
Design and Simulation of a Seven-Degree-of-Freedom Hydraulic Robot Arm

Abstract
:1. Introduction
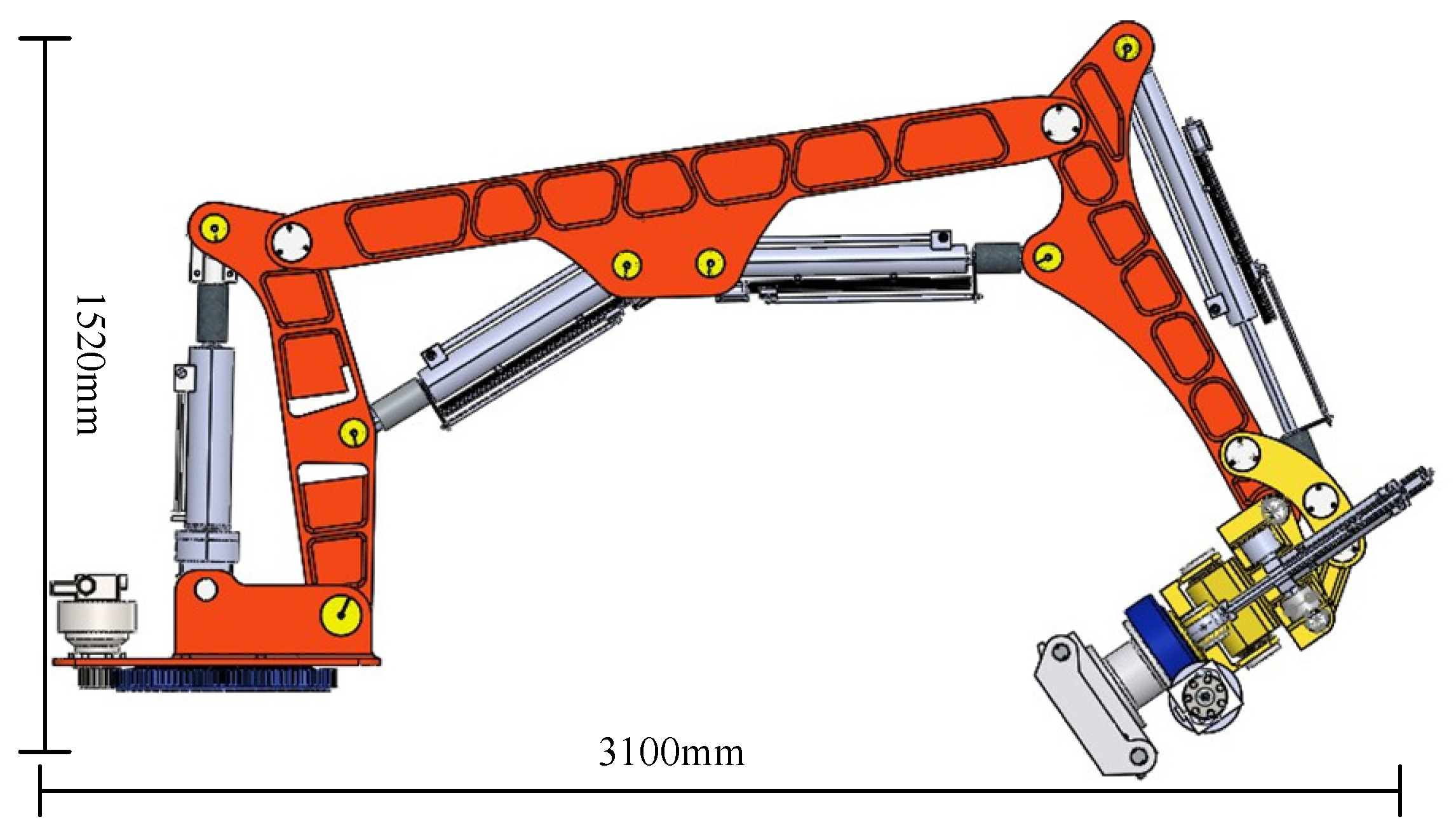
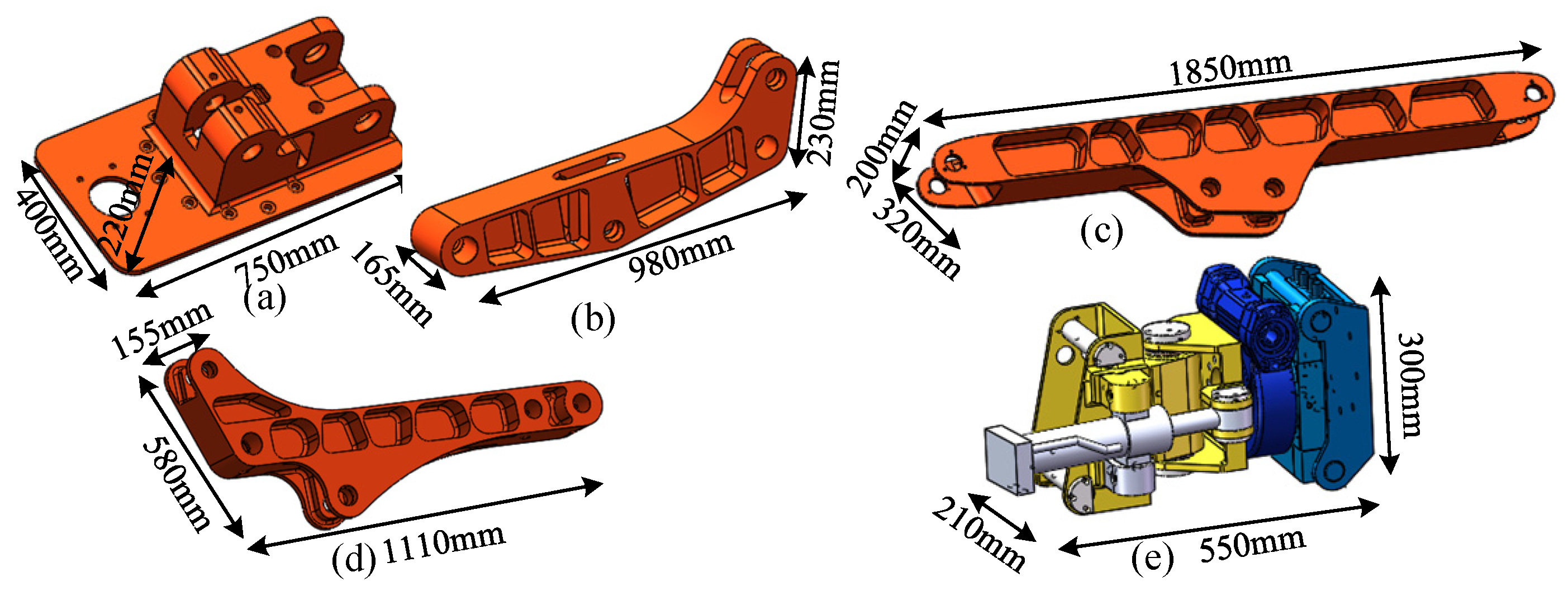
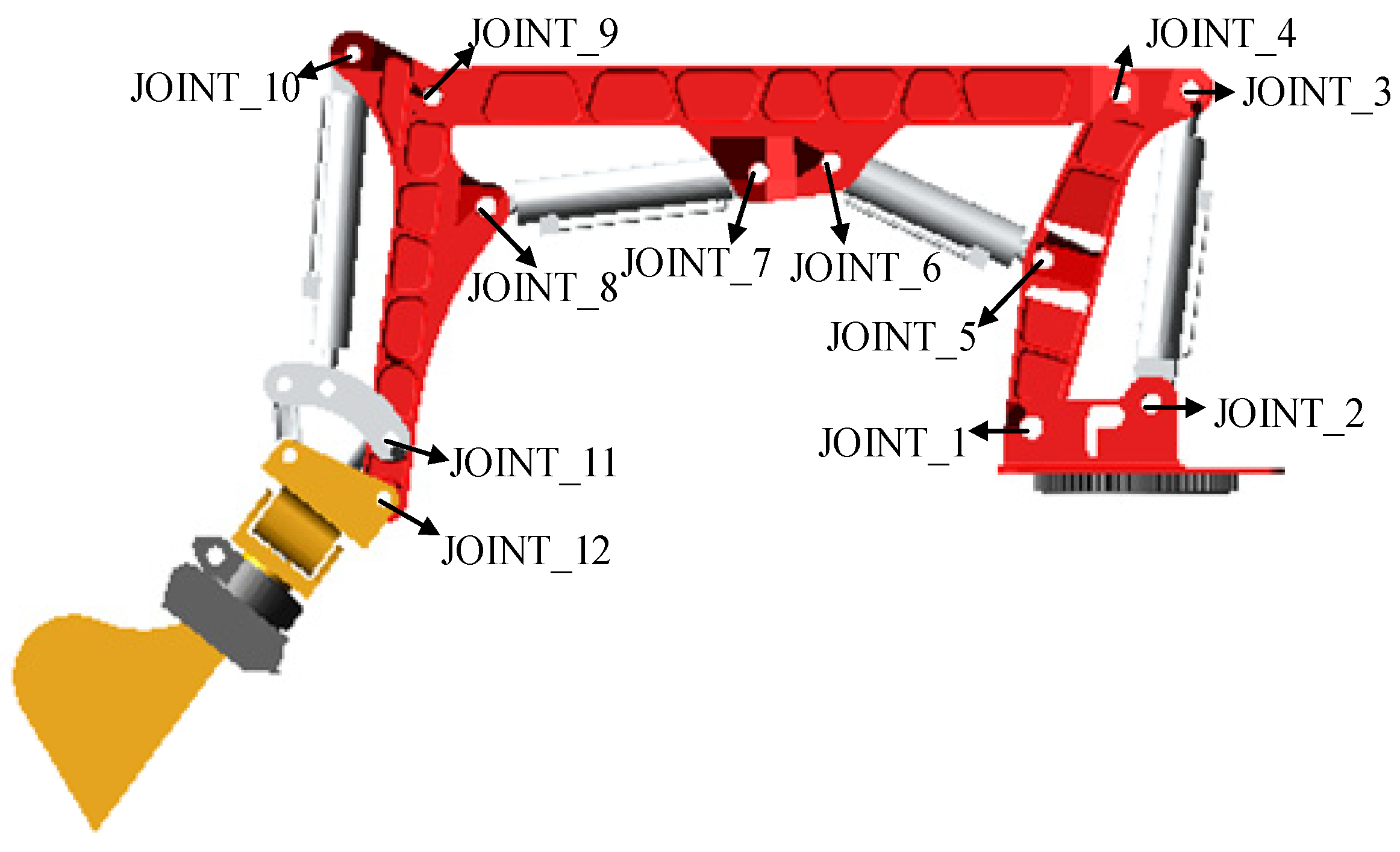
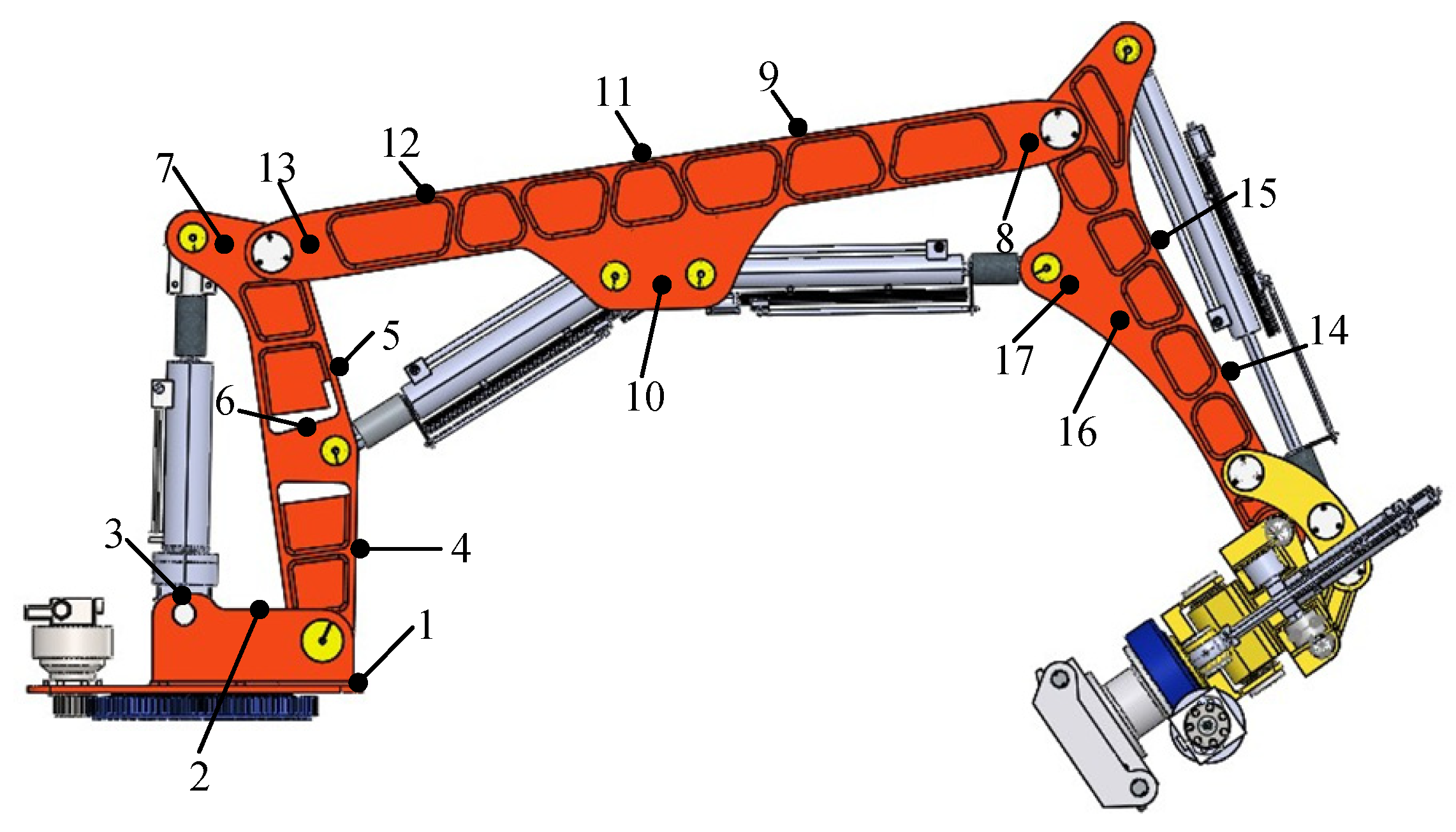
2. Structural Design of 7-DOFs Rescue Robotic Arm
- (1)
- Because the homes of the current population are mostly made of reinforced concrete, earthquakes cause the walls to come off and crack. As a result, the robotic arm should be able to support and transport the collapsed wall with enough weight capacity.
- (2)
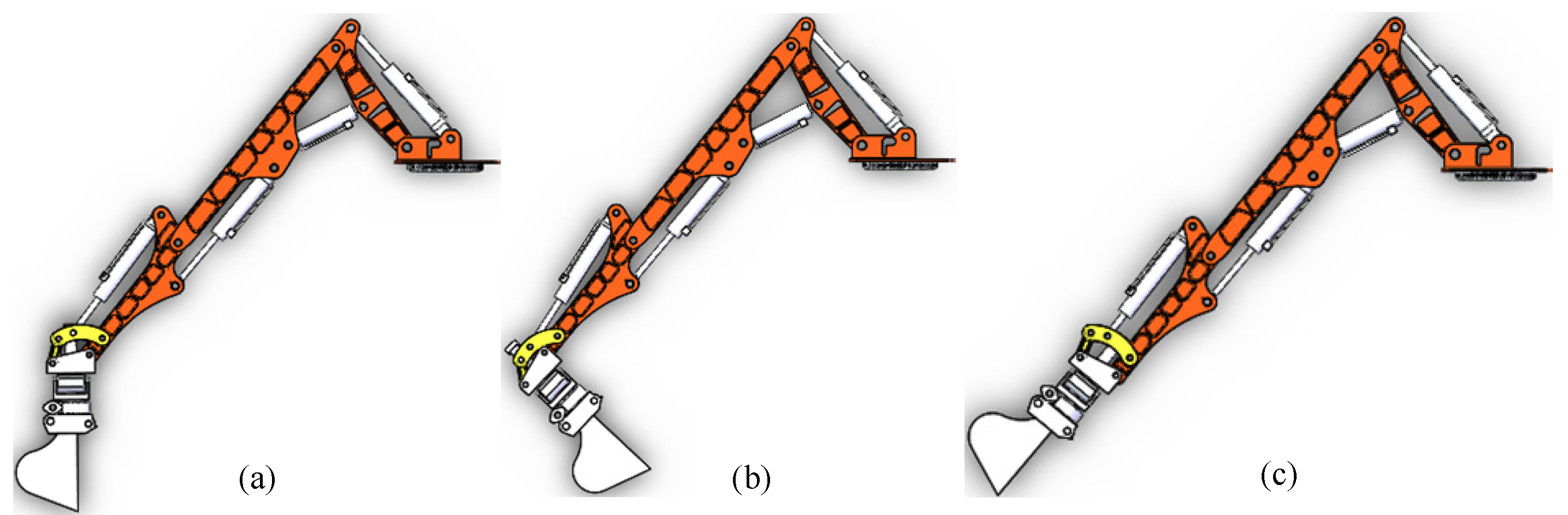
- The post-earthquake debris formation is largely random, and the situation for rescue operations is very unstable. The robotic arm must have a high degree of flexibility as well as strong adaptive and movement capabilities for the complex road surface in order to respond to the complex and changing rescue needs. In order to rescue the trapped people from the small space, the robotic arm must be able to quickly adjust its position to the best rescue state.
