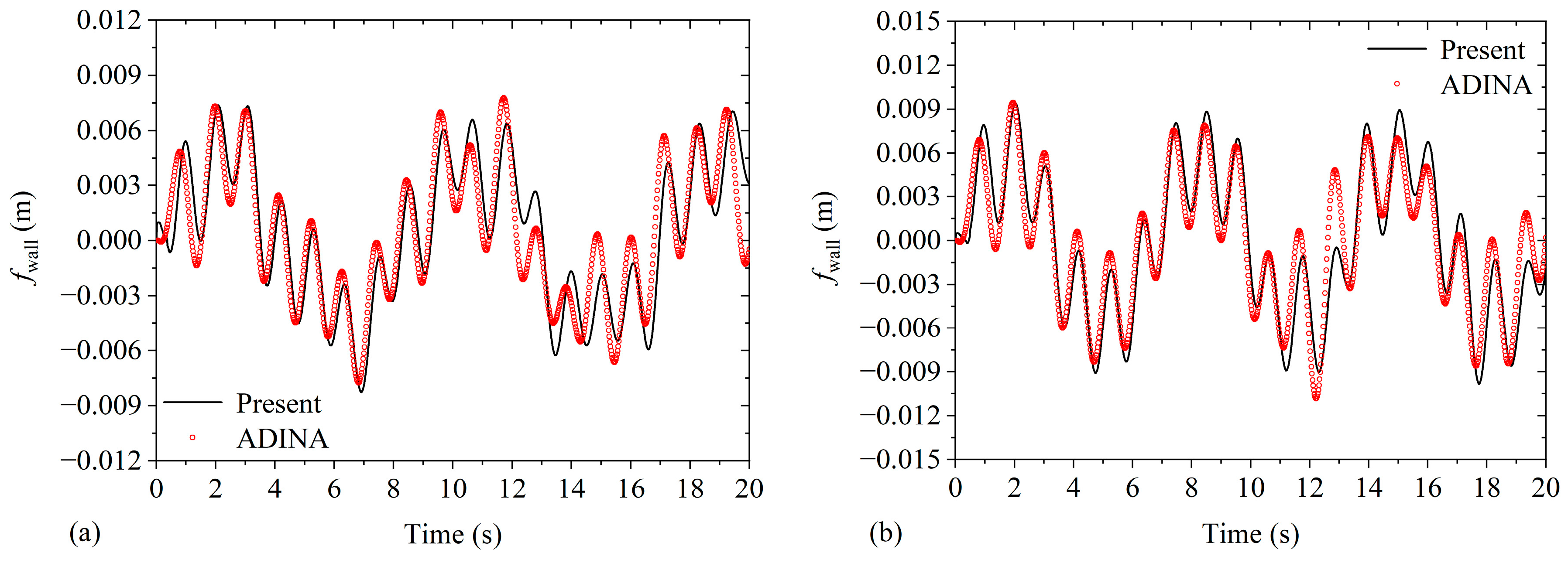
3.2. Response of the Soil–Tank System
4. Parameter Analysis
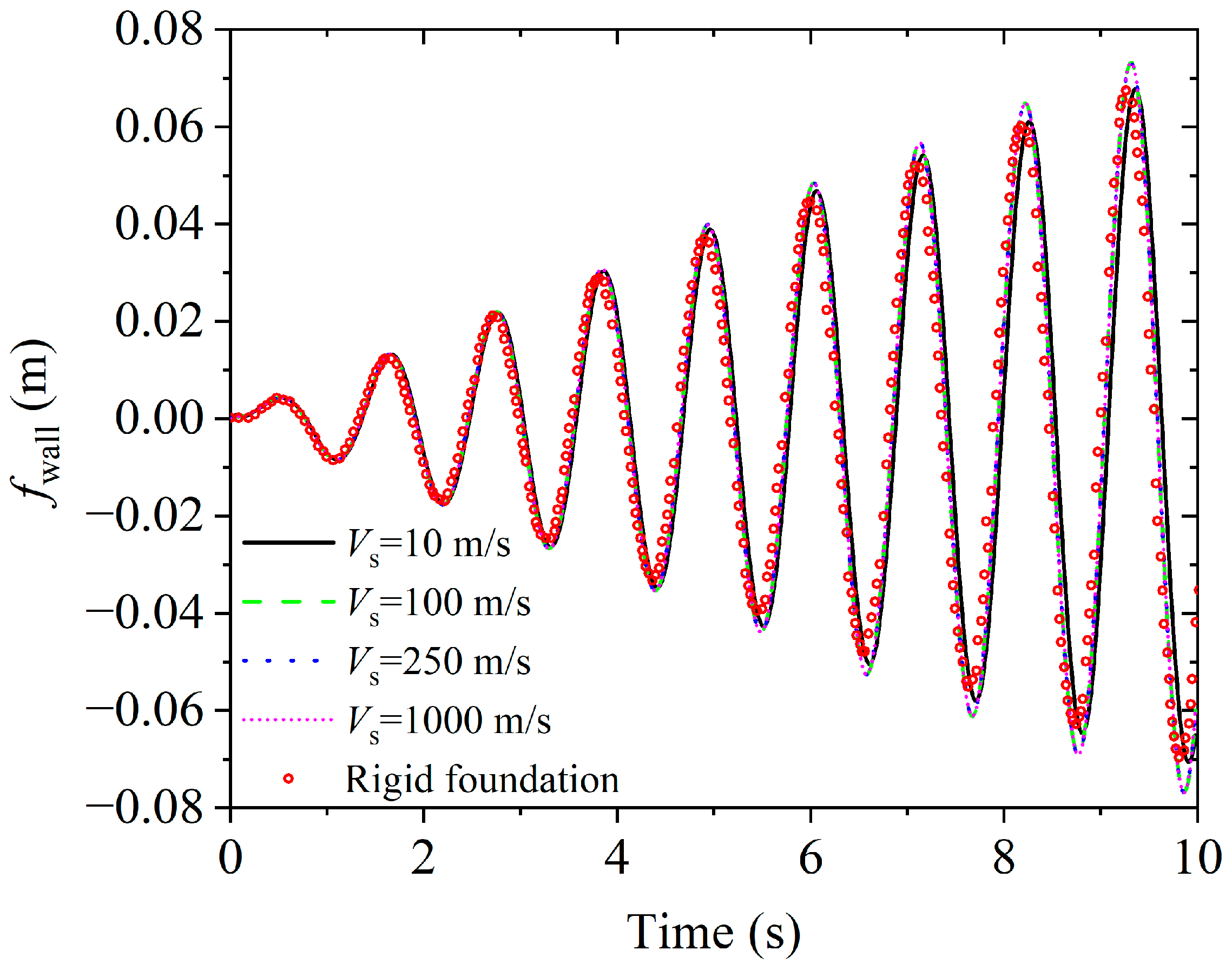
4.1. The Effect of Soil
4.2. The Effect of Baffle
4.3. The Effect of Liquid Height
5. Discussion
6. Conclusions
- (1)
- The impulsive frequency keeps increasing linearly with the increase in soil stiffness. Soils with different stiffnesses have little influence on the sloshing height; however, soil–structure interaction can exert a remarkable effect on the base response of multiple tanks. The base shear and moment both vary non-monotonically with the growth of the soil’s stiffness;
- (2)
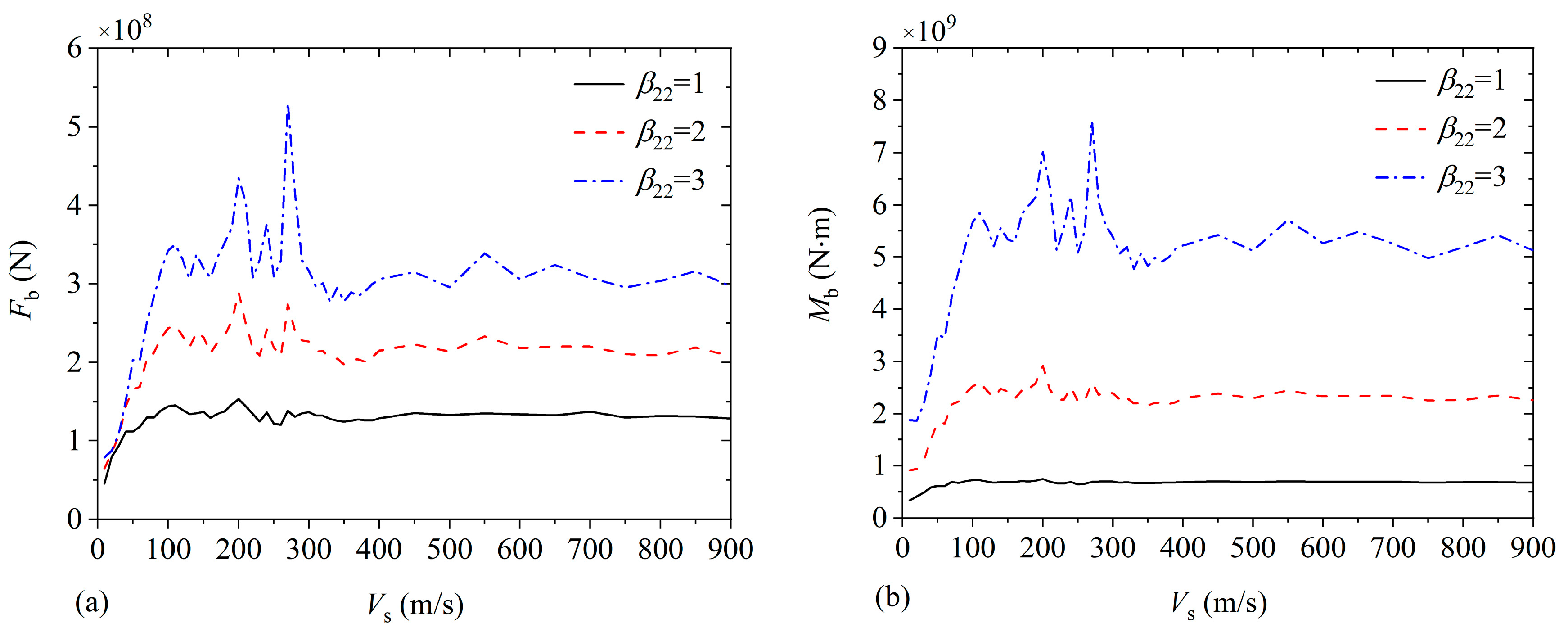
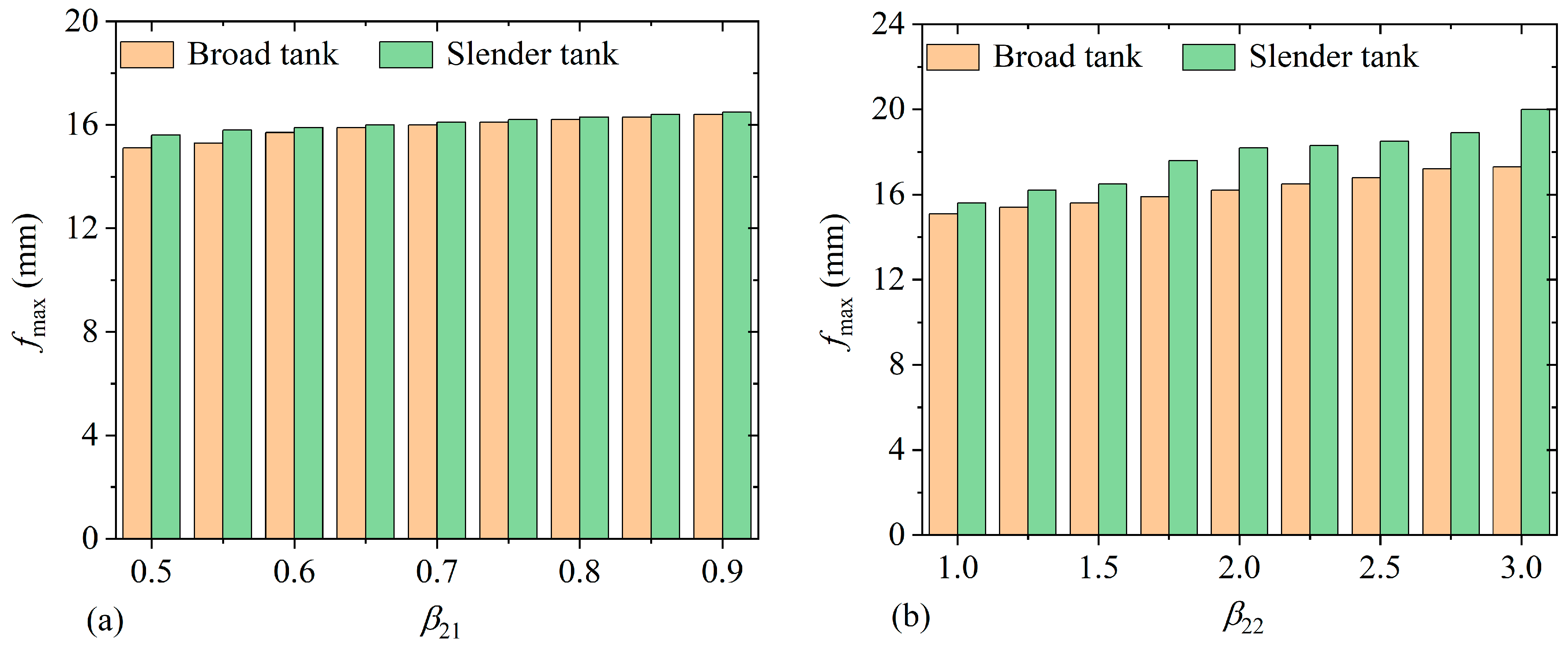
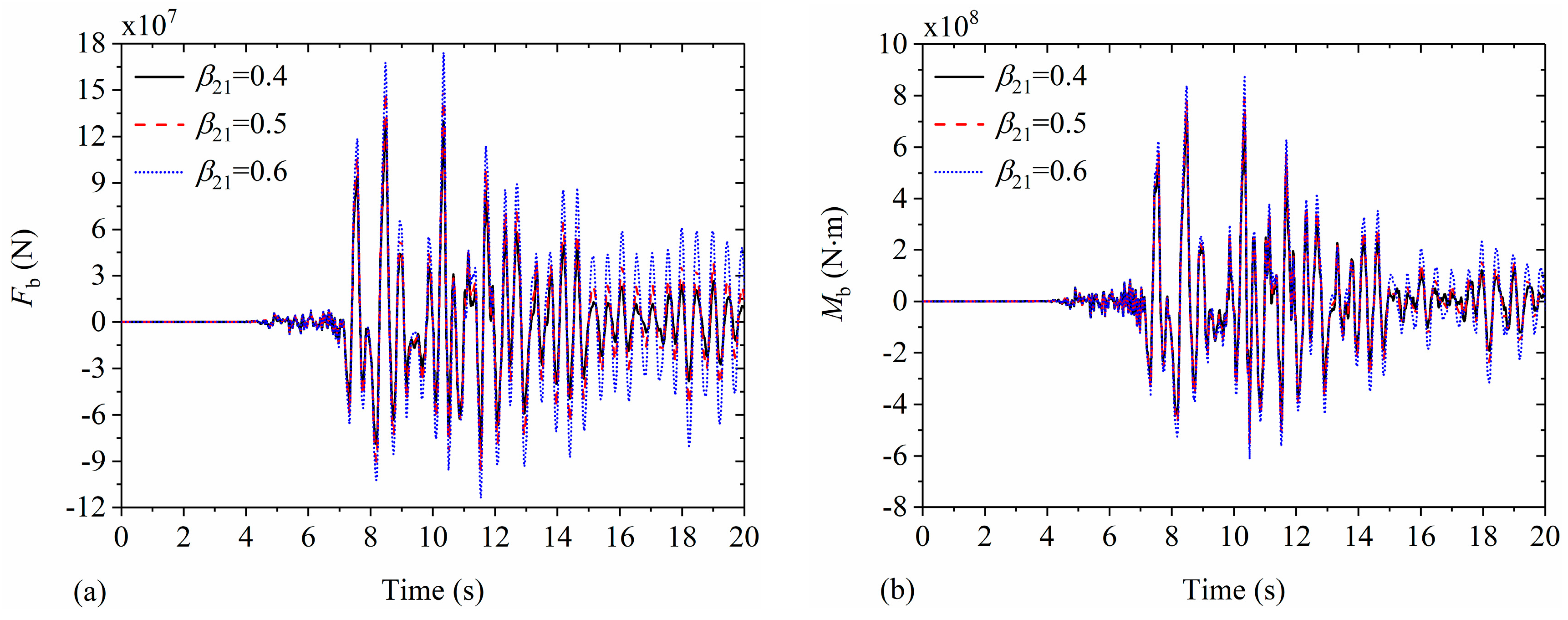
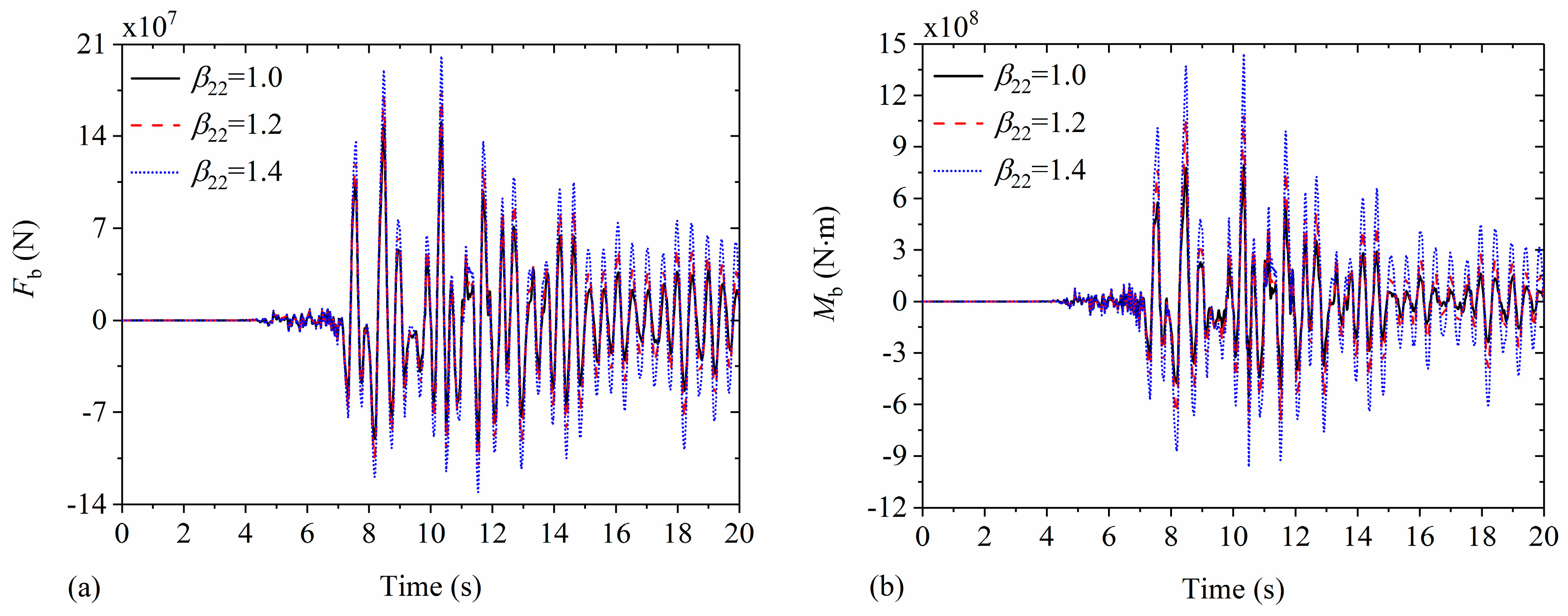
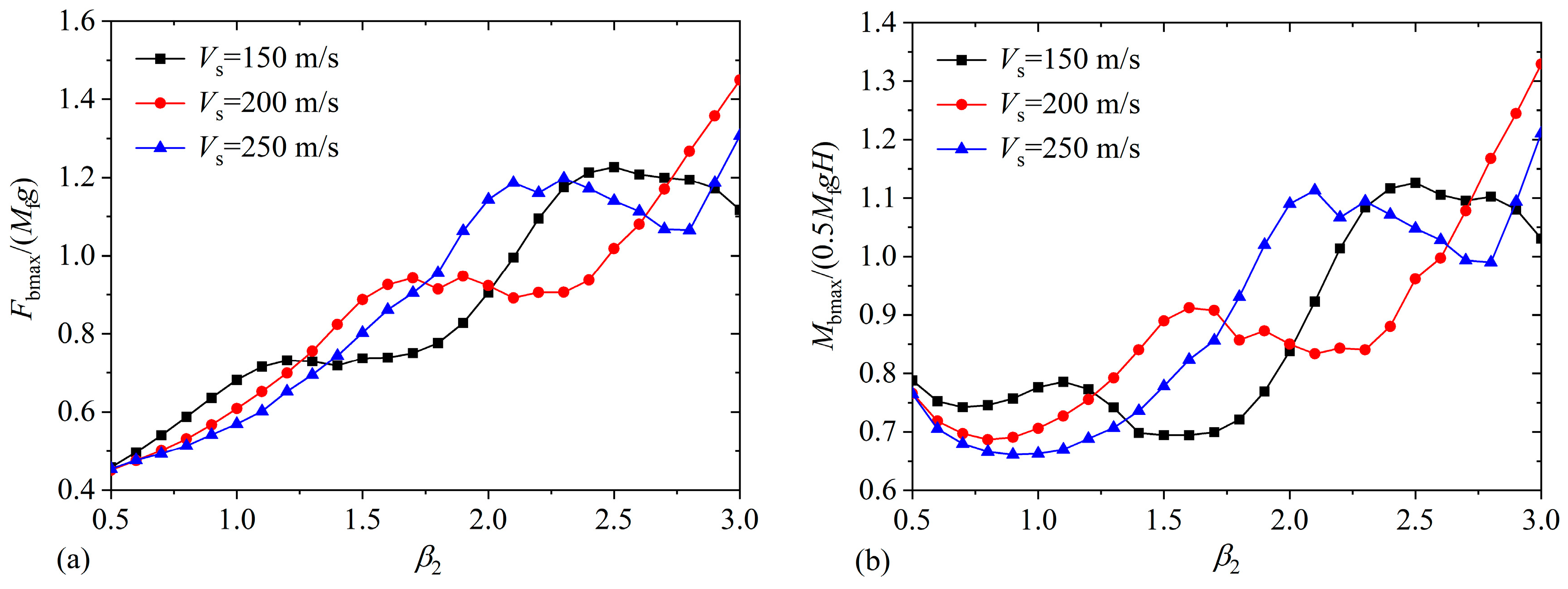
- By increasing the nondimensional baffle location, the maximum base shear increases; however, the maximum base overturning moment varies non-monotonically. The maximum base shear and moment under near-fault seismic excitation are greater than those under far-fault seismic excitation;
- (3)
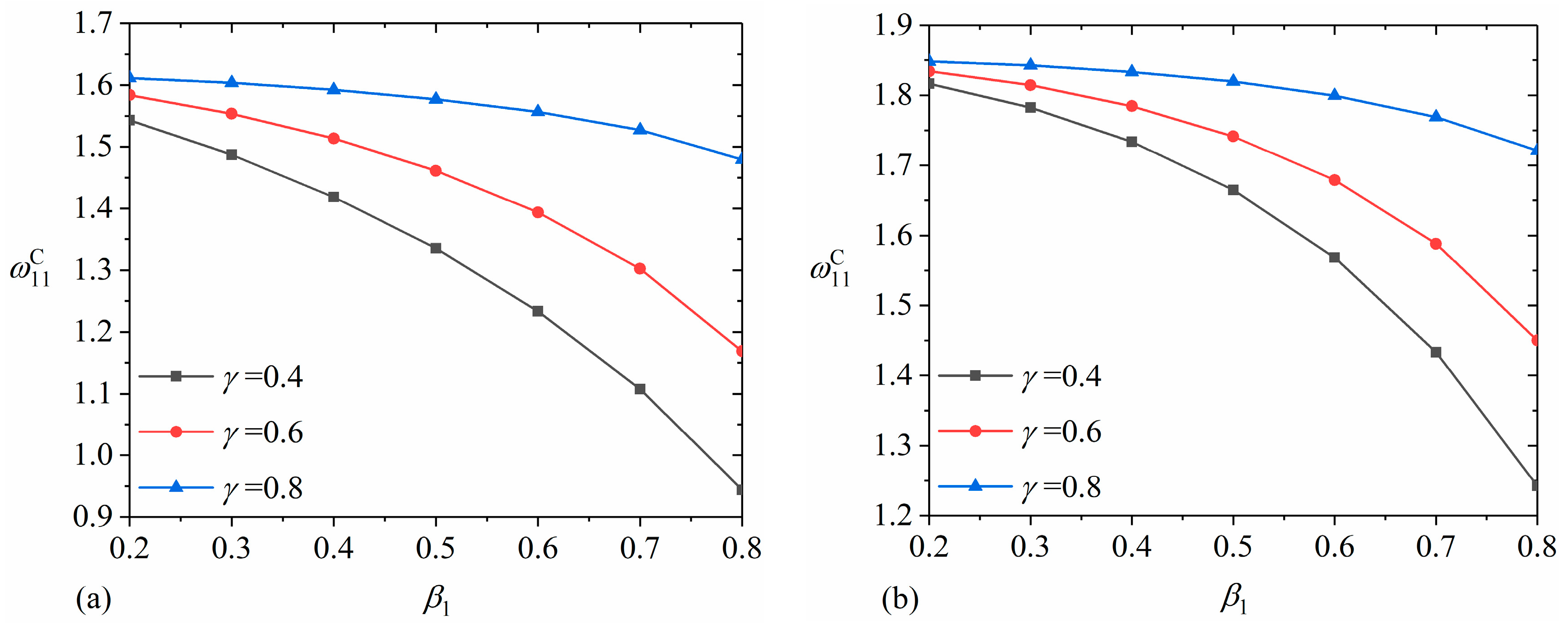
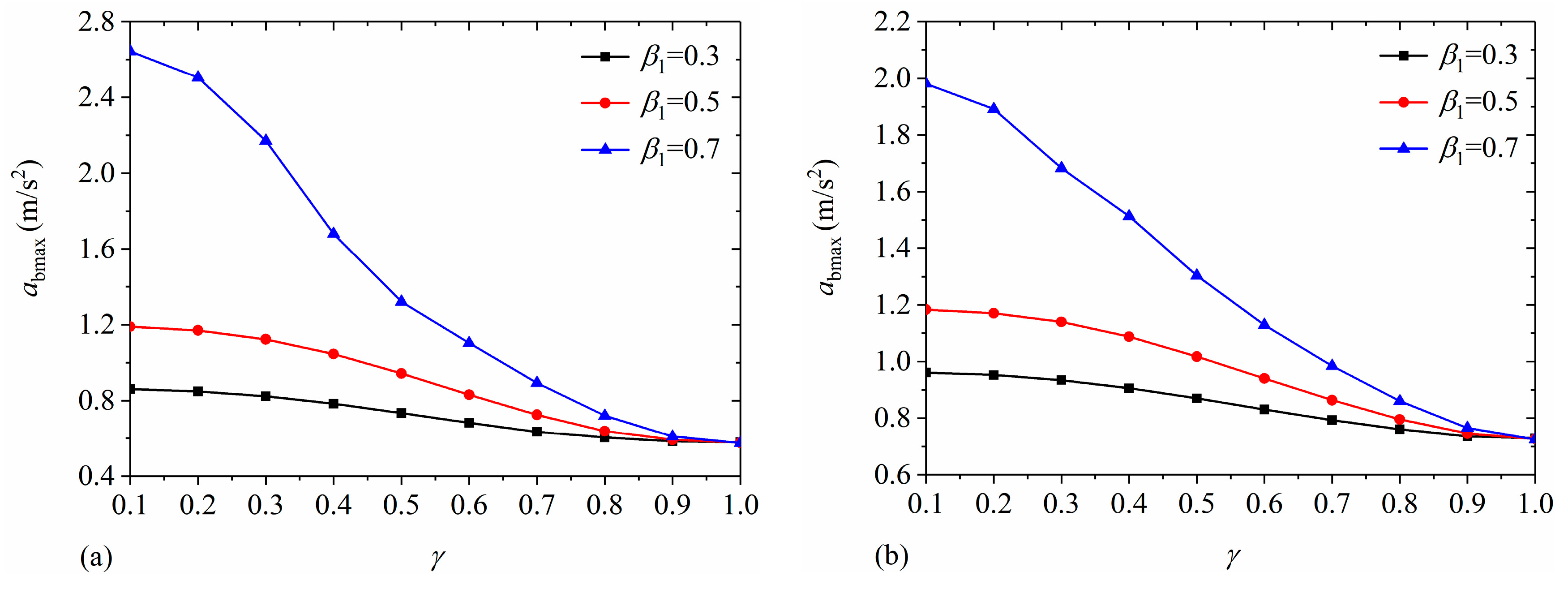
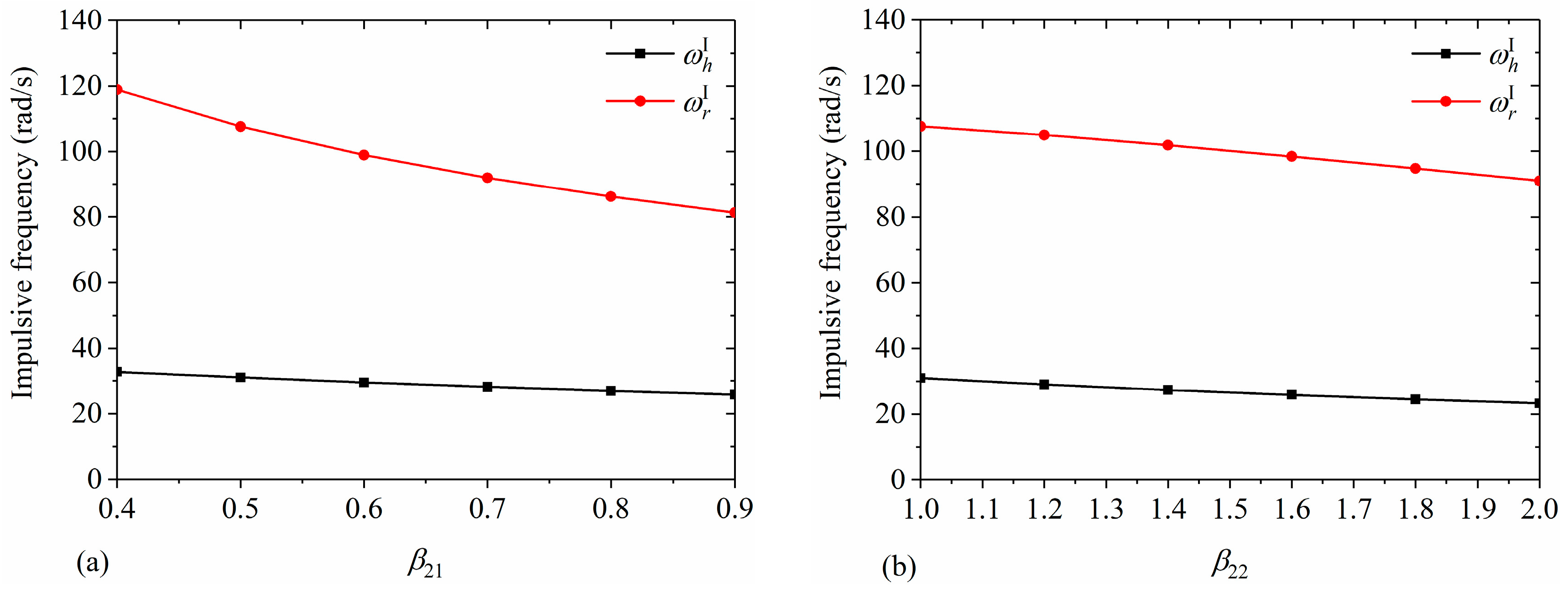
- The impulsive frequencies of the base diminish with the growth of the nondimensional liquid height. The non-monotonical variation for the normalized base responses occurs at the larger liquid height in terms of the greater soil shear-wave velocity. The results show that the maximum base shear and moment subjected to near-fault seismic activity could increase, respectively, 33.56% and 81.45% with the growth of the liquid height of the slender tank on soft soil.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Zhao, Y.; Li, H.-N.; Fu, X.; Zhang, S.; Mercan, O. Seismic analysis of a large LNG tank considering the effect of liquid volume. Shock Vib. 2020, 2020, 8889055. [Google Scholar] [CrossRef]
