Modelling and Validation of Computer Vision Techniques to Assess Heart Rate, Eye Temperature, Ear-Base Temperature and Respiration Rate in Cattle


 ,
,  ,
,  , and
, and
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Site and Animals Description
2.2. Data Acquisition and Computer Vision Analysis
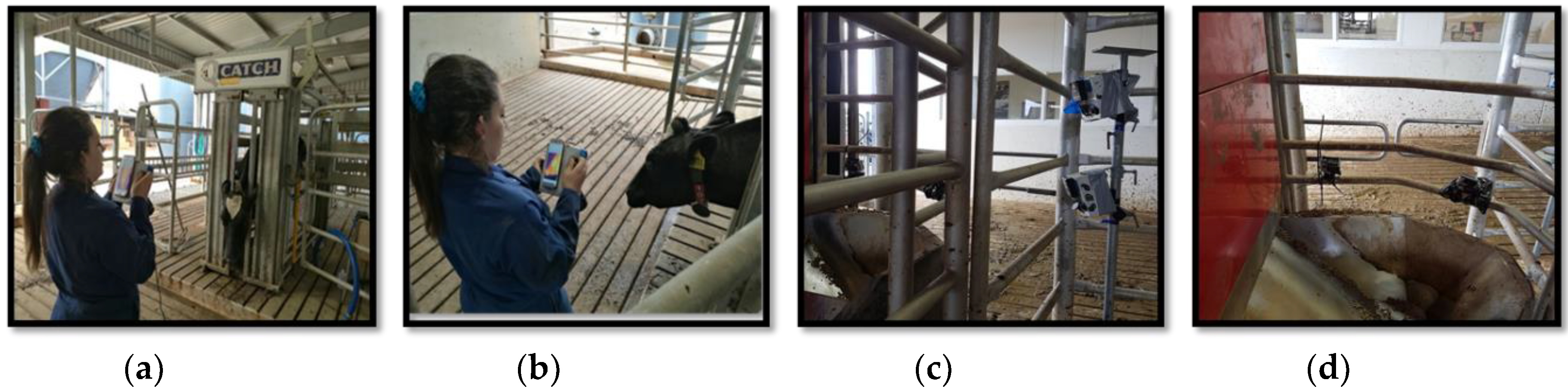
2.2.1. Cameras Description
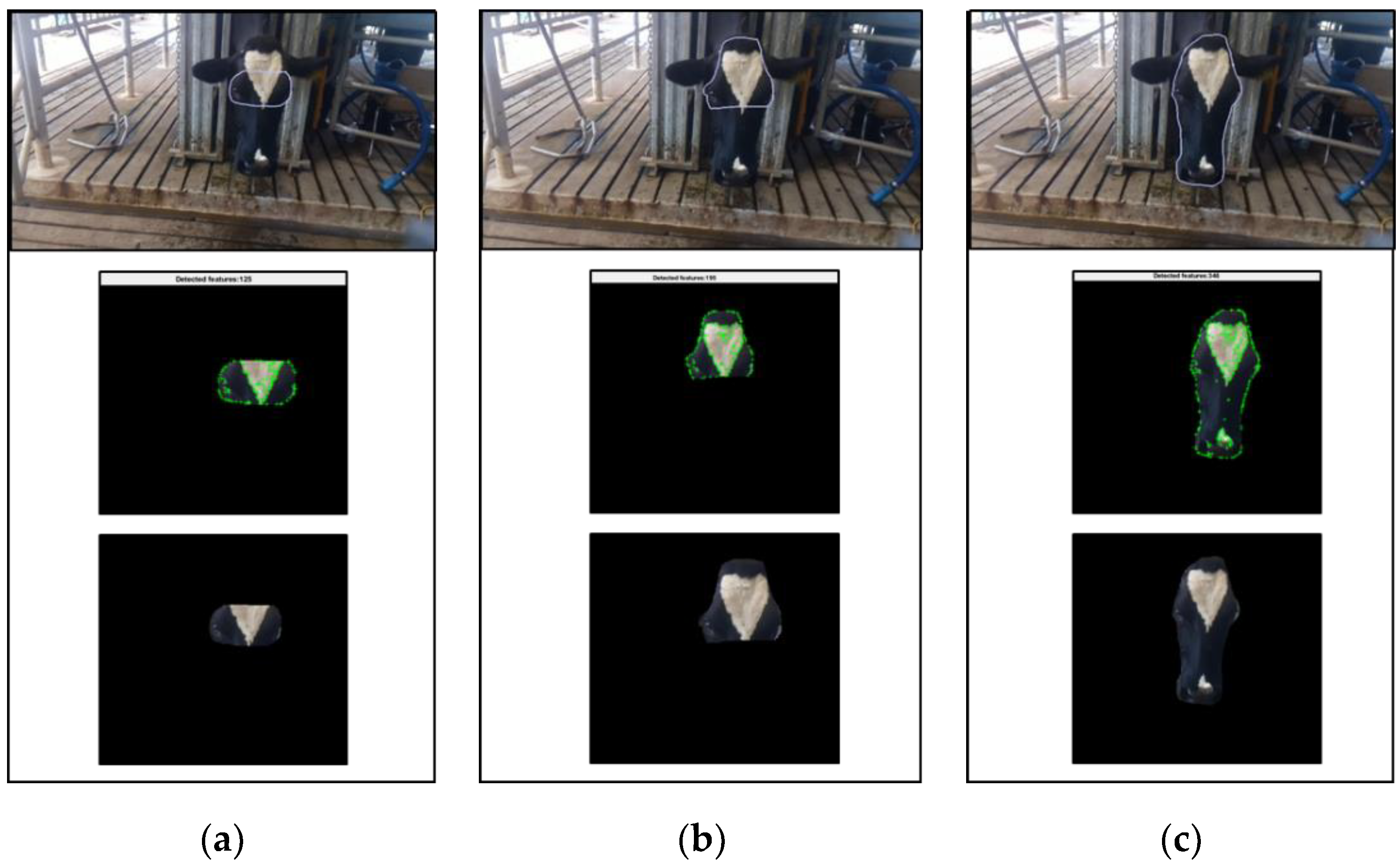
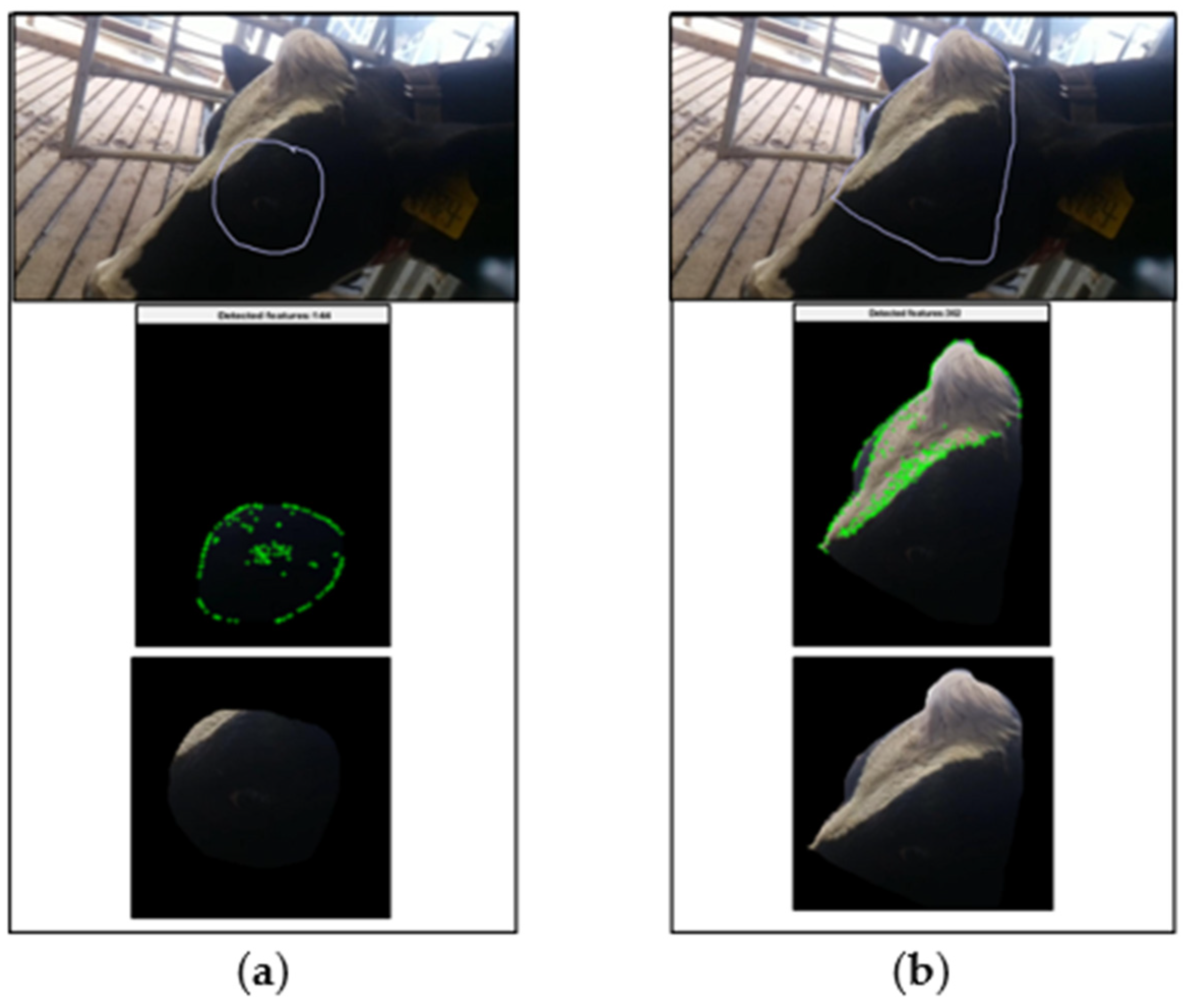
2.2.2. Feature Tracking Technique
2.2.3. Image Analysis
2.2.4. Data Collected
2.2.5. Experiment Procedures
2.3. Statistical Analysis
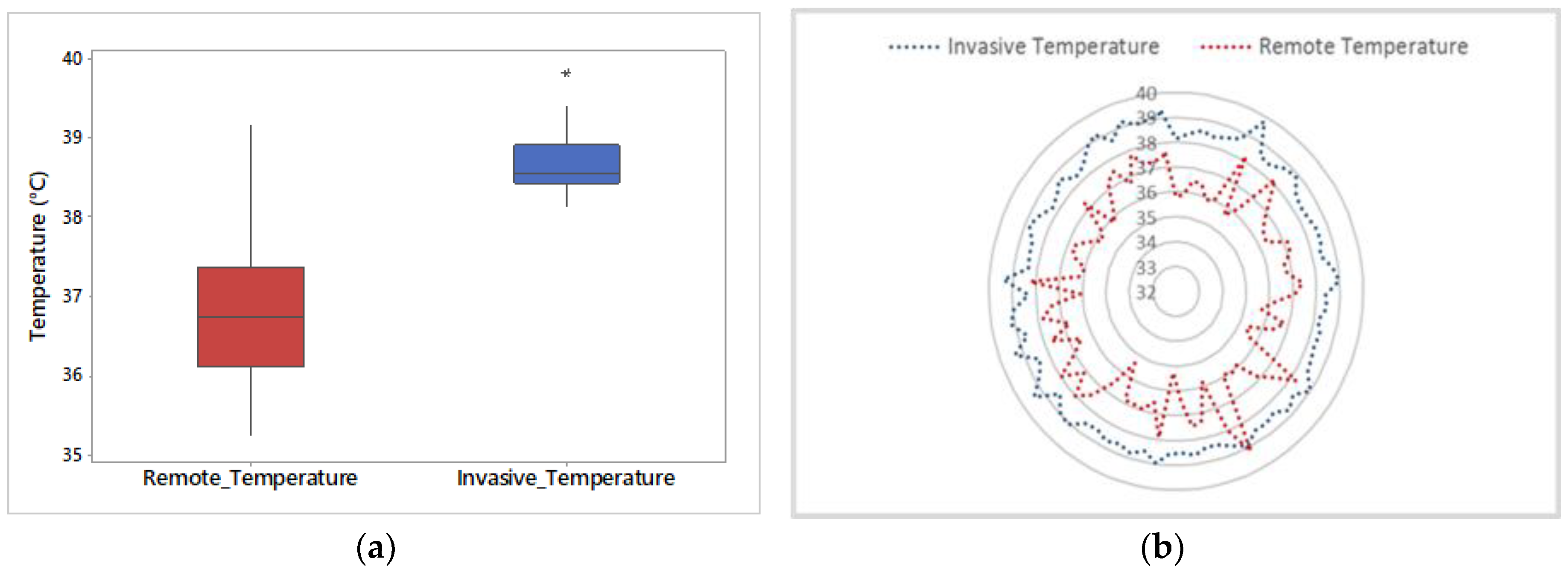
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tullo, E.; Finzi, A.; Guarino, M. Environmental impact of livestock farming and precision livestock farming as a mitigation strategy. Sci. Total Environ. 2019, 650, 2751–2760. [Google Scholar] [CrossRef] [PubMed]
- Norton, T.; Berckmans, D. Engineering advances in precision livestock farming. Biosyst. Eng. 2018, 173, 1–3. [Google Scholar] [CrossRef]
- Matthews, S.G.; Miller, A.L.; Plötz, T.; Kyriazakis, I. Automated tracking to measure behavioural changes in pigs for health and welfare monitoring. Sci. Rep. 2017, 7, 17582. [Google Scholar] [CrossRef] [PubMed]
- Tscharke, M.; Banhazi, T.M. A brief review of the application of machine vision in livestock behaviour analysis. Agrárinformatika/J. Agric. Informa. 2016, 7, 23–42. [Google Scholar]
- Barbosa Pereira, C.; Kunczik, J.; Zieglowski, L.; Tolba, R.; Abdelrahman, A.; Zechner, D.; Vollmar, B.; Janssen, H.; Thum, T.; Czaplik, M. Remote welfare monitoring of rodents using thermal imaging. Sensors 2018, 18, 3653. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoffmann, G.; Schmidt, M.; Ammon, C.; Rose-Meierhöfer, S.; Burfeind, O.; Heuwieser, W.; Berg, W. Monitoring the body temperature of cows and calves using video recordings from an infrared thermography camera. Vet. Res. Commun. 2013, 37, 91–99. [Google Scholar] [CrossRef] [PubMed]
- Van Hertem, T.; Lague, S.; Rooijakkers, L.; Vranken, E. Towards a sustainable meat production with precision livestock farming. In Proceedings of the Food System Dynamics, Innsbruck-Igls, Austria, 15–19 February 2016; pp. 357–362. [Google Scholar]
- Vainer, B.G. A novel high-resolution method for the respiration rate and breathing waveforms remote monitoring. Ann. Biomed. Eng. 2018, 46, 960–971. [Google Scholar] [CrossRef]
