Review of Sensor Technologies in Animal Breeding: Phenotyping Behaviors of Laying Hens to Select Against Feather Pecking

 , , ,
, , ,  , , , and
, , , and
Abstract
:Simple Summary
Abstract
1. Introduction
2. Understanding Feather Pecking Through “-Omics” Approaches
2.1. Genomics Approach
2.2. Other “-Omics” Approaches
3. Sensor Technologies
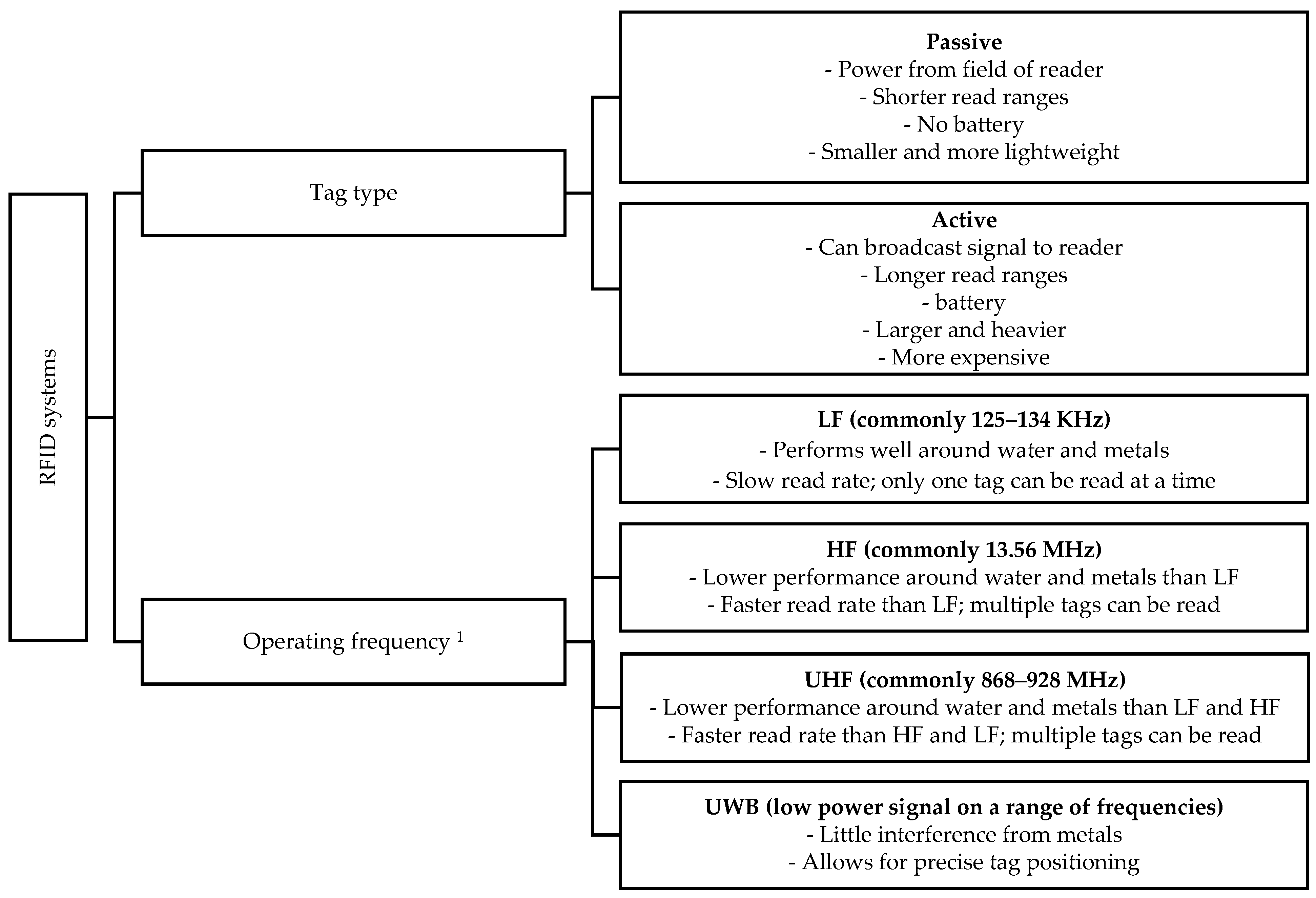
3.1. Radio Frequency Identification (RFID)
3.1.1. General Introduction to RFID
3.1.2. Passive RFID
3.1.3. Active RFID Systems (Ultra-Wideband)
3.1.4. Application of RFID to FP
3.2. Computer Vision
3.2.1. General Introduction to The Computer Vision Approach and Its Key-Aspects
- Scene-based: works better in controlled environments with uniform illumination and scene parameters that could be easily altered;
- Shape-based: utilizes geometrical characteristics of the object-to-find for example lines, points, edges and is usually applied as the number of filters scanning the image in a sliding-window manner. Heavily relies on image acquisition method, image quality, and number of objects to detect;
- Motion-based: uses the temporal difference between corresponding frames to find changes in pixel velocity, creating “shadow maps” with object’s positions or activity indices; mostly used for area supervision;
- Appearance-based: utilizes such image properties as the number of channels, color intensity, hue, to detect the desired object. Heavily relies on image acquisition method and number of objects to detect.
