Passive Damping of Rotationally Periodic Structures with Tuned Piezoelectric Inductive Shunt

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
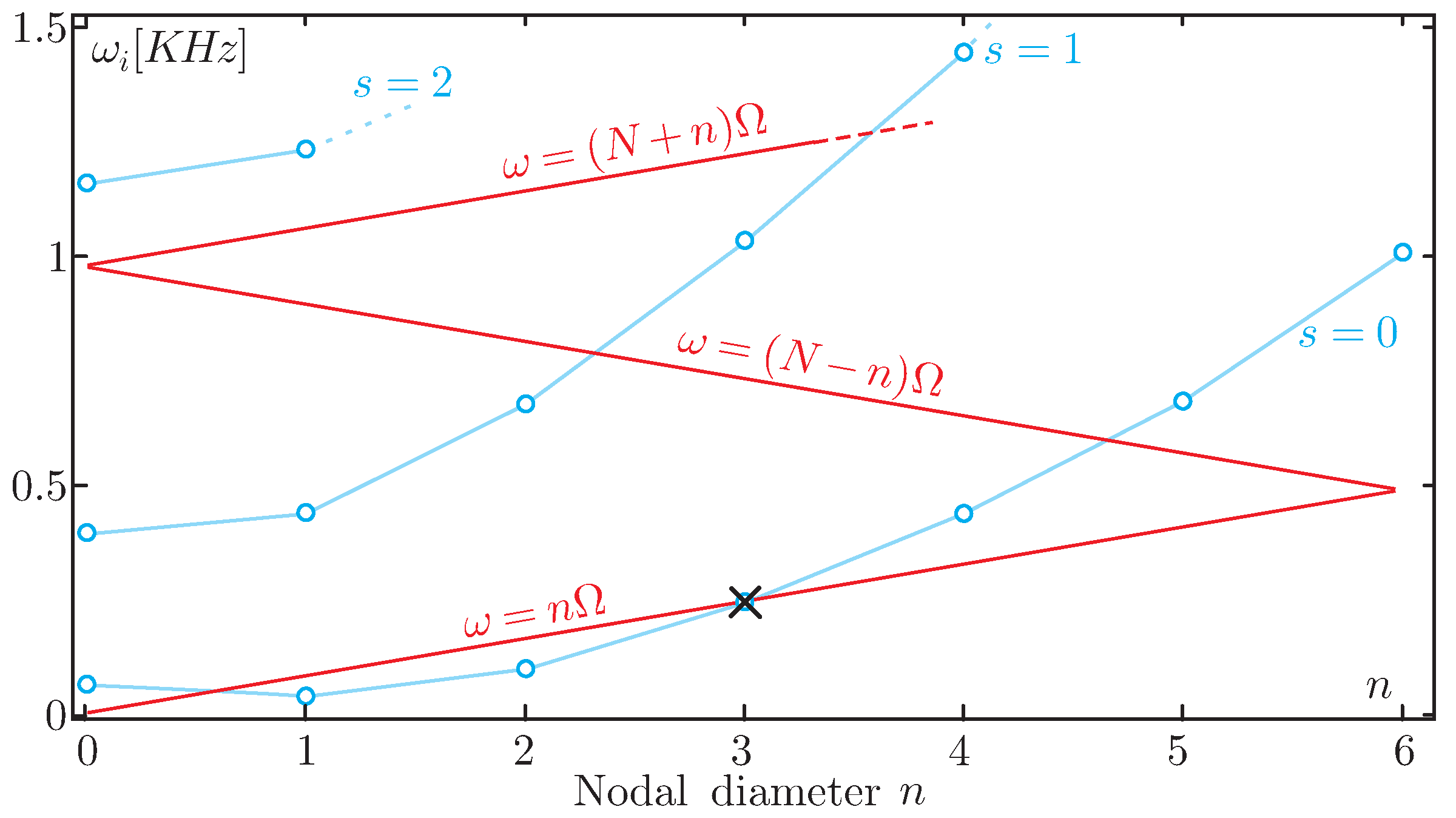
2. Resonance Condition
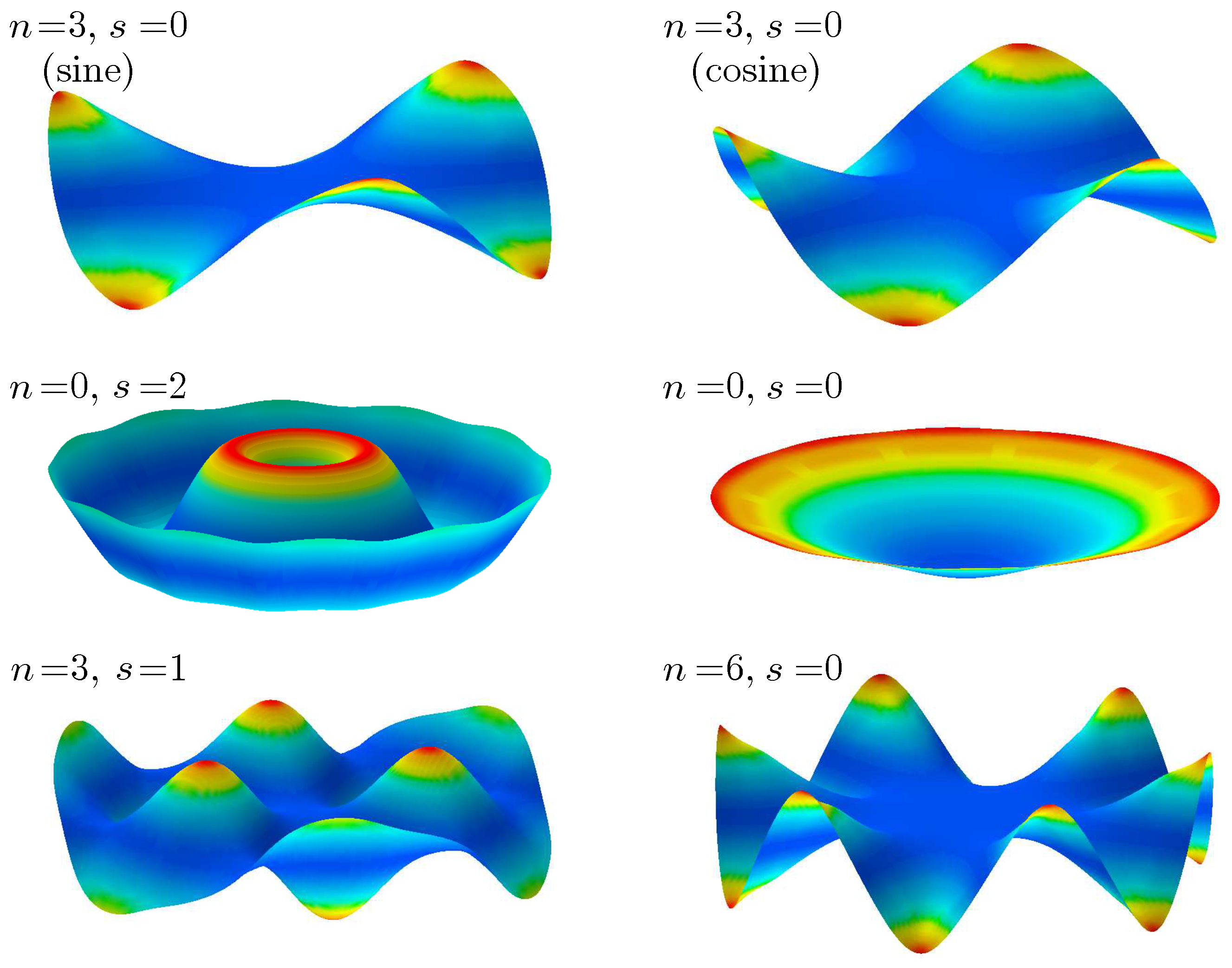
3. Damping a Mode with n Nodal Diameters
3.1. Independent Loops
3.2. Parallel Loops
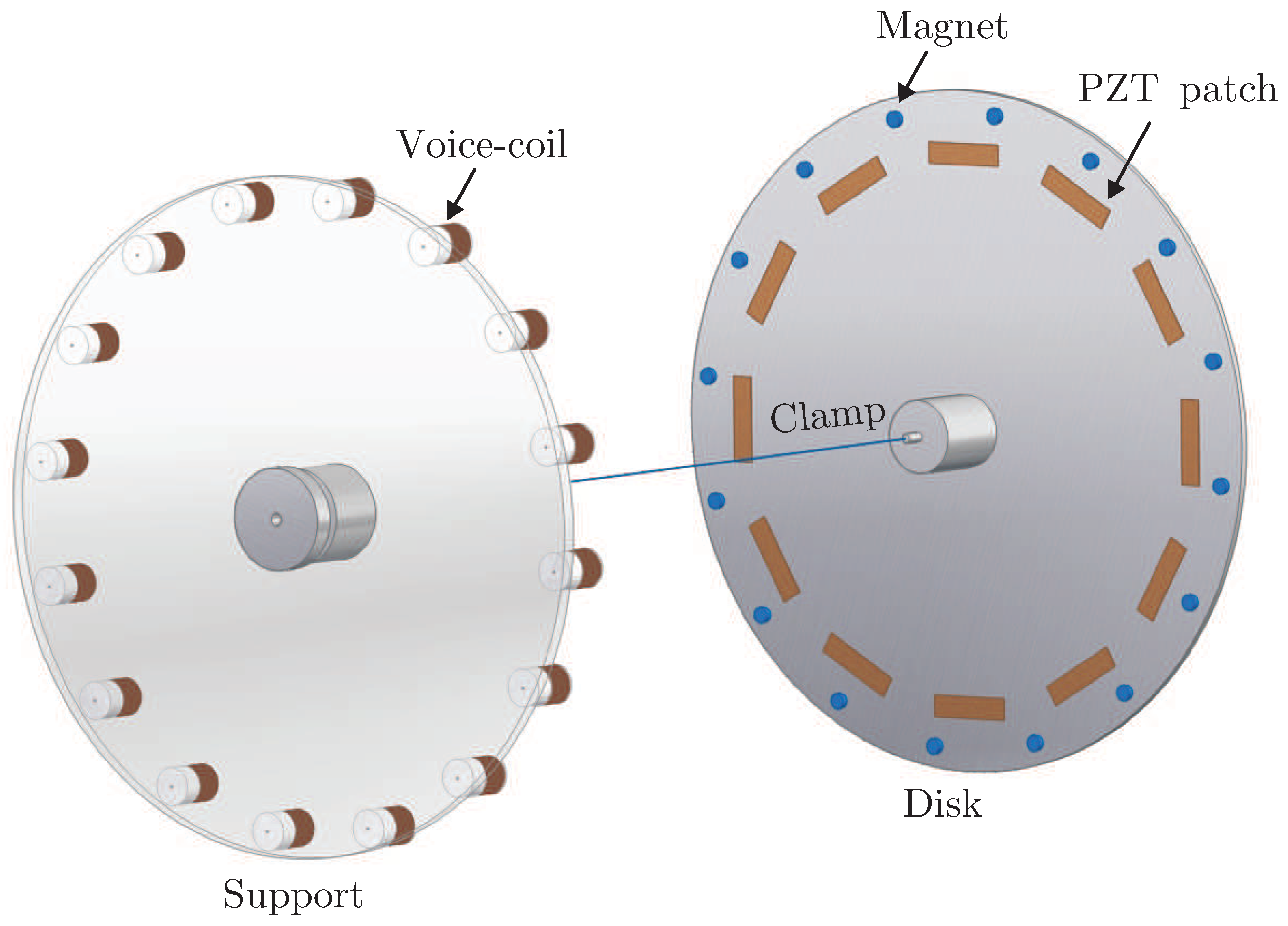
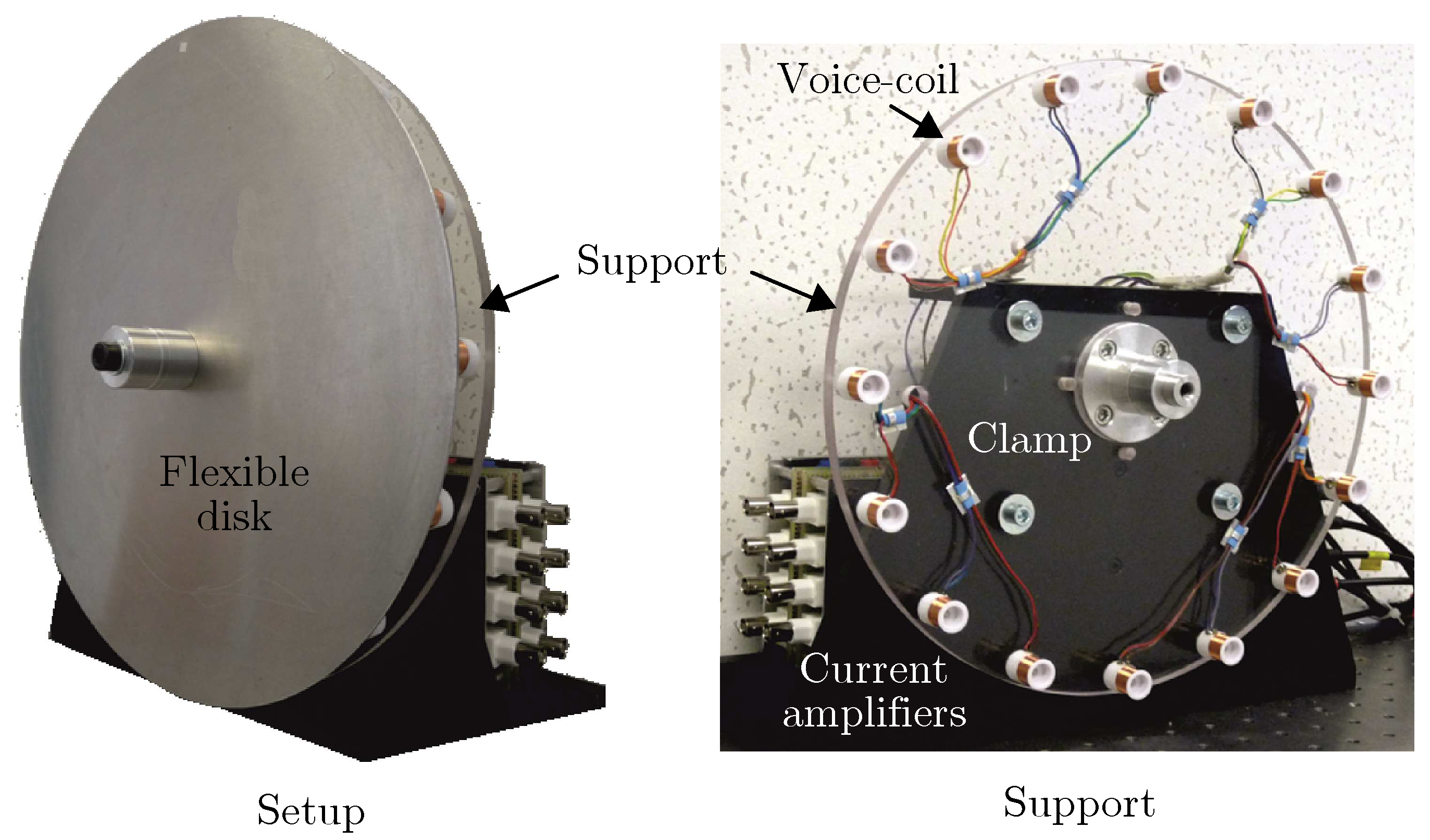
4. Experimental Setup
Excitation
5. Numerical Simulation
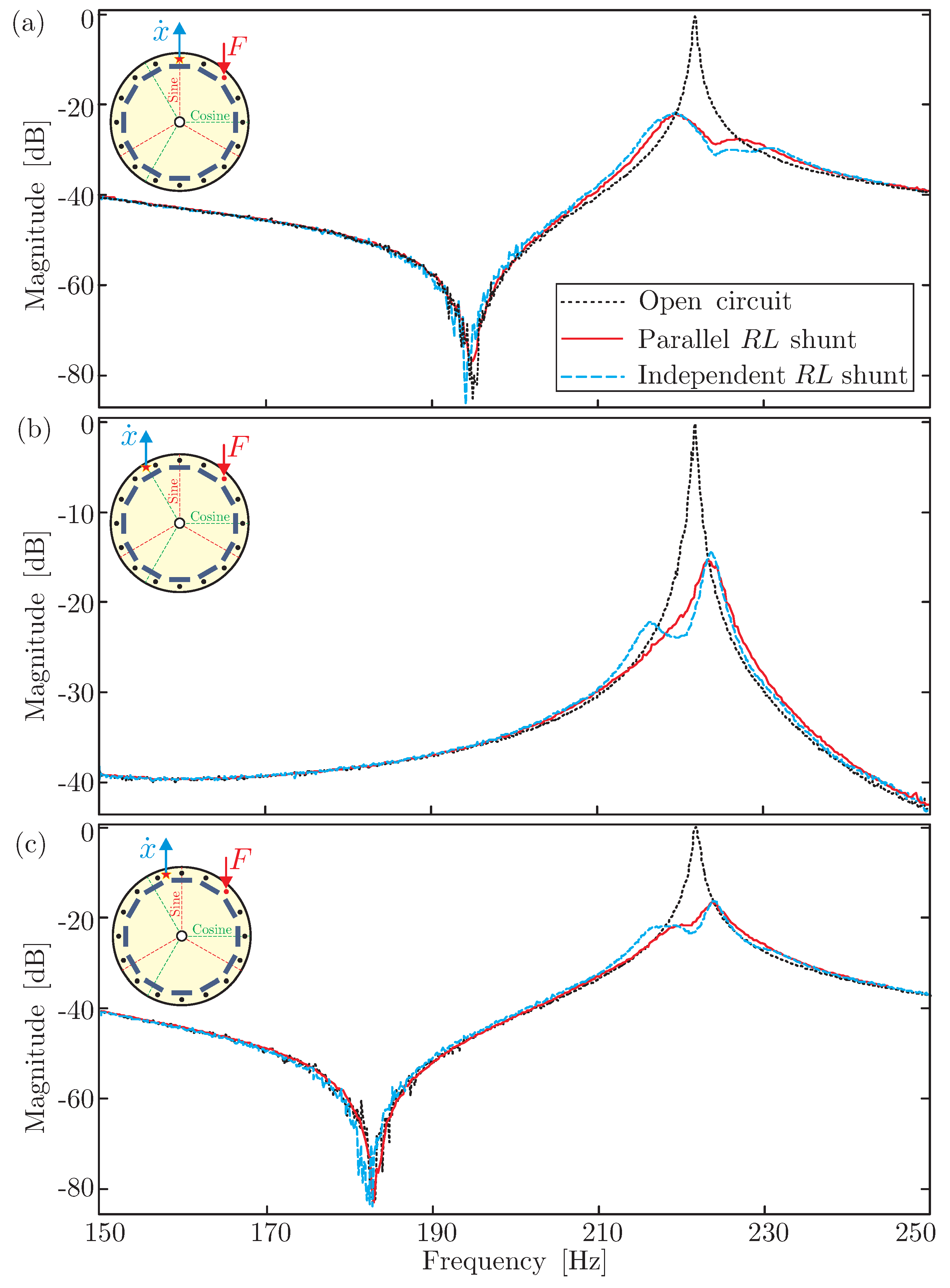
6. Experimental Results
7. Conclusions
8. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Griffin, J.H. A review of friction damping of turbine blade vibration. Int. J. Turbo Jet Engines 1990, 7, 297–308. [Google Scholar] [CrossRef]
- Laxalde, D.; Thouverez, F.; Lombard, J.P. Force response analysis of integrally bladed disks with friction ring dampers. J. Vib. Acoust. 2010, 1, 132. [Google Scholar]