- Takano, C.; Ohta, Y. Heart rate measurement based on a time-lapse image. Med. Eng. Phys. 2007, 29, 853–857. [Google Scholar] [CrossRef]
- Strutzke, S.; Fiske, D.; Hoffmann, G.; Ammon, C.; Heuwieser, W.; Amon, T. Development of a noninvasive respiration rate sensor for cattle. J. Dairy Sci. 2019, 102, 690–695. [Google Scholar] [CrossRef] [Green Version]
- George, W.; Godfrey, R.; Ketring, R.; Vinson, M.; Willard, S. Relationship among eye and muzzle temperatures measured using digital infrared thermal imaging and vaginal and rectal temperatures in hair sheep and cattle. J. Anim. Sci. 2014, 92, 4949–4955. [Google Scholar] [CrossRef] [Green Version]
- Andrade, O.; Orihuela, A.; Solano, J.; Galina, C. Some effects of repeated handling and the use of a mask on stress responses in zebu cattle during restraint. Appl. Anim. Behav. Sci. 2001, 71, 175–181. [Google Scholar] [CrossRef]
- Selevan, J. Method and Apparatus for Determining Heart Rate. U.S. Patent Application No. 10/859,789, 3 June 2004. [Google Scholar]
- Vermeulen, L.; Van de Perre, V.; Permentier, L.; De Bie, S.; Geers, R. Pre-slaughter rectal temperature as an indicator of pork meat quality. Meat Sci. 2015, 105, 53–56. [Google Scholar] [CrossRef] [PubMed]
- Neethirajan, S. Recent advances in wearable sensors for animal health management. Sens. Bio-Sens. Res. 2017, 12, 15–29. [Google Scholar] [CrossRef] [Green Version]
- Pastell, M.; Kaihilahti, J.; Aisla, A.-M.; Hautala, M.; Poikalainen, V.; Ahokas, J. A system for contact-free measurement of respiration rate of dairy cows. Precis. Livest. Farm. 2007, 7, 105–109. [Google Scholar]
- Zhao, F.; Li, M.; Qian, Y.; Tsien, J.Z. Remote measurements of heart and respiration rates for telemedicine. PLoS ONE 2013, 8, e71384. [Google Scholar] [CrossRef] [Green Version]
- Rocha, L.M. Validation of Stress Indicators for the Assessment of Animal Welfare and Prediction of Pork Meat Quality Variation at Commercial level. Ph.D. Thesis, Université Laval, Québec, QC, Canada, 2016. [Google Scholar]
- Soerensen, D.D.; Pedersen, L.J. Infrared skin temperature measurements for monitoring health in pigs: A review. Acta Vet. Scand. 2015, 57, 5. [Google Scholar] [CrossRef] [Green Version]
- Alsaaod, M.; Schaefer, A.; Büscher, W.; Steiner, A. The role of infrared thermography as a non-invasive tool for the detection of lameness in cattle. Sensors 2015, 15, 14513–14525. [Google Scholar] [CrossRef] [Green Version]
- Janžekovič, M.; Muršec, B.; Janžekovič, I. Techniques of measuring heart rate in cattle. Tehnički Vjesnik 2006, 13, 31–37. [Google Scholar]
