
Extended-State-Observer-Based Super Twisting Control for Pneumatic Muscle Actuators



Abstract
:1. Introduction
2. Problem Formulation
3. Extended-State-Observer-Based Super Twisting Control for PMAs
3.1. Extended-State-Observer
3.2. Extended-State-Observer-Based Super Twisting Control
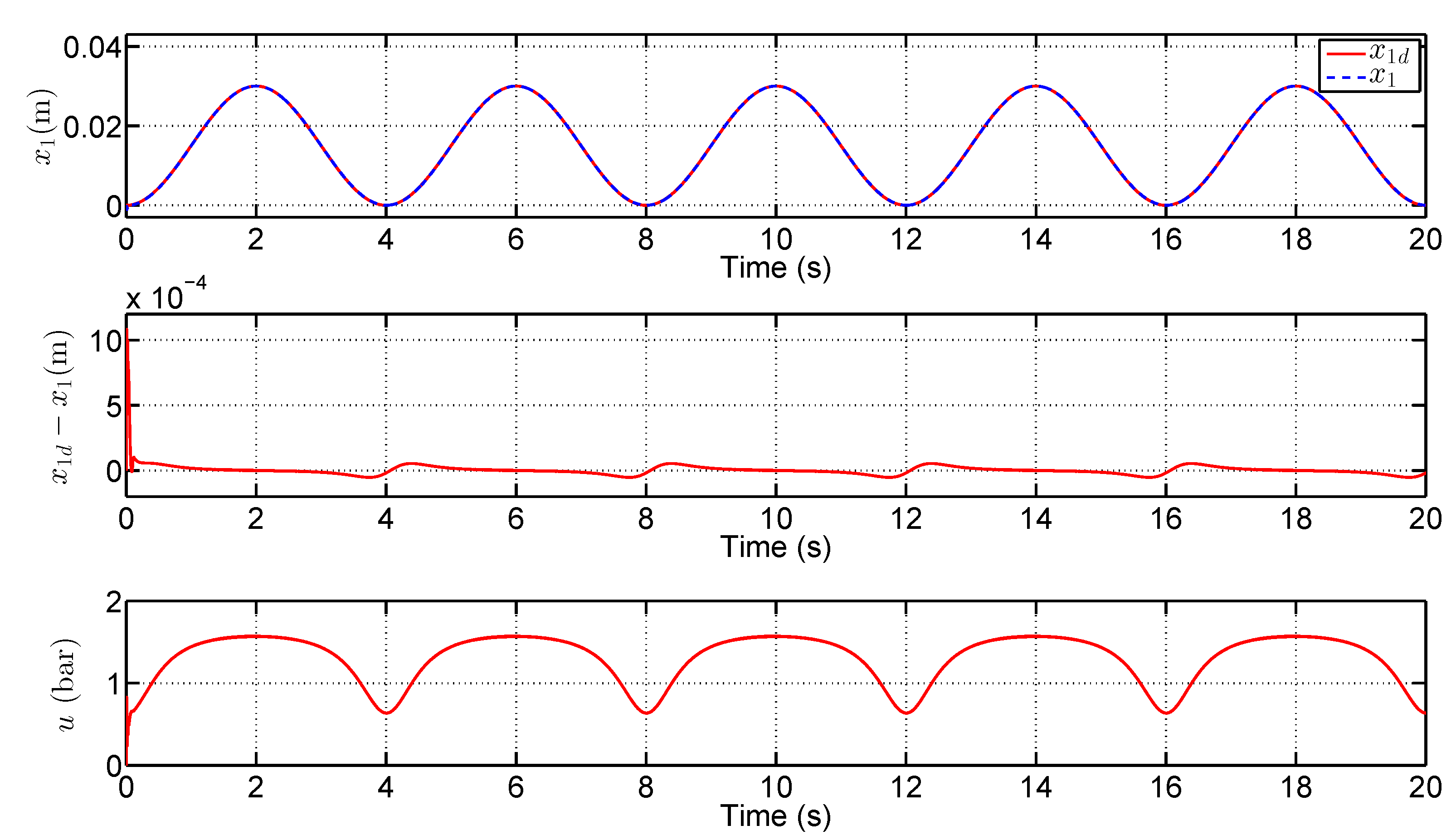
4. Simulation Studies
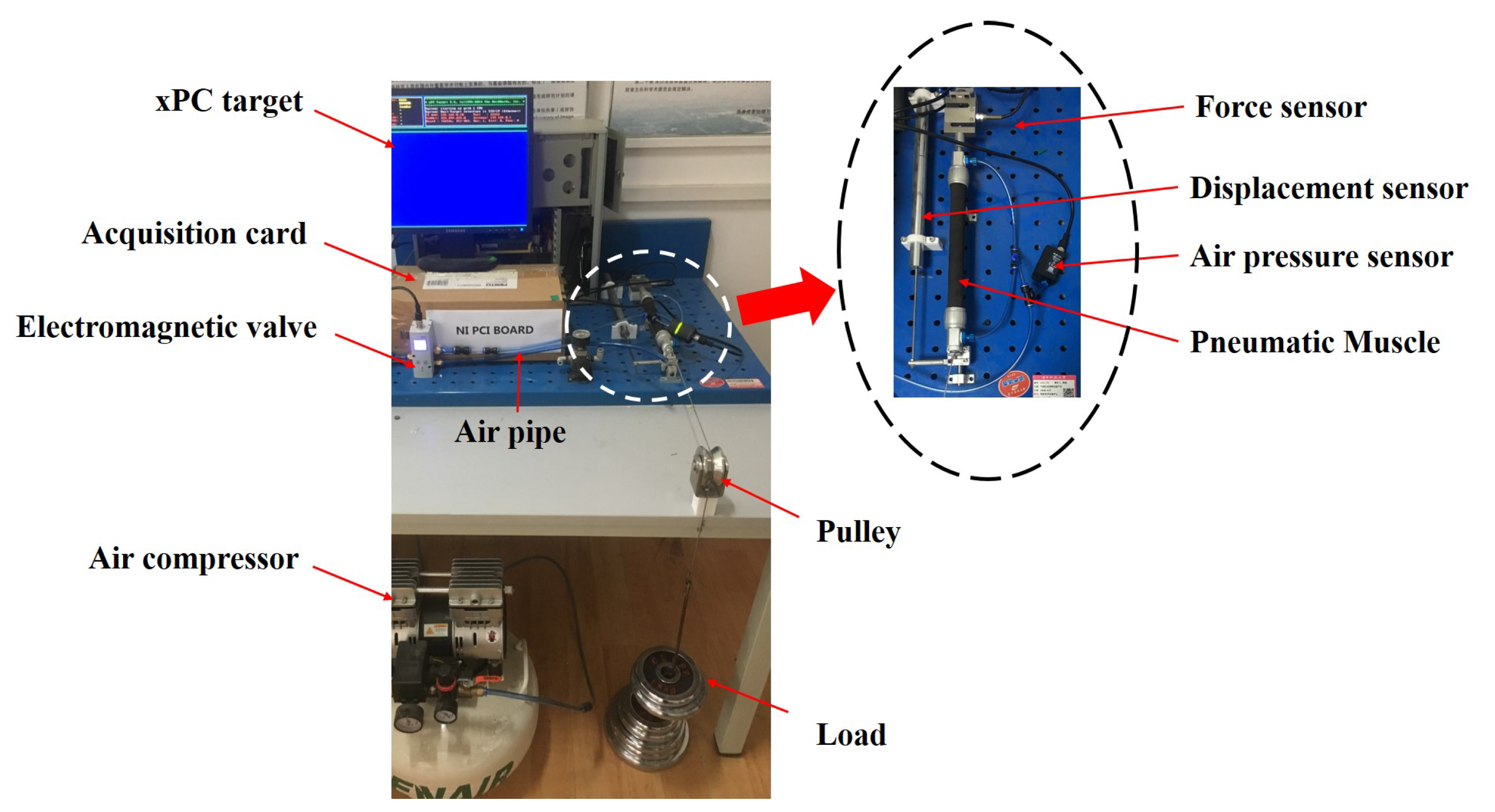
5. Experimental Studies
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PMA | Pneumatic Muscle Actuator |
| SMC | Sliding Mode Control |
| ESO | Extended-state-observer |
| STC | Super Twisting Control |
| PID | Proportional-Integral-Derivative |
| ESO-STC | Extended-state-observer-based Super Twisting Control |
References
- Zhang, J.; Sheng, J.; O’Neill, C.T.; Walsh, C.J.; Wood, R.J.; Ryu, J.; Desai, J.P.; Yip, M.C. Robotic artificial muscles: Current progress and future perspectives. IEEE Trans. Robot. 2019, 35, 761–781. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [Green Version]
- Takosoglu, J.E.; Laski, P.A.; Blasiak, S.; Bracha, G.; Pietrala, D. Determining the Static Characteristics of Pneumatic Muscles. Meas. Control. 2016, 49, 62–71. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Huang, J.; Ru, H.; Chen, W.; Xiong, C.-H. A Visual Servo Based Predictive Control with Echo State Gaussian Process for Soft Bending Actuator. IEEE/ASME Trans. Mechatron. 2020. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Huang, J. Neural-network-based nonlinear model predictive tracking control of a pneumatic muscle actuator-driven exoskeleton. IEEE/CAA J. Autom. Sin. 2020, 7, 1478–1488. [Google Scholar] [CrossRef]
- Bharadwaj, K.; Sugar, T.G. Kinematics of a robotic gait trainer for stroke rehabilitation. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3492–3497. [Google Scholar]
