
Energy Efficiency and Performance Evaluation of an Exterior-Rotor Brushless DC Motor and Drive System across the Full Operating Range


Abstract
:1. Introduction
2. Materials and Methods
2.1. System Architecture
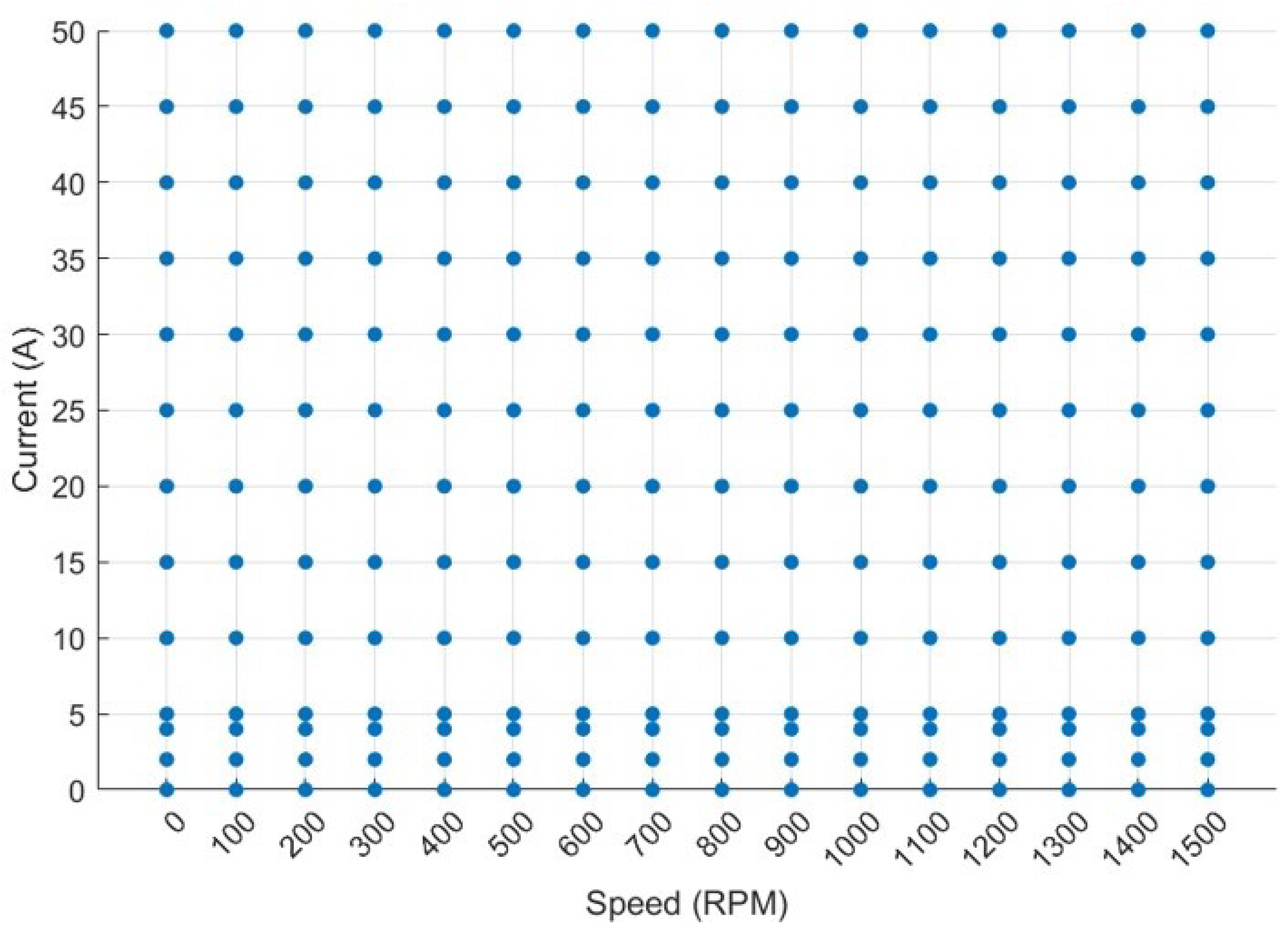
2.2. Efficiency and Loss Mapping Procedure
3. Results and Discussion
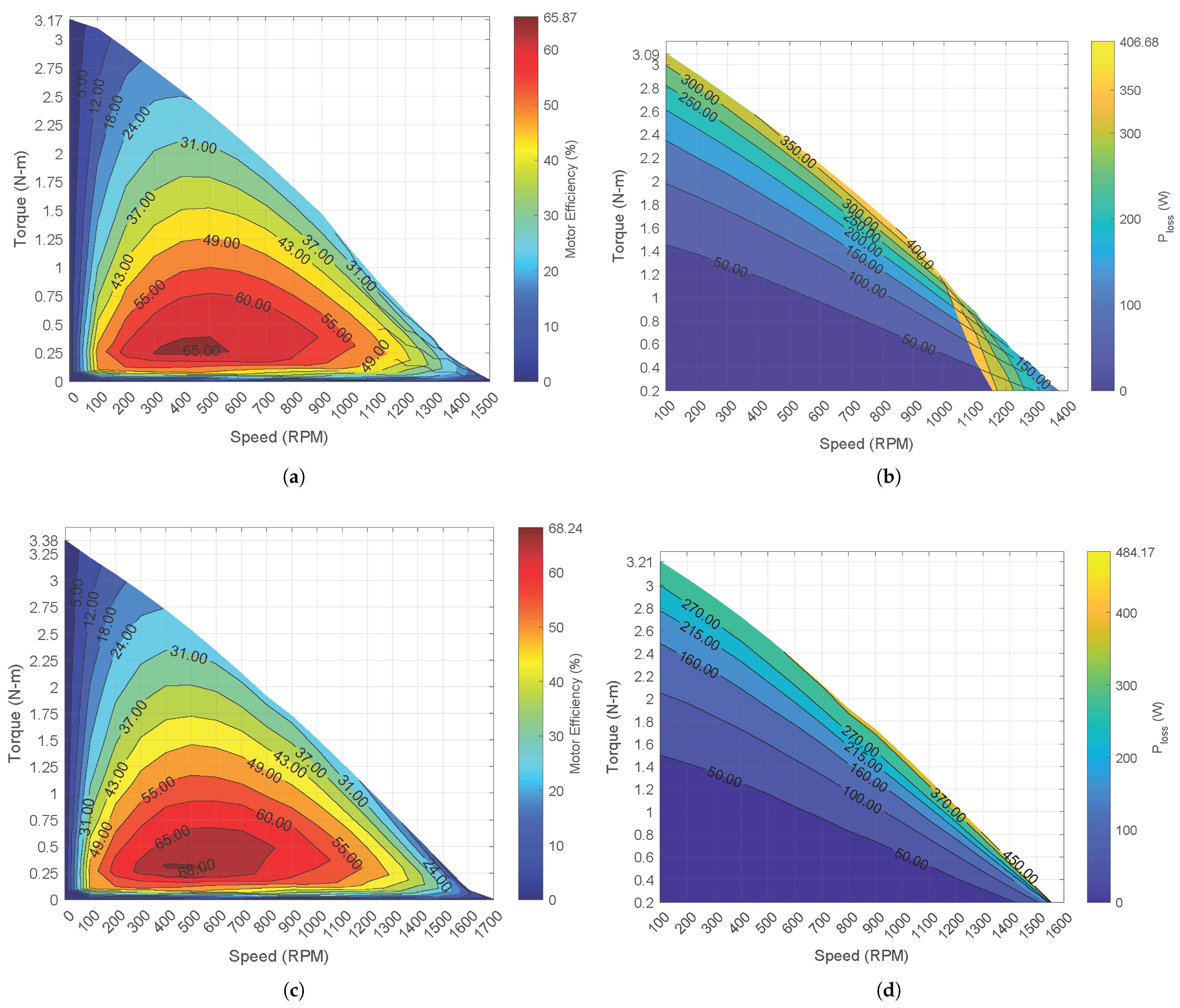
3.1. Motor Efficiency and Loss Maps
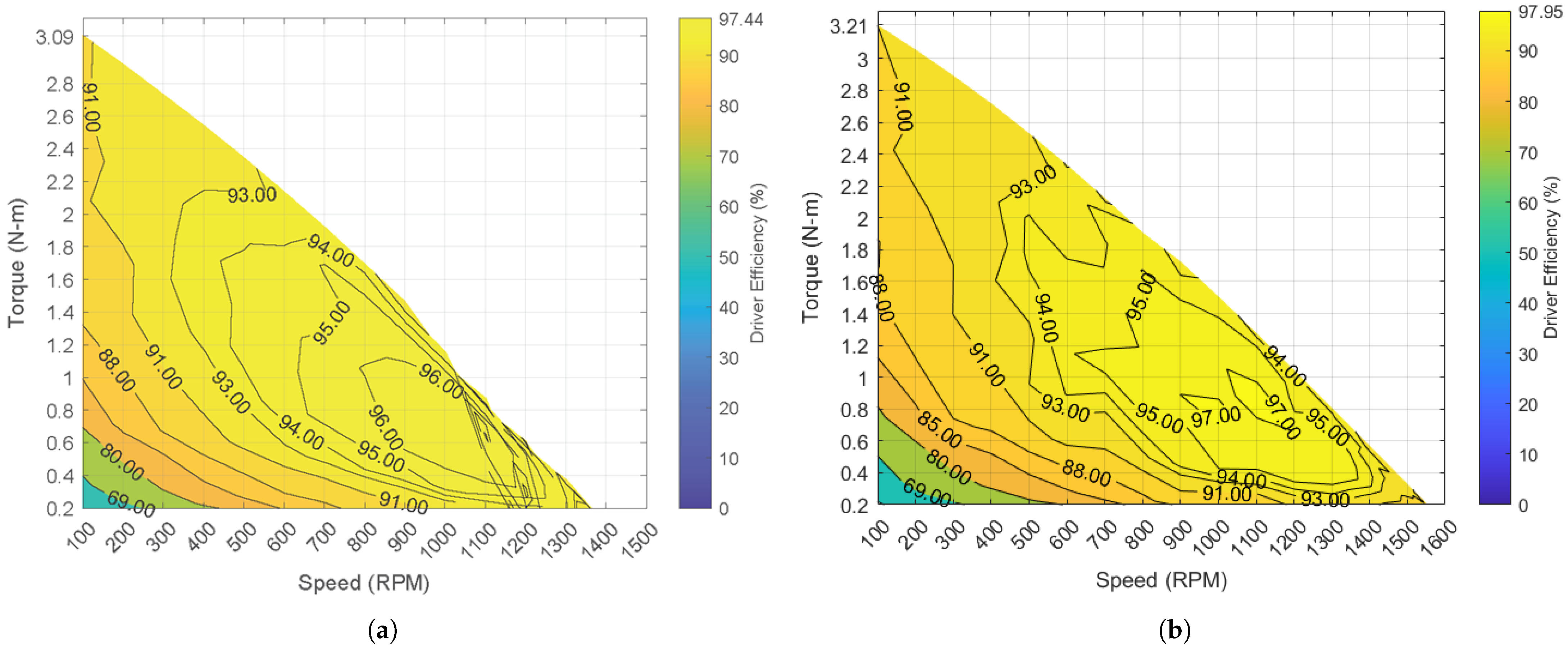
3.2. Motor Driver Efficiency Maps
3.3. Motor Thermal Responses
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of Open Access Journals |
References
- Multirotor Drone Market—Report Overview. Available online: https://www.alliedmarketresearch.com/multirotor-drone-market-A09185 (accessed on 18 April 2023).
- Kenneally, G.; De, A.; Koditschek, D.E. Design principles for a family of direct-drive legged robots. IEEE Robot. Autom. Lett. 2016, 1, 900–907. [Google Scholar] [CrossRef] [Green Version]
- Reichert, T.; Nussbaumer, T.; Kolar, J.W. Torque scaling laws for interior and exterior rotor permanent magnet machines. IEEE Int. Magn. Conf. 2009, 3, 4–7. [Google Scholar]
- Lee, J.J.; Kim, W.H.; Yu, J.S.; Yun, S.Y.; Kim, S.M.; Lee, J.J.; Lee, J. Comparison between concentrated and distributed winding in IPMSM for traction application. In Proceedings of the IEEE International Conference on Electrical Machines and Systems, Incheon, Republic of Korea, 10–13 October 2010; pp. 1172–1174. [Google Scholar]
- Brill, A.L.; De, A.; Johnson, A.M.; Koditschek, D.E. Tail-assisted rigid and compliant legged leaping. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September 2015–2 October 2015; pp. 6304–6311. [Google Scholar]
