
Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction: Electromagnetic Actuators as Part of Active Magnetic Bearing Systems
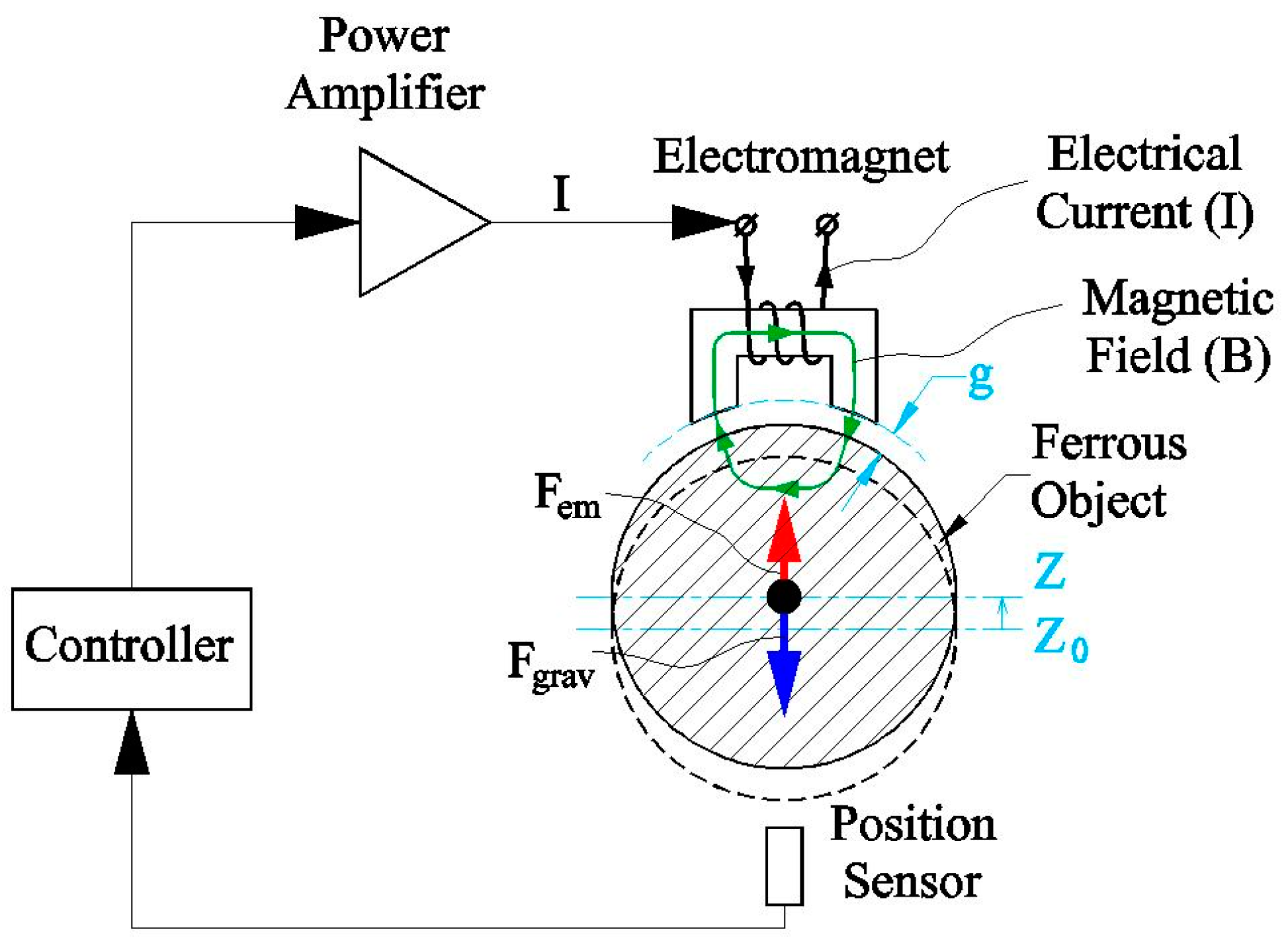
- An electromagnetic actuator is configured to exert forces on a supported ferromagnetic object.
- The object position in space is monitored by a position sensor.
- The position sensor provides information about the object position to a control system.
- The control system adjusts the current in the actuator in response to changes in the position and an application specific control input.
- Force is applied by the actuator on the object to maintain the object in the desired position in space without coming into mechanical contact.
- (a).
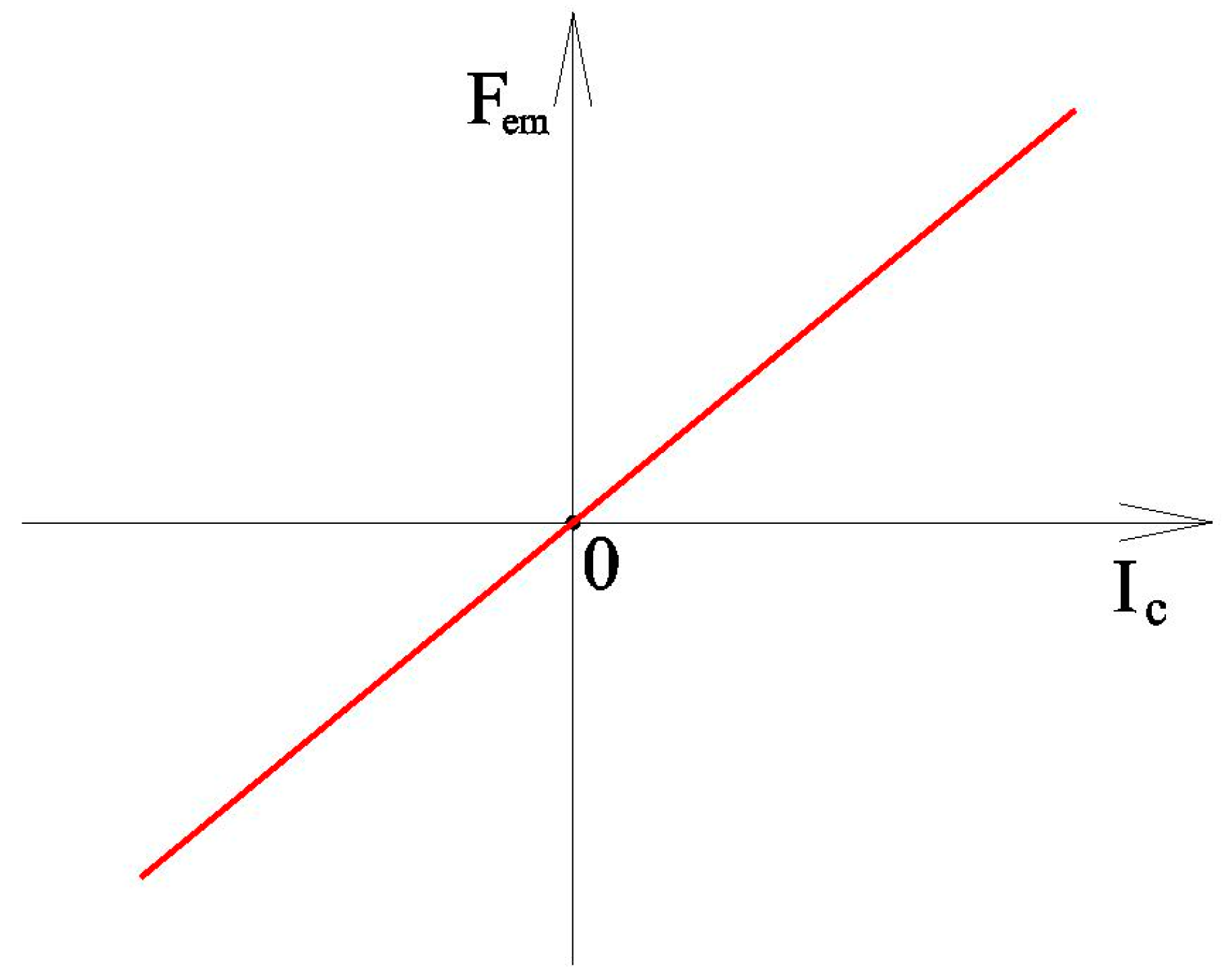
- Current I in the electromagnet.
