
SheepIT, an E-Shepherd System for Weed Control in Vineyards: Experimental Results and Lessons Learned

 , , , , and
, , , , and
Abstract
:Simple Summary
Abstract
1. Introduction
2. Related Work
2.1. Animal Localization
2.2. Animal Monitoring
2.3. Behaviour Conditioning
3. SheepIT Project
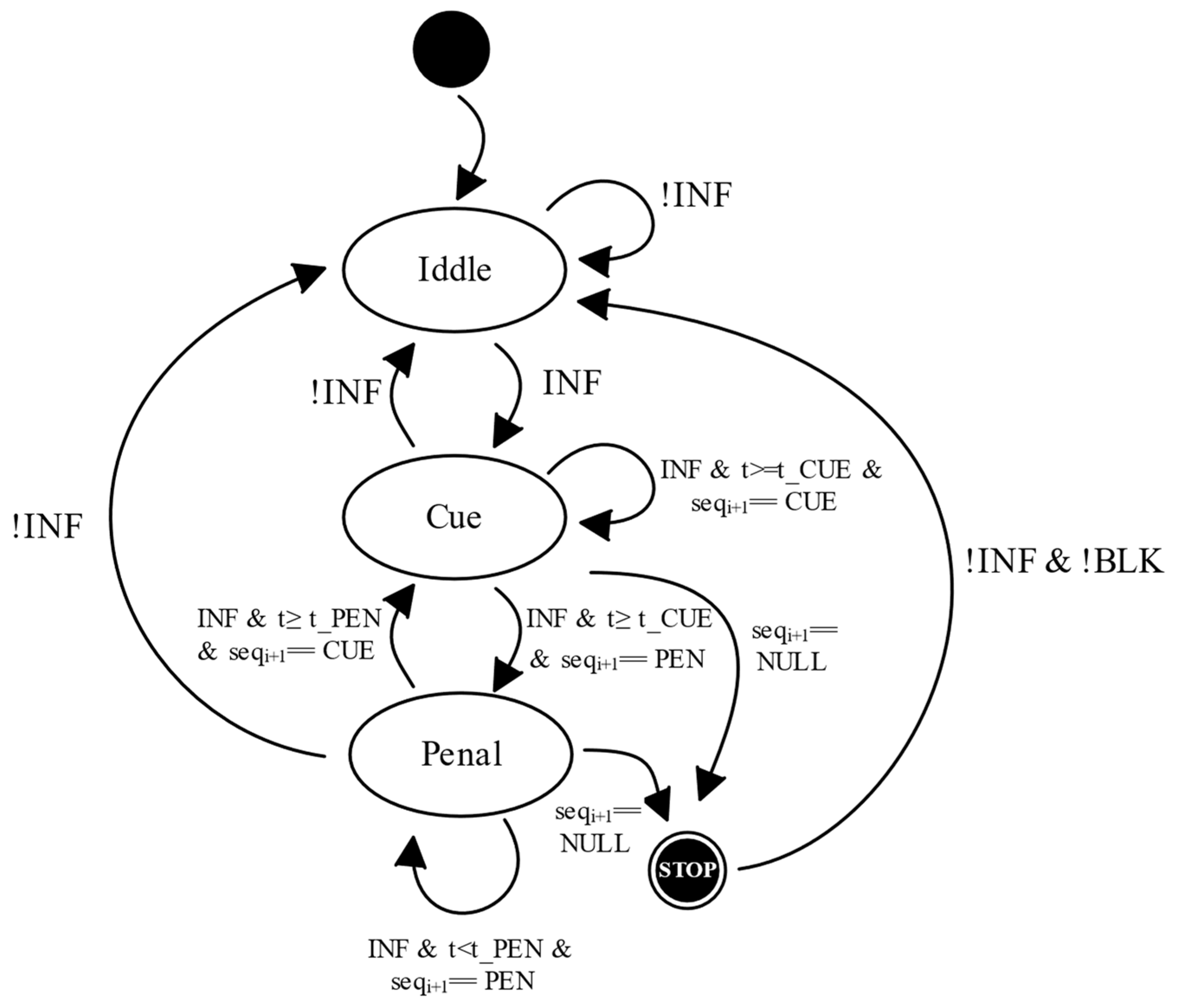
3.1. Posture Control
