Control of Pneumatic Artificial Muscles Using Local Cyclic Inputs and Genetic Algorithm


Abstract
:
1. Introduction
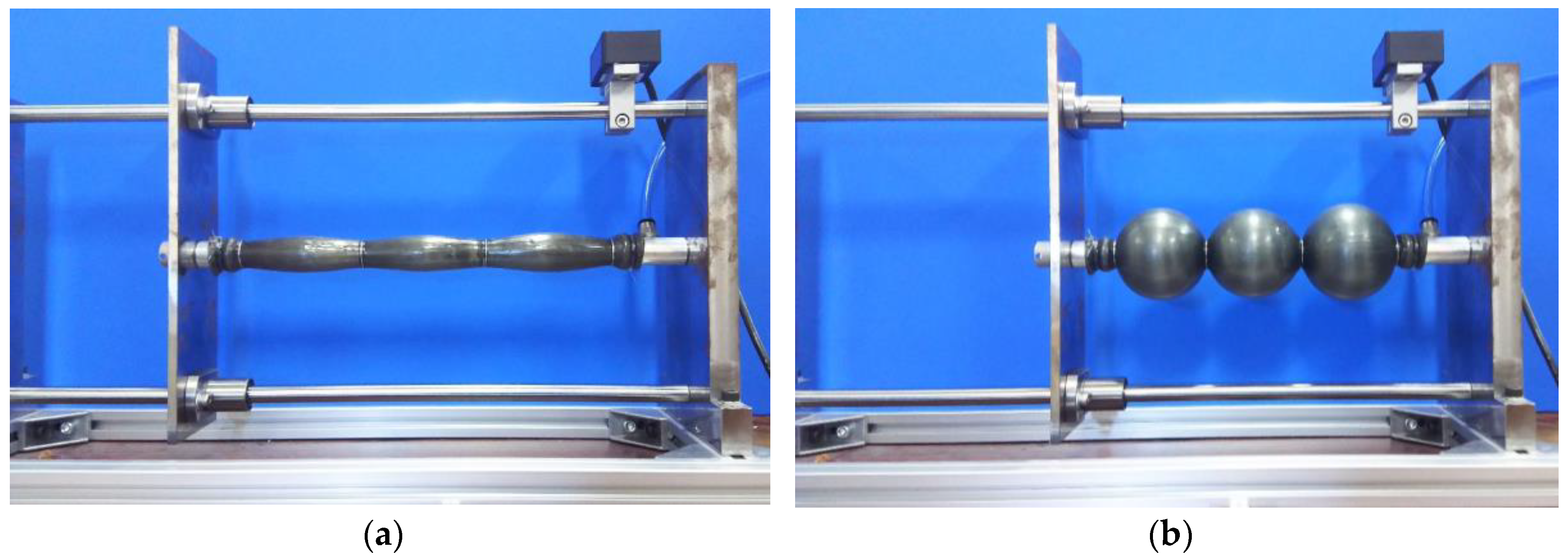
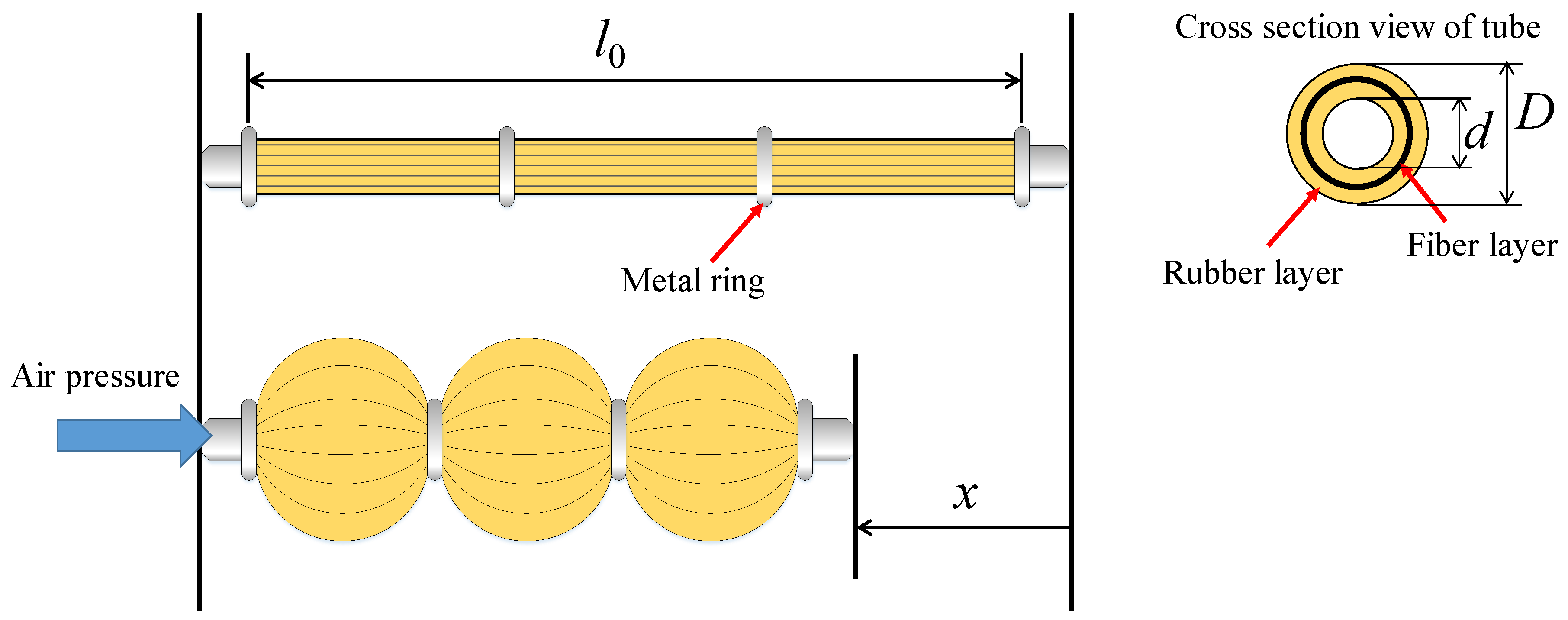
2. Straight-Fiber-Type Artificial Muscle
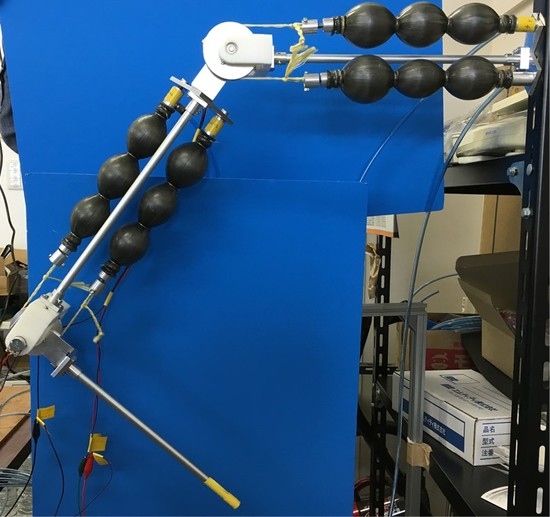
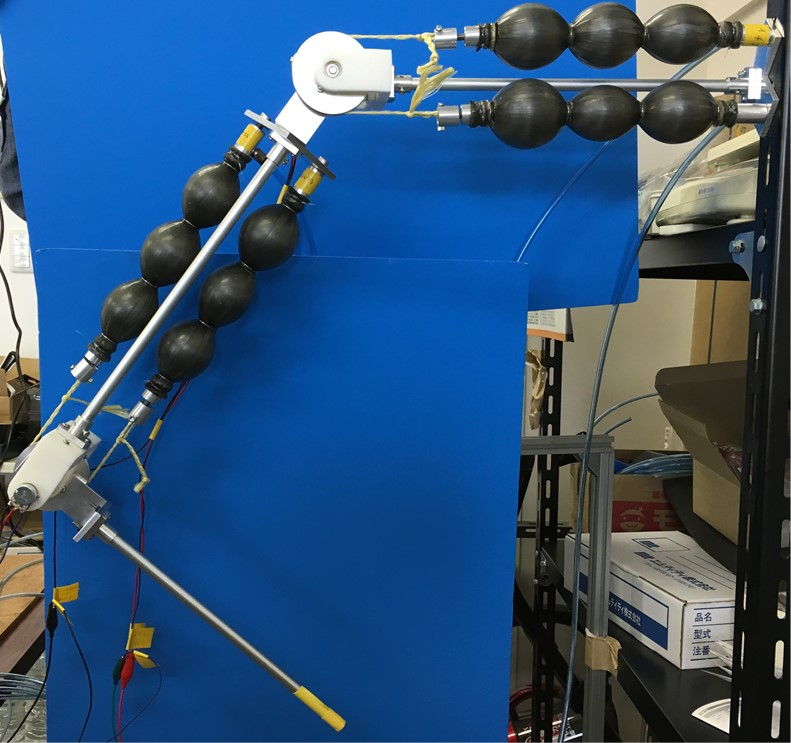
