1. Introduction
Piezoelectric actuators are widely used both in industries and in consumer appliances because of their advantages in size, fine positioning capability, and quick response characteristics. Examples of their application include the nanopositioning stage of the atomic force microscope (AFM) [
1], HDD head positioning [
2], and the actuation of a micro-robot [
3]. However, it is well-known to the researchers and practitioners in the field that hysteresis is observed in the response of the piezoelectric actuator to its inputs, and the positioning accuracy is severely deteriorated if no appropriate compensation is given. Great efforts have hence been devoted to the modeling and compensation of hysteresis.
Many mathematical models have been developed to capture the behavior of the hysteresis nonlinearity. Most of the models are phenomenological in the sense that the structure of the models are not necessarily physically motivated, but determined to numerically represent the behavior as precisely as possible. The phenomenological hysteresis models proposed to-date include the Preisach model and its extensions [
4,
5], the Prandtl–Ishlinskii model [
6], and the Bouc–Wen model [
7].
Among the models stated in the previous paragraph, the Bouc–Wen model has attracted great attention from researchers because of its mathematical simplicity, and the model has been used extensively in both the modeling and compensation of various hysteresis-related phenomena. Rakotondrabe [
8] proposed a control system to compensate hysteresis nonlinearity using the Bouc–Wen model. His work can be classified as feedforward control in the control engineering context. His excellent contribution owes its theoretical basis to the structure of the Bouc–Wen model, and there is no need to synthesize the inverse hysteresis model to cancel the hysteresis. The authors of the current paper recently proposed an extension of the Bouc–Wen model [
9] to capture the behavior of a thin bimorph-type piezoelectric actuator which exhibits frequency-dependent hysteresis, and synthesized a compensator based on the idea proposed by Rakotondrabe. Hadineza et al. [
10] formulated the multi-variable generalized Bouc–Wen model and used it in the control of their experimental plant, in which multiple piezoelectric actuators are installed.
Recently, Li et al. [
11] reported the existence of a special form of frequency-dependent hysteresis nonlinearity in their piezo-driven nanopositioning stage which is referred to as the odd harmonic oscillation (OHO). We have also observed the odd harmonic oscillation with our bimorph piezoelectric actuator (e.g., the response to a 23 Hz pure sinusoidal input shown in Figure 18 [
9]). Li clearly stated that the odd harmonic oscillation is caused by the hysteresis nonlinearity of the piezoelectric actuator, but they treated it as a disturbance and synthesized an odd harmonic repetitive controller to attenuate the odd harmonic oscillation. We are highly motivated by the work of Li et al., as we believe that attenuation of the odd harmonic oscillation can be treated in the course of model-based hysteresis compensation. The present paper accordingly addresses the results of our effort on modeling the frequency-dependent hysteresis of a thin bimorph piezoelectric actuator which also exhibits OHO. We will hereafter refer to the model proposed in this paper as the enhanced Bouc–Wen model.
We will also propose a controller design based on the enhanced Bouc–Wen model which compensates the hysteresis nonlinearity and attenuates the adherent OHO. The proposed controller has a combined feedforward (FF) and feedback (FB) architecture. Many foregoing works can be found in the literature which employ the FF + FB architecture to control the piezoelectric actuator. This architecture is classified as a two degrees of freedom (2 d.o.f.) control system in the control engineering context. Many preceding works which use the 2 d.o.f. controller assign the role of hysteresis compensation to the feedforward controller and the accompanied feedback controller is synthesized to compensate the inaccuracy, uncertainties, or to provide performance enhancement [