3.2.2. Overview of Recent Developments in CV Related to Monitoring Larger Groups of Individuals
- The Field of View (FOV) of the Kinect V1 camera is relatively small (for example, 1.5 × 1.5 m at 2-m height). For large rooms and areal scanning, the camera would need to be moved around at a pre-defined speed to capture the full area of interest, which could affect both scene reconstruction from depth data as well as object detection. An alternative would be to have several cameras with overlapping FOV. However, linking the cameras together is still a challenge;
- Computational costs (due to image size and algorithm complexity) and limits to cable extension (as the camera requires a stable bandwidth for data flow) could be a problem if used on farm;
- The features defining welfare/health-related issues should be consistent across variable environments (e.g., different lightning conditions, levels of dust) and be of a type that allow fast processing in scenes with high stocking density.
4. Use of Sensor Technologies in Different Applications
5. Identification of Indicator Traits from Sensor and “-Omics” Technologies
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Savory, C.J. Feather pecking and cannibalism. World Poult. Sci. J. 1995, 51, 215–219. [Google Scholar] [CrossRef]
- Blokhuis, H.J.; Wiepkema, P.R. Studies of feather pecking in poultry. Vet. Q. 1998, 20, 6–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodenburg, T.B.; Van Krimpen, M.M.; De Jong, I.C.; De Haas, E.N.; Kops, M.S.; Riedstra, B.J.; Nordquist, R.E.; Wagenaar, J.P.; Bestman, M.; Nicol, C.J. The prevention and control of feather pecking in laying hens: Identifying the underlying principles. World Poult. Sci. J. 2013, 69, 361–374. [Google Scholar] [CrossRef]
- Kjaer, J.B.; Sorensen, P.; Su, G. Divergent selection on feather pecking behaviour in laying hens (gallus gallus domesticus). Appl. Anim. Behav. Sci. 2001, 71, 229–239. [Google Scholar] [CrossRef]
- Muir, W.M. Group selection for adaptation to multiple-hen cages: Selection program and direct responses. Poult. Sci. 1996, 75, 447–458. [Google Scholar] [CrossRef] [PubMed]
- Bijma, P.; Muir, W.M.; van Arendonk, J.A.M. Multilevel selection 1: Quantitative genetics of inheritance and response to selection. Genetics 2007, 175, 277–288. [Google Scholar] [CrossRef] [PubMed]
- Griffing, B. Selection in reference to biological groups І. Individual and group selection applied to populations of unordered groups. Aust. J. Biol. Sci. 1967, 20, 127–139. [Google Scholar] [CrossRef]
- Muir, W.M. Incorporation of competitive effects in forest tree or animal breeding programs. Genetics 2005, 170, 1247–1259. [Google Scholar] [CrossRef]
- Brinker, T.; Bijma, P.; Visscher, J.; Rodenburg, T.B.; Ellen, E.D. Plumage condition in laying hens: Genetic parameters for direct and indirect effects in two purebred layer lines. Genet. Sel. Evol. 2014, 46, 33. [Google Scholar] [CrossRef]
- Ellen, E.D.; Rodenburg, T.B.; Albers, G.A.A.; Bolhuis, J.E.; Camerlink, I.; Duijvesteijn, N.; Knol, E.F.; Muir, W.M.; Peeters, K.; Reimert, I.; et al. The prospects of selection for social genetic effects to improve welfare and productivity in livestock. Front. Genet. 2014, 5, 377. [Google Scholar] [CrossRef] [PubMed]
- Hughes, B.O.; Duncan, I.J.H. The influence of strain and environmental factors upon feather pecking and cannibalism in fowls. Br. Poult. Sci. 1972, 13, 525–547. [Google Scholar] [CrossRef] [PubMed]
- Rodenburg, T.B.; Buitenhuis, A.J.; Ask, B.; Uitdehaag, K.A.; Koene, P.; van der Poel, J.J.; van Arendonk, J.A.M.; Bovenhuis, H. Genetic and phenotypic correlations between feather pecking and open-field response in laying hens at two different ages. Behav. Genet. 2004, 34, 407–415. [Google Scholar] [CrossRef] [PubMed]
- Jones, R.B.; Blokhuis, H.J.; Beuving, G. Open-field and tonic immobility responses in domestic chicks of two genetic lines differing in their propensity to feather peck. Br. Poult. Sci. 1995, 36, 525–530. [Google Scholar] [CrossRef]
- Kjaer, J.B. Feather pecking in domestic fowl is genetically related to locomotor activity levels: Implications for a hyperactivity disorder model of feather pecking. Behav. Genet. 2009, 39, 564–570. [Google Scholar] [CrossRef] [PubMed]