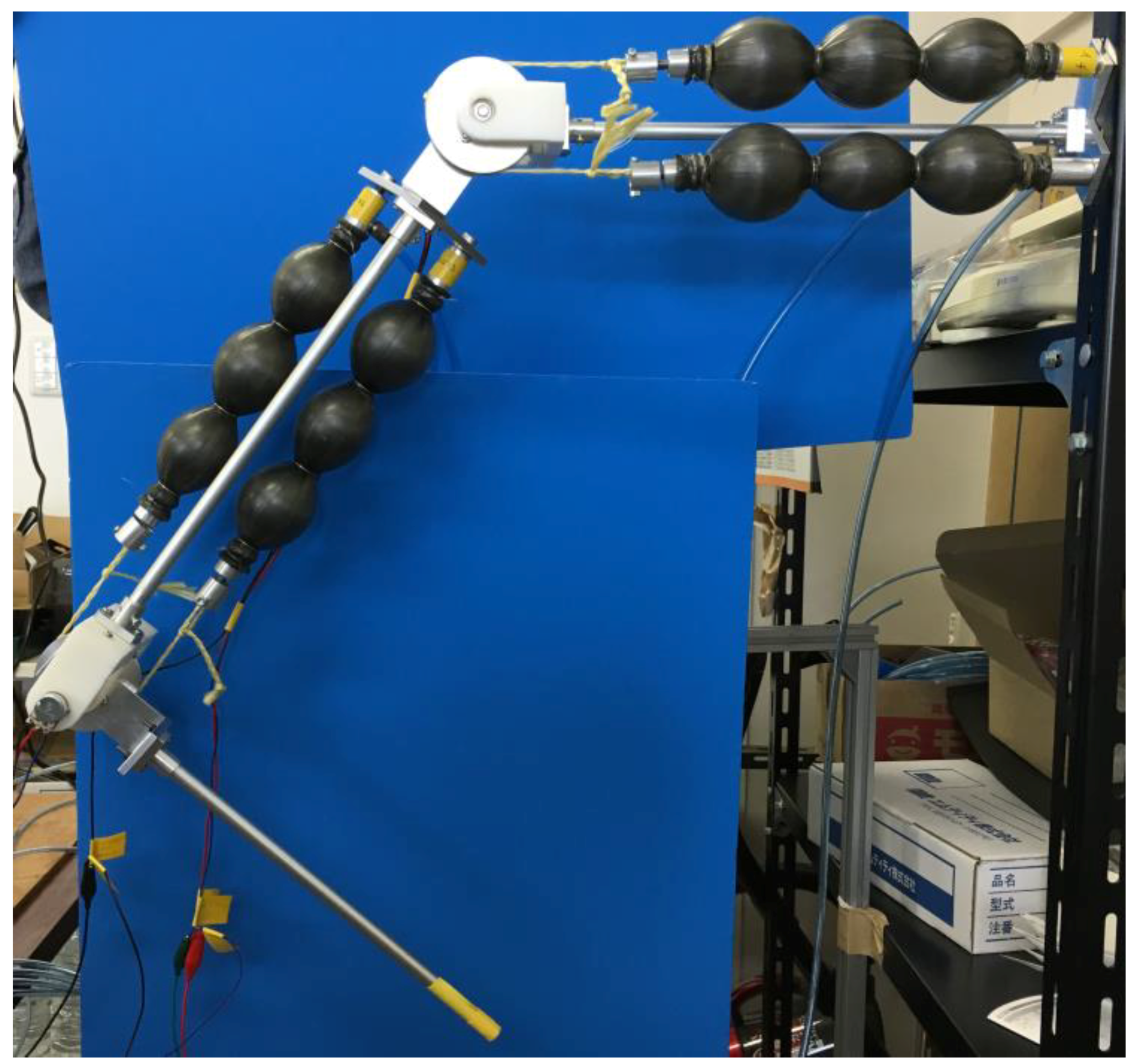
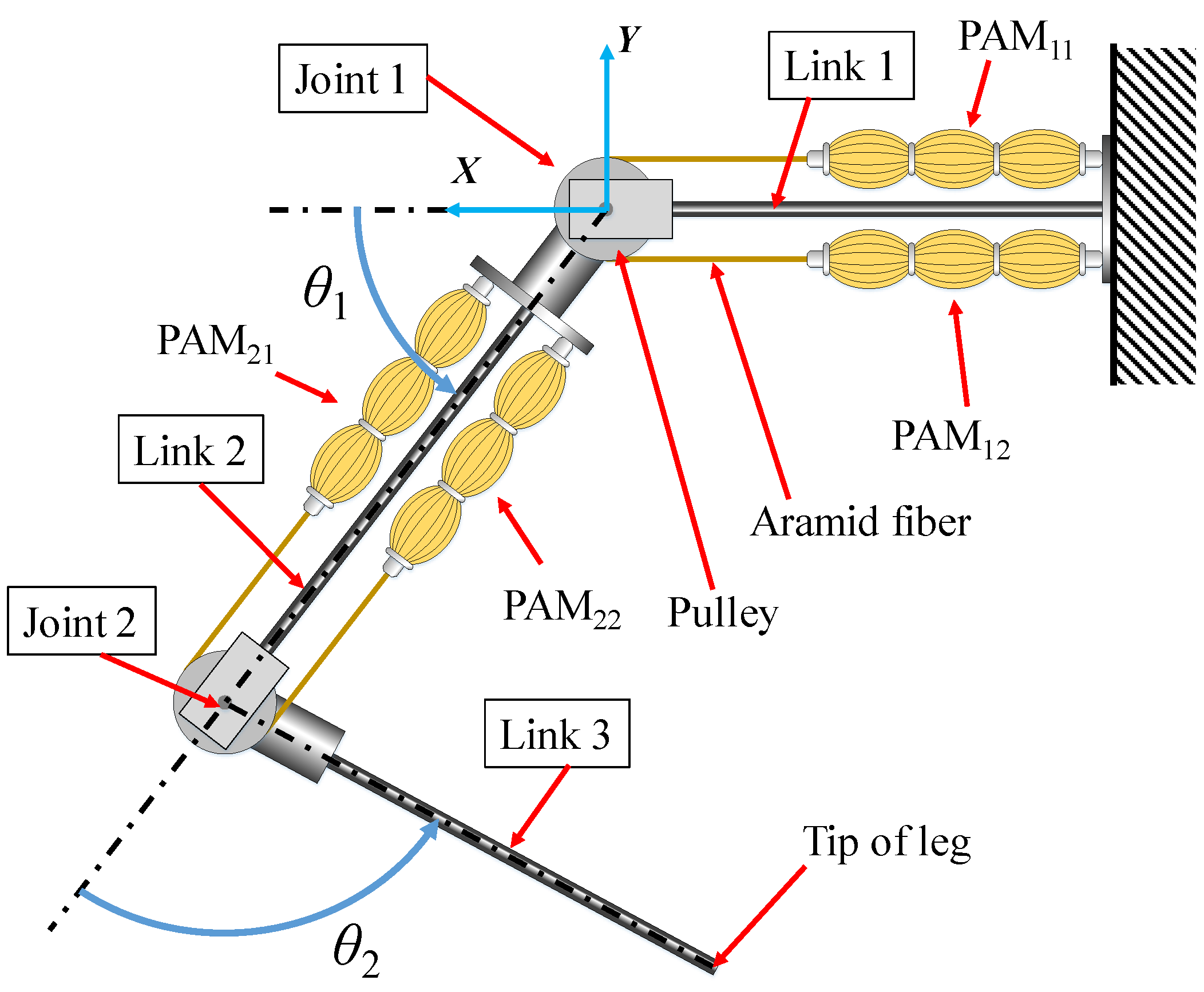
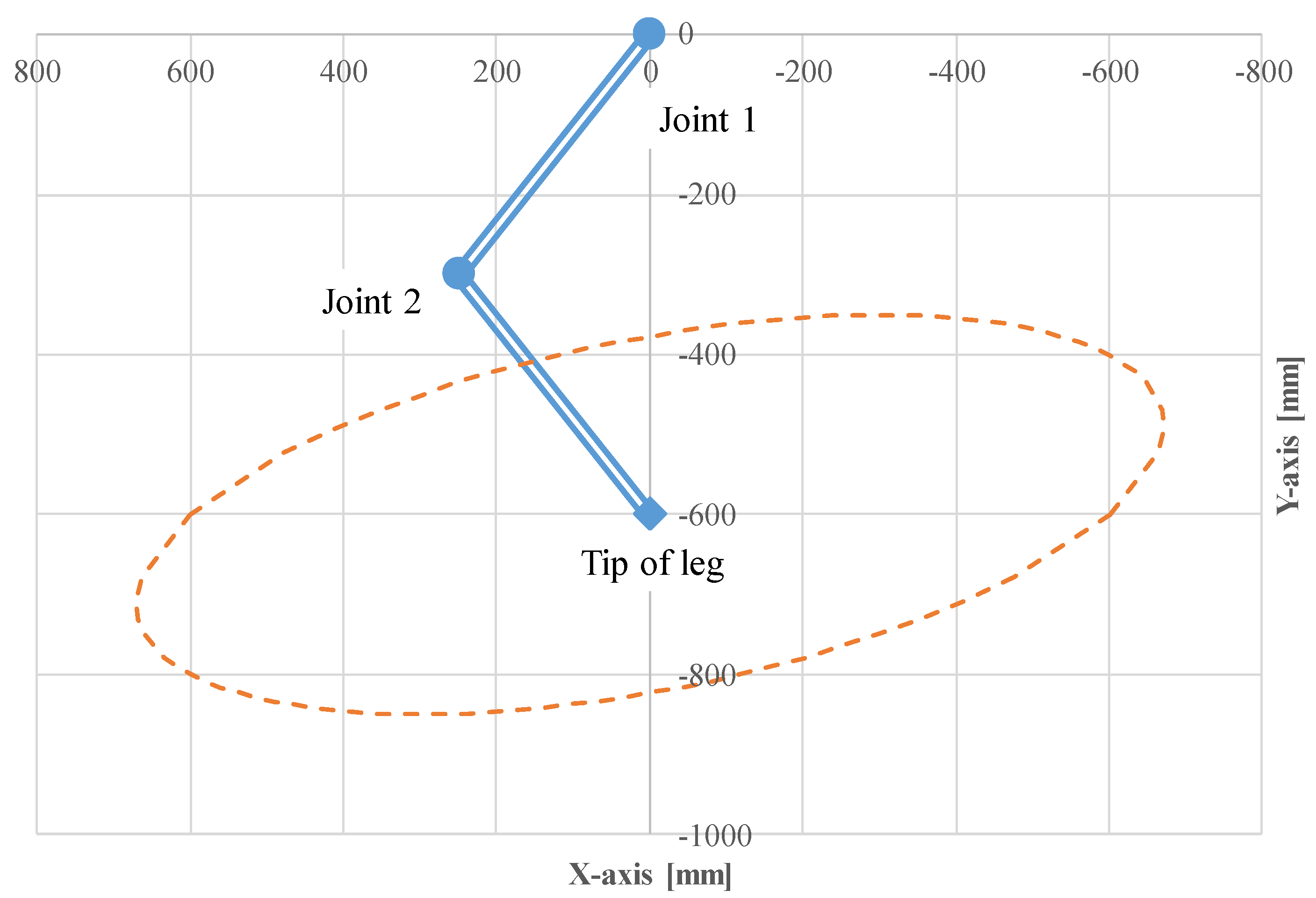
3. Single-Leg Robot with PAM
4. Controller Using Cyclic Input and Genetic Algorithm
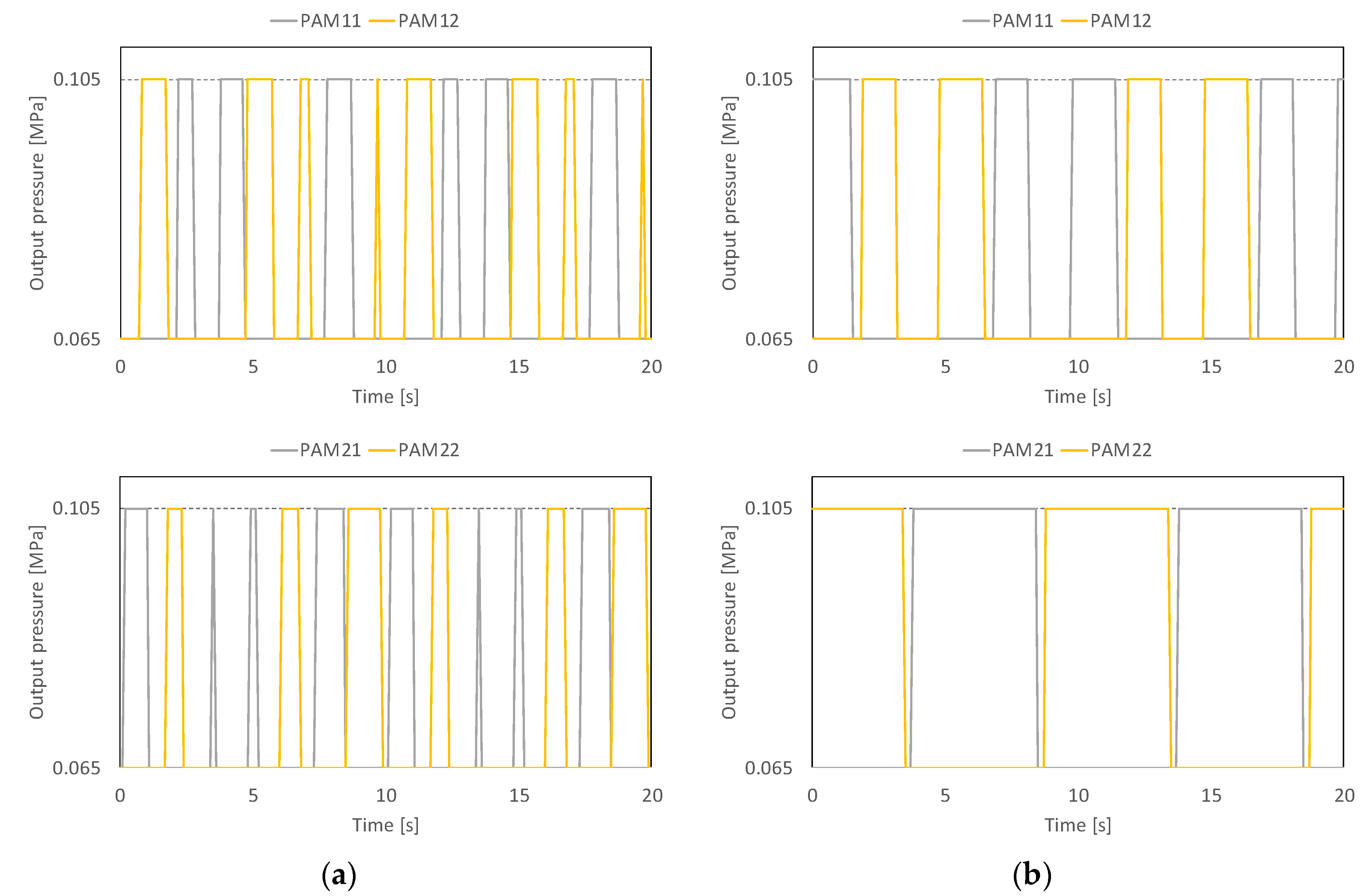
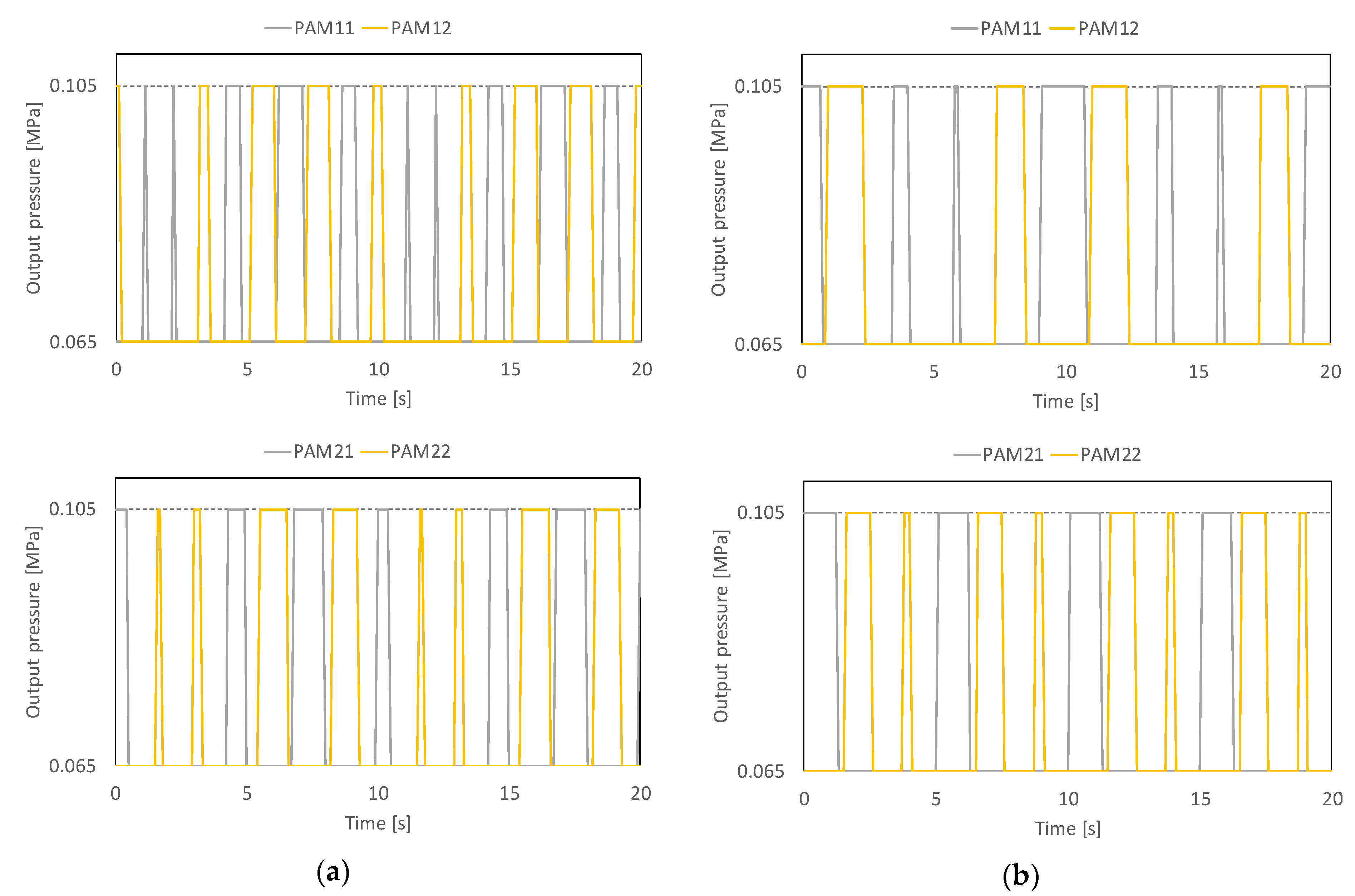