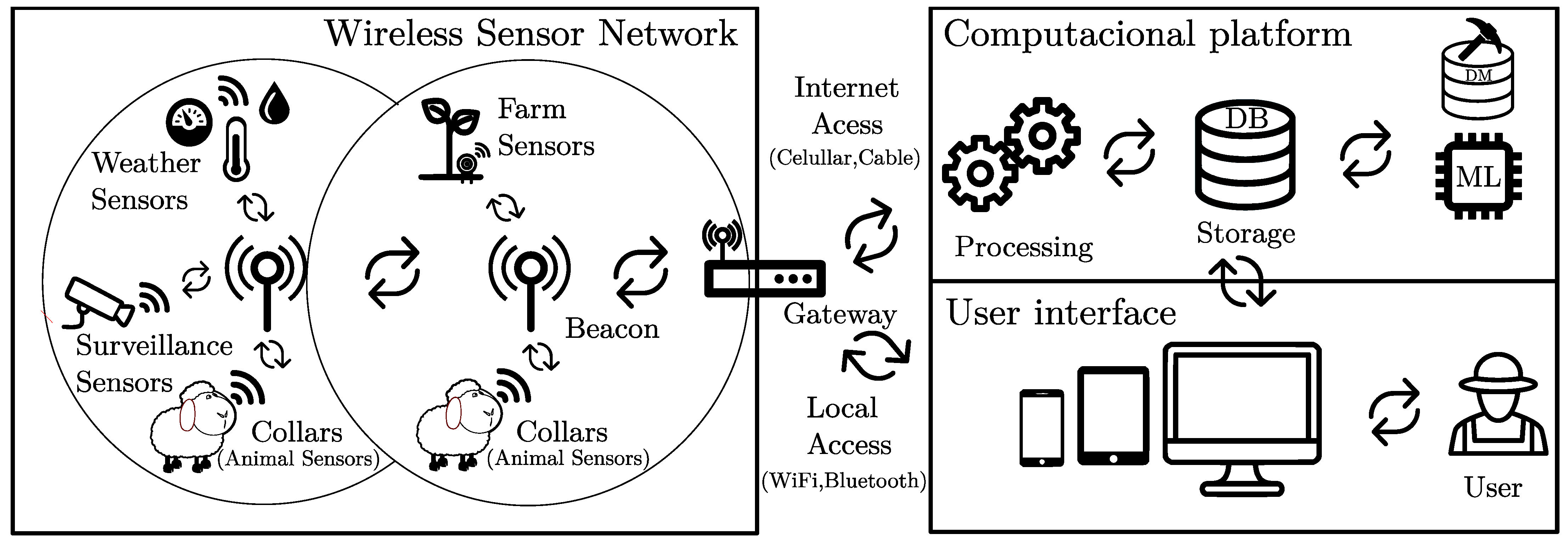
3.2. Wireless Sensor Network
3.3. Animal Localization Monitoring
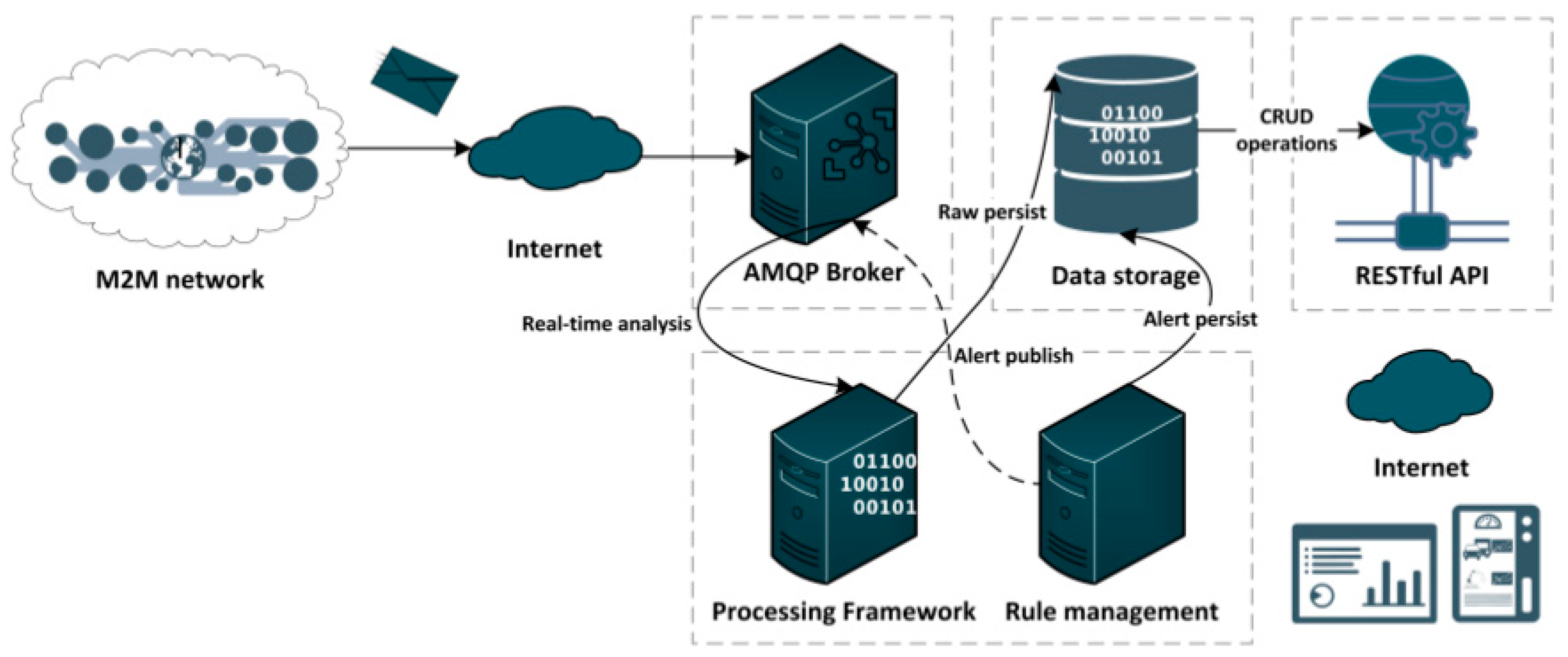
3.4. Cloud Computational Platform
4. Materials and Methods
4.1. Vineyard Parcel and Flock
4.2. Installed Platform
4.3. Grapevines Phenological Development and Leaf Count
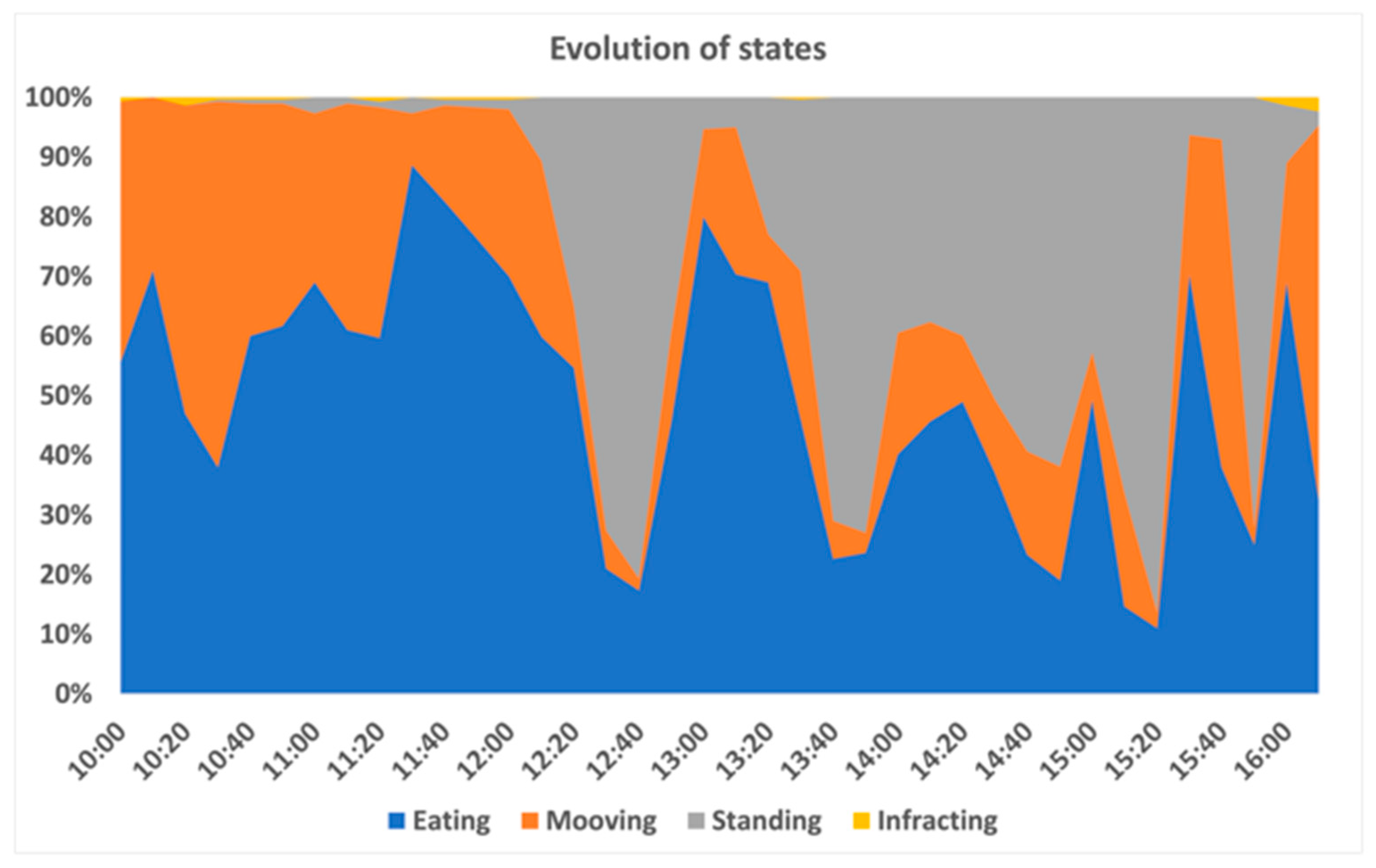