- Xiao, C.; Wu, Z.; Chen, K.; Tang, Y.; Yan, Y. Development of a water supplement system for a tuned liquid damper under excitation. Buildings 2023, 13, 1115. [Google Scholar] [CrossRef]
- Cheng, X.; Jing, W.; Li, D. Dynamic response of concrete tanks under far-field, long-period earthquakes. Proc. Inst. Civ. Eng. Struct. Build. 2021, 174, 41–54. [Google Scholar] [CrossRef]
- Xu, B.; Han, Z.; Wang, L.; Liu, Q.; Xu, X.; Chen, H. The influence of integral water tank on the seismic performance of slender structure: An experimental study. Buildings 2023, 13, 736. [Google Scholar] [CrossRef]
- Tsao, W.-H.; Huang, L.-H.; Hwang, W.-S. An equivalent mechanical model with nonlinear damping for sloshing rectangular tank with porous media. Ocean Eng. 2021, 242, 110145. [Google Scholar] [CrossRef]
- Luo, D.; Liu, C.; Sun, J.; Cui, L.; Wang, Z. Sloshing effect analysis of liquid storage tank under seismic excitation. Structures 2022, 43, 40–58. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Looi, D.T. Analytical H∞ and H2 optimization for negative-stiffness inerter-based systems. Int. J. Mech. Sci. 2023, 249, 108261. [Google Scholar] [CrossRef]
- Bellezi, C.A.; Cheng, L.-Y.; Nishimoto, K. A numerical study on sloshing mitigation by vertical floating rigid baffle. J. Fluids Struct. 2022, 109, 103456. [Google Scholar] [CrossRef]
- Baghban, M.H.; Razavi Tosee, S.V.; Valerievich, K.A.; Najafi, L.; Faridmehr, I. Seismic analysis of baffle-reinforced elevated storage tank using finite element method. Buildings 2022, 12, 549. [Google Scholar] [CrossRef]
