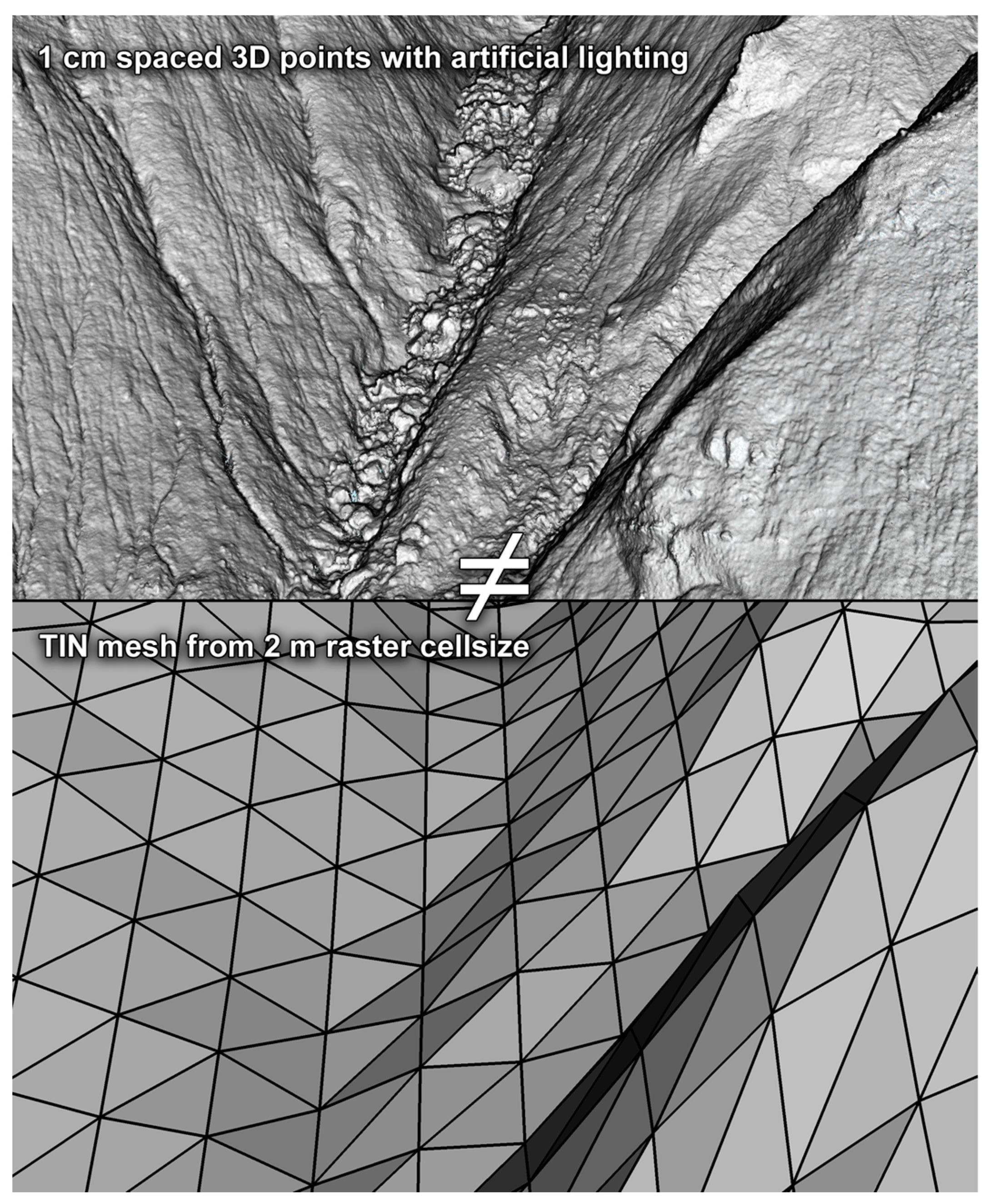
Figure 1.
Surface roughness is frequently lost when representing a site with a digital terrain model. On the lower image, most of the surface roughness is absent on the triangulated mesh from a gridded DTM raster with a 2 m cell size when compared to the same view with a 1 cm spaced 3D point cloud (upper image).
Figure 1.
Surface roughness is frequently lost when representing a site with a digital terrain model. On the lower image, most of the surface roughness is absent on the triangulated mesh from a gridded DTM raster with a 2 m cell size when compared to the same view with a 1 cm spaced 3D point cloud (upper image).
