
Dynamic Modeling and Passivity-Based Control of an RV-3SB Robot




Abstract
:1. Introduction
- The passivity-based control law is relatively simple in comparison with other strategies found in the literature.
- Considering that this control strategy is novel and has not been found in the literature, it offers a suitable approach to solving this kind of problem.
- Naturally, dynamical systems established in the Lagrangian and Hamiltonian mathematical representations possess energy considerations. Therefore, the passivity-based controller proposed in this paper offers an appropriate control strategy, taking into account the dynamics of the RV-3SB robot.
- As verified experimentally and theoretically, the passivity-based control strategy presented in this paper yields a better closed loop performance in comparison with other control strategies.
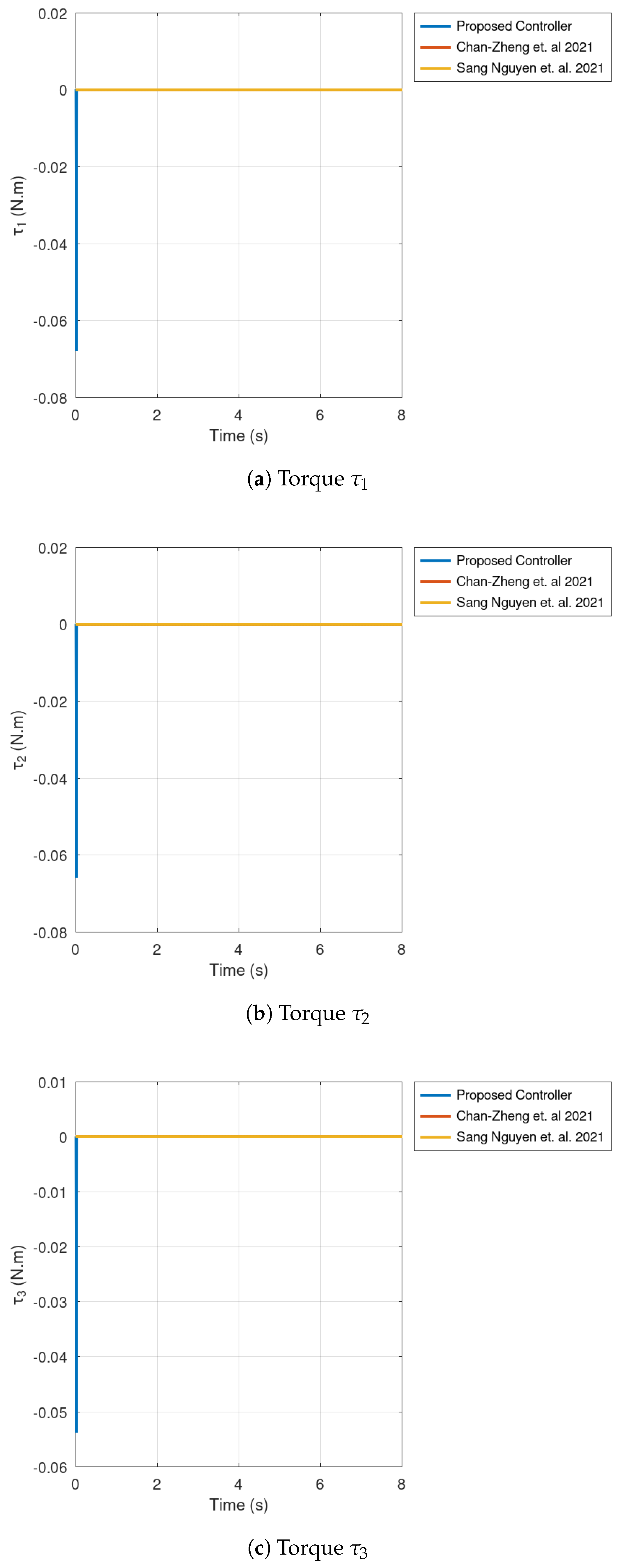
- The passivity-based controller evinced in this research study yields a better low computational effort considering the implementation in real-time hardware such as hardware in the loop.
- The parameters of this passivity-based controller are easy to tune with some evolutionary and/or optimization algorithm. This will be considered as a future direction of this research study.
2. Related Work
- Kinematics.
- Industrial robotics.
- Dissipative dynamic systems.
- Passivity-based control.
- Diverse control strategies for robotics.