- Cho, I.H.; Kim, M.H. Effect of a bottom-hinged, top-tensioned porous membrane baffle on the sloshing reduction in a rectangular tank. Appl. Ocean Res. 2020, 104, 102345. [Google Scholar] [CrossRef]
- Wang, Z.; Han, F.; Liu, Y.; Li, W. Evolution process of liquefied natural gas from stratification to rollover in tanks of coastal engineering with the influence of baffle structure. J. Mar. Sci. Eng. 2021, 9, 95. [Google Scholar] [CrossRef]
- Yu, L.; Xue, M.-A.; Zhu, A. Numerical investigation of sloshing in rectangular tank with permeable baffle. J. Mar. Sci. Eng. 2020, 8, 671. [Google Scholar] [CrossRef]
- Wang, L.; Xu, M.; Zhang, Q. Numerical investigation of shallow liquid sloshing in a baffled tank and the associated damping effect by BM-MPS method. J. Mar. Sci. Eng. 2021, 9, 1110. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Khalid, M.S.U.; Long, T.; Chang, J.Z.; Liu, M.B. Investigations on sloshing mitigation using elastic baffles by coupling smoothed finite element method and decoupled finite particle method. J. Fluids Struct. 2020, 94, 102942. [Google Scholar] [CrossRef]
- Xue, M.-A.; Zheng, J.; Lin, P.; Xiao, Z. Violent transient sloshing-wave interaction with a baffle in a three-dimensional numerical tank. J. Ocean Univ. China. 2017, 16, 661–673. [Google Scholar] [CrossRef]
- Xue, M.-A.; Jiang, Z.; Hu, Y.-A.; Yuan, X. Numerical study of porous material layer effects on mitigating sloshing in a membrane LNG tank. Ocean Eng. 2020, 218, 108240. [Google Scholar] [CrossRef]
- Al-Yacouby, A.M.; Ahmed, M.M. A numerical study on the effects of perforated and imperforate baffles on the sloshing pressure of a rectangular tank. J. Mar. Sci. Eng. 2022, 10, 1335. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, Q.; Lu, L.; Xia, D.; Zhang, W.; Yan, H. CFD analysis of sine baffles on flow mixing and power consumption in stirred tank. Appl. Sci. 2022, 12, 5743. [Google Scholar] [CrossRef]