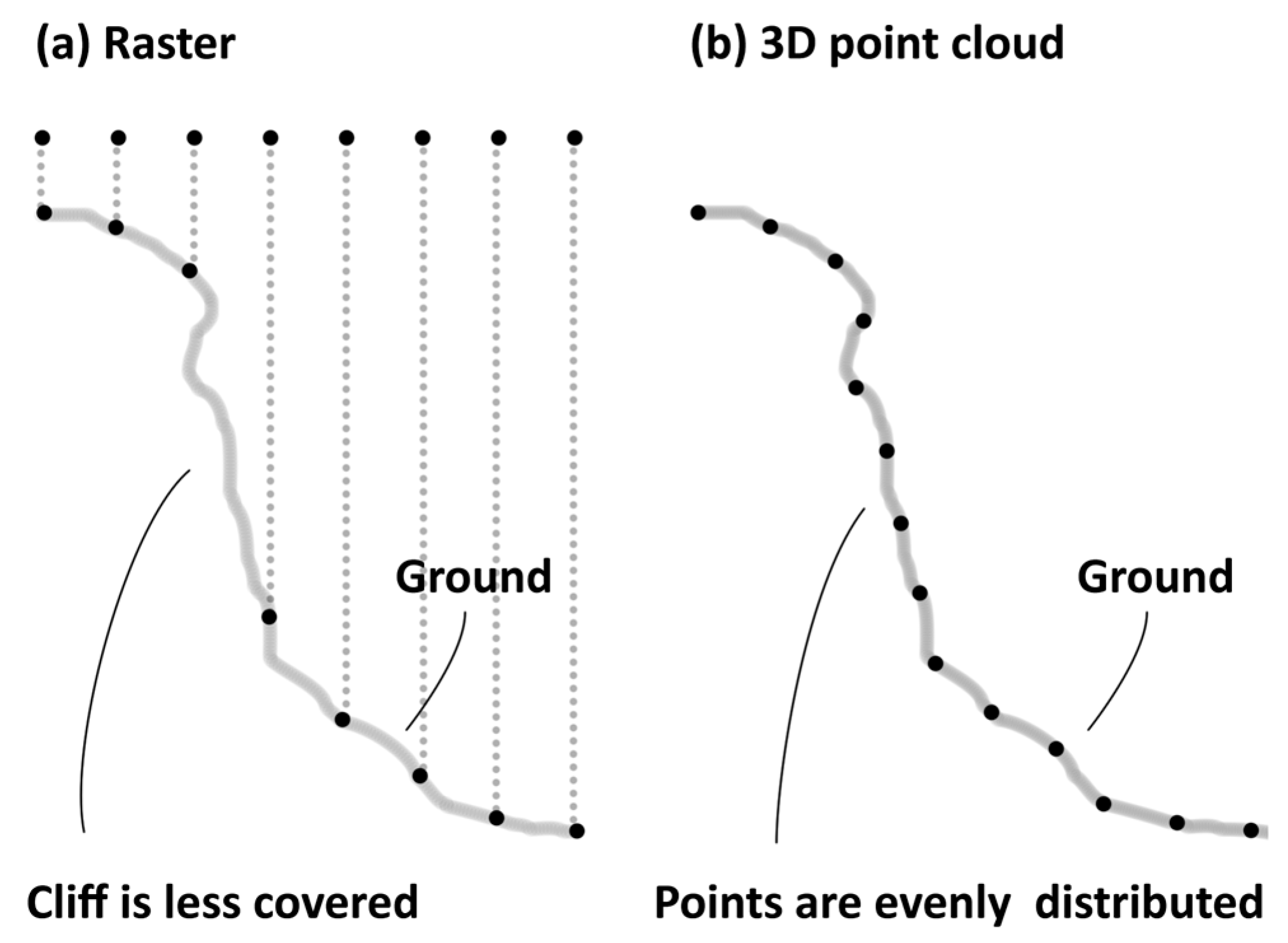
Figure 2.
Comparison of rasterized and point cloud terrain models. On the gridded terrain surface, the point density is not homogenous (a) and the near vertical face is underrepresented; however, in the 3D point cloud, the points can be evenly distributed (b).
Figure 2.
Comparison of rasterized and point cloud terrain models. On the gridded terrain surface, the point density is not homogenous (a) and the near vertical face is underrepresented; however, in the 3D point cloud, the points can be evenly distributed (b).
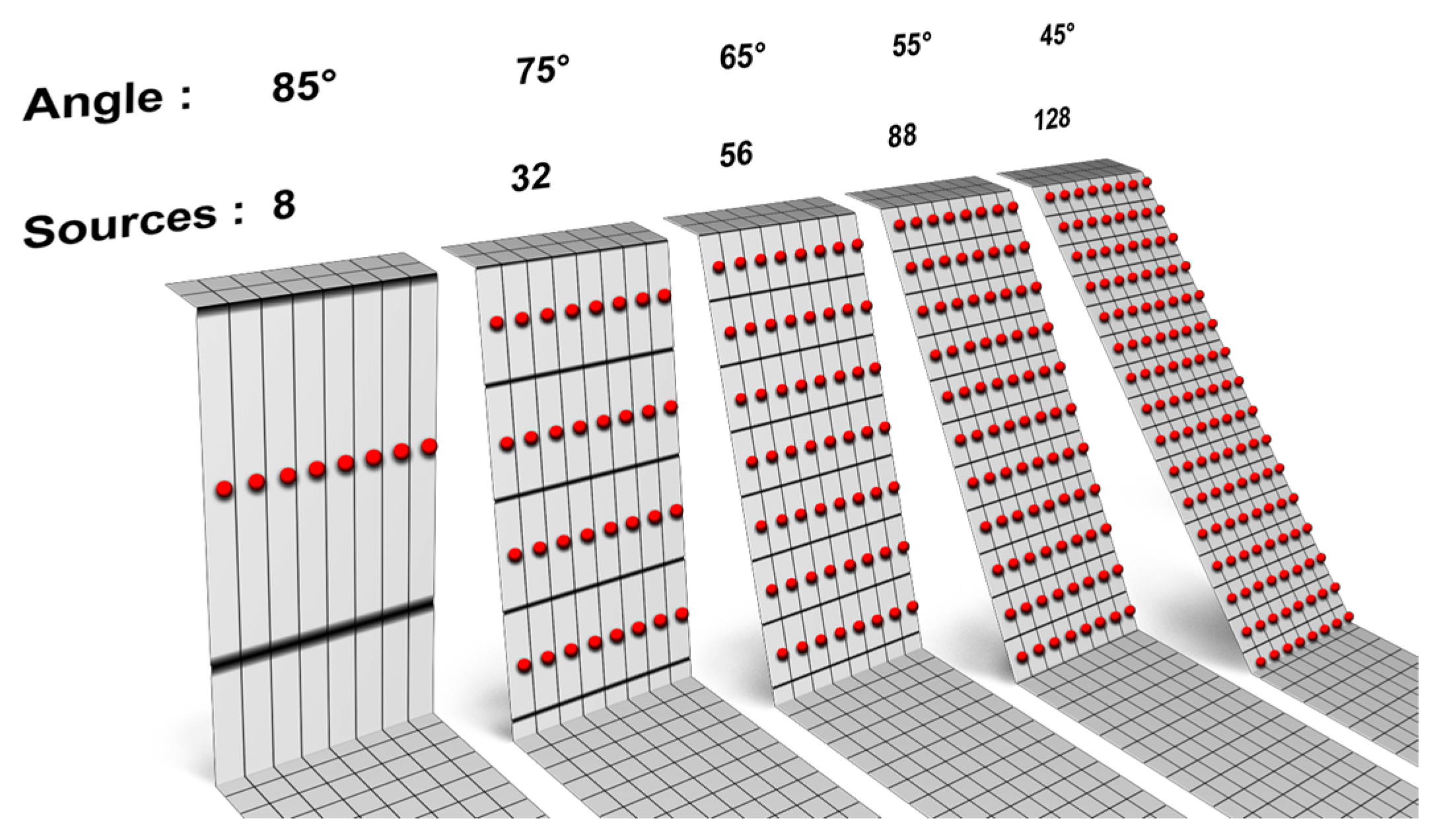
Figure 3.