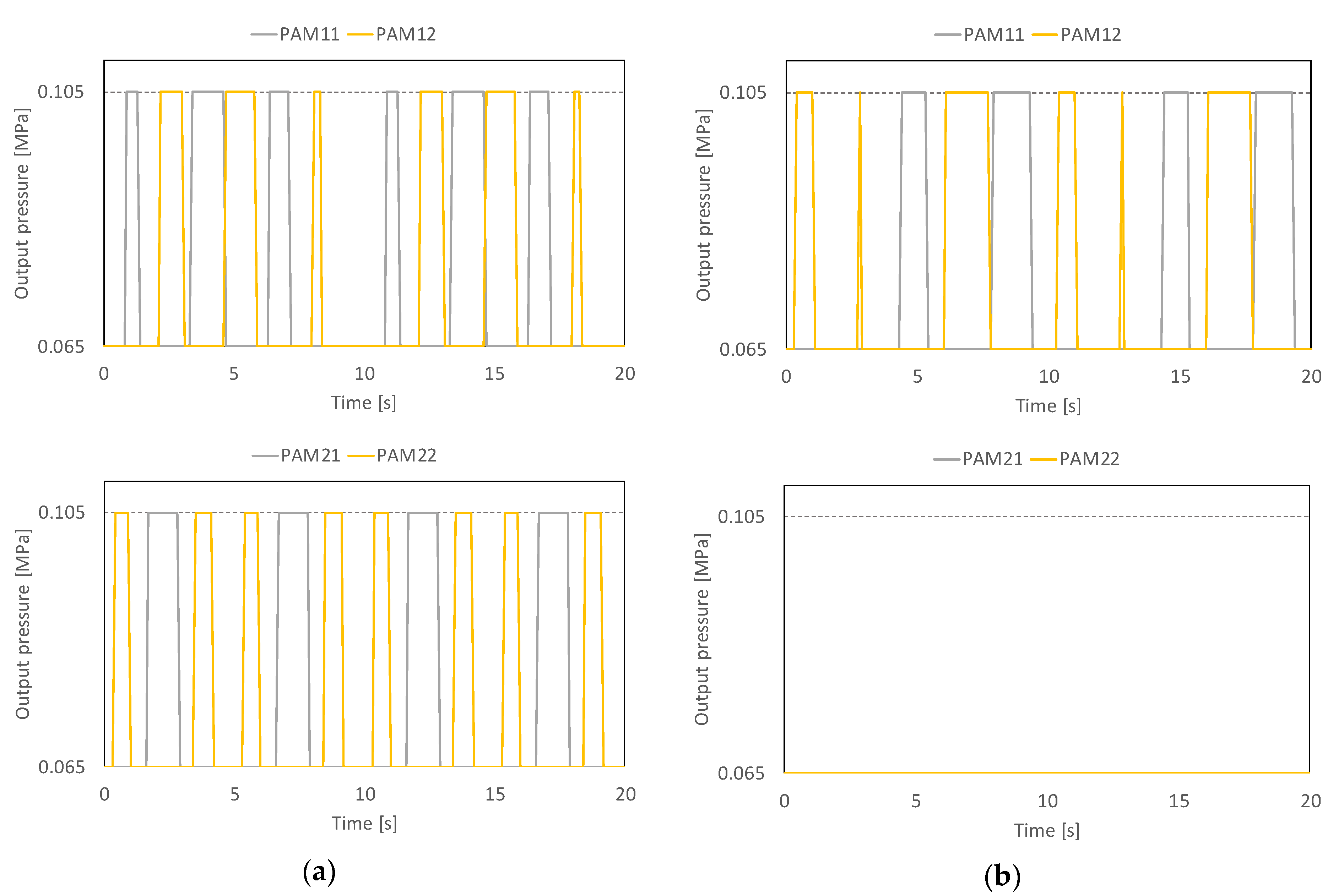
4.1. Cyclic Input Controller for PAM
4.2. Genetic Algorithm
- Initialize eight parameters of N genes at random in a fixed range (N is population number).
- Drive the robot using each gene.
- Evaluate the result of each motion with an evaluation function.