- Rodenburg, T.B.; Naguib, M. Tracking individual laying hens in group housing. In Proceedings of the Measuring Behavior, Wageningen, The Netherlands, 27–29 August 2014. [Google Scholar]
- Lee, H.-J.; Roberts, S.J.; Drake, K.A.; Dawkins, M.S. Prediction of feather damage in laying hens using optical flows and markov models. J. R. Soc. Interface 2010, 8, 489–499. [Google Scholar] [CrossRef] [PubMed]
- Quwaider, M.; Daigle, C.; Biswas, S.; Siegford, J.; Swanson, J. Development of a wireless body-mounted sensor to monitor location and activity of laying hens in a non-cage housing system. Trans. ASABE 2010, 53, 1705–1713. [Google Scholar] [CrossRef]
- Mench, J.A.; Blatchford, R.A. Determination of space use by laying hens using kinematic analysis. Poult. Sci. 2014, 93, 794–798. [Google Scholar] [CrossRef] [PubMed]
- Daigle, C.L.; Banerjee, D.; Biswas, S.; Siegford, J.M. Noncaged laying hens remain unflappable while wearing body-mounted sensors: Levels of agonistic behaviors remain unchanged and resource use is not reduced after habituation. Poult. Sci. 2012, 91, 2415–2423. [Google Scholar] [CrossRef] [Green Version]
- Richards, G.J.; Wilkins, L.J.; Knowles, T.G.; Booth, F.; Toscano, M.J.; Nicol, C.J.; Brown, S.N. Continuous monitoring of pop hole usage by commercially housed free-range hens throughout the production cycle. Vet. Rec. 2011, 169, 338. [Google Scholar] [CrossRef]
- Siegford, J.M.; Berezowski, J.; Biswas, S.K.; Daigle, C.L.; Gebhardt-Henrich, S.G.; Hernandez, C.E.; Thurner, S.; Toscano, M.J. Assessing activity and location of individual laying hens in large groups using modern technology. Animals 2016, 6, 10. [Google Scholar] [CrossRef]
- Banerjee, D.; Daigle, C.L.; Dong, B.; Wurtz, K.; Newberry, R.C.; Siegford, J.M.; Biswas, S. Detection of jumping and landing force in laying hens using wireless wearable sensors. Poult. Sci. 2014, 93, 2724–2733. [Google Scholar] [CrossRef] [Green Version]
- Nakarmi, A.D.; Tang, L.; Xin, H. Automated tracking and behavior quantification of laying hens using 3d computer vision and radio frequancy identification technologies. Trans. ASABE 2014, 57, 1455–1472. [Google Scholar] [CrossRef]
- Zaninelli, M.; Redaelli, V.; Tirloni, E.; Bernardi, C.; Dell’Orto, V.; Savoini, G. First results of a detection sensor for the monitoring of laying hens reared in a commercial organic egg production farm based on the use of infrared technology. Sensors 2016, 16, 13. [Google Scholar] [CrossRef]
- Rodenburg, T.B.; Bennewitz, J.; De Haas, E.N.; Kost’ál, L.; Pichová, K.; Piette, D.; Tetens, J.; van der Eijk, J.; Visser, B.; Ellen, E.D. The use of sensor technology and genomics to breed for laying hens that show less damaging behaviour. In Proceedings of the 8th European Conference on Precision Livestock Farming, Nantes, France, 12–14 September 2017. [Google Scholar]
- Buitenhuis, A.J.; Rodenburg, T.B.; Siwek, M.; Cornelissen, S.J.; Nieuwland, M.G.; Crooijmans, R.P.; Groenen, M.A.; Koene, P.; Bovenhuis, H.; Poel, J.J.V.D. Identification of quantitative trait loci for receiving pecks in young and adult laying hens. Poult. Sci. 2003, 82, 1661–1667. [Google Scholar] [CrossRef] [Green Version]
- Jensen, P.; Keeling, L.; Schütz, K.; Andersson, L.; Morméde, P.; Brändström, H.; Forkman, B.; Kerje, S.; Fredriksson, R.; Ohlsson, C.; et al. Feather pecking in chickens is genetically related to behavioural and developmental traits. Physiol. Behav. 2005, 86, 52–60. [Google Scholar] [CrossRef]
- Biscarini, F.; Bovenhuis, H.; Van der Poel, J.J.; Rodenburg, T.B.; Jungerius, A.P.; Van Arendonk, J.A.M. Across-line snp association study for direct and associative effects on feather damage in laying hens. Behav. Genet. 2010, 40, 715–727. [Google Scholar] [CrossRef]
- Grams, V.; Wellmann, R.; Preuss, S.; Grashorn, M.A.; Kjaer, J.B.; Bessei, W.; Bennewitz, J. Genetic parameters and signatures of selection in two divergent laying hen lines selected for feather pecking behaviour. Genet. Sel. Evol. 2015, 47, 77. [Google Scholar] [CrossRef]