- (3)
- After the earthquake, the rescue road is severely blocked, making it impossible for rescue supplies to be transported to the disaster site by land at first. In order to meet helicopter lifting requirements, the weight of the entire robot arm should be kept within a reasonable range.
3. Mechanical Performance Analysis of Robotic Arm under Different Working Conditions
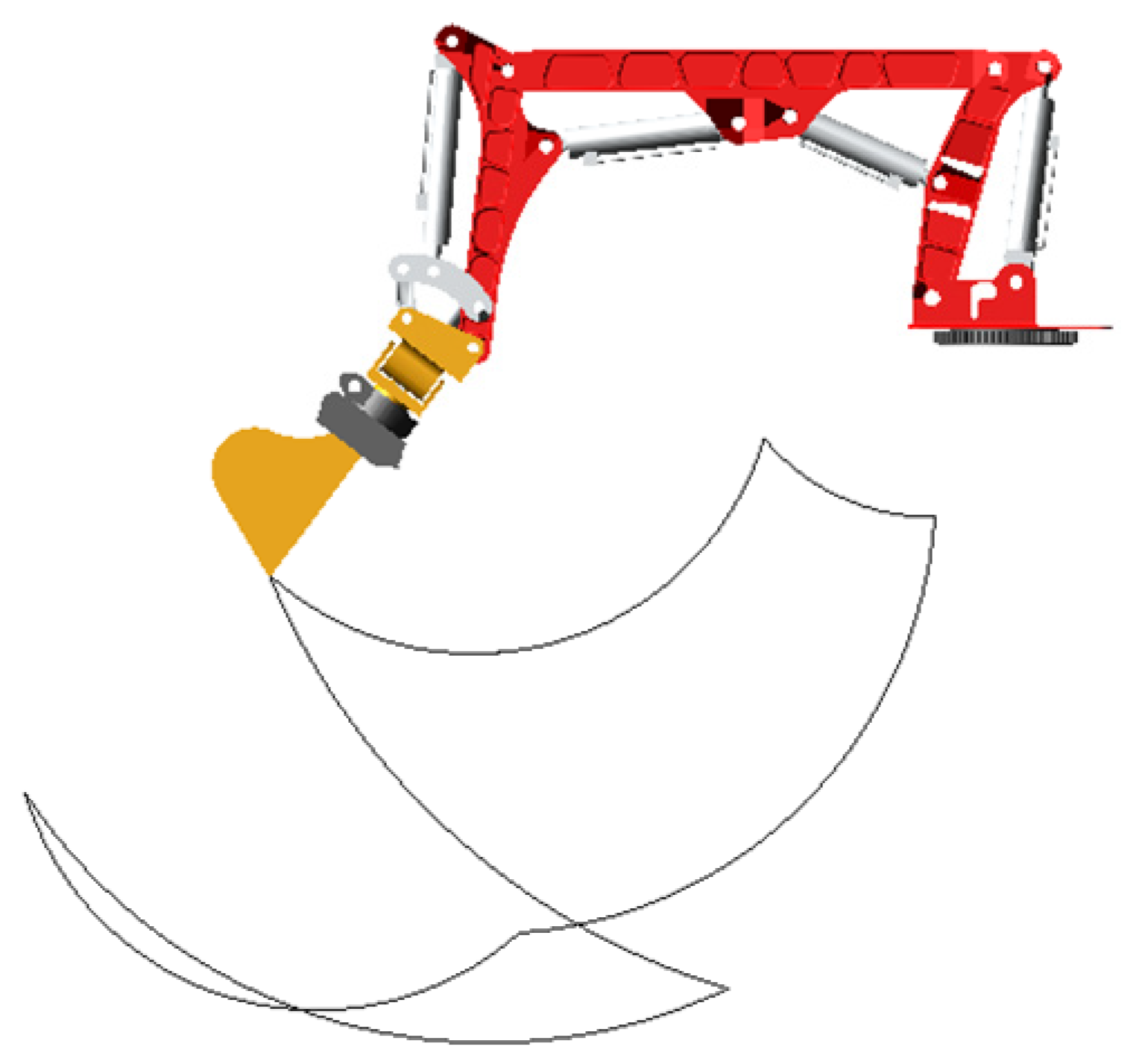
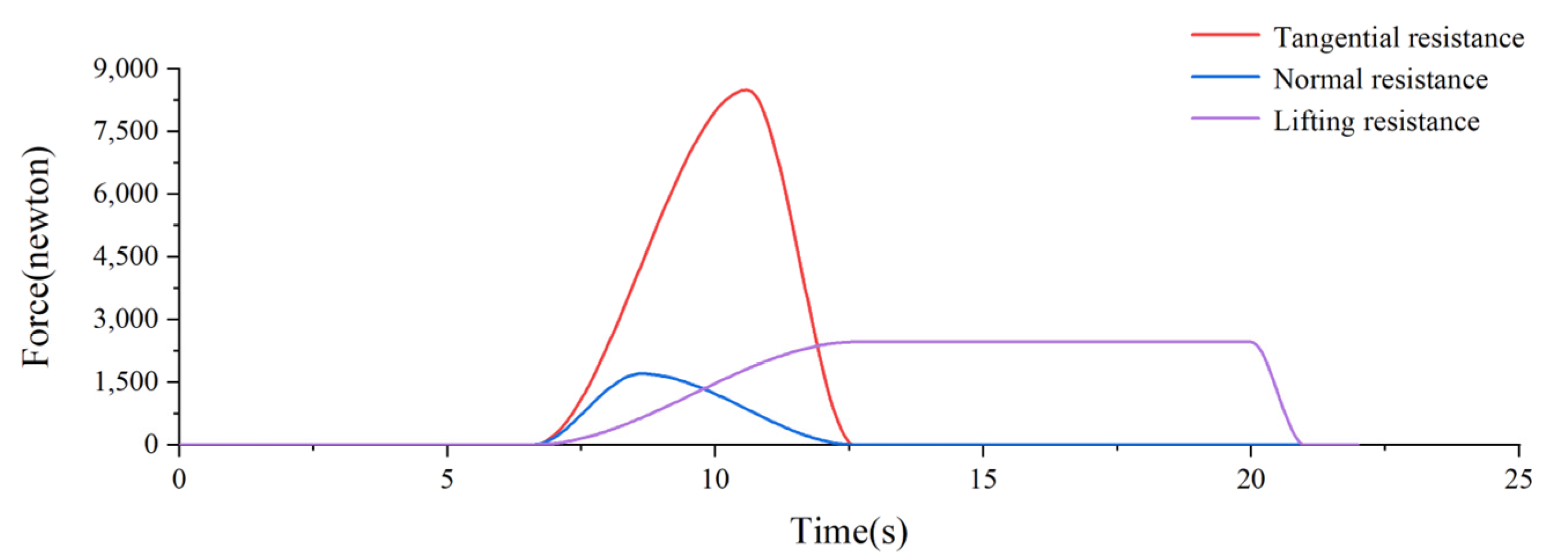
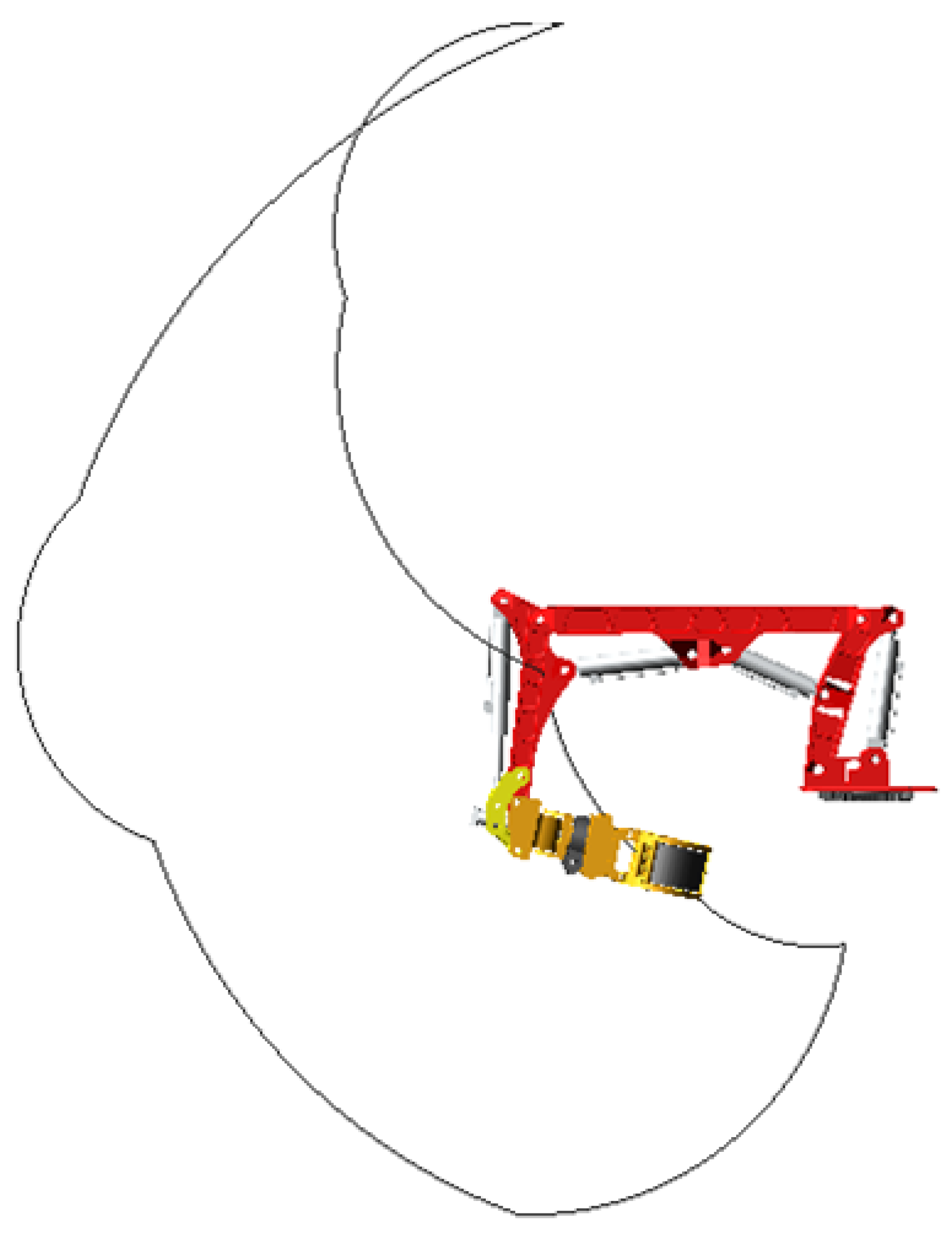
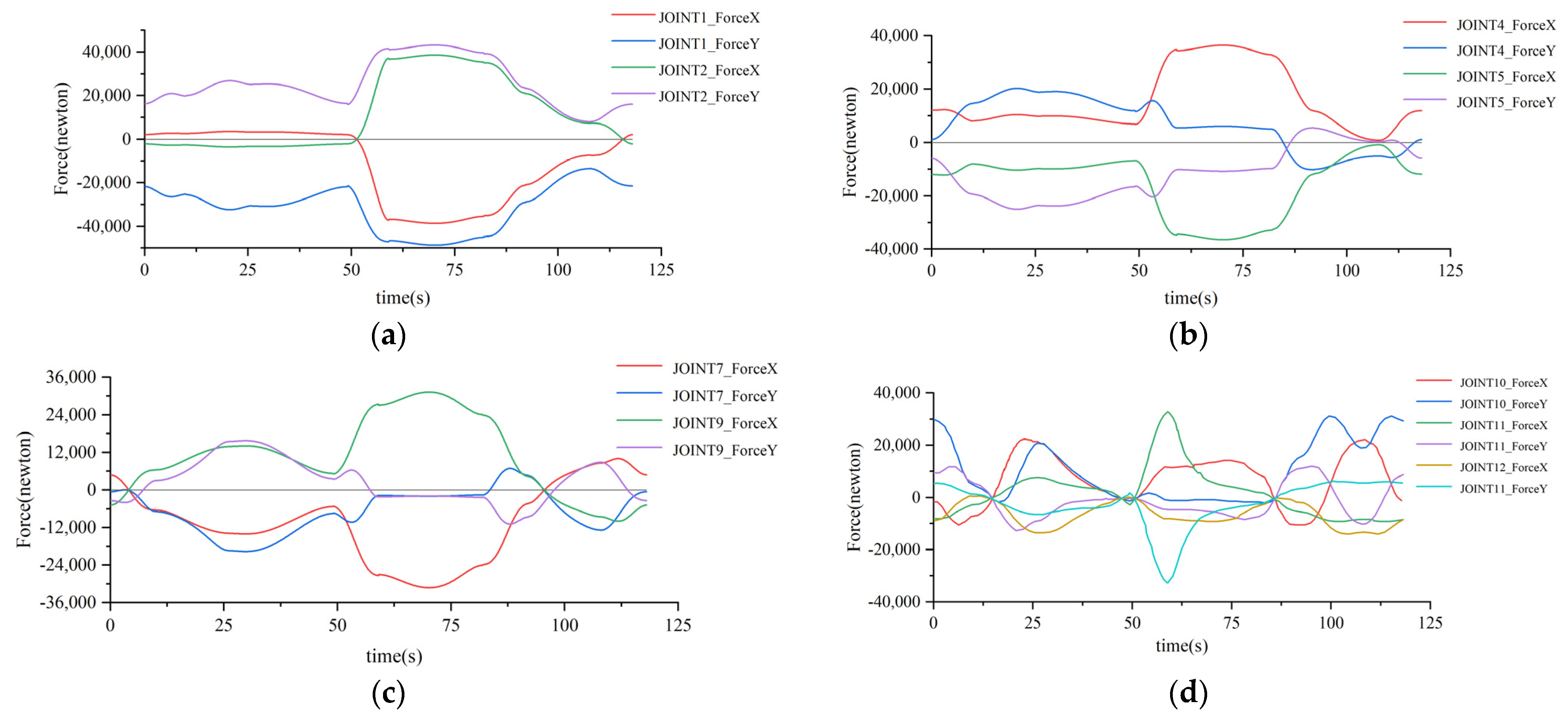
3.1. Dynamic Simulation of Robotic Arm under Excavation Conditions
3.2. Dynamic Simulation of Robotic Arm Handling Heavy Objects
4. Finite Element Static Analysis of Key Components
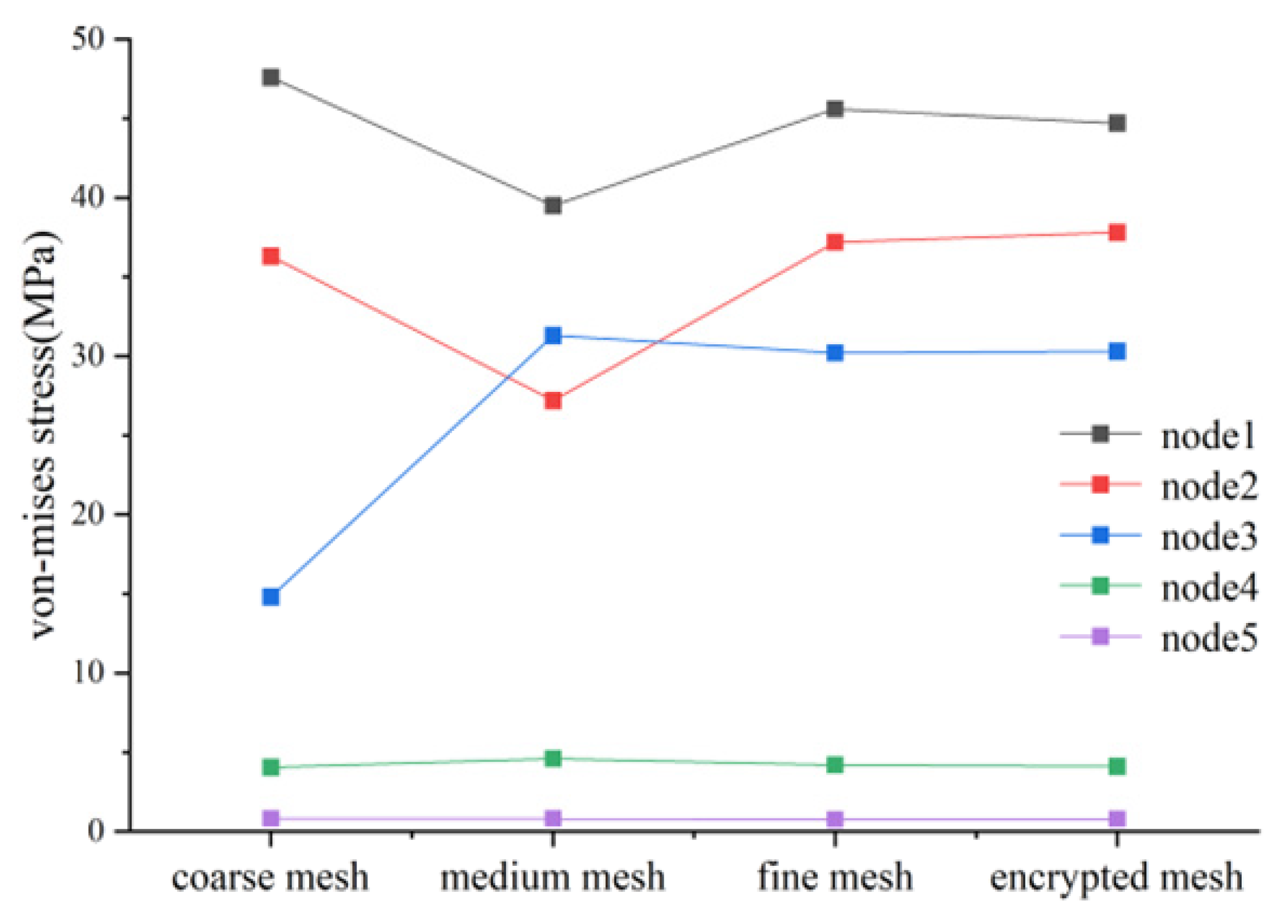
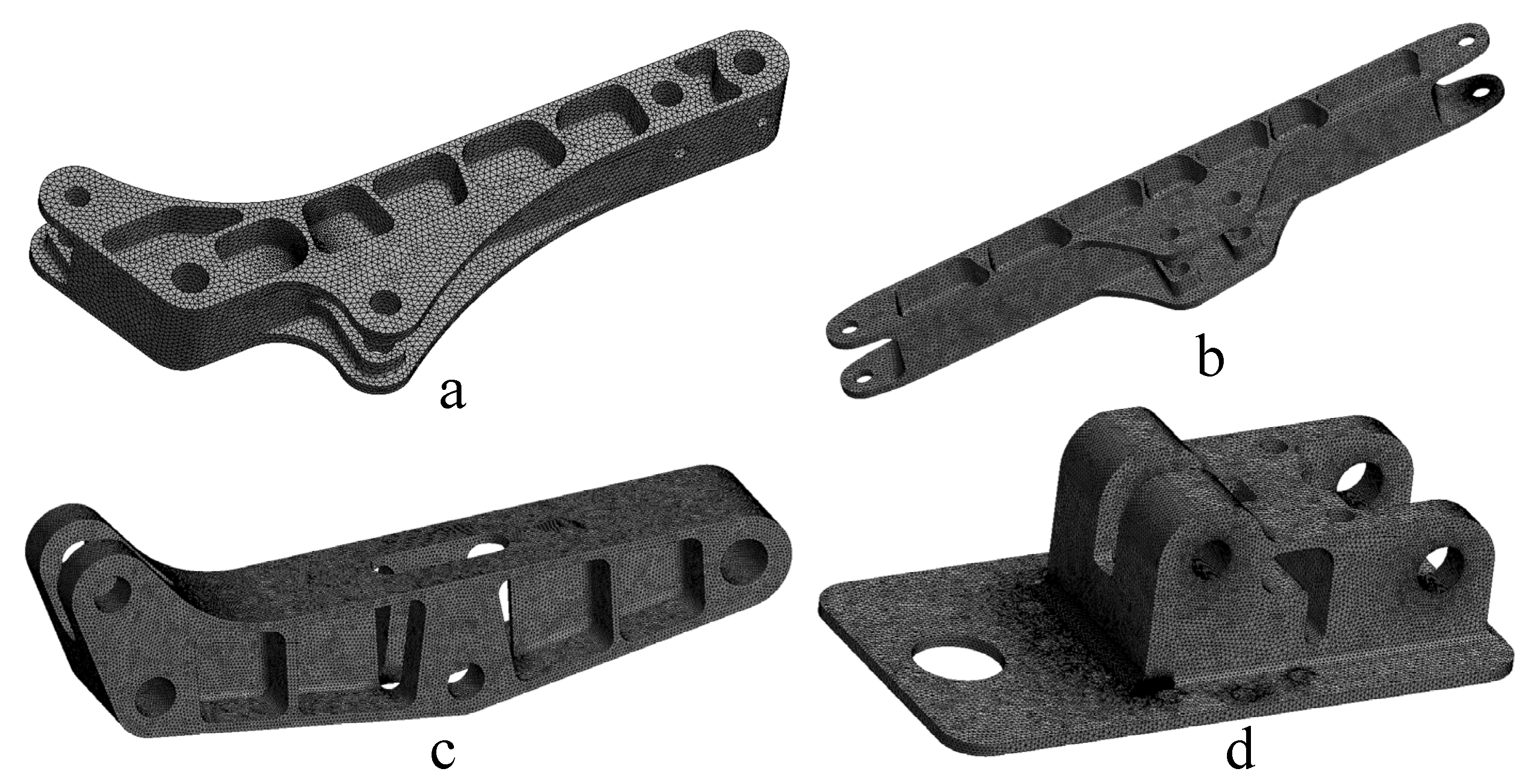
4.1. Pre-Processing of Robot Arm Finite Element Model
- (1)
- Add reasonable restraint: The robot arm near the base member can be regarded as the fixed end, and near the end apparatus as the free end. Using the fixture function, a fixed hinge constraint is set on the selected axis hole surface to restrict the hinge point.
- (2)
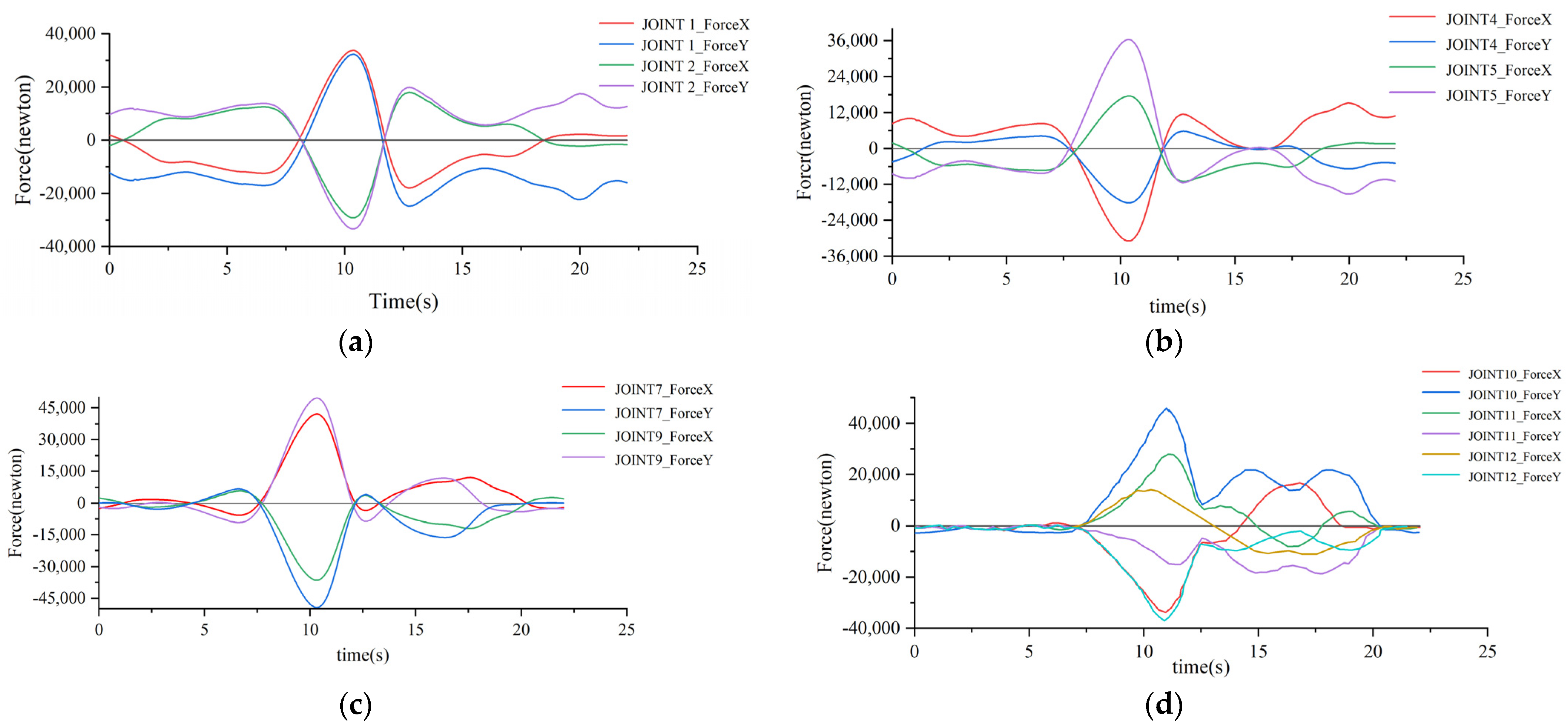
- Applying load: Therefore, the bearing load is added to the pin hole at the free end. When assigning the load size, considering that each hole has two bearing surfaces, half of the combined force obtained from the motion simulation should be added to each bearing surface. Since the force at the hinge point is not constant, but fluctuates according to a certain rule, according to engineering experience, the fluctuation is in line with the parabolic distribution, so the distribution of load is more compounded with the actual working condition by choosing parabolic distribution. The mesh parameters for each component are shown in Table 4.