- Jukan, A.; Masip-Bruin, X.; Amla, N. Smart computing and sensing technologies for animal welfare: A systematic review. ACM Comput. Surv. (CSUR) 2017, 50, 10. [Google Scholar] [CrossRef] [Green Version]
- Irani, R.; Nasrollahi, K.; Moeslund, T.B. Improved pulse detection from head motions using dct. In Proceedings of the 2014 International Conference on Computer Vision Theory and Applications (VISAPP), Lisbon, Portugal, 5–8 January 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 118–124. [Google Scholar]
- Wei, L.; Tian, Y.; Wang, Y.; Ebrahimi, T.; Huang, T. Automatic webcam-based human heart rate measurements using laplacian eigenmap. In Proceedings of the Asian Conference on Computer Vision, Daejeon, Korea, 5–9 November 2012; Springer: Berlin, Germany, 2012; pp. 281–292. [Google Scholar]
- Sikdar, A.; Behera, S.K.; Dogra, D.P. Computer-vision-guided human pulse rate estimation: A review. IEEE Rev. Biomed. Eng. 2016, 9, 91–105. [Google Scholar] [CrossRef]
- Viejo, C.G.; Fuentes, S.; Torrico, D.D.; Dunshea, F.R. Non-contact heart rate and blood pressure estimations from video analysis and machine learning modelling applied to food sensory responses: A case study for chocolate. Sensors 2018, 18, 1802. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Poh, M.-Z.; McDuff, D.J.; Picard, R.W. Non-contact, automated cardiac pulse measurements using video imaging and blind source separation. Opt. Express 2010, 18, 10762–10774. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Chen, J.; Zhao, G.; Pietikainen, M. Remote heart rate measurement from face videos under realistic situations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4264–4271. [Google Scholar]
- Wang, W.; Stuijk, S.; De Haan, G. Exploiting spatial redundancy of image sensor for motion robust rppg. IEEE Trans. Biomed. Eng. 2015, 62, 415–425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbosa Pereira, C.; Czaplik, M.; Blazek, V.; Leonhardt, S.; Teichmann, D. Monitoring of cardiorespiratory signals using thermal imaging: A pilot study on healthy human subjects. Sensors 2018, 18, 1541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stewart, M.; Wilson, M.; Schaefer, A.; Huddart, F.; Sutherland, M. The use of infrared thermography and accelerometers for remote monitoring of dairy cow health and welfare. J. Dairy Sci. 2017, 100, 3893–3901. [Google Scholar] [CrossRef]