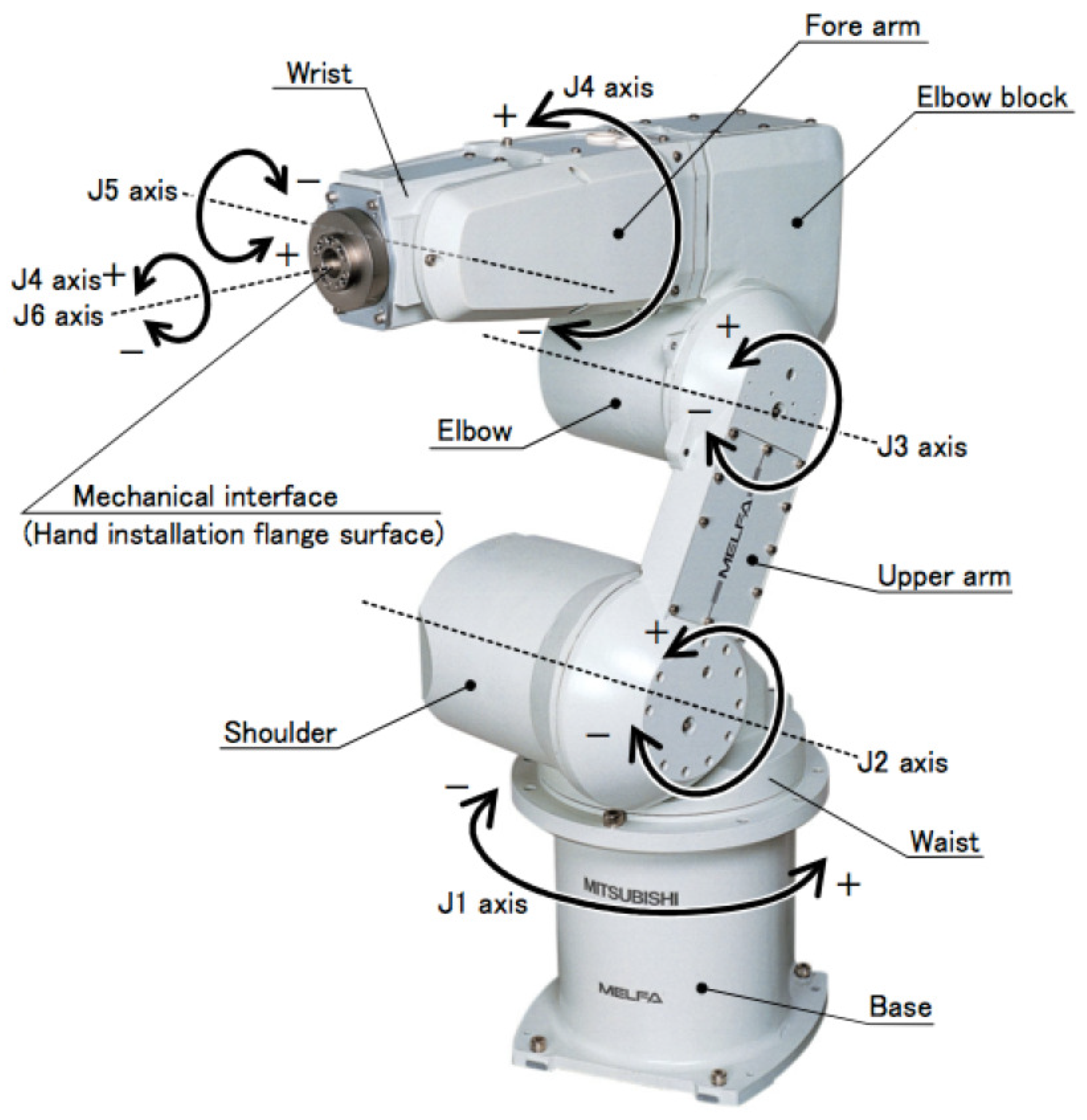
3. Dynamic Modeling of the RV-3SB Robot Manipulator and Controller Design
- Six Degrees of Freedom.
- Repeatability: ±0.02 mm.
- Maximum speed: 5500 mm/s.