- Tang, J.; Wang, K.W. Vibration control of rotationally periodic structures using passive piezoelectric shunt networks and active compensation. J. Vib. Acoust. 1999, 121, 379–390. [Google Scholar] [CrossRef]
- Kauffman, J.; Lesieutre, G. Piezoelectric-based vibration reduction of turbomachinery bladed disks via resonance frequency detuning. AIAA J. 2012, 50, 1137–1144. [Google Scholar] [CrossRef]
- Forward, R.L. Electronic damping of vibrations in optical structures. Appl. Opt. 1979, 18, 690–697. [Google Scholar] [CrossRef] [PubMed]
- Forward, R.L. Electronic damping of orthogonal bending modes in a cylindrical mast experiment. AIAA J. Spacecr. 1981, 18, 11–17. [Google Scholar] [CrossRef]
- Hagood, N.W.; von Flotow, A. Damping of structural vibrations with piezoelectric materials and passive electrical networks. J. Sound Vib. 1991, 146, 243–268. [Google Scholar] [CrossRef]
- Kozlowski, M.V.; Cole, D.G.; Clark, R.L. A comprehensive study of the RL series resonant shunted piezoelectric: A feedback control perspective. J. Vib. Acoust. 2011, 133, 011012. [Google Scholar] [CrossRef]