- Wang, Z.-H.; Jiang, S.-C.; Bai, W.; Li, J.-X. Liquid sloshing in a baffled rectangular tank under irregular excitations. Ocean Eng. 2023, 278, 114472. [Google Scholar] [CrossRef]
- George, A.; Cho, I.H. Optimal design of vertical porous baffle in a swaying oscillating rectangular tank using a machine learning model. Ocean Eng. 2022, 244, 110408. [Google Scholar] [CrossRef]
- Wang, J.D.; Zhou, D.; Liu, W.Q. Sloshing of liquid in rigid cylindrical container with a rigid annular baffle. Part I: Free vibration. Shock Vib. 2012, 19, 1185–1203. [Google Scholar] [CrossRef]
- Wang, J.D.; Zhou, D.; Liu, W.Q. Sloshing of liquid in rigid cylindrical container with a rigid annular baffle. Part II: Lateral excitation. Shock Vib. 2012, 19, 1205–1222. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, D.; Wang, J. An equivalent mechanical model for fluid sloshing in a rigid cylindrical tank equipped with a rigid annular baffle. Appl. Math. Model. 2019, 72, 569–587. [Google Scholar] [CrossRef]
- Pooraskarparast, B.; Bento, A.M.; Baron, E.; Matos, J.C.; Dang, S.N.; Fernandes, S. Fluid–soil–structure interactions in semi-buried tanks: Quantitative and qualitative analysis of seismic behaviors. Appl. Sci. 2023, 13, 8891. [Google Scholar] [CrossRef]
- Lee, C.-B.; Lee, J.-H. Nonlinear dynamic response of a concrete rectangular liquid storage tank on rigid soil subjected to three-directional ground motion. Appl. Sci. 2021, 11, 4688. [Google Scholar] [CrossRef]
- Jing, W.; Shen, J.; Cheng, X.; Yang, W. Seismic responses of a liquid storage tank considering structure-soil-structure interaction. Structures. 2022, 45, 2137–2150. [Google Scholar] [CrossRef]
