1. Introduction
A modular self-configurable robot (MSR) system, which is often referred to as a swarm robot system, promises to be cost-effective, robust, and durable in comparison with a collection of conventional and monolithic robots. MSR systems have shown their potentials to outperform traditional systems in terms of system adaptability for dynamic changes; traditional systems are limited to rigid configurations that cannot meet dramatic changes in tasks [
1]. The idea of MSRs was inspired by the resilient behavior of a biology system. Resilience means that a system is self-configurable, self-repairable, or self-recoverable to resume its functions when the system or its application environment is changed. In contrast, a human may feel tired, bored, or fatigued and recovering to normal conditions is difficult up to a certain extent [
2]. Several studies, such as hexagonal distributed modular robot (Hex-DMR) systems [
3,
4], have been developed to achieve the resilience of robotic systems.
Despite its importance, there is no universally accepted definition of reconfigurability in robotics. In this paper, reconfigurability refers to system capabilities in reconfiguring geometric structures, assemblies, and software connections and interactions [
1]. This paper focuses on system reconfigurability from the perspective of mechanical structures: reconfigurability is defined as the system’s ability to select and assemble functional modules into different configurations for task changes, and a functional module is defined as a smart object with specified functions and standardized interfaces to other modules [
1]. Functional modules are basic elements of a reconfigurable robotic system [
5].
The primary goal of this literature review is to (1) discuss the need of system reconfigurability in various robotic applications, (2) examine existing methods in achieving system reconfigurability, and (3) identify the limitations of existing methods in advancing self-configurable robotic systems. The findings from this literature review will provide the rationales for us to design a new reconfigurable robot system with a hybrid architecture for the enhanced reconfigurability of the system.
The rest of the paper is organized as follows. The research methodology of this survey is presented in
Section 2. In
Section 3, the applications of self-reconfigurable robotic systems are surveyed and classified in terms of their overall sizes. In
Section 4, the importance of system reconfigurability is discussed. In
Section 5, the trends of research and development in the field of self-reconfigurable robotics are analyzed. In
Section 6, existing methods for the design of self-reconfigurable robots are surveyed. Current solutions for mechanical design and control strategies are discussed in
Section 7 and
Section 8, respectively. In
Section 9, the challenges and future research opportunities are identified. The main findings from the literature review are summarized in
Section 10.
2. Research Methodology
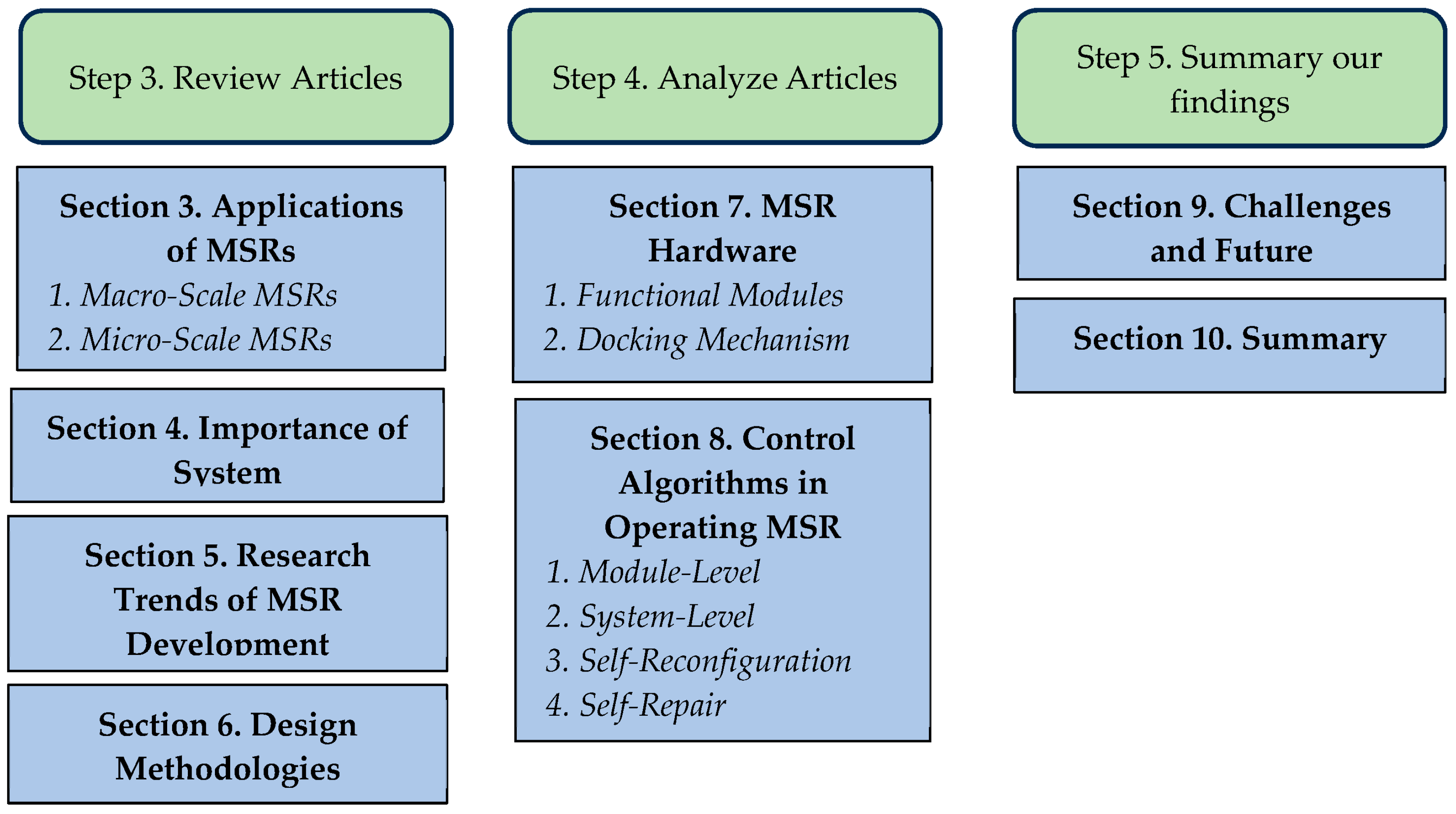
The framework of the paper shown in
Figure 1. is organized based on the following steps.
Search for relevant papers in online databases ScienceDirect, IEEE Xplore, and Google Scholar matching the keywords. Then, apply filters to select the most suitable papers for this research based on our scope, content, and definitions.
Classify the papers based on their type: review articles and research articles.
Discuss several aspects of MSR systems mentioned in the review articles, starting with introducing the applications of MSRs in different industries and then discussing the importance for such systems that motivates this research. The research trend in the field is also investigated to demonstrate the rising interest in MSRs and give an overview of the most recent developments. Finally, a general guideline to design MSR systems is reviewed.
Classify the research articles based one of the two most important design aspects of any robotic system: hardware and control software. This step helps to identify the strengths and limitations of current designs, which will be used as a basis for the functional requirements of our new MSR system.
Summarize the findings, discuss the current challenges and limitations of the study, and present directions for future research.
To have a comprehensive overview of the recent advancements in MSR development, the online ScienceDirect database is used to search for review and survey articles published from 2017 to 2022 with the keywords “reconfigurable robot, smart manufacturing”. Out of 347 papers found, 40 papers directly mentioning the keywords are selected. Then, to study the design of recently developed MSRs in terms of hardware, system architecture, and control strategies, the search phrase “reconfigurable robot, modular robot, docking mechanism” is used to search for research papers on ScienceDirect, IEEE Xplore, and Google Scholar, which yields a total of around 2100 papers. As the first search filter, any paper containing any combination of the keywords “reconfigurable, self-reconfigurable, modular, robot, docking mechanism” in its title is considered relevant to our scope of work. In the second screening phase, any paper that has less than 3 pages and 5 references is considered low quality and not selected for review. Finally, only 62 articles that match our definition of reconfigurability are discussed in this survey. When analyzing the selected papers, there is some missing information about the developed MSRs, such as module mass, load capacity, etc. As a result, the research team also has to look into some studies published before 2017 to find the missing information.
3. Applications of MSRs
Robotic applications have been widely explored in almost all human activities. In the literature, robotic applications are mostly classified according to the purposes of application, including industrial robots, personal assistive robots, medical robots, service robots, space robots, and rescue robots [
6]. However, since our interest is in how to improve the reconfigurability of an MSR, existing robots are classified into two categories, i.e., macro-scale MSRs, where conventional machine elements are mostly used in building robotic modules and configurations where the rigid connectors are applied to connect modules, and micro-scale MSRs where machine elements are specifically designed and fabricated in building robotic modules and configurations, where weak connectors such as by magnetic forces are used to connect modules from multiple directions. In both cases, reconfigurability is achieved in mainly by two approaches, i.e., (1) selecting different types or numbers of modules, and (2) assembling selected modules in different structures.