- Katz, B.; Carlo, J.D.; Kim, S. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6295–6301. [Google Scholar]
- Kalouche, S. GOAT: A legged robot with 3D agility and virtual compliance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4110–4117. [Google Scholar]
- Carney, M.E.; Shu, T.; Stolyarov, R.; Duval, J.-F.; Herr, H.M. Design and Preliminary Results of a Reaction Force Series Elastic Actuator for Bionic Knee and Ankle Prostheses. IEEE Trans. Med. Robot. Bionics 2021, 3, 542–553. [Google Scholar] [CrossRef]
- Azocar, A.F.; Mooney, L.M.; Duval, J.F.; Simon, A.M.; Hargrove, L.J.; Rouse, E.J. Design and clinical implementation of an open-source bionic leg. Nat. Biomed. Eng. 2020, 4, 941–953. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Jiao, C.; Dominguez, I.; Yu, S.; Su, H. Design and Backdrivability Modeling of a Portable High Torque Robotic Knee Prosthesis With Intrinsic Compliance for Agile Activities. IEEE/ASME Trans. Mechatron. 2022, 27, 1837–1845. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Huang, T.-H.; Yang, X.; Jiao, C.; Yang, J.; Chen, Y.; Yi, J.; Su, H. Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton With High Backdrivability and High Bandwidth. IEEE/ASME Trans. Mechatron. 2020, 25, 1794–1802. [Google Scholar] [CrossRef] [PubMed]
- Nesler, C.; Thomas, G.; Divekar, N.; Rouse, E.J.; Gregg, R.D. Enhancing Voluntary Motion With Modular, Backdrivable, Powered Hip and Knee Orthoses. IEEE Robot. Autom. Lett. 2022, 7, 6155–6162. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.