- Lutz, V.; Stratz, P.; Preuss, S.; Tetens, J.; Grashorn, M.A.; Bessei, W.; Bennewitz, J. A genome-wide association study in a large f2-cross of laying hens reveals novel genomic regions associated with feather pecking and aggressive pecking behavior. Genet. Sel. Evol. 2017, 49, 18. [Google Scholar] [CrossRef]
- Brinker, T.; Bijma, P.; Vereijken, A.; Ellen, E.D. The genetic architecture of socially-affected traits: A gwas for direct and indirect genetic effects on survival time in laying hens showing cannibalism. Genet. Sel. Evol. 2018, 50, 38. [Google Scholar] [CrossRef]
- De Almeida, R.M.; Ferrari, P.F.; Parmigiani, S.; Miczek, K.A. Escalated aggressive behavior: Dopamine, serotonin and gaba. Eur. J. Pharmacol. 2005, 526, 51–64. [Google Scholar] [CrossRef]
- Takahashi, A.; Schilit, A.N.; Kim, J.; DeBold, J.F.; Koide, T.; Miczek, K.A. Behavioral characterization of escalated aggression induced by gaba b receptor activation in the dorsal raphe nucleus. Psychopharmacology 2012, 224, 155–166. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, A.; Shimamoto, A.; Boyson, C.O.; DeBold, J.F.; Miczek, K.A. Gabab receptor modulation of serotonin neurons in the dorsal raphe nucleus and escalation of aggression in mice. J. Neurosci. 2010, 30, 11771–11780. [Google Scholar] [CrossRef] [PubMed]
- Tetens, J.; Beier, J.; Falker-Gieske, C.; Preuß, S.; Bessei, W.; Bennewitz, J. Gene-based mapping and pathway analysis of father pecking in laying hens. In Proceedings of the XVth European Poultry Conference, Dubrovnik, Croatia, 17–21 September 2018; p. 92. [Google Scholar]
- Labouriau, R.; Kjaer, J.B.; Abreu, G.C.G.; Hedegaard, J.; Buitenhuis, A.J. Analysis of severe feather pecking behavior in a high feather pecking selection line. Poult. Sci. 2009, 88, 2052–2062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hughes, A.L.; Buitenhuis, A.J. Reduced variance of gene expression at numerous loci in a population of chickens selected for high feather pecking. Poult. Sci. 2010, 89, 1858–1869. [Google Scholar] [CrossRef] [Green Version]
- Brunberg, E.; Jensen, P.; Isaksson, A.; Keeling, L. Feather pecking behavior in laying hens: Hypothalamic gene expression in birds performing and receiving pecks. Poult. Sci. 2011, 90, 1145–1152. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blokhuis, H.J. Feather-pecking in poultry: Its relation with groundpecking. Appl. Anim. Behav. Sci. 1986, 16, 63–67. [Google Scholar] [CrossRef]
- Blokhuis, H.J.; Arkes, J.G. Some observations on the development of feather-pecking in poultry. Appl. Anim. Behav. Sci. 1984, 12, 145–157. [Google Scholar] [CrossRef]
- Huber-Eicher, B.; Wechsler, B. Feather pecking in domestic chicks: Its relation to dustbathing and foraging. Anim. Behav. 1997, 54, 757–768. [Google Scholar] [CrossRef]
- Wysocki, M.; Preuss, S.; Stratz, P.; Bennewitz, J. Investigating gene expression differences in two chicken groups with variable propensity to feather pecking. Anim. Genet. 2013, 44, 773–777. [Google Scholar] [CrossRef]
- Kops, M.S.; de Haas, E.N.; Rodenburg, T.B.; Ellen, E.D.; Korte-Bouws, G.A.; Olivier, B.; Güntürkün, O.; Bolhuis, J.E.; Korte, S.M. Effects of feather pecking phenotype (severe feather peckers, victims and non-peckers) on serotonergic and dopaminergic activity in four brain areas of laying hens (gallus gallus domesticus). Physiol. Behav. 2013, 120, 77–82. [Google Scholar] [CrossRef]
- Kops, M.S.; de Haas, E.N.; Rodenburg, T.B.; Ellen, E.D.; Korte-Bouws, G.A.H.; Olivier, B.; Güntürkün, O.; Korte, S.M.; Bolhuis, J.E. Selection for low mortality in laying hens affects catecholamine levels in the arcopallium, a brain area involved in fear and motor regulation. Behav. Brain Res. 2013, 257, 54–61. [Google Scholar] [CrossRef]
- Kops, M.S.; Kjaer, J.B.; Gunturkun, O.; Westphal, K.G.C.; Korte-Bouws, G.A.H.; Olivier, B.; Bolhuis, J.E.; Korte, S.M. Serotonin release in the caudal nidopallium of adult laying hens genetically selected for high and low feather pecking behavior: An in vivo microdialysis study. Behav. Brain Res. 2014, 268, 81–87. [Google Scholar] [CrossRef] [PubMed]