3.1. Macro-Scale MSRs
The concepts of adaptability and reconfigurability systems were initially introduced for the design and manufacturing of products, and advancing enabling technologies for the high-level adaptability and reconfigurability of manufacturing systems is still a prioritized strategy in both developed and developing nations and regions. Due to increasing demands for personalized products, shortened product lifecycles, and highly turbulent business environments, manufacturing systems are continuously evolving and reconfiguring to produce new products over time cost-effectively. The needs for system evolution in its lifecycle require the system capabilities of adding, removing, substituting, and upgrading components and reconfiguring system elements at different domains, levels, and scopes [
7]. Conventional manufacturing systems, such as mass production and computer-integrated manufacturing (CIM), have exposed their limitations in responding to unanticipated changes promptly [
8,
9]. Therefore, many concepts have been proposed to describe the functional requirements (FRs) of manufacturing systems in dealing with changes and uncertainties, and two examples are smart manufacturing (SM) and self-organizing manufacturing network (SOMN). SM aims to optimize a manufacturing system by allocating a workforce to interconnected machines and tools autonomously using artificial intelligence (AI) and advanced robotic technologies [
10,
11]. Note that the evaluation criteria of a conventional manufacturing system are time, lead-time, cost, and quality, rather than adaptability and reconfigurability; moreover, SM takes into account resources and energy consumption in optimizing system efficiency [
12]. SOMN is defined as a network of autonomous manufacturing entities such as machine tools, software tools, and human operators that could be connected in situation-dependent ways. A smart entity is able to change its internal geometric shape, structure, organization, or functions with minimum external intervention to adapt to changes in a dynamic environment [
13]. Other than the demands for personalized products, the circular economy relies on the extension of manufacturing businesses along the product lifecycle that emphasizes re-manufacturing. To improve system adaptability and reconfigurability, new enabling technologies are needed to improve the efficiency of resource utilization, minimize waste, and develop green products and sustainable manufacturing processes. Sustainability is closely related to remanufacturing, where used materials, parts, and components are remanufactured and utilized in new products with as-new or equivalent performance [
14].
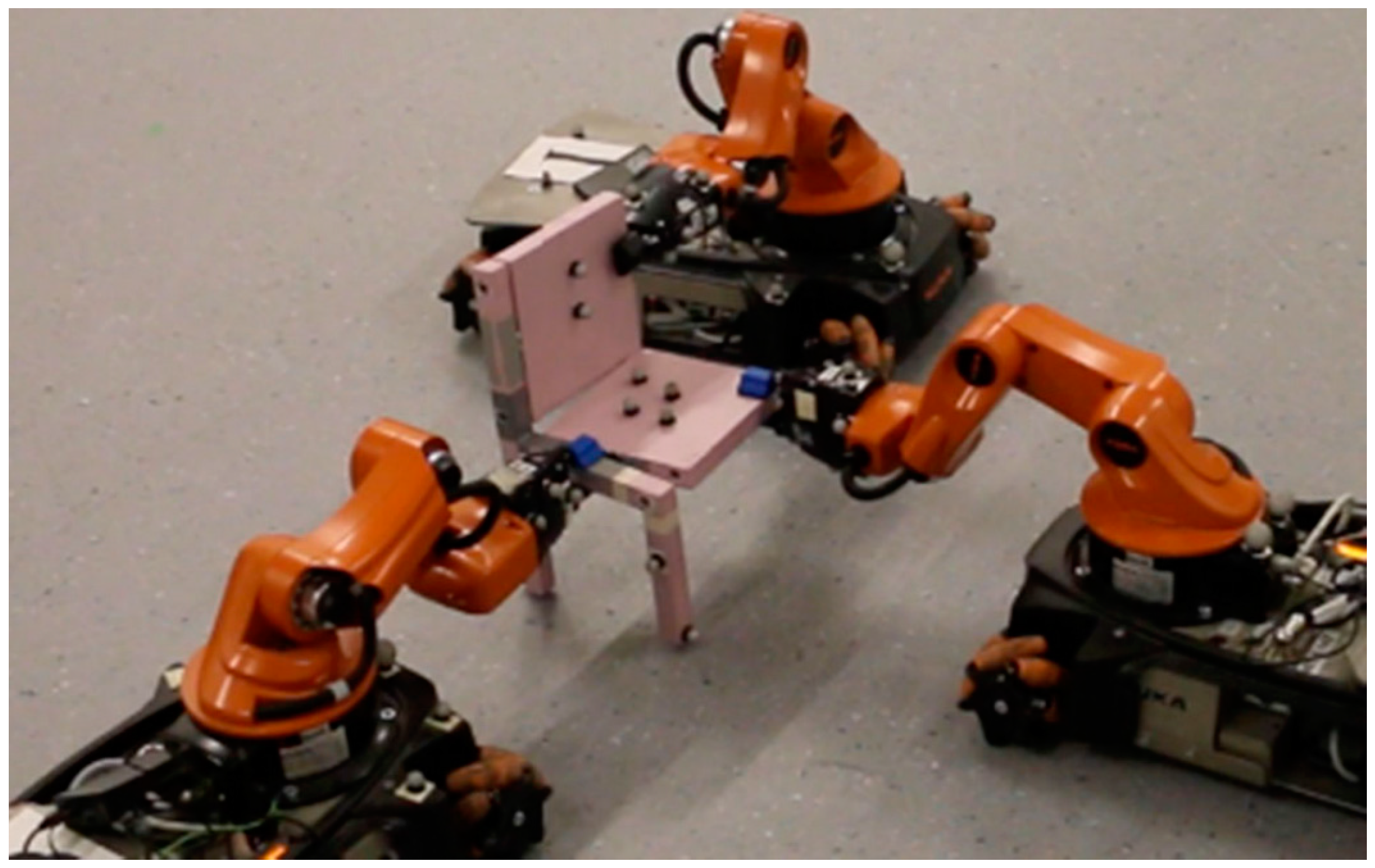
Numerous MSRs have been developed to achieve system reconfigurability and adaptability in industry settings. Since the start of Industry 4.0, technological and computational advancements have resulted in significant progress in the creation of technical worker assistance systems to assist workers in their daily tasks, such as collaborative robots, robot swarms, and robot assistance systems with ToF cameras [
15]. For example, an MSR system with a set of homogeneous robots is shown in
Figure 2. It is configured to grasp and assemble parts and components into a desired structure, such as a chair in the illustration [
11].
MSR systems are developed to complete labor-intensive, subjective, and dangerous tasks without human intervention, such as cleaning, maintenance, search and rescue, minimally invasive surgery, and infrastructure inspection [
16,
17,
18]. Reconfigurable robots have exhibited higher area coverage [
19] and this is attributed to their properties of being modular, reconfigurable on-site, multifunctional, incrementally assemblable, reusable, fault-tolerant, and even repairable in comparison to traditional robots [
20].
Applications of MSRs have been explored in outer space missions. Autonomous robots play a critical role since they function continuously and cost-effectively in a hostile and little-understood outer space environment, where cosmic radiation and space debris can cause harm to astronauts. Keeping a human operator in orbit for long periods of time or at great distances from the Earth’s surface, on the other hand, is logistically, monetarily, and morally unviable. As a result, durable and intelligent autonomous robotic systems capable of making local judgments in real time are extremely beneficial to space missions, particularly those involving managing objects in the Earth’s or other planets’ orbits [
21]. Modular and reconfigurable robots are also employed in constructing and operating large-scale systems such as spacecraft, satellites [
22], giant telescopes, and space solar panels [
23,
24].