12]. Examples of this type include the works by Xu and Li [
13] and Li et al. [
14].
There are also works which utilize the feedforward controller for an objective other than hysteresis compensation. A prime example can be found in the works by Rakotondrabe et al. [
15,
16], in which ZV input shaping [
17] is adopted to synthesize feedforward control input for vibration suppression of their 2-d.o.f. piezocantilever. The ZV input shaping technique generates a command signal sequence which includes several impulse inputs. However, as it is a feedforward control method, it requires parameter identification prior to the command signal calculation, and the control performance will be deteriorated when only inaccurate system parameters are available. This paper proposes a controller to attenuate the unwanted odd harmonic oscillation. It can be said that the proposed control method for the attenuation of odd harmonic oscillation is an enhancement of ZV input shaping using feedback.
This paper is organized as follows.
Section 2 states the derivation of the enhanced Bouc–Wen model and details the development to introduce the inherent odd harmonic oscillation of a piezoelectric actuator into the model. The procedure for the identification of the proposed enhanced Bouc–Wen model is also addressed in the section.
Section 3 dictates the identification experiment and its results.
Section 4 describes the details of the hysteresis compensator design which simultaneously attenuates the odd harmonic oscillation.
Section 5 illustrates the results of the hysteresis compensation experiment, and conclusions are drawn in
Section 6.
3. Identification Experiment
A parameter identification experiment and a numerical validation of the identified model were conducted to claim the high modeling accuracy of the proposed enhanced Bouc–Wen model (
6) and (
7).
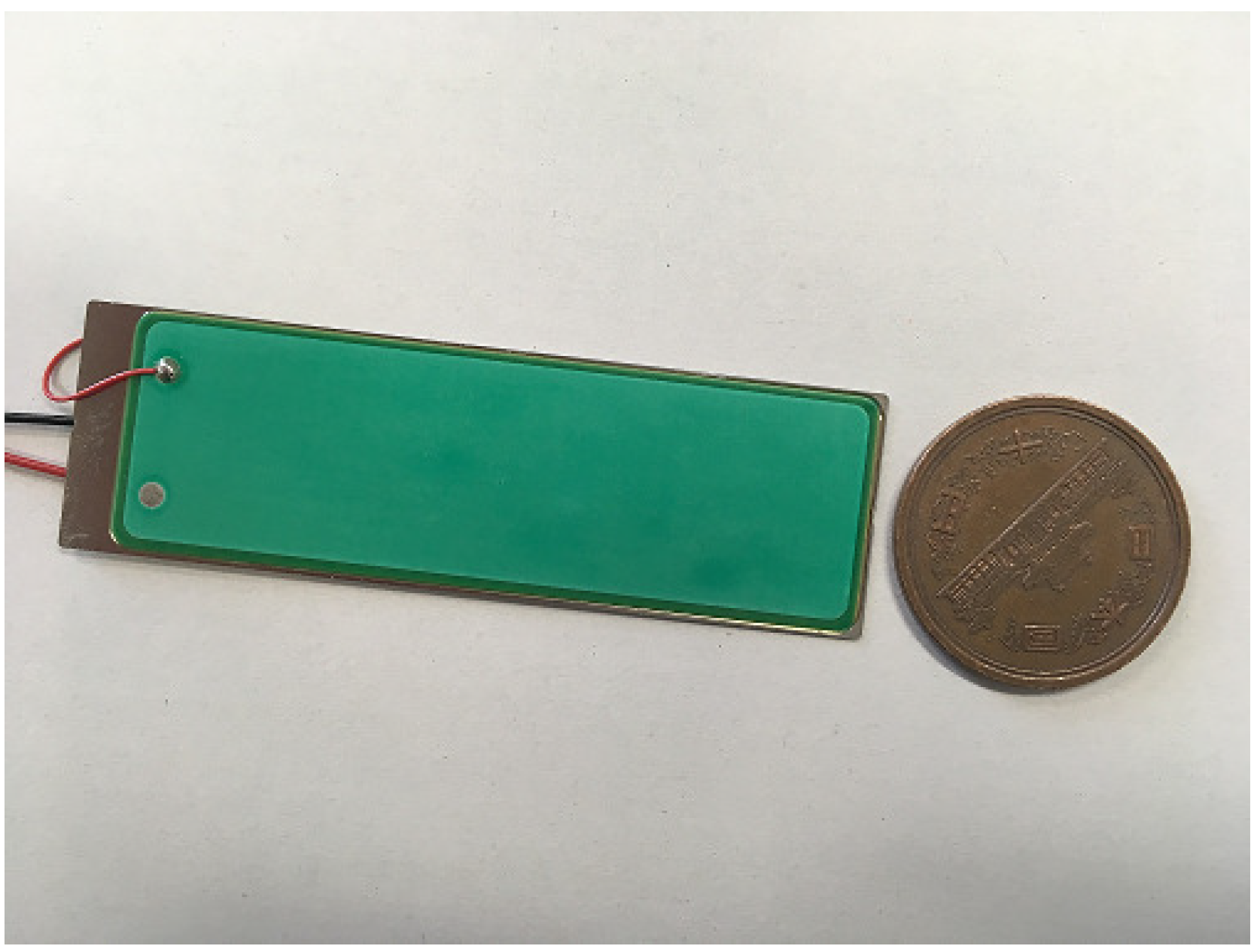
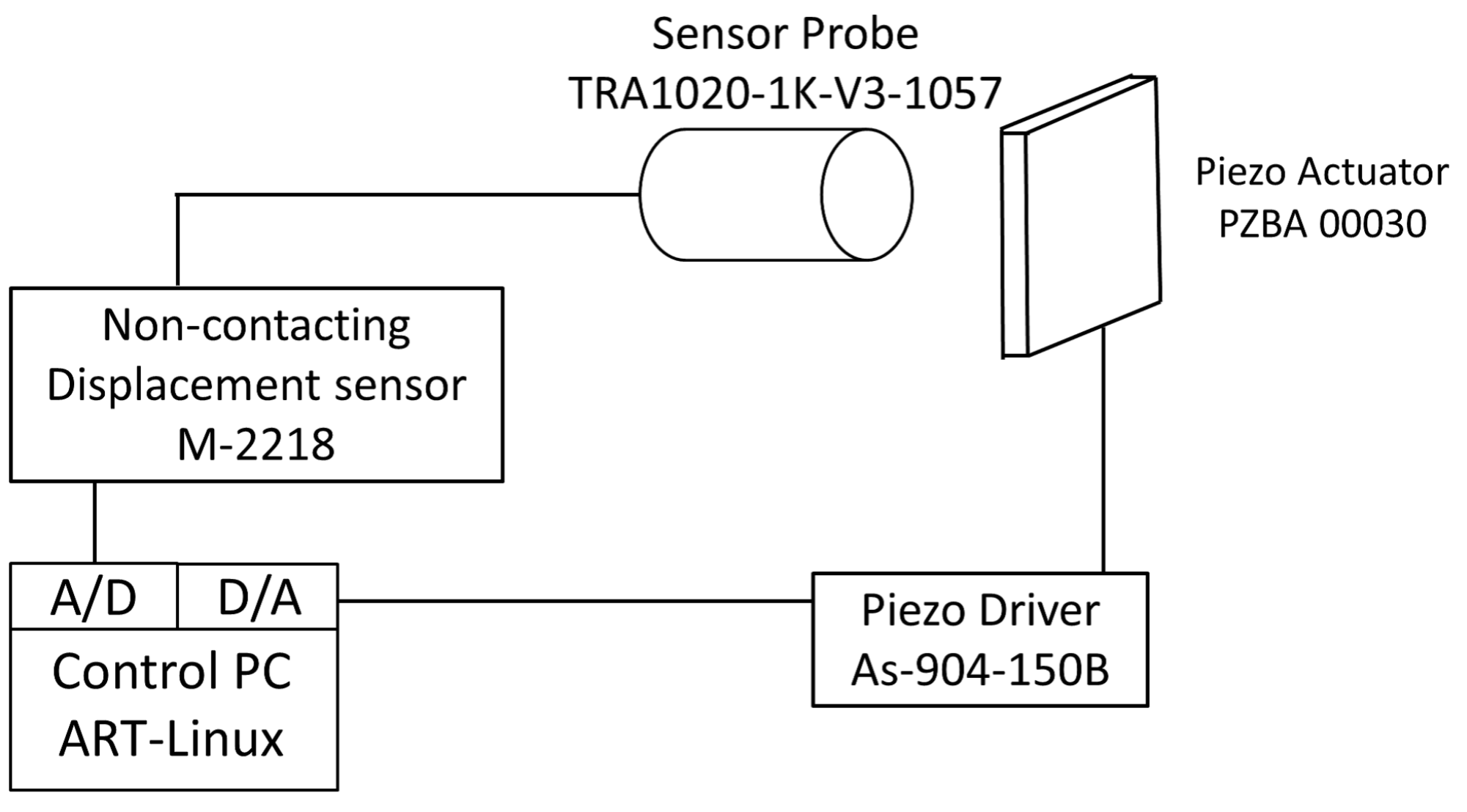
Figure 9 shows the measurement setup. A pure sinusoidal input
was calculated by the PC driven by the 3.2 GHz CPU (AMD, phenomX4 955, Santa Clara, CA, USA) and fed to the piezoelectric actuator via D/A converter (Interface, LPC-361116, Hiroshima, Japan) and a bipolar piezo driver (NF, As-904-150B, Yokohama, Japan) in
Figure 9. The PC worked with the realtime operating system ART-Linux with a sampling interval of 1 ms. A capacitance-type displacement sensor (MESS-TEK, M-2218, Wako, Japan) together with a probe (MESS-TEK, TRA10251K-V3) were used to measure the displacement of the actuator. This sensor probe had a measurement resolution of 10 nm.
In the experiment, a single measurement corresponding to a single frequency
f lasted for 100 s. The RLS algorithm was used for parameter fitting as mentioned in the previous section. The initial value of
was set to 0 and the auto-correlation matrix was set to be the identity matrix
. Four of the parameters
and
were given the initial values of 0.01, 0.005, 0.001, and 0.001, respectively. The remaining parameters were set to 0. The experiment was repeated 50 times while altering the input frequency from 1 to 50 Hz for every 1 Hz. We used the third harmonic model (
6) for frequencies from 18 to 28 Hz and the fifth harmonic model (
7) for 14 Hz sinusoidal input in the frequency range of interest, as we empirically know that the fifth-order harmonic oscillation is observed at
Hz and the third-order harmonic oscillation appears around
Hz. It should be mentioned here that there was no difference between the extended Bouc–Wen model and the enhanced Bouc–Wen model (
6) or (
7) at the remaining frequencies.
