1. Introduction
The principles of magnetic levitation (MagLev) are used in many important applications, such as actuators, power interrupters for eliminating electric arcs, electromagnetic shock absorbers in electrical vehicles, hybrid suspension systems with active control, levitation of superconductor materials, sensors and electromagnetic mass drivers [
1]. One of the perspective usages of the MagLev systems in the near future is related to electromagnetic suspension systems and damping shock absorbers. Automobiles and trucks have shock absorbers with similar geometry to that of Thomson’s ring system. These systems are used to damper vibrations generated by imperfections of road surfaces [
2,
3,
4,
5].
Thus, it is an important challenge to be able mathematically and numerically model, analyze, control and design MagLev devices similar to Thomson’s ring system. There are also highly accurate density measurements and density-based detection methods applied to MagLev systems with similar geometries. In [
6,
7,
8], an experimental study of a single-ring MagLev system was presented, opening up a wide operational space and enabling object manipulation and density-based measurements.
In the literature, there are works focused on the numerical analysis of MagLev systems similar to that of Thomson’s ring. Vilchis et al. [
9] presented factors that affect 2D finite element method (FEM) transient simulation accuracy for an axisymmetric model of a Thomson-coil actuator. Yannan Zhou et al. [
10] numerically studied a Thomson-coil actuator applied in a circuit breaker in a high-voltage direct current system. Tezuka et al. [
11] proposed a novel magnetically-levitating motor, able to control five degrees of freedom. In all these systems, analytical or hybrid solutions can be implemented, resulting in accurate and low-demanding computational models.
Dynamic models (DM) of the MagLev systems have been previously developed. TJ-Teo et al. [
12] presented a new electromagnetic actuator which has two degrees of freedom (linear and rotary motions). Consequently, the developed MagLev system presents two mutual inductances as functions of linear and rotatory positions. Additionally, Nagai et al. [
13] realized a compact actuator system by a sensor-free approach. They presented the circuit equations for the solenoid, where the mutual inductance was approximated as a second-order polynomial function.