- Kops, M.S.; Kjaer, J.B.; Gunturkun, O.; Westphal, K.G.C.; Korte-Bouws, G.A.H.; Olivier, B.; Korte, S.M.; Bolhuis, J.E. Brain monoamine levels and behaviour of young and adult chickens genetically selected on feather pecking. Behav. Brain Res. 2017, 327, 11–20. [Google Scholar] [CrossRef] [PubMed]
- De Haas, E.N.; van der Eijk, J.A.J. Where in the serotonergic system does it go wrong? Unravelling the route by which the serotonergic system affects feather pecking in chickens. Neurosci. Biobehav. Rev. 2018, 95, 170–188. [Google Scholar] [CrossRef] [PubMed]
- Grams, V.; Bogelein, S.; Grashorn, M.A.; Bessei, W.; Bennewitz, J. Quantitative genetic analysis of traits related to fear and feather pecking in laying hens. Behav. Genet. 2015, 45, 228–235. [Google Scholar] [CrossRef] [PubMed]
- Rodenburg, T.B.; Buitenhuis, A.J.; Ask, B.; Uitdehaag, K.A.; Koene, P.; van der Poel, J.J.; Bovenhuis, H. Heritability of feather pecking and open-field response of laying hens at two different ages. Poult. Sci. 2003, 82, 861–867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bennewitz, J.; Bogelein, S.; Stratz, P.; Rodehutscord, M.; Piepho, H.P.; Kjaer, J.B.; Bessei, W. Genetic parameters for feather pecking and aggressive behavior in a large f2-cross of laying hens using generalized linear mixed models. Poult. Sci. 2014, 93, 810–817. [Google Scholar] [CrossRef] [PubMed]
- Roberts, C.M. Radio frequency identification (rfid). Comput. Secur. 2006, 25, 18–26. [Google Scholar] [CrossRef]
- Ruiz-Garcia, L.; Lunadei, L. The role of rfid in agriculture: Applications, limitations and challenges. Comput. Electron. Agric. 2011, 79, 42–50. [Google Scholar] [CrossRef]
- Debouzy, J.-C.; Perrin, A. RFID. In Electromagnetic Fields, Environment and Health; Perrin, A., Souques, M., Eds.; Springer: Paris, France, 2012; pp. 81–87. [Google Scholar]
- Finkenzeller, K. Rfid Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; John Wiley & Sons: Chichester, UK, 2010. [Google Scholar]
- Ngai, E.W.T.; Moon, K.K.L.; Riggins, F.J.; Yi, C.Y. Rfid research: An academic literature review (1995–2005) and future research directions. Int. J. Prod. Econ. 2008, 112, 510–520. [Google Scholar] [CrossRef]
- Brown-Brandl, T.M.; Maselyne, J.; Adrion, F.; Kapun, A.; Hessel, E.F.; Saeys, W.; Van Nuffel, A.; Gallmann, E. Comparing three different passive RFID systems for behaviour monitoring in grow-finish pigs. In Proceedings of the 8th European Conference on Precision Livestock Farming, Nantes, France, 12–14 September 2017; Berckmans, D., Keita, A., Eds.; pp. 622–631. [Google Scholar]
- Angeles, R. Rfid technologies: Supply-chain applications and implementation issues. Inform. Syst. Manag. 2005, 22, 51–65. [Google Scholar] [CrossRef]
- Nekoogar, F.; Dowla, F. Ultra-Wideband Radio Frequency Identification Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Campbell, D.L.M.; Hinch, G.N.; Dyall, T.R.; Warin, L.; Little, B.A.; Lee, C. Outdoor stocking density in free-range laying hens: Radio-frequency identification of impacts on range use. Animal 2017, 11, 121–130. [Google Scholar] [CrossRef] [PubMed]
- Gebhardt-Henrich, S.G.; Toscano, M.J.; Fröhlich, E.K.F. Use of outdoor ranges by laying hens in different sized flocks. Appl. Anim. Behav. Sci. 2014, 155, 74–81. [Google Scholar] [CrossRef] [Green Version]
- Hartcher, K.M.; Hickey, K.A.; Hemsworth, P.H.; Cronin, G.M.; Wilkinson, S.J.; Singh, M. Relationships between range access as monitored by radio frequency identification technology, fearfulness, and plumage damage in free-range laying hens. Animal 2016, 10, 847–853. [Google Scholar] [CrossRef] [PubMed]
- Kjaer, J.B. Divergent selection on home pen locomotor activity in a chicken model: Selection program, genetic parameters and direct response on activity and body weight. PLoS ONE 2017, 12, e0182103. [Google Scholar] [CrossRef]
- Chien, Y.-R.; Chen, Y.-X. An rfid-based smart nest box: An experimental study of laying performance and behavior of individual hens. Sensors 2018, 18, 859. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Zhao, Y.; Oliveira, J.; Verhoijsen, W.; Liu, K.; Xin, H. A uhf rfid system for studying individual feeding and nesting behaviors of hroup-housed laying hens. Trans. ASABE 2017, 60, 1337–1347. [Google Scholar] [CrossRef]