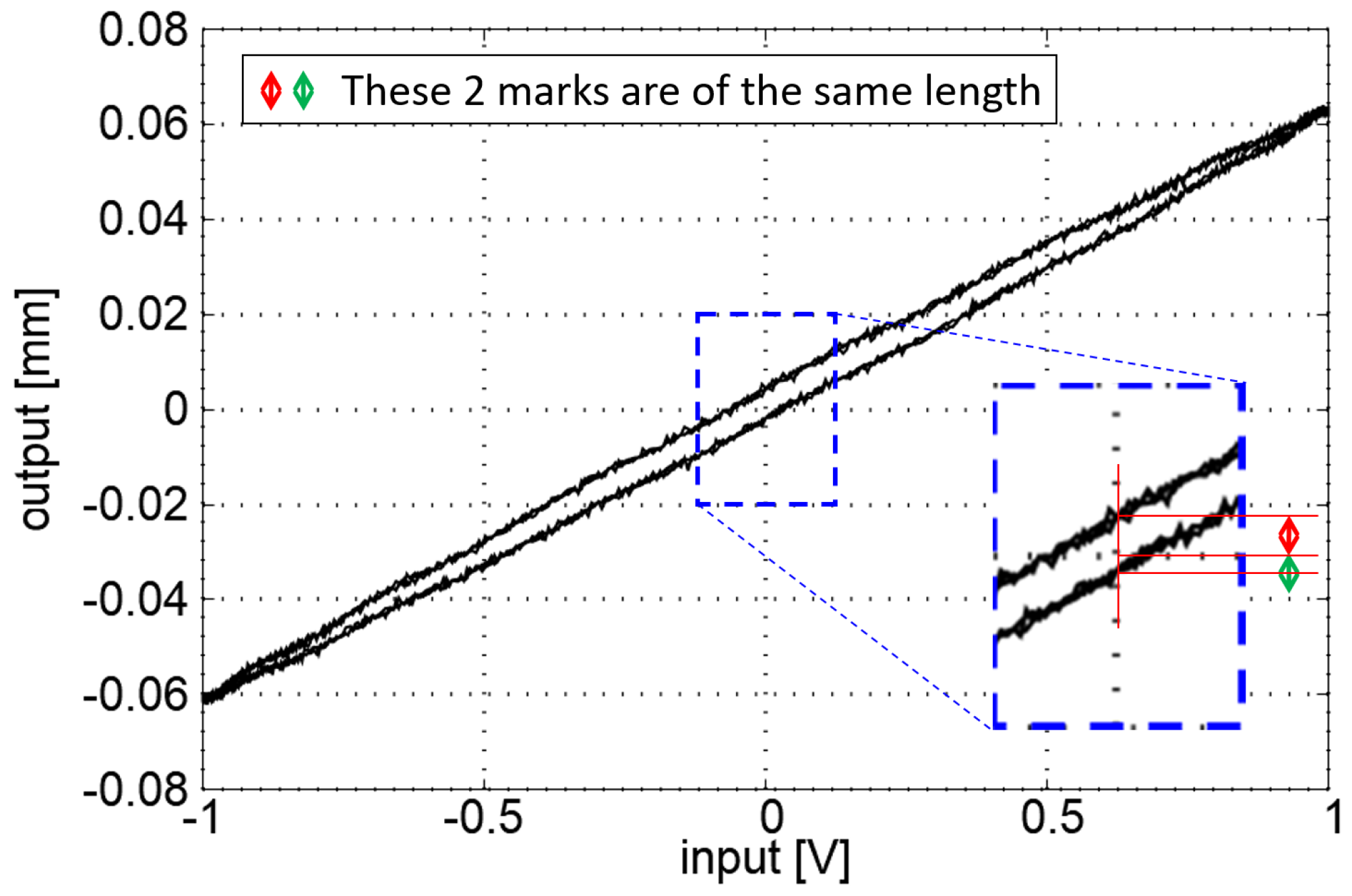
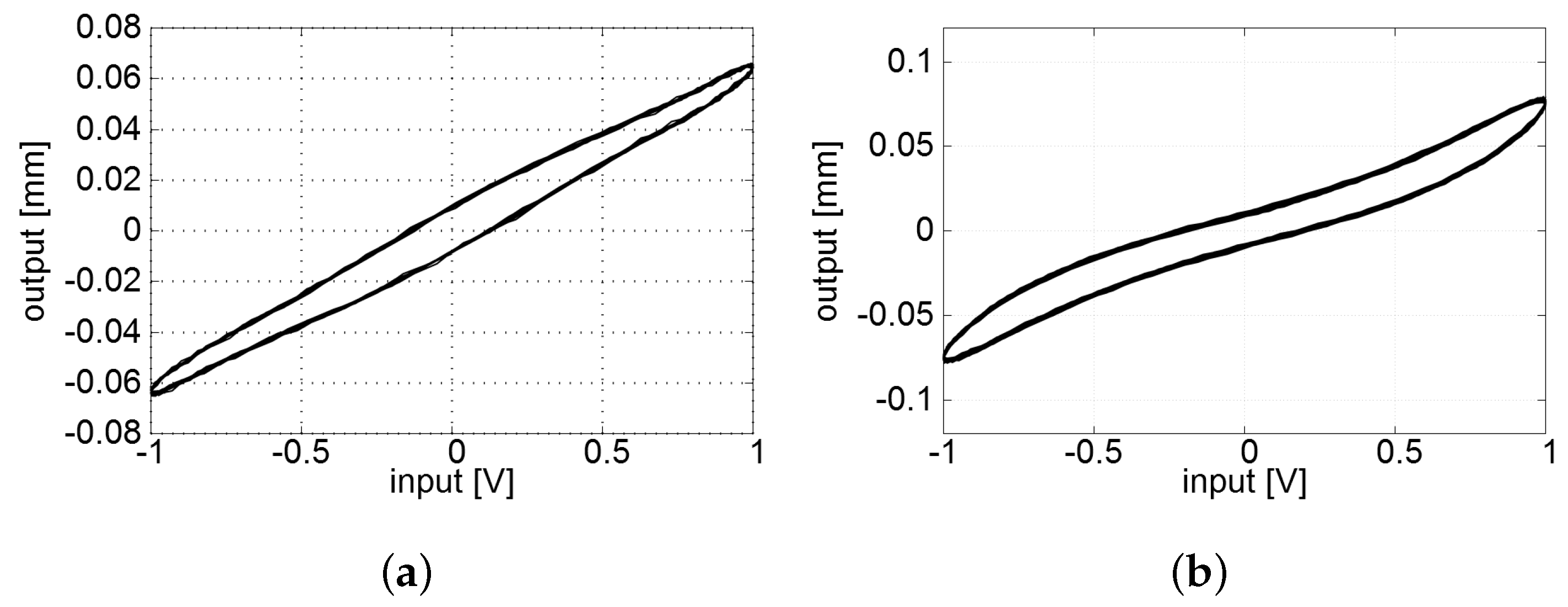
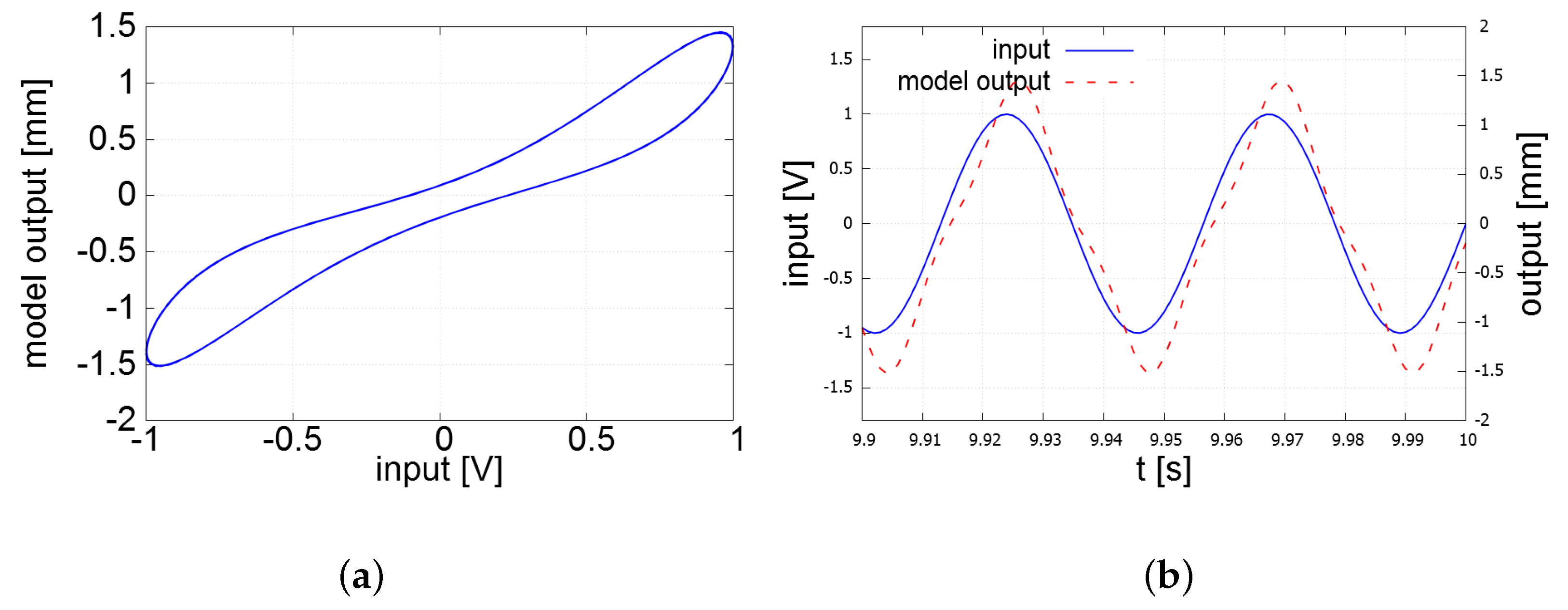
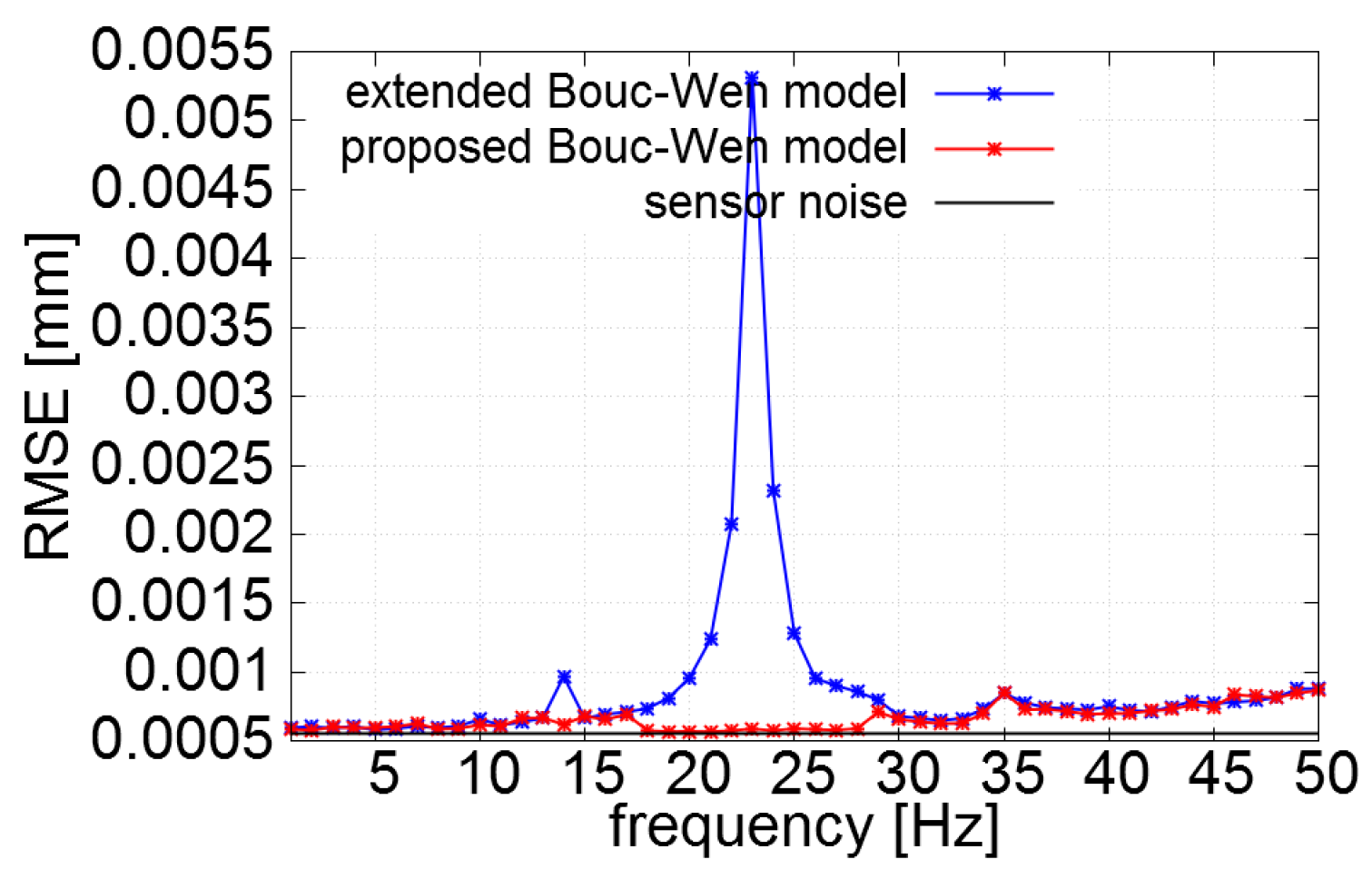
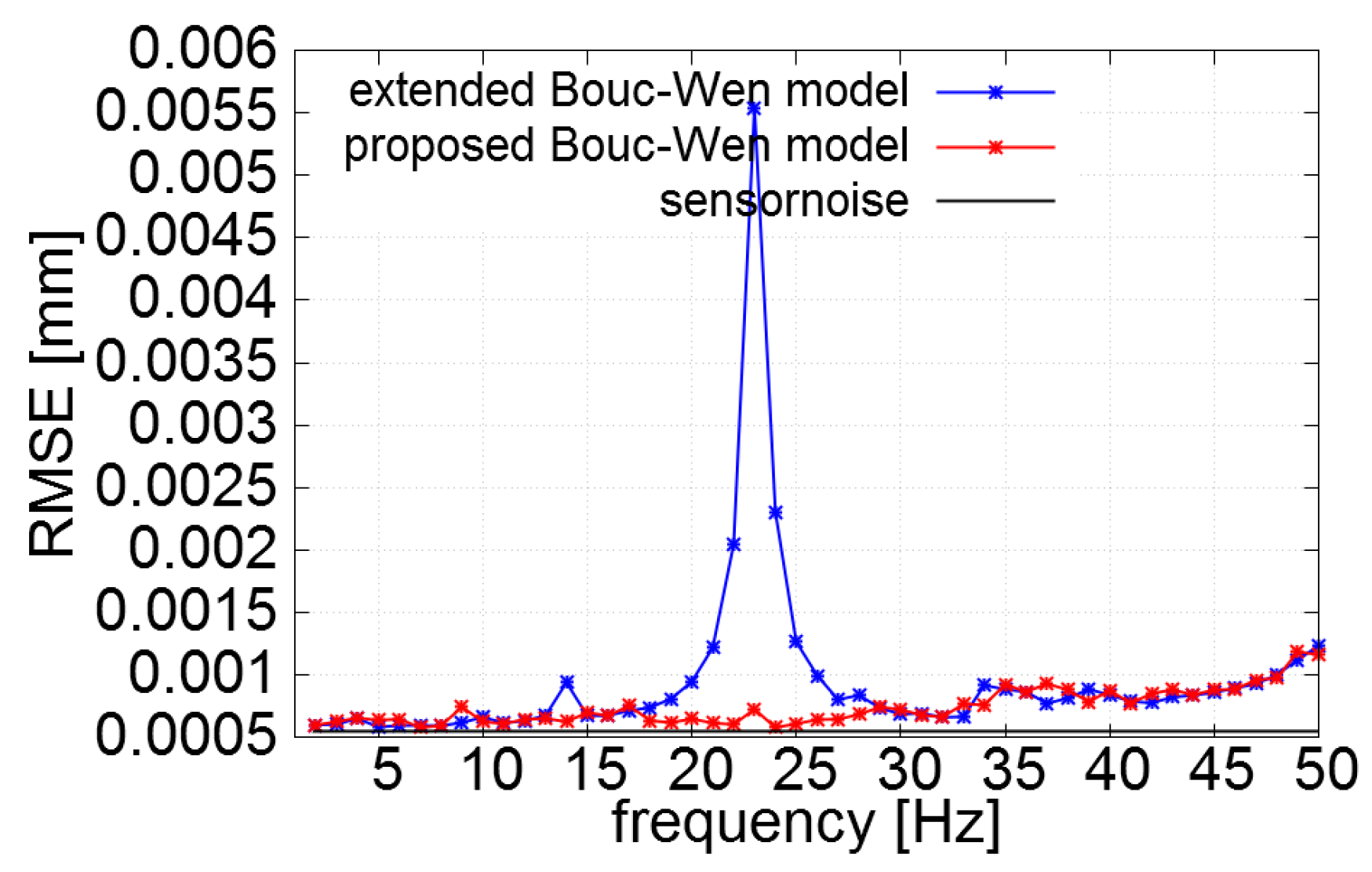
Figure 10 shows that the extended Bouc–Wen model produced a large modeling error at the frequency where odd harmonic oscillation was observed, whereas the error was eliminated when the proposed enhanced Bouc–Wen model was applied.