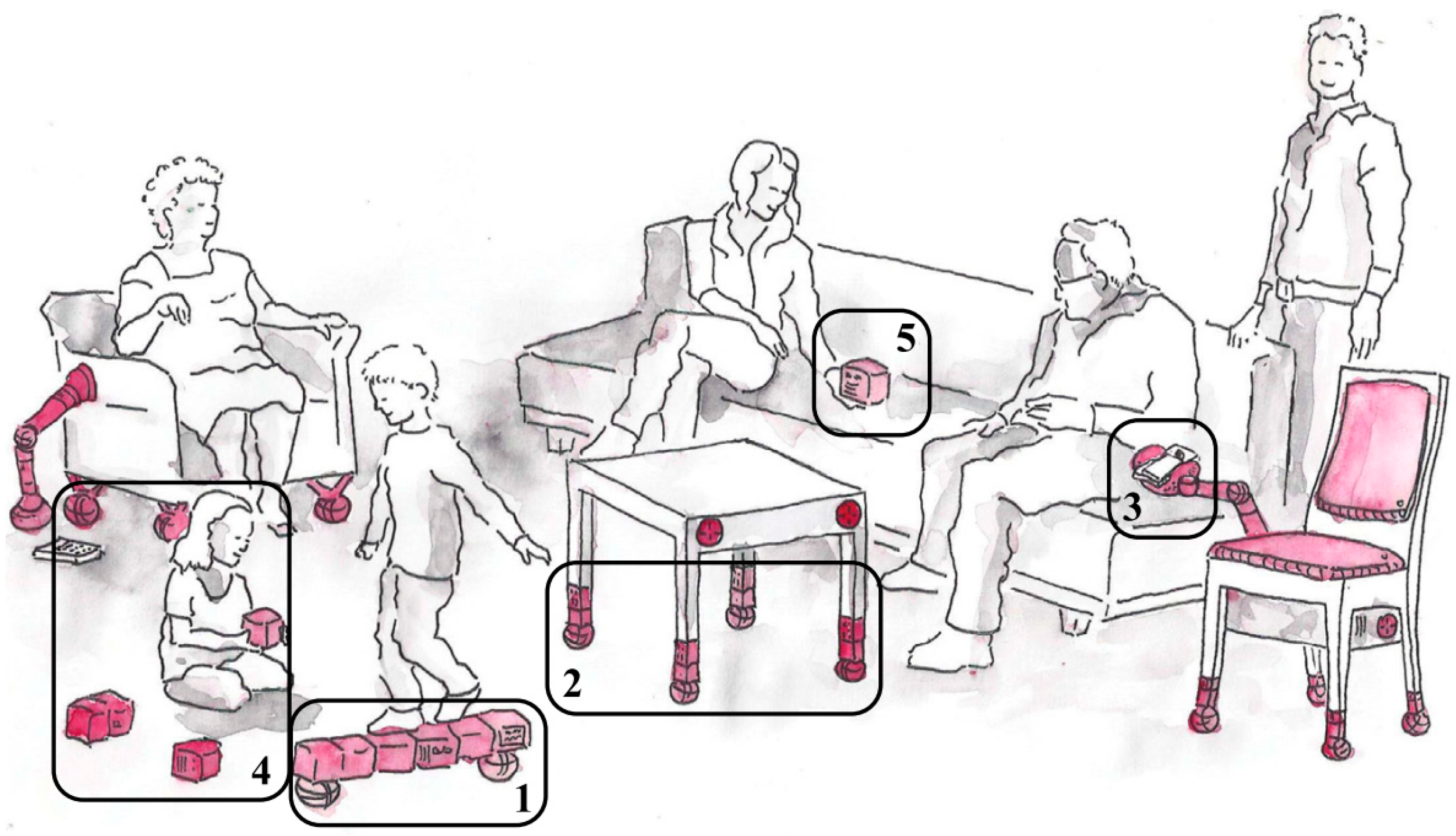
More and more MSRs are used to assist people’s daily activities in society. For example,
Figure 3 shows the application scenario of Roombots (RB), which provide various routine services at home. The system is featured as (1) its self-configuration from a collection of RB functional modules; (2) its mobility via furniture with a movable RB module that is capable of moving freely in space; (3) its manipulability, by which simple tasks such as picking, holding, and transporting an object can be automated; (4) its reconfigurability, by which people can collaborate with robotically augmented furniture; (5) its user-friendly interface, which allows users to monitor the states of RB modules in environments interactively [
25].
MSR systems have been widely studied as assistive rehabilitation technologies in clinical practice in recent decades [
26]. Assistive robotic systems are able to change their mobility and/or kinematic behaviors by modifying the assemblies of constitutive modules to adopt environmental and task changes. Moreover, an MSR system does require some resilience so that a malfunctioned module can be easily replaced in a robotic configuration. Enhanced capabilities help robots to overcome some of the constraints of a conventional robot in the sense that an MSR system can adapt to frequent changes in tasks and environments. When an MSR is upgradable, the modules in a configuration can be removed, added, substituted, or reconfigured readily [
27].
3.2. Micro-Scale MSRs
In an MSR system, machine elements are specifically designed and fabricated in building robotic modules and configurations, and some machine elements affect system reconfigurations related to robotic controls. Earlier studies on the methodologies for system reconfiguration are limited to macro-scale modules and systems, while it tends to be more challenging as far as MSRs at micro-scale are concerned. In the long term, micro-scale MSRs aim to find, synthesize, and use the laws that allow artificial materials to mimic the functions of biological systems, especially the superior adaptability to changes and uncertainties in a dynamic environment. Different micro-scale MSRs can be distinguished from one to another in terms of the corresponding biomimetic and reconfigurable features. For example, the system in [
28] uses actuated modules, and these modules can be reorganized and configured with green energy collected from the surrounding environment; green energy is associated with the driving force formed by a power gradient of asymmetrical power conversion and transmission. The working principle of such an MSR is similar to a nano-level molecular motor or a live creature at the micro-level. Self-propelling particles have been developed for chemical and biological applications such as remotely driven drug delivery mechanisms, efficient catalysis, the reconfiguration of assemblies for microsurgical devices, and swarms of particles as self-healing materials in the next generation [
29].
4. Importance of System Reconfigurability
In recent years, the market has been rapidly transformed and globalized, and there are growing needs to develop reconfigurable manufacturing systems (RMSs), so that enterprises are able to deal with dynamics and changes cost-effectively. Accompanied by the fast evolution of the globalized market since 2010, the number of published papers on RMSs has increased by more than 60% [
8]. Manufacturers are developing
smart and
reconfigurable machines and tools that can satisfy the functional requirements of products and manufacturing processes throughout their lifespans dynamically and quickly. To increase production capabilities, a reconfigurable system should be capable of supporting the quick addition, removal, or alteration of process controls, functions, and/or activities using reconfigurable hardware and software. The global marketplace has raised the demands for highly diversified and customized products with small volumes, and this leads to the necessity of building competitiveness to quickly reconfigure a system to make new products with changeable quantities [
30]. RMSs have shown great potential to be adopted by more and more small and medium-sized enterprises (SMEs) over time. Taking an example from the data in [
10], over 73% of companies in the lodging and food services industries planned and invested in automation projects, and over 60% of companies in the manufacturing, transportation, and warehousing industries were involved in automation projects. Note that industrial robots were the primary manufacturing resources in automation production. To improve the flexibility and adaptability of a robot system, its system architecture should be modular in the sense that a variety of modularized functional modules can be selected and assembled into different configurations to fulfill a wide scope of tasks; moreover, general-purpose and standardized mechatronic components such as visions and end-effectors can easily be integrated to meet the specific needs of operations [
31]. Today’s business environments are becoming more and more turbulent and dynamic, which requires intelligent systems to be more adaptable to changes. For example, COVID-19 has brought numerous challenges for global supply chains to respond to emergent medical and healthcare needs; the exposed issues included rigid shipping and storage capabilities, labor shortages for immediate production expansion, and slow responses to new governmental regulations and rules [
30].
5. Research Trends of MSR Development
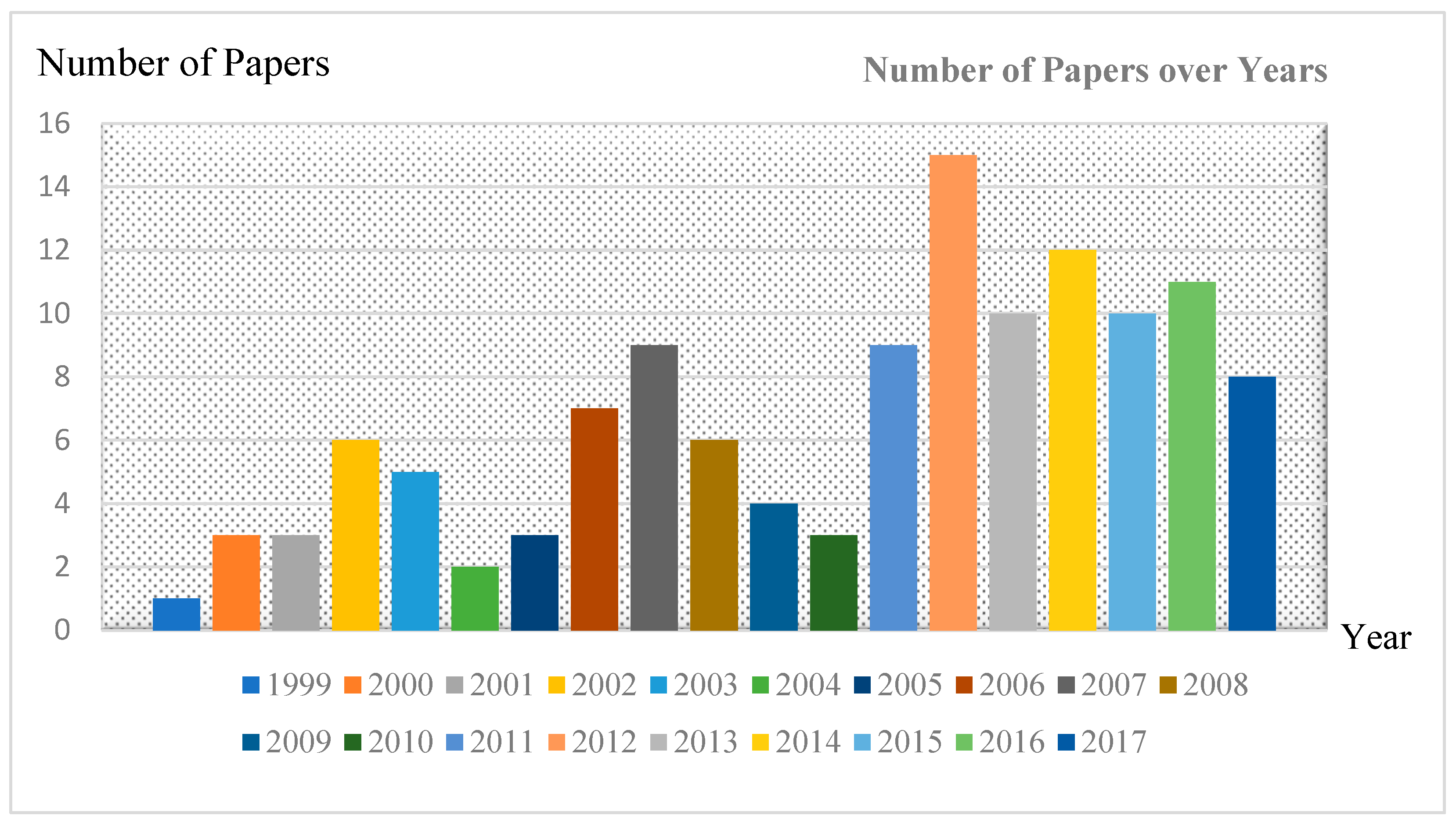
A number of researchers have discussed the trends in the research and development of MSRs. For example, Bortolini et al. [
8] identified 129 papers that were published from 1999 to 2017; these papers were highly relevant to the development of reconfigurable systems in manufacturing as well as transportation.