Strong biases affect the source distribution on the gridded DTM (raster). Here, the 45° steep slope has 128 pixels used as rockfall sources while the 85° slope only has 8 pixels that can be rockfall sources.
Figure 3.
Strong biases affect the source distribution on the gridded DTM (raster). Here, the 45° steep slope has 128 pixels used as rockfall sources while the 85° slope only has 8 pixels that can be rockfall sources.
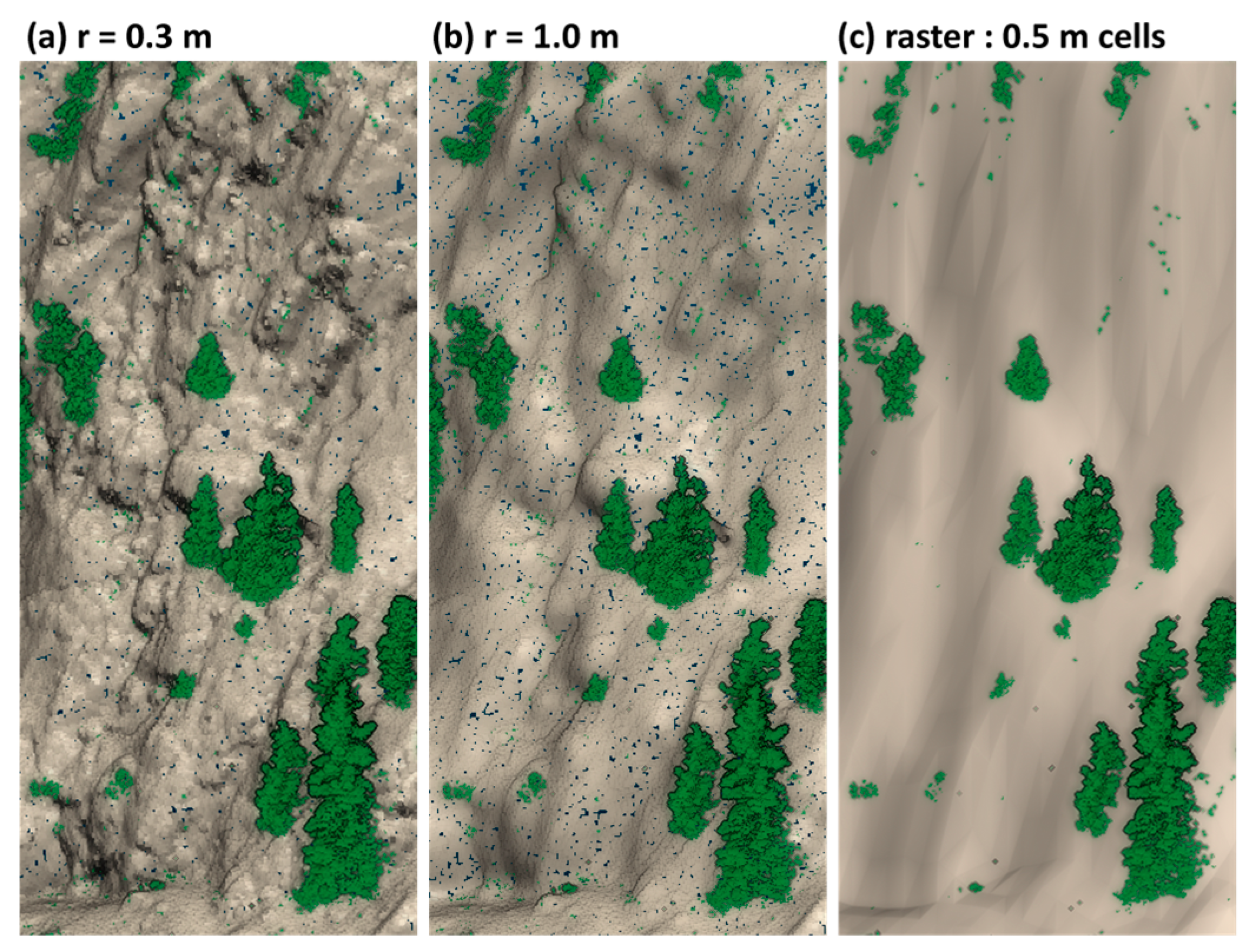
Figure 4.
Smoothing of the terrain surface resulting from the surface orientation calculation using a plane fitting method with different radii (r) on point clouds (a,b) compared to the important smoothing of rasterized data (c). The vegetation was removed from the point cloud and raster to compute the orientation and is shown here as a scale. The bottom-right tree is 9 m high.
Figure 4.
Smoothing of the terrain surface resulting from the surface orientation calculation using a plane fitting method with different radii (r) on point clouds (a,b) compared to the important smoothing of rasterized data (c). The vegetation was removed from the point cloud and raster to compute the orientation and is shown here as a scale. The bottom-right tree is 9 m high.
Figure 5.
Distinction between the terrain orientation and the orientation perceived by rocks moving from left to right when encountering a local bump. Neglecting any scarring, the local terrain orientation does not change; however, the perceived orientation depends on the size of the rocks. For the smallest rock, all incident velocities can be decomposed as a normal component to the terrain. For the medium-sized rock, the normal velocity component is larger than the tangential velocity component. The normal velocity component is smaller than the tangent velocity component for the largest impacting rock. The smoothing effect of a low-resolution terrain model can also be illustrated by doubling the width of the local bump and reducing its height by half.