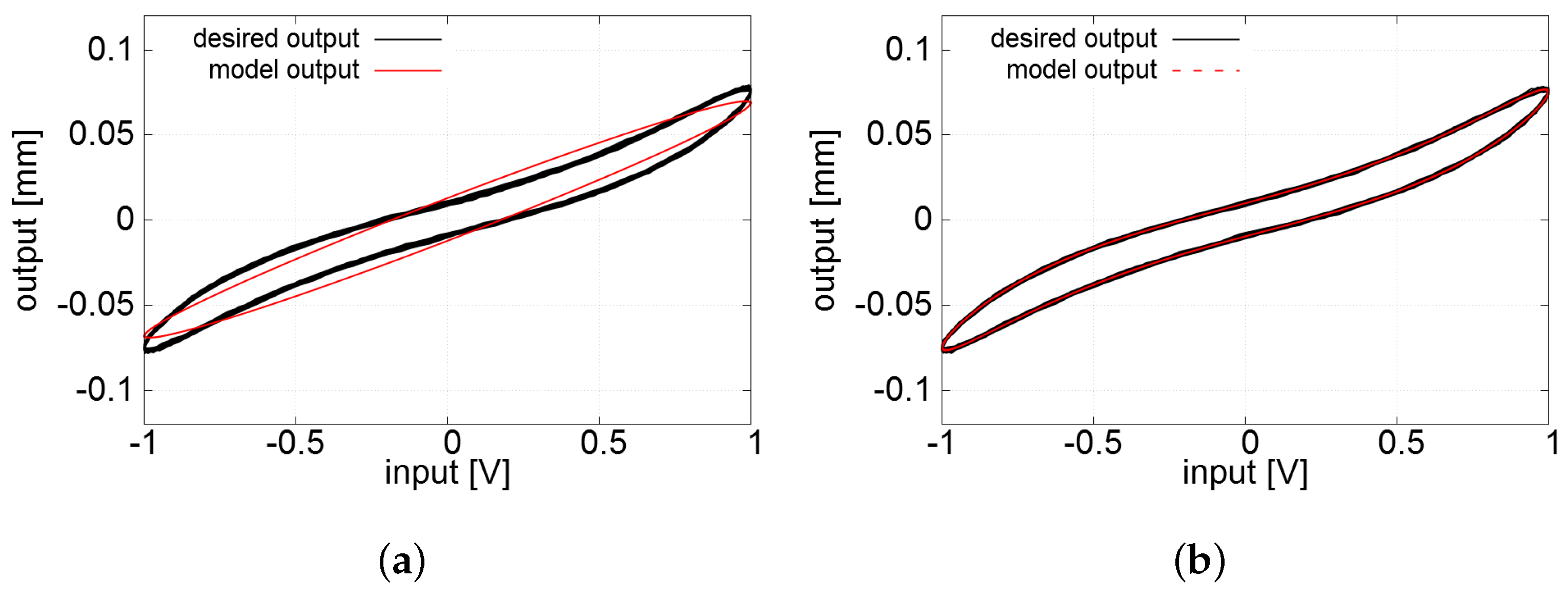
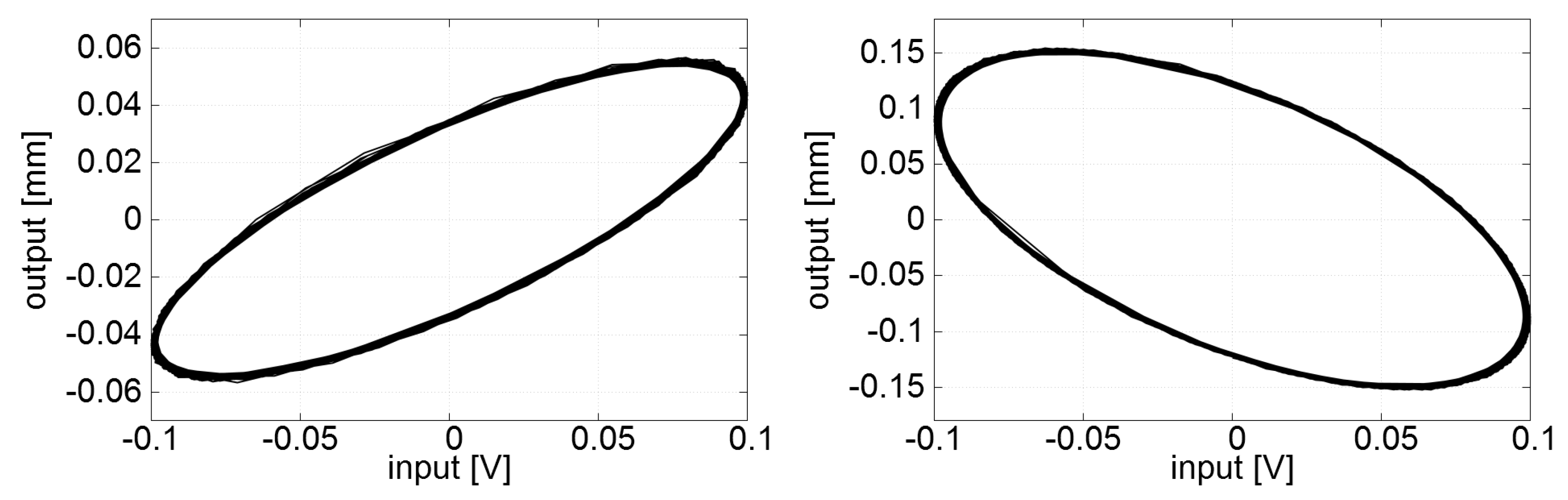
Figure 11 shows the hysteresis loops calculated with the extended Bouc–Wen model and the proposed enhanced Bouc–Wen model (
6). The modeling precision attained with the proposed enhanced Bouc–Wen model with the third harmonic component was much better than that with the extended Bouc–Wen model.
