A Novel Mechanically Overdamped Actuator with Adjustable Stiffness (MOD-AwAS) for Safe Interaction and Accurate Positioning

Abstract
:1. Introduction
2. Stiffness Modeling and Design
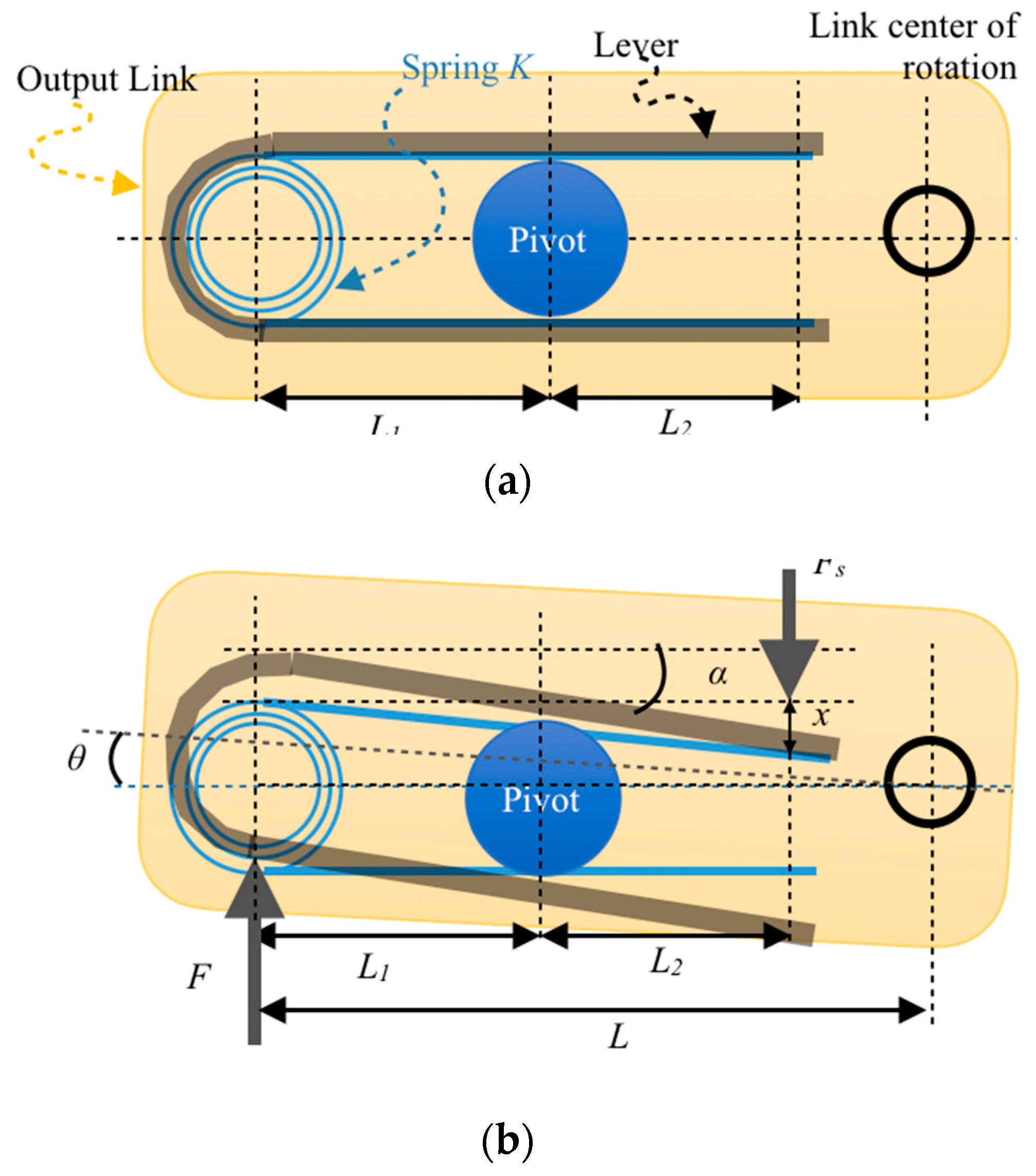
2.1. Stiffness Formulation
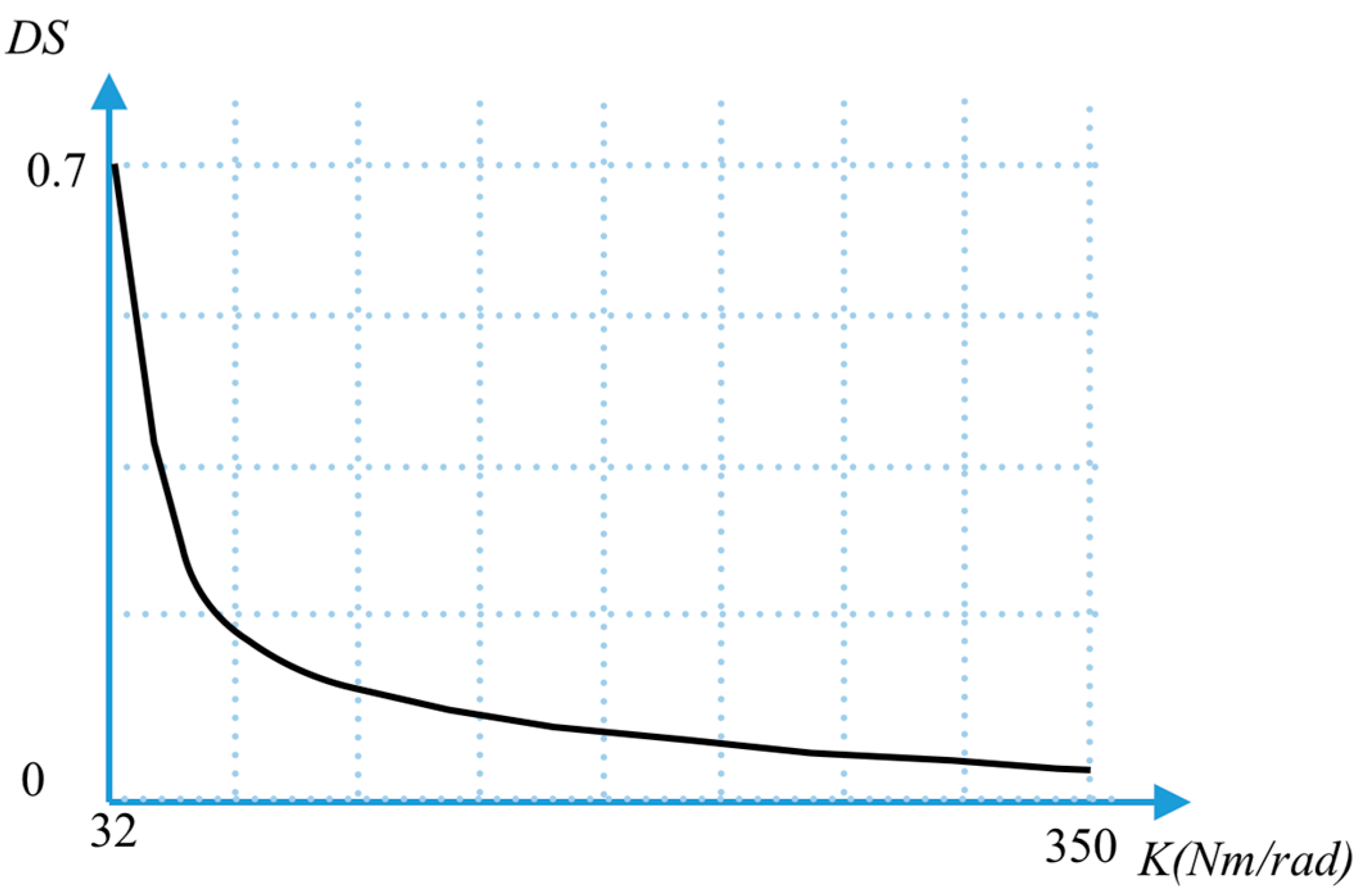
2.2. Damping Specification
2.3. Accessibility of the Link to Energy Storage Capacity
3. Physical Implementation and Preliminarily Experiments
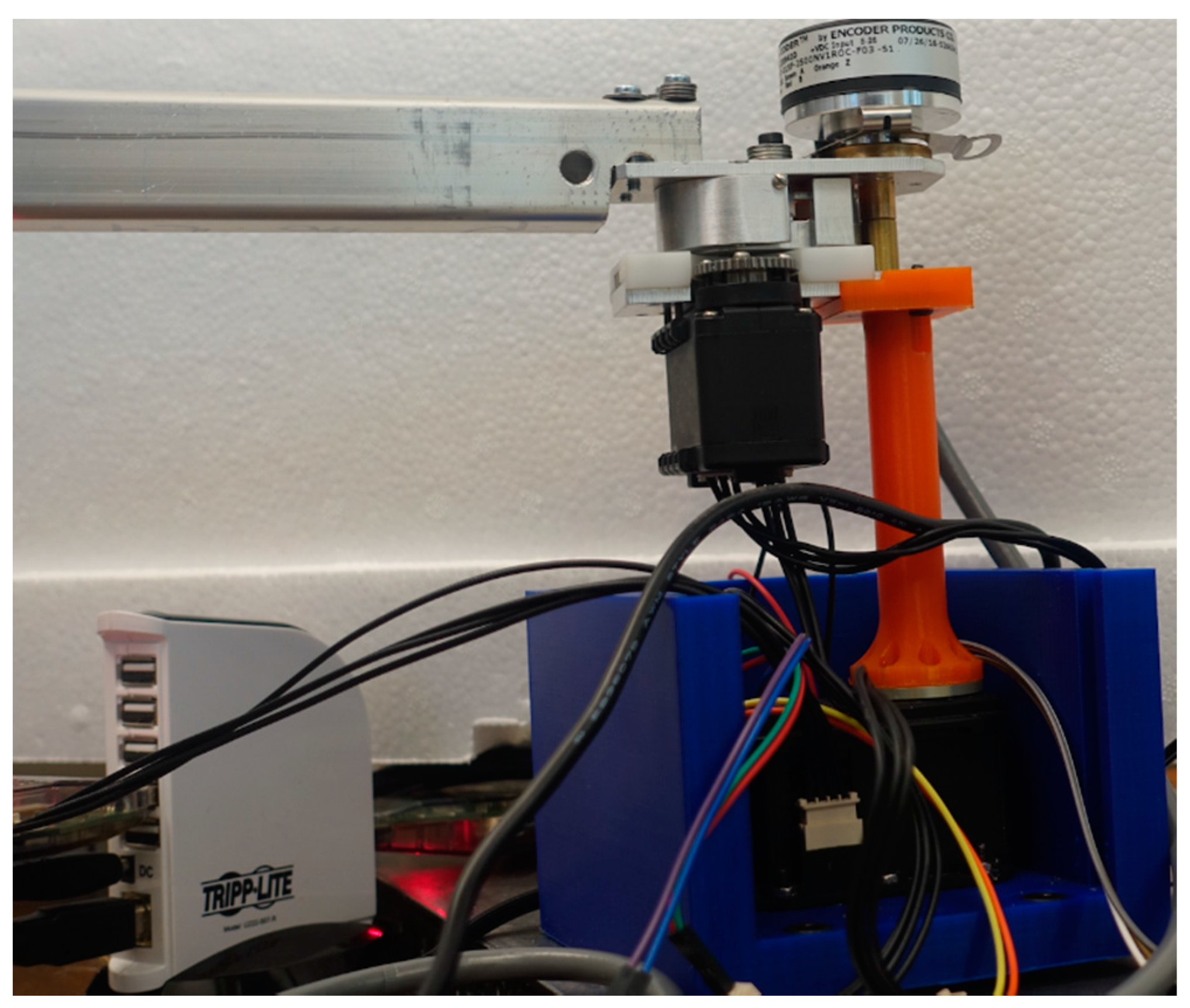
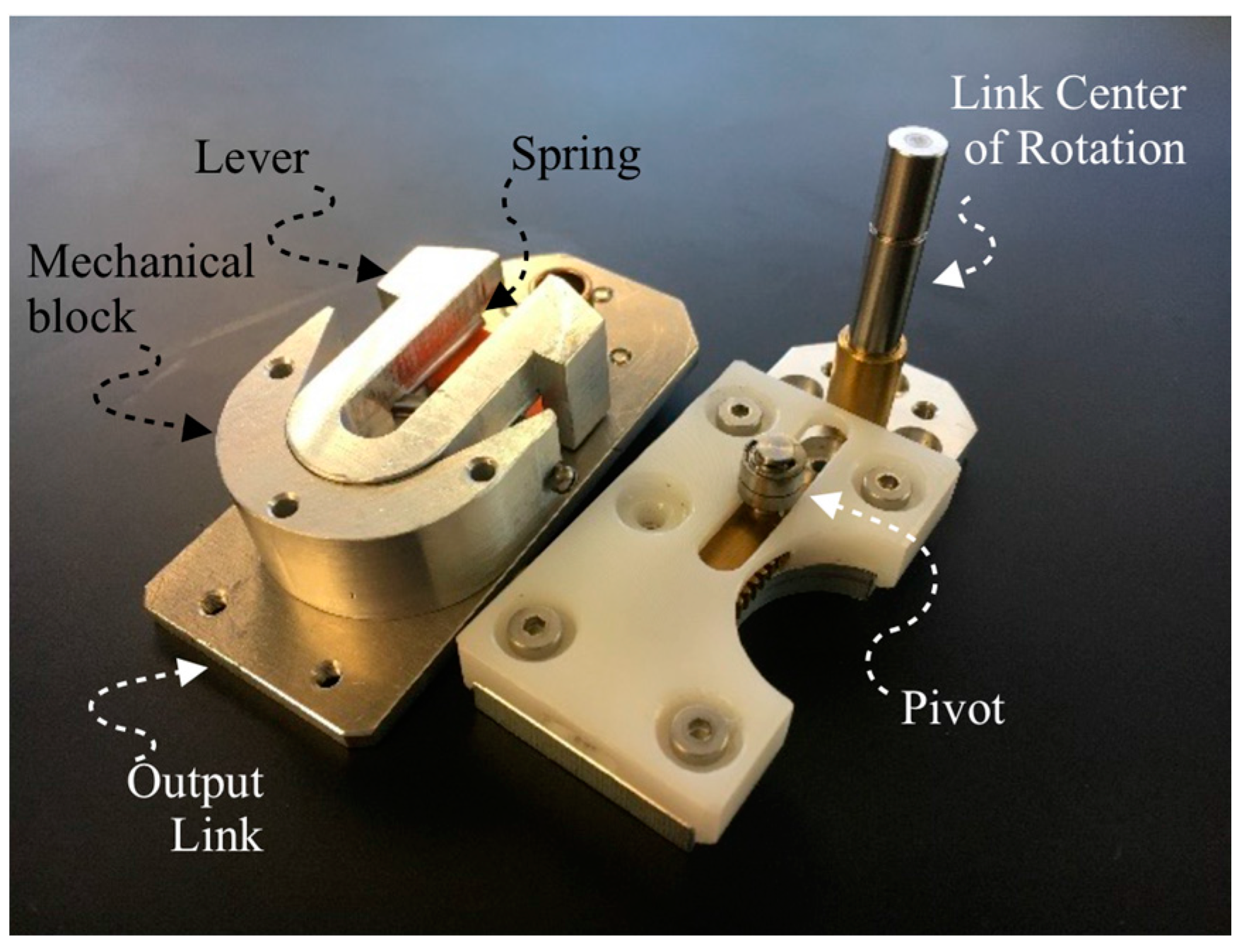
3.1. Physical Implementation
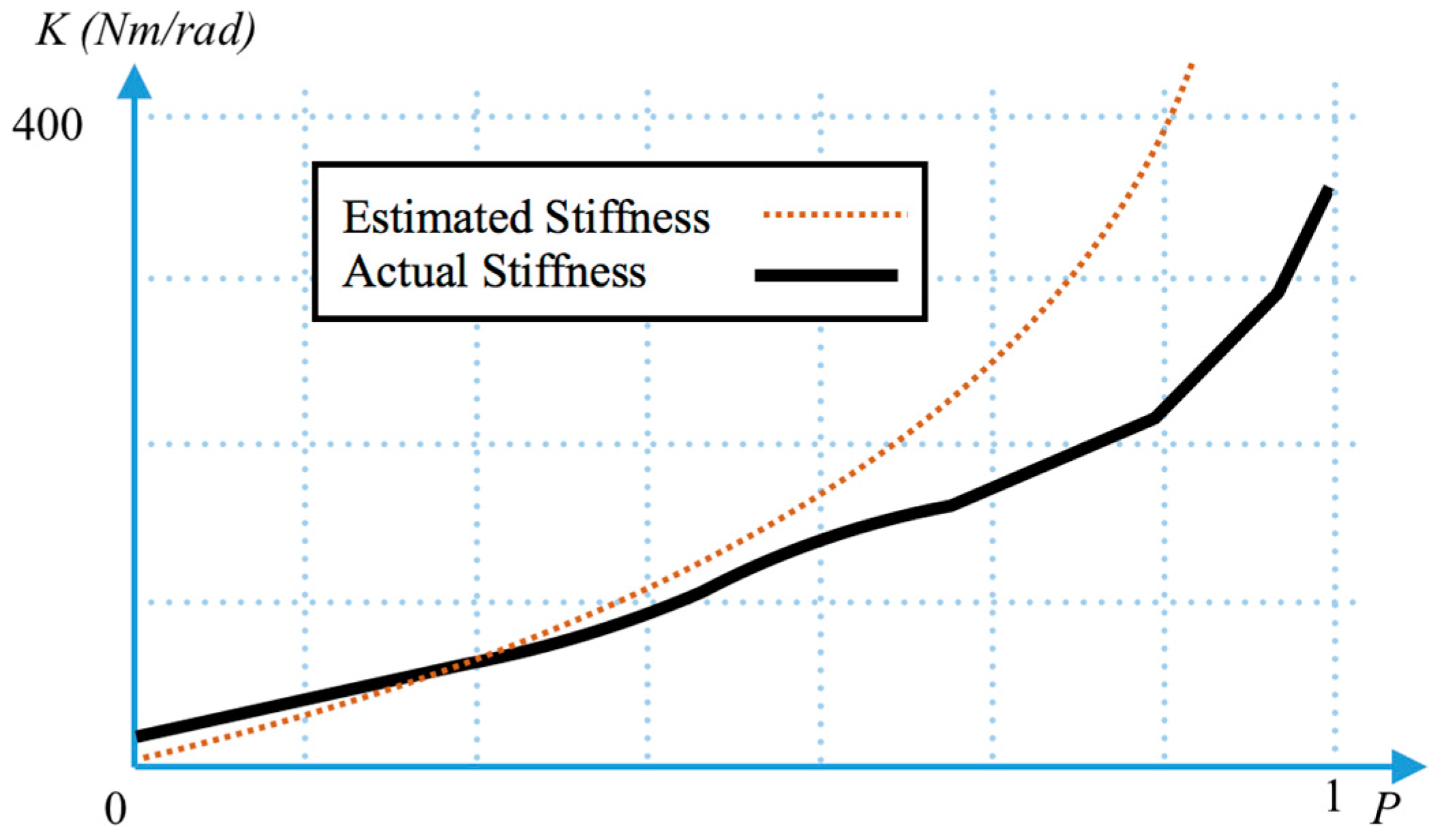
3.2. Preliminarily Experiments
4. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schiavi, R.; Grioli, G.; Sen, S.; Bicchi, A. VSA-II: A Novel Prototype of Variable Stiffness Actuator for Safe and Performing Robots Interacting with Humans. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Jafari, A.; Vanderborght, B.; Tsagarakis, N.; Cadwell, D. A Novel Actuator with Adjustable Stiffness (AwAS). In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4201–4206. [Google Scholar]