Here, we present a new and rigorous analytical solution to the dynamic equations of the MagLev systems, wherein a mutual inductance, which is the key parameter of electromagnetic force, is calculated analytically. This way, we obtain a method that retains the simplicity of lumped-parameter models plus the accuracy of analytical methods within a field modeling context. Our approach was validated using experimental test results obtained from a Thomson’s jumping ring experiment.
2. Model
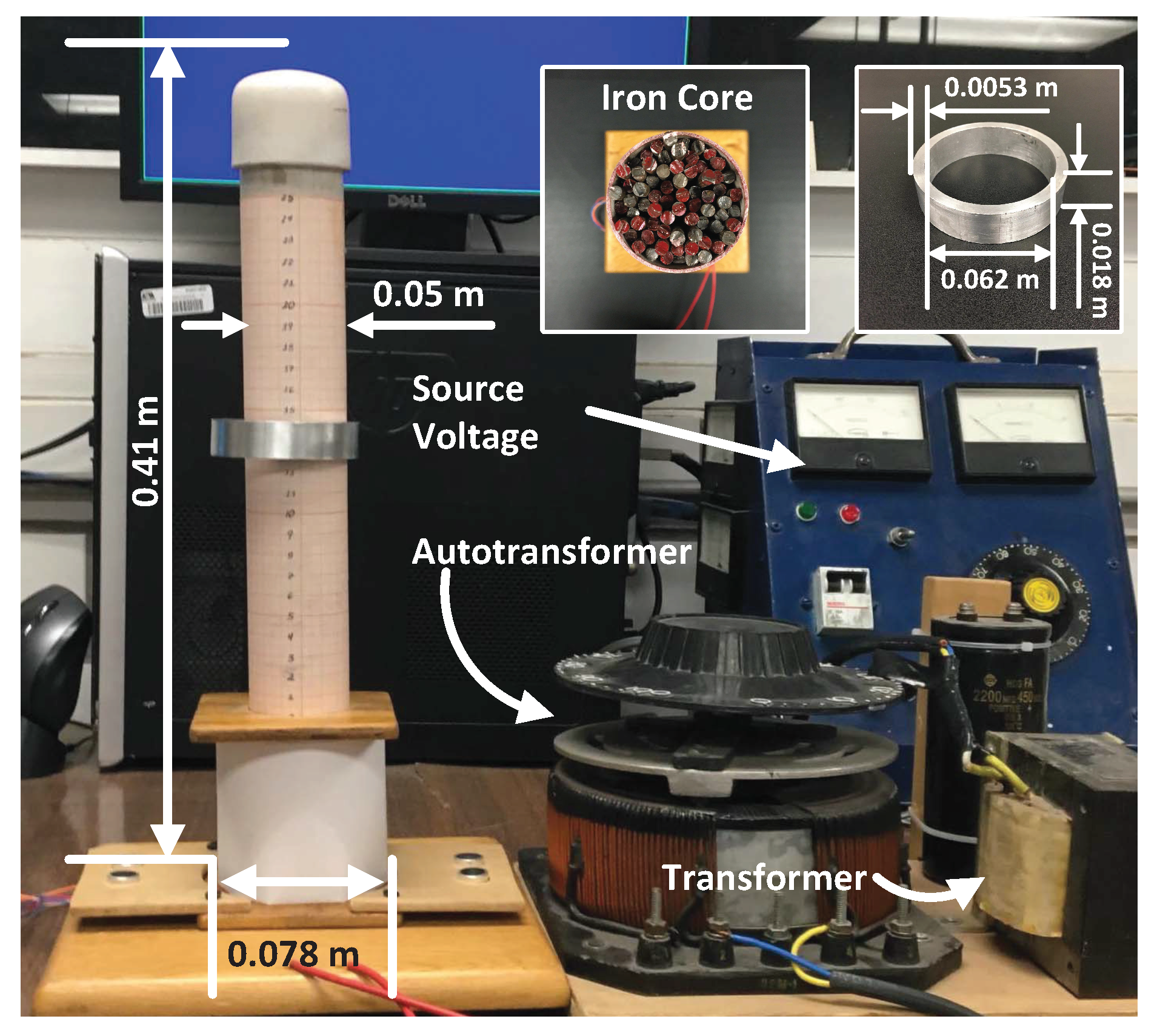
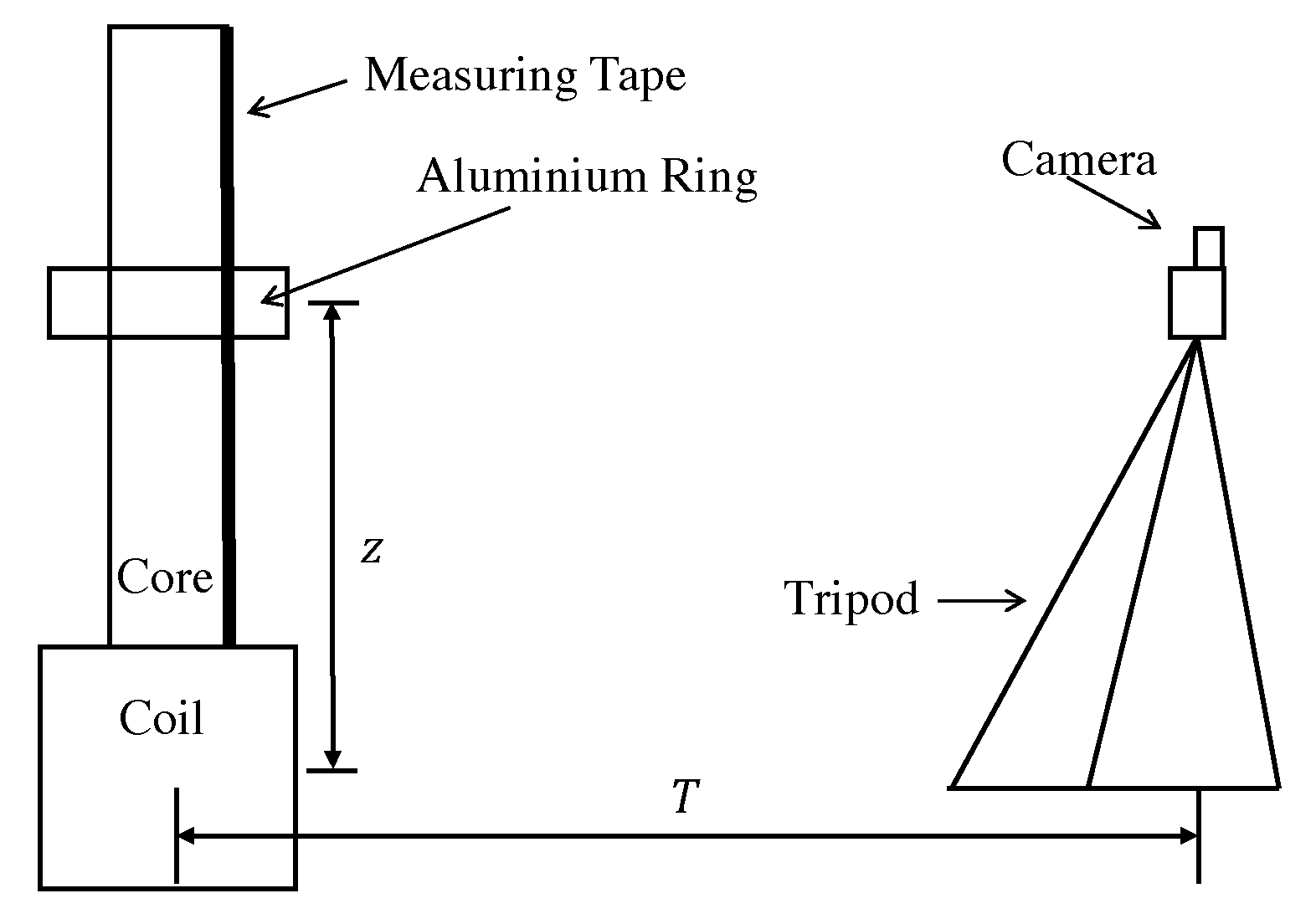
In this work, a system known as the Thomson’s jumping ring is studied, where an aluminum ring is used as a levitating object. The experimental setup is shown in
Figure 1. The system is composed of a primary copper coil of 1140 turns, and an aluminum ring that moves freely up and down along a laminated ferromagnetic core.
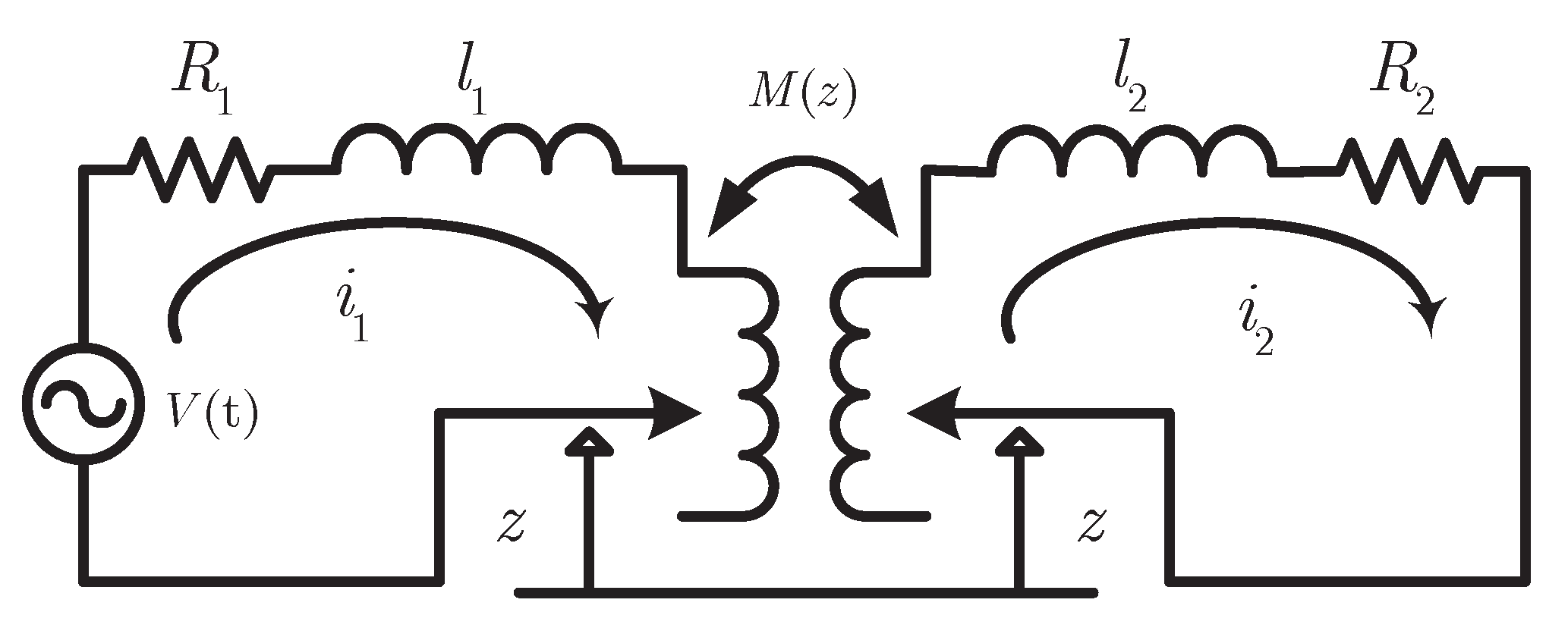
The equivalent circuit depicted in
Figure 2 models this MagLev system.
The governing differential equations that govern the dynamics of the circuit represented in
Figure 2 can be obtained from the Lagrangian
where
z is the ring height, and
and