- Gebhardt-Henrich, S.G.; Fröhlich, E.K.F.; Burose, F.; Fleurent, J.; Gantner, M.; Zähner, M. Individual tracking of laying hens with an rfid-system. Landtechnik 2014, 69, 301–307. [Google Scholar]
- Thurner, S.; Wendl, G. Individual ranging behaviour of laying hens-automatic registration with rfid technology. Landtechnik 2005, 60, 30–31. [Google Scholar]
- Gebhardt-Henrich, S.G.; Fröhlich, E.K.F. Early onset of laying and bumblefoot favor keel bone fractures. Animals 2015, 5, 1192–1206. [Google Scholar] [CrossRef]
- Ringgenberg, N.; Fröhlich, E.K.F.; Harlander-Matauschek, A.; Toscano, M.J.; Würbel, H.; Roth, B.A. Effects of variation in nest curtain design on pre-laying behaviour of domestic hens. Appl. Anim. Behav. Sci. 2015, 170, 34–43. [Google Scholar] [CrossRef]
- Zaninelli, M.; Rossi, L.; Costa, A.; Tangorra, F.; Guarino, M.; Savoini, G. Performance of injected rfid transponders to collect data about laying performance and behaviour of hens. Large Anim. Rev. 2016, 22, 77–82. [Google Scholar]
- Sales, G.T.; Green, A.R.; Gates, R.S.; Brown-Brandl, T.M.; Eigenberg, R.A. Quantifying detection performance of a passive low-frequency rfid system in an environmental preference chamber for laying hens. Comput. Electron. Agric. 2015, 114, 261–268. [Google Scholar] [CrossRef]
- Thurner, S.; Pauli, S.; Wendl, G.; Preisinger, R. Using a wide electronic pop hole based on rfid-technology with high-frequency transponders to monitor the ranging behaviour of laying hens in alternative housing systems. In Proceedings of the 4th European Conference on Precision Livestock Farming, Wageningen, The Netherlands, 6–8 July 2009; pp. 243–249. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Porto, S.M.C.; Arcidiacono, C.; Giummarra, A.; Anguzza, U.; Cascone, G. Localisation and identification performances of a real-time location system based on ultra wide band technology for monitoring and tracking dairy cow behaviour in a semi-open free-stall barn. Comput. Electron. Agric. 2014, 108, 221–229. [Google Scholar] [CrossRef]
- Svalastog, M.S. Indoor Positioning-Technologies, Services and Architectures. Master’s Thesis, University of Oslo, Oslo, Norway, 2007. [Google Scholar]
- Santhanam, M. Uwb Technology and Its Applications—A Survey. Master’s Thesis, Tekniska Jönköping Hogskolan, Jönköping, Sweden, 2012. [Google Scholar]
- Mok, E.; Xia, L.; Retscher, G.; Tian, H. A case study on the feasibility and performance of an uwb-aoa real time location system for resources management of civil construction projects. J. Appl. Geod. 2010, 4, 23. [Google Scholar] [CrossRef]
- Linde, H. On Aspects of Indoor Localization. Ph.D. Thesis, Universitat Dortmund, Dortmund, Germany, 2006. [Google Scholar]
- Pastell, M.; Frondelius, L.; Järvinen, M.; Backman, J. Filtering methods to improve the accuracy of indoor positioning data for dairy cows. Biosyst. Eng. 2018, 169, 22–31. [Google Scholar] [CrossRef]
- Pastell, M.; Frondelius, L. A hidden markov model to estimate the feeding time of dairy cows based on indoor positioning data. Comput. Electron. Agric. 2018, 152, 182–185. [Google Scholar] [CrossRef]
- Stadig, L.M.; Ampe, B.; Rodenburg, T.B.; Reubens, B.; Maselyne, J.; Zhuang, S.; Criel, J.; Tuyttens, F.A.M. An automated positioning system for monitoring chickens’ location: Accuracy and registration success in a free-range area. Appl. Anim. Behav. Sci. 2018, 201, 31–39. [Google Scholar] [CrossRef]
- Ballard, D.H.; Brown, C.M. Computer Vision, 1st ed.; Prentice Hall Professional Technical Reference: Englewood Cliffs, NJ, USA, 1982. [Google Scholar]
- Shapiro, L.G.; Stockman, G.C. Computer Vision; Prentice Hall Professional Technical Reference: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Ben Sassi, N.; Averós, X.; Estevez, I. Technology and poultry welfare. Animals 2016, 6, 62. [Google Scholar] [CrossRef]
- Aydin, A. Using 3d vision camera system to automatically assess the level of inactivity in broiler chickens. Comput. Electron. Agric. 2017, 135, 4–10. [Google Scholar] [CrossRef]
- Wang, C.; Chen, H.; Zhang, X.; Meng, C. Evaluation of a laying-hen tracking algorithm based on a hybrid support vector machine. J. Anim. Sci. Biotechnol. 2016, 7, 60. [Google Scholar] [CrossRef]