4. Compensation of Hysteresis Nonlinearity and Attenuation of Odd Harmonic Oscillation with the Enhanced Bouc–Wen model
We employed a two-stage thinking strategy to synthesize a controller which not only compensates hysteresis but also attenuates the odd harmonic. The final form of the proposed controller should be classified as a FF + FB architecture as mentioned in the introduction, but the usage of feedback is indirect. We first derive a hysteresis compensation control input
based on the direct inverse using the first two equations of the enhanced Bouc–Wen model (
6) and (
7). We then synthesize an additional control input
or
which amounts to the source of odd harmonic oscillation and subtract it from
, intending to cancel the source of odd harmonic oscillation. The details are given below.
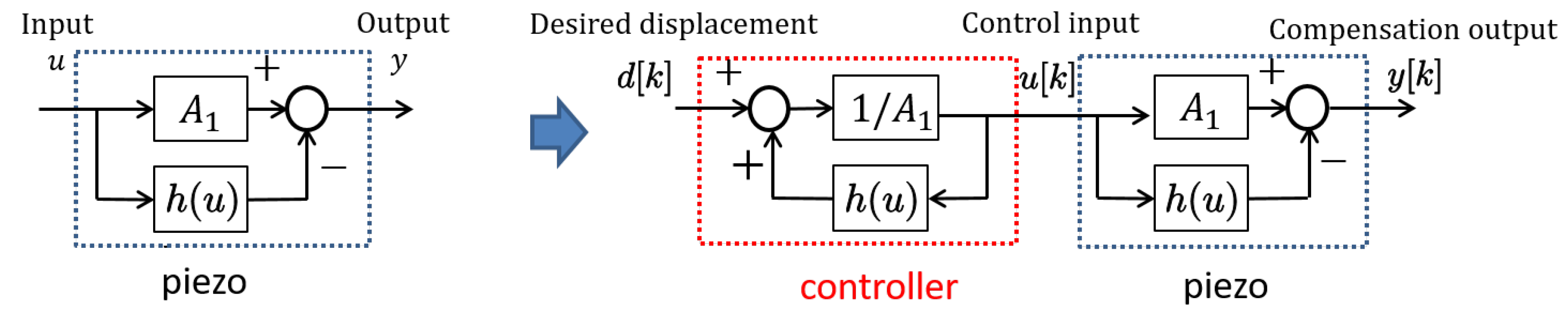
We start from the derivation of the hysteresis compensation input
. It is based on the idea referred to as the direct inverse multiplication proposed by Rakotondrabe [
8] which is schematically described by a block diagram in
Figure 12.
If the output of the model is identically equal to the desired output
d, a simple algebraic manipulation of (
1) leads to the control law
Following the same line, we replace the output terms
,
with their desired values
, and
in the second equation of (
3) to have
where
denotes the synthesized control input at the
k-th sampling interval. However, the control law (
15) is not feasible in its current form, as it includes
, and the calculation of
in the first equation of (
3) requires
. We thus need further algebraic manipulation of the equation. Introducing the first equation of (
3) to (
15) while carefully handling the absolute-valued terms included in the equation, we have
as the control law when
, or
as the control law when
. These two formulas of the control law can be calculated with the identified model parameters without having causality-related issues.
The control input
does not take odd harmonics into account. The tracking error between the desired response
and the actuator output
with this control input
might be governed by the odd harmonics.