- Tsagarakis, N.G.; Sardellitti, I.; Caldwell, D.G. A New Variable Stiffness Actuator (CompAct-VSA): Design and Modelling. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Ketelaar, J.G.; Visser, L.C.; Stramigioli, S.; Carloni, R. Controller Design for a Bipedal Walking Robot Using Variable Stiffness Actuators. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Kizilhan, H.; Baser, O.; Kilic, E.; Ulusoy, N. Comparison of Controllable Transmission Ratio Type Variable Stiffness Actuator with Antagonistic and Pre-Tension Type Actuators for the Joints Exoskeleton Robots. In Proceedings of the 2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015. [Google Scholar]
- Vu, H.Q.; Yu, X.; Iida, F.; Pfeifer, R. Improving Energy Efficiency of Hopping Locomotion by Using a Variable Stiffness Actuator. IEEE/ASME Trans. Mechatron. 2016, 21, 472–486. [Google Scholar] [CrossRef]
- Kim, B.S.; Song, J.B. Hybrid Dual Actuator Unit: A Design of a Variable Stiffness Actuator Based on an Adjustable Moment Arm Mechanism. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Kim, B.S.; Kim, Y.L.; Song, J.B. Preliminary Experiments on Robotic Assembly Using a Hybrid-Type Variable Stiffness Actuator. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Budapest, Hungary, 3–7 July 2011. [Google Scholar]