- Range of Motion (degrees): J1 = 340, J2 = 225, J3 = 191, J4 = 320, J5 = 240, J6 = 720.
- Maximum speed in each joint (deg/seg): J1 = 250, J2 = 187, J3 = 250, J4 = 412, J5 = 412, J6 = 660.
- Weight: 37 kg.
Passivity-Based Control of the RV-3SB Robot Manipulator
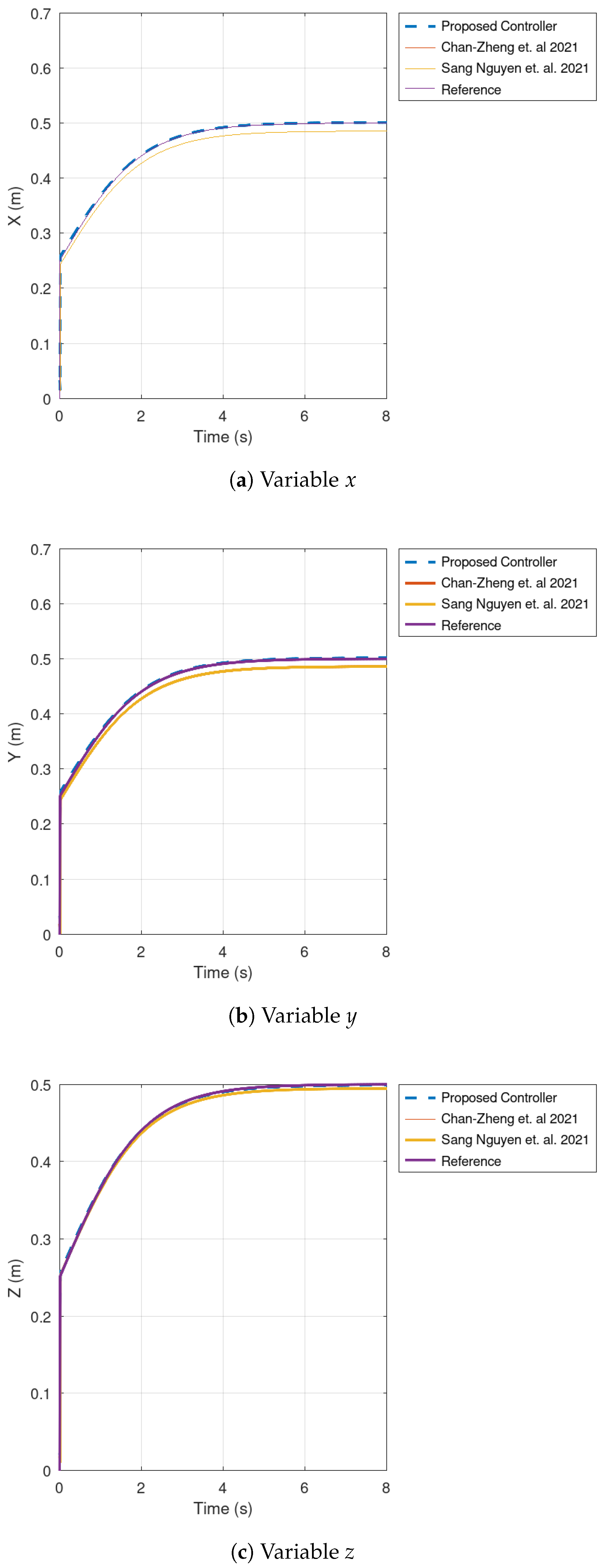
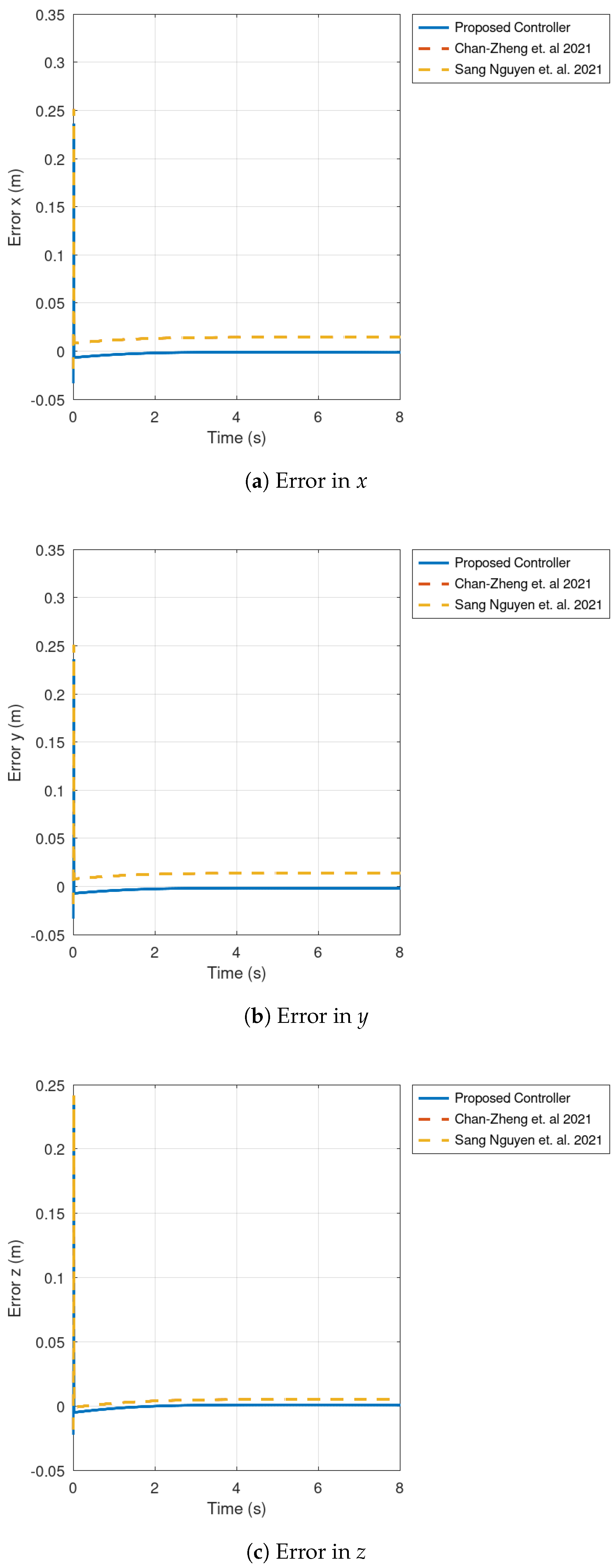
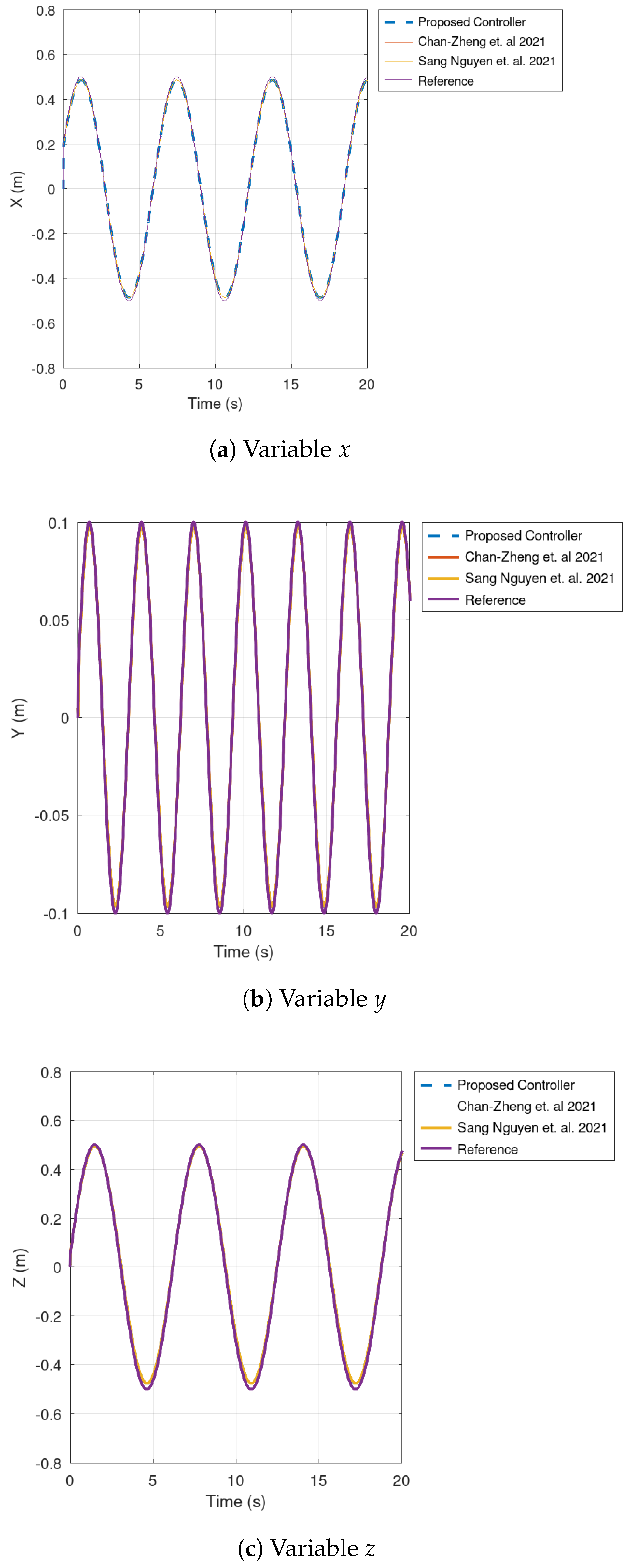
