Application of an Inertia Dependent Flow Friction Model to Snow Avalanches: Exploration of the Model Using a Ping-Pong Ball Experiment



Abstract
:
1. Introduction
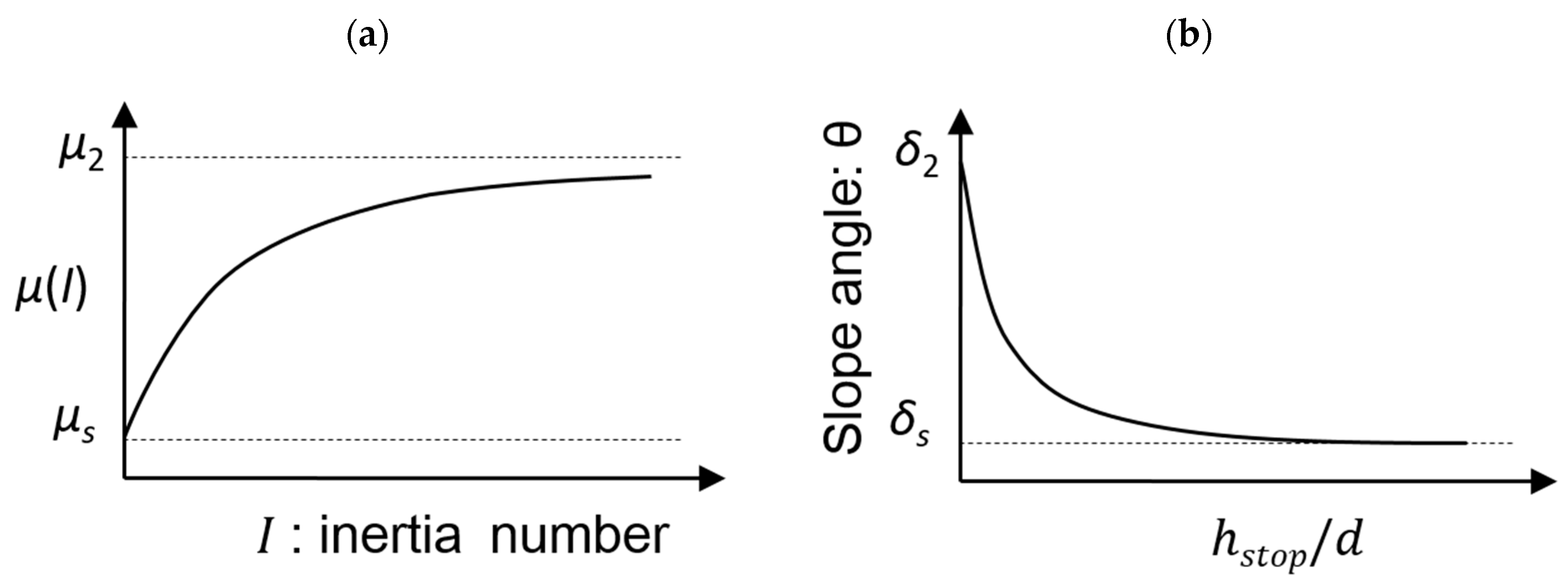
2. Model and Method
3. Results
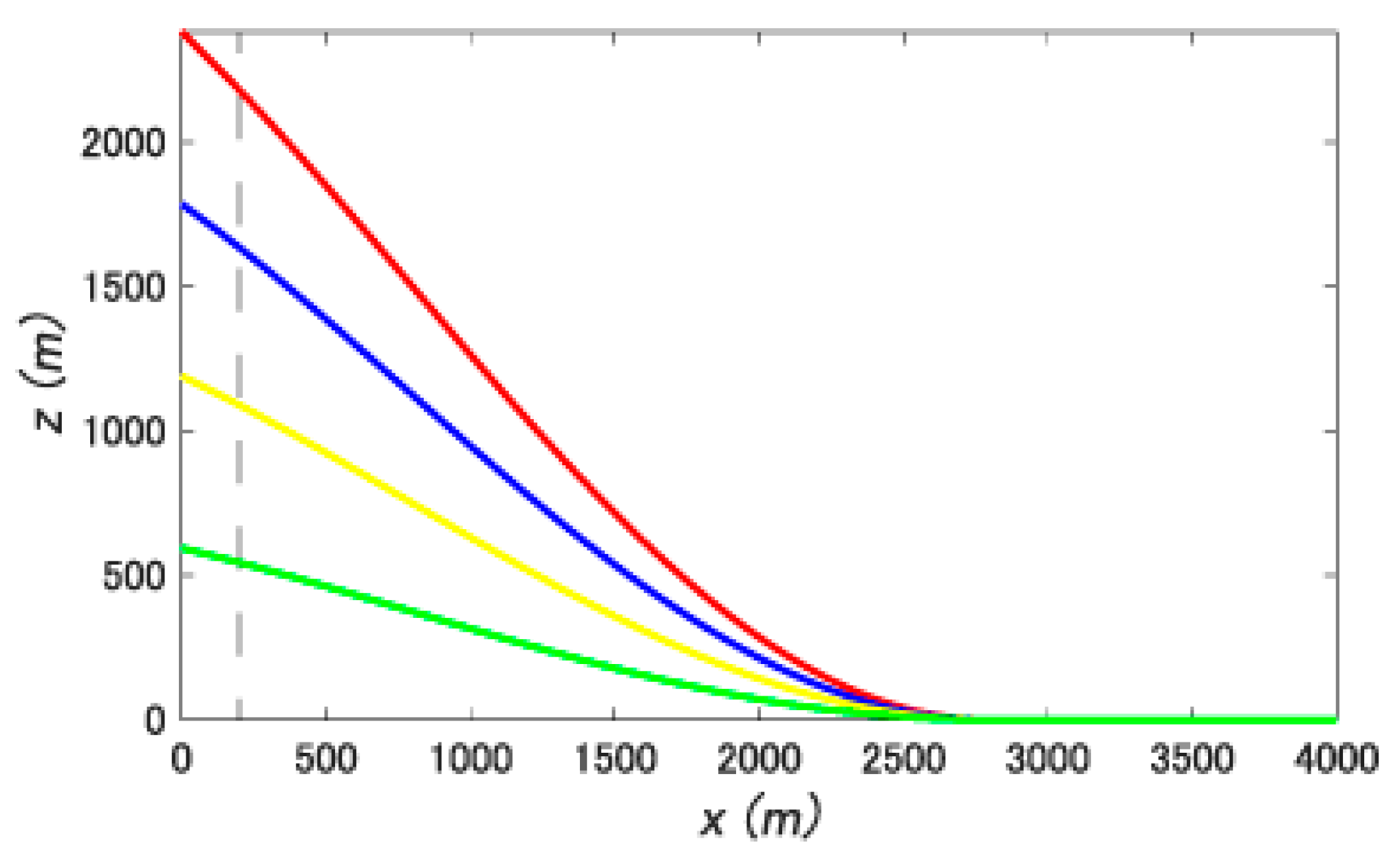
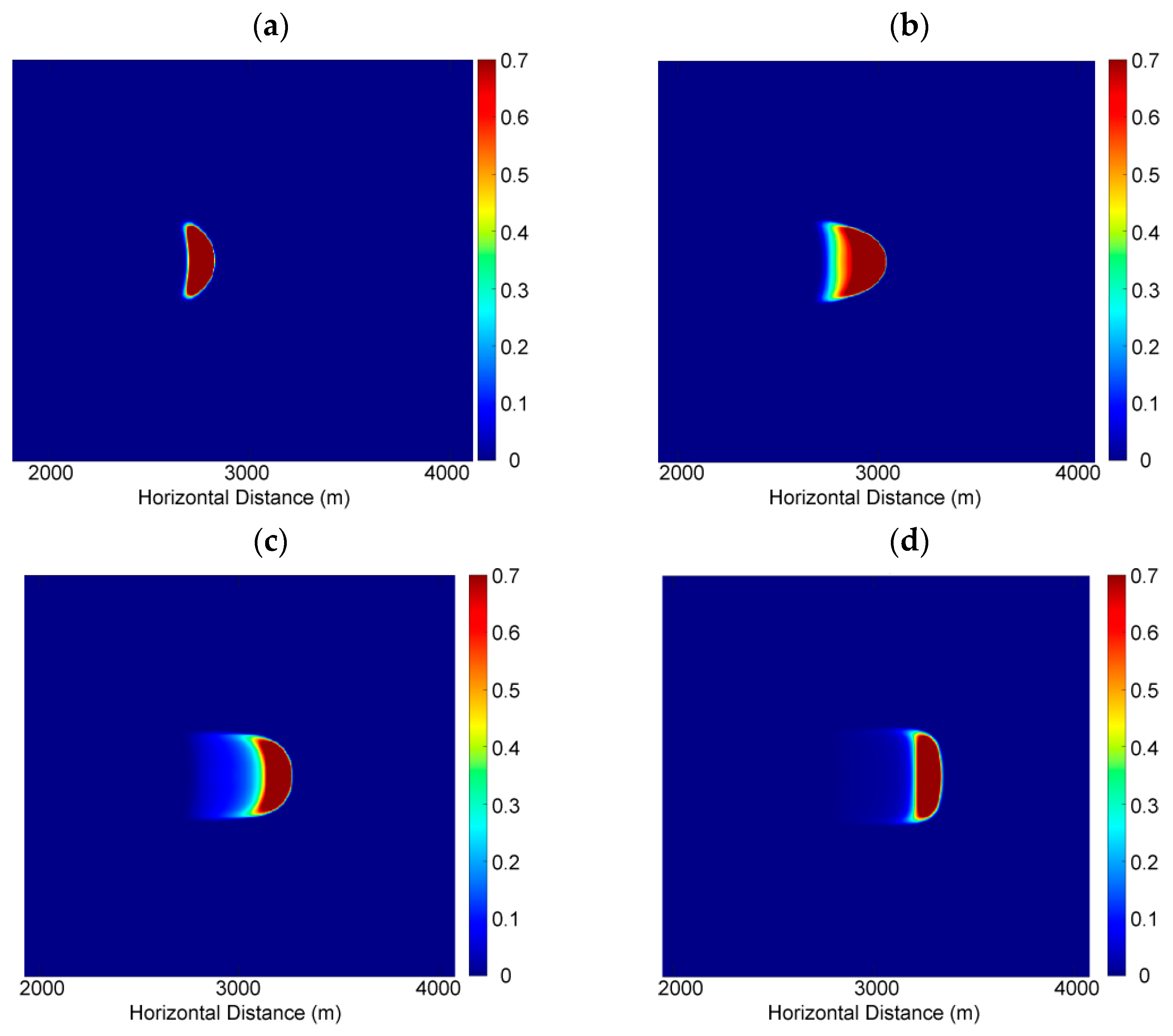
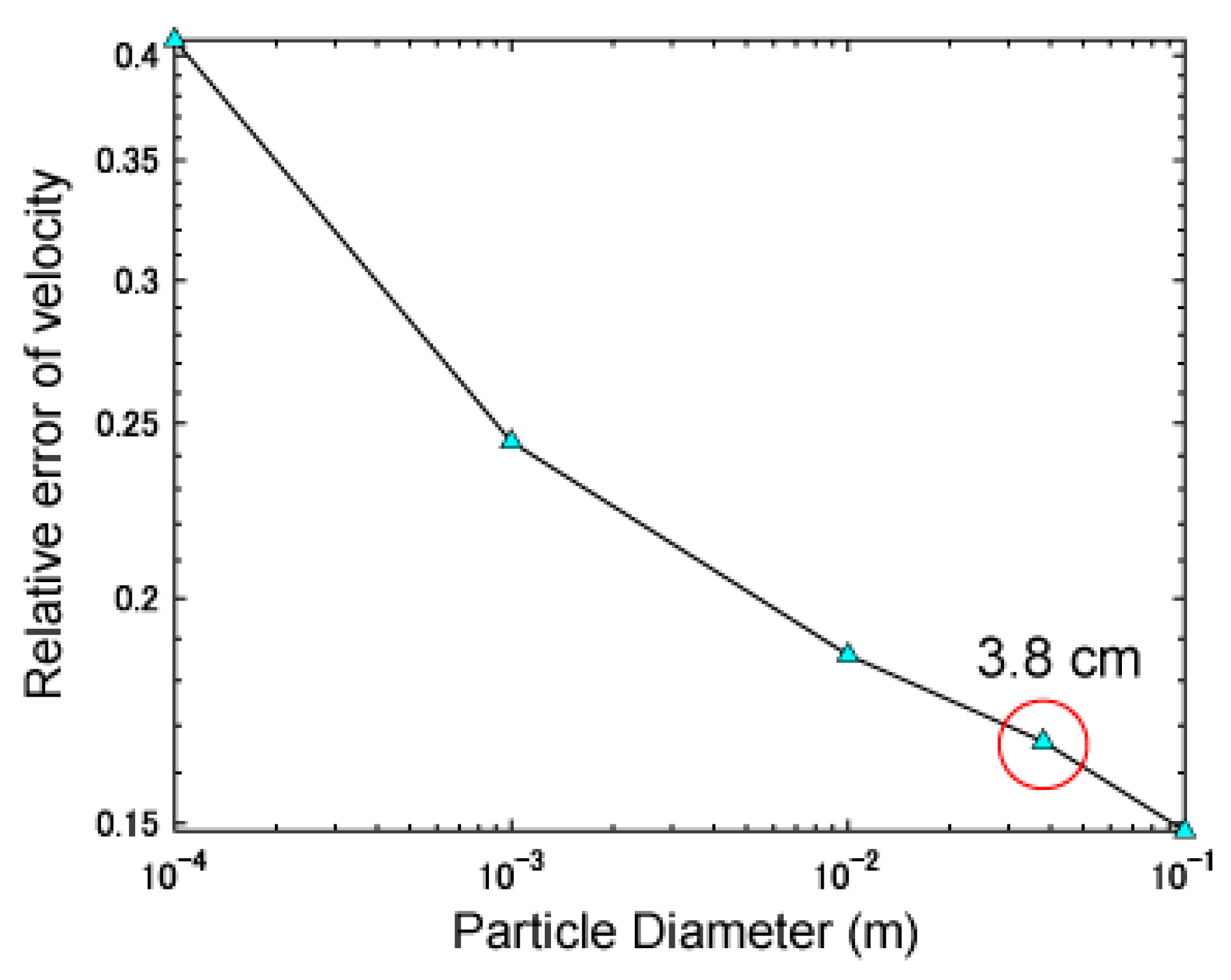
3.1. Particle Diameter and Flow Characteristics
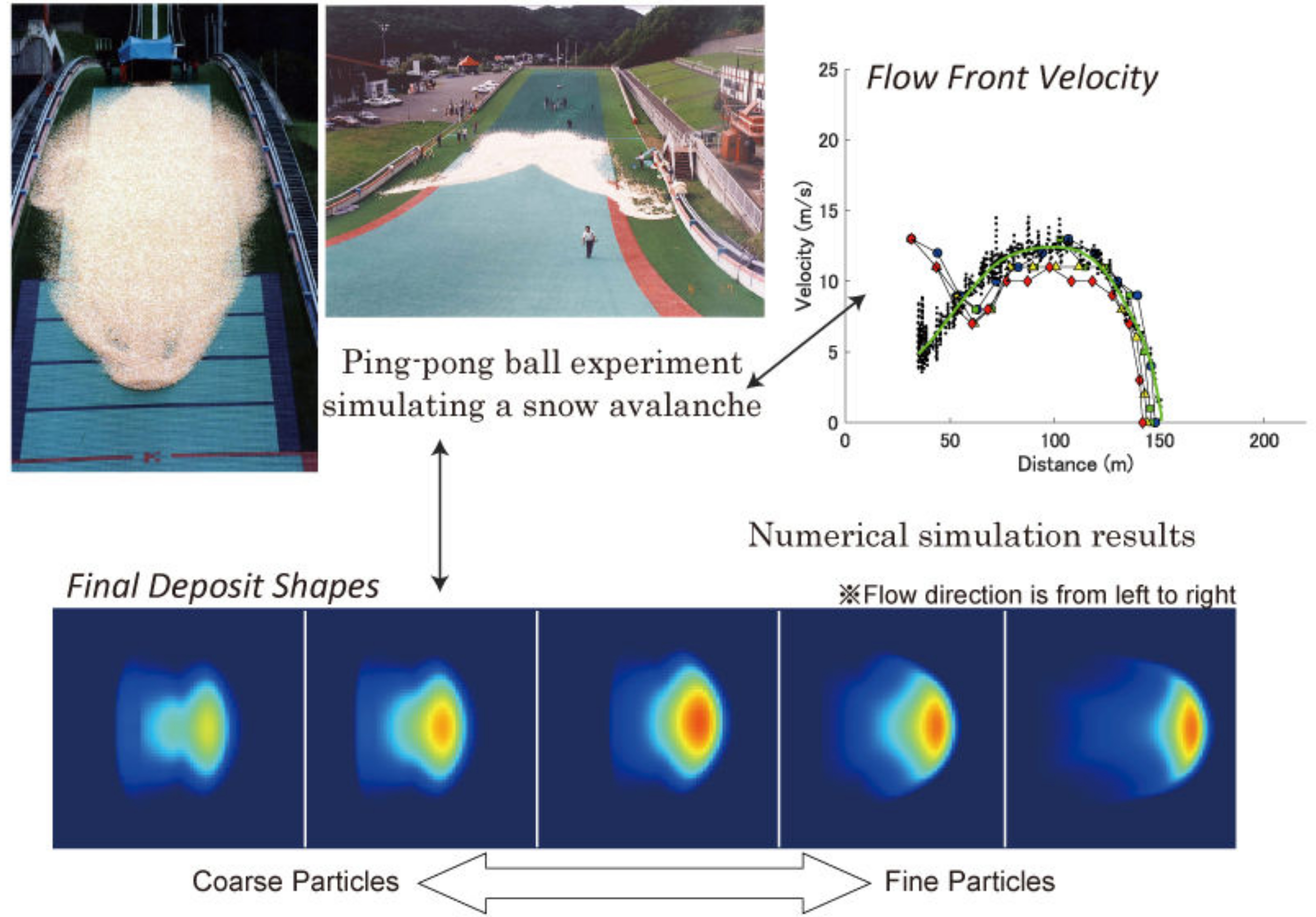
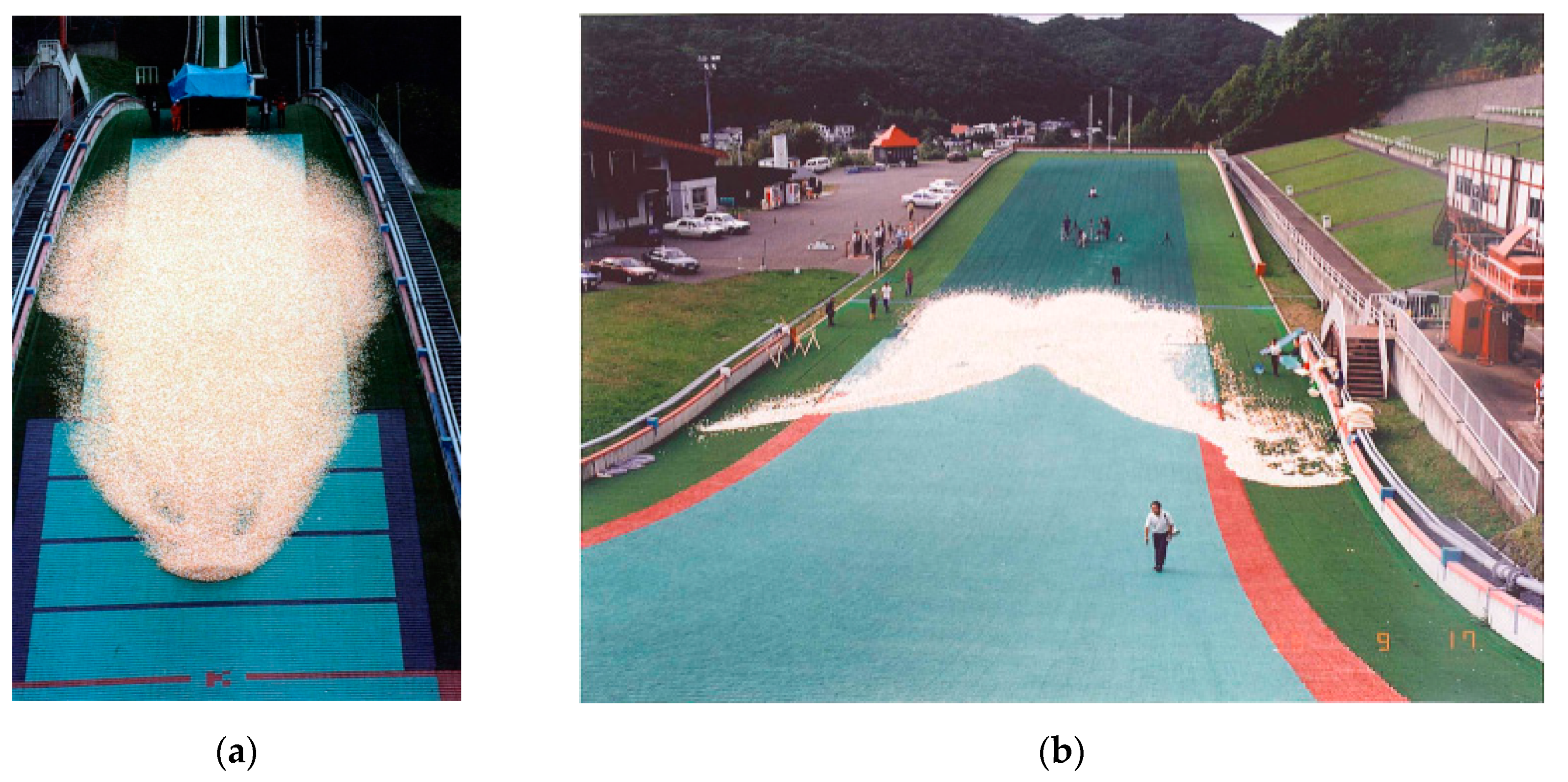
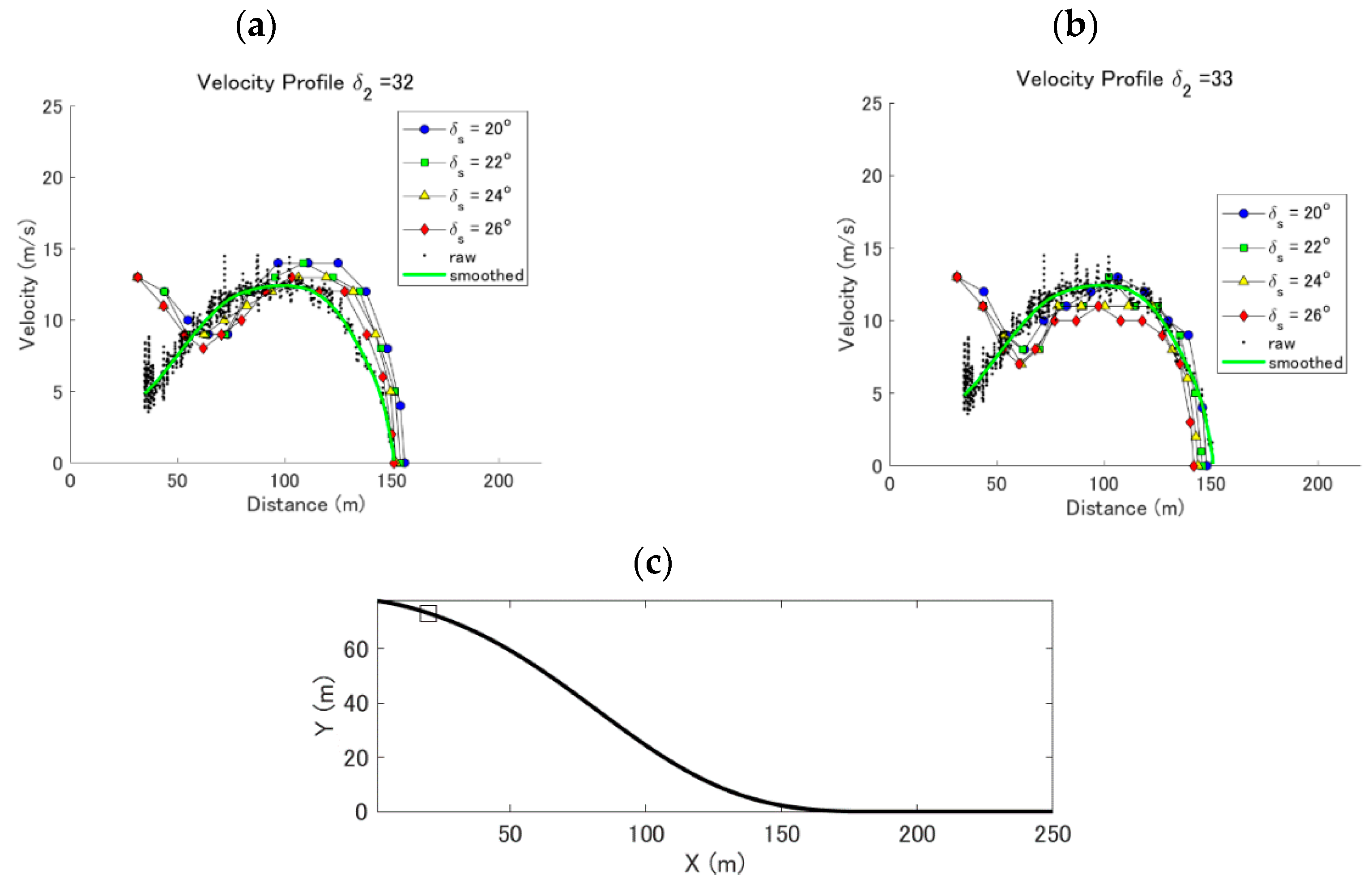
3.2. Comparison with the Ping-Pong Ball Experiment
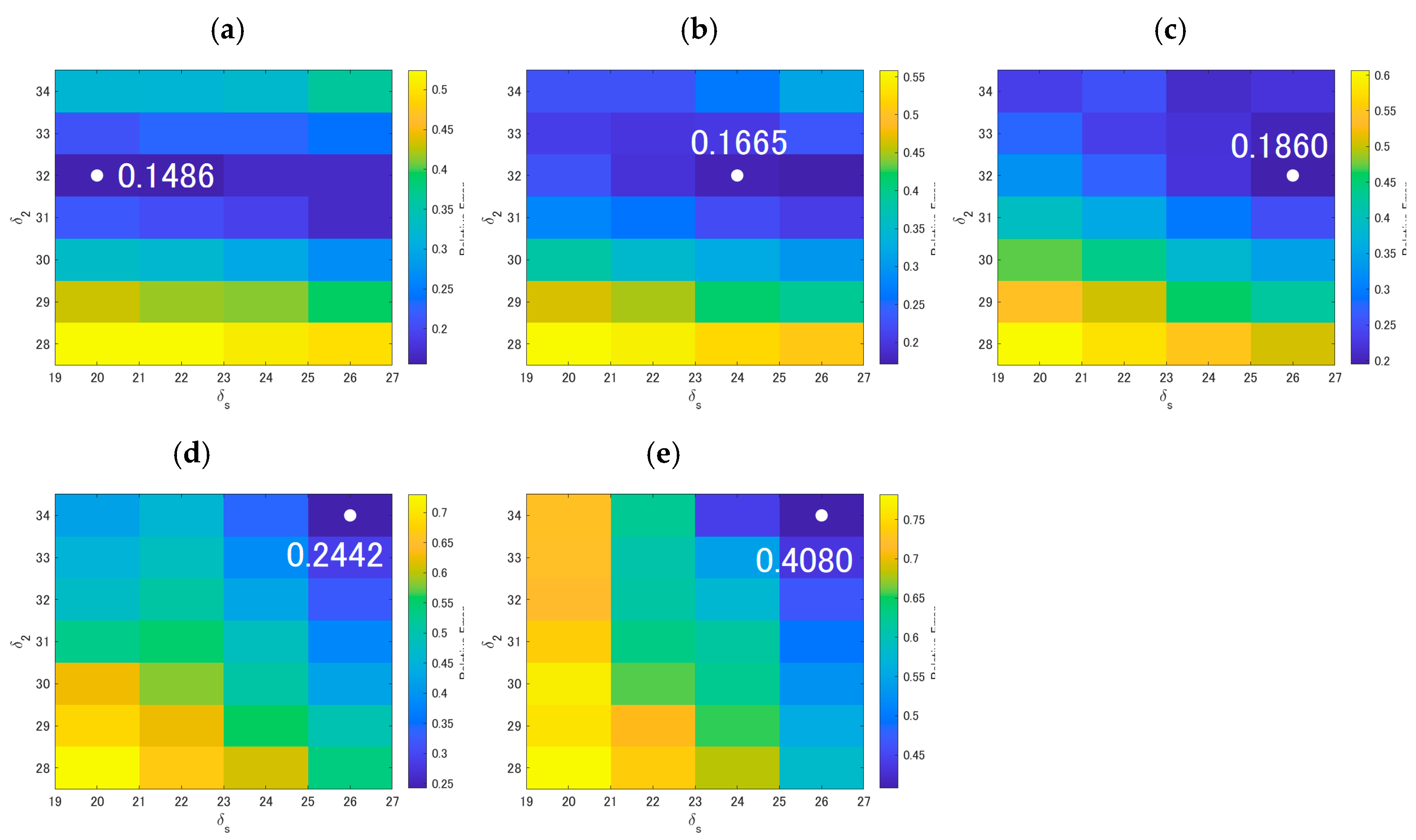
3.3. Error Analysis
4. Discussion
4.1. Shape Reproducibility
4.2. Velocity Reproducibility
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lied, K.; Bakkehøi, S. Empirical calculations of snow-avalanche run-out distance based on topographic parameters. J. Glaciol. 1980, 26, 165–177. [Google Scholar] [CrossRef] [Green Version]
- Sovilla, B.; Margreth, S.; Bartelt, P. On snow entrainment in avalanche dynamics calculations. Cold Reg. Sci. Technol. 2007, 47, 69–79. [Google Scholar] [CrossRef]
- Gauer, P.; Issler, D. Possible erosion mechanisms in snow avalanches. Ann. Glaciol. 2004, 38, 384–392. [Google Scholar] [CrossRef] [Green Version]
- Keller, S. Measurements of powder snow avalanches laboratory. Surv. Geophys. 1995, 16, 661–670. [Google Scholar] [CrossRef]