- (b).
- Gap between the object and the electromagnet g, also represented by the object position Z.
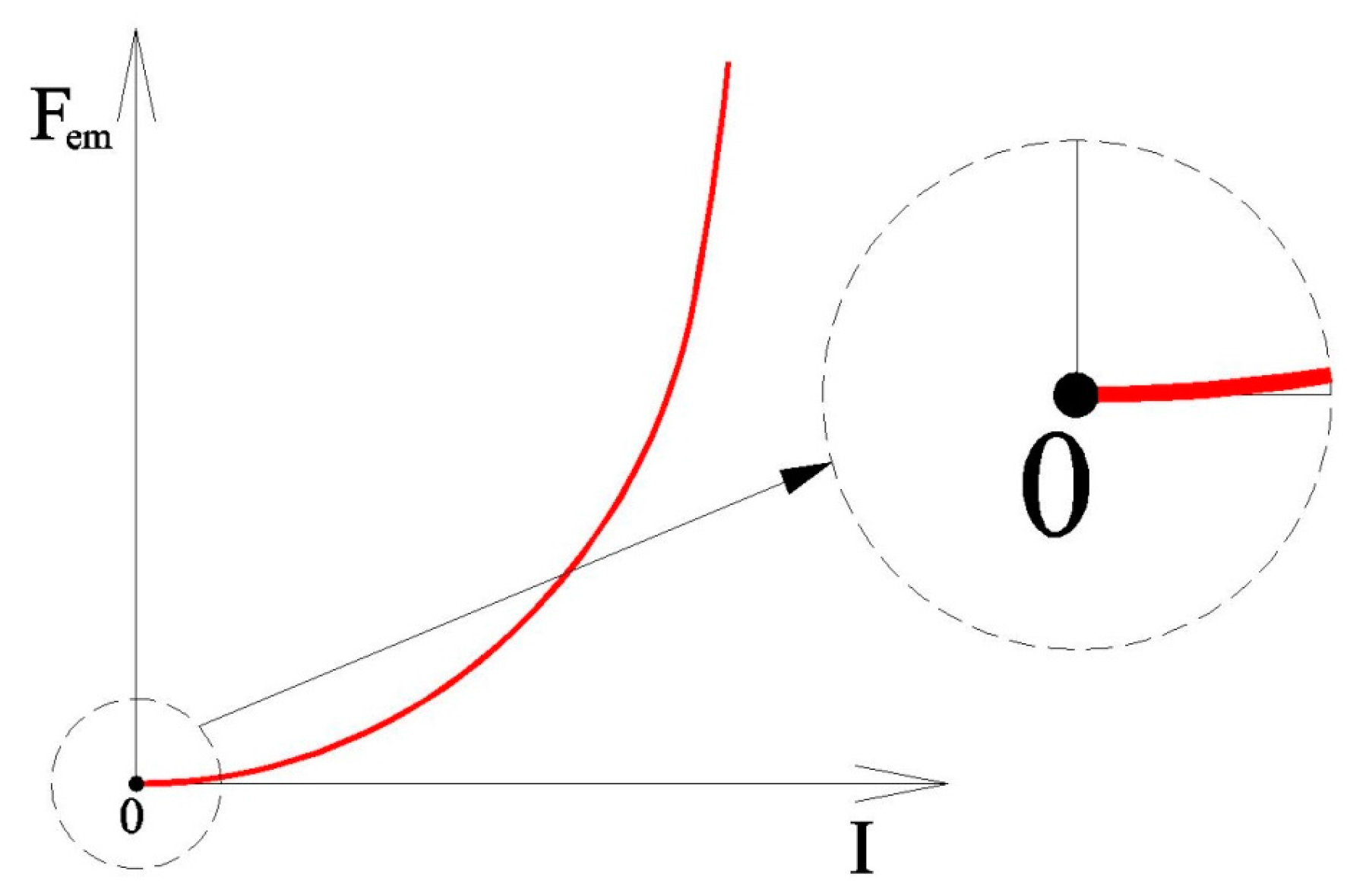
- (1)
- Fitting into a specific rotor design to enable subcritical operation of the machine;
- (2)
- Minimal loss of the actuator load capacity with speed due to the eddy currents;
- (3)
- Minimal loss of the actuator gain and load capacity with frequency due to the eddy currents;
- (4)
- Minimal phase lag between the control current and the force produced by the actuator due to the eddy currents induced when reacting to a dynamic load;
- (5)
- Minimal electrical resistive losses in the actuator target at speed due to the eddy currents;
- (6)
- Minimal actuator negative stiffness;
- (7)
- Minimal aerodynamic drag (for applications not operating in vacuum);
- (8)
- Compactness;
- (9)
- Low cost;
- (10)
- Ease of manufacturing.