4.4. Animal Behaviour, Animal Location, Posture Control and Animal Well-Being
5. Results and Discussion
5.1. Posture Detection
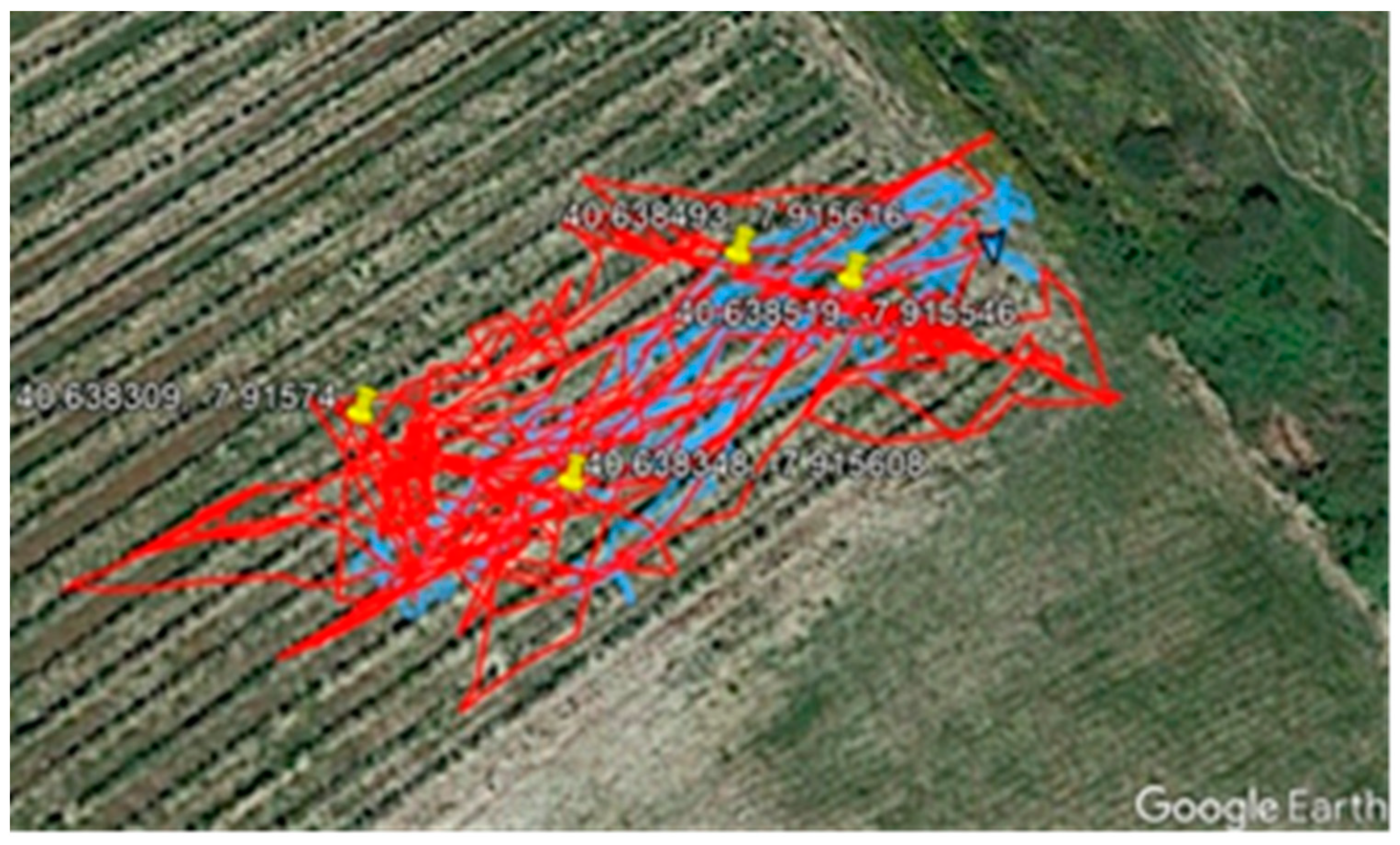
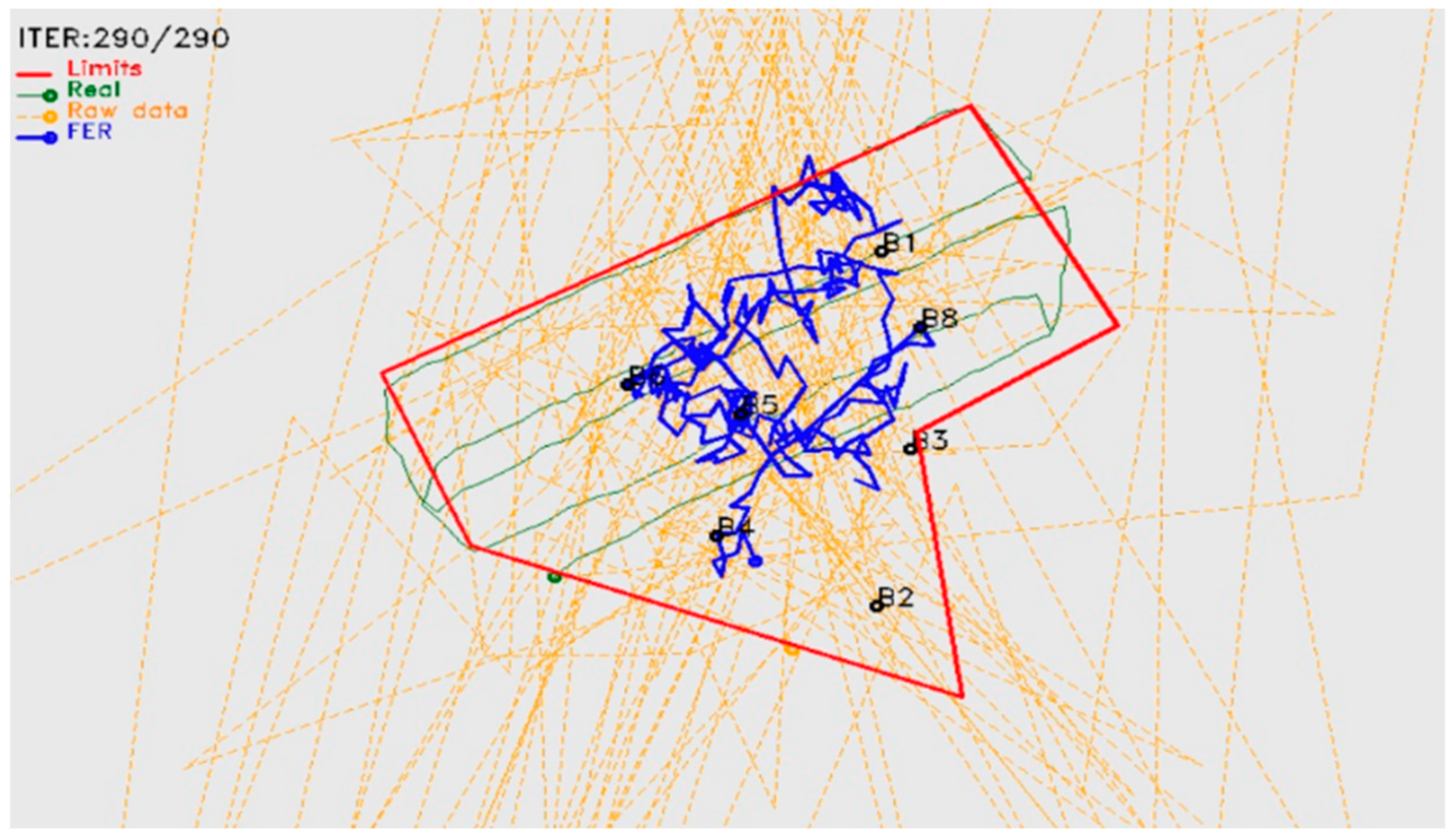
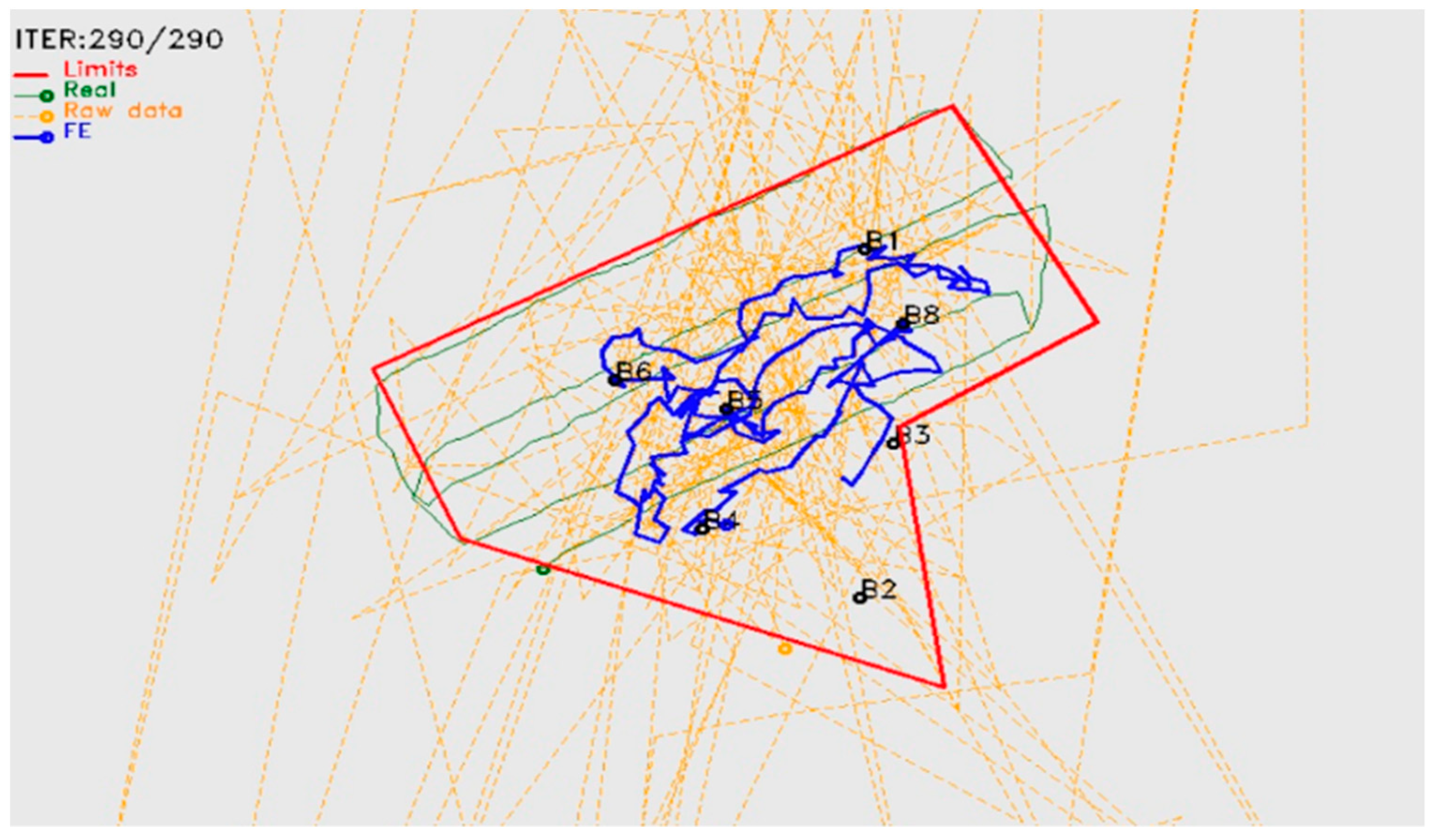
5.2. Animal Localization
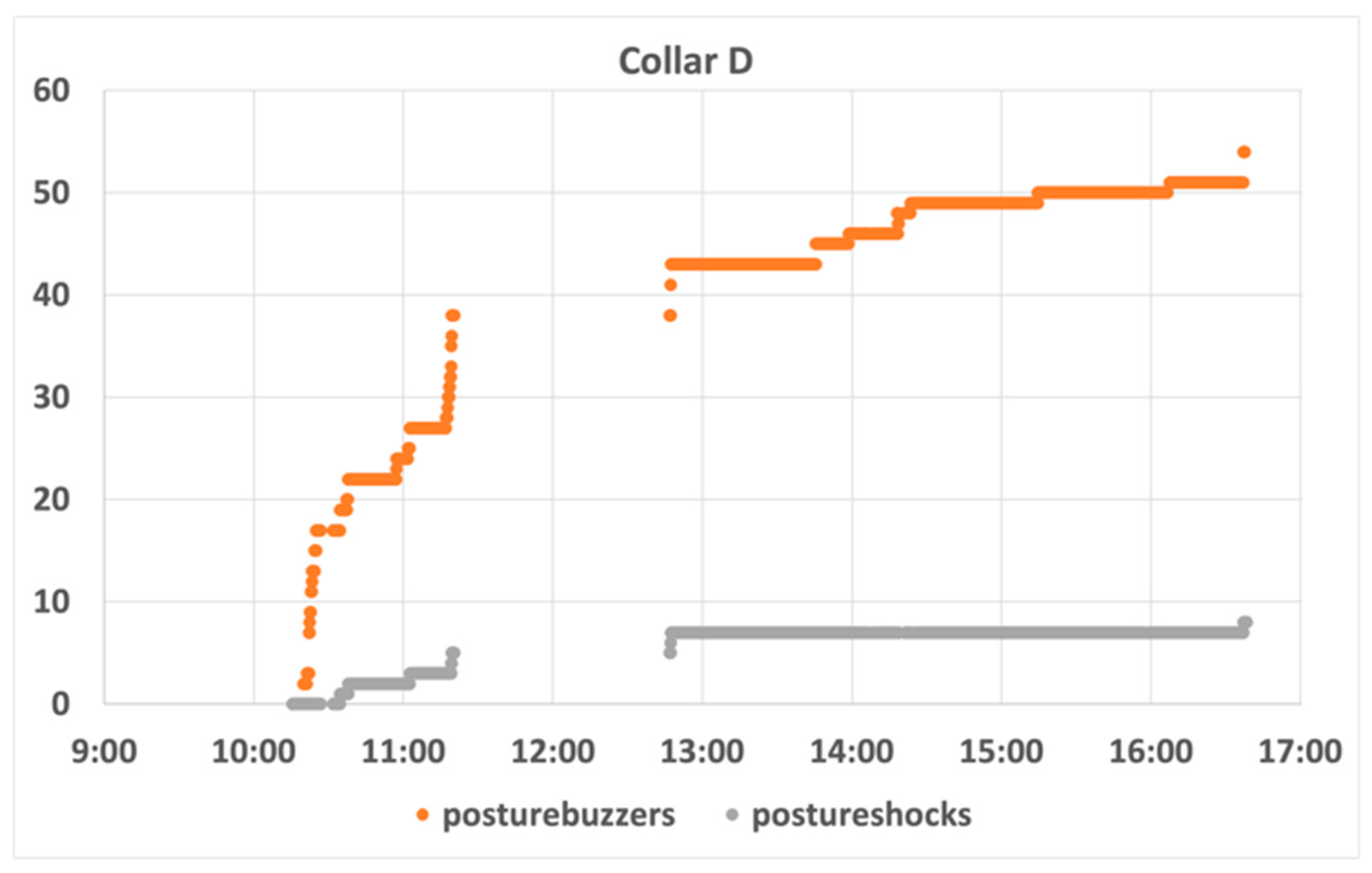
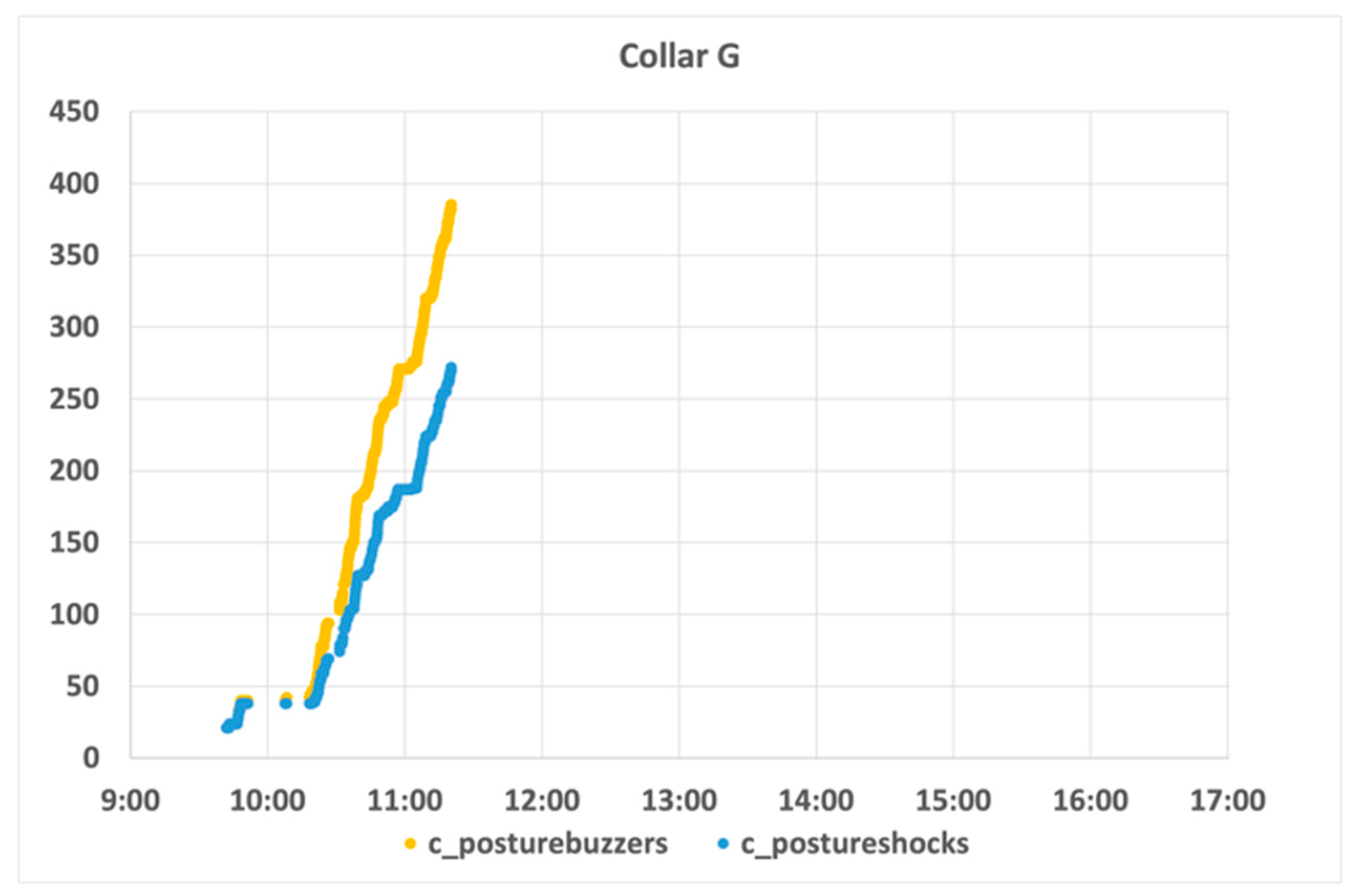