- Lossouarn, B.; Deü, J.F.; Aucejo, M.; Cunefare, K.A. Multimodal vibration damping of a plate by piezoelectric coupling to its analogous electrical network. Smart Mater. Struct. 2016, 25, 115042. [Google Scholar] [CrossRef] [Green Version]
- Hollkamp, J.J. Multimodal passive vibration suppression with piezoelectric materials and resonant shunts. J. Intell. Mater. Syst. Struct. 1994, 5, 49–57. [Google Scholar] [CrossRef]
- Antoniou, A. Realisation of gyrators using operational amplifiers, and their use in RC-active-network synthesis. Proc. Inst. Electr. Eng. 1969, 116, 1838–1850. [Google Scholar] [CrossRef]
- Lossouarn, B.; Aucejo, M.; Deü, J.F.; Multon, B. Design of inductors with high inductance values for resonant piezoelectric damping. Sens. Actuators A Phys. 2017, 259, 68–76. [Google Scholar] [CrossRef] [Green Version]
- Guyomar, D.; Richard, C. Non-linear and hysteretic processing of piezoelement: Application to vibration control, wave control and energy harvesting. Int. J. Appl. Electromagn. Mech. 2005, 21, 193–207. [Google Scholar]
- Wildheim, S.J. Excitation of rotationally periodic structures. J. Appl. Mech. 1979, 46, 878–882. [Google Scholar] [CrossRef]
- Mokrani, B.; Bastaits, R.; Horodinca, M.; Romanescu, I.; Burda, I.; Viguié, R.; Preumont, A. Passive piezo damping of rotationally periodic structures with application to a bladed drum. In Proceedings of the International Conference of Noise and Vibration Engineering (ISMA2014), Leuven, Belgium, 15–17 September 2014; pp. 667–682. [Google Scholar]
- Mokrani, B.; Bastaits, R.; Horodinca, M.; Romanescu, I.; Burda, I.; Viguié, R.; Preumont, A. Parallel piezoelectric shunt damping of rotationally periodic structures. Adv. Mater. Sci. Eng. 2015. [Google Scholar] [CrossRef]
- Mokrani, B. Piezoelectric Shunt Damping of Rotationally Periodic Structures. Ph.D. Thesis, Université Libre de Bruxelles, Active Structures Laboratory, Brussels, Belgium, 2015. [Google Scholar]