- Select the best gene as “gene A”.
- Select the next gene as “gene B” using roulette wheel selection.
- Cross gene A with gene B (crossover rate is 50% and mutation rate is 10%).
- These genes and gene A (elite gene) are set as the next generation, and this procedure is repeated from step 2.
5. Experiment
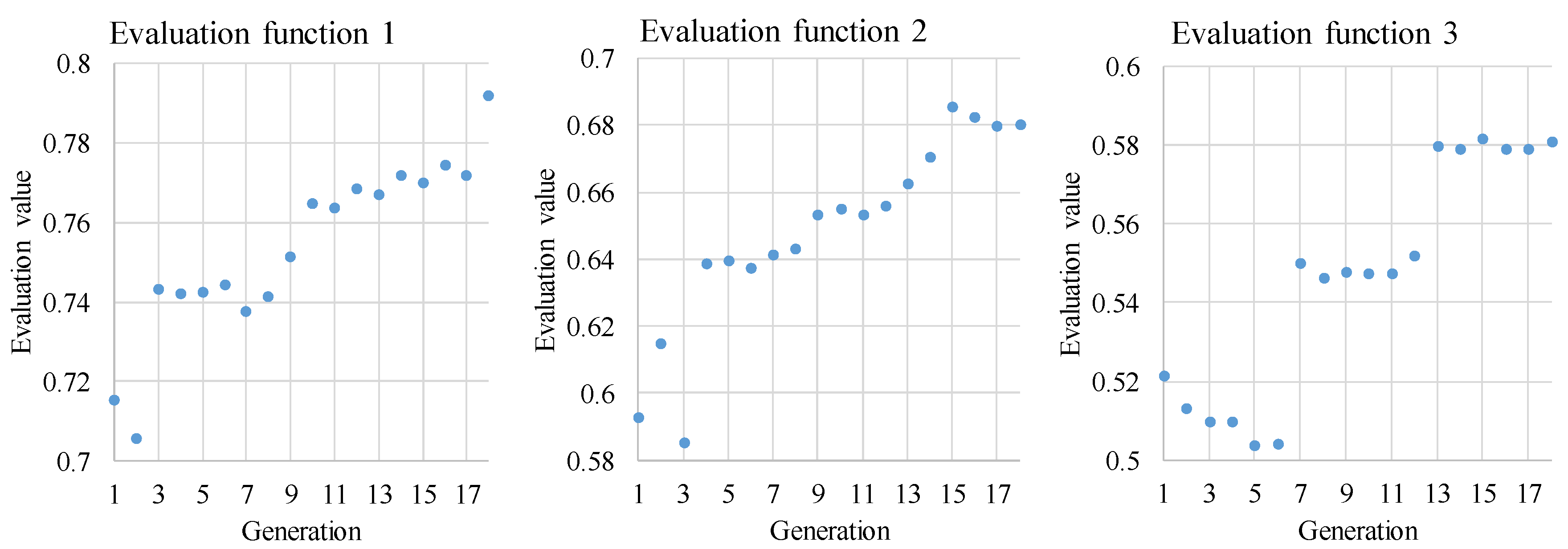
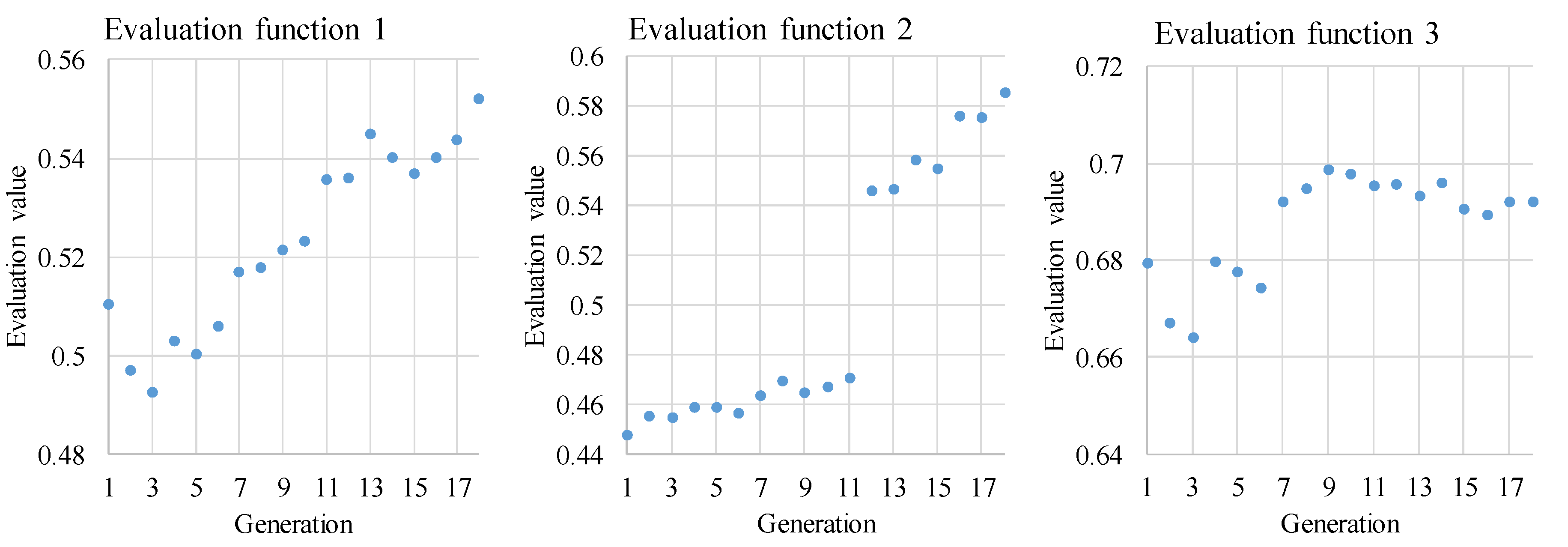
5.1. Evaluation Functions
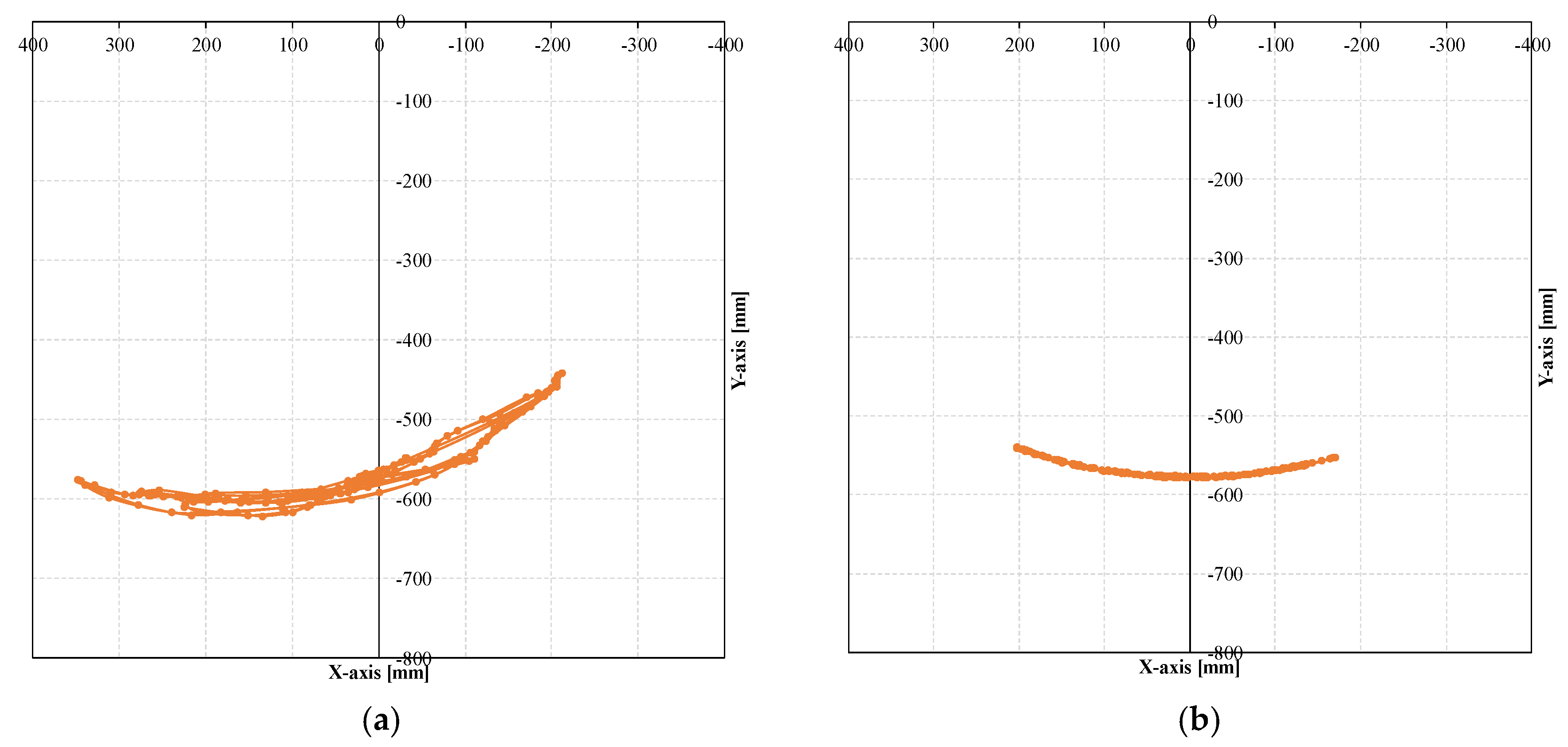
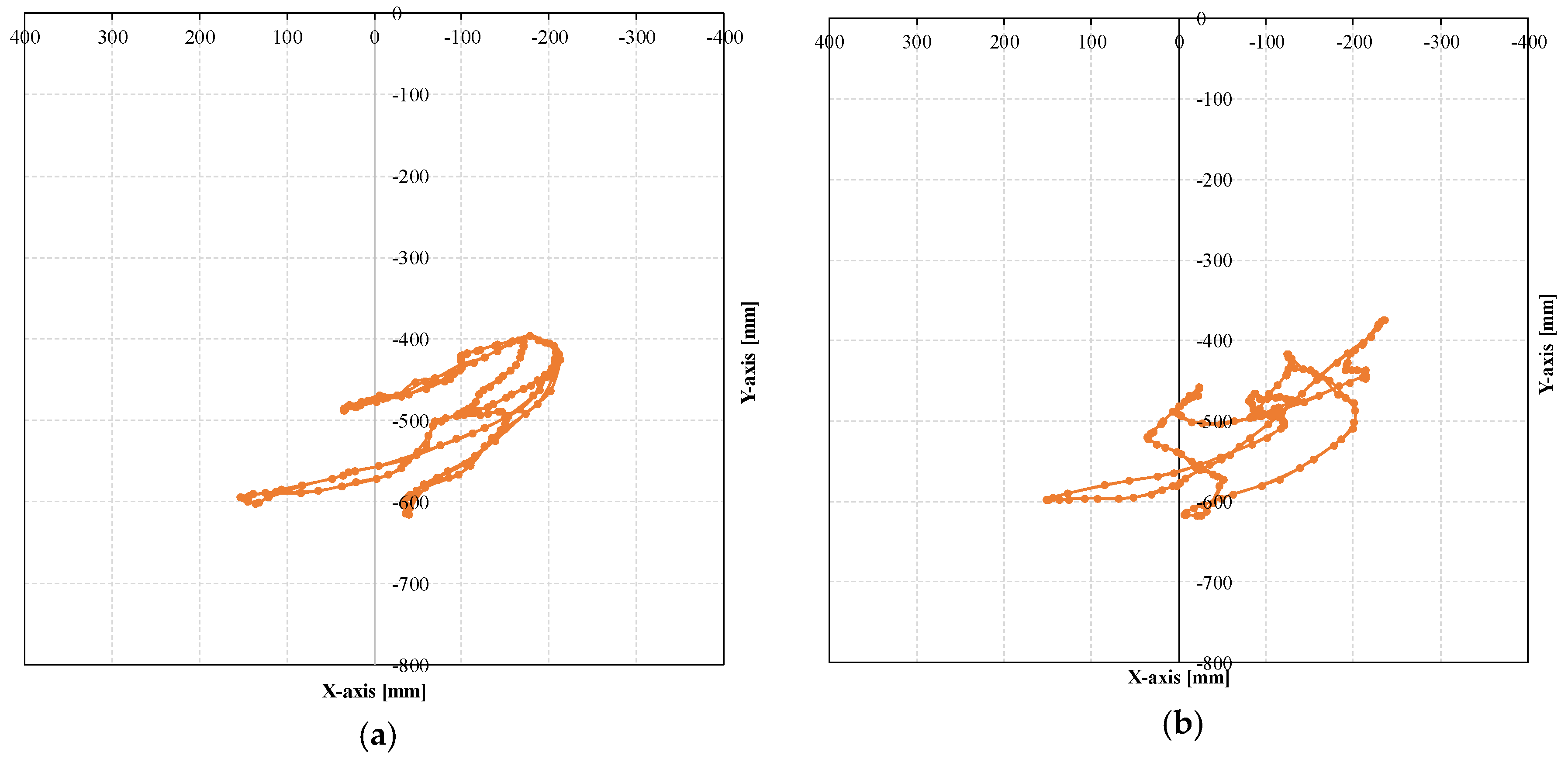
- Evaluation function 1 (Equation (4)) makes the trajectory of the leg tip expand horizontally and vertically (larger trajectory).