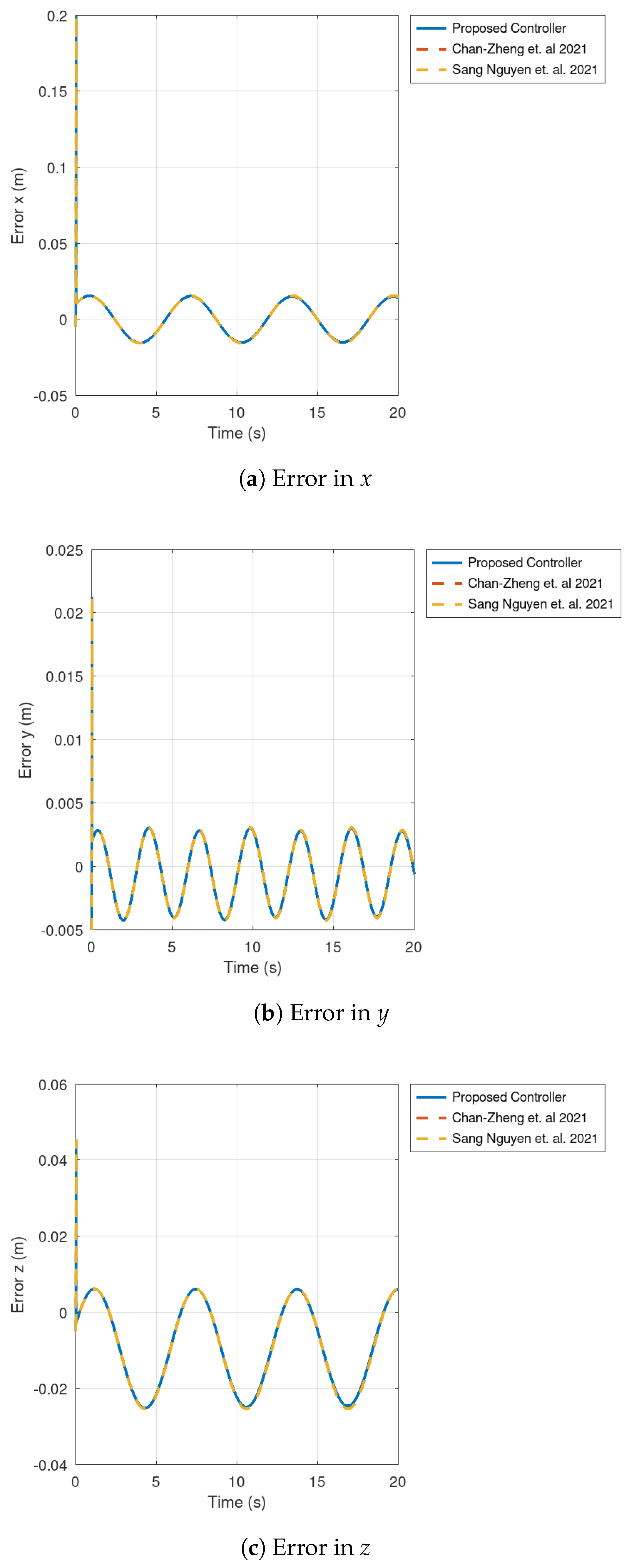
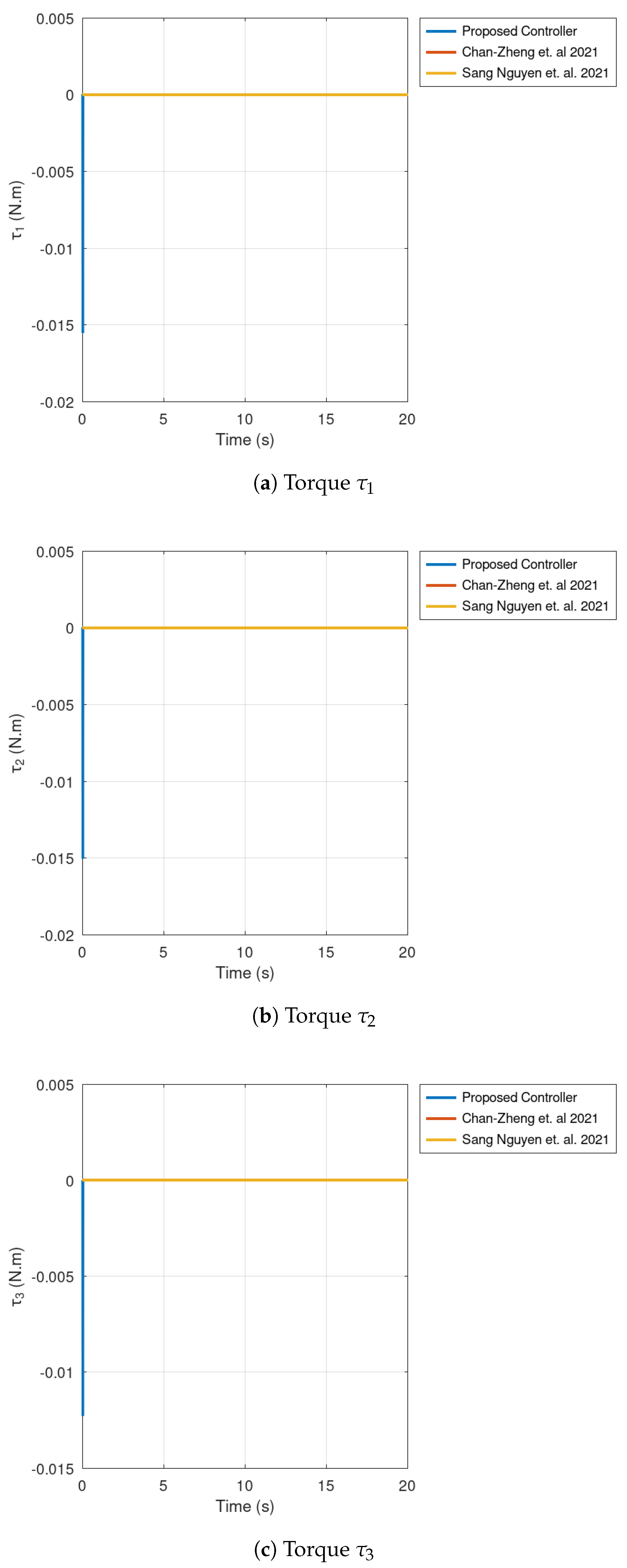
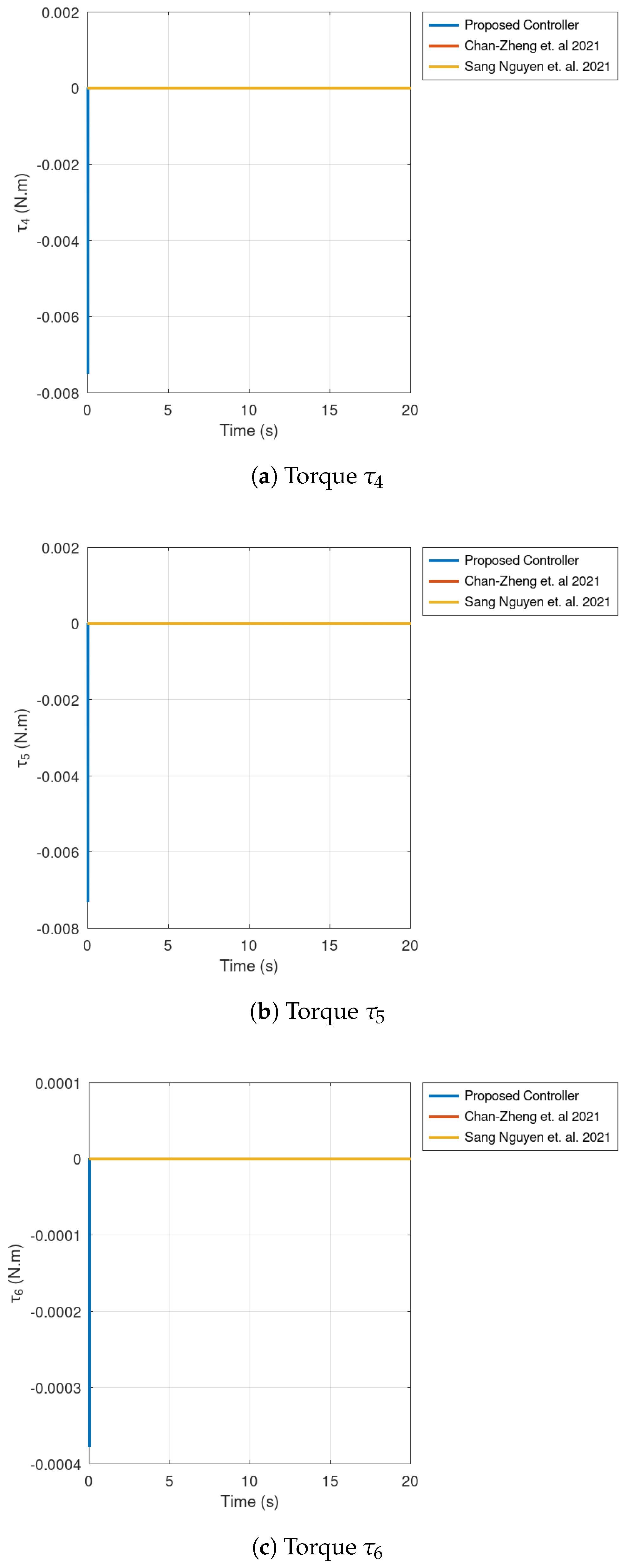
4. Numerical Experiment
- A sigmoidal reference profile.
- A sinusoidal reference profile.