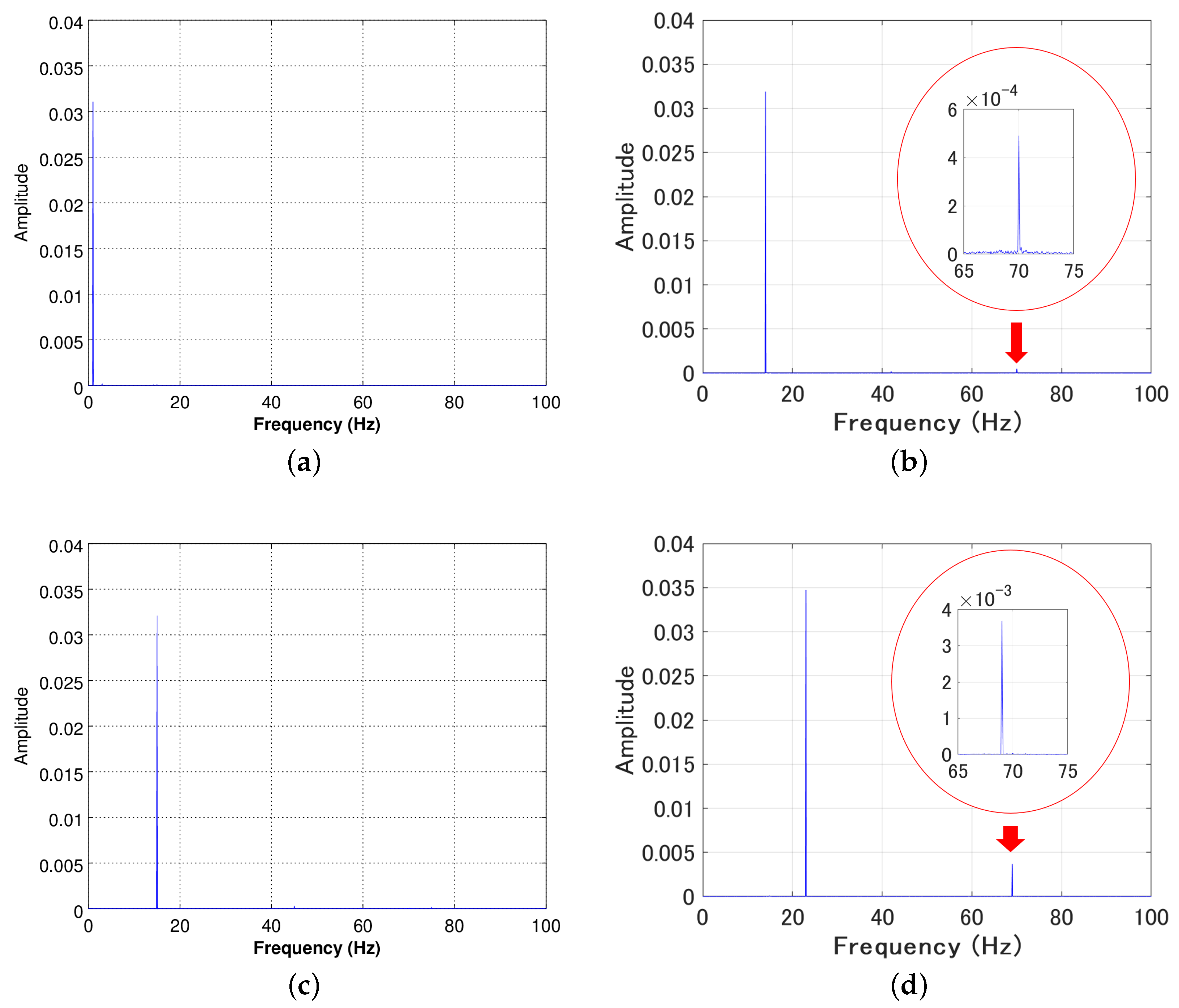
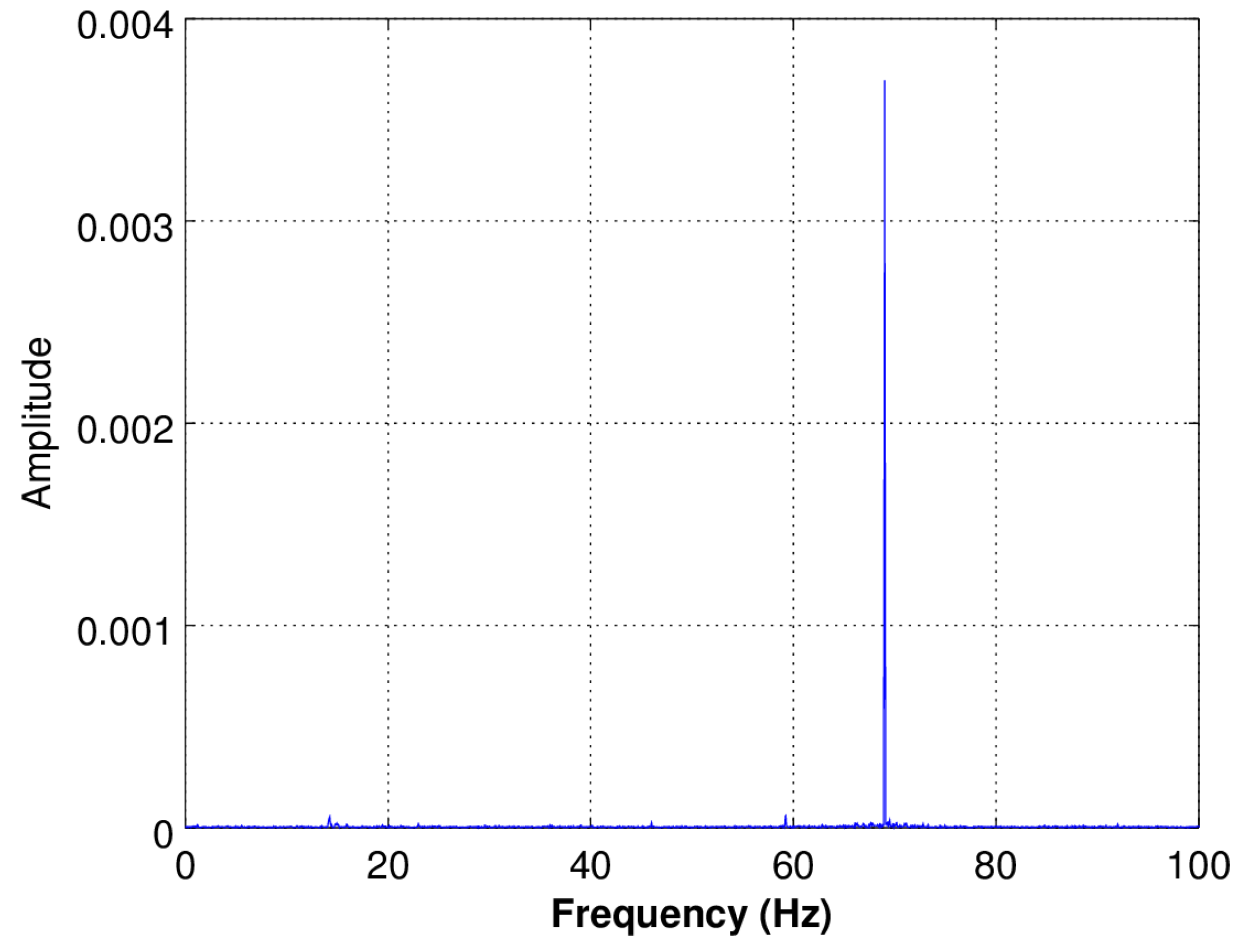
Figure 13 shows the result of FFT analysis of the tracking error signal when the 23 Hz sinusoidal reference signal is given. The actuator is controlled by the inputs calculated by (
16) and (
17). It can be seen from the figure that the error is governed by the third harmonic of the input. Thus, it is natural to infer that the actuator motion in this kind of situation can be explained numerically by the third equation defining
or
of the proposed enhanced Bouc–Wen model (
6) or (
7). However, since we conducted the parameter identification experiment using a pure sinusoidal input signal, the identified
or
cannot be used to attenuate the harmonic since the phase and the amplitude of the third/fifth harmonic oscillation of the actuator under the control by
would be different from the values observed with pure sinusoidal inputs.
In principle, the control law synthesized here to attenuate the odd harmonic oscillation is close to the technique known as ZV input shaping [
17], as the proposed input excites 180° out-of-phase odd harmonic oscillation with the tracking error signal to cancel it out. Let
(
for fifth harmonic) denote the values of
, which explain the behavior of the tracking error—the difference between
and
—governed by the third/fifth harmonic. These
s can be determined by the RLS algorithm using the third equation of (
6) or (
7).
If we calculate the input signal by
for the third harmonic behavior when the third harmonic is present, or
for the fifth harmonic behavior when the fifth harmonic is present, the control law
for the reference frequency whose actuator response contains
component, or
for the frequency whose actuator response contains
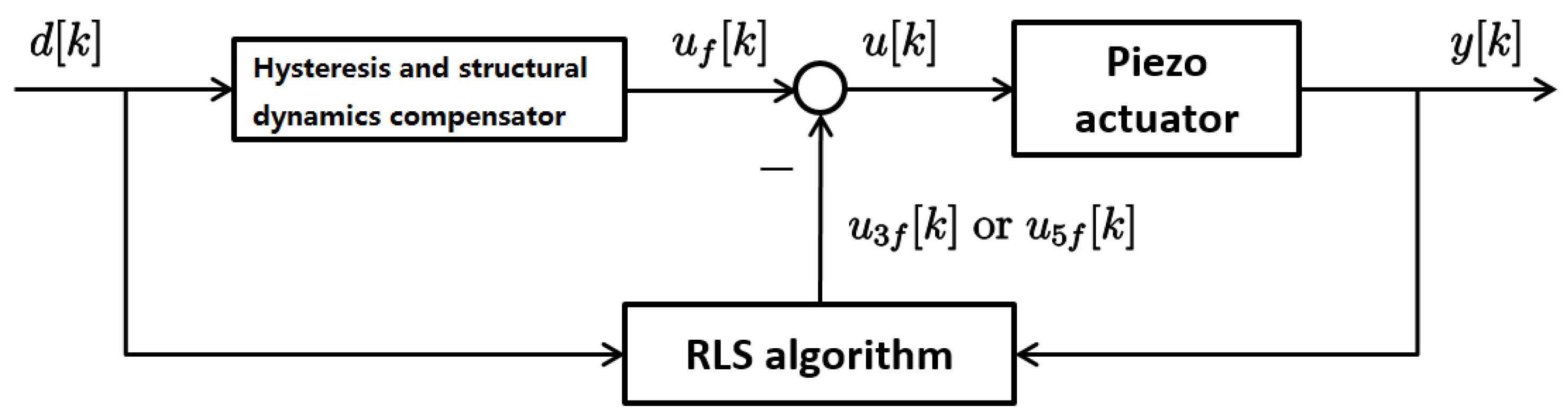
component will compensate the hysteresis and attenuate the third/fifth harmonic when it is present. The entire block diagram of the control system proposed positioning tracking control system is given in
Figure 14. The control input
compensates both hysteresis and structural dynamics, and the additional input
or
attenuates the odd harmonic oscillation.