2. Radial Homopolar Electromagnetic Actuators: Design Choices
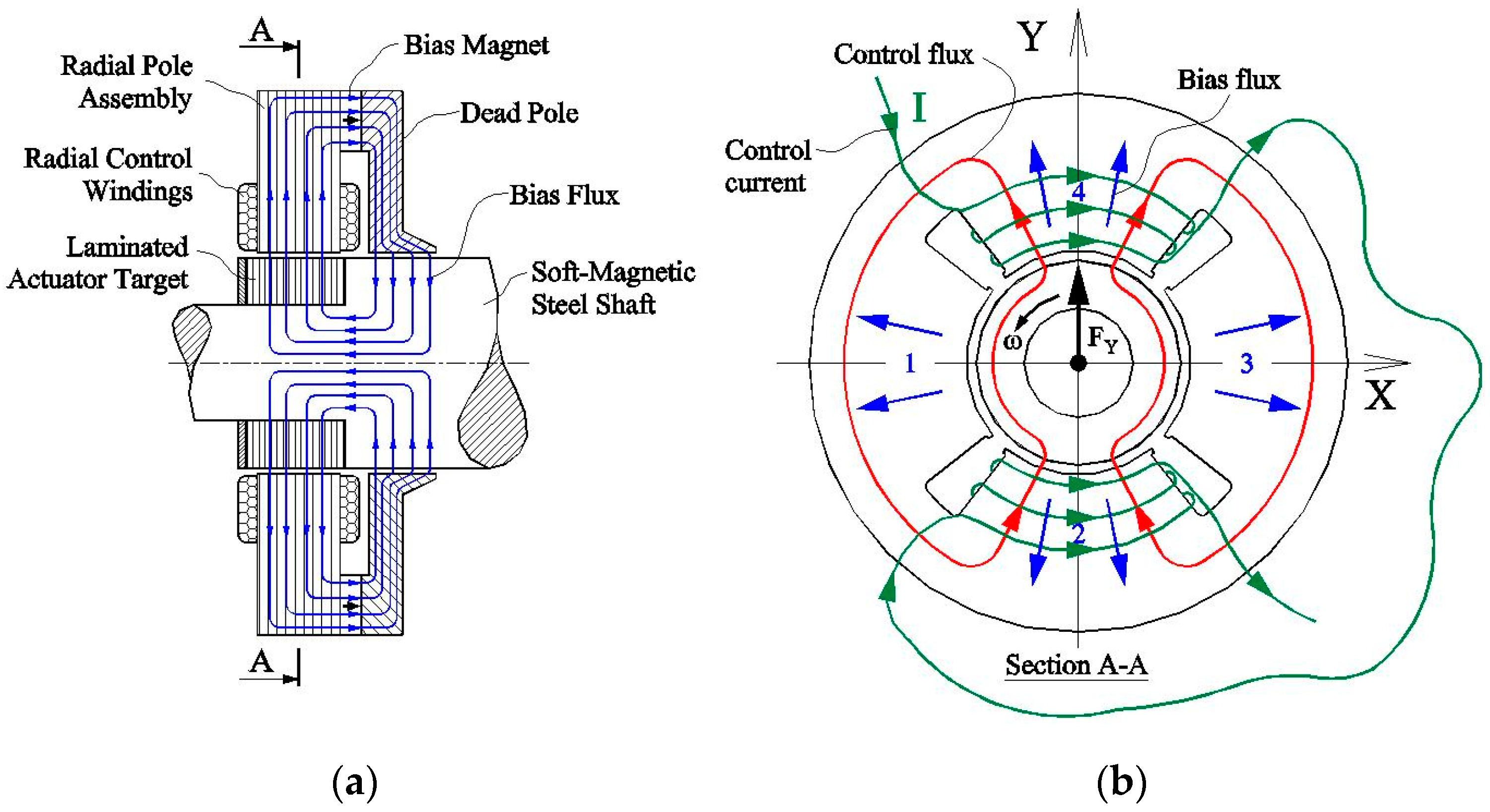
2.1. Separating Bias and Control Magnetic Circuits
- (1)
- The bias magnetic flux becomes less dependent on the temperature because it is controlled (to some extent) by the saturation flux density of the dead pole material, which does not change with temperature nearly as much as the magnetic flux emanated from the magnet.
- (2)
- The contribution to the negative stiffness from the dead pole decreases because the total flux under the dead pole does not increase as much when the rotor deviates from the centered position as it would if the dead pole was not saturated. The negative stiffness can be reduced even further if the dead pole is made axially longer in close proximity of the rotor as shown in Figure 12, Figure 13 and Figure 14 because this lowers the flux density in the air gap between the dead pole and the rotor [4]. The axial extension to the dead pole in most machines fits conveniently under the endturn of a nearby motor, thus not adding any extra length to the rotor.