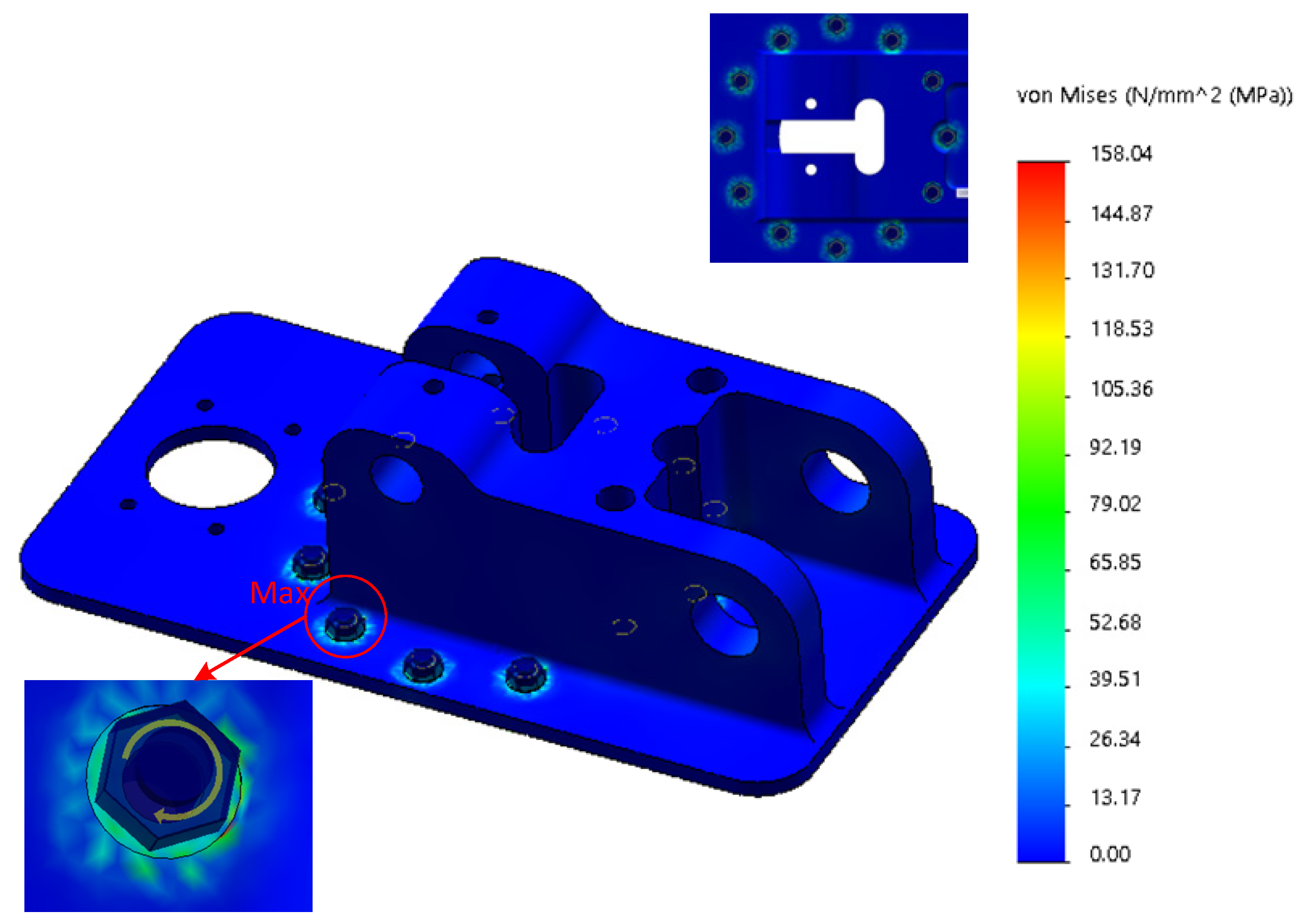
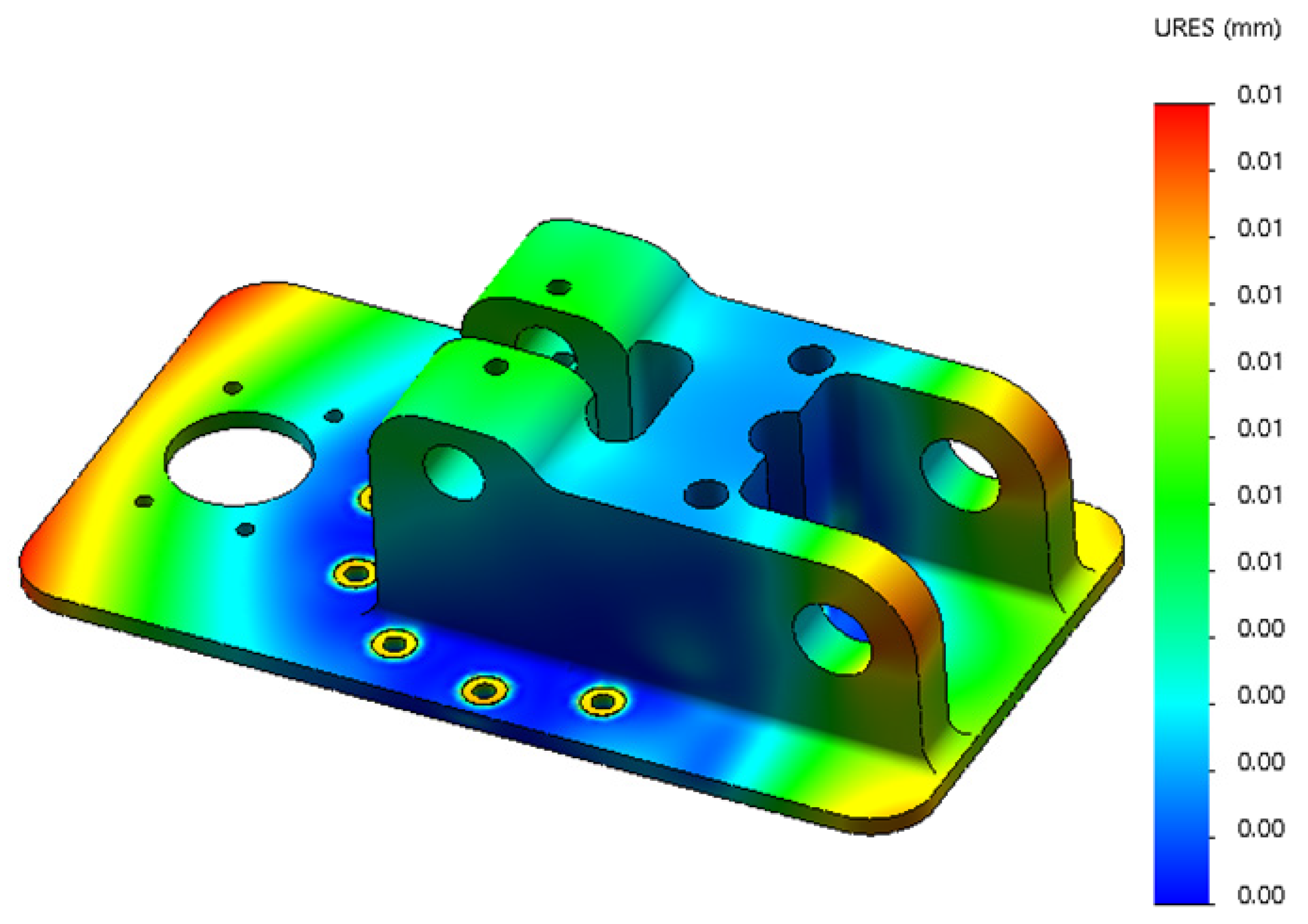
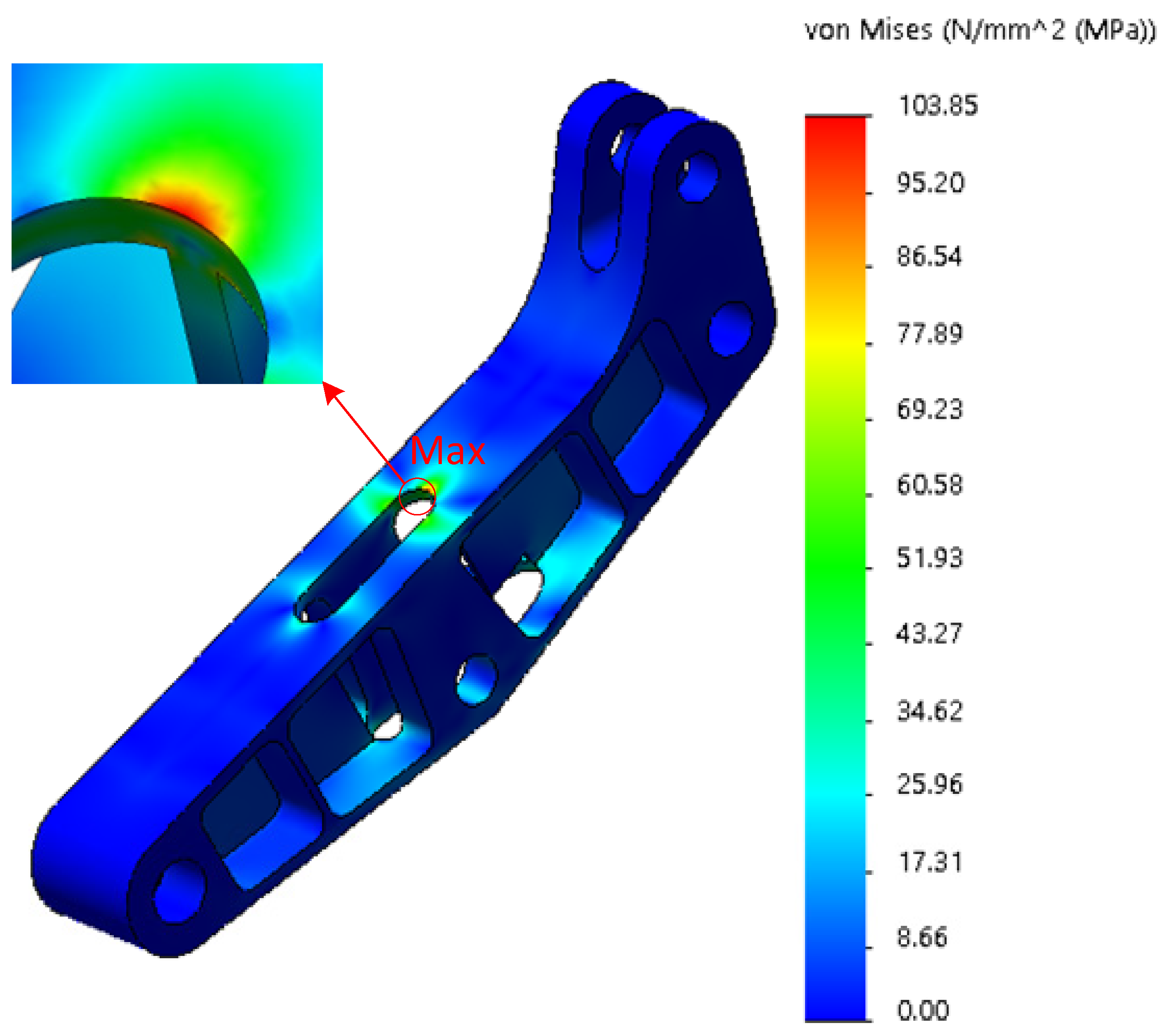
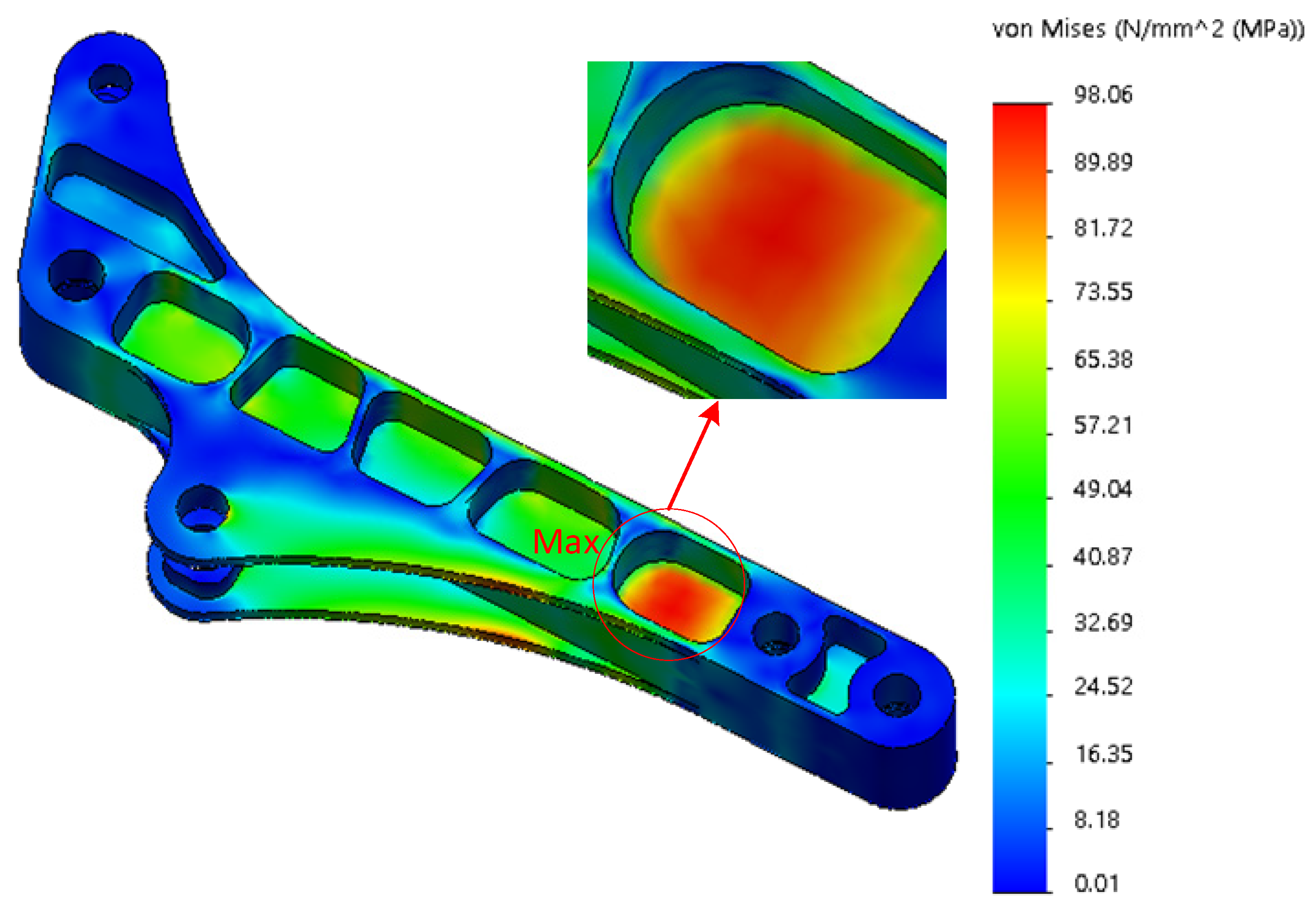
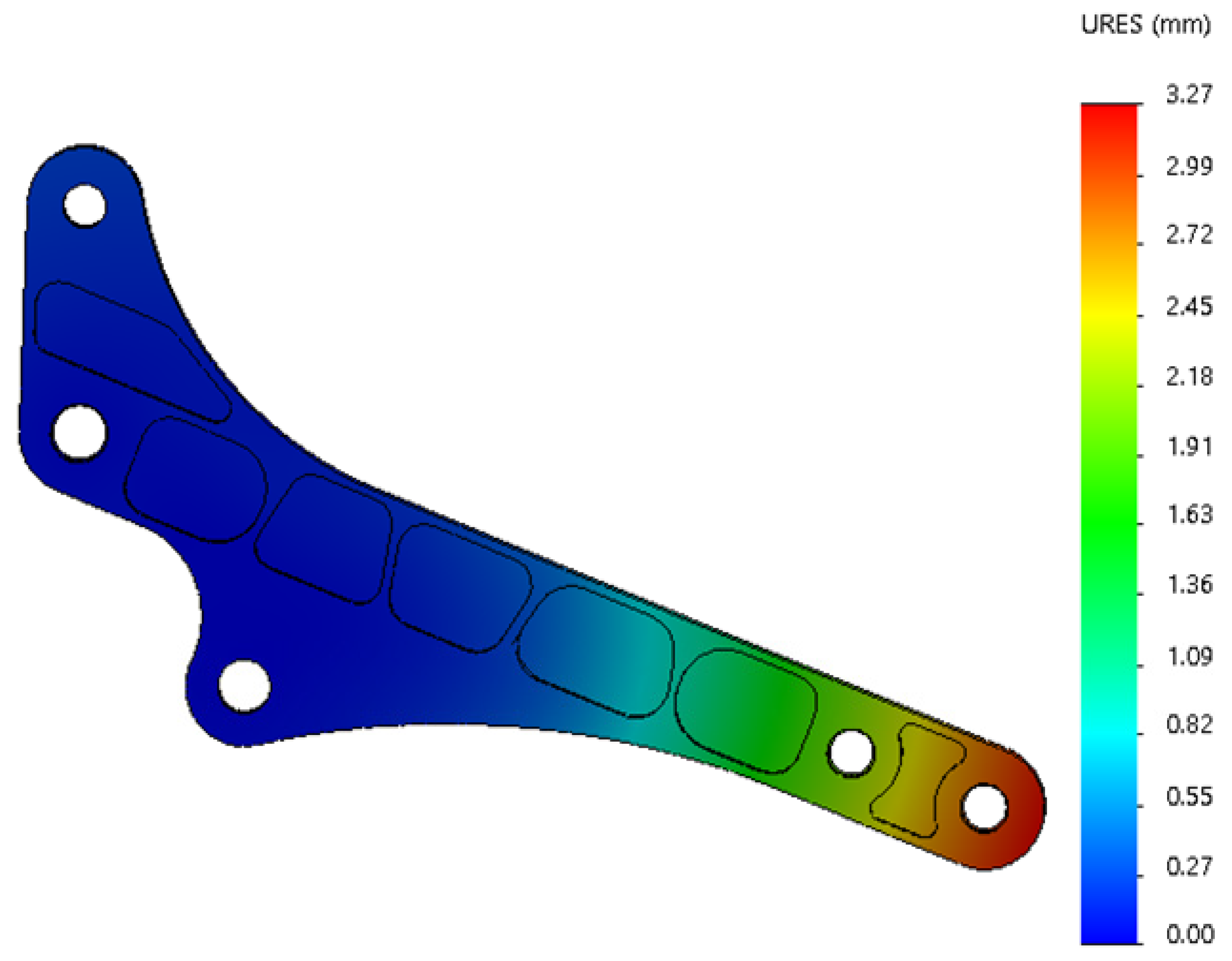
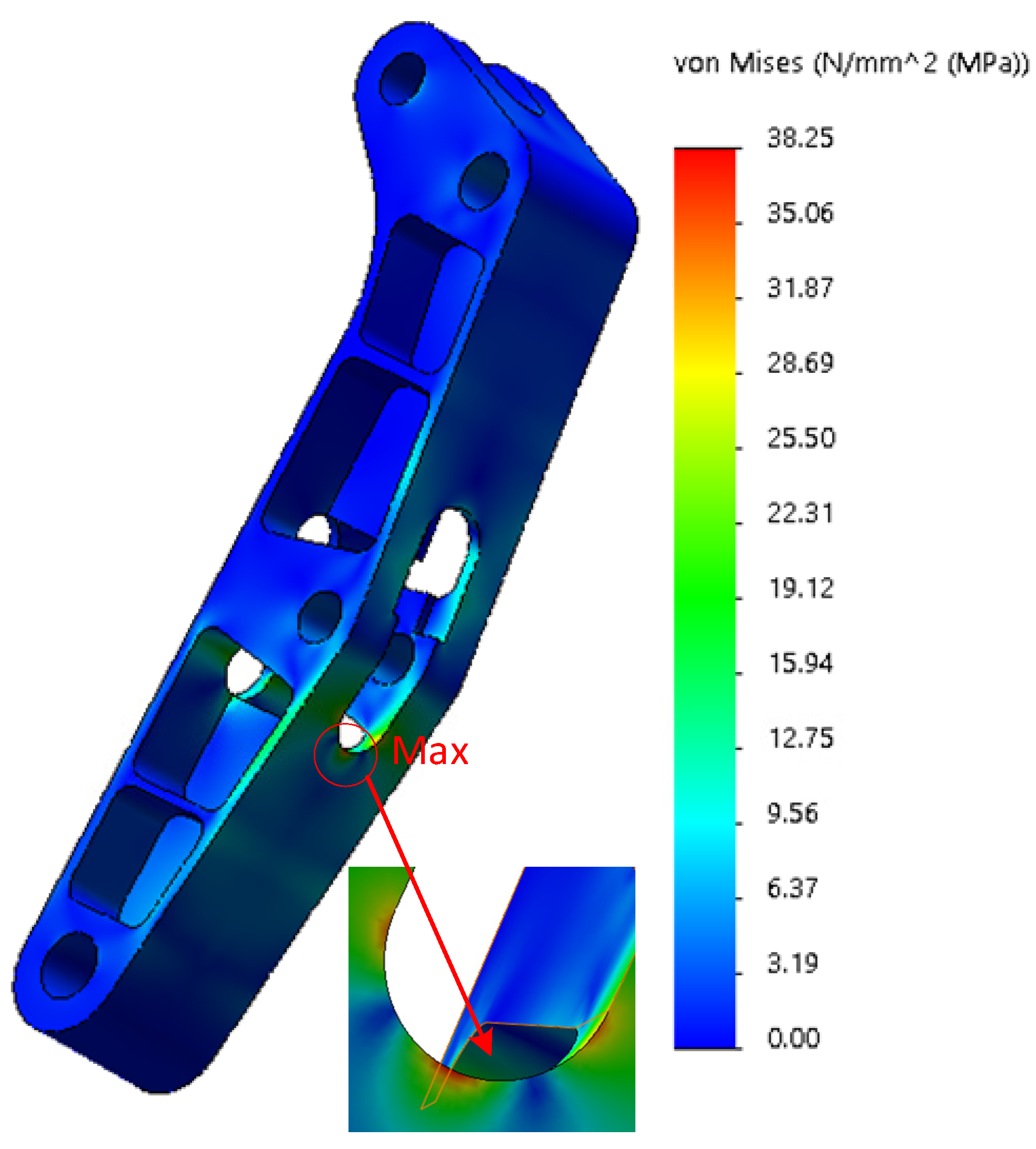
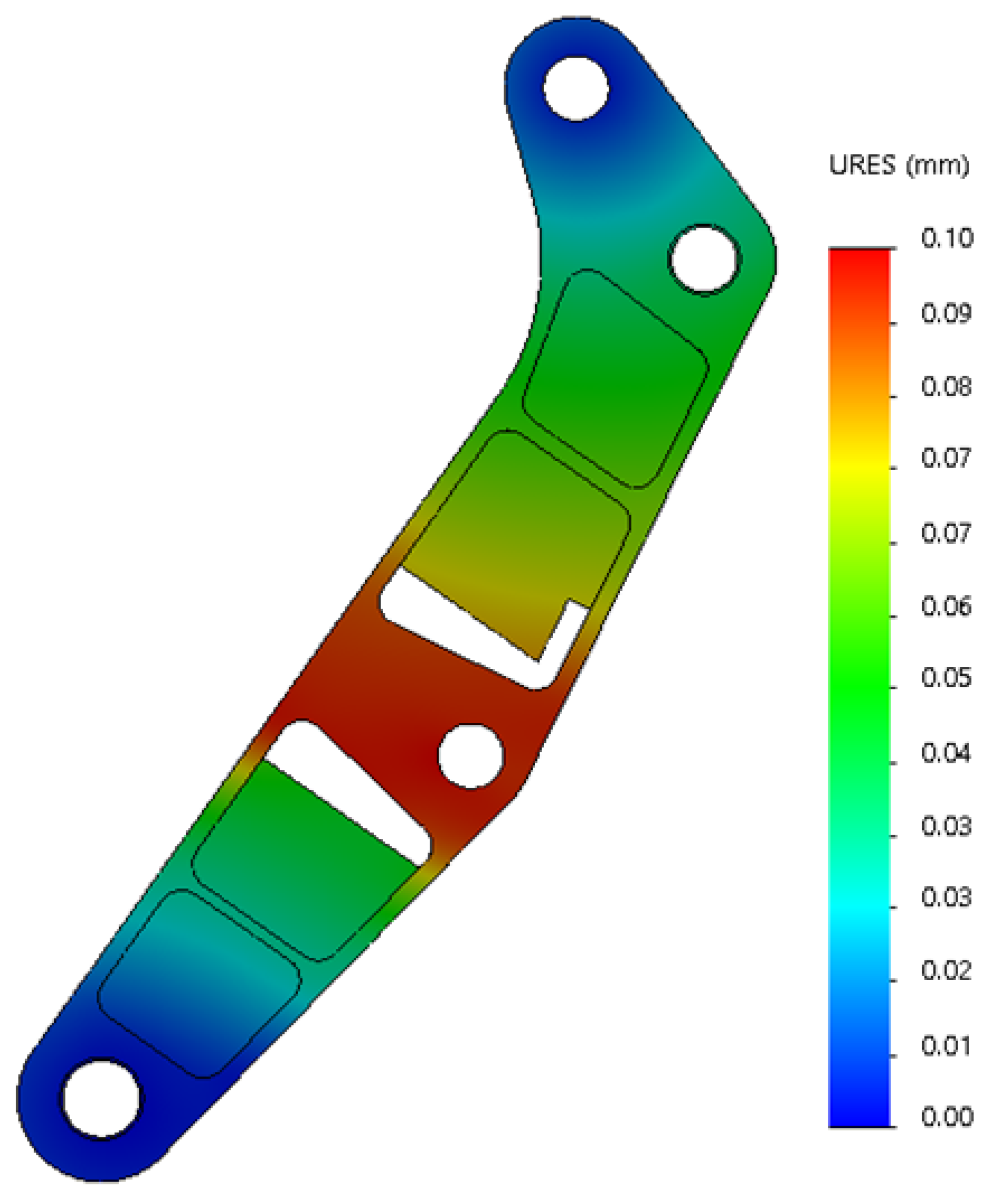
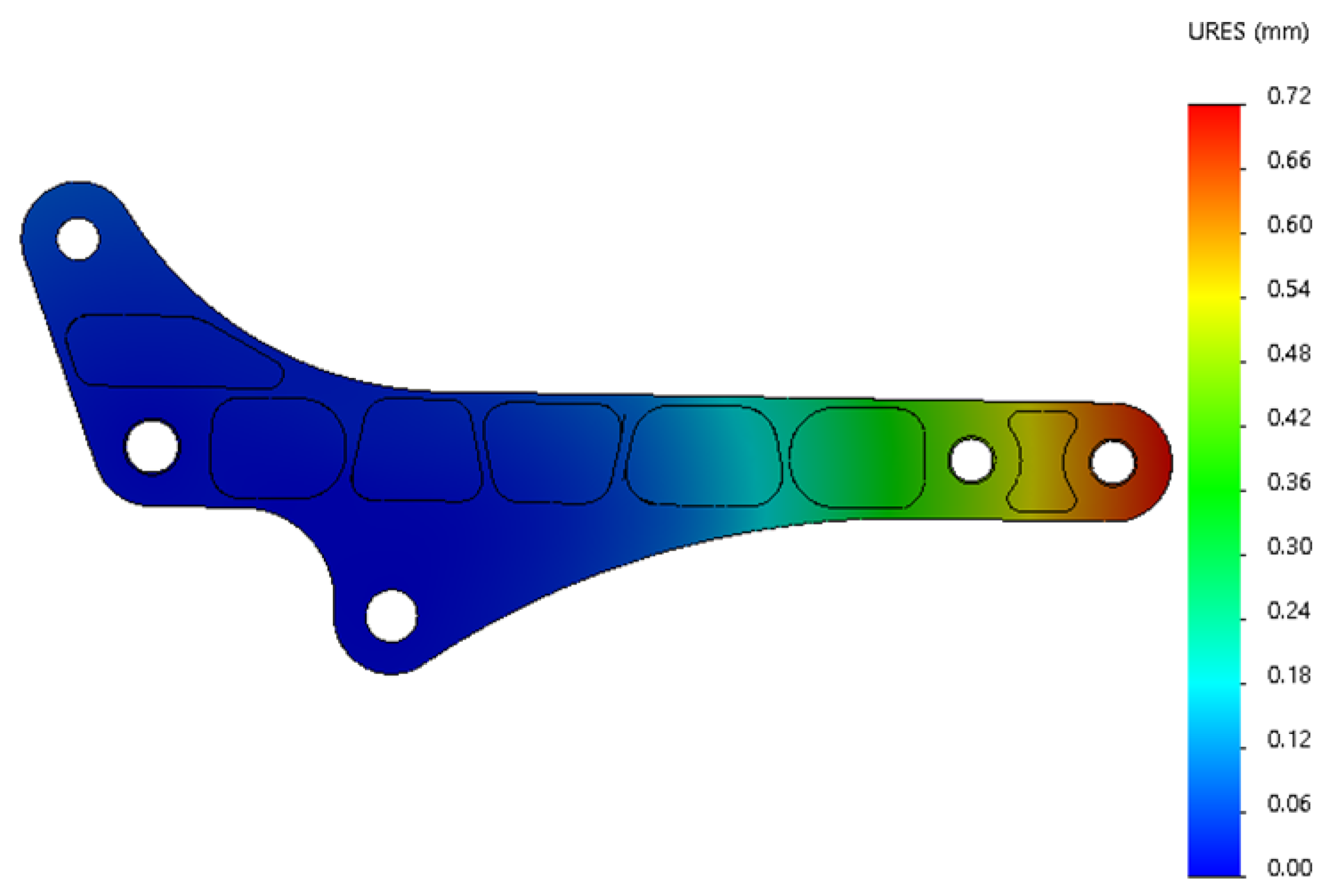
4.2. Results of the Static Analysis of the Robot Arm under Excavation Conditions
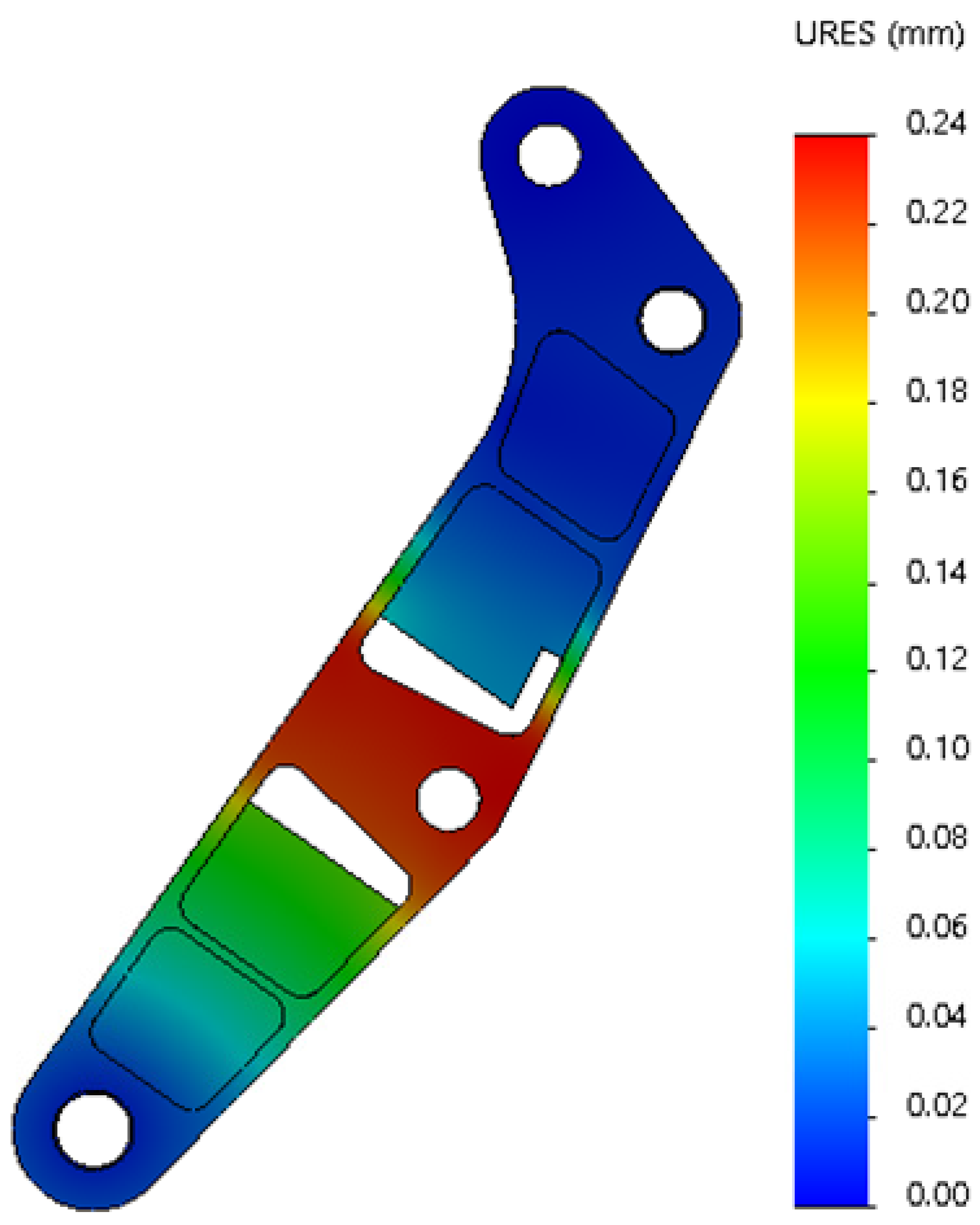
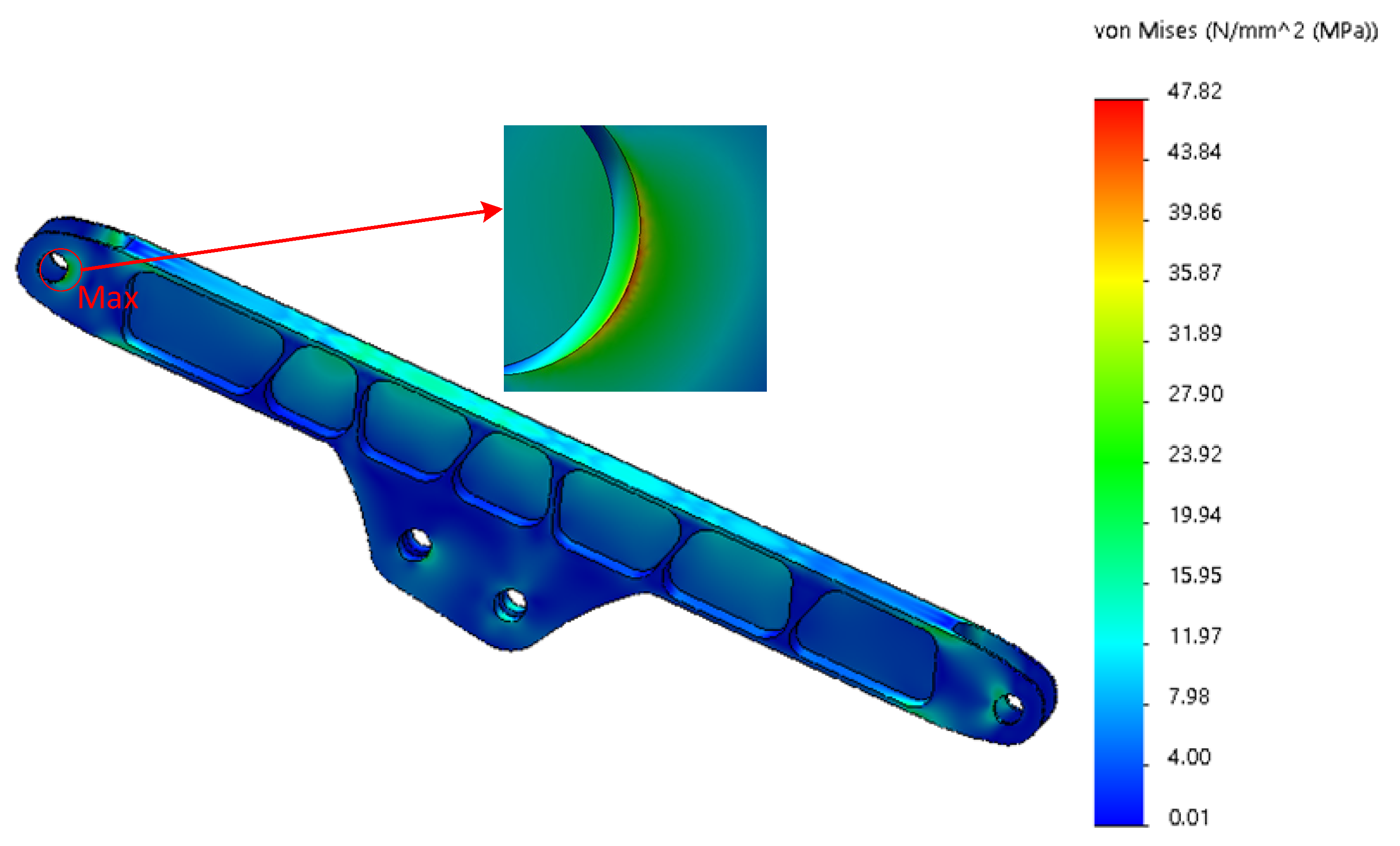
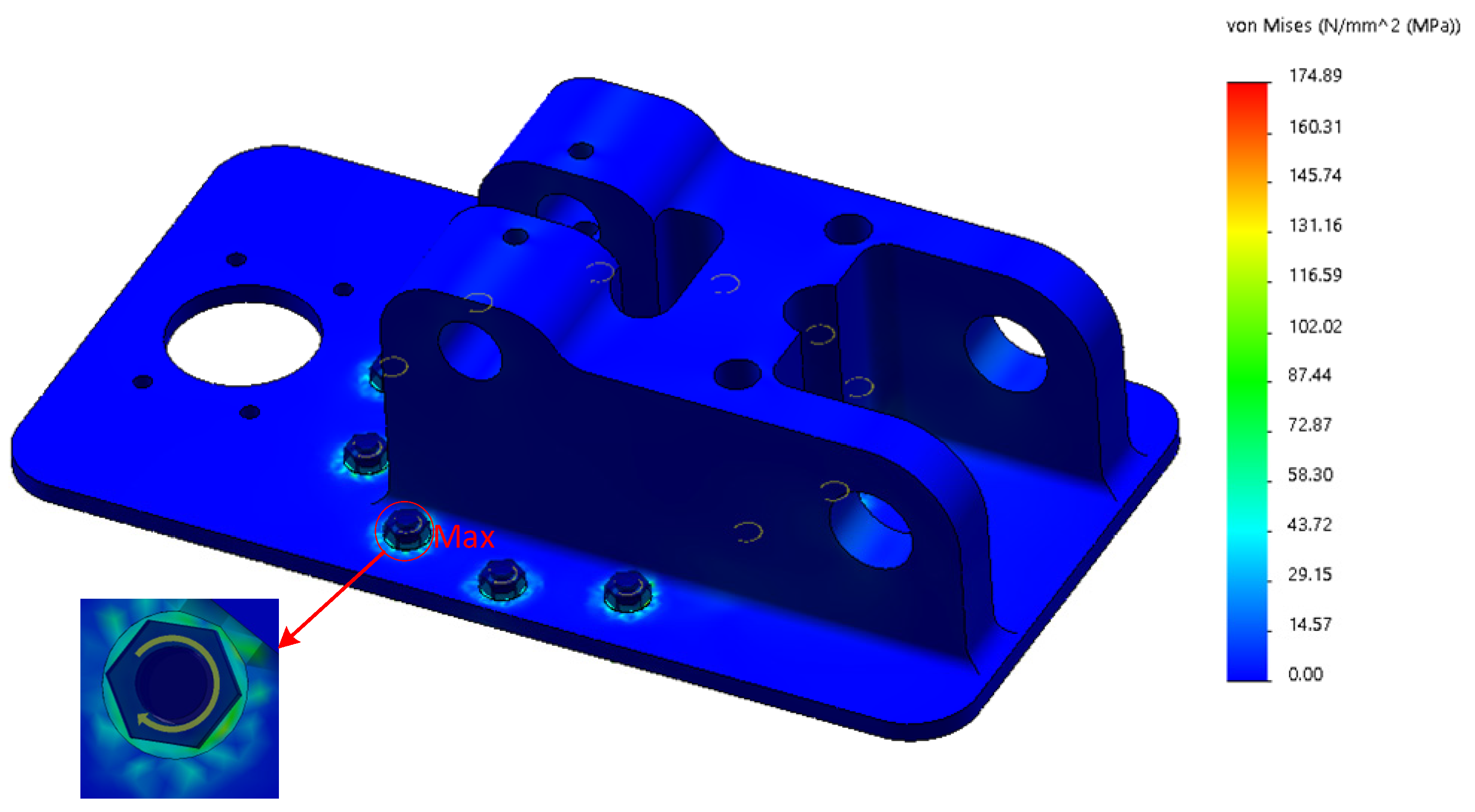
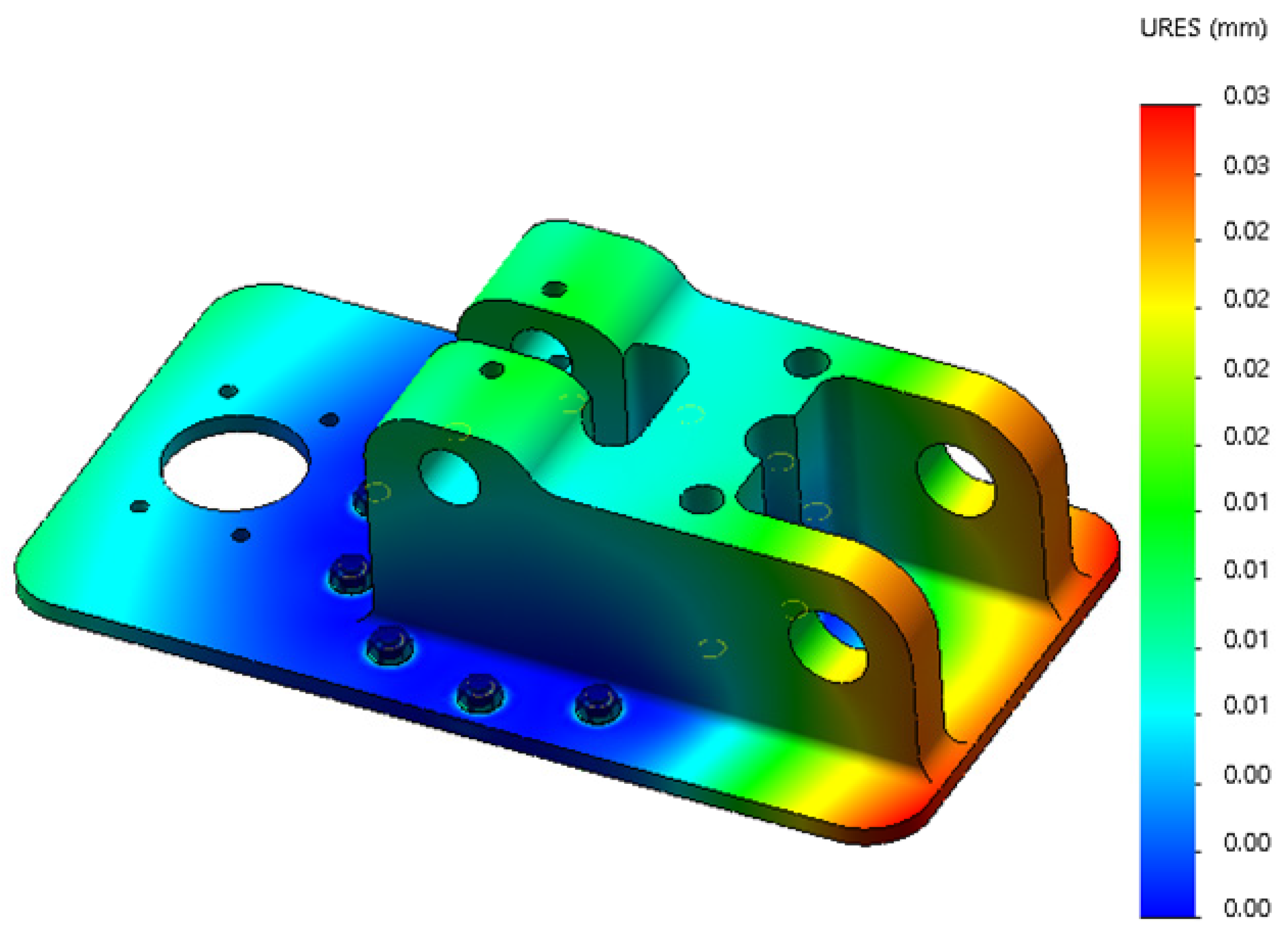
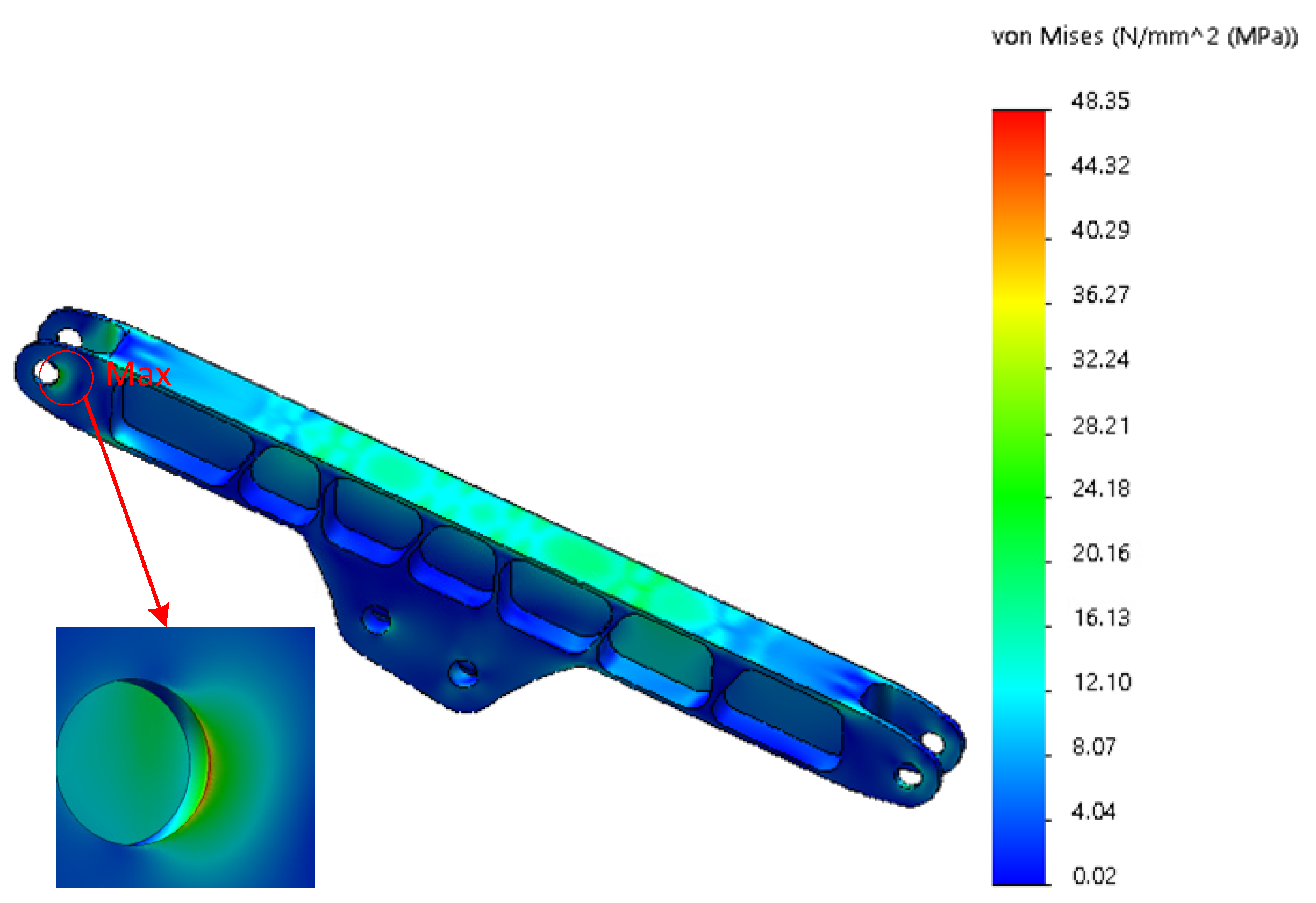
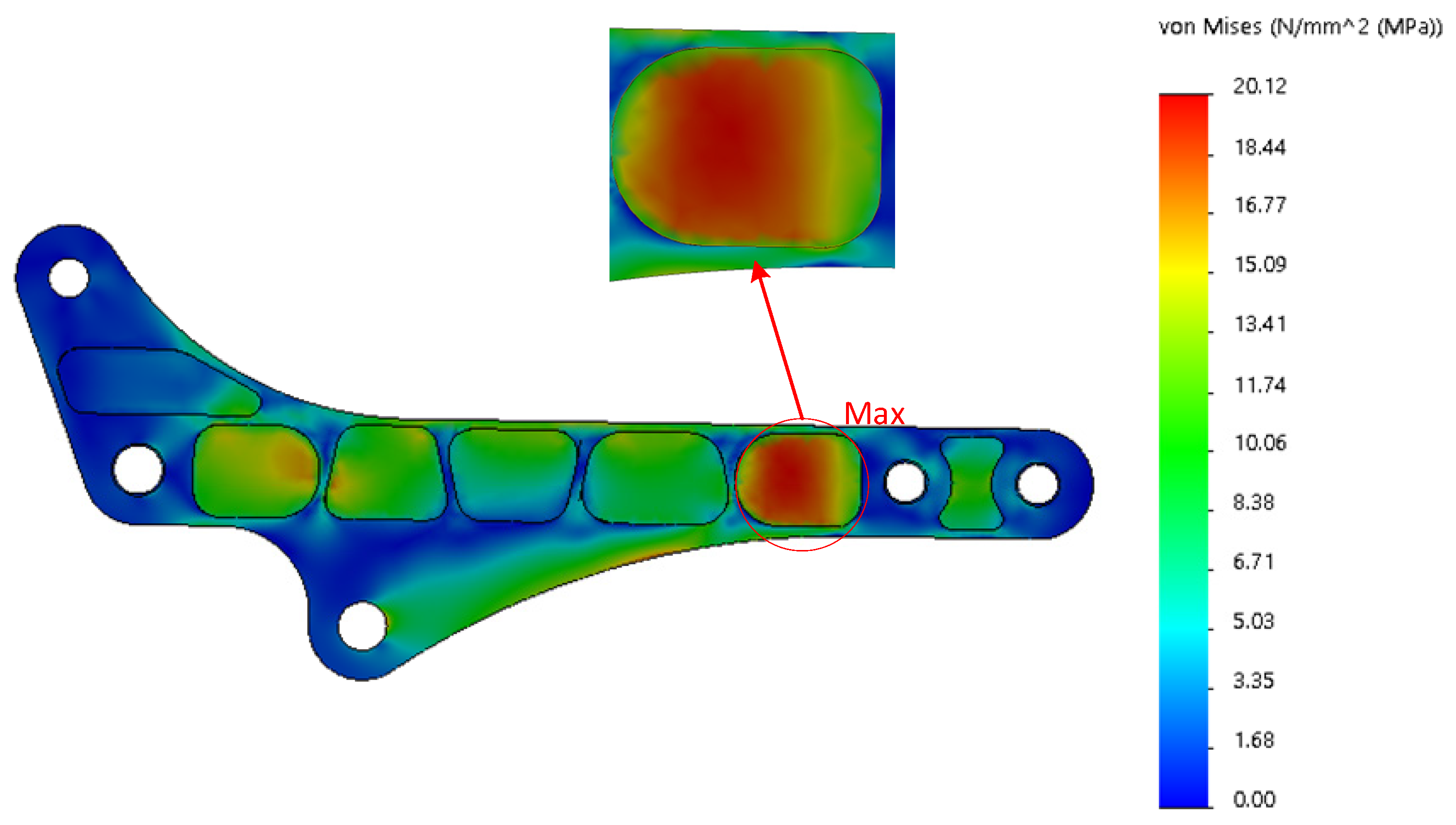
4.3. Results of the Static Analysis of the Robot Arm under Handling Conditions
5. Prototype and Analysis of Hydraulic Machinery Arm
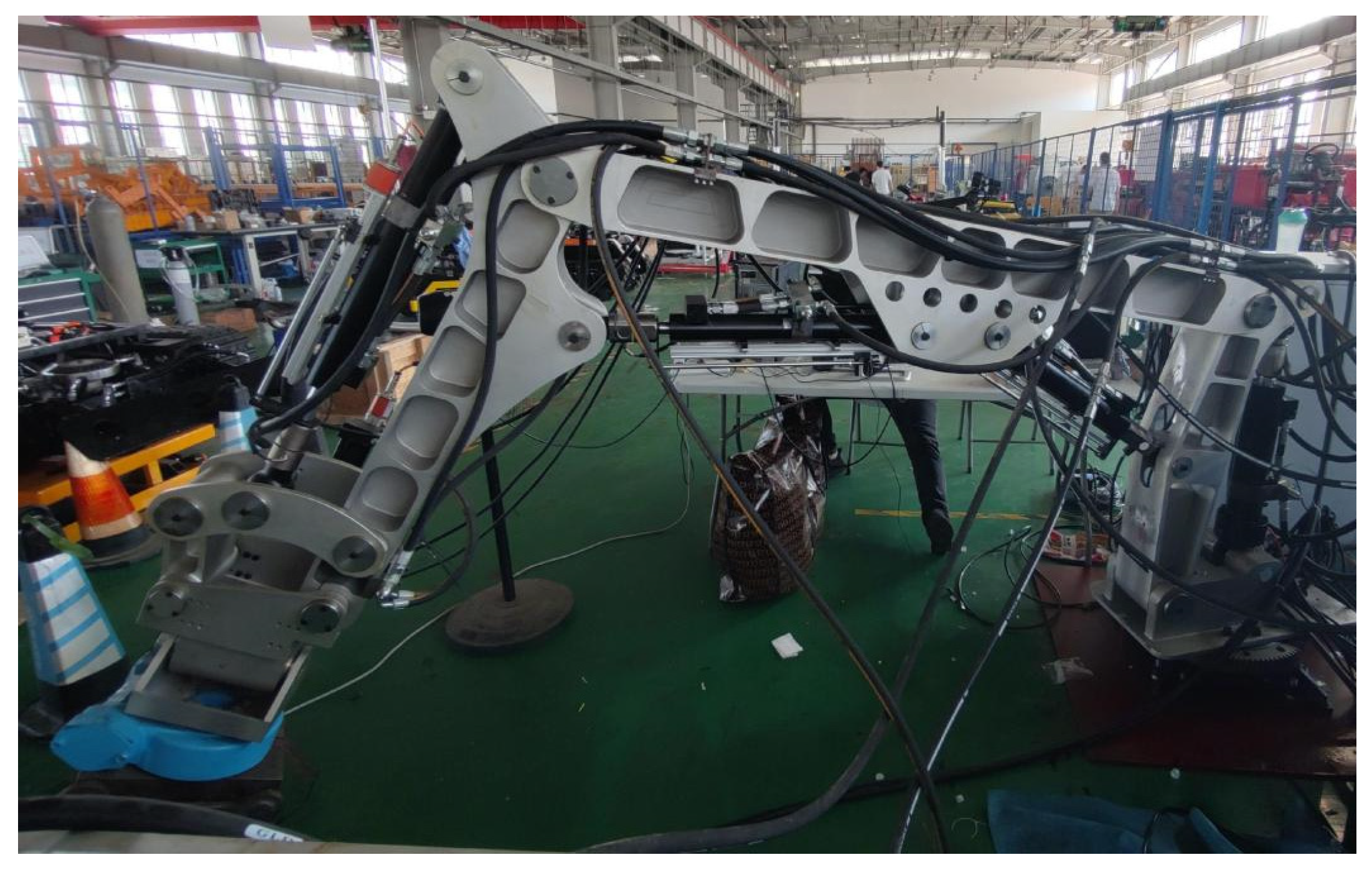
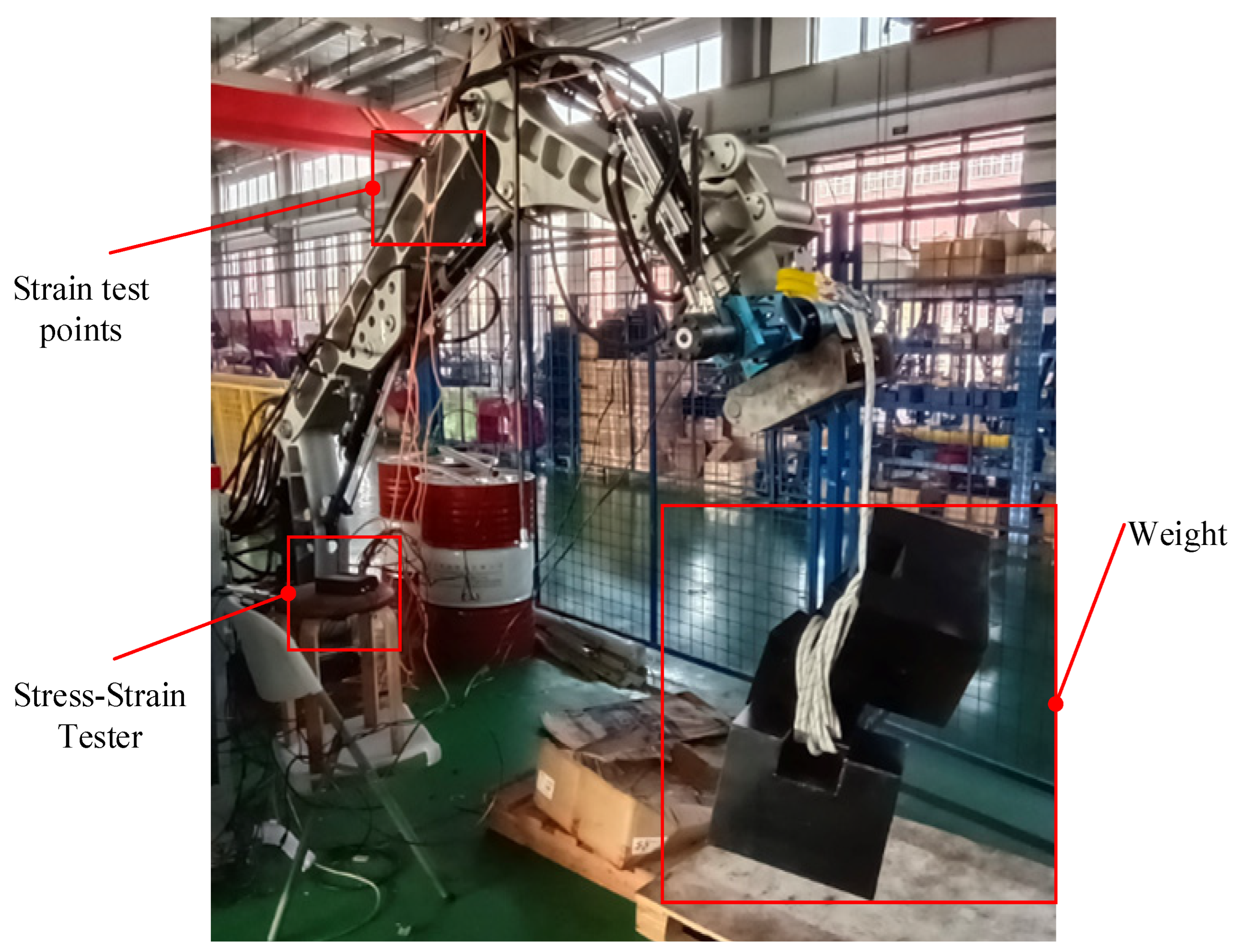
5.1. Prototype
5.2. Finite Element Experiments
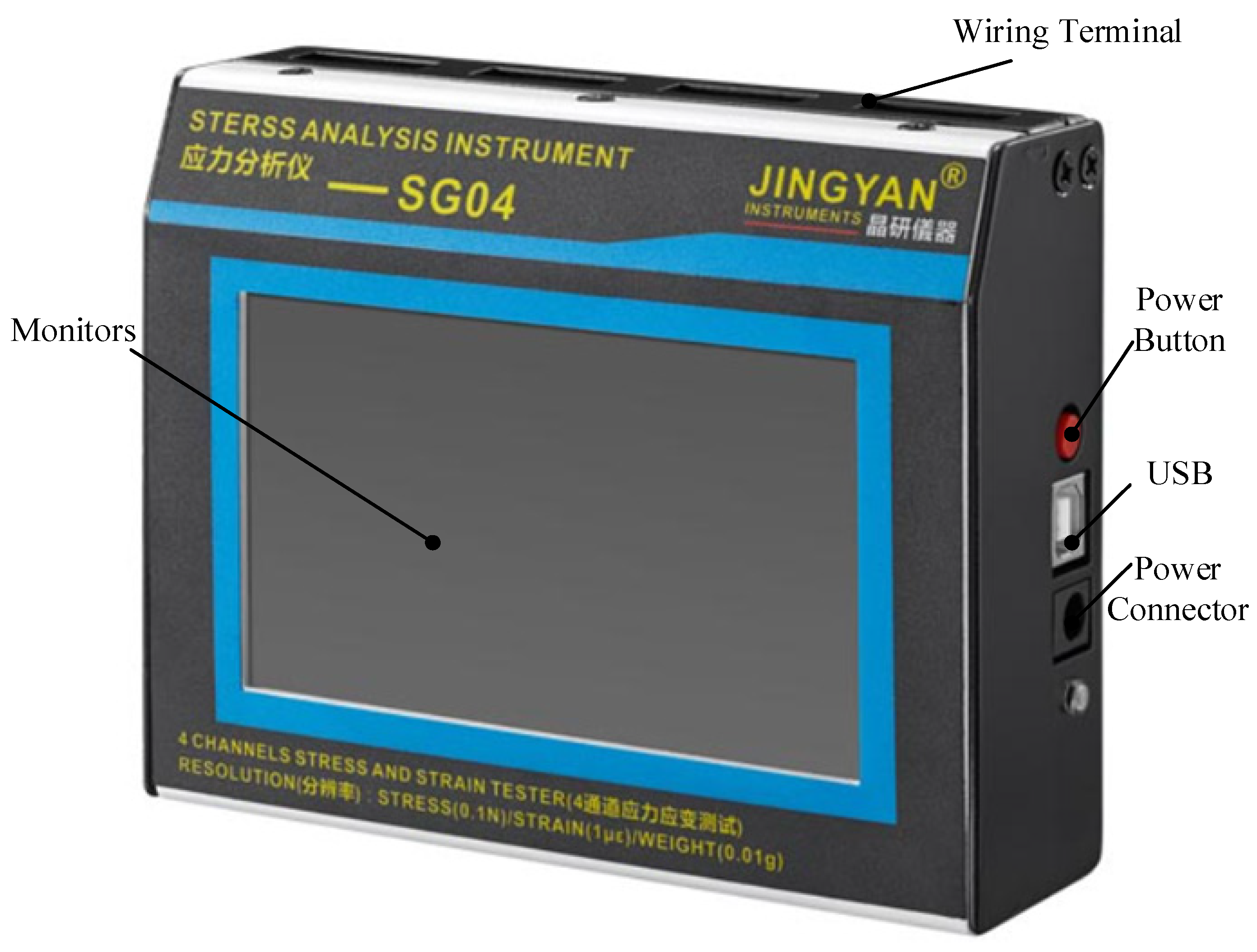
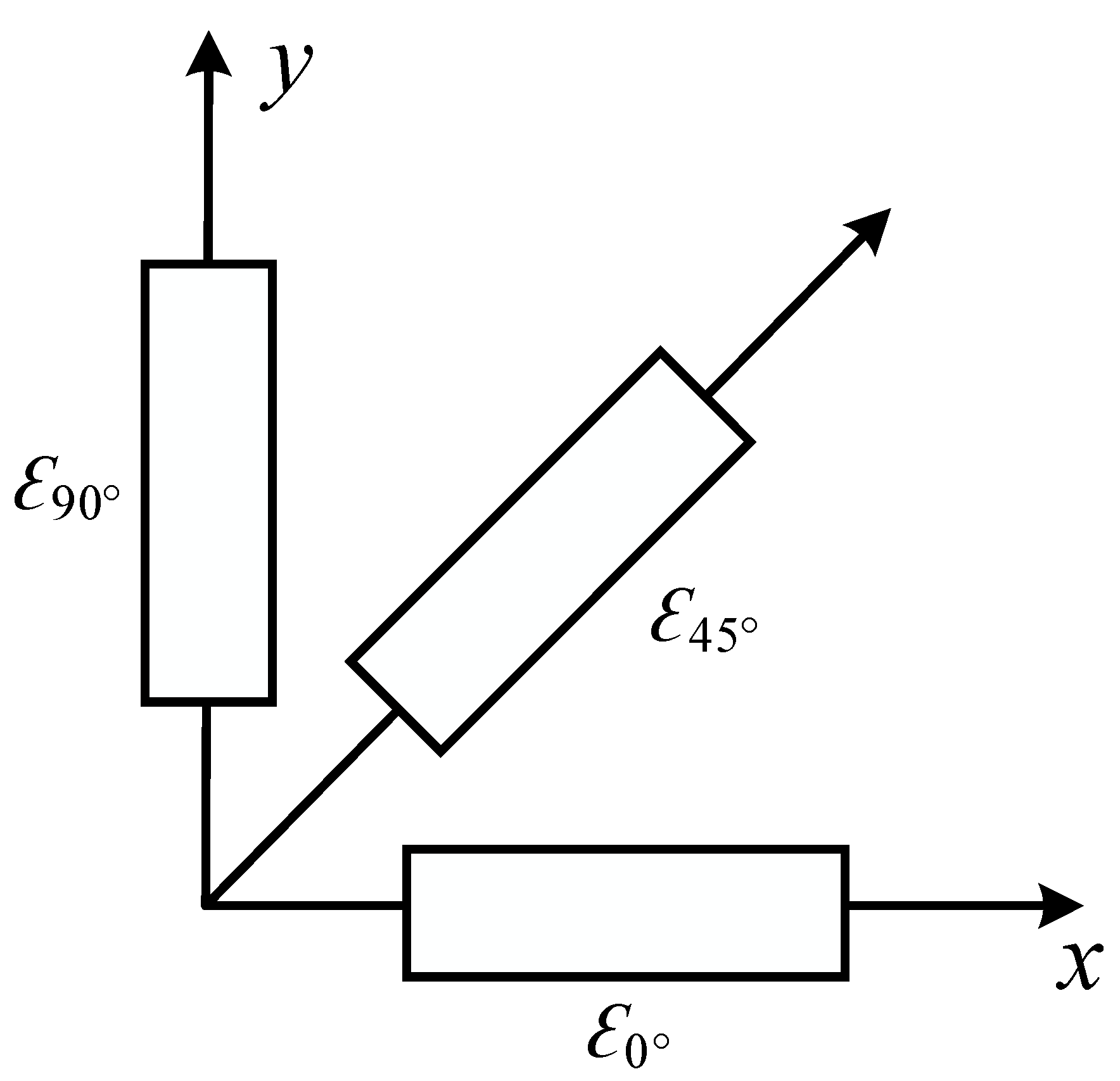
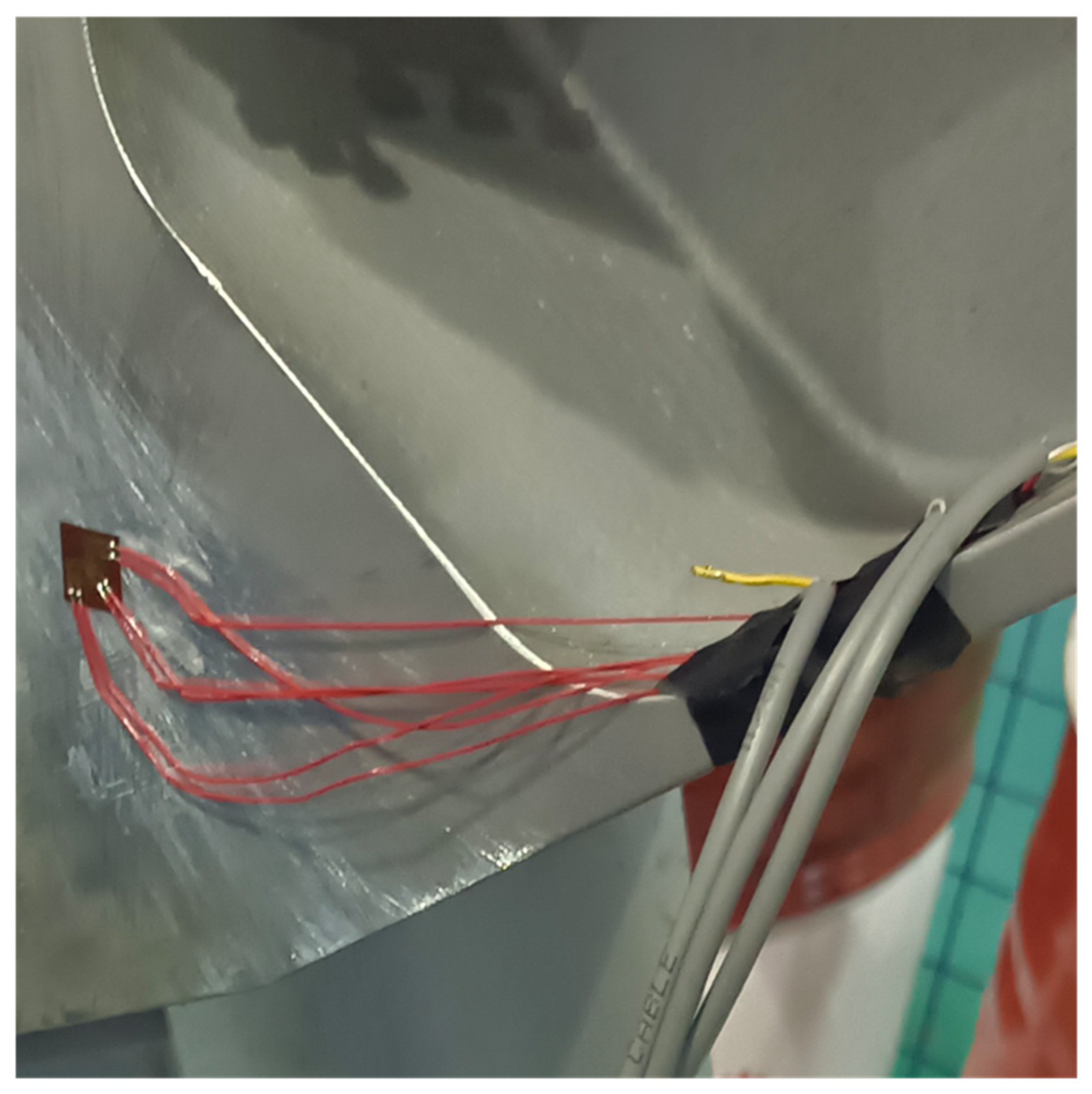
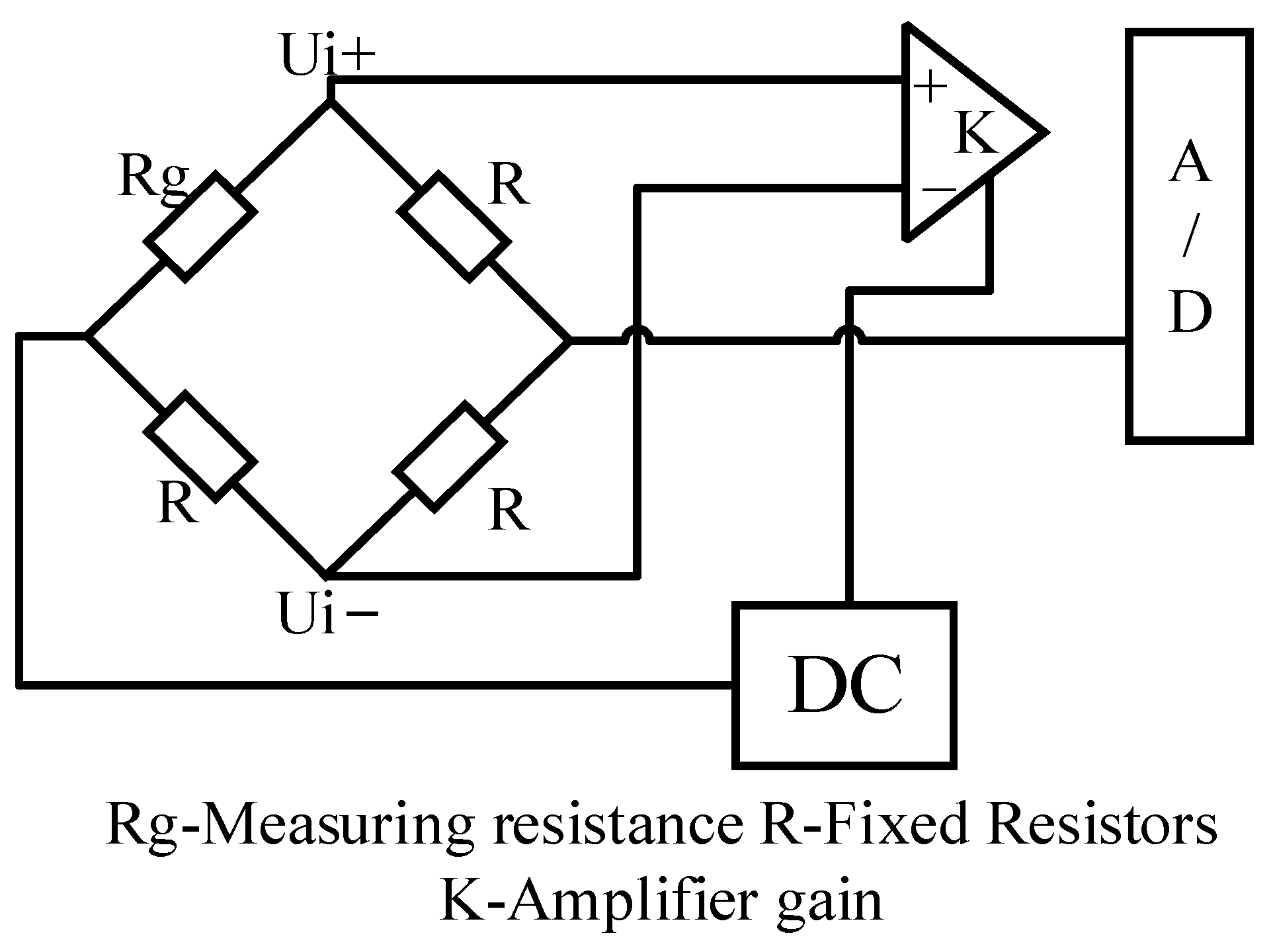
5.2.1. Preliminary Preparation of the Experiment
5.2.2. Results and Analysis of the Experiment
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
References
- Takahashi, T.; Tadakuma, K.; Watanabe, M.; Takane, E.; Hookabe, N.; Kajiahara, H.; Yamasaki, T.; Konyo, M.; Tadokoro, S. Eversion Robotic Mechanism With Hydraulic Skeletonto Realize Steering Function. IEEE Robot. Autom. Lett. 2021, 6, 5413–5420. [Google Scholar] [CrossRef]
- Han, S.; Chon, S.; Kim, J.; Seo, J.; Shin, D.G.; Park, S.; Kim, J.T.; Kim, J.; Jin, M.; Cho, J. Snake Robot Gripper Module for Search and Rescue in Narrow Spaces. IEEE Robot. Autom. Lett. 2022, 7, 1667–1673. [Google Scholar] [CrossRef]