- Bernard, V.; Staffa, E.; Mornstein, V.; Bourek, A. Infrared camera assessment of skin surface temperature–effect of emissivity. Phys. Med. 2013, 29, 583–591. [Google Scholar] [CrossRef] [Green Version]
- Hadžić, V.; Širok, B.; Malneršič, A.; Čoh, M. Can infrared thermography be used to monitor fatigue during exercise? A case study. J. Sport Health Sci. 2019, 8, 89–92. [Google Scholar] [CrossRef]
- Litscher, G.; Ofner, M.; Litscher, D. Manual khalifa therapy in patients with completely ruptured anterior cruciate ligament in the knee: First preliminary results from thermal imaging. N. Am. J. Med. Sci. 2013, 5, 473–479. [Google Scholar] [CrossRef]
- Frize, M.; Adéa, C.; Payeur, P.; Gina Di Primio, M.; Karsh, J.; Ogungbemile, A. Detection of Rheumatoid Arthritis Using Infrared Imaging. In Medical Imaging 2011: Image Processing; Dawant, B.M., Haynor, D.R., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; p. 79620M. [Google Scholar]
- Metzner, M.; Sauter-Louis, C.; Seemueller, A.; Petzl, W.; Klee, W. Infrared thermography of the udder surface of dairy cattle: Characteristics, methods, and correlation with rectal temperature. Vet. J. 2014, 199, 57–62. [Google Scholar] [CrossRef]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; IEEE: Piscataway, NJ, USA, 1994; pp. 593–600. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin, Germany, 2006; pp. 404–417. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R. Brisk: Binary robust invariant scalable keypoints. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2548–2555. [Google Scholar]
- Rosten, E.; Drummond, T. Fusing points and lines for high performance tracking. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV), Beijing, China, 17–21 October 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 1508–1515. [Google Scholar]
- Harris, C.G.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 1 August–2 September 1988. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the International Conference on Computer Vision & Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’01), Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Kim, T.; Kim, S. Pedestrian detection at night time in fir domain: Comprehensive study about temperature and brightness and new benchmark. Pattern Recognit. 2018, 79, 44–54. [Google Scholar] [CrossRef]
- Rashid, T.; Khawaja, H.A.; Edvardsen, K. Measuring thickness of marine ice using ir thermography. Cold Reg. Sci. Technol. 2019, 158, 221–229. [Google Scholar] [CrossRef]