4.1. Experiment 1
4.2. Experiment 2
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, F.; Ju, H.; Liu, X. Inverse kinematic formula for a new class of 6R robotic arms with simple constraints. Mech. Mach. Theory 2023, 179, 105118. [Google Scholar] [CrossRef]
- Xu, K.; Chen, H.; Mueller, A.; Ding, X. Kinematics of the center of mass for robotic mechanisms based on lie group theory. Mech. Mach. Theory 2022, 175, 104933. [Google Scholar] [CrossRef]
- Shrey, S.; Patil, S.; Pawar, N.; Lokhande, C.; Dandage, A.; Ghorpade, R.R. Forward kinematic analysis of 5-DOF LYNX6 robotic arm used in robot-assisted surgery. Mater. Today Proc. 2022, 72, 858–863. [Google Scholar] [CrossRef]
- Yang, B.; Yang, W. Modular approach to kinematic reliability analysis of industrial robots. Reliab. Eng. Syst. Saf. 2023, 229, 108841. [Google Scholar] [CrossRef]
- Cardona, M. A new approach for the forward kinematics of general stewart-gough platforms. In Proceedings of the 2015 IEEE Thirty Fifth Central American and Panama Convention (CONCAPAN XXXV), Tegucigalpa, Honduras, 11–13 November 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, X.; Sun, S.; Zhang, P.; Wu, M.; Zhao, C.; Zhang, D.; Meng, X. Model-based kinematic and non-kinematic calibration of a 7R 6-DOF robot with non-spherical wrist. Mech. Mach. Theory 2022, 178, 105086. [Google Scholar] [CrossRef]
- Yin, F.; Wang, L.; Tian, W.; Zhang, X. Kinematic calibration of a 5-DOF hybrid machining robot using an extended Kalman filter method. Precis. Eng. 2023, 79, 86–93. [Google Scholar] [CrossRef]
- Zhao, Y.; Fang, H.; Diao, B.; Zhang, X.; Xu, J. Exploiting the bistable dynamics in a two-module vibration-driven robot for locomotion performance enhancement. J. Sound Vib. 2023, 544, 117387. [Google Scholar] [CrossRef]
- Misyurin, S.; Nosova, N.; Nelyubin, A.; Zhao, J.; Martins, D. Hexabot Robot: Derivation of the dynamics equations. Procedia Comput. Sci. 2022, 213, 680–687. [Google Scholar] [CrossRef]
- Yu, P.; Tan, N.; Zhong, Z. Comparative studies and performance analysis on neural-dynamics-driven control of redundant robot manipulators with unknown models. Eng. Appl. Artif. Intell. 2023, 117, 105528. [Google Scholar] [CrossRef]
- Lages, W.F. Remote Teaching of Dynamics and Control of Robots Using ROS 2. IFAC-PapersOnLine 2022, 55, 279–284. [Google Scholar] [CrossRef]
- Ba, K.; Song, Y.; Yu, B.; He, X.; Huang, Z.; Li, C.; Yuan, L.; Kong, X. Dynamics compensation of impedance-based motion control for LHDS of legged robot. Robot. Auton. Syst. 2021, 139, 103704. [Google Scholar] [CrossRef]
- Zhao, L.; Li, J.; Li, H.; Liu, B. Double-loop tracking control for a wheeled mobile robot with unmodeled dynamics along right angle roads. ISA Trans. 2022, 136, 525–534. [Google Scholar] [CrossRef]
- Gallardo-Alvarado, J.; Gallardo-Razo, J. Chapter 18—Fundamentals of screw theory. In Mechanisms; Gallardo-Alvarado, J., Gallardo-Razo, J., Eds.; Emerging Methodologies and Applications in Modelling, Identification and Control; Academic Press: Cambridge, MA, USA, 2022; pp. 381–420. [Google Scholar]
- Cibicik, A.; Egeland, O. Dynamic modelling and force analysis of a knuckle boom crane using screw theory. Mech. Mach. Theory 2019, 133, 179–194. [Google Scholar] [CrossRef]
- Shi, C.; Guo, H.; Zhang, S.; Liu, R.; Deng, Z. Configuration synthesis of linear foldable over-constrained deployable unit based on screw theory. Mech. Mach. Theory 2021, 156, 104163. [Google Scholar] [CrossRef]
- Kang, X.; Feng, H.; Dai, J.S.; Yu, H. High-order based revelation of bifurcation of novel Schatz-inspired metamorphic mechanisms using screw theory. Mech. Mach. Theory 2020, 152, 103931. [Google Scholar] [CrossRef]
- Fan, S.; Shen, G.; Liu, T.; Lan, W.; Song, G. A universal modelling approach and a response index to the vibration analysis for space parallel robots by means of screw theory. Appl. Math. Model. 2023, 114, 1–22. [Google Scholar] [CrossRef]
- Cai, J.; Deng, X.; Feng, J.; Xu, Y. Mobility analysis of generalized angulated scissor-like elements with the reciprocal screw theory. Mech. Mach. Theory 2014, 82, 256–265. [Google Scholar] [CrossRef]
- Xu, M.; Wang, J. Learning strategy for continuous robot visual control: A multi-objective perspective. Knowl.-Based Syst. 2022, 252, 109448. [Google Scholar] [CrossRef]
- Korayem, M.; Vosoughi, R.; Vahidifar, V. Design, manufacture, and control of a laparoscopic robot via Leap Motion sensors. Measurement 2022, 205, 112186. [Google Scholar] [CrossRef]
- Wang, M.; Li, W.; Luo, J.; Walter, U. Coordinated hierarchical control of space robotic safe manipulation with load sharing. Acta Astronaut. 2023, 202, 360–372. [Google Scholar] [CrossRef]
- Mujica, M.; Crespo, M.; Benoussaad, M.; Junco, S.; Fourquet, J.Y. Robust variable admittance control for human–robot co-manipulation of objects with unknown load. Robot. Comput.-Integr. Manuf. 2023, 79, 102408. [Google Scholar] [CrossRef]
- Jafari, M.; Mobayen, S.; Bayat, F.; Roth, H. A nonsingular terminal sliding algorithm for swing and stance control of a prosthetic leg robot. Appl. Math. Model. 2023, 113, 13–29. [Google Scholar] [CrossRef]