- Hagiwara, T.; Katou, Y. Trial Production of a Small Snake Type Robot That Can Be Mounted on a Disaster Rescue Robot. In Proceedings of the 2021 18th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 19–22 May 2021; pp. 1104–1107. [Google Scholar]
- Yuan, J.; Wang, Z.; Zhang, Z.; Xing, Y.; Ji, A. Mechanism Design of a Transformable Crawling Robot and Feasibility Analysis for the Unstructured Environment. Actuators 2022, 11, 60. [Google Scholar] [CrossRef]
- Voyles, R.M.; Larson, A.C. TerminatorBot: A Novel Robot With Dual-Use Mechanism for Locomotion and Manipulation. IEEE/ASME Trans. Mechatron. 2005, 10, 17–25. [Google Scholar] [CrossRef]
- Cruz Ulloa, C.; Domínguez, D.; Del Cerro, J.; Barrientos, A. A Mixed-Reality Tele-Operation Method for High-Level Control of a Legged-Manipulator Robot. Sensors 2022, 22, 8146. [Google Scholar] [CrossRef]
- Bai, L.; Li, X.; Sun, Y.; Zheng, J.; Chen, X. A Wheel-Legged Mobile Robot with Adjustable Body Length for Rescue and Search. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 340–345. [Google Scholar]
- Wang, R.; Chen, Z.; Xu, K.; Wang, S.; Wang, J.; Li, B. Hybrid Obstacle-Surmounting Gait for Hexapod Wheel-Legged Robot in Special Terrain. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 1–6. [Google Scholar]
- Lee, D.-H.; Huynh, T.; Kim, Y.-B.; Soumayya, C. Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators. Actuators 2021, 10, 275. [Google Scholar] [CrossRef]
- Liu, H.; Ge, J.; Wang, Y.; Li, J.; Ding, K.; Zhang, Z.; Guo, Z.; Li, W.; Lan, J. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method. Actuators 2021, 11, 4. [Google Scholar] [CrossRef]