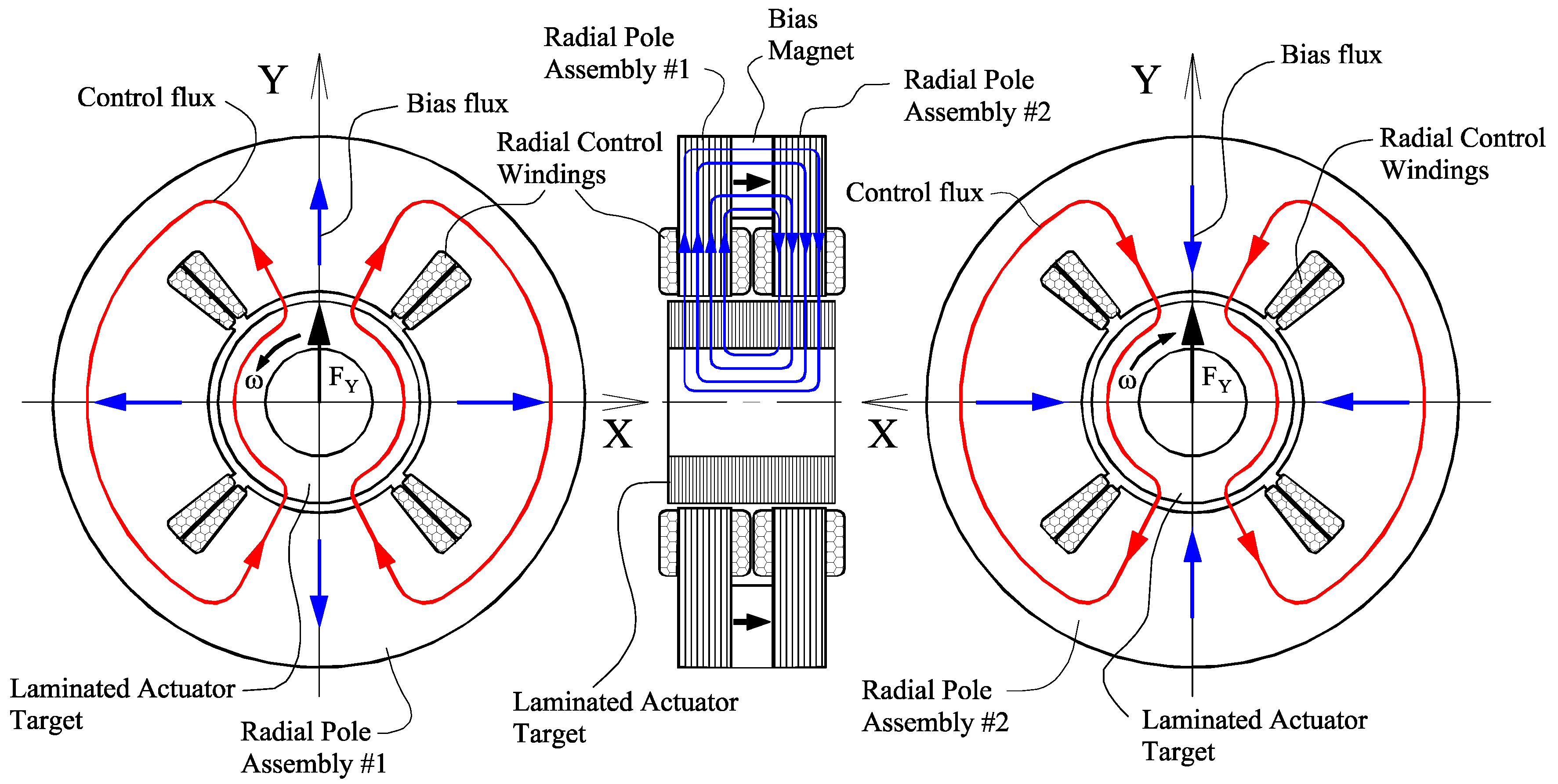
2.2. Using Permanent Magnets to Generate Bias Flux
- (1)
- For the same amount of the bias flux generated in a magnetic circuit with reluctance typical for magnetic bearings, permanent magnets end up being much smaller than coils.
- (2)
- Using permanent magnets in the bias circuit results in significantly smaller negative stiffness than when using coils due to the large internal reluctance of the magnets (see [5] for details).
- (3)
- Fewer wires between the machine and the magnetic bearing controller and fewer feedthroughs on the machine side (especially important when the machine has to be hermetically sealed).
- (4)
- No amplifier (current source) is needed for the bias circuit.
- (5)
- No power dissipation in the bias circuit.
- (1)
- Bias flux may change with temperature unless preventive measures such as saturating the dead pole were taken. In practice, however, the change of the bias flux with temperature in this type of bearings does not greatly affect the bearing controllability, but does reduce gain and load capacity, which needs to be taken into account at the design stage.
- (2)
- Magnets cannot be “turned-off”, which complicates the assembly.
- (3)
- Magnets are more expensive than coils.
- (1)
- Much smaller control coils—should the control flux go through a magnet, which has relative permeability very close to one, the additional reluctance of the magnet would require a very high number of additional Ampere-turns in a coil to maintain the same flux level.
- (2)
- No risk of demagnetizing the magnet with the control magnetic field. This risk becomes especially high in designs where the control field does go through the magnet and, in the attempt to minimize the increase of the control coil size due to the additional magnet reluctance (see the first item above), the magnets are made thin with a large surface area (to maintain the needed bias flux level).
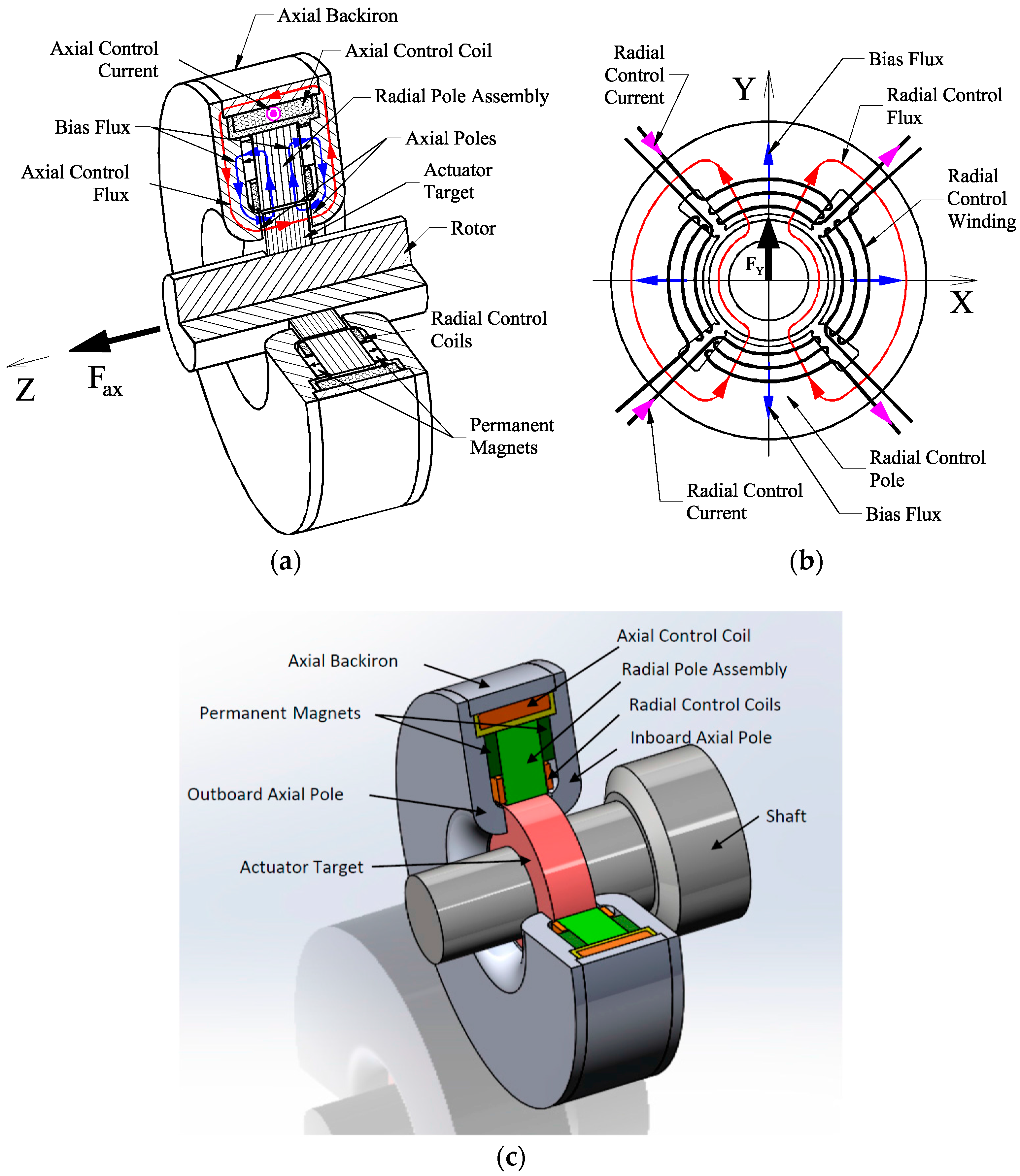
2.3. Combination Radial/Axial Homopolar PM-Biased Actuators
- (1)