- Park, G.; Jung, J.; Yoon, H. Structural finite element model updating considering soil-structure interaction using ls-dyna in loop. Sci. Rep. 2023, 13, 4753. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Ding, Y.; Xu, J.; Chen, Y.; Wu, B. A shaking table substructure testing method for the structural seismic evaluation considering soil-structure interactions. Adv. Struct. Eng. 2020, 23, 3024–3036. [Google Scholar] [CrossRef]
- Bi, Z.; Zhang, L.; He, X.; Zhai, Y. Effect of oblique incidence angle and frequency content of P and SV waves on the dynamic behavior of liquid tanks. Soil Dyn. Earthq. Eng. 2023, 171, 107929. [Google Scholar] [CrossRef]
- Jaramillo, F.; Almazán, J.L.; Colombo, J.I. Effects of the anchor bolts and soil flexibility on the seismic response of cylindrical steel liquid storage tanks. Eng. Struct. 2022, 263, 114353. [Google Scholar] [CrossRef]
- Rezaiee-Pajand, M.; Mirjalili, Z.; Sadegh Kazemiyan, M. Analytical 2D model for the liquid storage rectangular tank. Eng. Struct. 2023, 289, 116215. [Google Scholar] [CrossRef]
- Hashemi, S.; Kianoush, R.; Khoubani, M. A mechanical model for soil-rectangular tank interaction effects under seismic loading. Soil Dyn. Earthq. Eng. 2022, 153, 107092. [Google Scholar] [CrossRef]
- Lyu, Y.; Sun, J.; Sun, Z.; Cui, L.; Wang, Z. Simplified mechanical model for seismic design of horizontal storage tank considering soil-tank-liquid interaction. Ocean Eng. 2020, 198, 106953. [Google Scholar] [CrossRef]
- Mykoniou, K.; Butenweg, C.; Holtschoppen, B.; Klinkel, S. Seismic response analysis of adjacent liquid-storage tanks. Earthq. Eng. Struct. Dyn. 2016, 45, 1779–1796. [Google Scholar] [CrossRef]