- Zhuang, X.; Bi, M.; Guo, J.; Wu, S.; Zhang, T. Development of an early warning algorithm to detect sick broilers. Comput. Electron. Agric. 2018, 144, 102–113. [Google Scholar] [CrossRef]
- Sterling, T.; Anderson, M.; Brodowicz, M. High Performance Computing: Modern Systems and Practices; Morgan Kaufmann: Cambridge, MA USA, 2017. [Google Scholar]
- Mortensen, A.K.; Lisouski, P.; Ahrendt, P. Weight prediction of broiler chickens using 3d computer vision. Comput. Electron. Agric. 2016, 123, 319–326. [Google Scholar] [CrossRef]
- Dawkins, M.S.; Cain, R.; Merelie, K.; Roberts, S.J. In search of the behavioural correlates of optical flow patterns in the automated assessment of broiler chicken welfare. Appl. Anim. Behav. Sci. 2013, 145, 44–50. [Google Scholar] [CrossRef]
- Zaninelli, M.; Redaelli, V.; Luzi, F.; Bontempo, V.; Dell’Orto, V.; Savoini, G. A monitoring system for laying hens that uses a detection sensor based on infrared technology and image pattern recognition. Sensors 2017, 17, 1195. [Google Scholar] [CrossRef]
- Zaninelli, M.; Redaelli, V.; Luzi, F.; Mitchell, M.; Bontempo, V.; Cattaneo, D.; Dell’Orto, V.; Savoini, G. Development of a machine vision method for the monitoring of laying hens and detection of multiple nest occupations. Sensors 2018, 18, 132. [Google Scholar] [CrossRef]
- Rufener, C.; Berezowski, J.; Maximiano Sousa, F.; Abreu, Y.; Asher, L.; Toscano, M.J. Finding hens in a haystack: Consistency of movement patters within and across individual laying hens maintained in large groups. Sci. Rep. 2018, 8, 12303. [Google Scholar] [CrossRef]
- Rufener, C.; Abreu, Y.; Asher, L.; Berezowski, J.; Miguel Maximiano Sousa, F.; Stratmann, A.; Toscano, M.J. Keel bone fractures alter the mobility of individual laying hens in aviary systems. Appl. Animal Behav. Sci. 2019. submitted. [Google Scholar]
- Stadig, L.; Ampe, B.; Criel, J.; Maselyne, J.; Rodenburg, B.; Reubens, B.; Tuyttens, F. Monitoring individual chickens’ positions in a free-range area using ultra-wideband technology. In Proceedings of the Xth European Symposium on Poultry Welfare, Ploufragan, France, 19–22 June 2017; p. 102. [Google Scholar]
- Wang, K.; Liu, K.; Xin, H.; Chai, L.; Wang, Y.; Fei, T.; Oliveira, J.; Pan, J.; Ying, Y. A rfid-based monitoring system for characterization of perching behaviors of individual poultry. In Proceedings of the 10th International Livestock Environment Symposium (ILES X), Omaha, NE, USA, 25–27 September 2018. [Google Scholar]
- Li, G.; Zhao, Y.; Hailey, R.; Zhang, N.; Liang, Y.; Purswell, J.L. Radio-frequency identification (rfid) system for monitoring specific behaviors of group housed broilers. In Proceedings of the 10th International Livestock Environment Symposium (ILES X), Omaha, NE, USA, 25–27 September 2018. [Google Scholar]
- Aydin, A.; Berckmans, D. Using sound technology to automatically detect the short-term feeding behaviours of broiler chickens. Comput. Electron. Agric. 2016, 121, 25–31. [Google Scholar] [CrossRef]
- Banerjee, D.; Biswas, S.; Daigle, C.; Siegford, J.M. Remote activity classification of hens using wireless body mounted sensors. In Proceedings of the Ninth International Conference on Wearable and Implantable Body Sensor Networks (BSN), London, UK, 9–12 May 2012; pp. 107–112. [Google Scholar]
- Ali, A.; Siegford, J. An approach for tracking directional activity of individual laying hens within a multi-tier cage-free housing system (aviary) using accelerometers. Meas. Behav. 2018, 11, 176–180. [Google Scholar]
- Hashem, I.A.T.; Yaqoob, I.; Anuar, N.B.; Mokhtar, S.; Gani, A.; Ullah Khan, S. The rise of “big data” on cloud computing: Review and open research issues. Inf. Syst. 2015, 47, 98–115. [Google Scholar] [CrossRef]
- Verdouw, C.N.; Beulens, A.J.M.; Reijers, H.A.; van der Vorst, J.G.A.J. A control model for object virtualization in supply chain management. Comput. Ind. 2015, 68, 116–131. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
| Type of Camera | Camera Subtype | Factors to Consider during the Recording | Factors Potentially Affecting Data Quality |