- The radial bias flux changes with the axial control current and (to a lesser degree) with the axial position of the rotor resulting in the axial-to-radial cross-coupling. This is because the leakage flux in Figure 18 adds to or subtracts from the bias flux shown in Figure 17 in the radial air gaps and control poles.
- (2)
- The axial force-vs.-current curve becomes non-linear because the control flux in the right axial pole is always greater in magnitude than the control flux in the left pole due to the added leakage flux.
- (1)
- Shorter axial length leading to a more compact design and often to better rotordynamics.
- (2)
- Lower aerodynamic drag due to lower axial actuator target OD (outer diameter), except when the rotor spins in the vacuum.
- (3)
- Lower stresses in the rotor due to lower axial actuator target OD.
- (4)
- Lower part count.
- (5)
- Lower, and nearly constant, negative stiffness.
- (1)
- “Symmetric” combination actuator
- Advantages
- No need for the compensation coil.
- Works with non-magnetic shafts (actually it works better with non-magnetic shaft).
- The most axially compact design.
- Easy integration into a soft-magnetic housing because the entire actuator is already enclosed by soft-magnetic parts (axial poles and axial backiron).
- Disadvantages
- Limited axial bandwidth due to
- Long distance the control magnetic flux has to travel thru non-laminated axial poles and axial backiron;
- Macroscopic currents induced in continuous radial backiron surrounding the axial control magnetic flux flowing in the actuator target.
- Limited axial load capacity due to the limited outer diameter of the actuator target (which is limited because the entire actuator target is made laminated and electrical steel laminations have smaller strength than solid steel, especially when they are pre-stressed due to the shrink-fit installation on the shaft).
- In some applications with large overhang mass(es) at the rotor end(s) (such as overhang impellers in turbocompressors and turboexpanders), having the reduced shaft diameters on both sides of the actuator target negatively effects (reduces) the first bending mode frequency.
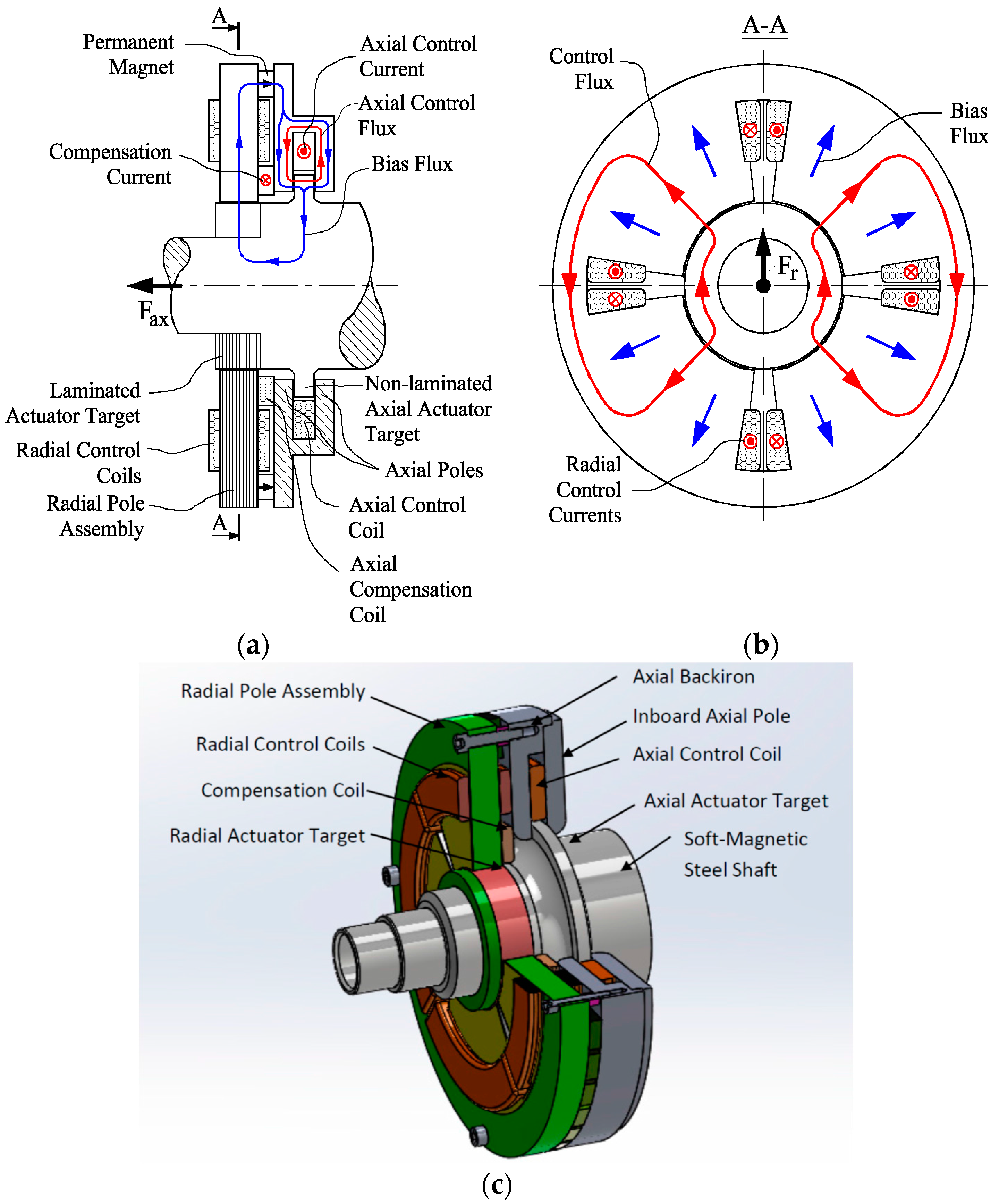
- (2)
- “Side-by-side” combination actuator
- Advantages
- Good axial bandwidth right from the start without any modifications complicating the design.