Figure 5.
Distinction between the terrain orientation and the orientation perceived by rocks moving from left to right when encountering a local bump. Neglecting any scarring, the local terrain orientation does not change; however, the perceived orientation depends on the size of the rocks. For the smallest rock, all incident velocities can be decomposed as a normal component to the terrain. For the medium-sized rock, the normal velocity component is larger than the tangential velocity component. The normal velocity component is smaller than the tangent velocity component for the largest impacting rock. The smoothing effect of a low-resolution terrain model can also be illustrated by doubling the width of the local bump and reducing its height by half.
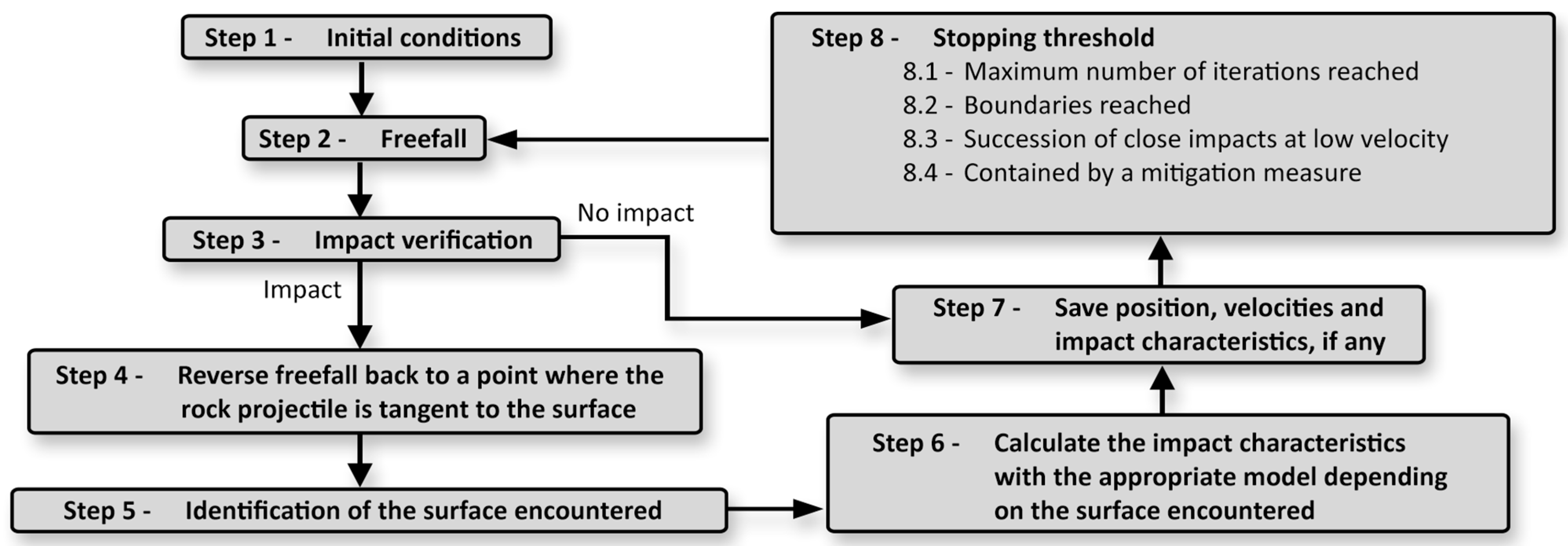
Figure 6.
Main steps of the impact-detection algorithm on point clouds.
Figure 6.
Main steps of the impact-detection algorithm on point clouds.
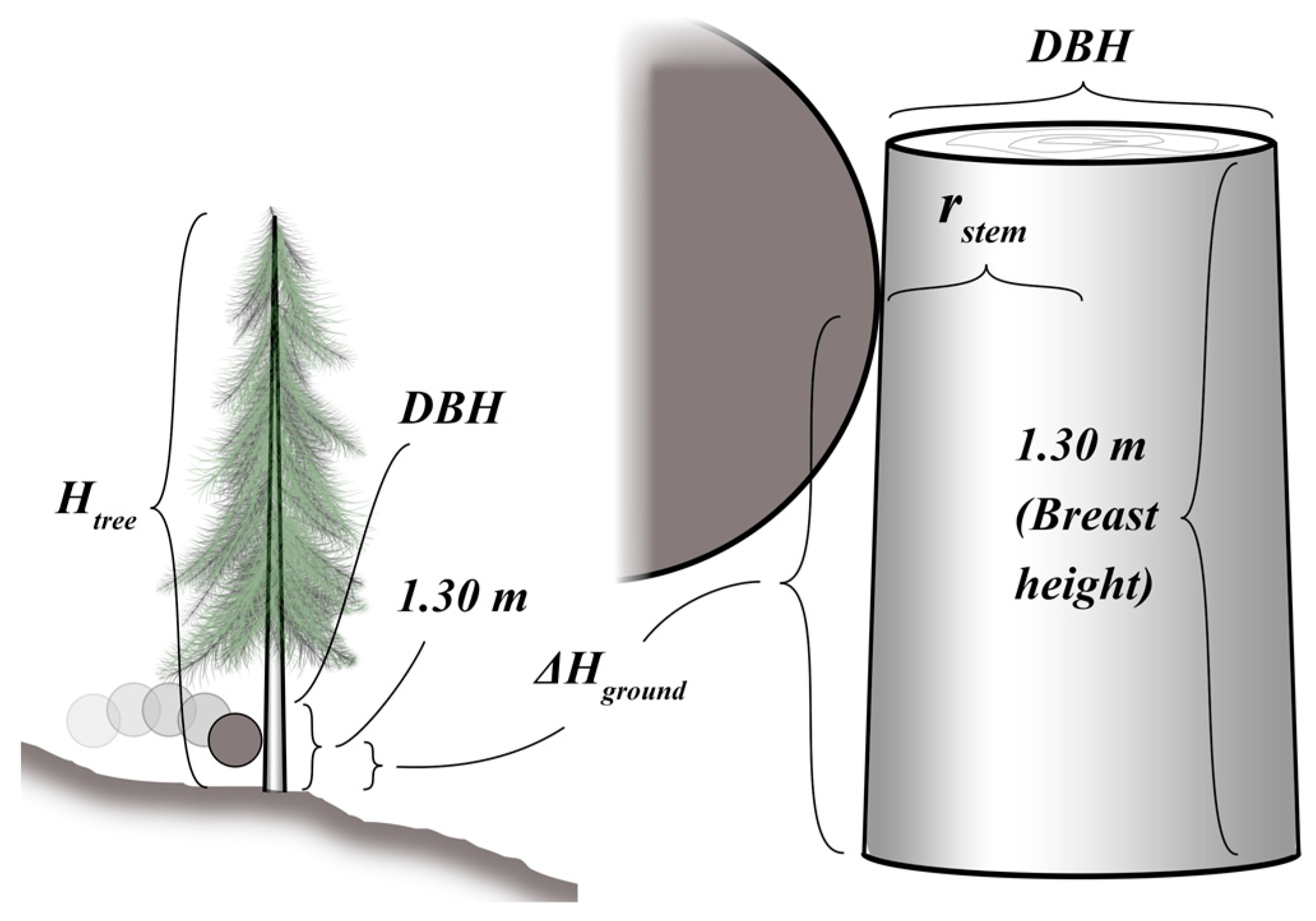
Figure 7.