- Greve, R.; Hutter, K. Motion of a granular avalanche in a convex and concave curved chute: Experiments and theoretical predictions. Philos. Trans. R. Soc. Lond. Ser. A Phys. Eng. Sci. 1993, 342, 573–600. [Google Scholar]
- McElwaine, J.; Nishimura, K. Ping-pong ball avalanche experiments. Ann. Glaciol. 2001, 32, 241–250. [Google Scholar] [CrossRef] [Green Version]
- Nishimura, K.; Keller, S.; McElwaine, J.; Nohguchi, Y. Ping-pong ball avalanche at a ski jump. Granul. Matter 1998, 1, 51–56. [Google Scholar] [CrossRef]
- Ogura, T.; McElwaine, J.; Nishimura, K. Drag Forces and Ping-Pong Ball Avalanches. J. Jpn. Soc. Snow Ice 2003, 65, 117–125. [Google Scholar] [CrossRef]
- McClung, D.; Schaerer, P.A. The Avalanche Handbook; Mountaineers Books: Seattle, WA, USA, 2006; pp. 36, 88, 128. [Google Scholar]
- Christen, M.; Kowalski, J.; Bartelt, P. RAMMS: Numerical simulation of dense snow avalanches in three-dimensional terrain. Cold Reg. Sci. Technol. 2010, 63, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Voellmy, A. Über die Zerstörungskraft von Lawinen. Schweiz. Bauztg. 1955, 73, 15. [Google Scholar]
- Savage, S.; Hutter, K. The motion of a finite mass of granular material down a rough incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Savage, S.B.; Hutter, K. The dynamics of avalanches of granular materials from initiation to runout. Part I: Analysis. Acta Mech. 1991, 86, 201–223. [Google Scholar] [CrossRef]