- Focchi, M.; Bensaadallah, M.; Frego, M.; Peer, A.; Fontanelli, D.; Del Prete, A.; Palopoli, L. CLIO: A Novel Robotic Solution for Exploration and Rescue Missions in Hostile Mountain Environments. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 7742–7748. [Google Scholar]
- Ye, C.; Su, Y.; Yu, S.; Wang, Y. Development of a Deformable Water-Mobile Robot. Actuators 2023, 12, 202. [Google Scholar] [CrossRef]
- Yuguchi, Y.; Satoh, Y. Development of a Robotic System for Nuclear Facility Emergency Preparedness—Observing and Work-Assisting Robot System. Adv. Robot. 2002, 16, 481–484. [Google Scholar] [CrossRef]
- Nishida, T.; Koga, H.; Fuchikawa, Y.; Kitayama, Y.; Kurogil, S.; Arimura, Y. Development of Pilot Assistance System with Stereo Vision for Robot Manipulation. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Republic of Korea, 18–21 October 2006. [Google Scholar]
- Wolf, A.; Brown, H.B.; Casciola, R.; Costa, A.; Schwerin, M.; Shamas, E.; Choset, H. A Mobile Hyper Redundant Mechanism for Search and Rescue Tasks. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2889–2895. [Google Scholar]
- Liang, X.; Wan, Y.; Zhang, C.; Kou, Y.; Xin, Q.; Yi, W. Robust Position Control of Hydraulic Manipulators Using Time Delay Estimation and Nonsingular Fast Terminal Sliding Mode. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 50–61. [Google Scholar] [CrossRef]
- Zhou, L.; Bai, S. A New Approach to Design of a Lightweight Anthropomorphic Arm for Service Applications. J. Mech. Robot. 2015, 7, 031001. [Google Scholar] [CrossRef]
- Li, Z.; Milutinović, D.; Rosen, J. Design of a Multi-Arm Surgical Robotic System for Dexterous Manipulation. J. Mech. Robot. 2016, 8, 061017. [Google Scholar] [CrossRef]
- Dämmer, G.; Gablenz, S.; Neumann, R.; Major, Z. Design, Topology Optimization, and Additive Manufacturing of a Pneumatically Actuated Lightweight Robot. Actuators 2023, 12, 266. [Google Scholar] [CrossRef]