Parameters for the impacts against tree stems simplified as tall cones.
Figure 7.
Parameters for the impacts against tree stems simplified as tall cones.
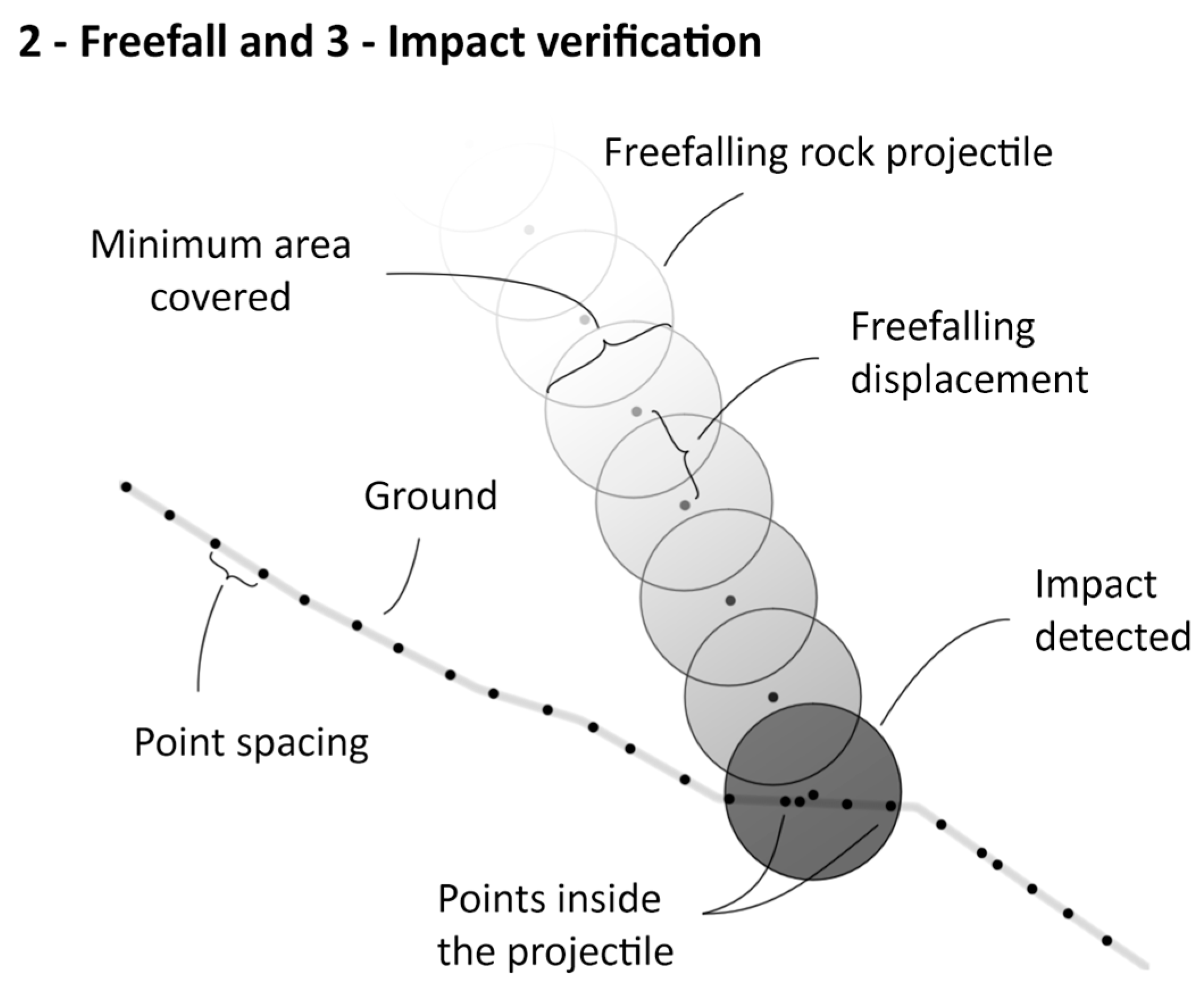
Figure 8.
Algorithm steps 2 and 3. Freefalling positions are shown in gradations of gray. Impact verification is performed for each position. An impact is detected when there are points inside the falling rock. The point spacing must be smaller than the width of the minimum area covered and generally provides the optimum results at ¼ of d1.
Figure 8.
Algorithm steps 2 and 3. Freefalling positions are shown in gradations of gray. Impact verification is performed for each position. An impact is detected when there are points inside the falling rock. The point spacing must be smaller than the width of the minimum area covered and generally provides the optimum results at ¼ of d1.
