
Dynamic Modeling, Simulation, and Optimization of Vehicle Electronic Stability Program Algorithm Based on Back Propagation Neural Network and PID Algorithm



Abstract
:1. Introduction
2. Methods
2.1. Predictive Model
2.2. Simulation Model
2.3. Validation of the Simulation Model
3. PID Lateral Stability Control Algorithm
3.1. PID Algorithm Controller Model
3.2. PID Algorithm Validation Methods
4. BP Neural Network-Based PID Lateral Stability Control Algorithm
4.1. BP Neural Network-Based PID Algorithm Controller Model
| Algorithm 1: BP neural network-based PID algorithm |
| Input: Initial value of Kp, Ki, and Kd Output: New value of Kp, Ki, and Kd
|
4.2. BP Neural Network-Based PID Algorithm Validation Method
5. Results and Discussion
5.1. Simulation Results on the Effectiveness of the PID Algorithm
5.2. Simulation Results on the Effectiveness of the BP Neural Network-Based PID Algorithm
6. Conclusions
- (1)
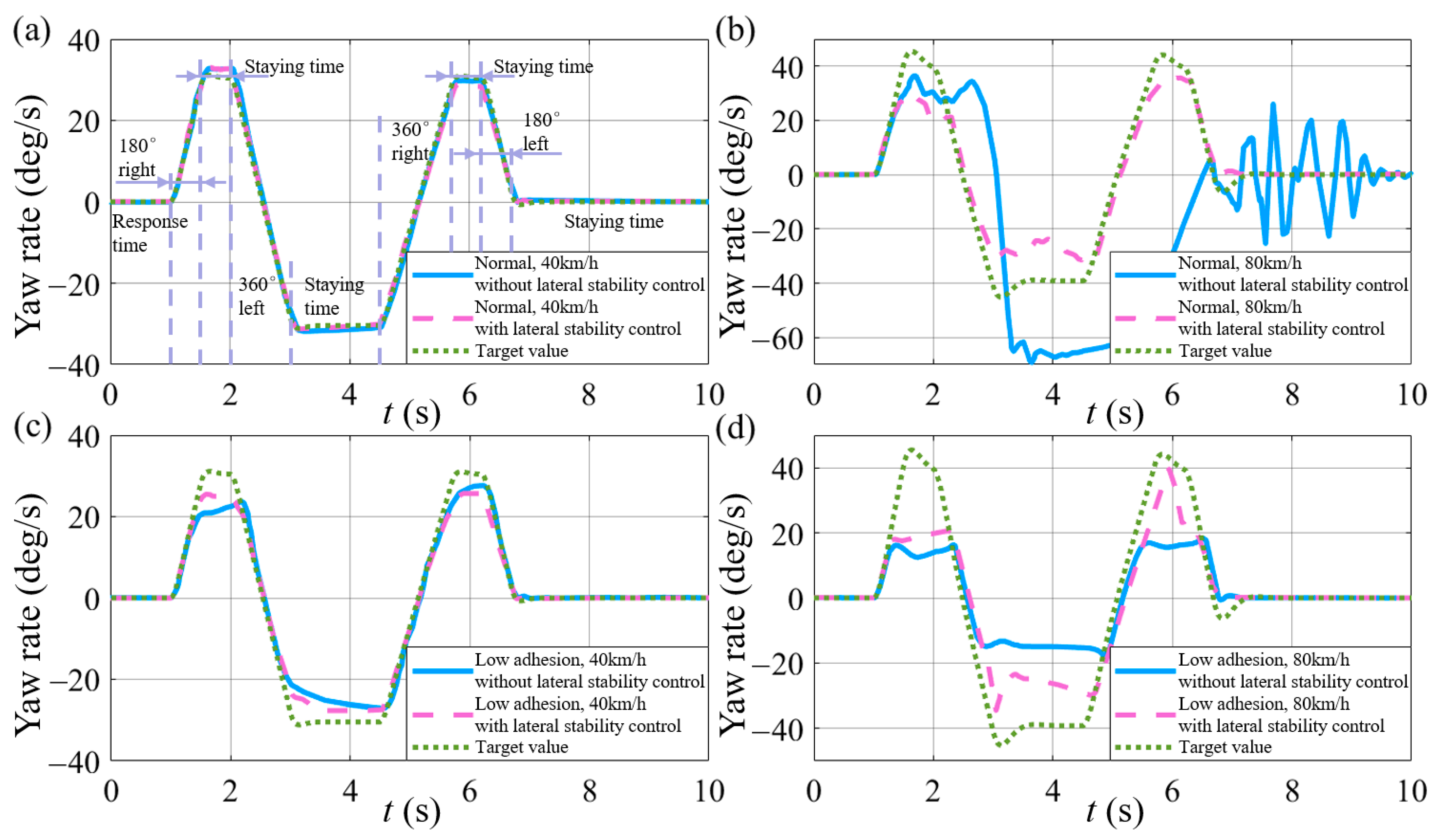
- The simulation results of the PID algorithm show that the yaw rate curves at the different road conditions and speed conditions were corrected to a certain extent, which verified that the algorithm can be effectively adapted to the different road conditions and vehicle speeds.