are the electric currents in the primary coil and aluminum ring, respectively. The parameters
and
are the primary and secondary circuits’ inductances;
M is the mutual inductance between the coil and ring; and
m and
g are the aluminum ring mass and gravitational constant, respectively. Notice that the mutual inductance
is a function of the distance
z between the coil and ring [
14]. Thus, the Lagrange equations are as follows:
where
and
are the coil and ring resistances;
and
are the coil and ring electric charges, respectively; and
is the friction coefficient. The right-hand side terms of the Lagrange equations are generalized forces, which are considered as independent terms, associated with the generalized coordinate. Substitution of the Lagrangian (
1) into Lagrange equations results in the following system of differential equations (see also [
15,
16]):
3. Formula for the Mutual Inductance
Mutual inductance between a coil and aluminum ring is a function of the system geometry and the magnetic medium properties between two coils. It can be calculated in two ways: numerically (using FEM) or analytically. In this section, the linear mutual inductance is analytically calculated based on the results of [
17], where an infinite isotropic core is considered. According to [
17], the mutual inductance can be divided into two parts:
where
is the mutual inductance in air, i.e., in the absence of the core, and
is the contribution of the ferromagnetic core to the whole inductance. The first part of the mutual inductance can be represented in the form (see [
17]):
where
is a dimensionless parameter;
and
are complete elliptic integrals of the first and second kind, respectively [
18]. Here,
and
are pairs of cylindrical coordinates inside the coil and ring (subindices
a and
b correspond to the coil and aluminum ring, respectively). Namely,
and
are radii-vectors and
and
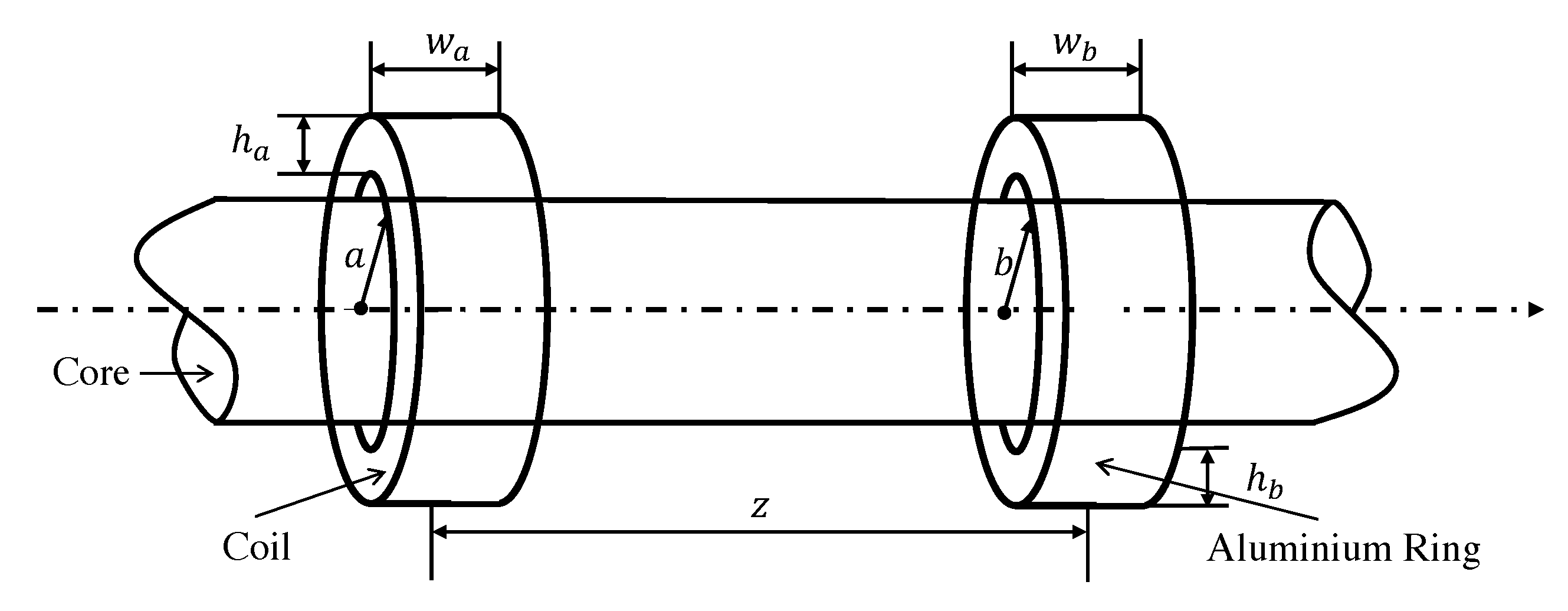
positions on the core. Integration with respect to these variables signifies that the whole volume of the coil and ring is involved in the calculation of the mutual inductance between them. Parameters
and
are the coil and ring widths;
and
are their heights; and
a and
b are their internal radii (see
Figure 3).
is the number of turns in the coil. The mutual inductance caused by the core is as follows:
where
,
is the absolute permeability of the core material,
is its relative permeability and
is core conductance.