- Cao, Y.; Huang, J.; Xiong, C. Single-layer Learning Based Predictive Control with Echo State Network for Pneumatic Muscle Actuators-driven Exoskeleton. IEEE Trans. Cognit. Dev. Syst. 2020. [Google Scholar] [CrossRef]
- Caldwell, D.G.; Medrano-Cerda, G.A.; Goodwin, M. Control of pneumatic muscle actuators. IEEE Control Syst. 1995, 15, 40–48. [Google Scholar]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Advanced Nonlinear PID-Based Antagonistic Control for Pneumatic Muscle Actuators. IEEE Trans. Ind. Electron. 2014, 61, 6926–6937. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, X.; Han, J. Active Model-Based Control for Pneumatic Artificial Muscle. IEEE Trans. Ind. Electron. 2017, 64, 1686–1695. [Google Scholar] [CrossRef]
- Takosoglu, J. Angular position control system of pneumatic artificial muscles. Open Eng. 2020, 10, 681–687. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Xiong, C.-H.; Zhang, H.-T. An echo state Gaussian process-based nonlinear model predictive control for pneumatic muscle actuators. IEEE Trans. Autom. Sci. Eng. 2018, 16, 1071–1084. [Google Scholar] [CrossRef]
- Zhong, J.; Zhou, X.; Luo, M. A New Approach to Modeling and Controlling a Pneumatic Muscle Actuator-Driven Setup Using Back Propagation Neural Networks. Complexity 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- Chen, C.; Huang, J.; Wu, D. Nonlinear Disturbance Observer Based TS Fuzzy Logic Control of Pneumatic Artificial Muscles. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Osaka, Japan, 3–5 July 2019; pp. 12–17. [Google Scholar]
- Nuchkrua, T.; Leephakpreeda, T.; Chen, S.L. Experimental validation for fuzzy control of servo pneumatic artificial muscle driven by metal hydride. Int. J. Fuzzy Syst. 2016, 18, 956–970. [Google Scholar] [CrossRef]
- Sun, N.; Liang, D.; Wu, Y.; Chen, Y.; Qin, Y.; Fang, Y. Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints. IEEE Trans. Ind. Informatics 2019, 16, 969–979. [Google Scholar] [CrossRef]