- (2)
- The simulation results without iterative training show that the yaw rate curve is smoother. And the fluctuation of the curve was corrected as the training was iterated. The algorithm can prevent the accident from sudden changes and optimize itself continuously.
- (3)
- The training results of the BP neural network-based PID algorithm show that the correction effect of this algorithm for yaw rate was further improved, which improves the stability of the BP neural network-based PID algorithm by improving the responsive speed.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, D.; Kim, K.; Lee, W.; Hwang, I. Development of Mando ESP (Electronic Stability Program); Report no. 0148-7191; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2003. [Google Scholar]
- Liu, K.; Gong, J.; Kurt, A.; Chen, H.; Ozguner, U. Dynamic Modeling and Control of High-Speed Automated Vehicles for Lane Change Maneuver. IEEE Trans. Intell. Veh. 2018, 3, 329–339. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Ju, Z.; Zhang, H.; Li, X.; Chen, X.; Han, J.; Yang, M. A Survey on Attack Detection and Resilience for Connected and Automated Vehicles: From Vehicle Dynamics and Control Perspective. IEEE Trans. Intell. Veh. 2022, 7, 815–837. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Pauli, L.; Karaman, S.; Rus, D. Parallel autonomy in automated vehicles: Safe motion generation with minimal intervention. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1928–1935. [Google Scholar]
- Cheng, S.; Wang, Z.; Yang, B.; Li, L.; Nakano, K. Quantitative Evaluation Methodology for Chassis-Domain Dynamics Performance of Automated Vehicles. IEEE Trans. Cybern. 2022, 53, 5938–5948. [Google Scholar] [CrossRef]
- Li, X. Trade-off between safety, mobility and stability in automated vehicle following control: An analytical method. Transp. Res. Part B Methodol. 2022, 166, 1–18. [Google Scholar] [CrossRef]
- Kang, C.; Shi, C.; Liu, Z.; Liu, Z.; Jiang, X.; Chen, S.; Ma, C. Research on the optimization of welding parameters in high-frequency induction welding pipeline. J. Manuf. Process. 2020, 59, 772–790. [Google Scholar] [CrossRef]
- Wang, P.; Pang, H.; Xu, Z.; Jin, J. Co-Estimation and Validation of Driving States of a 3-DOFs Vehicle Model Based on UKF Approach. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 6504–6510. [Google Scholar]
- Li, G.; Hong, W.; Zhang, D.; Zong, C. Research on control strategy of two independent rear wheels drive electric vehicle. Phys. Procedia 2012, 24, 87–93. [Google Scholar] [CrossRef]
- Fu, Q.; Zhao, L.; Cai, M.; Cheng, M.; Sun, X. Simulation research for quarter vehicle ABS on complex surface based on PID control. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; pp. 2072–2075. [Google Scholar]
- Cao, J.; Song, C.; Peng, S.; Song, S.; Zhang, X.; Xiao, F. Trajectory tracking control algorithm for autonomous vehicle considering cornering characteristics. IEEE Access 2020, 8, 59470–59484. [Google Scholar] [CrossRef]
- Dong, X.; Li, L.; Cheng, S.; Wang, Z. Integrated strategy for vehicle dynamics stability considering the uncertainties of side-slip angle. IET Intell. Transp. Syst. 2020, 14, 1116–1124. [Google Scholar] [CrossRef]
- Peng, Z.; Ning, G. 2 DOF lateral dynamic model with force input of skid steering wheeled vehicle. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–5. [Google Scholar]
- Chu, L.; Gao, X.; Guo, J.; Liu, H.; Chao, L.; Shang, M. Coordinated control of electronic stability program and active front steering. Procedia Environ. Sci. 2012, 12, 1379–1386. [Google Scholar] [CrossRef]
- Tekin, G.; Samim Unlusoy, Y. Design and simulation of an integrated active yaw control system for road vehicles. Int. J. Veh. Des. 2009, 52, 5–19. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J. Handling performance control for hybrid 8-wheel-drive vehicle and simulation verification. Veh. Syst. Dyn. 2016, 54, 1098–1119. [Google Scholar] [CrossRef]