- Luco, J.E.; Mita, A. Response of a circular foundation on a uniform half-space to elastic waves. Earthq. Eng. Struct. Dyn. 1987, 15, 105–118. [Google Scholar] [CrossRef]
- Wu, W.; Lee, W. Nested lumped-parameter models for foundation vibrations. Earthq. Eng. Struct. Dyn. 2004, 33, 1051–1058. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, D.; Liu, W.; Wang, S. Nested lumped-parameter model for foundation with strongly frequency-dependent impedance. J. Earthq. Eng. 2016, 20, 975–991. [Google Scholar] [CrossRef]
- Meng, X.; Zhou, D.; Lim, Y.M.; Wang, J.; Huo, R. Seismic response of rectangular liquid container with dual horizontal baffles on deformable soil foundation. J. Earthq. Eng. 2023, 27, 1943–1972. [Google Scholar] [CrossRef]
- Chaithra, M.; Krishnamoorthy, A.; Avinash, A.R. A review on the modelling techniques of liquid storage tanks considering fluid–structure–soil interaction effects with a focus on the mitigation of seismic effects through base isolation techniques. Sustainability 2023, 15, 11040. [Google Scholar] [CrossRef]
- Hernandez-Hernandez, D.; Larkin, T.; Chouw, N.; Banide, Y. Experimental findings of the suppression of rotary sloshing on the dynamic response of a liquid storage tank. J. Fluids Struct. 2020, 96, 103007. [Google Scholar] [CrossRef]
- Du, X.; Zhao, M. Stability and identification for rational approximation of frequency response function of unbounded soil. Earthq. Eng. Struct. Dyn. 2010, 39, 165–186. [Google Scholar] [CrossRef]
- Biswal, K.C.; Bhattacharyya, S.K.; Sinha, P.K. Non-linear sloshing in partially liquid filled containers with baffles. Int. J. Numer. Methods Eng. 2006, 68, 317–337. [Google Scholar] [CrossRef]
- Sharma, N.; Dasgupta, K.; Dey, A. Optimum lateral extent of soil domain for dynamic SSI analysis of RC framed buildings on pile foundations. Front. Struct. Civ. Eng. 2020, 14, 62–81. [Google Scholar] [CrossRef]