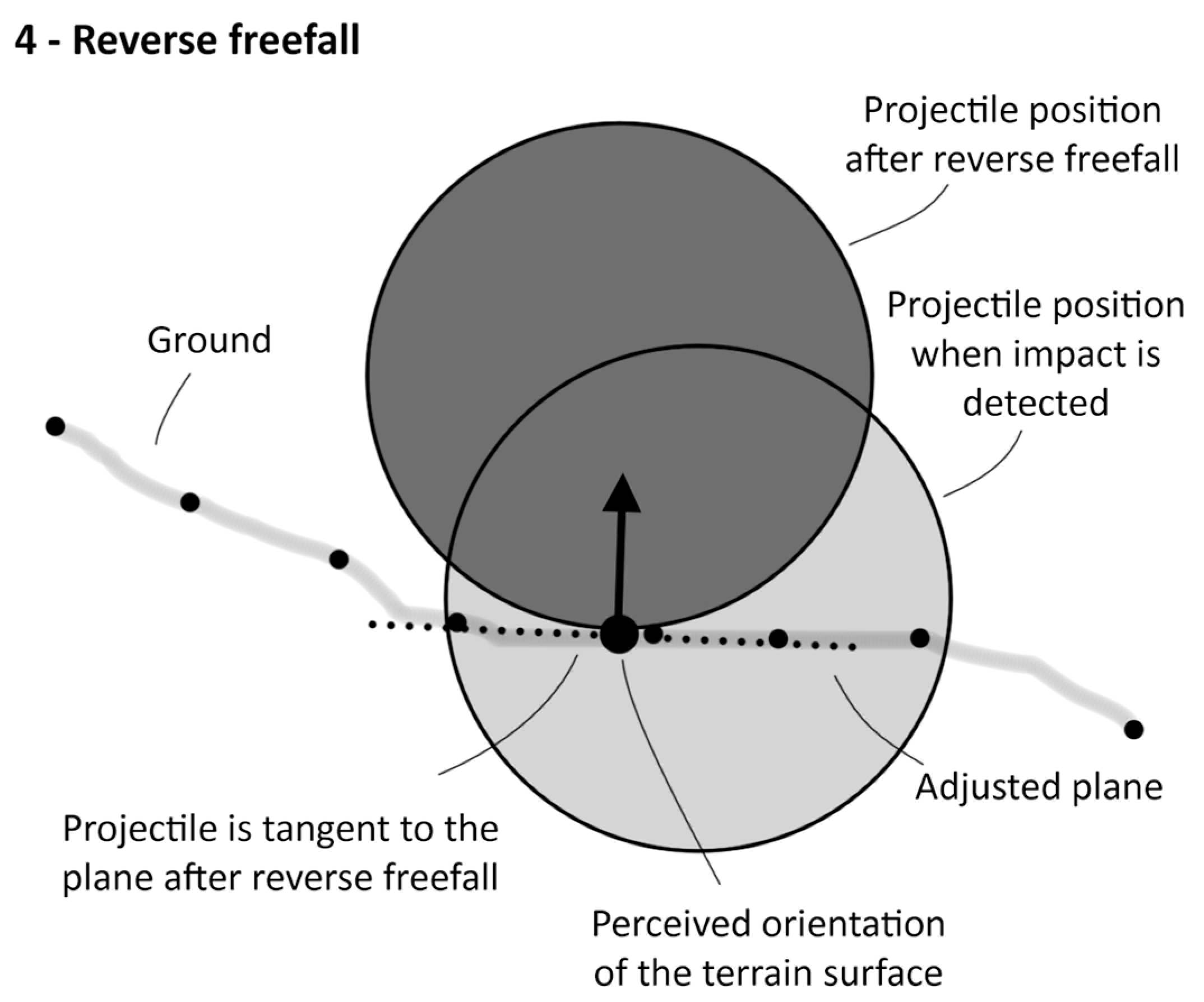
Figure 9.
Algorithm step 4. The impact’s location is adjusted by reverting the freefall preceding step 3 (
Figure 6c) until the rock is tangent to the surface. In this figure, the perceived surface is the best fitted plane of the points identified in a radius of ½
d1 from the last point to be tangent to the rock when reverting the freefall. If the fit is bad or if a tree is impacted, then the last tangent point is simply used as the local surface.
Figure 9.
Algorithm step 4. The impact’s location is adjusted by reverting the freefall preceding step 3 (
Figure 6c) until the rock is tangent to the surface. In this figure, the perceived surface is the best fitted plane of the points identified in a radius of ½
d1 from the last point to be tangent to the rock when reverting the freefall. If the fit is bad or if a tree is impacted, then the last tangent point is simply used as the local surface.