- Berret, B.; Yung, I.; Nori, F. Open-Loop Stochastic Optimal Control of a Passive Noise-Rejection Variable Stiffness Actuator: Application to Unstable Tasks. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Vanderborght, B.; Albu-Schaeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable Impedance Actuators: A Review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef]
- Romano, F.; Fiorio, L.; Sandini, G.; Nori, F. Control of a Two-DoF Manipulator Equipped with a PNR-Variable Stiffness Actuator. In Proceedings of the 2014 IEEE International Symposium on Intelligent Control (ISIC), Juan Les Pins, France, 8–10 October 2014. [Google Scholar]
- Penzlin, B.; Liu, L.; Leonhardt, S.; Misgeld, B. Torque Estimation in Variable Stiffness Actuators. In Proceedings of the 2016 International Conference on Systems Informatics, Modelling and Simulation (SIMS), Riga, Latvia, 1–3 June 2016. [Google Scholar]
- Barrett, E.; Fumagalli, M.; Carloni, R. Elastic Energy Storage in Leaf Springs for a Lever-Arm Based Variable Stiffness Actuator. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Visser, L.C.; Carloni, R.; Klijnstra, F.; Stramigioli, S. A Prototype of a Novel Energy Efficient Variable Stiffness Actuator. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010. [Google Scholar]