- Kumar, H.; Saha, S.K. Effects of soil-structure interaction on seismic response of fixed base and base isolated liquid storage tanks. J. Earthq. Eng. 2022, 26, 6148–6171. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Stiffness | Coefficients | Damping | ||||
|---|---|---|---|---|---|---|---|
| Horizontal | Rocking | Coupling | Horizontal | Rocking | Coupling | ||
| 0.0228 | 10.1443 | −17.9219 | 0.6087 | 0.3240 | 0.2100 | ||
| −0.0237 | −2.3112 | 14.4598 | −0.0007 | 0.2408 | −3.2432 | ||
| −2.6666 | 2.7886 | 3.3592 | 0.0715 | −0.5935 | 2.3946 | ||
| 0.0918 | −0.5068 | −1.4551 | −0.0844 | 0.2458 | −0.3367 | ||
| −0.0537 | −0.1302 | 17.5500 | 0.0115 | −0.3857 | 0.8684 | ||
| 0.0498 | 0.1224 | 0.5198 | −0.0212 | 0.0044 | −1.0668 | ||
| −0.0397 | −11.7026 | −0.8707 | 0.0127 | 1.0363 | −0.4268 | ||
| −0.0977 | −0.1990 | 0.8167 | −0.0338 | −0.9123 | 0.0270 | ||
| 1.4040 | 0.2217 | 1.5495 | −0.0411 | −0.0112 | 1.9549 | ||
| 0.0120 | 0.0005 | −1.7211 | 0.0507 | 0.0805 | −0.8394 | ||
| - | - | - | - | −0.0232 | 0.0064 | 0.6216 | |
| 1 | 0.7515 | 0.7515 | 0.5549 + 0.7283i | 0.9156 |
| 2 | −0.0867 + 0.4438i | 0.4522 | 0.5549 − 0.7283i | 0.9156 |
| 3 | −0.0867 − 0.4438i | 0.4522 | −0.1816 + 0.7132i | 0.7359 |
| 4 | −0.1891 | 0.1891 | −0.1816 − 0.7132i | 0.7359 |
| 5 | −0.0509 | 0.0509 | 0.0616 + 0.7288i | 0.7314 |
| 6 | - | - | 0.0616 − 0.7288i | 0.7314 |
| 7 | - | - | −0.2303 + 0.3120i | 0.3878 |
| 8 | - | - | −0.2303 − 0.3120i | 0.3878 |
| 9 | - | - | −0.2327 + 0.0892i | 0.2492 |
| 10 | - | - | −0.2327 − 0.0892i | 0.2492 |
| 11 | - | - | 0.0860 | 0.0860 |
| Frequency | Broad Tank | Slender Tank | ||||
|---|---|---|---|---|---|---|