The total mutual inductance is a function of the ring position
z; i.e.,
. Equations (
9) and (
11) are too complicated to be implemented in the dynamical analysis of the MagLev system. Equations (
9) and (
11), and FEM calculations, are too complicated and time-consuming to be implemented in the dynamical analysis of the MagLev system, especially in real-time calculations for an electromagnetic suspension system. Therefore, equations (
9) and (
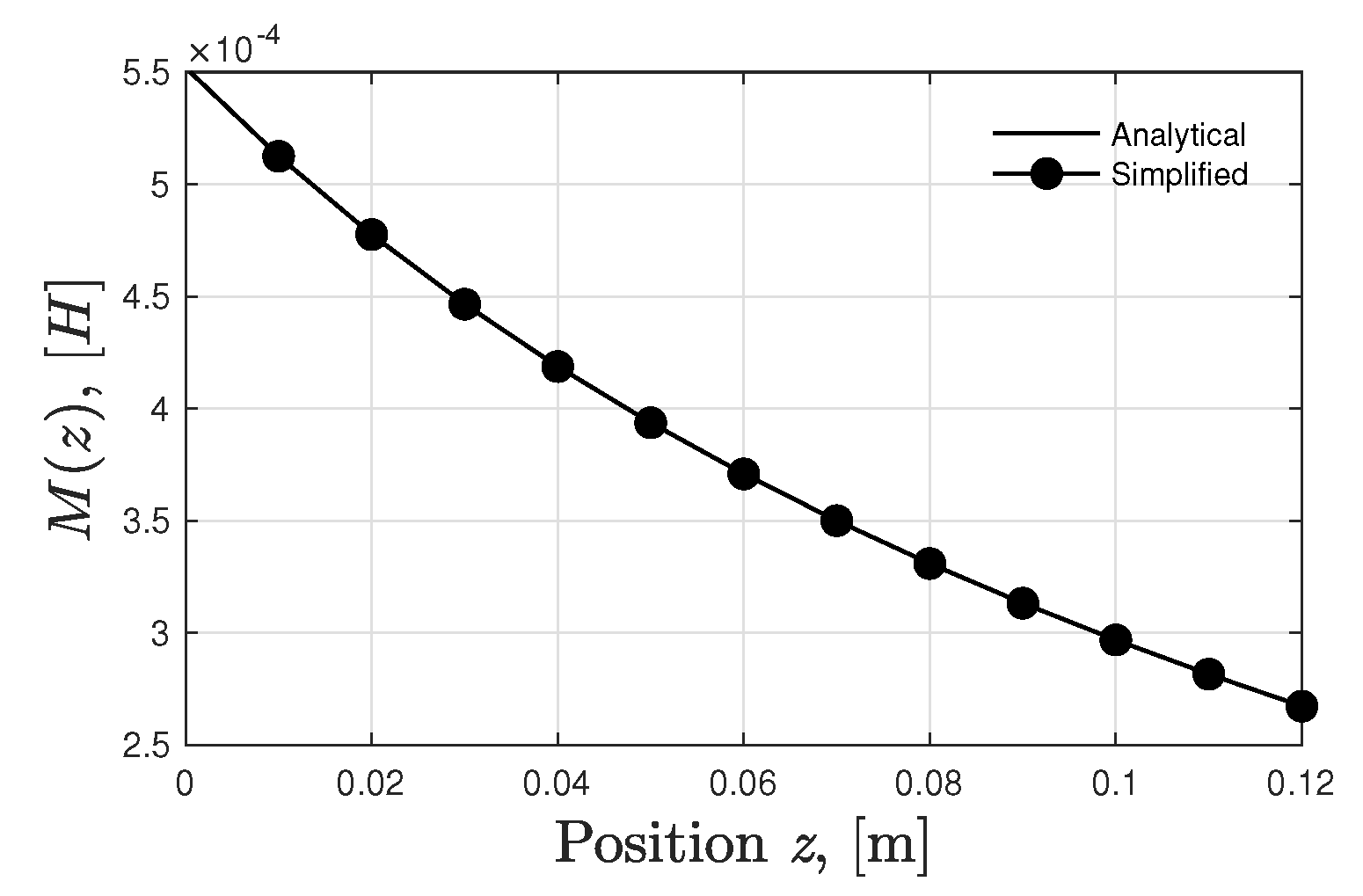
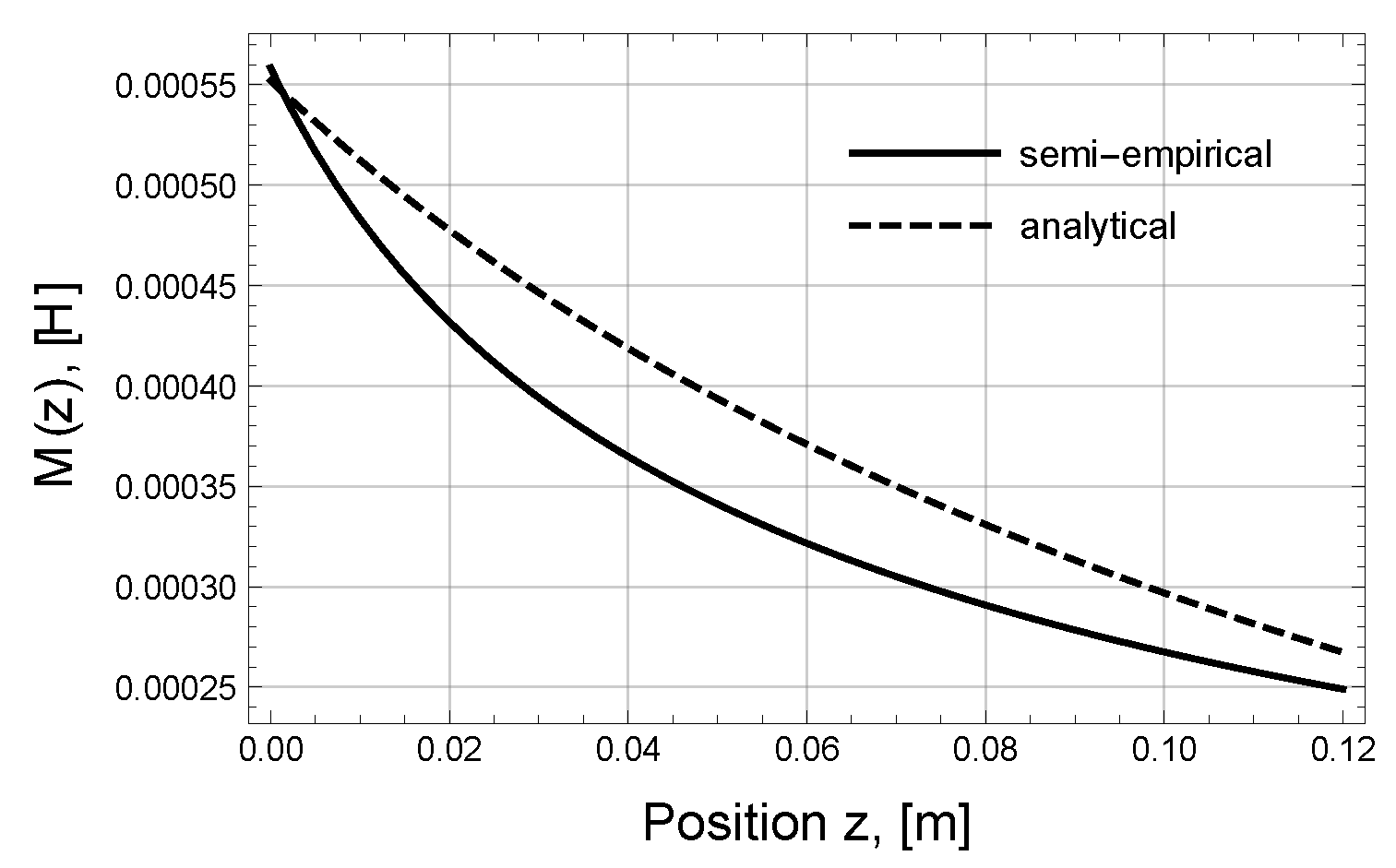
11) must be simplified. In
Figure 4, analytical behavior of the total inductance of the ring height is depicted. It can be seen in
Figure 4 that the total mutual inductance of the system can be approximated by exponential function as follows:
where
,
,
and
are some empirical parameters to be obtained by fitting function (
12) to the analytical result. The reason for the use of (
12), apart from reproducing qualitatively theoretical results (
9) and (
11), is that it provides a correct asymptotic behavior of the mutual inductance at large distances. A polynomial approximation would diverge at high distances. The numerical values of the parameters involved in (
12) can be obtained from (
9) and (
11) through the widely-used least squares method [
19]. As a result, the following values can be obtained:
H,
H,
m
−1 and
m
−1. The behavior of the simplified formula for mutual inductance is presented in
Figure 4. The precision of the approximation by (
12) is such that both curves (the analytical and simplified) are indistinguishable. Another advantage of the approximation (
12) is that it can be easily implemented in subsequent analytical calculations.