Figure 4 shows that the studies on reconfigurable systems have attracted a great deal of attention to the research community over the years. Readers might find it very helpful, as we have not found a recent survey to include the most significant works on MSRs from 2018 to 2023.
The survey by Xu et al. [
23] reported the published research of reconfigurable assembly systems in aerospace engineering. They found that, from 1990 to 2012, the number of published papers was steadily growing, with the rapid development of information technologies (ITs); in particular, the number of papers has been growing dramatically since 2013. This shows that in-space assembly (ISA) technologies demand high system reconfigurability for the dynamic interactions of large-scale space structures, production and processes, human–machine interactions, and unanticipated tasks in harsh space environments.
One primary research trend is the transition to developing new hardware architecture, controls, and methods to support self-reconfiguration, and a secondary trend is to develop new modular systems that are customized to specific applications, such as Roombots as assistive furniture; sTetro [
32], hTrihex [
33], and hTetran [
34] for floor cleaning; and Planet Numerous Search Robots (PNSRs) [
35] for searching and rescuing. A large number of MSRs have been prototyped, modeled, and simulated and they have demonstrated their reconfigurability in dealing with changes and uncertainties in applications. However, the majority of them are at their exploration stages and are not yet applied in real-world applications, and further research is needed to address the needs of self-reconfiguration, self-repairing, and resilience by considering all constraints of a system application, such as the power supply, connectivity, automated kinematic, dynamic, and control modeling, task-oriented configuration design, and decentralized controls and coordination [
36].
6. Design Methodologies
The design processes of MSR systems in the literature have common stages whose chronological order can be used to classify the design approaches, namely
bottom-up, and
top-down methods. In a
bottom-up method, the hardware modules are created first and self-reconfiguration algorithms are then developed for specified systems in applications. The majority of the MSRs discussed in
Section 7 use a bottom-up method; as an adverse consequence, robotic structures are less able to fulfill specified tasks since the hardware at the module level must be equipped with many functions, such as actuating, sensing, and controlling. The functions at a system level are fundamentally bounded by the functions of modules. In a
top-down method, versatile self-reconfiguration algorithms are developed at first—these algorithms are generic and applicable to a variety of MSRs; then, the hardware modules and platforms are developed that are compliant with the developed algorithms [
37].
Numerous MSR systems have been developed and each system has its unique features, as described in the literature. Liu et al. [
38] argued that the following properties should be considered in designing modules for an MSR system.
Modularization. A module as an individual should have some basic components that allow the module to be designed, tested, and operated independently; these basic components can be microprocessors, motors, power supplies, and sensors.
Actuation. A module should be actuated to support the reconfiguration of the system, manually, semi-automatically, or automatically.
Standardization. The design of a robotic module must be standardized as much as possible for the interchangeable use of modules or interconnectivity between modules, such as the communication protocol and docking interface.
Intelligence. It is desirable for a module to be intelligent as much as possible in sensing changes, detecting internal and external states, and interacting with other modules.
Serialization. To reduce the complexity of a reconfiguration process, different types of modules are needed.
With a focus on the design of mechanical structures, our focus is on how to meet the first three requirements effectively. Bi et al. [
39] have proposed a generic design methodology for reconfigurable robotic systems where a system should be reconfigured from time to time to adapt to changes and uncertainties. In this proposal, a set of
functional requirements (FRs) is determined at first, all of the possible design solutions (DSs) are collected as a design space, and heuristic algorithms are applied to evaluate and compare different DSs until the optimized DS is identified based on a set of performance metrics.
7. Modular Robotic Systems—Hardware
A modular system consists of exchangeable modules that have redundant functions in nature. Moreover, a shift from a centralized-redundant system to a decentralized-redundant system can simplify system design and reduce the unit cost of modules by mass production substantially [
1].
From the perspective of control, the intelligence of a functional module depends on its capabilities in acquiring data from the environment; therefore, it is critical to integrate sensors in a module, since an intelligent module should respond to external stimuli such as heat, light, electricity, humidity, and chemicals effectively. Accordingly, a functional module is usually embedded with
sensors,
actuators, and local controllers. Traditionally, the mechanical structure of a modern device can be either
rigid or
compliant; that implies that the mechanical properties of a mechanical structure are fixed and cannot be changed. Alternatively, stimuli-responsive materials with reconfigurable mechanical properties are introduced in adaptive robotics. For example, the smart materials used by Kim et al. [
40] were capable of supporting sensing and actuation in a robotic module. The main types of stimuli-responsive soft materials include
hydrogels,
bio-hybrid SMPs,
metal nanomaterials,
carbon nanomaterials,
liquid crystal polymers and
elastomers, and
azobenzenes; these materials can be used to reconfigure a mechanical system subjected to the influence of stimuli and mechanically transformative electronics [
41].
7.1. Functional Modules
The design of an MSR involves (1)
architecture design to determine a set of functional modules and feasible assemblies among modules; (2)
task-oriented design to optimize the selection and assembly of modules for a task-oriented system configuration; and (3)
system controls to integrate and coordinate module-level controllers for the fulfillment of system-level tasks. In this section,
the design of the modules and assembly patterns of an MSR system is discussed, respectively, and the methods for task-oriented designs and system controls are discussed in
Section 8.
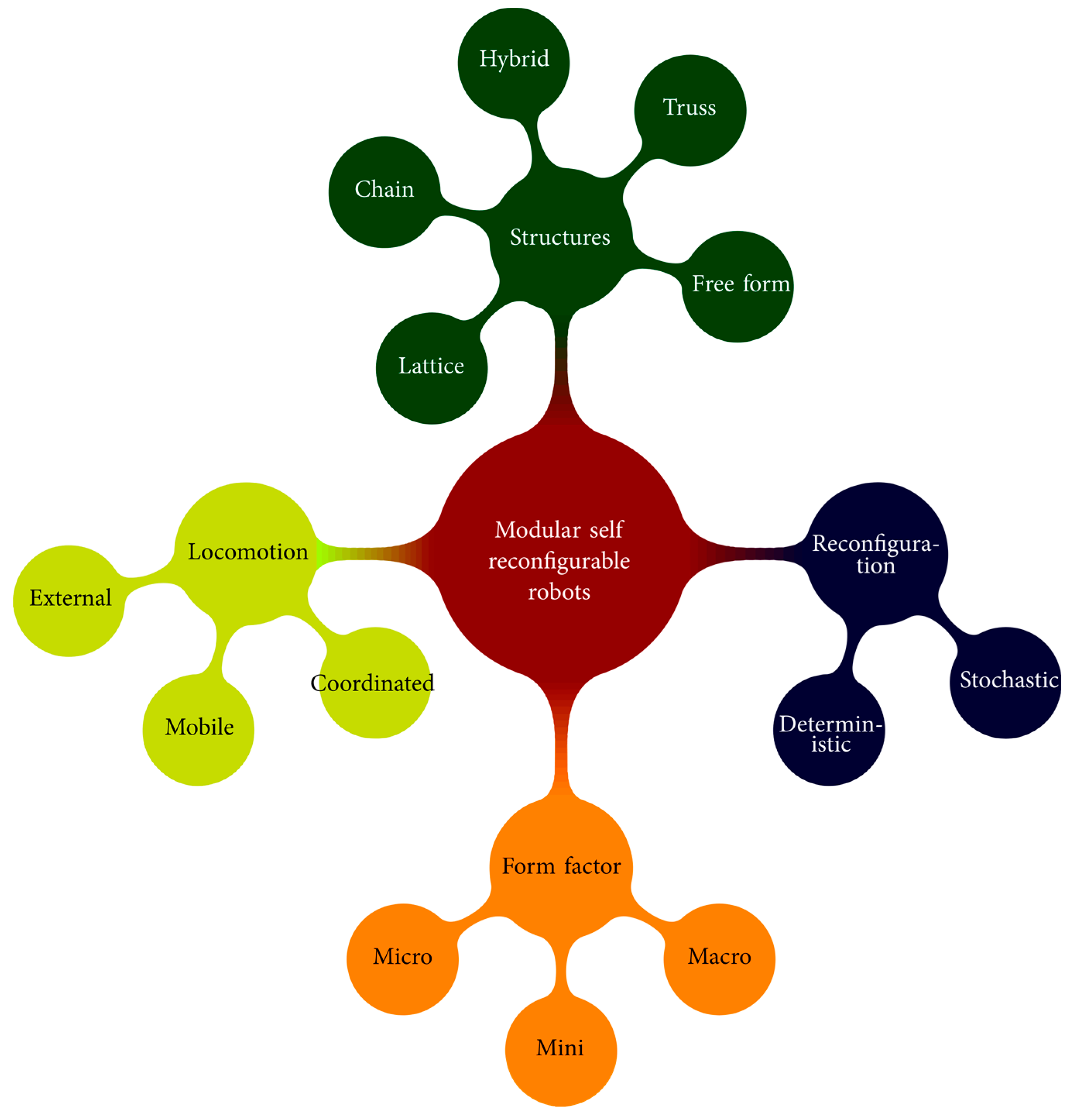
Figure 5 shows the classification of MSRs based on four criteria, i.e.,
structure,
locomotion,
forming factor, and
characteristics of reconfigurability [
42]. Note that this classification is made for recently developed MSR systems [
42]. From a structural perspective, a configuration in a
chain architecture consists of a set of modules that are assembled in a line or tree-like structure. It is more
versatile than other structures in the sense that it could relate to any point in space. Examples of MSRs with a chain structure are the
Modular Robot for Exploration and Discovery (ModRED) [
43], sTetro [
32], hTetran [
34], hTrihex [
44], PNSR [
35],
Karisruhe Autonomous Inspection Robot (KAIRO) [
45], HexaMob [
46], and
Step-Assembler-Bridge-Explorer Robot (SABER) [
47].