- Patra, A.K.; Bauer, A.C.; Nichita, C.C.; Pitman, E.B.; Sheridan, M.F.; Bursik, M.; Rupp, B.; Webber, A.; Stinton, A.J.; Namikawa, L.M.; et al. Parallel adaptive numerical simulation of dry avalanches over natural terrain. J. Volcanol. Geoth. Res. 2005, 139, 1–21. [Google Scholar] [CrossRef]
- Sheridan, M.F.; Stinton, A.J.; Patra, A.; Pitman, E.B.; Bauer, A.; Nichita, C.C. Evaluating Titan2D mass-flow model using the 1963 Little Tahoma Peak avalanches, Mount Rainier, Washington. J. Volcanol. Geoth. Res. 2005, 139, 89–102. [Google Scholar] [CrossRef]
- Charbonnier, S.J.; Gertisser, R. Numerical simulations of block-and-ash flows using the Titan2D flow model: Examples from the 2006 eruption of Merapi Volcano, Java, Indonesia. Bull. Volcanol. 2009, 71, 953–959. [Google Scholar] [CrossRef]
- Takeuchi, Y.; Nishimura, K.; Patra, A. Observations and numerical simulations of the braking effect of forests on large-scale avalanches. Ann. Glaciol. 2008, 59, 50–58. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Guillén, C.; Tsunematsu, K.; Nishimura, K.; Issler, D. Seismic location and tracking of snow avalanches and slush flows on Mt. Fuji, Japan. Earth Surf. Dyn. 2019, 7, 989–1007. [Google Scholar] [CrossRef] [Green Version]