|---|---|---|---|
| Infrared (IR) | Operating range (affects the sensitivity of measurement) Near-IR; Short wave (SWIR); Medium wave (MWIR); Long wave (LWIR); | Environmental factors (e.g., temperature, humidity, dust particles), angle and distance of measurement, reflective properties of the measured object (e.g., dry or wet feathers) | |
| 2D | Network/IP cameras Cheap, used for surveillance, often robust and have protected casing, compress images, great range of in-built functions, embedded hardware is capable of some processing, remote access for multiple users; | Sensor type CMOS: Less expensive, high dynamic range (HDR), no blooming, making it perfect for varying objects and scenes with varying illumination, low power consumption; CCD: More expensive, can capture more light, lower noise factor, higher fill and color reliability, making it perfect for less dynamic tasks and low-light conditions; Type of image Monochrome: Higher sensitivity and detail level, more difficult to process and analyze if the scene illumination varies; Color: RGB channels, possible to enhance based on pixel values, good for scenes with varying conditions; Frames Rate (FPS) capacity High Frame Rate = more images captured per second = faster sensor = higher data volume; Trade-off between desired complexity of behavior/parameter and image size; Resolution Resolution = (Object Size/Detail size)² | Camera calibration and scene reconstruction Scene Illumination Number of animals and background clutter Lens properties Occlusion Scale Object “deformation” |
| Industrial/Computer vision (CV) cameras Area Scan: Allows in-depth scene inspection as the image is recorded and processed “at once”; Line Scan: High-speed tasks, quality control, data are captured line-by-line and then reconstructed into the whole image; Expensive, images recorded in “raw” format and transferred to PC for processing, complex infrastructure for setup; | |||
| 3D | Stereo cameras Cheap, two or more lenses, depth range for recording depends on the distance between lenses, limited extensibility; | ||
| Continuous Wave Time of Flight (ToF) cameras Relatively cheap, emits continuous wave modulated light which returns back with depth data, usually lower sensor resolution, a wide range of functions (e.g., motion capture, scene reconstruction, object scanning); | |||
| Structured Light Cameras Cheapest, use an active stereovision approach (the known IR-pattern is projected onto the object of interest, and the depth data is calculated based on distortion occurring on the collision of IR-pattern and objects’ shape) | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ellen, E.D.; van der Sluis, M.; Siegford, J.; Guzhva, O.; Toscano, M.J.; Bennewitz, J.; van der Zande, L.E.; van der Eijk, J.A.J.; de Haas, E.N.; Norton, T.; et al. Review of Sensor Technologies in Animal Breeding: Phenotyping Behaviors of Laying Hens to Select Against Feather Pecking. Animals 2019, 9, 108. https://doi.org/10.3390/ani9030108
Ellen ED, van der Sluis M, Siegford J, Guzhva O, Toscano MJ, Bennewitz J, van der Zande LE, van der Eijk JAJ, de Haas EN, Norton T, et al. Review of Sensor Technologies in Animal Breeding: Phenotyping Behaviors of Laying Hens to Select Against Feather Pecking. Animals. 2019; 9(3):108. https://doi.org/10.3390/ani9030108
Chicago/Turabian StyleEllen, Esther D., Malou van der Sluis, Janice Siegford, Oleksiy Guzhva, Michael J. Toscano, Jörn Bennewitz, Lisette E. van der Zande, Jerine A. J. van der Eijk, Elske N. de Haas, Tomas Norton, and et al. 2019. "Review of Sensor Technologies in Animal Breeding: Phenotyping Behaviors of Laying Hens to Select Against Feather Pecking" Animals 9, no. 3: 108. https://doi.org/10.3390/ani9030108
APA StyleEllen, E. D., van der Sluis, M., Siegford, J., Guzhva, O., Toscano, M. J., Bennewitz, J., van der Zande, L. E., van der Eijk, J. A. J., de Haas, E. N., Norton, T., Piette, D., Tetens, J., de Klerk, B., Visser, B., & Rodenburg, T. B. (2019). Review of Sensor Technologies in Animal Breeding: Phenotyping Behaviors of Laying Hens to Select Against Feather Pecking. Animals, 9(3), 108. https://doi.org/10.3390/ani9030108