- Schaefer, A.L.; Cook, N.; Tessaro, S.V.; Deregt, D.; Desroches, G.; Dubeski, P.L.; Tong, A.K.W.; Godson, D.L. Early detection and prediction of infection using infrared thermography. Can. J. Anim. Sci. 2004, 84, 73–80. [Google Scholar] [CrossRef]
- Schmidt, M.; Lahrmann, K.-H.; Ammon, C.; Berg, W.; Schön, P.; Hoffmann, G. Assessment of body temperature in sows by two infrared thermography methods at various body surface locations. J. Swine Health Prod. 2013, 21, 203–209. [Google Scholar]
- Burdick, N.; Carroll, J.; Dailey, J.; Randel, R.; Falkenberg, S.; Schmidt, T. Development of a self-contained, indwelling vaginal temperature probe for use in cattle research. J. Therm. Biol. 2012, 37, 339–343. [Google Scholar] [CrossRef]
- Wenzel, C.; Schönreiter-Fischer, S.; Unshelm, J. Studies on step–kick behavior and stress of cows during milking in an automatic milking system. Livest. Prod. Sci. 2003, 83, 237–246. [Google Scholar] [CrossRef]
- Janzekovic, M.; Stajnko, D.; Brus, M.; Vindis, P. Advanced Knowledge Application in Practice; Fuerstner, I., Ed.; Sciyo: Rijeka, Croatia, 2010; Chapter 9; pp. 157–172. [Google Scholar]
- Miwa, M.; Oishi, K.; Nakagawa, Y.; Maeno, H.; Anzai, H.; Kumagai, H.; Okano, K.; Tobioka, H.; Hirooka, H. Application of overall dynamic body acceleration as a proxy for estimating the energy expenditure of grazing farm animals: Relationship with heart rate. PLoS ONE 2015, 10, e0128042. [Google Scholar] [CrossRef] [PubMed]
- Bourguet, C.; Deiss, V.; Gobert, M.; Durand, D.; Boissy, A.; Terlouw, E.C. Characterising the emotional reactivity of cows to understand and predict their stress reactions to the slaughter procedure. Appl. Anim. Behav. Sci. 2010, 125, 9–21. [Google Scholar] [CrossRef]
- Hopster, H.; Blokhuis, H.J. Validation of a heart-rate monitor for measuring a stress response in dairy cows. Can. J. Anim. Sci. 1994, 74, 465–474. [Google Scholar] [CrossRef]
- Guo, Y.-Z.; Zhu, W.-X.; Jiao, P.-P.; Ma, C.-H.; Yang, J.-J. Multi-object extraction from topview group-housed pig images based on adaptive partitioning and multilevel thresholding segmentation. Biosyst. Eng. 2015, 135, 54–60. [Google Scholar] [CrossRef]
- Burghardt, T.; Calic, J. Real-time face detection and tracking of animals. In Proceedings of the 2006 8th Seminar on Neural Network Applications in Electrical Engineering, Belgrade/Montenegro, Serbia, 25–27 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 27–32. [Google Scholar]