- Pouliquen, O.; Forterre, Y. Friction law for dense granular flows: Application to the motion of a mass down a rough inclined plane. J. Fluid Mech. 2002, 453, 133–151. [Google Scholar] [CrossRef] [Green Version]
- Mangeney, A.; Bouchut, F.; Thomas, N.; Vilotte, J.P.; Bristeau, M.O. Numerical modeling of self-channeling granular flows and of their levee-channel deposits. J. Geophys. Res. 2007, 112, F02017. [Google Scholar] [CrossRef] [Green Version]
- Maeno, F.; Hogg, A.J.; Sparks, R.S.J.; Matson, G.P. Unconfined slumping of a granular mass on a slope. Phys. Fluids 2013, 25, 023302. [Google Scholar] [CrossRef]
- Groupement De Recherche Milieux Divisé. On dense granular flows. Eur. Phys. J. E 2004, 14, 341–365. [Google Scholar] [CrossRef]
- Edwards, A.; Viroulet, S.; Kokelaar, B.; Gray, J. Formation of levees, troughs and elevated channels by avalanches on erodible slopes. J. Fluid Mech. 2017, 823, 278–315. [Google Scholar] [CrossRef] [Green Version]
- Nishimura, K.; Maeno, N. Experiments on snow-avalanche dynamics. IAHS Publ. 1987, 162, 395–404. [Google Scholar]
- Platzer, K.; Bartelt, P.; Jaedicke, C. Basal shear and normal stresses of dry and wet snow avalanches after a slope deviation. Cold Reg. Sci. Technol. 2007, 49, 11–25. [Google Scholar] [CrossRef]
- Bartelt, P.; Valero, C.V.; Feistl, T.; Christen, M.; Bühler, Y.; Buser, O. Modelling cohesion in snow avalanche flow. J. Glaciol. 2015, 61, 837–850. [Google Scholar] [CrossRef] [Green Version]