- Huang, J.; Ri, M.; Wu, D. Interval Type-2 Fuzzy Logic Modeling and Control of a Mobile Two-Wheeled Inverted Pendulum. IEEE Trans. Fuzzy Syst. 2018, 26, 2030–2038. [Google Scholar] [CrossRef]
- Xing, K.; Huang, J.; Wang, Y.; Wu, J.; Xu, Q.; He, J. Tracking control of pneumatic artificial muscle actuators based on sliding mode and non-linear disturbance observer. IET Control Theory Appl. 2010, 4, 2058–2070. [Google Scholar] [CrossRef] [Green Version]
- Aschemann, H.; Schindele, D. Sliding-mode control of a high-speed linear axis driven by pneumatic muscle actuators. IEEE Trans. Ind. Electron. 2008, 55, 3855–3864. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, M.; Ri, S.; Xiong, C.; Li, Z.; Kang, Y. High-Order Disturbance-Observer-Based Sliding Mode Control for Mobile Wheeled Inverted Pendulum Systems. IEEE Trans. Ind. Electron. 2020, 67, 2030–2041. [Google Scholar] [CrossRef]
- Huang, J.; Ri, S.; Fukuda, T.; Wang, Y. A Disturbance Observer Based Sliding Mode Control for a Class of Underactuated Robotic System With Mismatched Uncertainties. IEEE Trans. Autom. Control 2019, 64, 2480–2487. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J.; Xiong, C.-H.; Wu, D.; Zhang, M.; Li, Z.; Hasegawa, Y. Adaptive Proxy-Based Robust Control Integrated With Nonlinear Disturbance Observer for Pneumatic Muscle Actuators. IEEE/ASME Trans. Mechatron. 2020, 25, 1756–1764. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Wang, Y.-W. Adaptive proxy-based sliding mode control for a class of second-order nonlinear systems and its application to pneumatic muscle actuators. ISA Trans. 2020. [Google Scholar] [CrossRef] [PubMed]
- Moreno, J.A.; Osorio, M. Strict Lyapunov Functions for the Super-Twisting Algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Derafa, L.; Benallegue, A.; Fridman, L. Super twisting control algorithm for the attitude tracking of a four rotors UAV. J. Frankl. Inst. 2012, 349, 685–699. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, J.; Cao, Y. Adaptive Super-Twisting Control for Mobile Wheeled Inverted Pendulum Systems. Appl. Sci. 2019, 9, 2508. [Google Scholar] [CrossRef] [Green Version]