- Taheri, S.; Toygar, Ö. Animal classification using facial images with score-level fusion. IET Comput. Vis. 2018, 12, 679–685. [Google Scholar] [CrossRef]
- Jaddoa, M.A.; Al-Jumaily, A.; Gonzalez, L.; Cuthbertson, H. Automatic eyes localization in thermal images for temperature measurement in cattle. In Proceedings of the 2017 12th International Conference on Intelligent Systems and Knowledge Engineering (ISKE), Nanjing, China, 24–26 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Magee, D.R. Machine Vision Techniques for the Evaluation of Animal Behaviour. Ph.D. Thesis, The University of Leeds, Leeds, UK, 2001. [Google Scholar]
- Stewart, M.; Stafford, K.; Dowling, S.; Schaefer, A.; Webster, J. Eye temperature and heart rate variability of calves disbudded with or without local anaesthetic. Physiol. Behav. 2008, 93, 789–797. [Google Scholar] [CrossRef] [PubMed]
- Church, J.S.; Hegadoren, P.; Paetkau, M.; Miller, C.; Regev-Shoshani, G.; Schaefer, A.; Schwartzkopf-Genswein, K. Influence of environmental factors on infrared eye temperature measurements in cattle. Res. Vet. Sci. 2014, 96, 220–226. [Google Scholar] [CrossRef] [PubMed]
- Martello, L.S.; da Luz E Silva, S.; da Costa Gomes, R.; da Silva Corte, R.R.; Leme, P.R. Infrared thermography as a tool to evaluate body surface temperature and its relationship with feed efficiency in bos indicus cattle in tropical conditions. Int. J. Biometeorol. 2016, 60, 173–181. [Google Scholar] [CrossRef] [PubMed]
- Tabuaciri, P.; Bunter, K.L.; Graser, H.-U. Thermal imaging as a potential tool for identifying piglets at risk. In Proceedings of the AGBU Pig Genetics Workshop, 24 October 2012; Animal Genetics and Breeding Unit, University of New England: Armidale, Australia, 2012; pp. 23–30. [Google Scholar]
- Marchant-Forde, R.; Marlin, D.; Marchant-Forde, J. Validation of a cardiac monitor for measuring heart rate variability in adult female pigs: Accuracy, artefacts and editing. Physiol. Behav. 2004, 80, 449–458. [Google Scholar] [CrossRef] [PubMed]
- Stewart, M.; Webster, J.; Schaefer, A.; Cook, N.; Scott, S. Infrared thermography as a non-invasive tool to study animal welfare. Anim. Welf. 2005, 14, 319–325. [Google Scholar]
- Taylor, N.A.; Tipton, M.J.; Kenny, G.P. Considerations for the measurement of core, skin and mean body temperatures. J. Therm. Biol. 2014, 46, 72–101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Godyń, D.; Herbut, P.; Angrecka, S. Measurements of peripheral and deep body temperature in cattle—A review. J. Therm. Biol. 2019, 79, 42–49. [Google Scholar] [CrossRef]