- Evaluation function 2 (Equation (5)) makes the trajectory of the leg tip expand horizontally and shrink vertically (horizontal swing).
- Evaluation function 3 (Equation (6)) makes the trajectory of the leg tip shrink horizontally and expand vertically (vertical swing).where X and Y are the widths of the trajectory in the horizontal and vertical directions, respectively, and Xmax and Ymax are the mechanistic maximum widths of the trajectory. Then, from C1 to C6 are weight coefficients. In this study, all of the weight coefficients are set at 0.5.
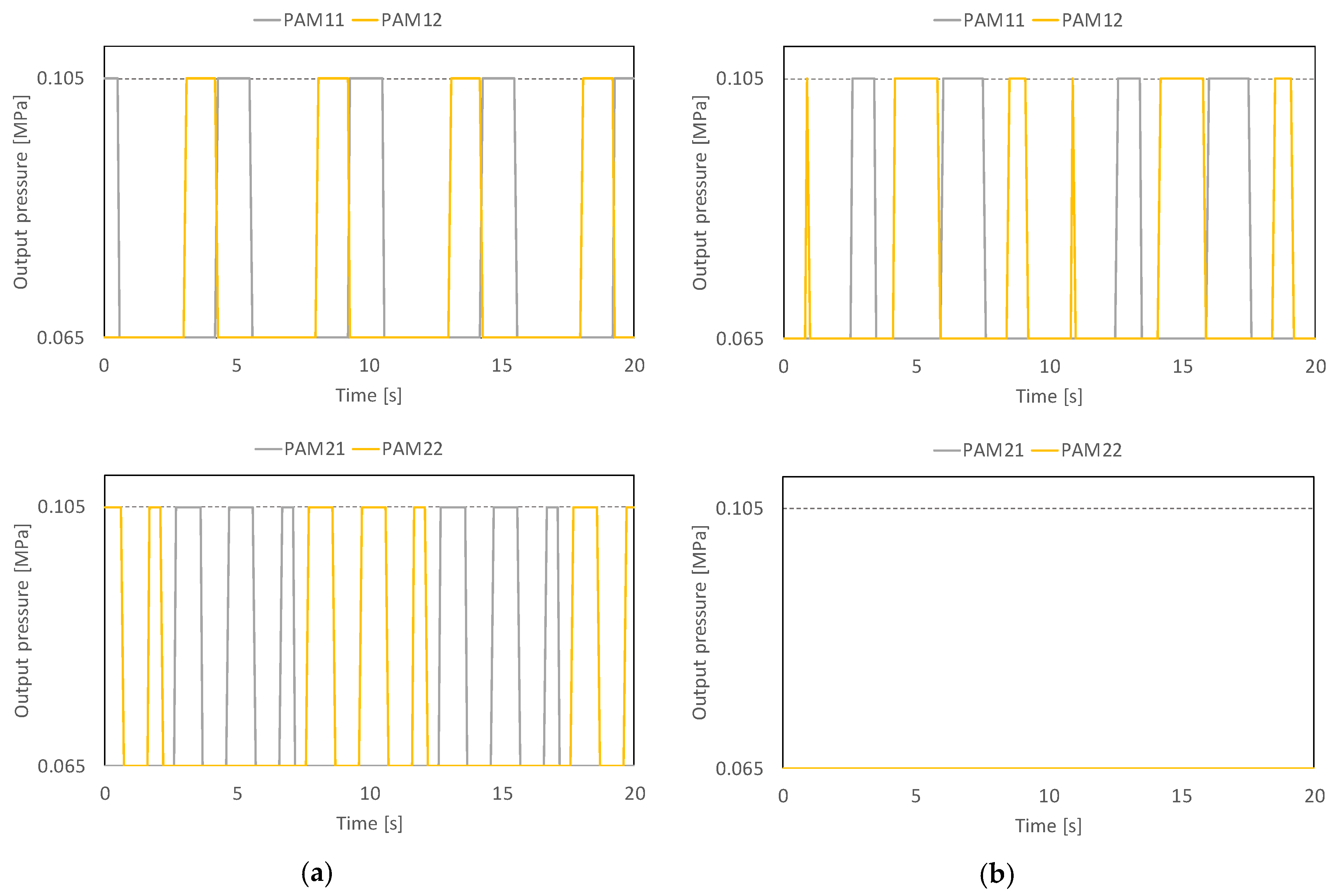
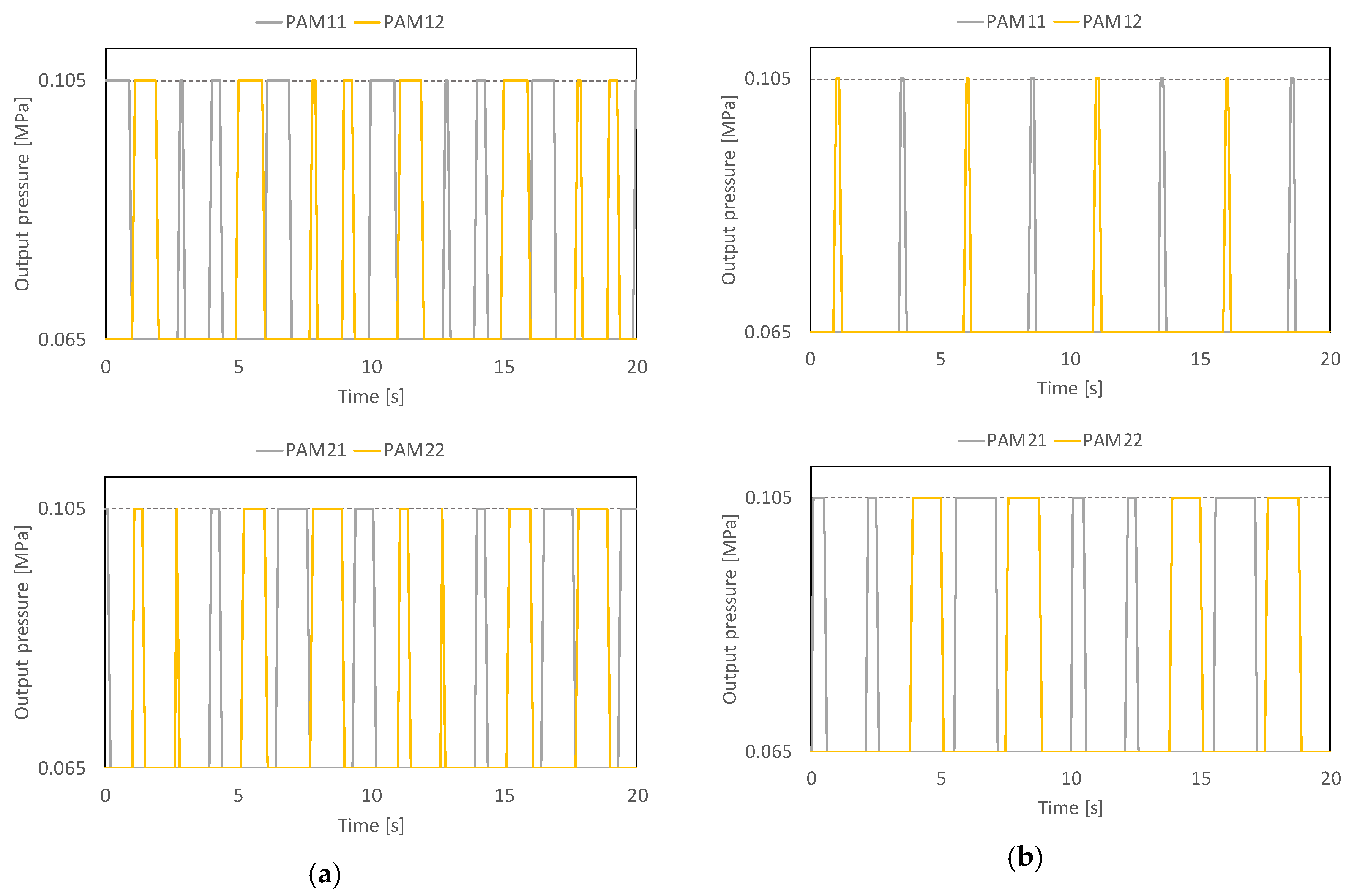
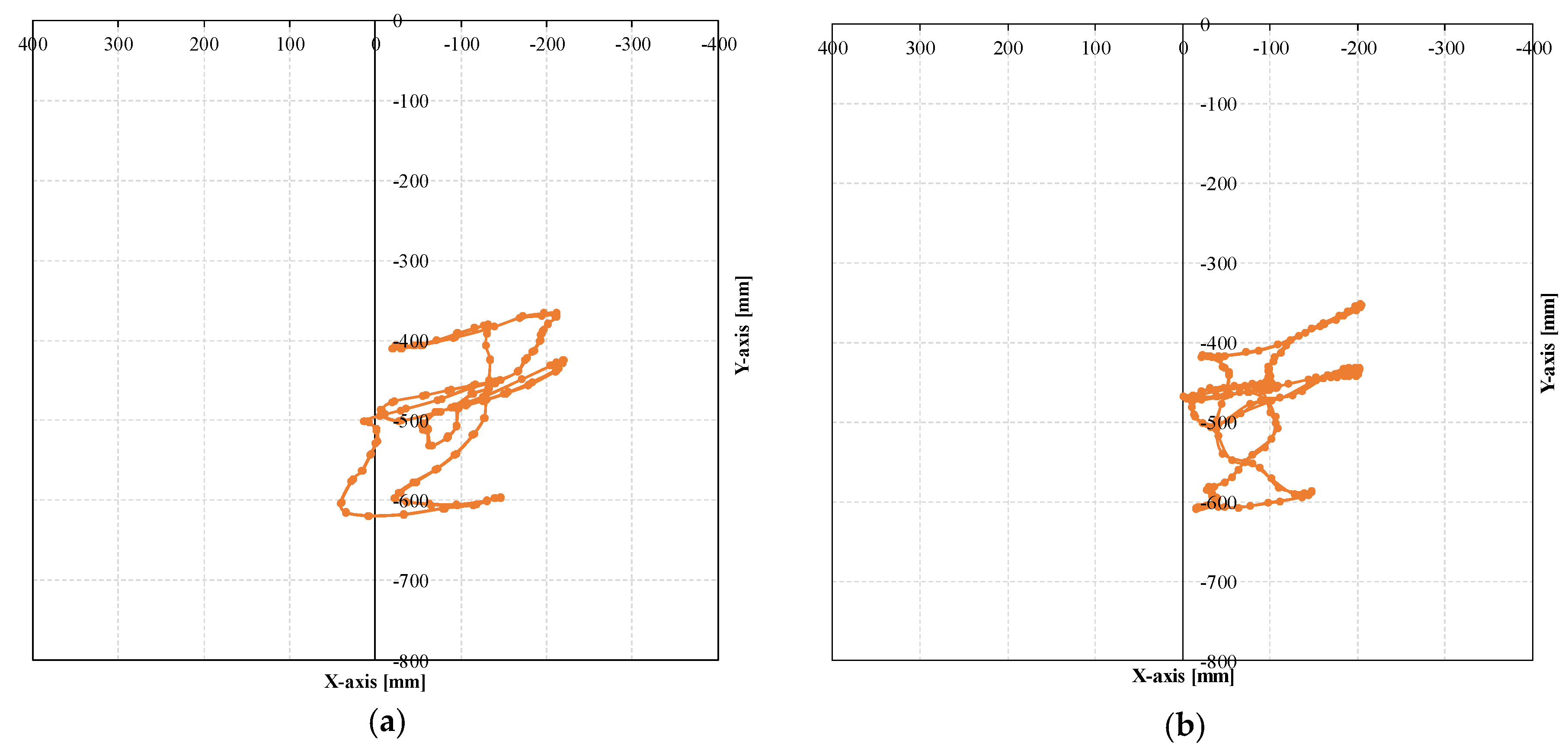
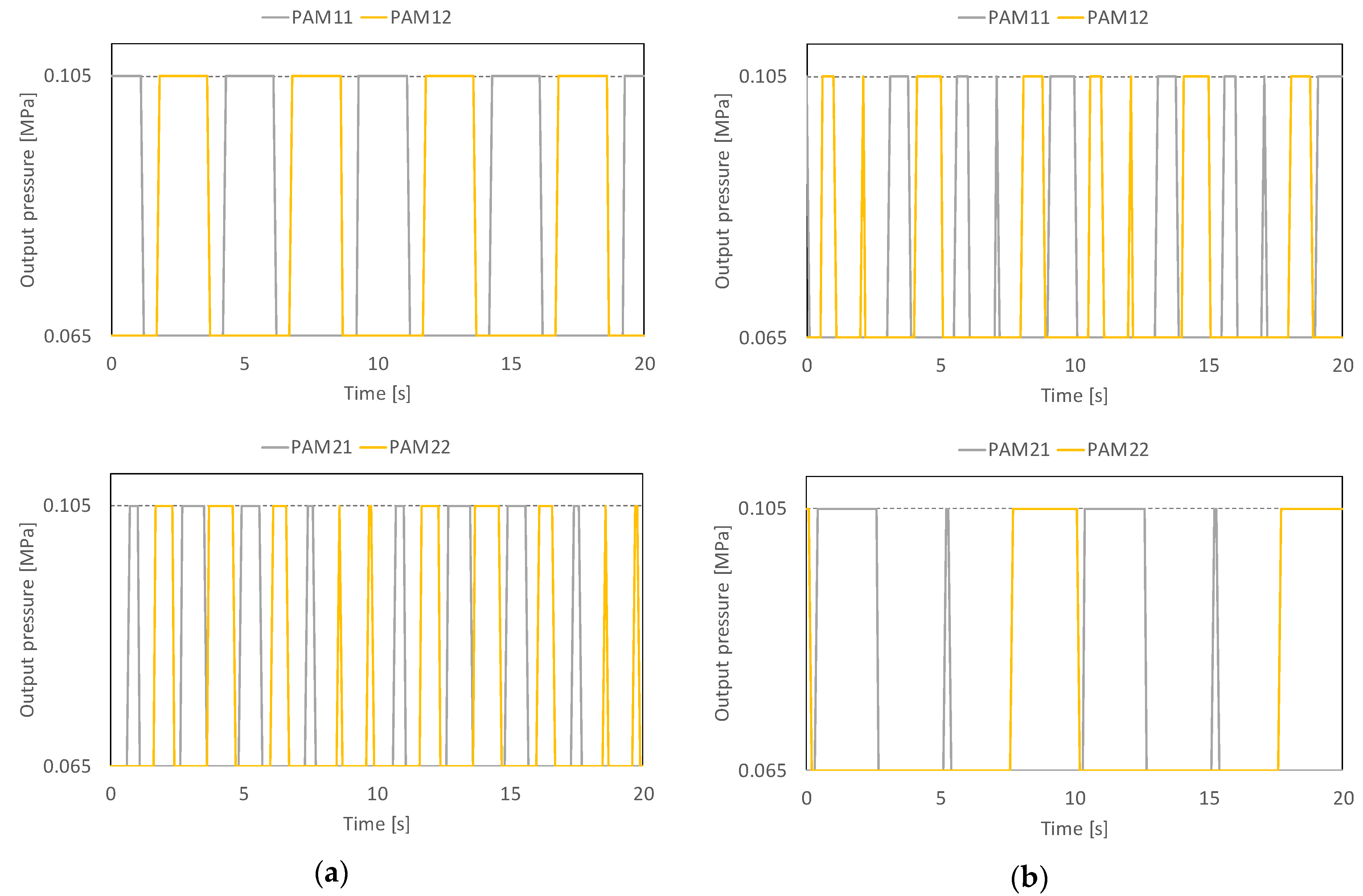
5.2. Demonstration of Driving the Leg Robot without Load
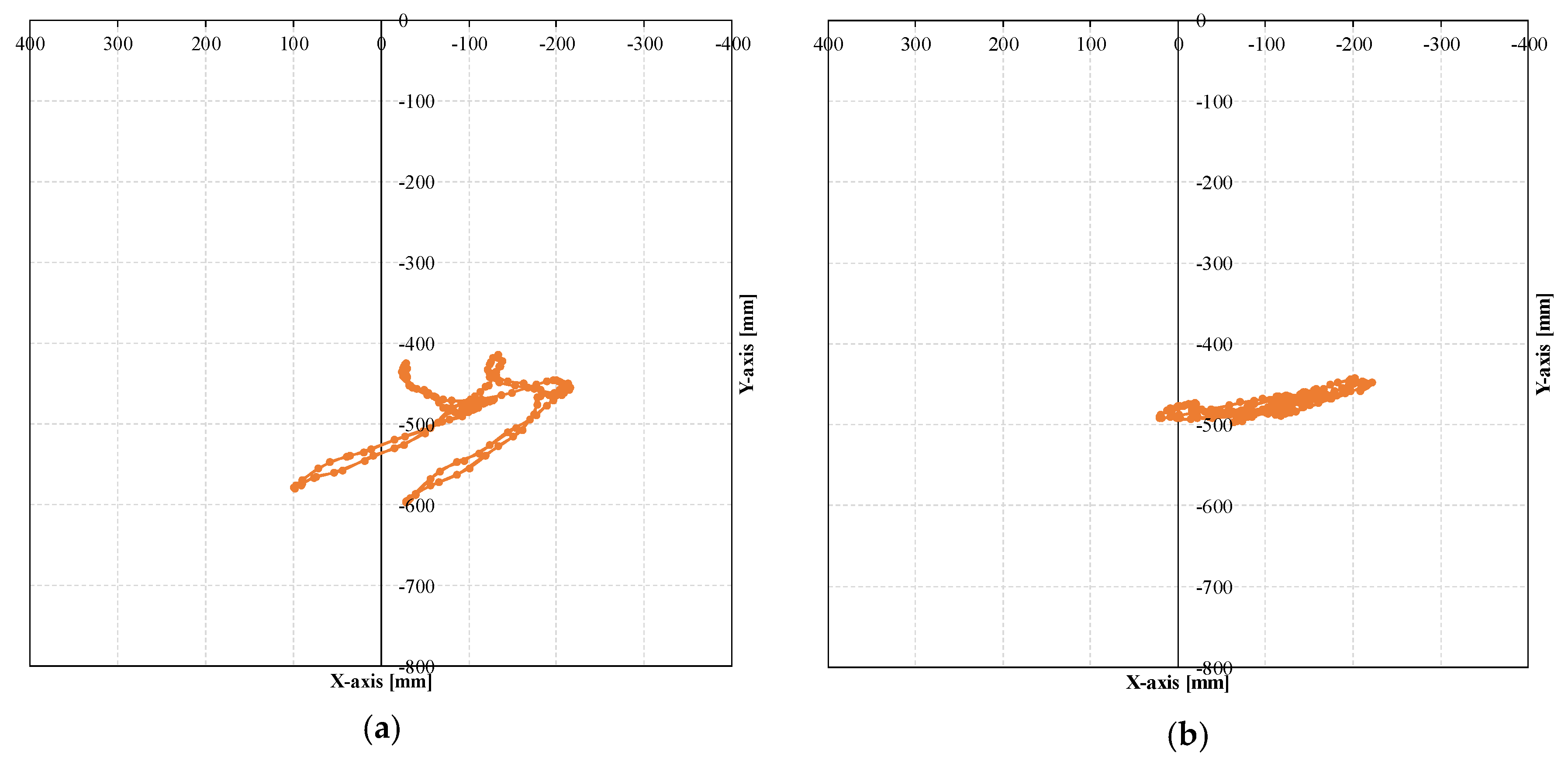
5.3. Demonstration of Driving the Leg Robot with Load
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Tomori, H.; Nakamura, T. Theoretical comparison of McKibben-type artificial muscle and novel straight-fiber-type artificial muscle. Int. J. Autom. Technol. 2011, 5, 544–550. [Google Scholar] [CrossRef]
- Nakamura, T. Experimental comparisons between McKibben type artificial muscles and straight fibers type artificial muscles. Proc. SPIE 2007, 6414, 641424. [Google Scholar] [CrossRef]
- Sasaki, D.; Noritsugu, T.; Takaiwa, M. Development of high contractile pneumatic artificial rubber muscle for power assist device. In The Abstracts of the International Conference on Advanced Mechatronics: Toward Evolutionary Fusion of IT and Mechatronics: ICAM; The Japan Society of Mechanical Engineers: Tokyo, Japan, 2010; Volume 5, pp. 774–779. [Google Scholar]