- Issler, D.; Gauer, P.; Schaer, M.; Keller, S. Inferences on Mixed Snow Avalanches from Field Observations. Geosciences 2020, 10, 2. [Google Scholar] [CrossRef] [Green Version]
- Jop, P.; Forterre, Y.; Pouliquen, O. A constitutive law for dense granular flows. Nature 2006, 441, 727–730. [Google Scholar] [CrossRef] [Green Version]
- Pouliquen, O. Scaling laws in granular flows down rough inclined planes. Phys. Fluids 1999, 11, 542. [Google Scholar] [CrossRef]
- Pouliquen, O.; Cassar, C.; Jop, P.; Forterre, Y.; Nicolas, M. Flow of dense granular material: Towards simple constitutive laws. J. Stat. Mech. 2006, 2006, P07020. [Google Scholar] [CrossRef]
- Baker, J.L.; Barker, T.; Gray, J.M.N.T. A two-dimensional depth-averaged μ(I)-rheology for dense granular avalanches. J. Fluid Mech. 2016, 787, 367–395. [Google Scholar] [CrossRef] [Green Version]
- Leveque, R.J. Finite Volume Methods for Hyperbolic Problems, 1st ed.; Cambridge Texts in Applied Mathematics; Cambridge University Press: Cambridge, UK, 2002; pp. 15–420. [Google Scholar]
- Nishimura, K. Internal structure of snow avalanches. Meteorol. Res. Note 1998, 190, 21–36. (In Japanese) [Google Scholar]
- Steinkogler, W.; Gaume, J.; Löwe, H.; Sovilla, B.; Lehning, M. Granulation of snow: From tumbler experiments to discrete element simulations. J. Geophys. Res. Earth Surf. 2015, 120, 1107–1126. [Google Scholar] [CrossRef] [Green Version]