4. Analytical Solution
In this section, the asymptotic solution of the system of Equations (
5)–(
7) is found in steady state conditions. The smallness of the mutual inductance (see parameters
and
) makes possible the implementation of the perturbation theory (PT). This fact is emphasized using a small dimensionless parameter
, which is included in the set of Equations (
5)–(
7) as follows:
where the multiplier
next to the last term on the right-hand side of Equation (
15) has been placed in order to provide the existence of a bounded steady state solution to the equation system (
13)–(
15).
A harmonic input voltage in the primary circuit is assumed:
where
V and
are complex amplitudes (
is the complex conjugate of
V). Notice that Equation (
16) gives a cosine-form input voltage. Indeed, complex amplitude
V can be represented in the form:
, where
is the phase. Then,
. Substitution of these expressions into Equation (
16) yields:
. Although the input voltage is of the cosine form, higher harmonics in the currents
and
and the height
appear due to the fact that Equations (
13)–(
15) are nonlinear. According to PT, they can be expanded into a power series with respect to the small parameter
as follows:
where
, and
refers to the well-known Landau big-
notation.
(where
) and
are the
nth order PT contributions to the primary and secondary currents and the ring coordinate (height), respectively.
The substitution of the expansions (
17) and (
18) into the system (
13)–(
15) leads to an infinite chain of equations. According to PT, it can be truncated at a certain term. As a result, the zero order of PT yields:
The general solution to Equation (
21) is
where
and
are constants. In can be seen in (
22) that the unique steady state solution to Equation (
21) is
This solution represents the equilibrium position of the ring. The explicit form of will be found below for higher orders of PT.
After taking into account the solution (
23), the system of Equations (
13)–(
15) in the first order of PT becomes:
Finally, second order of PT leads to:
The input voltage (
16), in the dynamic equilibrium state, produces periodic currents
and a periodic coordinate
, so that each term of the expansions (
17) and (
18) can be in turn expanded respectively in Fourier series as follows:
where
and
are complex amplitudes. Equations (
17) and (
18) should be substituted into Equations (
19)–(
29), and the amplitudes of their respective harmonics should be equated in both parts of each equation. As a result, we will obtain a system of algebraic Equations that connect Fourier coefficients
and
with the input voltage amplitude
. Substitution of (
30) into Equations (
19) and (
20) yields:
The solutions to these equations are:
where
is the symbol of Kronecker. After substituting these results into (
30), the form of the currents in the time domain in the zero order of PT can be obtained:
Similarly, first and second orders of PT are calculated as:
Substitution of (
30) into Equation (
29) with solutions (
36)–(
42) taken into account results in the following equation after some simplifications:
Equation (
43) has a solution that linearly increases with time. To avoid this instability, it is necessary to equate the constant part on the right-hand side of (
43) to zero. As a result, the following equation can be obtained:
This equation associates the equilibrium height
with the input voltage amplitude
. In order to establish the dependence of the ring position on the input voltage amplitude, the simplified formula for mutual inductance (
12) should be substituted into Equation (
44). Therefore, we come across with the following transcendental equation:
which can be numerically solved with respect to the ring position.
After taking into account (
44), the solution to Equation (
43) can be found in the form:
The approximate time-behaviors of the currents
,
and the ring height
are finally as follows:

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}