In a
lattice architecture, modules are built with a simple shape such as a cube or a sphere, and a system configuration is built by placing and connecting modules in a regular pattern in 2D or 3D. Since the motions of modules are controlled inside the modules and processed in parallel, a lattice structure can be reconfigured more easily than other architectures. However, when a configuration involves a large number of modules, encompassing all modules within the lattice becomes a challenge both technically and practically [
36]. Examples of MSRs with a lattice architecture are the mu-cube [
48],
FlexiblE and Reconfigurable Voxel-based Robot (
FERVOR) [
49], helical magnet modular robot [
50],
Deformable Self-organizing Nomadic Units (DONUts) [
51], and magnetically controlled modular cubes [
52]. Among these robots, the materials used to create modules for DONUts [
51] are unique; its modules are made from communicative, flexible printed circuit boards embedded with electrical and electro-permanent magnets. In the DONUts system, the circuit board is rolled into a loop, and it allows the module to be linked and travel over other modules. Such a robotic system is a good example of the use of soft materials in an MSR.
The system architecture can be
hybrid to achieve high-level reconfigurability, and the corresponding MSRs support both chain and lattice structures. Examples of hybrid MSRs are the
Modular Transformer (MTRAN) [
53], SUPERBOT [
54], M^3 [
55], Scout [
56], ModRED II [
57],
Self-assembling Modular Robot for Extreme Shapeshifting (SMORES) [
58], Armbot [
59], usBot [
60],
Easy-to-build Self-Reconfigurable Robot (EasySRR) [
61],
Hybrid self-reconfigurable Modular robot (HyMod) [
62], and Omni-Pi-tent [
63]. In a comparison of these hybrid MSRs, SMORES [
58], Omni-Pi-Tent [
63], and HyMod [
62] have shown the highest reconfigurability in terms of locomotion, while the algorithms for system reconfiguration are relatively simpler.
The architecture of an MSR can also be
freeform; this implies that the entire external surface of the robot can be used for docking. Based on this definition, DONUts [
51] can also be classified as a freeform MSR. Another example of a freeform MSR is a recently developed MSR system called FreeBOT by Liang et al. [
64]. The modules in FreeBOT are spherical; each module is allowed to be connected by others in any direction on a spherical surface, and this provides maximized flexibility in assembling modules into a configuration. There is no need to align two modules precisely via specified connectors. A freeform architecture maximizes the number of possible connections of a module with others. However, in its physical implementation, the connection of two modules is usually enabled magnetically, and it is weak in resisting a shear force or bearing a high load.
When all modules are made as rigid bodies, the reconfigurability and complexity are directly affected by the rigidity and strengths of modules. For a micro-scale MSR, modules with soft materials, such as in [
65,
66], are desirable since soft materials can achieve a high ratio of capacity and mass for continuous deflection with infinite degrees of freedom, rather than a finite DOF occurring in a joint between two rigid modules.
7.2. Docking Mechanisms for Assemblies
The means of assembling a module into a system configuration provide the second dimension of system reconfigurability. Therefore, the docking and undocking mechanisms of modules are critical to an MSR since they are designed to transfer mechanical forces (the fundamental requirement for most connectors), power, data, heat (thermal transfer), and fuel (if needed in some situations) [
1].
Table 1 shows some basic FRs for the docking and coupling mechanisms of modules based on the suggestions of Brunette et al. [
67].
Although most of the studies consider the load capacity of the mechanism in the design process, it is not a representative factor to determine whether they are able to create reliable connections in MSR systems of dozens or hundreds of modules. As a result, the load-capacity-to-module-weight ratio is determined to be a more quantifiable metric to accurately evaluate a capable design. Another important FR that should be considered in any docking mechanism design is the cost. Since MSRs are to be mass-manufactured, the components of a module must be inexpensive. If a connector is expensive to manufacture, its design might be too complex and should be further optimized.
The
gender (i.e., gendered, bi-gendered, and genderless) and
type (i.e., mechanical, magnetic, and electro-magnetic) of connectors are used to classify docking mechanisms. A coupling mechanism may have its gender depending on its mechanical design, and it affects the reconfigurability of the MSR directly. For a coupling mechanism with genders, both male and female connectors are actuated to engage or disengage another module. Gendered mechanisms provided strong connections with a high level of design complexity [
68]. An example of a bi-gendered coupling mechanism is a hermaphrodite connector coupled with an electromechanical connection capability named HerCel [
69]. Ni et al. [
70] presented a gendered coupling mechanism using SMA that offered high autonomy, a compact size, and fast responsiveness. Active male and passive female connections built a pair of connections. The actuation mechanism of a male connection is a two-way rotating SMA actuator. As an executive mechanism, a double-layer cam and claws were employed. For a configuration in 3D, the passive connection might be docked in five distinct directions. Connectors are mostly used for macro-scale MSRs. For a micro-scale MSR system, the connection of two modules is electrostatically or pneumatically actuated and implemented by controls [
71]. In particular, pneumatic soft actuators are commonly used as docking mechanisms for soft MSRs, and they can be integrated with stimuli-responsive materials such as
low melting point alloys (LMPAs),
shape memory polymers (SMPs), and thermoplastic materials whose stiffness is thermally adjustable. In a soft pneumatic actuator, a transformative design can be used to maximize its payload capacity, and this allows the adjustment of the degrees of freedom of mechanical motion [
41].
Due to limited loading capability and motion accuracy, most of the MSRs are at their preliminary stages of development, without showing their practical application in real-world industrial environments. A few of the MSRs adopt genderless connectors. A genderless mechanism offers the benefit that a connected module can be disengaged from a disabled module; this relates to the system’s resilience, called self-repairing. Genderless mechanisms are the most adaptable among the three types of locking and coupling mechanisms but they involve the most complicated designs of mechanical structures [
67,
68]. One example of such a system is the
Modular Manipulator System (ModMan) [
72], where the connections, inspired by lead screws, are applicable to high mechanical or power loads for an industrial manipulator [
73]. Other examples of MSRs with genderless locking mechanisms are Mori [
74], Genderless, High-Strength, Efficient, Fail-Safe, and High Misalignment Tolerant (GHEFT) [
75], FireAnt [
76], and Soldercube [
77].
From the perspective of connection types, the simplest mechanism is a magnetic connection; however, it is too weak to carry a high load, and it is easily disconnected. In addition, a significant amount of energy is needed to detach a module, the design is complicated, and more energy is consumed due to self-weight. Attaching and detaching can also be actuated electromagnetically, while it exhibits similar disadvantages of increased self-weight and high energy consumption [
78]. From the perspective of power sources, most locking and docking mechanisms require an isolated power source that is high enough for attaching or de-attaching [
79].
To determine the capability of the docking mechanisms presented in this section for system reconfiguration, their specifications are compared to the FRs defined above and shown in
Table 2.
There is no mechanism presented that fully satisfies the FRs, and not all the data for the FRs are reported, which indicates that several mechanisms are designed without the consideration of all the necessary requirements for efficient system reconfigurability. Some connectors have a high load capacity but are still not robust enough for their system. For example, GHEFT has a high load capacity of 240 N but a load-capacity-to-module-weight ratio of 3, which means that it can only hold three other modules in its system. Most of the recently designed docking mechanisms are genderless, which is expected as it is the most adaptable type of connector despite its design complexity. Although there are still some other types of connectors proposed, the future trend will be genderless only. Another important FR that is not receiving enough attention is the cost of the design. As can be seen in
Table 2, most of the presented connectors do not report their cost. This may be because the docking mechanisms presented here are still prototypes in laboratories with the main purpose of proposing new design ideas and the cost will be considered in the final design stage, when the designs are optimized for manufacturing.