- Carloni, R.; Marconi, L. Limit Cycles and Stiffness Control with Variable Stiffness Actuators. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Huang, T.H.; Kuan, J.Y.; Huang, H.P. Design of a New Variable Stiffness Actuator and Application for Assistive Exercise Control. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Bacek, T.; Unal, R.; Moltedo, M.; Junius, K.; Cuypers, H.; Vanderborght, B.; Lefe, D. Conceptual Design of a Novel Variable Stiffness Actuator for Use in Lower Limb Exoskeletons. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015. [Google Scholar]
- Cui, Z.; Cui, Y.; Qian, D.; Song, W.; Li, Y. Simulation Research and Experimental Verification of a Variable Stiffness Actuator with Automatic Rigidity/Compliance Switching. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015. [Google Scholar]
- Tonietti, G.; Schiavi, R.; Bicchi, A. Design and Control of a Variable Stiffness Actuator for Safe and Fast Physical Human/Robot Interaction. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Sunghoi, H.; Tonietti, G.; Bicchi, A. Neural Network Based Robust Adaptive Control for a Variable Stiffness Actuator. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar]
- Sardellitti, I.; Medrano-Cerda, G.; Tsagarakis, N.G.; Jafari, A.; Caldwell, D.G. A Position and Stiffness Control Strategy for Variable Stiffness Actuators. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Sardellitti, I.; Medrano-Cerda, G.; Tsagarakis, N.G.; Jafari, A.; Caldwell, D.G. Gain Scheduling Control for a Class of Variable Stiffness Actuators Based on Lever Mechanisms. IEEE Trans. Robot. 2013, 29, 791–798. [Google Scholar] [CrossRef]
- Macnard, T.; Grioli, G.; Bicchi, A. A Real Time Robust Observer for an Agonist-Antagonist Variable Stiffness Actuator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Popov, D.; Gaponov, I.; Ryu, J.H. Towards Variable Stiffness Control of Antagonistic Twisted String Actuators. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Macnard, T.; Grioli, G.; Bicchi, A. A Stiffness Estimator for Agonistic-Antagonistic Variable-Stiffness-Actuator Devices. IEEE Trans. Robot. 2014, 30, 1269–1278. [Google Scholar]