| Present | 0.7360 | 1.9673 | 2.6415 | 0.9423 | 2.1905 | 2.8442 |
| ADINA | 0.7559 | 2.0156 | 2.7282 | 0.9632 | 2.2242 | 2.9211 |
| Errors | −2.63% | −2.40% | −3.18% | −2.17% | −1.52% | −2.63% |
| Broad Tank | Slender Tank | |||
|---|---|---|---|---|
| 50 | 0.7529 | 1.7191 | 0.9207 | 1.8392 |
| 100 | 0.7521 | 1.7185 | 0.9180 | 1.8393 |
| 150 | 0.7519 | 1.7184 | 0.9174 | 1.8393 |
| 200 | 0.7519 | 1.7183 | 0.9172 | 1.8393 |
| 300 | 0.7518 | 1.7183 | 0.9170 | 1.8393 |
| Rigid | 0.7518 | 1.7183 | 0.9169 | 1.8393 |
| Earthquake | RSN | Event | Year | Station | Record | PGA (g) |
|---|---|---|---|---|---|---|
| NF | 1106 | Kobe | 1995 | KJMA | KJM-000 | 0.834 |
| FF | 132 | Friuli | 1976 | Forgaria Cornino | FOC-000 | 0.261 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Meng, X.; Zhang, Z.; Gu, Z.; Wang, J.; Zhou, D. Liquid Sloshing in Soil-Supported Multiple Cylindrical Tanks Equipped with Baffle under Horizontal Excitation. Buildings 2024, 14, 1029. https://doi.org/10.3390/buildings14041029
Sun Y, Meng X, Zhang Z, Gu Z, Wang J, Zhou D. Liquid Sloshing in Soil-Supported Multiple Cylindrical Tanks Equipped with Baffle under Horizontal Excitation. Buildings. 2024; 14(4):1029. https://doi.org/10.3390/buildings14041029
Chicago/Turabian StyleSun, Ying, Xun Meng, Zhong Zhang, Zhenyuan Gu, Jiadong Wang, and Ding Zhou. 2024. "Liquid Sloshing in Soil-Supported Multiple Cylindrical Tanks Equipped with Baffle under Horizontal Excitation" Buildings 14, no. 4: 1029. https://doi.org/10.3390/buildings14041029
APA StyleSun, Y., Meng, X., Zhang, Z., Gu, Z., Wang, J., & Zhou, D. (2024). Liquid Sloshing in Soil-Supported Multiple Cylindrical Tanks Equipped with Baffle under Horizontal Excitation. Buildings, 14(4), 1029. https://doi.org/10.3390/buildings14041029