There is also the need to qualify the tolerance that a system designer needs to know regarding an MSR, so that the docking mechanism can still fulfill a task even if the tolerance is found to be an extreme value within the tolerance. Seo et al. [
80] proposed an evaluation index called the
area of acceptance (AA) to specify the required tolerance. AA refers to the potential errors in the whole range of given translational, rotational, and hybrid motions when two docking connections are assembled.
8. Control Algorithms in Operating MSRs
A robot configuration in an MSR is tailored to a given application, and some heuristic methods, such as
genetic algorithm (GA),
brute-force optimization,
simulated annealing techniques, and
evolutionary algorithms, can be used to determine a robot configuration when a task is specified. In general, the configuration design of an MSR is a combinational design problem whose design variables are (1) the selection of modules and (2) the topologies and patterns of assemblies of selected modules. The complexity of the configuration design depends on that of the system architecture, i.e., the number and types of modules as well as the docking mechanisms of modules [
1]. In this section, the recently proposed control techniques are classified into (1) module-level control, (2) system-level control such as motion control and navigation, (3) self-reconfiguration algorithms, and (4) self-repairing algorithms. The development of these control algorithms is discussed below, respectively.
8.1. Module-Level Control
Since MSR systems are assembled from multiple independent modules, the individual modules need to be able to move around and collect and process data autonomously and efficiently. The module designs of existing MSR systems are very different from each other in terms of the hardware architecture, module geometry, degrees of freedom, locomotion, and docking mechanism, as well as onboard sensors, depending on the intended working environment. As a result, the motion control method at the module level varies between different developed MSRs. Recently proposed modules are designed for specific jobs, such as cleaning, inspection, and maintenance, with dedicated motion control approaches suitable for their working environments. For example, a robust output feedback controller was proposed for hTrihex [
44], a floor-cleaning robot, to deal with liquid (disinfectant, detergent, chemicals) oscillation inside a moving container by utilizing available onboard sensors. Although the proposed method was validated on hTrihex, it was only applicable for certain cases such as symmetrical weight distribution on the modules [
19].
In another research work, convolutional neural networks trained in TensorFlow™ (Mountain View, CA, USA) were used to process images from cameras to help a cleaning robot to detect and avoid cracks on glass windows while cleaning the surfaces. The neural networks were able to detect the cracks from live video with high accuracy of 90%. However, the crack detection algorithm was not processed onboard but on a separate computer. It also was not able to maintain maximum coverage of the cleaning area while avoiding cracks [
81].
To lower the cost of sensors installed on autonomous mobile robots, Kis et al. used the data from low-sampling-rate LiDAR sensors in a simultaneous localization and mapping algorithm to control the robot autonomously [
82]. Although the algorithm effectively mapped the working environment from noisy collected data at a low sampling rate, it was not reliable to detect the exact position of the robot in the workspace.
8.2. System-Level Control
A robotic configuration in an MSR system consists of a number of encapsulated modules with local controllers; therefore, system-level control focuses on the coordination and collaboration of local controllers of active modules, and the system-level control algorithm is decentralized rather than centralized for an integral robot. Vrohidis et al. [
83] discussed the decentralized and distributed controls for a group of connected robots to avoid collisions in operation; the developed algorithm was capable of reconfiguring communications when an obstacle was detected, without jeopardizing the global connectivity of the communication graph. However, the solution was only validated in simulation and was still not optimal as the algorithms would suggest overly complicated configurations in some cases. Other examples of using distributed and decentralized control algorithms are SMORES [
84], cubic modular robots [
85], and Roombots [
86].
Like an industrial robot, the motion of a reconfigurable robot is mostly controlled based on its kinematic model, even if a task involves dynamic requirements. The motion control algorithm of a reconfigurable system must be capable of detecting changes in operating conditions and responding to detected changes adequately. Therefore, the control algorithm of an MSR is highly relevant to sensing solutions. For example, the task of tracking multiple objects tends to be computationally expensive and requires high-performance servers to execute the control algorithm in a real-time model. This presents a major challenge at the module level since onboard computing resources are strictly limited to individual modules. To tackle this challenge, Romanov et al. [
87] proposed a method to reduce computation in tracking multiple objects in the motion control of an MSR system, which was demonstrated on actual hardware. Besides limited computing power, when a configuration is formed in an MSR system, the system-level pattern of locomotion is unknown to individual modules, and it is critical for the constitutive modules to learn how to coordinate and collaborate with each other so that the configuration as a whole can fulfill the given task over time. Therefore, Dutta et al. [
88] discussed the challenges in learning the movement pattern of a robot on the fly, and a game theoretic method was developed for multi-agent reinforcement learning; it was used in the motion controls of modules with the minimization of the travel time. The algorithm was only validated in virtual simulation, despite the fact that the physical hardware of the MSR that it was designed for, ModRED [
43], was available. As an attempt to generalize the locomotion control system to any modular robot, Demin [
89] developed a generic motion control method applicable to any MSR system; the motion control program could be reprogrammed automatically based on the information of changed tasks and the information of a new configuration in the system. However, the method was only validated with virtual robots, not physical ones.
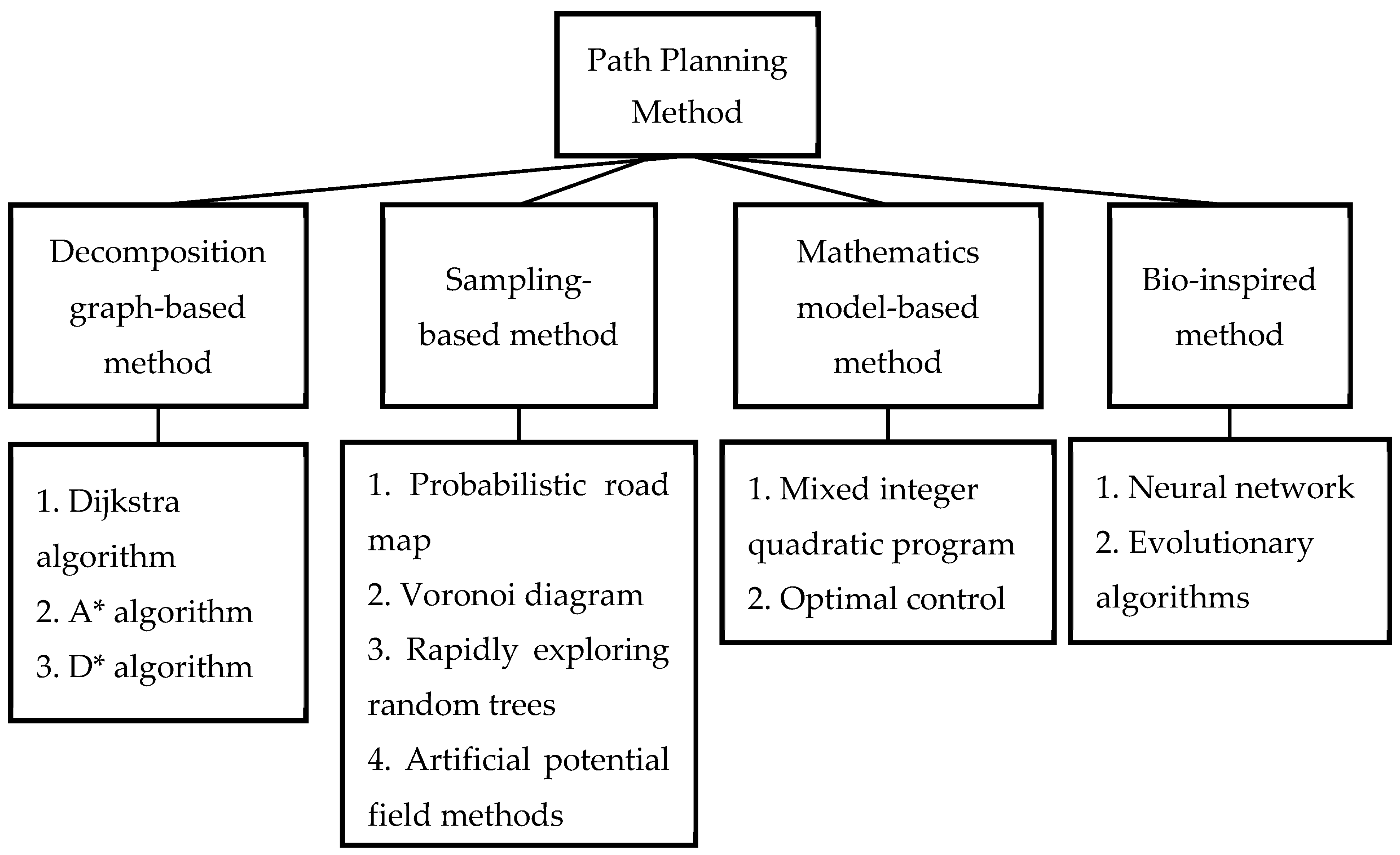
Numerous missions require robots to travel from one location to another without any violation to constraints in the environment. The path of a robot has to be planned to avoid obstacles or interferences.
A navigation algorithm is applied to plan a robotic path from its initial location to its designated location without any interference. As shown in
Figure 6, Madridano et al. summarized the existing algorithms for the path planning of MSRs [
90].