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable Stiffness Actuator for Soft Robotics Using Dielectric Elastomer and Low-Melting-Point Alloy. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Schimmels, J.M.; Garces, D.R. The Arched Flexure VSA: A Compact Variable Stiffness Actuator with Large Stiffness Range. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. AwAS-II: A New Actuator with Adjustable Stiffness Based on the Novel Principle of Adaptable Pivot Point and Variable Lever Ratio. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Sardellitti, I.; Caldwell, D.G. How Design can Affect the Energy Required to Regulate the Stiffness in Variable Stiffness Actuators. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Kim, B.S.; Song, J.B. Design and Control of a Variable Stiffness Actuator Based on Adjustable Moment Arm. IEEE Trans. Robot. 2012, 28, 1145–1151. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. A Novel Intrinsically Energy Efficient Actuator with Adjustable Stiffness (AwAS). IEEE/ASME Trans. Mechatron. 2013, 18, 355–365. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value | Specification | Value |
|---|---|---|---|
| Height | 10 cm | Length | 50 cm |
| Width | 10 cm | Weight | 200 g |
| Min. Stiffness | 32 Nm/rad | Rotation Range (Min. Stiffness) | +/−0.3 rad |
| Max. Stiffness | 350 Nm/rad | Rotation Range (Max. Stiffness) | +/−0.3 rad |
| Min. Deflection (Min. Stiffness) | 0.2 rad | Max. Torque | 3.2 Nm |
| Max. Deflection (Max. Stiffness) | 0.15 rad | Max. Velocity | 0.5 rad/s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.H.; Wahrmund, C.; Jafari, A. A Novel Mechanically Overdamped Actuator with Adjustable Stiffness (MOD-AwAS) for Safe Interaction and Accurate Positioning. Actuators 2017, 6, 22. https://doi.org/10.3390/act6030022
Lee JH, Wahrmund C, Jafari A. A Novel Mechanically Overdamped Actuator with Adjustable Stiffness (MOD-AwAS) for Safe Interaction and Accurate Positioning. Actuators. 2017; 6(3):22. https://doi.org/10.3390/act6030022
Chicago/Turabian StyleLee, Jae Hoon, Christian Wahrmund, and Amir Jafari. 2017. "A Novel Mechanically Overdamped Actuator with Adjustable Stiffness (MOD-AwAS) for Safe Interaction and Accurate Positioning" Actuators 6, no. 3: 22. https://doi.org/10.3390/act6030022
APA StyleLee, J. H., Wahrmund, C., & Jafari, A. (2017). A Novel Mechanically Overdamped Actuator with Adjustable Stiffness (MOD-AwAS) for Safe Interaction and Accurate Positioning. Actuators, 6(3), 22. https://doi.org/10.3390/act6030022