- Bartelt, P.; McArdell, W. Instruments and Methods Granulometric investigations of snow avalanches. J. Glaciol. 2009, 55, 829–833. [Google Scholar] [CrossRef] [Green Version]
- Barker, T.; Schaeffer, D.; Bohorquez, P.; Gray, J. Well-posed and ill-posed behaviour of the μ(I)-rheology for granular flow. J. Fluid Mech. 2015, 779, 794–818. [Google Scholar] [CrossRef] [Green Version]
- Forterre, Y.; Pouliquen, O. Flows of Dense Granular Media. Annu. Rev. Fluid Mech. 2008, 40, 1–24. [Google Scholar] [CrossRef] [Green Version]
- De Biagi, V.; Chiaia, B.; Frigo, B. Fractal grain distribution in snow avalanche deposits. J. Glaciol. 2012, 58, 340–346. [Google Scholar] [CrossRef] [Green Version]
- Bouchet, A.; Naaim, M.; Bellot, H.; Ousset, F. Experimental study of dense flow avalanches: Velocity profiles in steady and fully developed flows. Ann. Glaciol. 2004, 38, 30–34. [Google Scholar] [CrossRef]
- Takeuchi, Y.; Yamanoi, K.; Endo, Y.; Murakami, S.; Izumi, K. Velocities for the dry and wet snow avalanches at Makunosawa valley in Myoko, Japan. Cold Reg. Sci. Technol. 2003, 37, 483–486. [Google Scholar] [CrossRef]