- More, M.; Liska, O.; Kovac, J. Experimental verification of force feedback for rehabilitation robot. Int. J. Eng. Res. Afr. 2015, 18, 123–129. [Google Scholar] [CrossRef]
- Nakamura, T.; Shinohara, H. Position and force control based on mathematical models of pneumatic artificial muscles reinforced by straight glass fibers. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2007), Roma, Italy, 10–14 April 2007; pp. 4361–4366. [Google Scholar]
- Nakamura, T.; Midorikawa, Y.; Tomori, H. Position and vibration control of variable rheological joints using artificial muscles and magneto-rheological brake. Int. J. Humanoid Robot. 2011, 8, 205–222. [Google Scholar] [CrossRef]
- Ba, D.X.; Ahn, K.K. A robust time-delay nonlinear controller for a pneumatic artificial muscle. Int. J. Precis. Eng. Manuf. 2018, 19, 23–30. [Google Scholar] [CrossRef]
- Aschemann, H.; Schindele, D. Comparison of model-based approaches to the compensation of hysteresis in the force characteristic of pneumatic muscles. IEEE Trans. Ind. Electron. 2014, 61, 3620–3629. [Google Scholar] [CrossRef]
- Lin, C.J.; Lin, C.R.; Yu, S.K.; Chen, C.T. Hysteresis modeling and tracking control for a dual pneumatic artificial muscle system using Prandtl–Ishlinskii model. Mechatronics 2015, 28, 35–45. [Google Scholar] [CrossRef]
- Xiea, S.L.; Liua, H.T.; Meia, J.P.; Gub, G.Y. Modeling and compensation of asymmetric hysteresis for pneumatic artificial muscles with a modified generalized Prandtl–Ishlinskii model. Mechatronics 2018, 52, 49–57. [Google Scholar] [CrossRef]
- Song, C.; Xie, S.Q.; Zhou, Z.; Hu, Y. Modeling of pneumatic artificial muscle using a hybrid artificial neural network approach. Mechatronics 2015, 31, 124–131. [Google Scholar] [CrossRef]