- Jiao, L.; Dong, D.; Zhao, X.; Han, P. Compensation method for the influence of angle of view on animal temperature measurement using thermal imaging camera combined with depth image. J. Therm. Biol. 2016, 62, 15–19. [Google Scholar] [CrossRef]
- Balakrishnan, G.; Durand, F.; Guttag, J. Detecting pulse from head motions in video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 23–28 June 2013; pp. 3430–3437. [Google Scholar]
- Cheng, J.; Chen, X.; Xu, L.; Wang, Z.J. Illumination variation-resistant video-based heart rate measurement using joint blind source separation and ensemble empirical mode decomposition. IEEE J. Biomed. Health 2017, 21, 1422–1433. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracked Feature | Number of Frames Analysed | Number of Frames Correctly Tracked | Accuracy (%) |
|---|---|---|---|
| Eyes | 134,966 | 124,207 | 92.0 |
| Forehead | 134,966 | 124,526 | 92.3 |
| Face | 125,715 | 118,813 | 94.5 |
| Invasive Method | Computer-Vision Method | Mean Correlation Coefficient (r) * | Range (r) | p-Value ** | |||
|---|---|---|---|---|---|---|---|
| Camera | Position | Distance | Analysed Area | ||||
| Thermochron | FLIR AX8 | Front | 1.5 m | Eye area | 0.77 ± 0.12 | 0.64–0.93 | <0.01 |
| Thermochron | FLIR AX8 | Side | 0.5 m | Eye area | 0.8 ± 0.06 | 0.74–0.89 | <0.01 |
| Thermochron | FLIR AX8 | Side | 0.5 m | Ear base | 0.54 ± 0.15 | 0.33–0.70 | <0.05 |
| Invasive Method | Computer-Vision Method | Mean Correlation Coefficient (r)* | Range (r) | p-Value** | |||
|---|---|---|---|---|---|---|---|
| Camera | Position | Distance | Analysed Area | ||||
| Thermochron | FLIR AX8 | Front | 1.5 m | Eye area | 0.64 ± 0.18 | 0.42–0.83 | <0.05 |
| Thermochron | FLIR AX8 | Side | 0.5 m | Eye area | 0.68 ± 0.17 | 0.47–0.86 | <0.05 |
| Thermochron | FLIR AX8 | Side | 0.5 m | Ear base | 0.43 ± 0.23 | 0.33–0.67 | <0.05 |
| Invasive Method | Computer-Vision Method | Mean Correlation Coefficient (r) * | Range (r) | p-Value ** | |||
|---|---|---|---|---|---|---|---|
| Camera | Position | Distance | Analysed Area | ||||
| Polar monitor | RaspberryPi | Front | 1.5 m | Eye area | 0.89 ± 0.09 | 0.72–0.99 | <0.05 |
| Polar monitor | RaspberryPi | Front | 1.5 m | Forehead | 0.62 ± 0.23 | 0.32–0.90 | <0.05 |
| Polar monitor | RaspberryPi | Front | 1.5 m | Face | 0.16 ± 0.2 | −0.11–0.39 | >0.05 |