- Suriñach, E.; Flores-Márquez, E.L.; Roig-Lafon, P.; Furdada, G.; Tapia, M. Estimation of Avalanche Development and Frontal Velocities Based on the Spectrogram of the Seismic Signals Generated at the Vallée de la Sionne Test Site. Geosciences 2020, 10, 113. [Google Scholar] [CrossRef] [Green Version]
- Gauer, P.; Kern, M.; Kristensen, K.; Lied, K.; Rammer, L.; Schreiber, H. On pulsed Doppler radar measurements of avalanches and their implication to avalanche dynamics. Cold Reg. Sci. Technol. 2007, 50, 55–71. [Google Scholar] [CrossRef]
- Rammer, L.; Kern, M.; Gruber, U.; Tiefenbacher, F. Comparison of avalanche-velocity measurements by means of pulsed Doppler radar, continuous wave radar and optical methods. Cold Reg. Sci. Technol. 2007, 50, 35–54. [Google Scholar] [CrossRef]
- Köhler, A.; McElwaine, J.N.; Sovilla, B. GEODAR Data and the Flow Regimes of Snow Avalanches. J. Geophys. Res. Earth Surf. 2018, 123, 1272–1294. [Google Scholar] [CrossRef]
- Gauer, P. Considerations on scaling behavior in avalanche flow along cycloidal and parabolic tracks. Cold Reg. Sci. Technol. 2018, 151, 34–46. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particle Diameter | ||||
|---|---|---|---|---|
| 10 cm | 1 cm | 1 mm | 0.1 mm | |
| Width (m) | 525 | 555 | 585 | 615 |
| Tail length (m) | 155 | 345 | 525 | 580 |
| δ2 = 28° | δ2 = 29° | δ2 = 30° | δ2 = 31° | δ2 = 32° | δ2 = 33° | δ2 = 34° | |
|---|---|---|---|---|---|---|---|
| δs = 20° | case 01 | case 05 | case 09 | case 13 | case 17 | case 21 | case 25 |