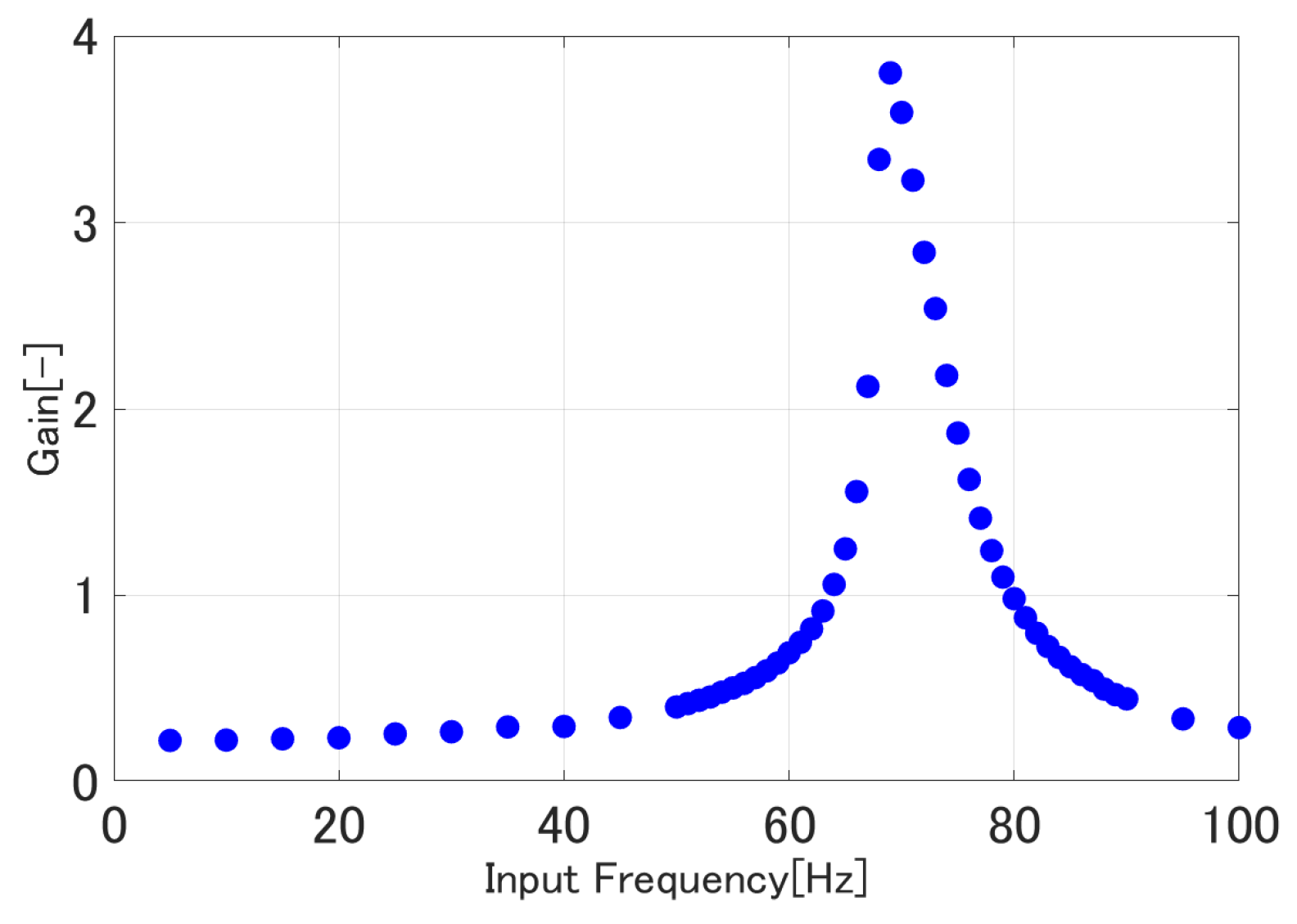
A short note should be given here about the implementation of the proposed control system. We will do the RLS calculation on-line to determine
in the control law using the measured tracking error. However, because of the physical characteristics of the actuator used in this study (as shown in
Figure 15), we calculated the tracking error used in the RLS calculation by
for the reference frequencies between 18 and 22 Hz where third harmonic is present but is smaller than or equal to 66 Hz, whereas we use the definition
for the reference frequencies of 14 and 23 to 26 Hz whose fifth or third harmonic exceeds 66 Hz.
5. Compensation Experiment
A hysteresis compensation experiment was conducted with the thin bimorph piezoelectric actuator to show the validity of the proposed compensator. Results obtained with the controller synthesized with the extended Bouc–Wen model hence discarding the odd harmonic oscillation are also shown here for comparison.
Let the desired output be defined by
where
represents the amplitude of the desired trajectory and
f is the driving frequency which was altered from 1 Hz to 50 Hz with 1 Hz increment. The quantity
is determined by
for each
f using the input sequence
and the corresponding output measurement
both obtained in the identification experiment, where
m is the number of data points used for calculation. Root mean squared compensation error was calculated for every frequency attempt using the data collected after 20 s from the start of the control attempt to exclude the transient response from compensation performance calculation.
Figure 16 shows the root mean squared error (RMSE) values of the tracking control. The proposed hysteresis compensation with the third/fifth harmonic attenuation clearly outperformed the controller based on the extended Bouc–Wen model, which does not consider the third/fifth harmonics.
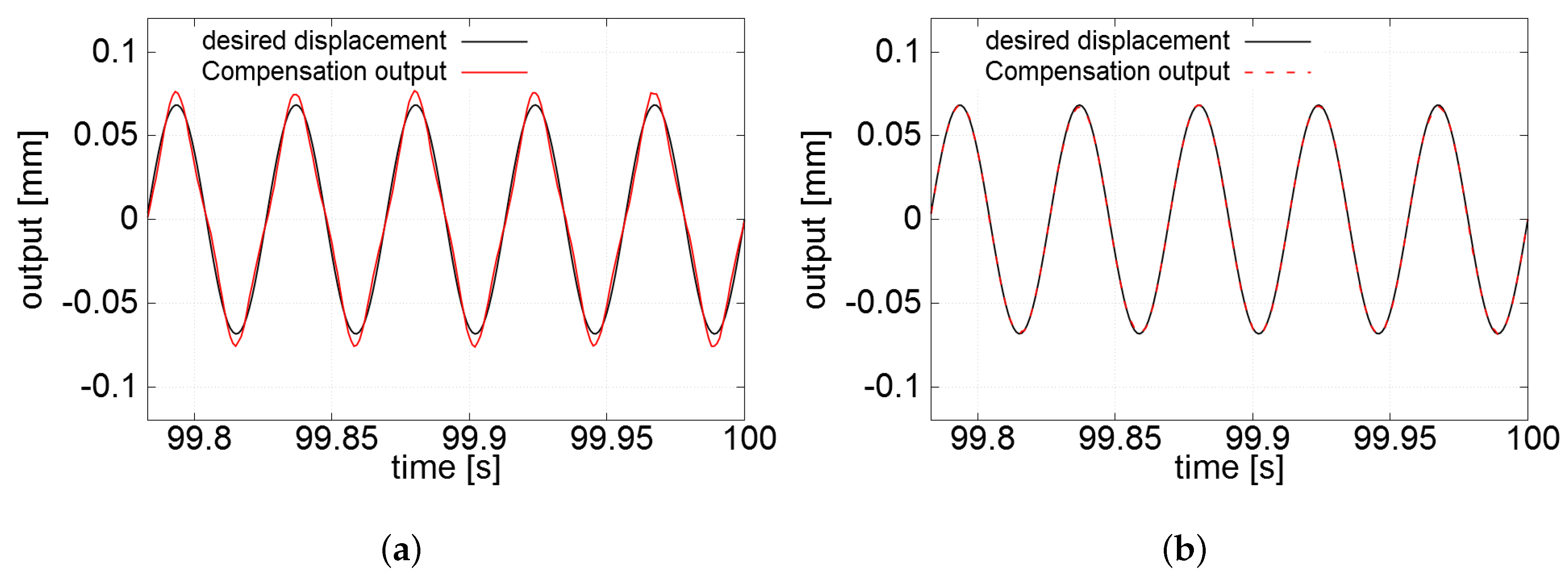
Figure 17 shows the result of the tracking control to the 23 Hz reference in time domain. High precision tracking was achieved with the proposed controller shown in
Figure 17b, whereas moderate tracking error remains in
Figure 17a.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}