- Anh, H.P.H.; Ahn, K.K. Identification of pneumatic artificial muscle manipulators by a MGA-based nonlinear NARX fuzzy model. Mechatronics 2009, 19, 106–133. [Google Scholar] [CrossRef]
- Owaki, D.; Kano, T.; Nagasawa, K.; Tero, A.; Ishiguro, A. Simple robot suggests physical interlimb communication is essential for quadruped walking. J. R. Soc. Interface 2013, 10. [Google Scholar] [CrossRef] [PubMed]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Range of θ1 [°] | 40~80 |
| Range of θ2 [°] | 50~90 |
| Weight [kg] | 0.886 |
| Length of Link 1 [mm] | 355 |
| Length of Link 2 [mm] | 390 |
| Length of Link 3 [mm] | 390 |
| Condition | |
|---|---|
| Range of frequency ω [Hz] | 0.1~0.5 |
| Increment of ω [Hz] | 0.1 |
| Range of phase sifting φ [rad] | 50~90 |
| Increment of φ [rad] | π/16 |
| Number of parameters at one gene | 8 |
| Population number | 12 |
| Number of generations for searching | 18 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomori, H.; Hiyoshi, K. Control of Pneumatic Artificial Muscles Using Local Cyclic Inputs and Genetic Algorithm. Actuators 2018, 7, 36. https://doi.org/10.3390/act7030036
Tomori H, Hiyoshi K. Control of Pneumatic Artificial Muscles Using Local Cyclic Inputs and Genetic Algorithm. Actuators. 2018; 7(3):36. https://doi.org/10.3390/act7030036
Chicago/Turabian StyleTomori, Hiroki, and Kenta Hiyoshi. 2018. "Control of Pneumatic Artificial Muscles Using Local Cyclic Inputs and Genetic Algorithm" Actuators 7, no. 3: 36. https://doi.org/10.3390/act7030036
APA StyleTomori, H., & Hiyoshi, K. (2018). Control of Pneumatic Artificial Muscles Using Local Cyclic Inputs and Genetic Algorithm. Actuators, 7(3), 36. https://doi.org/10.3390/act7030036