| δs = 22° | case 02 | case 06 | case 10 | case 14 | case 18 | case 22 | case 26 |
| δs = 24° | case 03 | case 07 | case 11 | case 15 | case 19 | case 23 | case 27 |
| δs = 26° | case 04 | case 08 | case 12 | case 16 | case 20 | case 24 | case 28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsunematsu, K.; Maeno, F.; Nishimura, K. Application of an Inertia Dependent Flow Friction Model to Snow Avalanches: Exploration of the Model Using a Ping-Pong Ball Experiment. Geosciences 2020, 10, 436. https://doi.org/10.3390/geosciences10110436
Tsunematsu K, Maeno F, Nishimura K. Application of an Inertia Dependent Flow Friction Model to Snow Avalanches: Exploration of the Model Using a Ping-Pong Ball Experiment. Geosciences. 2020; 10(11):436. https://doi.org/10.3390/geosciences10110436
Chicago/Turabian StyleTsunematsu, Kae, Fukashi Maeno, and Kouichi Nishimura. 2020. "Application of an Inertia Dependent Flow Friction Model to Snow Avalanches: Exploration of the Model Using a Ping-Pong Ball Experiment" Geosciences 10, no. 11: 436. https://doi.org/10.3390/geosciences10110436
APA StyleTsunematsu, K., Maeno, F., & Nishimura, K. (2020). Application of an Inertia Dependent Flow Friction Model to Snow Avalanches: Exploration of the Model Using a Ping-Pong Ball Experiment. Geosciences, 10(11), 436. https://doi.org/10.3390/geosciences10110436