- Works very well with soft-magnetic shafts.
- The gradual decrease of the shaft diameter from the axial actuator portion to the radial actuator portion makes these actuators a perfect fit for turbocompressor/expanders with overhang impellers because this geometry helps increasing the rotor first bending mode frequency.
- Disadvantages
- Requires a compensation coil.
- If the shaft is non-magnetic, a soft-magnetic coupler has to be added to link magnetically the radial and axial actuator targets.
- The actuator OD has to be separated from the housing when the housing is soft-magnetic to avoid magnetic shorting the magnets.
3. Design and Analysis of Homopolar PM-Biased Actuators
- Rleak_top = Rleak_top1 || Rleak_top2 || Rleak_top3;
- Rleak_ax-rad = Rleak_ax-rad1 || Rleak_ax-rad2/4 (divided by four because there are four poles with associated reluctances connected in parallel);
- Rrad_tot = (Rrad || Rfr_rad || Rleak_rad1)/4;
- Rax1_tot = Rax1 || Rfr_ax1 || Rleak_ax1-shaft || Rleak_ax1-trg_top || Rleak_ax1-trg_btm;
- Rax2_tot = Rax2 || Rfr_ax2 || Rleak_ax2-shaft || Rleak_ax2-trg_top || Rleak_ax2-trg_btm || Rfr_ax2-shaft || Rleak_ax2-shaft_side;
4. Application Examples
4.1. Flywheel Energy Storage
4.2. Turbocompressors and Gas Blowers
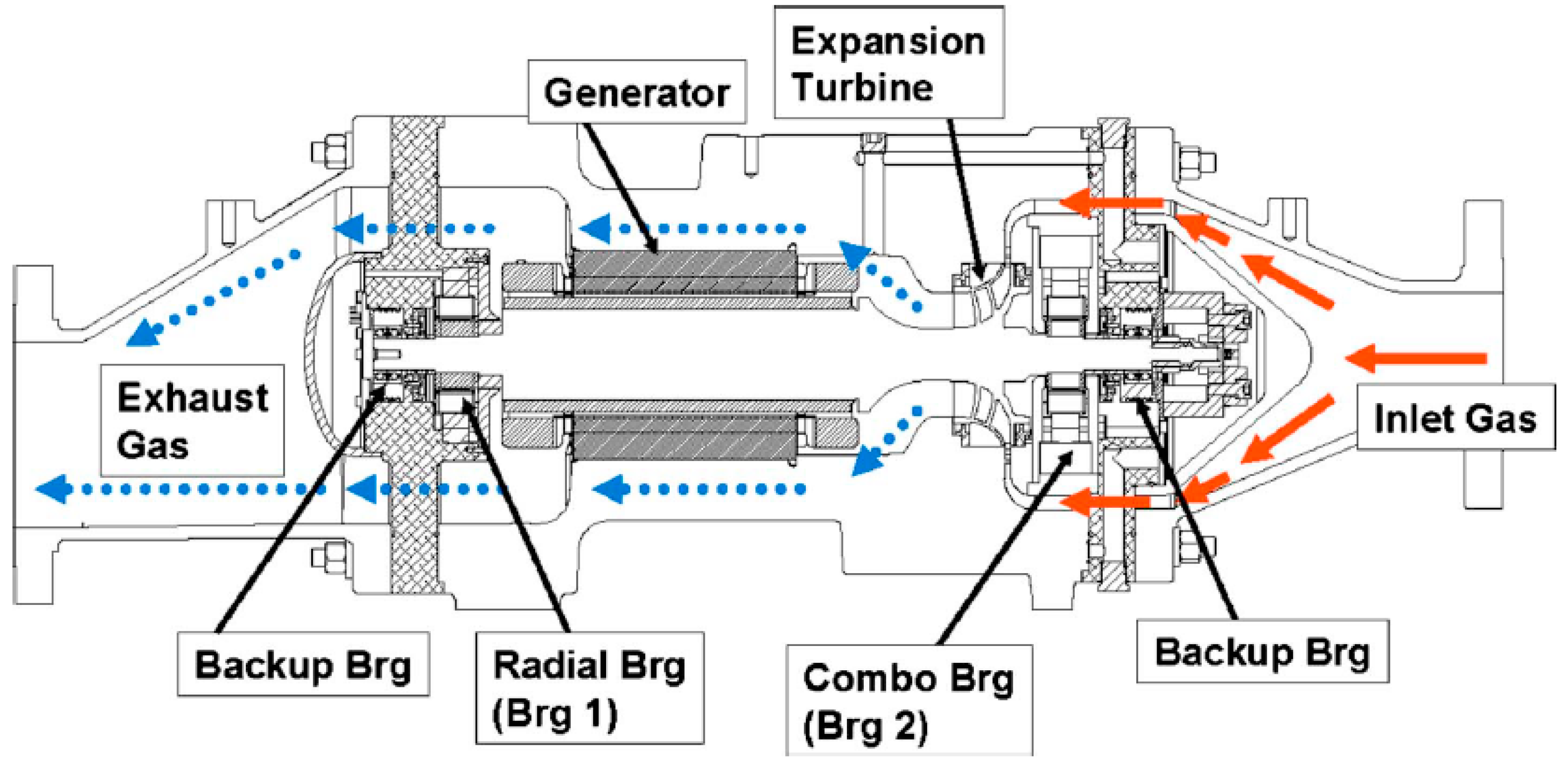
4.3. Gas Expanders
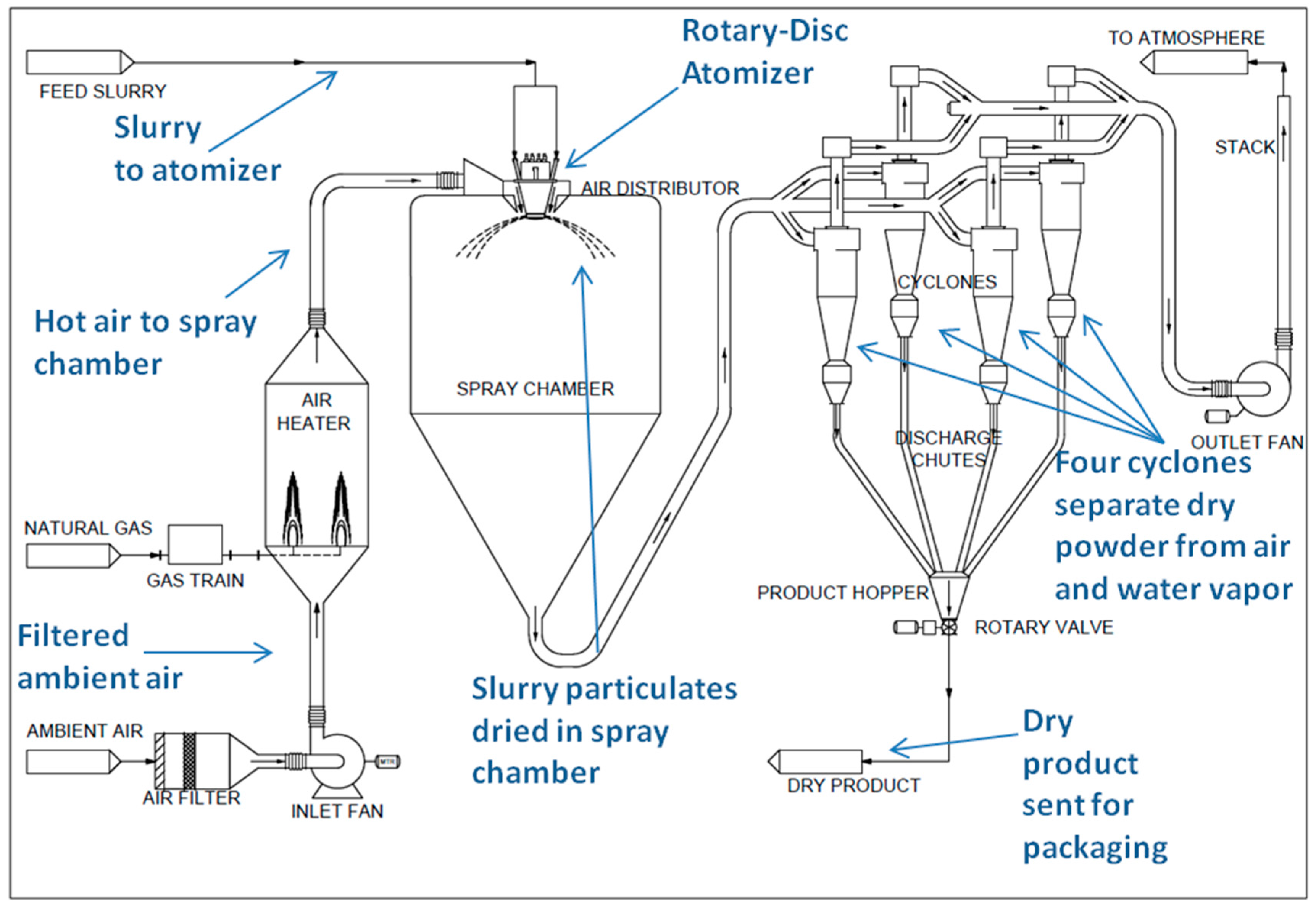
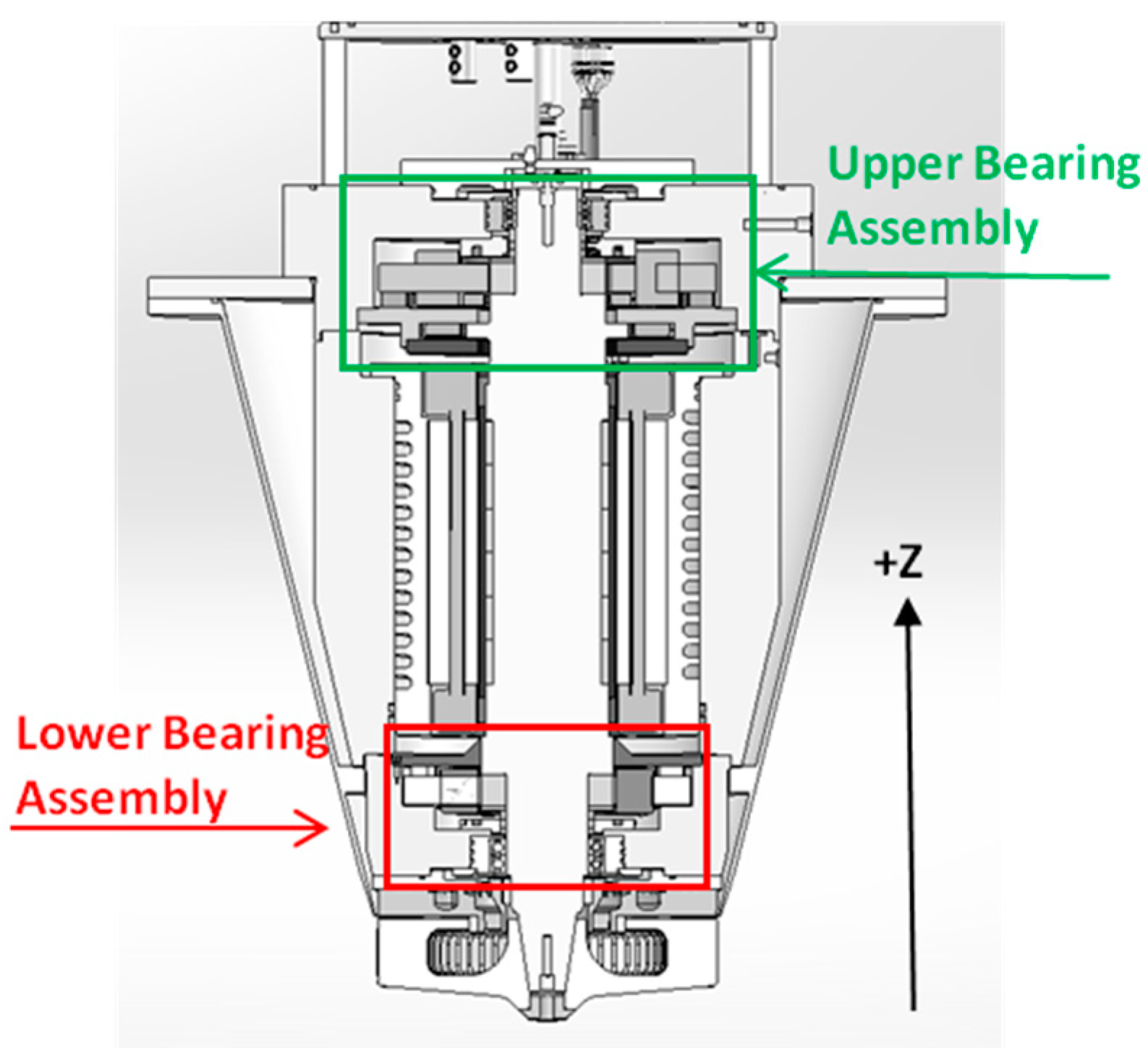
4.4. Rotary Atomizers
5. Conclusions
Conflicts of Interest
References
- Schweitzer, G.; Maslen, E. Magnetic Bearings: Theory, Design and Application to Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Stoll, R. The Analysis of Eddy Currents; Oxford University Press: London, UK, 1974. [Google Scholar]
- Genta, G. Dynamics of Rotating Systems; Springer: New York, NY, USA, 2005. [Google Scholar]