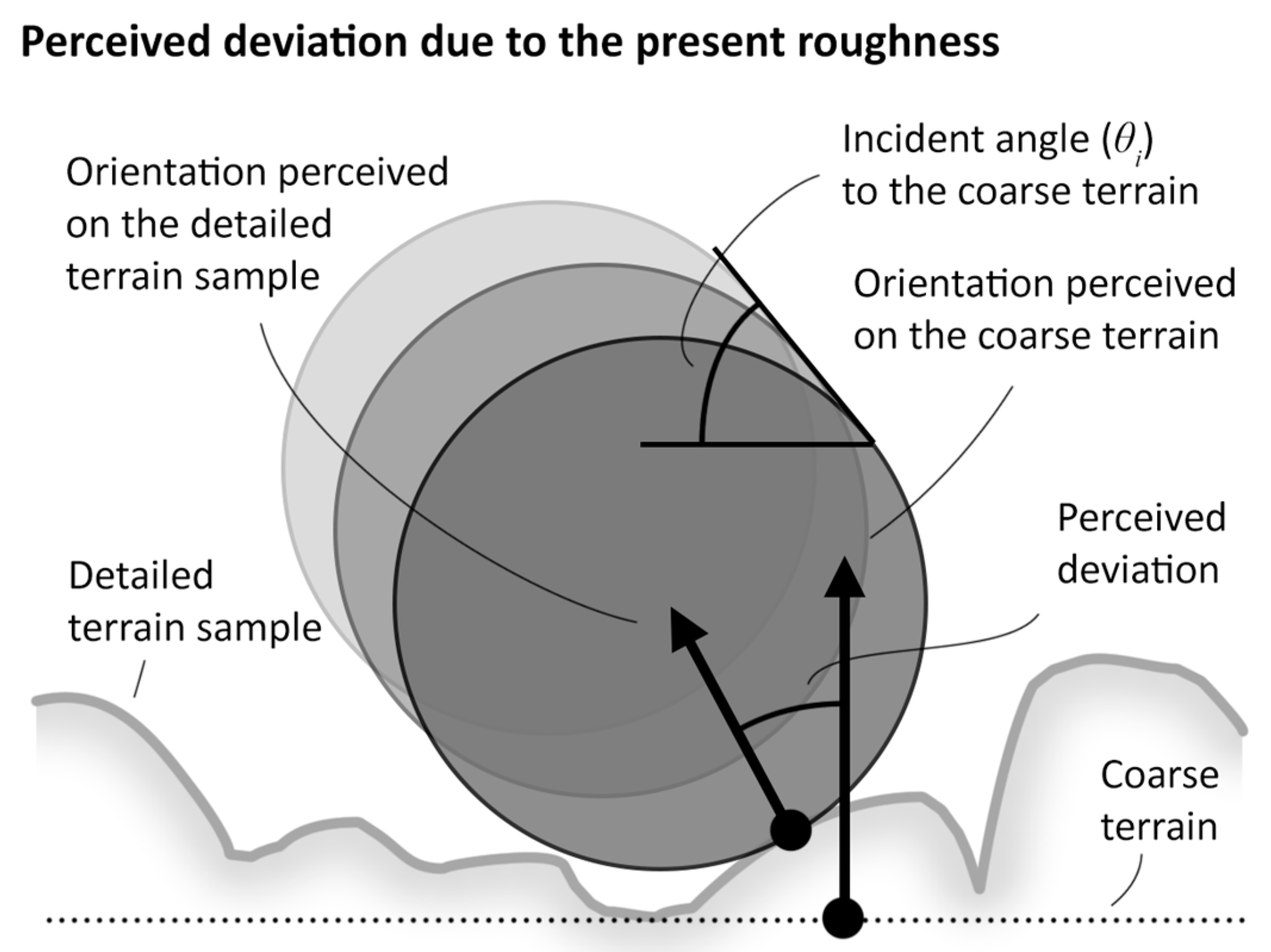
Figure 10.
Measurement of the perceived deviation on the difference of DTM (DoD), represented here by the layer “Detailed terrain sample” combined with a flat “Coarse terrain”. The perceived deviation varies depending on the applied incident angle because some part of the terrain cannot be reached at shallow impact angles. In this 2D representation, the deviation measured is called vertical deviation. The lateral deviation is measured in the vertical plane perpendicular to the vertical profile of this figure (deviating toward the reader, or the opposite).
Figure 10.
Measurement of the perceived deviation on the difference of DTM (DoD), represented here by the layer “Detailed terrain sample” combined with a flat “Coarse terrain”. The perceived deviation varies depending on the applied incident angle because some part of the terrain cannot be reached at shallow impact angles. In this 2D representation, the deviation measured is called vertical deviation. The lateral deviation is measured in the vertical plane perpendicular to the vertical profile of this figure (deviating toward the reader, or the opposite).
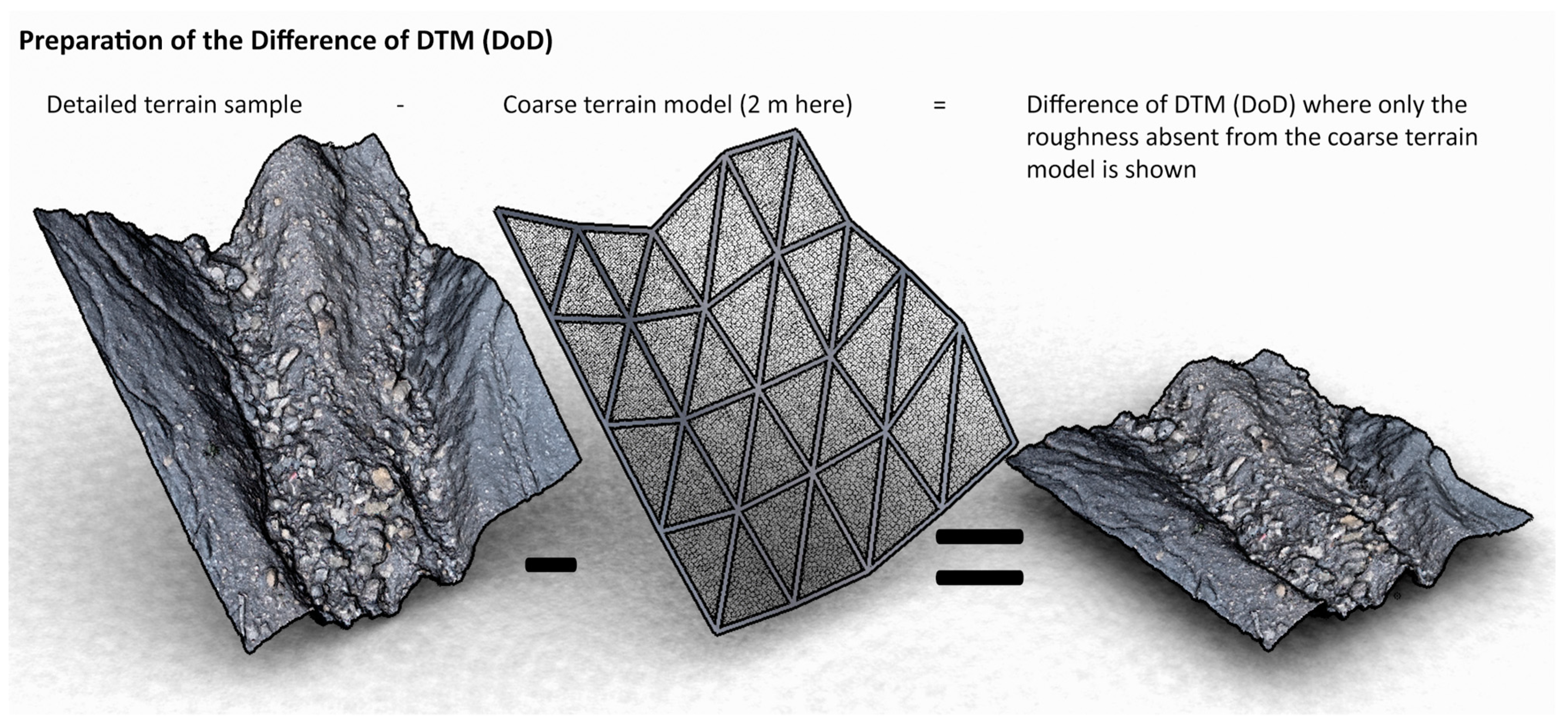
Figure 11.