- Bhandari, G.; Raj, R.; Pathak, P.M.; Yang, J.M. Robust control of a planar snake robot based on interval type-2 Takagi–Sugeno fuzzy control using genetic algorithm. Eng. Appl. Artif. Intell. 2022, 116, 105437. [Google Scholar] [CrossRef]
- de Jong, M.C.; Kosaraju, K.C.; Scherpen, J.M. On control of voltage-actuated piezoelectric beam: A Krasovskii passivity-based approach. Eur. J. Control 2022, 69, 100724. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, Q.; Hassan, M.A.; Zhang, Z.; Hou, M.; Wu, S.; Li, Y.; Li, E.; Guerrero, J.M. A robust passivity based model predictive control for buck converter suppling constant power load. Energy Rep. 2021, 7, 792–813. [Google Scholar] [CrossRef]
- Gandarilla, I.; Santibáñez, V.; Sandoval, J.; Romero, J.G. PID passivity-based control laws for joint position regulation of a self-balancing robot. Control Eng. Pract. 2021, 116, 104927. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, H.; He, X.; Feng, Y.; Pang, C.K. Passivity-based coupling control for underactuated three-dimensional overhead cranes. ISA Trans. 2022, 126, 352–360. [Google Scholar] [CrossRef] [PubMed]
- Shen, P.Y.; Schatz, J.; Caverly, R.J. Passivity-based adaptive trajectory control of an underactuated 3-DOF overhead crane. Control Eng. Pract. 2021, 112, 104834. [Google Scholar] [CrossRef]
- Shahna, M.H.; Abedi, M. Design of a finite time passivity based adaptive sliding mode control implementing on a spacecraft attitude dynamic simulator. Control Eng. Pract. 2021, 114, 104866. [Google Scholar] [CrossRef]
- Chan-Zheng, C.; Borja, P.; Scherpen, J.M. Passivity-based control of mechanical systems with linear damping identification. IFAC-PapersOnLine 2021, 54, 255–260. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Hoang, N.H.; Tan, C.K.; Bin Hussain, M.A. Proportional-Integral passivity-based control design of perturbed non-standard Hamiltonian systems. IFAC-PapersOnLine 2021, 54, 19–24. [Google Scholar] [CrossRef]
- Benamar, F.; Bidaud, P.; Le Menn, F. Generic differential kinematic modeling of articulated mobile robots. Mech. Mach. Theory 2010, 45, 997–1012. [Google Scholar] [CrossRef]
- Tsai, Y.; Soni, A. Workspace synthesis of 3R, 4R, 5R and 6R robots. Mech. Mach. Theory 1985, 20, 555–563. [Google Scholar] [CrossRef]
- Hon-Cheung, Y. Four co-reciprocal screws and their kinematic significance. Mech. Mach. Theory 1987, 22, 199–203. [Google Scholar] [CrossRef]
- Yukhimets, D.A.; Gubankov, A.S. Method of identification of kinematic and elastostatic parameters of multilink manipulators without external measuring devices. IFAC-PapersOnLine 2020, 53, 9879–9884. [Google Scholar] [CrossRef]
- Guglielmetti, P.; Longchamp, R. Task Space Control of the Delta Parallel Robot. IFAC Proc. Vol. 1992, 25, 337–342. [Google Scholar] [CrossRef]
- Guglielmetti, P.; Longchamp, R. A closed form inverse dynamics model of the delta parallel robot. IFAC Proc. Vol. 1994, 27, 51–56. [Google Scholar] [CrossRef]
- Shahidi, A.; Hüsing, M.; Corves, B. Kinematic Control of Serial Manipulators Using Clifford Algebra. IFAC-PapersOnLine 2020, 53, 9992–9999. [Google Scholar] [CrossRef]
- Liu, H.; Kecskeméthy, A.; Huang, T. An automatic approach for identification of natural reciprocal screw systems of serial kinematic chains based on the invariance properties matrix. Mech. Mach. Theory 2017, 107, 352–368. [Google Scholar] [CrossRef]
- Abaunza, H.; Chandra, R.; Özgür, E.; Ramón, J.A.C.; Mezouar, Y. Kinematic screws and dual quaternion based motion controllers. Control Eng. Pract. 2022, 128, 105325. [Google Scholar] [CrossRef]
- Zaplana, I.; Hadfield, H.; Lasenby, J. Closed-form solutions for the inverse kinematics of serial robots using conformal geometric algebra. Mech. Mach. Theory 2022, 173, 104835. [Google Scholar] [CrossRef]
- Kolathaya, S. Local stability of PD controlled bipedal walking robots. Automatica 2020, 114, 108841. [Google Scholar] [CrossRef]
- Nicosia, S.; Tomei, P. Model reference adaptive control algorithms for industrial robots. Automatica 1984, 20, 635–644. [Google Scholar] [CrossRef]
- Huang, J.; Wen, C.; Wang, W.; Jiang, Z.P. Adaptive output feedback tracking control of a nonholonomic mobile robot. Automatica 2014, 50, 821–831. [Google Scholar] [CrossRef]
- Xin, X.; Liu, Y. Reduced-order stable controllers for two-link underactuated planar robots. Automatica 2013, 49, 2176–2183. [Google Scholar] [CrossRef]
- Perrusquía, A.; Garrido, R.; Yu, W. Stable robot manipulator parameter identification: A closed-loop input error approach. Automatica 2022, 141, 110294. [Google Scholar] [CrossRef]
- Behera, P.; Dey, A.; Patra, S. Control of negative imaginary systems exploiting a dissipative characterization. Automatica 2022, 146, 110634. [Google Scholar] [CrossRef]
- Faulwasser, T.; Kellett, C.M. On continuous-time infinite horizon optimal control—Dissipativity, stability, and transversality. Automatica 2021, 134, 109907. [Google Scholar] [CrossRef]
- Xue, M.; Yan, H.; Zhang, H.; Wang, M.; Zhang, D. Dissipative output feedback tracking control of Markov jump systems under compensation scheme. Automatica 2022, 146, 110535. [Google Scholar] [CrossRef]