-H.; Zhang, S.; Yu, S.; MacLean, M.K.; Zhu, J.; Di Lallo, A.; Jiao, C.; Bulea, T.C.; Zheng, M.; Su, H. Modeling and Stiffness-Based Continuous Torque Control of Lightweight Quasi-Direct-Drive Knee Exoskeletons for Versatile Walking Assistance. IEEE Trans. Robot. 2022, 38, 1442–1459. [Google Scholar] [CrossRef] [PubMed]
- Lee, U.H.; Pan, C.-W.; Rouse, E.J. Empirical Characterization of a High-performance Exterior-rotor Type Brushless DC Motor and Drive. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 8018–8025. [Google Scholar]
- Katz, G.B. A Low Cost Modular Actuator for Dynamic Robots. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2018. [Google Scholar]
- Hsieh, T.H. Design and Control of a Two-Degree-of-Freedom Powered Ankle-Foot Prosthesis. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2019. [Google Scholar]
- Kang, I.; Peterson, R.R.; Herrin, K.R.; Mazumdar, A.; Young, A.J. Design and Validation of a Torque-Controllable Series Elastic Actuator-Based Hip Exoskeleton for Dynamic Locomotion. J. Mech. Robot. 2023, 15, 021007. [Google Scholar] [CrossRef]
- Fleckenstein, J.E. Three-Phase Electrical Power, 1st ed.; CRC Press: Boca Raton, FL, USA, 2016; pp. 182–184. [Google Scholar]
- Everest XCR Product Description. Available online: https://drives.novantamotion.com/eve-xcr/product-description (accessed on 8 February 2023).
- Drive Protections. Available online: https://drives.novantamotion.com/denxcr/drive-protections (accessed on 18 May 2023).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 200 RPM | 400 RPM | 600 RPM | 800 RPM | 1000 RPM | |
|---|---|---|---|---|---|