| Polar monitor | RaspberryPi | Side | 0.5 m | Eye area | 0.78 ± 0.04 | 0.74–0.84 | <0.01 |
| Polar monitor | RaspberryPi | Side | 0.5 m | Forehead | 0.71 ± 0.18 | 0.53–0.89 | <0.05 |
| Polar monitor | GoPro | Side | 0.5 m | Eye area | 0.75 ± 0.14 | 0.55–0.92 | <0.05 |
| Polar monitor | GoPro | Front | 0.5 m | Forehead | 0.65 ± 0.08 | 0.58–0.76 | <0.05 |
| Invasive method | Computer-Vision Method | Mean Correlation Coefficient (r) * | Range (r) | p-Value ** | |||
|---|---|---|---|---|---|---|---|
| Camera | Position | Distance | Analysed Area | ||||
| Polar monitor | RaspberryPi | Front | 1.5 m | Eye area | 0.83 ± 0.15 | 0.55–0.99 | <0.05 |
| Polar monitor | RaspberryPi | Front | 1.5 m | Forehead | 0.78 ± 0.19 | 0.41–0.99 | <0.05 |
| Polar monitor | RaspberryPi | Front | 1.5 m | Face | 0.2 ± 0.23 | −0.1–0.4 | >0.05 |
| Polar monitor | RaspberryPi | Side | 0.5 m | Eye area | 0.75 ± 0.19 | 0.46–0.96 | <0.01 |
| Polar monitor | RaspberryPi | Side | 0.5 m | Forehead | 0.77 ± 0.20 | 0.39–0.98 | <0.05 |
| Polar monitor | GoPro | Side | 0.5 m | Eye area | 0.77 ± 0.11 | 0.61–0.87 | <0.01 |
| Polar monitor | GoPro | Front | 0.5 m | Forehead | 0.79 ± 0.18 | 0.50–0.99 | <0.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jorquera-Chavez, M.; Fuentes, S.; Dunshea, F.R.; Warner, R.D.; Poblete, T.; Jongman, E.C. Modelling and Validation of Computer Vision Techniques to Assess Heart Rate, Eye Temperature, Ear-Base Temperature and Respiration Rate in Cattle. Animals 2019, 9, 1089. https://doi.org/10.3390/ani9121089
Jorquera-Chavez M, Fuentes S, Dunshea FR, Warner RD, Poblete T, Jongman EC. Modelling and Validation of Computer Vision Techniques to Assess Heart Rate, Eye Temperature, Ear-Base Temperature and Respiration Rate in Cattle. Animals. 2019; 9(12):1089. https://doi.org/10.3390/ani9121089
Chicago/Turabian StyleJorquera-Chavez, Maria, Sigfredo Fuentes, Frank R. Dunshea, Robyn D. Warner, Tomas Poblete, and Ellen C. Jongman. 2019. "Modelling and Validation of Computer Vision Techniques to Assess Heart Rate, Eye Temperature, Ear-Base Temperature and Respiration Rate in Cattle" Animals 9, no. 12: 1089. https://doi.org/10.3390/ani9121089
APA StyleJorquera-Chavez, M., Fuentes, S., Dunshea, F. R., Warner, R. D., Poblete, T., & Jongman, E. C. (2019). Modelling and Validation of Computer Vision Techniques to Assess Heart Rate, Eye Temperature, Ear-Base Temperature and Respiration Rate in Cattle. Animals, 9(12), 1089. https://doi.org/10.3390/ani9121089