- Wu, Z.; Jiang, T. Property Analysis and Structure Optimization of Robotic Arm Based on Pro/E and ANSYS. J. Chang. Univ. Sci. Technol. (Nat. Sci. Ed.) 2011, 34, 3. [Google Scholar] [CrossRef]
- Li, K.; Huo, Y.; Liu, Y.; Shi, Y.; He, Z.; Cui, Y. Design of a Lightweight Robotic Arm for Kiwifruit Pollination. Comput. Electron. Agric. 2022, 198, 107114. [Google Scholar] [CrossRef]
- Evans, A.G. Lightweight Materials and Structures. MRS Bull. 2001, 26, 790–797. [Google Scholar] [CrossRef]
- Yeo, S.J.; Oh, M.J.; Yoo, P.J. Structurally Controlled Cellular Architectures for High-Performance Ultra-Lightweight Materials. Adv. Mater. 2019, 31, 1803670. [Google Scholar] [CrossRef]
- Sun, Q.; Zhou, G.; Meng, Z.; Jain, M.; Su, X. An Integrated Computational Materials Engineering Framework to Analyze the Failure Behaviors of Carbon Fiber Reinforced Polymer Composites for Lightweight Vehicle Applications. Compos. Sci. Technol. 2021, 202, 108560. [Google Scholar] [CrossRef]
- Tam, K.-M.M.; Marshall, D.J.; Gu, M.; Kim, J.; Huang, Y.; Lavallee, J.; Mueller, C.T. Fabrication-Aware Structural Optimisation of Lattice Additive-Manufactured with Robot-Arm. Int. J. Rapid Manuf. 2018, 7, 120–168. [Google Scholar] [CrossRef]
- Salvati, E.; Korsunsky, A.M. Micro-Scale Measurement & FEM Modelling of Residual Stresses in AA6082-T6 Al Alloy Generated by Wire EDM Cutting. J. Mater. Process. Technol. 2020, 275, 116373. [Google Scholar] [CrossRef]
- Yanhui, Y.; Dong, L.; Ziyan, H.; Zijian, L. Optimization of Preform Shapes by RSM and FEM to Improve Deformation Homogeneity in Aerospace Forgings. Chin. J. Aeronaut. 2010, 23, 260–267. [Google Scholar] [CrossRef]