- Filatov, A.V.; McMullen, P.T.; Hawkins, L.A.; Blumber, E.J. Magnetic Bearing Actuator Design for a Gas Expander Generator. In Proceedings of the 9th International Symposium on Magnetic Bearings, Lexington, KY, USA, 3–6 August 2004.
- Filatov, A.; Hawkins, L. Comparative Study of Axial/Radial Magnetic Bearing Arrangements for Turbocompressor Applications. Proc. Inst. Mech. Eng. I J. Syst. Control Eng. 2016, 230–234, 300–310. [Google Scholar] [CrossRef]
- Filatov, A.; Hawkins, L.A. Comparative Study of Axial/Radial Magnetic Bearing Arrangements for Turbocompressor Applications. In Proceedings of the 14th International Symposium on Magnetic Bearings, Linz, Austria, 11–14 August 2014.
- McMullen, P.T.; Huynh, C.S.; Hayes, R.J. Combination Radial-Axial Magnetic Bearing. In Proceedings of the 7th International Symposium on Magnetic Bearings, Zurich, Switzerland, 23–25 August 2000.
- Sortore, C.K.; Allaire, P.E.; Maslen, E.H.; Humphris, R.R. Design of Permanent Magnet Biased Magnetic Bearings for a Flexible Rotor. In Proceedings of the ROMAC Conference, Charlottesville, VA, USA, 2–5 April 1990.
- Filatov, A.; Hawkins, L.A. Novel Combination Radial/Axial Homopolar Active Magnetic Bearing. In Proceedings of the 1st Brazilian Workshop on Magnetic Bearings, Rio-De-Janeiro, Brazil, 25–26 October 2013.
- Filatov, A.; Hawkins, L.A.; Ukidve, C. Bias Flux Compensation in the “Side-By-Side” Combination Radial/Axial Homopolar PM-Biased Active Magnetic Bearing. In Proceedings of the 15th International Symposium on Magnetic Bearings, Kitakyushu, Japan, 3–6 August 2016.
- Filatov, A.; Hawkins, L.A. Combination Axial and Radial Active Magnetic Bearing with Improved Axial Bandwidth. In Proceedings of the ASME Turbo Expo 2012: Power for Land, Sea and Air, Copenhagen, Denmark, 11–15 June 2012.