- Wang, H.; Xue, C. Modelling and Simulation of Electric Stability Program for the Passenger Car; Report no. 0148-7191; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2004. [Google Scholar]
- Sabbioni, E.; Cheli, F. Analysis of ABS/ESP Control Logics Using a HIL Test Bench; Report no. 0148-7191; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Yu, H.; Cheli, F.; Castelli-Dezza, F. Optimal design and control of 4-IWD electric vehicles based on a 14-DOF vehicle model. IEEE Trans. Veh. Technol. 2018, 67, 10457–10469. [Google Scholar] [CrossRef]
- Perrelli, M.; Cosco, F.; Carbone, G.; Mundo, D. Evaluation of vehicle lateral dynamic behaviour according to ISO-4138 tests by implementing a 15-DOF vehicle model and an autonomous virtual driver. Int. J. Mech. Control 2019, 20, 31–38. [Google Scholar]
- Lu, X.; Shi, Q.; Li, Y.; Xu, K.; Tan, G. Road Adhesion Coefficient Identification Method Based on Vehicle Dynamics Model and Multi-Algorithm Fusion; Report no. 0148-7191; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Zhang, X.; Xu, Y.; Pan, M.; Ren, F. A vehicle ABS adaptive sliding-mode control algorithm based on the vehicle velocity estimation and tyre/road friction coefficient estimations. Veh. Syst. Dyn. 2014, 52, 475–503. [Google Scholar] [CrossRef]
- Savitski, D.; Schleinin, D.; Ivanov, V.; Augsburg, K.; Jimenez, E.; He, R.; Sandu, C.; Barber, P. Improvement of traction performance and off-road mobility for a vehicle with four individual electric motors: Driving over icy road. J. Terramech. 2017, 69, 33–43. [Google Scholar] [CrossRef]
- Yuan, C.-c.; Chen, L.; Wang, S.-h.; Jiang, H.-b. Research of electronic stability program based on the Mu control theory. In Proceedings of the 2010 International Conference on Computer and Communication Technologies in Agriculture Engineering, Chengdu, China, 12–13 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 379–381. [Google Scholar]
- Bo, L.; Cheng, Y.H. Robust controller design for regenerative braking control of electric vehicles. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; pp. 214–219. [Google Scholar]
- Zhang, J.; Wang, H.; Zheng, J.; Cao, Z.; Man, Z.; Yu, M.; Chen, L. Adaptive sliding mode-based lateral stability control of steer-by-wire vehicles with experimental validations. IEEE Trans. Veh. Technol. 2020, 69, 9589–9600. [Google Scholar] [CrossRef]
- Jin, L.; Xie, X.; Shen, C.; Wang, F.; Wang, F.; Ji, S.; Guan, X.; Xu, J. Study on electronic stability program control strategy based on the fuzzy logical and genetic optimization method. Adv. Mech. Eng. 2017, 9, 1687814017699351. [Google Scholar] [CrossRef]
- Jin, L.-q.; Song, C.-x.; Li, J.-h. Controll algorithm of combination with logic gate and PID control for vehicle electronic stability control. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 345–349. [Google Scholar]
- Taghavifar, H.; Hu, C.; Taghavifar, L.; Qin, Y.; Na, J.; Wei, C. Optimal robust control of vehicle lateral stability using damped least-square backpropagation training of neural networks. Neurocomputing 2020, 384, 256–267. [Google Scholar] [CrossRef]
- Li, C.; He, C.; Yuan, Y.; Zhang, J. Yaw stability control based on a novel electronic hydraulic braking system. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1395–1399. [Google Scholar]
- Yu, C.-H.; Tseng, C.-Y.; Hsu, Y.-S. Electronic stability control for direct-drive Electric Vehicle. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4987–4991. [Google Scholar]
- Wang, J.; Qiao, J.; Qi, Z. Research on control strategy of regenerative braking and anti-lock braking system for electric vehicle. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–7. [Google Scholar]