- Faulwasser, T.; Kellett, C.M. Dissipativity in Infinite-Horizon Optimal Control: Willems’ 1971 Paper Revisited. IFAC-PapersOnLine 2022, 55, 49–54. [Google Scholar] [CrossRef]
- Adhira, B.; Nagamani, G.; Dafik, D. Non-fragile extended dissipative synchronization control of delayed uncertain discrete-time neural networks. Commun. Nonlinear Sci. Numer. Simul. 2023, 116, 106820. [Google Scholar] [CrossRef]
- Neves, L.C.; Paim, G.V.; Queinnec, I.; Moreno, U.F.; De Pieri, E.R. Passivity and Power Based Control of a Robot with Parallel Architecture. IFAC Proc. Vol. 2011, 44, 14608–14613. [Google Scholar] [CrossRef]
- Leite, A.C.; Cruz, F.L.; Lizarralde, F. Adaptive Passivity-based Hybrid Pose/Force Control for Uncertain Robots. IFAC-PapersOnLine 2020, 53, 3854–3860. [Google Scholar] [CrossRef]
- Sakai, S.; Stramigioli, S. Passivity based force control of hydraulic robots. IFAC Proc. Vol. 2009, 42, 20–25. [Google Scholar] [CrossRef]
- Nguyen, T.; Hatanaka, T.; Doi, M.; Garone, E.; Fujita, M. A Passivity-Based Distributed Reference Governor for Constrained Robotic Networks. IFAC-PapersOnLine 2017, 50, 15434–15439. [Google Scholar] [CrossRef]
- Spong, M.W. Some new results in passivity based control of robots. In Proceedings of the 6th IFAC Symposium on Nonlinear Control Systems 2004 (NOLCOS 2004), Stuttgart, Germany, 1–3 September 2004; Volume 37, pp. 33–40. [Google Scholar]
- Hu, J.; Lennox, B.; Arvin, F. Robust formation control for networked robotic systems using Negative Imaginary dynamics. Automatica 2022, 140, 110235. [Google Scholar] [CrossRef]
- Sanchez, M.; Cruz-Ortiz, D.; Ballesteros, M.; Salgado, I.; Chairez, I. Output feedback robust control for teleoperated manipulator robots with different workspace. Expert Syst. Appl. 2022, 206, 117838. [Google Scholar] [CrossRef]
- Niu, S.; Chen, W.H.; Lu, X. Sliding mode control with integral sliding surface for linear uncertain impulsive systems with time delays. Appl. Math. Model. 2023, 113, 439–455. [Google Scholar] [CrossRef]
- Sami, I.; Ro, J.S. Adaptive supertwisting sliding mode control of multi-converter MVDC power systems. Energy Rep. 2022, 8, 467–479. [Google Scholar] [CrossRef]
- Pal, P.; Jin, G.G.; Bhakta, S.; Mukherjee, V. Adaptive chaos synchronization of an attitude control of satellite: A backstepping based sliding mode approach. Heliyon 2022, 8, e11730. [Google Scholar] [CrossRef] [PubMed]
- Cardona, M.; Garzón-Castro, C.L.; Gutiérrez, S. Kinematics Solution of the RV-3SB Robot Using Successive Screws. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Approach | Advantage | Disadvantage |
|---|---|---|
| Chan Zheng et al., 2021 [32] | This control approach provides an identification of linear damping. | Disturbances and especially unmodeled dynamics are not considered. |
| Nguyen et al., 2021 [33] | Proportional integral control PID along with passivity-based controller provides a robust control approach. | Parameter tuning is not considered in this research study. |
| Gandarilla et al., 2021 [28] | PID controller along with passivity-based controller is more precise and robust considering the well-known performance of PID controller and the energy consideration of a passivity-based controller. | The PID controller part must be tuned carefully in order to obtain an optimal performance in comparison with a standalone passivity-based controller. |
| Shen et al., 2021 [30] | The passivity-based adaptive controller for the 3-DOF overhead crane provides a better performance in comparison with a non-adaptive controller. | The adaptive passivity-based control law increase the computational effort. |
| Joint i | Screw Axis () | Screw Axis Location () |
|---|---|---|
| Parameter | Parameter Value |
|---|---|
| Controller Approach | ISE x | ISE y | ISE z |
|---|---|---|---|
| Proposed Controller | |||
| Chan Zheng et al., 2021 [32] | |||
| Nguyen et al., 2021 [33] |
| Controller Approach | Correlation | Correlation | Correlation |
|---|---|---|---|
| Proposed Controller | 0.9999 | 0.9965 | 0.9965 |
| Chan Zheng et al., 2021 [32] | 0.9998 | 0.9211 | 0.9229 |
| Nguyen et al., 2021 [33] | 0.9999 | 0.9964 | 0.9963 |
| Controller Approach | ISE x | ISE y | ISE z |
|---|---|---|---|
| Proposed Controller | |||
| Chan Zheng et al., 2021 [32] | |||
| Nguyen et al., 2021 [33] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardona, M.; Serrano, F.E.; García Cena, C.E. Dynamic Modeling and Passivity-Based Control of an RV-3SB Robot. Actuators 2023, 12, 339. https://doi.org/10.3390/act12090339
Cardona M, Serrano FE, García Cena CE. Dynamic Modeling and Passivity-Based Control of an RV-3SB Robot. Actuators. 2023; 12(9):339. https://doi.org/10.3390/act12090339
Chicago/Turabian StyleCardona, Manuel, Fernando E. Serrano, and Cecilia E. García Cena. 2023. "Dynamic Modeling and Passivity-Based Control of an RV-3SB Robot" Actuators 12, no. 9: 339. https://doi.org/10.3390/act12090339
APA StyleCardona, M., Serrano, F. E., & García Cena, C. E. (2023). Dynamic Modeling and Passivity-Based Control of an RV-3SB Robot. Actuators, 12(9), 339. https://doi.org/10.3390/act12090339