- Liu, J.; Ma, Y. A Survey of Manufacturing Oriented Topology Optimization Methods. Adv. Eng. Softw. 2016, 100, 161–175. [Google Scholar] [CrossRef]
- Mantovani, S.; Presti, I.L.; Cavazzoni, L.; Baldini, A. Influence of Manufacturing Constraints on the Topology Optimization of an Automotive Dashboard. Procedia Manuf. 2017, 11, 1700–1708. [Google Scholar] [CrossRef]
- Zuo, K.-T.; Chen, L.-P.; Zhang, Y.-Q.; Yang, J. Manufacturing- and Machining-Based Topology Optimization. Int. J. Adv. Manuf. Technol. 2006, 27, 531–536. [Google Scholar] [CrossRef]
- Rout, B.K.; Mittal, R.K. Optimal Design of Manipulator Parameter Using Evolutionary Optimization Techniques. Robotica 2010, 28, 381–395. [Google Scholar] [CrossRef]
- Liu, W.; Zhu, H.; Wang, Y.; Zhou, S.; Bai, Y.; Zhao, C. Topology Optimization of Support Structure of Telescope Skin Based on Bit-Matrix Representation NSGA-II. Chin. J. Aeronaut. 2013, 26, 1422–1429. [Google Scholar] [CrossRef]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Indicators | Parameters |
|---|---|
| Number of degrees of freedom | 7 |
| Weight | 500 kg |
| Working radius | 4 m |
| Maximum load capacity | 300 kg |
| Power type | Hydraulic |
| Drivers | Motion Functions |
|---|---|
| The first arm hydraulic cylinder driver | |
| The second arm hydraulic cylinder driver | |
| The third arm hydraulic cylinder driver | |
| Rotary hammer hydraulic cylinder driver | |
| Tangential resistance | |
| Normal resistance | |
| Lifting resistance |
| Drivers | Motion Functions |
|---|---|
| The first arm hydraulic cylinder driver | |
| The second arm hydraulic cylinder driver | |
| The third arm hydraulic cylinder driver | |
| Rotary hammer hydraulic cylinder driver |
| Component | Number of Nodes | Number of Cells | Aspect Ratio < 3 (%) | Flexure Unit (%) |
|---|---|---|---|---|
| Base | 415,702 | 275,829 | 99.4 | 0 |