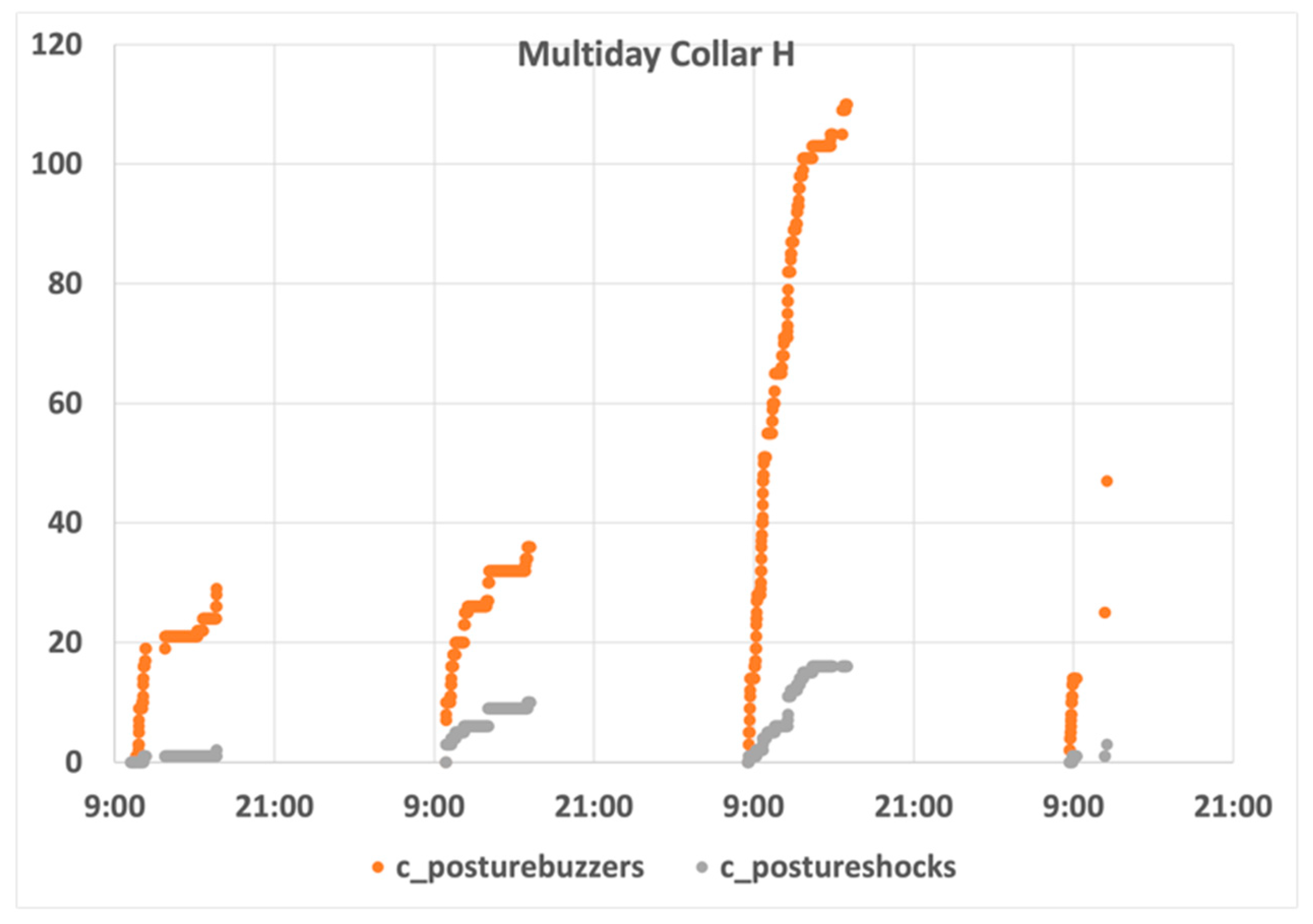
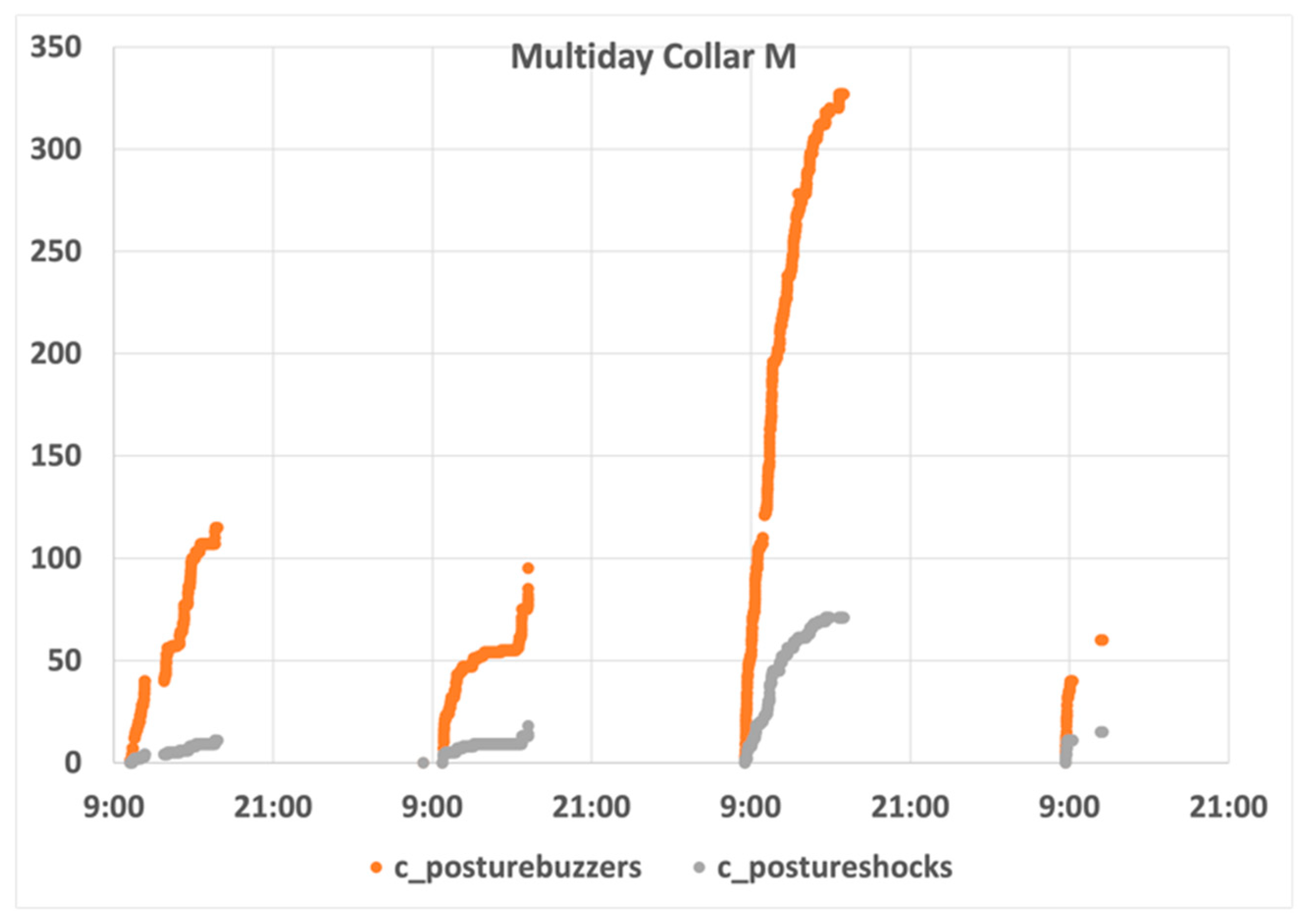
5.3. Posture Conditioning
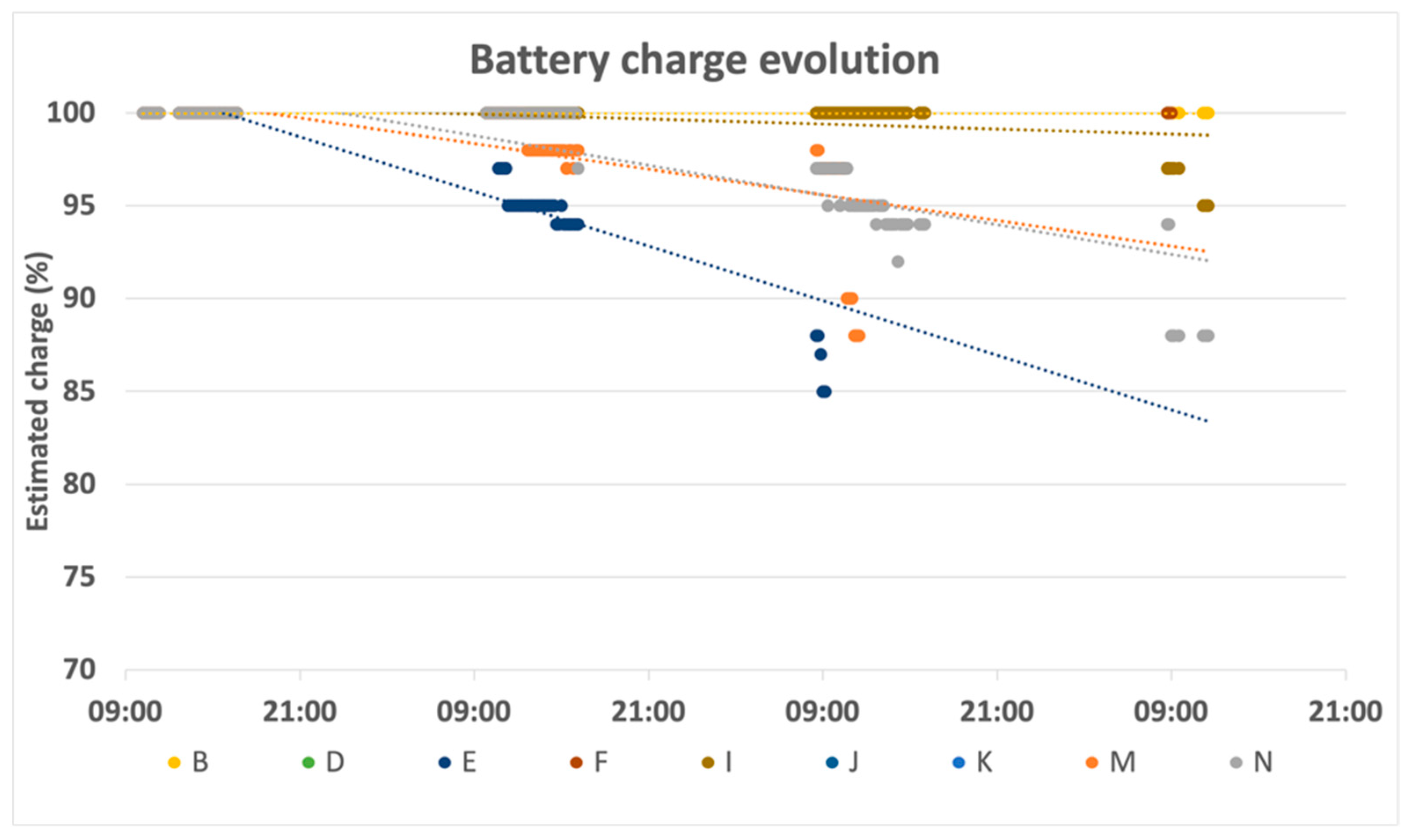
5.4. Power Consumption and System Autonomy
5.5. Animal Well-Being
5.6. Impact on Vine Leaves and on Phenology
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pergher, G.; Gubiani, R.; Mainardis, M. Field Testing of a Biomass-Fueled Flamer for In-Row Weed Control in the Vineyard. Agriculture 2019, 9, 210. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, M.; Skinkis, P. Are Your Weed-Control Products Damaging Nearby Vineyards? Oregon State University Extension Service: Corvallis, OR, USA, 2016. [Google Scholar]
- Dastgheib, F.; Frampton, C. Weed management practices in apple orchards and vineyards in the South Island of New Zealand. N. Zeal. J. Crop Hortic. Sci. 2000, 28, 53–58. [Google Scholar] [CrossRef] [Green Version]
- Bekkers, T. Weed control options for commercial organic vineyards. Tech. Rep. 2011, 62–64. Available online: http://www.tobybekkers.com/uploads/5/4/3/2/5432540/bekkers- julyaug11wvj.pdf (accessed on 29 June 2021).