- Filatov, A.; Hawkins, L.A. Combination Radial/Axial Electromagnetic Actuator with an Improved Axial Bandwidth. U.S. Patent 8,847,451 B2, 30 September 2014. [Google Scholar]
- McCaig, M. Permanent Magnets in Theory and Practice; Pentech Press: London/Plymouth, UK, 1977. [Google Scholar]
- Finite Element Method Magnetics. Available online: http://www.femm.info/wiki/HomePage (accessed on 3 November 2016).
- McMullen, P.; Vuong, V.; Hawkins, L. Flywheel Energy Storage System with AMB’s and Hybrid Backup Bearings. In Proceedings of the 10th International Symposium on Magnetic Bearings, Martigny, Switzerland, 21–23 August 2006.
- Hawkins, L.A.; Zhu, L.; Blumber, E.J. Development of a 125 kW AMB Expander/Generator for Waste Heat Recovery. J. Eng. Gas Turbines Power 2011, 133, 187–194. [Google Scholar] [CrossRef]
- Khatri, R.K.; Hawkins, L.A.; Bazergui, C. Demonstrated Operability and Reliability Improvements for a Prototype High-Speed Rotary-Disc Atomizer Supported on Active Magnetic Bearings. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, Montreal, QC, Canada, 15–19 June 2015.


























© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Filatov, A.; Hawkins, L.; McMullen, P. Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems. Actuators 2016, 5, 26. https://doi.org/10.3390/act5040026
Filatov A, Hawkins L, McMullen P. Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems. Actuators. 2016; 5(4):26. https://doi.org/10.3390/act5040026
Chicago/Turabian StyleFilatov, Alexei, Larry Hawkins, and Patrick McMullen. 2016. "Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems" Actuators 5, no. 4: 26. https://doi.org/10.3390/act5040026
APA StyleFilatov, A., Hawkins, L., & McMullen, P. (2016). Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems. Actuators, 5(4), 26. https://doi.org/10.3390/act5040026