- Piefort, V. Finite Element Modeling of Piezoelectric Active Structures. Ph.D. Thesis, Université Libre de Bruxelles, Active Structures Laboratory, Brussels, Belgium, 2001. [Google Scholar]
- Viguié, R.; Verhelst, D.; Preumont, A.; Mokrani, B.; Bastaits, R. Piezoelectric Damper System for an Axial Turbomachine Rotor. Patent US20150104295A1, CA2866756A1, CN104564798A, EP2860405B1, 16 April 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ns | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| 0 | 63.08 | 374.32 | 1096.59 | 2180.32 |
| 1 | 38.69 | 415.91 | 1163.64 | 2271.23 |
| 38.69 | 415.91 | 1163.64 | 2271.23 | |
| 2 | 93.64 | 639.31 | 1490.36 | |
| 93.69 | 639.41 | 1492.67 | ||
| 3 | 223.43 | 969.06 | 1963.05 | |
| 223.43 | 969.06 | 1963.05 |
| Parameter | Independent Loops | Parallel Loops |
|---|---|---|
| Apparent capacitance | 12 × 52 nF | 2 × 313 nF |
| Inductance L | 12 × 9 H | 2 ×1.5 H |
| Resistance R | 12 × 945 Ohm | 2× 157 Ohm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mokrani, B.; Bastaits, R.; Romanescu, I.; Horodinca, M.; Burda, I.; Preumont, A. Passive Damping of Rotationally Periodic Structures with Tuned Piezoelectric Inductive Shunt. Actuators 2018, 7, 41. https://doi.org/10.3390/act7030041
Mokrani B, Bastaits R, Romanescu I, Horodinca M, Burda I, Preumont A. Passive Damping of Rotationally Periodic Structures with Tuned Piezoelectric Inductive Shunt. Actuators. 2018; 7(3):41. https://doi.org/10.3390/act7030041
Chicago/Turabian StyleMokrani, Bilal, Renaud Bastaits, Iulian Romanescu, Mihaita Horodinca, Ioan Burda, and André Preumont. 2018. "Passive Damping of Rotationally Periodic Structures with Tuned Piezoelectric Inductive Shunt" Actuators 7, no. 3: 41. https://doi.org/10.3390/act7030041
APA StyleMokrani, B., Bastaits, R., Romanescu, I., Horodinca, M., Burda, I., & Preumont, A. (2018). Passive Damping of Rotationally Periodic Structures with Tuned Piezoelectric Inductive Shunt. Actuators, 7(3), 41. https://doi.org/10.3390/act7030041