- Nóbrega, L.; Gonçalves, P.; Pedreiras, P.; Pereira, J. An IoT-Based Solution for Intelligent Farming. Sensors 2019, 19, 603. [Google Scholar] [CrossRef] [Green Version]
- Kjellqvist, S. Determining Cattle Pasture Utilization Using GPS-Collars; SLU: Uppsala, Sweden, 2008. [Google Scholar]
- Turner, L.W.; Udal, M.C.; Larson, B.T.; Shearer, S.A. Monitoring cattle behavior and pasture use with GPS and GIS. Can. J. Anim. Sci. 2000, 80, 405–413. [Google Scholar] [CrossRef]
- Bowman, J.L.; Kochany, C.O.; Demarais, S.; Leopold, B.D. Evaluation of a GPS collar for white-tailed deer. Wildl. Soc. Bull. 2000, 28, 141–145. [Google Scholar] [CrossRef]
- Nathan, R.; Spiegel, O.; Fortmann-Roe, S.; Harel, R.; Wikelski, M.; Getz, W.M. Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: General concepts and tools illustrated for griffon vultures. J. Exp. Biol. 2012, 215, 986–996. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hunter, J.; Brooking, C.; Brimblecombe, W.; Dwyer, R.G.; Campbell, H.A.; Watts, M.E.; Franklin, C.E. OzTrack—E-Infrastructure to Support the Management, Analysis and Sharing of Animal Tracking Data. In Proceedings of the 2013 IEEE 9th International Conference on e-Science, Beijing, Chain, 22–25 October 2013; IEEE: Piscataway Township, NJ, USA, 2013; pp. 140–147. [Google Scholar]
- Rutter, S.M.; Beresford, N.A.; Roberts, G. Use of GPS to identify the grazing areas of hill sheep. Comput. Electron. Agric. 1997, 17, 177–188. [Google Scholar] [CrossRef]
- Nadimi, E.S.; Søgaard, H.T.; Bak, T.; Oudshoorn, F.W. ZigBee-based wireless sensor networks for monitoring animal presence and pasture time in a strip of new grass. Comput. Electron. Agric. 2008, 61, 79–87. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Mirazo, J.; Bishop-Hurley, G.J.; Swain, D.L. Automated Animal Control: Can Discontinuous Monitoring and Aversive Stimulation Modify Cattle Grazing Behavior? Rangel. Ecol. Manag. 2011, 64, 240–248. [Google Scholar] [CrossRef]
- Maroto-Molina, F.; Navarro-García, J.; Príncipe-Aguirre, K.; Gómez-Maqueda, I.; Guerrero-Ginel, J.E.; Garrido-Varo, A.; Pérez-Marín, D.C. A low-cost IOT-based system to monitor the location of a whole herd. Sensors 2019, 19, 2298. [Google Scholar] [CrossRef] [Green Version]
- Llaria, A.; Terrasson, G.; Arregui, H.; Hacala, A. Geolocation and Monitoring Platform for Extensive Farming in Mountain Pastures. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; Volume 2015, pp. 2420–2425. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. {ZigBee}-based wireless sensor network localization for cattle monitoring in grazing fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Thorstensen, B.; Syversen, T.; Bjørnvold, T.-A.; Walseth, T. Electronic Shepherd-a Low-Cost, Low-Bandwidth, Wireless Network system. In Proceedings of the 2nd international conference on Mobile Systems, Applications, and Services, Boston, MA, USA, 6–9 June 2004; ACM: Boston, MA, USA, 2004; pp. 245–255. [Google Scholar]
- Tnet, Tnet Smart Agriculture. Available online: https://www.tnet.it/en/iot-for-smart- agriculture (accessed on 6 January 2020).
- Agersens eShepherd®. Available online: https://www.agersens.com (accessed on 15 July 2020).
- Digitanimal GPS Animals Tracker—Tracking and Monitoring Livestock. Available online: https://digitanimal.pt (accessed on 15 July 2020).
- Nofense GPS-Baserte Virtuelle Gjerder for Geiter. Available online: http://www.nofence.no (accessed on 15 July 2020).
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine learning in agriculture: A review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [Green Version]
- Ortiz-Pelaez, A.; Pfeiffer, D.U. Use of data mining techniques to investigate disease risk classification as a proxy for compromised biosecurity of cattle herds in Wales. BMC Vet. Res. 2008, 4, 24. [Google Scholar] [CrossRef] [Green Version]
- Yin, L.; Hong, T.; Liu, C. Estrus Detection in Dairy Cows from Acceleration Data using Self-learning Classification Models. J. Comput. 2013, 8, 8. [Google Scholar] [CrossRef]
- Borchers, M.R.; Chang, Y.M.; Proudfoot, K.L.; Wadsworth, B.A.; Stone, A.E.; Bewley, J.M. Machine-learning-based calving prediction from activity, lying, and ruminating behaviors in dairy cattle. J. Dairy Sci. 2017, 100, 5664–5674. [Google Scholar] [CrossRef] [PubMed]
- Miller, G.A.; Mitchell, M.; Barker, Z.E.; Giebel, K.; Codling, E.A.; Amory, J.R.; Michie, C.; Davison, C.; Tachtatzis, C.; Andonovic, I.; et al. Using animal-mounted sensor technology and machine learning to predict time-to-calving in beef and dairy cows. Animal 2020, 14, 1304–1312. [Google Scholar] [CrossRef]
- Williams, M.L.; Mac Parthaláin, N.; Brewer, P.; James, W.P.; Rose, M.T. A novel behavioral model of the pasture-based dairy cow from GPS data using data mining and machine learning techniques. J. Dairy Sci. 2016, 99, 2063–2075. [Google Scholar] [CrossRef] [Green Version]
- Giovanetti, V.; Decandia, M.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. Automatic classification system for grazing, ruminating and resting behaviour of dairy sheep using a tri-axial accelerometer. Livest. Sci. 2017, 196, 42–48. [Google Scholar] [CrossRef]
- Decandia, M.; Giovanetti, V.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. The effect of different time epoch settings on the classification of sheep behaviour using tri-axial accelerometry. Comput. Electron. Agric. 2018, 154, 112–119. [Google Scholar] [CrossRef]
- Walton, E.; Casey, C.; Mitsch, J.; Vázquez-Diosdado, J.A.; Yan, J.; Dottorini, T.; Ellis, K.A.; Winterlich, A.; Kaler, J. Evaluation of sampling frequency, window size and sensor position for classification of sheep behaviour. R. Soc. Open Sci. 2018, 5, 171442. [Google Scholar] [CrossRef] [Green Version]
- Mansbridge, N.; Mitsch, J.; Bollard, N.; Ellis, K.; Miguel-Pacheco, G.G.; Dottorini, T.; Kaler, J. Feature selection and comparison of machine learning algorithms in classification of grazing and rumination behaviour in sheep. Sensors 2018, 18, 3532. [Google Scholar] [CrossRef] [Green Version]
- Barwick, J.; Lamb, D.W.; Dobos, R.; Welch, M.; Trotter, M. Categorising sheep activity using a tri-axial accelerometer. Comput. Electron. Agric. 2018, 145, 289–297. [Google Scholar] [CrossRef]
- Alvarenga, F.A.P.; Borges, I.; Palkovič, L.; Rodina, J.; Oddy, V.H.; Dobos, R.C. Using a three-axis accelerometer to identify and classify sheep behaviour at pasture. Appl. Anim. Behav. Sci. 2016, 181, 91–99. [Google Scholar] [CrossRef]
- Anderson, D.M. Virtual fencing–past, present and future. Rangel. J. 2007, 29, 65–78. [Google Scholar] [CrossRef]
- Schwager, M.; Anderson, D.M.; Butler, Z.; Rus, D. Robust classification of animal tracking data. Comput. Electron. Agric. 2007, 56, 46–59. [Google Scholar] [CrossRef]
- Howery, L.D.; Bailey, D.W.; Ruyle, G.B.; Renken, W.J. Cattle use visual cues to track food locations. Appl. Anim. Behav. Sci. 2000, 67, 1–14. [Google Scholar] [CrossRef]