- Drakunov, S.; Ozguner, U.; Dix, P.; Ashrafi, B. ABS control using optimum search via sliding modes. IEEE Trans. Control Syst. Technol. 1995, 3, 79–85. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Liu, H.; Hu, Y.; Chen, H. Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework. Mech. Syst. Signal Process. 2021, 161, 107947. [Google Scholar] [CrossRef]
- Cho, K.; Kim, J.; Choi, S. The integrated vehicle longitudinal control system for ABS and TCS. In Proceedings of the 2012 IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 1322–1327. [Google Scholar]
- Guo, J.; Chu, L.; Liu, H.; Shang, M.; Fang, Y. Integrated control of active front steering and electronic stability program. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 449–453. [Google Scholar]
- Tian, Y.; Cao, X.; Wang, X.; Zhao, Y. Four wheel independent drive electric vehicle lateral stability control strategy. IEEE/CAA J. Autom. Sin. 2020, 7, 1542–1554. [Google Scholar] [CrossRef]
- Fittro, R.; Knospe, C. μ Control of a High Speed Spindle Thrust Magnetic Bearing. In Proceedings of the 1999 IEEE International Conference on Control Applications (Cat. No.99CH36328), IEEE, Kohala Coast, HI, USA, 22–27 August 1999; Volume 1, pp. 570–575. [Google Scholar]
- Setiawan, J.D.; Safarudin, M.; Singh, A. Modeling, simulation and validation of 14 DOF full vehicle model. In Proceedings of the International Conference on Instrumentation, Communication, Information Technology, and Biomedical Engineering 2009, Bandung, Indonesia, 23–25 November 2009; pp. 1–6. [Google Scholar]
- Shim, T.; Ghike, C. Understanding the limitations of different vehicle models for roll dynamics studies. Veh. Syst. Dyn. 2007, 45, 191–216. [Google Scholar] [CrossRef]
- Pacejka, H. Modelling of the Pneumatic Tyre and Its Impact on Vehicle Dynamic Behaviour; Vehicle Research Laboratory, Delft University of Technology: Delft, The Netherlands, 1989. [Google Scholar]
- Svoboda, M.; Biba, D.; Musuroi, S.; Ancuti, C.-M.; Sorandaru, C. Modeling of squirrel cage induction machine with S-function in MATLAB Simulink. In Proceedings of the 2017 14th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 1–2 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 176–179. [Google Scholar]
- Ivanov, V. A review of fuzzy methods in automotive engineering applications. Eur. Transp. Res. Rev. 2015, 7, 29. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fx | Fy | Mz | |
|---|---|---|---|
| X | obtained from S in Equation (17) | obtained from α in Equation (14) | obtained from α in Equation (14) |
| D | obtained from Fz in Equation (9) | obtained from Fz in Equation (9) | obtained from Fz in Equation (9) |
| C | 1.65 | 1.30 | 2.40 |
| B | obtained from Fz, C, and D | obtained from Fz, C, and D | obtained from Fz, C, and D |
| E | obtained from Fz in Equation (9) | obtained from Fz in Equation (9) | obtained from Fz in Equation (9) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Kang, C.; Li, B.; Ruan, J.; Zheng, X. Dynamic Modeling, Simulation, and Optimization of Vehicle Electronic Stability Program Algorithm Based on Back Propagation Neural Network and PID Algorithm. Actuators 2024, 13, 100. https://doi.org/10.3390/act13030100
Wu Z, Kang C, Li B, Ruan J, Zheng X. Dynamic Modeling, Simulation, and Optimization of Vehicle Electronic Stability Program Algorithm Based on Back Propagation Neural Network and PID Algorithm. Actuators. 2024; 13(3):100. https://doi.org/10.3390/act13030100
Chicago/Turabian StyleWu, Zheng, Cunfeng Kang, Borun Li, Jiageng Ruan, and Xueke Zheng. 2024. "Dynamic Modeling, Simulation, and Optimization of Vehicle Electronic Stability Program Algorithm Based on Back Propagation Neural Network and PID Algorithm" Actuators 13, no. 3: 100. https://doi.org/10.3390/act13030100
APA StyleWu, Z., Kang, C., Li, B., Ruan, J., & Zheng, X. (2024). Dynamic Modeling, Simulation, and Optimization of Vehicle Electronic Stability Program Algorithm Based on Back Propagation Neural Network and PID Algorithm. Actuators, 13(3), 100. https://doi.org/10.3390/act13030100