| The first arm | 453,166 | 296,149 | 99.5 | 0 |
| The second arm | 1,248,279 | 827,042 | 99.2 | 0 |
| The third arm | 774,436 | 510,797 | 99.1 | 0 |
| The First Arm Cylinder (mm) | The Second Arm Cylinder (mm) | The Third Arm Cylinder (mm) | Rotary Hammer Cylinder (mm) |
|---|---|---|---|
| 20 | 335 | 60 | 142 |
| Measurement Points | Experimental Value (MPa) | Simulation Value (MPa) | Absolute Error (MPa) |
|---|---|---|---|
| 1 | 0.461 | 0.150 | 0.311 |
| 2 | 1.315 | 0.322 | 0.993 |
| 3 | 2.357 | 3.892 | 1.535 |
| 4 | 5.333 | 3.275 | 2.058 |
| 5 | 3.309 | 2.945 | 0.364 |
| 6 | 4.211 | 1.604 | 2.607 |
| 7 | 1.317 | 0.852 | 0.465 |
| 8 | 1.222 | 0.498 | 0.724 |
| 9 | 9.558 | 11.623 | 2.065 |
| 10 | 1.571 | 1.964 | 0.393 |
| 11 | 7.087 | 9.432 | 2.345 |
| 12 | 5.125 | 7.733 | 2.608 |
| 13 | 1.048 | 2.853 | 1.805 |
| 14 | 2.129 | 2.307 | 0.178 |
| 15 | 3.527 | 3.061 | 0.466 |
| 16 | 3.549 | 2.404 | 1.124 |
| 17 | 1.994 | 1.559 | 0.435 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, J.; Jiang, W.; Zhang, Q.; Zhang, W. Design and Simulation of a Seven-Degree-of-Freedom Hydraulic Robot Arm. Actuators 2023, 12, 362. https://doi.org/10.3390/act12090362
Zhong J, Jiang W, Zhang Q, Zhang W. Design and Simulation of a Seven-Degree-of-Freedom Hydraulic Robot Arm. Actuators. 2023; 12(9):362. https://doi.org/10.3390/act12090362
Chicago/Turabian StyleZhong, Jun, Wenjun Jiang, Qianzhuang Zhang, and Wenhao Zhang. 2023. "Design and Simulation of a Seven-Degree-of-Freedom Hydraulic Robot Arm" Actuators 12, no. 9: 362. https://doi.org/10.3390/act12090362
APA StyleZhong, J., Jiang, W., Zhang, Q., & Zhang, W. (2023). Design and Simulation of a Seven-Degree-of-Freedom Hydraulic Robot Arm. Actuators, 12(9), 362. https://doi.org/10.3390/act12090362