- Swain, D.L.; Bishop-Hurley, G.J. Using contact logging devices to explore animal affiliations: Quantifying cow–calf interactions. Appl. Anim. Behav. Sci. 2007, 102, 1–11. [Google Scholar] [CrossRef]
- Jouven, M.; Leroy, H.; Ickowicz, A.; Lapeyronie, P. Can virtual fences be used to control grazing sheep? Rangel. J. 2012, 34, 111–123. [Google Scholar] [CrossRef]
- Lee, C.; Henshall, J.M.; Wark, T.J.; Crossman, C.C.; Reed, M.T.; Brewer, H.G.; O’Grady, J.; Fisher, A.D. Associative learning by cattle to enable effective and ethical virtual fences. Appl. Anim. Behav. Sci. 2009, 119, 15–22. [Google Scholar] [CrossRef]
- Schalke, E.; Stichnoth, J.; Ott, S.; Jones-Baade, R. Clinical signs caused by the use of electric training collars on dogs in everyday life situations. Appl. Anim. Behav. Sci. 2007, 105, 369–380. [Google Scholar] [CrossRef]
- Lee, C.; Fisher, A.D.; Reed, M.T.; Henshall, J.M. The effect of low energy electric shock on cortisol, β-endorphin, heart rate and behaviour of cattle. Appl. Anim. Behav. Sci. 2008, 113, 32–42. [Google Scholar] [CrossRef]
- Electronic Collar Manufacturers Association. Technical Requirements for Electronic Pet Training and Containment Collars; ECMA: Brussels, Belgium, 2008. [Google Scholar]
- Nóbrega, L.; Pedreiras, P.; Gonçalves, P. SheepIT, an IoT-Based Weed Control System. In Information and Communication Technologies in Modern Agricultural Development; Salampasis, M., Bournaris, T., Eds.; Springer International Publishing: Cham, Germany, 2019; pp. 131–147. ISBN 978-3-030-12998-9. [Google Scholar]
- Nóbrega, L.; Gonçalves, P.; Antunes, M.; Corujo, D. Assessing sheep behavior through low-power microcontrollers in smart agriculture scenarios, Computers and Electronics in Agriculture. Comput. Electron. Agric. 2020, 173, 105444. [Google Scholar] [CrossRef]
- Nobrega, L.; Pedreiras, P.; Goncalves, P.; Silva, S. Energy Efficient Design of a Pasture Sensor Network. In Proceedings of the 2017 IEEE 5th International Conference on Future Internet of Things and Cloud (FiCloud), Prague, Czech Republic, 21–23 August 2019; IEEE: Piscataway Township, NJ, USA, 2017; pp. 91–98. [Google Scholar]
- Guedes, R.; Pedreiras, P.; Nóbrega, L.; Gonçalves, P. Towards a low-cost localization system for small ruminants. Comput. Electron. Agric. 2021, 185, 106172. [Google Scholar] [CrossRef]
- Rostanski, M.; Grochla, K.; Seman, A. Evaluation of highly available and fault-tolerant middleware clustered architectures using RabbitMQ. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems (FedCSIS), Warsaw, Poland, 7–10 September 2014; IEEE: Piscataway Township, NJ, USA, 2014; pp. 879–884. [Google Scholar]
- Zaharia, M.; Xin, R.S.; Wendell, P.; Das, T.; Armbrust, M.; Dave, A.; Meng, X.; Rosen, J.; Venkataraman, S.; Franklin, M.J. Apache spark: A unified engine for big data processing. Commun. ACM 2016, 59, 56–65. [Google Scholar] [CrossRef]
- Proctor, M. Drools: A Rule Engine for Complex Event Processing. In International Symposium on Applications of Graph Transformations with Industrial Relevance; Springer: Berlin/Heidelberg, Germany; p. 2.
- Cameron, W.; Petrie, P.R.; Barlow, E.W.R.; Howell, K.; Jarvis, C.; Fuentes, S. A comparison of the effect of temperature on grapevine phenology between vineyards. OENO One 2021, 55, 301–320. [Google Scholar] [CrossRef]
- Ramos, M.C. Projection of phenology response to climate change in rainfed vineyards in north-east Spain. Agric. For. Meteorol. 2017, 247, 104–115. [Google Scholar] [CrossRef]
- Destrac-Irvine, A.; Reviews, G.B. And, vine, undefined n Floraison/BBCH 65-Stade I. IVES Tech. Rev. 2019. [Google Scholar] [CrossRef]
- Lorenz, D.H.; Eichhorn, K.W.; Bleiholder, H.; Klose, R.; Meier, U.; Weber, E. Growth Stages of the Grapevine: Phenological growth stages of the grapevine (Vitis vinifera L. ssp. vinifera)—Codes and descriptions according to the extended BBCH scale. Aust. J. Grape Wine Res. 1995, 1, 100–103. [Google Scholar] [CrossRef]
- Destrac Irvine, A.; Barbeau, G.; Resseguier, L.D.E.; Dufourcq, T.; Dumas, V.; Garcia Cortazar-atauri, I.D.E.; Genna, B.; Ojeda, H.; Saurin, N.; Van Leeuwen, C.; et al. Harmonising Grapevine Phenology Recording For Budburst And Flowering As Recommended By The Perpheclim Project. In Proceedings of the 19th Journées Internationales de Viticulture GiESCO, Gruissan, France, 31 May–5 June 2015; p. 810. [Google Scholar]
- Lopes, C.; Pinto, P.A. Easy and accurate estimation of grapevine leaf area with simple mathematical models. Vitis 2005, 44, 55–61. [Google Scholar]
- Cardoso, A.; Pereira, J.; Nóbrega, L.; Gonçalves, P.; Pedreiras, P.; Silva, V. SheepIT: Activity and Location Monitoring. In Proceedings of the INForum 2018—Simpósio de Informática, Coimbra, Portugal, 3–4 September 2018. [Google Scholar]
- Hargreaves, A.L.; Hutson, G.D. The stress response in sheep during routine handling procedures. Appl. Anim. Behav. Sci. 1990, 26, 83–90. [Google Scholar] [CrossRef]
- Caroprese, M.; Albenzio, M.; Marzano, A.; Schena, L.; Annicchiarico, G.; Sevi, A. Relationship between cortisol response to stress and behavior, immune profile, and production performance of dairy ewes. J. Dairy Sci. 2010, 93, 2395–2403. [Google Scholar] [CrossRef]
- Snoj, T.; Jenko, Z.; Cebulj-Kadunc, N. Fluctuations of serum cortisol, insulin and non-esterified fatty acid concentrations in growing ewes over the year. Ir. Vet. J. 2014, 67, 22. [Google Scholar] [CrossRef] [Green Version]
- Gatti, M.; Dosso, P.; Maurino, M.; Merli, M.C.; Bernizzoni, F.; Pirez, F.J.; Platè, B.; Bertuzzi, G.C.; Poni, S. MECS-VINE®: A new proximal sensor for segmented mapping of vigor and yield parameters on vineyard rows. Sensors 2016, 16, 2009. [Google Scholar] [CrossRef] [PubMed] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total of Leaves | Lost leaves | % | |
| 1d | 4555 | 32 | 0.7% |
| 2d | 4523 | 10 | 0.2% |
| 3d | 4513 | 11 | 0.2% |
| 4d | 4502 | 8 | 0.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonçalves, P.; Nóbrega, L.; Monteiro, A.; Pedreiras, P.; Rodrigues, P.; Esteves, F. SheepIT, an E-Shepherd System for Weed Control in Vineyards: Experimental Results and Lessons Learned. Animals 2021, 11, 2625. https://doi.org/10.3390/ani11092625
Gonçalves P, Nóbrega L, Monteiro A, Pedreiras P, Rodrigues P, Esteves F. SheepIT, an E-Shepherd System for Weed Control in Vineyards: Experimental Results and Lessons Learned. Animals. 2021; 11(9):2625. https://doi.org/10.3390/ani11092625
Chicago/Turabian StyleGonçalves, Pedro, Luís Nóbrega, António Monteiro, Paulo Pedreiras, Pedro Rodrigues, and Fernando Esteves. 2021. "SheepIT, an E-Shepherd System for Weed Control in Vineyards: Experimental Results and Lessons Learned" Animals 11, no. 9: 2625. https://doi.org/10.3390/ani11092625
APA StyleGonçalves, P., Nóbrega, L., Monteiro, A., Pedreiras, P., Rodrigues, P., & Esteves, F. (2021). SheepIT, an E-Shepherd System for Weed Control in Vineyards: Experimental Results and Lessons Learned. Animals, 11(9), 2625. https://doi.org/10.3390/ani11092625