| 2 A | 5.11% | 9.68% | 15.5% | 25.11% | 67.98% |
| 4 A | 3.73% | 6.69% | 10.36% | 14.92% | 29.03% |
| 5 A | 4.34% | 6.79% | 10.79% | 16.34% | 29.81% |
| 10 A | 3.86% | 6.01% | 9.22% | 13.6% | 24.05% |
| 15 A | 3.79% | 6.06% | 9.06% | 12.91% | 23.08% |
| 20 A | 3.95% | 6.1% | 8.94% | 12.83% | 23.02% |
| 25 A | 4.15% | 6.33% | 9.00% | 12.86% | 22.81% |
| 30 A | 4.45% | 6.5% | 9.2% | 12.79% | 22.78% |
| 35 A | 4.59% | 6.68% | 9.32% | 12.76% | 22.79% |
| 40 A | 4.74% | 6.78% | 9.32% | 12.68% | 22.65% |
| 45 A | 4.79% | 6.83% | 9.28% | 12.71% | 22.44% |
| 50 A | 4.72% | 6.87% | 9.12% | 12.53% | 34.47% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsieh, T.-H.; Yeon, S.H.; Herr, H. Energy Efficiency and Performance Evaluation of an Exterior-Rotor Brushless DC Motor and Drive System across the Full Operating Range. Actuators 2023, 12, 318. https://doi.org/10.3390/act12080318
Hsieh T-H, Yeon SH, Herr H. Energy Efficiency and Performance Evaluation of an Exterior-Rotor Brushless DC Motor and Drive System across the Full Operating Range. Actuators. 2023; 12(8):318. https://doi.org/10.3390/act12080318
Chicago/Turabian StyleHsieh, Tsung-Han, Seong Ho Yeon, and Hugh Herr. 2023. "Energy Efficiency and Performance Evaluation of an Exterior-Rotor Brushless DC Motor and Drive System across the Full Operating Range" Actuators 12, no. 8: 318. https://doi.org/10.3390/act12080318
APA StyleHsieh, T. -H., Yeon, S. H., & Herr, H. (2023). Energy Efficiency and Performance Evaluation of an Exterior-Rotor Brushless DC Motor and Drive System across the Full Operating Range. Actuators, 12(8), 318. https://doi.org/10.3390/act12080318