- Talole, S.E.; Kolhe, J.P.; Phadke, S.B. Extended-State-Observer-Based Control of Flexible-Joint System With Experimental Validation. IEEE Trans. Ind. Electron. 2010, 57, 1411–1419. [Google Scholar] [CrossRef]
- Reynolds, D.B.; Repperger, D.W.; Phillips, C.A.; Bandry, G. Modeling the dynamic characteristics of pneumatic muscle. Ann. Biomed. Eng. 2003, 31, 310–317. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Z.; Yang, C. Adaptive Neural Network Based Variable Stiffness Control of Uncertain Robotic Systems Using Disturbance Observer. IEEE Trans. Ind. Electron. 2017, 64, 2236–2245. [Google Scholar] [CrossRef] [Green Version]
- Baccioti, A.; Rosier, L. Liapunov Functions and Stability in Control Theory, 2nd ed.; Springer: New York, NY, USA, 2005. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ESO-STC | 4.63 (m) | 1.6 (m) |
| STC | 4.63 (m) | 1.6 (m) |
| PID | 1.3 (m) | 2.6 (m) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Fu, Z.; Zhang, M.; Huang, J. Extended-State-Observer-Based Super Twisting Control for Pneumatic Muscle Actuators. Actuators 2021, 10, 35. https://doi.org/10.3390/act10020035
Cao Y, Fu Z, Zhang M, Huang J. Extended-State-Observer-Based Super Twisting Control for Pneumatic Muscle Actuators. Actuators. 2021; 10(2):35. https://doi.org/10.3390/act10020035
Chicago/Turabian StyleCao, Yu, Zhongzheng Fu, Mengshi Zhang, and Jian Huang. 2021. "Extended-State-Observer-Based Super Twisting Control for Pneumatic Muscle Actuators" Actuators 10, no. 2: 35. https://doi.org/10.3390/act10020035
APA StyleCao, Y., Fu, Z., Zhang, M., & Huang, J. (2021). Extended-State-Observer-Based Super Twisting Control for Pneumatic Muscle Actuators. Actuators, 10(2), 35. https://doi.org/10.3390/act10020035