Pfotzer et al. [
45] proposed a navigation method using the Rapidly Exploring Random Trees (RRT) algorithm for a modular reconfigurable snake-like robot assembled from different types of modules (KAIRO 3), to deal with obstacles such as stairs and giant steps automatically. Although the method showed positive results in real-world experiments on KAIRO 3, it did not account for the change in the mass distribution of the snake robot when overcoming obstacles, which made the robot fall over in some cases. On the other hand, Omisore et al. [
91] investigated a damped least-squares (DLS) method combined with a deep neural network (DNN) for the inverse kinematics (IK) of an eight-link snake-like robot to deliver drugs in the human body. The method was proven to control the robot’s end-effector with higher precision and speed in comparison to existing IK methods. However, the neural network did not have the ability to adapt to unexpected situations and the proposed method needs an obstacle avoidance capacity for the robot to be applicable.
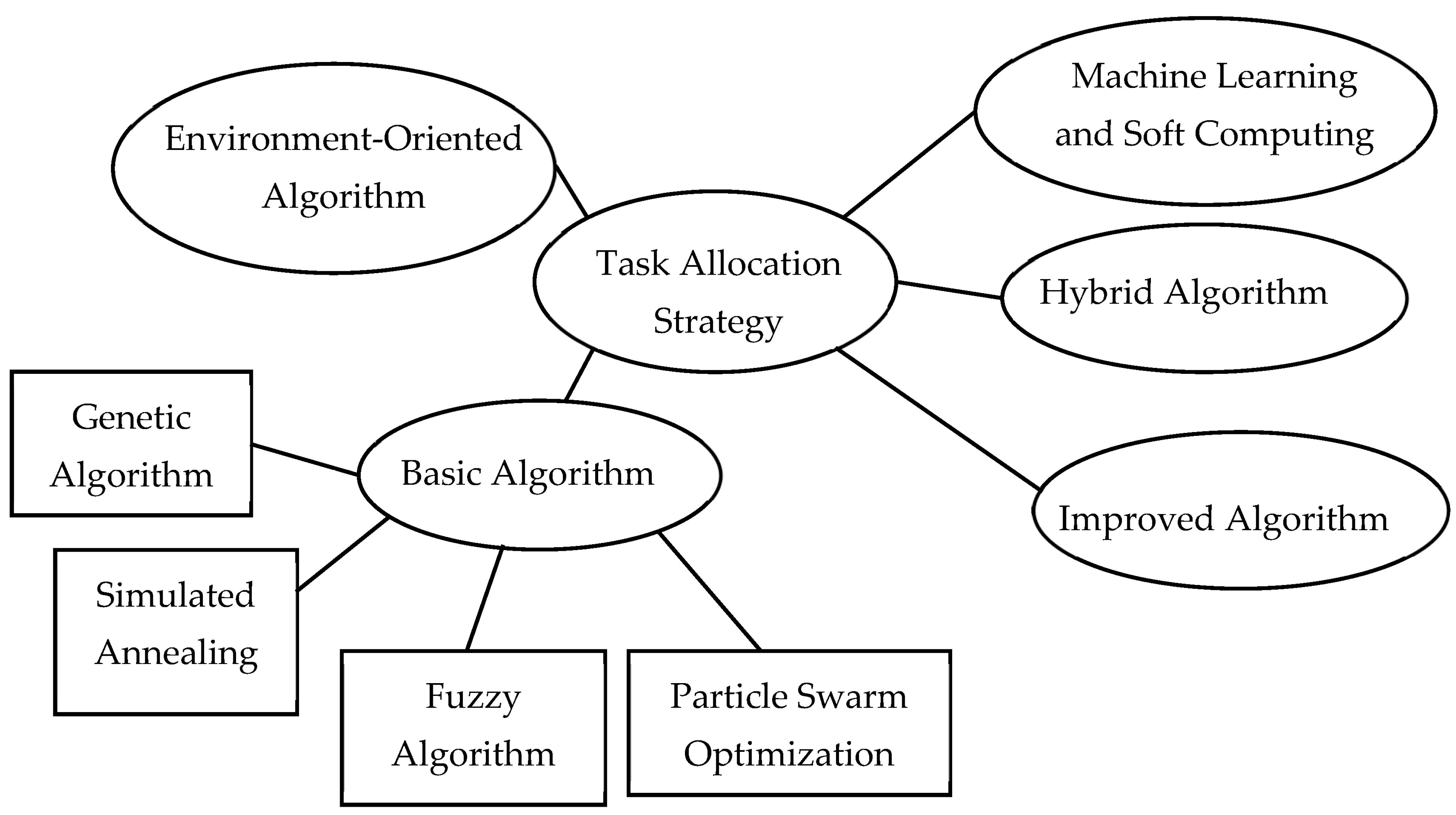
In manufacturing applications,
task allocation (TA) is crucial since it affects the effectiveness and efficiency of a production system significantly.
Figure 7 describes the classification of common methods for MSRs to deal with TA in manufacturing [
92].
For example, to support the collaborative assembling of heterogeneous mobile manipulators, Marino and Pierri [
93] developed a generalized approach for an unknown number of robots to manipulate unspecified manipulating loads. One of the advantages of this method was that it did not require communication between the robots performing the task. The method was shown to be efficient for four robots to grasp and move a disk from one location to another in simulation. However, the approach needed to be further developed and implemented on actual robots, where assumptions such as the robots’ perfect force tracking or no obstacles did not hold.
Manufacturing tasks often require precise object handling and assembling, and there are many impedance control strategies for traditional manipulators in the literature. MSR systems in a chain configuration with wrist force sensors on the end-effector can also be used as manipulators. However, the MSR system requires decentralized control and does not have a joint torque sensor. To tackle this problem, Zhang and Du [
94] developed a decentralized controller with two closed loops for a reconfigurable robot with a force sensor at its wrist module. The proposed controller was shown to achieve the desired position and force at high precision and convergence time in the simulation. Further research is needed to implement the controller on physical hardware, to demonstrate the usability of MSRs in manufacturing.
8.3. Self-Reconfiguration
Self-reconfiguration is a unique property of MSRs that differentiates them from traditional rigid robots as it allows a system of MSRs to alter its morphology by reconfiguring its initial modules’ connections (configuration A) into a goal configuration (configuration B) in order to respond to a change in its working environment [
37].
To investigate a self-reconfiguration strategy in floor-cleaning robots, reinforcement learning was used in hTrihex and hTetro to generate the optimal set of shapes simultaneously by pre-training in a predefined environment in [
44,
95]. The approach was faster and had a lower energy cost than traditional Completed Area Coverage Planning (CACP) methods. Although the tiling robots were able to reconfigure their morphology to cover cleaning areas with obstacles optimally, the proposed method needed to be extended to cover the cases where the workspace was unknown.
Inspired by the art of origami, Yao et al. [
96] proposed to construct a 3D configuration from initial 2D configurations while maintaining the initial connections of modules. This avoided the accumulation of misalignments when modules were docked or undocked, and such a strategy was verified by simulation on Mori [
97]. The work was still at the preliminary stage, where the self-reconfiguration strategy was only able to fold limited 3D shapes from the initial patterns. In addition, the algorithm also needed to account for collision between the modules and the motion control of the folded 3D configurations.
Although self-reconfiguration is already a very complex problem that usually requires computationally intensive algorithms, the limited processing power of onboard hardware makes this task even more challenging. To perform self-reconfiguration, an MSR system must collect data from the surrounding environment using the sensors available on each module; then, the module’s onboard processing units communicate with each other to determine the goal configuration from the collected data. However, the enormous amount of collected data from many modules of a large-sized MSR system can easily overload the storage of the processing unit. To tackle this problem, several approaches have been introduced recently. For example, Majed et al. [
98] proposed a control algorithm for a homogeneous MSR system that can reduce the redundancy of sensed data and self-reconfigure to adapt to changes in the surroundings using a fuzzy logic algorithm. However, the approach was only validated in a simulation where simple assumptions were made about the sensors and the available set of configurations of the MSR. Further research still needs to be done to account for the movement of physical modules during the self-reconfiguration process. On the other hand, Baca et al. [
99] proposed a distributed configuration discovery algorithm allowing a module to find the belonged configuration; this improved the autonomy and robustness of modules with restricted processing resources. The effectiveness of the proposed algorithm was validated by experiments on ModRED II [
57].
8.4. Self-Repair
System resilience is one of the primary features of MSR systems, and self-repairing is one aspect of system resilience. Self-repair enables an MSR system to swap out broken modules for functional ones while carrying out the current mission. To self-repair, the system needs to identify the malfunctioning module, disconnect the ineffective module, and replace it with a new functional module. It can be considered to be a special type of self-reconfiguration as the configuration of the system is changed during the repairing process [
36].
The investigation of modeling and controlling methods in regard to self-repairing has attracted a great deal of attention recently. For example, Yang et al. [
22] proposed a self-repairing technique for a solar power satellite (SPS). It was based on the concept of digital hormones, inspired by the functions of hormones in a biological system; every module acted as an endocrine cell. Although the physical prototypes of the MSRs used to construct the SPS were built to demonstrate the locomotion of the modules, they did not have the required hardware to perform the proposed self-repairing strategy. As a result, the strategy was only validated in simulation and further research is needed to realize the strategy.
In contrast to the previous strategy, where the faulty modules were ejected from the initial configuration and spare modules were brought into the configuration to replace the faulty ones, Liu et al. [
100] developed a gradient-based self-repairing method where some modules in the initial configuration were utilized to replace the malfunctioned ones to maintain motion synchronization, which was useful when spare ones were not available. The method tackled the problem of module failures in an MSR system that was moving in a certain formation on the ground. The self-repair was guided by numerous self-repairing rules, and it was accompanied by recursive self-repairing controls. In this study, the modules did not dock to each other but maintained a specified relative distance while moving as a unit. On the other hand, Nokhanji and Santoro [
101] proposed a distributed self-repairing method that allowed normal modules in a basic chain configuration to replace broken ones and reconstruct the chain regardless of the number of abnormal modules. However, this strategy was still a theory and not validated by simulation or experiments. To detect underperforming modules such as a module with a low level of power or faulty function, Zhou et al. [
102] suggested monitoring every active module by measuring the difference between desired and actual variables such as displacement and force. The method demonstrated its effectiveness on physical hardware and should be further developed into a self-repair algorithm that makes replacement decisions based on the health of individual modules.
9. Challenges and Future Opportunities
Many studies have been conducted on MSRs in terms of aspects such as the quantification/functional requirements of reconfigurability, system architecture, hardware designs, task-oriented configuration designs, decentralized controls, and self-repair, although most of the developments are at their preliminary stages, without the validation of real-world applications. To expand the application of MSRs in the physical world, theoretical and technological developments must be advanced in all aforementioned aspects.
This paper focuses on new mechanisms of robotic modules for high reconfiguration—more specifically, adjustable mechanisms within a module and innovative docking mechanisms for assemblies. In regard to docking mechanisms, existing designs satisfy basic FRs in connecting a number of modules as a robot configuration; however, most of these solutions lead to limited system reconfigurability due to a number of factors, such as the need for too many repeated modules, weak supports at connections, and poor load and self-mass ratios. For example, a set of modules in a series may result in a large amount of bending moment, which causes the significant deflection of modules and confines the capability of a robot greatly. The cost of an MSR system may be increased dramatically since each module as well as its docking mechanism must be sturdy enough to support multiple additional modules; in addition, the torque power consumption of active modules could be increased dramatically in driving modules. Note that it is not always feasible to increase the motor capacity when the number of coupled modules becomes large. Despite the fact that an MSR is supposed to be low-cost for mass manufacturing, the prototypes in the literature have failed to take the aforementioned factors into account.
In regard to the optimization of robotic modules, EasySRR [
61] introduced an optimized version of MTRAN to take into consideration space utilization, structural soundness, and assembly complexity. A robotic module was produced from off-the-shelf electrical components and customized parts from 3D printing. The same method may be used to improve existing designs or create new ones in the future. With the advancements in soft materials, future research may be undertaken to replace the inflexible structures of MSRs and produce a new type of MSR that can vary the shapes of individual modules depending on their tasks.
10. Summary
Here, our observations of the existing literature in the following aspects is summarized: (1) MSR applications, (2) the importance of system reconfigurability, (3) research trends in MSR development, (4) MSR design methodologies, (5) existing hardware designs, and (6) recently developed control algorithms.
MSR applications. Due to its versatility, resilience, and autonomy, the MSR is expected to be used in multiple industries. MSRs are classified into macro-scale and micro-scale based on their size and their applications are explored accordingly. Macro-scale MSRs have many uses in the manufacturing industry due to the increasing demand for customized, short-lifecycle products and in space operations, where human presence is not always available. They also have potential in assistive furniture and assistive rehabilitation technologies. For micro-scale MSRs, their long-term goal is to find, synthesize, and use the laws that allow artificial materials to mimic the functions of biological systems, especially the superior adaptability to changes and uncertainties in dynamic environments, with applications in drug delivery vehicles, efficient catalysis, reconfigurable microsurgical devices, self-healing materials, etc.
Importance of system reconfigurability. Since 2010, the number of published papers on RMSs has increased significantly because manufacturers are seeking to develop smart and reconfigurable machines and tools as an answer to the dynamic global market. Industrial robots were the primary manufacturing resources for automation production. Now, MSRs will be the backbone of RMSs. COVID-19 has brought numerous challenges for global supply chains to respond to emergent medical and healthcare needs; the exposed issues included rigid shipping and storage capabilities, labor shortages for immediate production expansion, and slow responses to new governmental regulations and rules. The system architecture of a robot system should be modular in the sense that a variety of modularized functional modules can be selected and assembled into different configurations to fulfill a wide range of tasks; additionally, general-purpose and standardized mechatronic components such as visions and end-effectors can be easily integrated to meet specific project requirements.
Research trends in MSR development. At the beginning of the development of MSRs, researchers focused on finding new hardware architectures and the corresponding control algorithms to increase the reconfigurability and modularity of robots so that they could be used in a wide range of operations in unknown conditions. Although the initial goal remains a challenging task, one of the recent research trends shows the transition from developing MSRs for multiple tasks to proposing task-specific MSRs as immediate solutions to existing problems. Another one of the research trends is the focus on control algorithms and mechanisms for self-reconfiguration, instead of finding new hardware architectures.
MSR design methodology. MSRs can be designed by bottom-up or top-down methods depending on the research focus on hardware or control development, respectively. Regardless of which method is chosen, the designed systems should possess (1) modularization, (2) actuation, (3) standardization, (4) intelligence, and (5) serialization.
Hardware design. There are four ways to classify MSRs: structure, locomotion, forming factor, and characteristics of reconfigurability. In structure classification, there are chain, lattice, hybrid (chain–lattice), truss, and free-form architectures. Researchers have been focusing on the first three architectures as they can be achieved with conventional rigid-body modules. One of the essential mechanical features of an MSR is the docking mechanism, which can be classified by gender (i.e., gendered, bi-gendered, and genderless) and type (i.e., mechanical, magnetic, and electro-magnetic). Mechanical genderless mechanisms are the most adaptable and reliable types of locking and coupling mechanisms as they provide a strong connection and allow a connected module to be disengaged from a disabled one. However, they involve the most complicated designs of mechanical structures. For micro-scale MSRs, soft materials are desirable for structural designs and docking mechanisms since soft materials are able to achieve a high ratio of capacity and mass for continuous deflection with infinite degrees of freedom, rather than the finite degrees of freedom occurring in the joints of rigid modules. Although many prototypes have been built in laboratories, future research in terms of material selection, fabrication processes, module weight and load carrying capacity, and reliable and energy-efficient docking mechanisms may be conducted to reduce the costs of MSRs for mass manufacturing.
Control algorithm. In the literature, many studies of hardware are proposed without advanced versatile control, while research on control algorithms rarely applies them to the available robots. Hence, future research is needed to integrate the two main features of MSRs. To allow the adoption of MSRs for industrial applications, the remaining issues in newly created designs require improved solutions in terms of materials, structural designs, fabrication costs, and appropriate control algorithms.
11. Conclusions
To meet the rising demand for MSRs in multiple industries, the research efforts in MSR systems have been increasing over the years. A large number of MSRs have been developed recently; each has its own unique properties in terms of mechanical structure, system architecture, and control methods. However, the survey shows that the field of MSRs is still in its preliminary stage, since most of the systems are only prototypes developed in laboratories and not commercially available. This is true for both of the two most important aspects of MSRs presented in this study: hardware and software/control. The current state of MSR hardware developed from the bottom-up method has complex mechanical structures and mechanisms, but its control algorithms are not capable of utilizing all of those mechanical advantages. Meanwhile, most of the developed control algorithms using the top-down method are too generic and complicated to apply on the available hardware. In fact, most of these algorithms are theoretical and only demonstrated in computer simulations. As a result, further research is needed to find a common ground between these two aspects.
Developing a fully operational MSR system that can be used in multiple industries is a very complex problem since it requires a one-size-fits-all solution, which is why some researchers have recently tried to tackle this problem at a more manageable scale and focused on developing MSRs for specific tasks. This creative approach can be a quick way to design limited-feature MSRs for commercial use. In the long run, the mechanical structures, reconfiguration strategies, locomotion control, and other important properties of these MSRs can be synthesized into a design library that can be used to create general-purpose MSR systems.
As with the majority of the studies in the field, this survey is subject to some limitations that could be addressed in future research. First, there are many different approaches to designing an MSR system, but our work only discussed the two MSR design methodologies (bottom-up and top-down) that are widely used to develop the majority of MSRs. Although the inclusion of unconventional design approaches does not have significant effects on the findings in this survey, it would make the discussion more comprehensive. Second, the study focused on the recent studies on docking mechanisms specifically for MSRs. However, since there are similarities between the docking mechanisms for MSRs and non-reconfigurable modular robots (i.e., industrial robots) in terms of FRs, the survey could be expanded to cover docking mechanism designs in other fields, utilizing their advancements and generating more ideas for researchers to incorporate into their MSR systems.
The findings in this survey suggest a few potential directions for future research. First, with the advancements in soft materials, future research may be undertaken to replace the inflexible structures of macro-scale MSRs and produce a new type of MSR that can vary the shapes of individual modules depending on their tasks. Second, the design of the docking mechanism, one of the most important features of an MSR, will need to be further improved to satisfy all the defined FRs, especially in terms of the cost and load-capacity-to-module-weight ratio.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}