Preparation of the DTM difference (DoD) is performed by subtracting the elevation from the coarse terrain model (on which rockfall simulation might be performed) from the elevation of the detailed terrain sample. This approach extracts the roughness of the detailed terrain model and removes the global terrain orientations present on the coarse model.
Figure 11.
Preparation of the DTM difference (DoD) is performed by subtracting the elevation from the coarse terrain model (on which rockfall simulation might be performed) from the elevation of the detailed terrain sample. This approach extracts the roughness of the detailed terrain model and removes the global terrain orientations present on the coarse model.
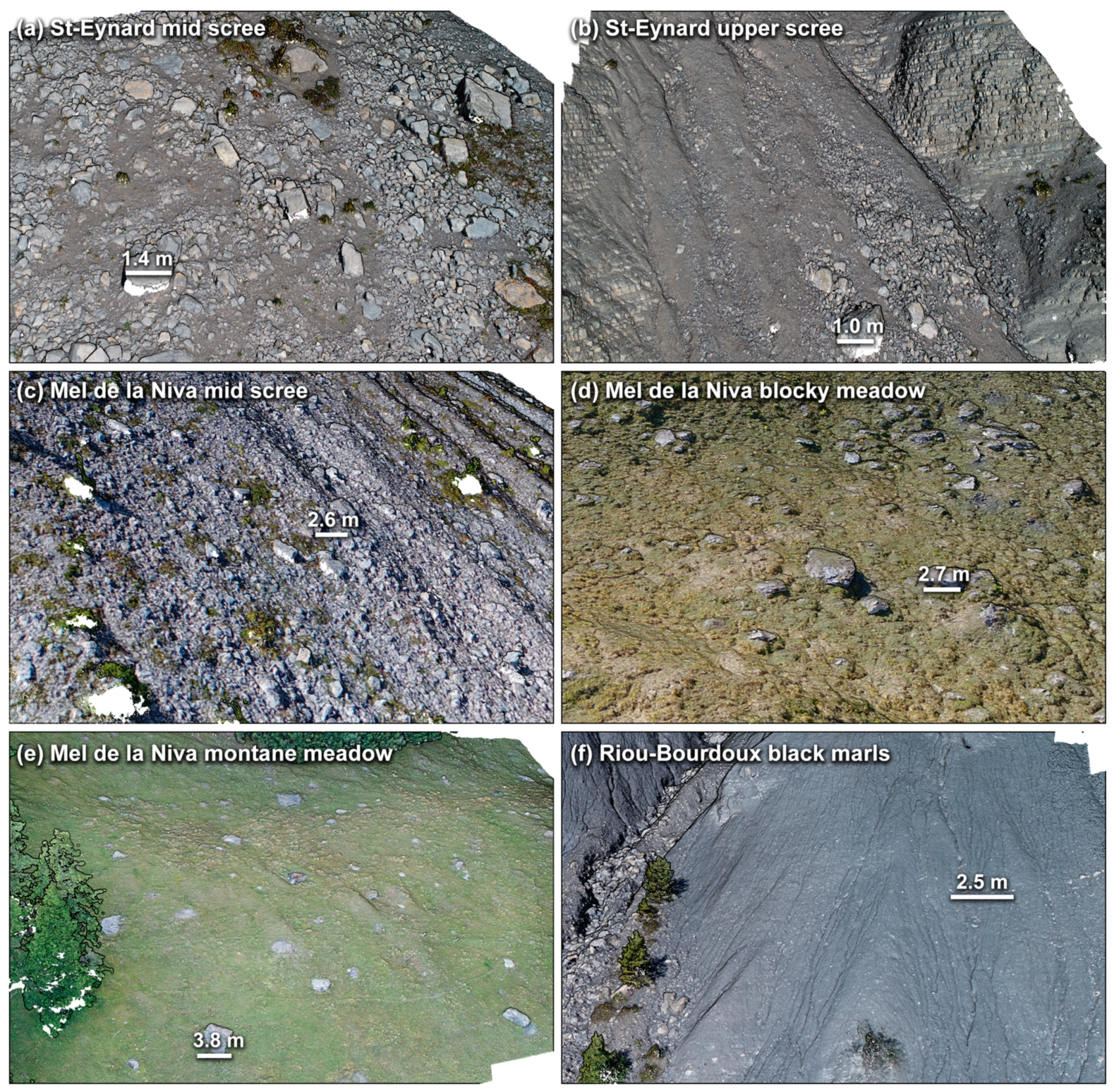
Figure 12.
Six selected sites for their characteristic surface roughness encountered on rockfall-prone terrain. The central section of each 3D scene was isolated to extract its surface roughness. Here, each scene is shown with the 3D SfM model textured and with contours of the foreground elements highlighted using the Eye Dome Lighting filter.
Figure 12.
Six selected sites for their characteristic surface roughness encountered on rockfall-prone terrain. The central section of each 3D scene was isolated to extract its surface roughness. Here, each scene is shown with the 3D SfM model textured and with contours of the foreground elements highlighted using the Eye Dome Lighting filter.
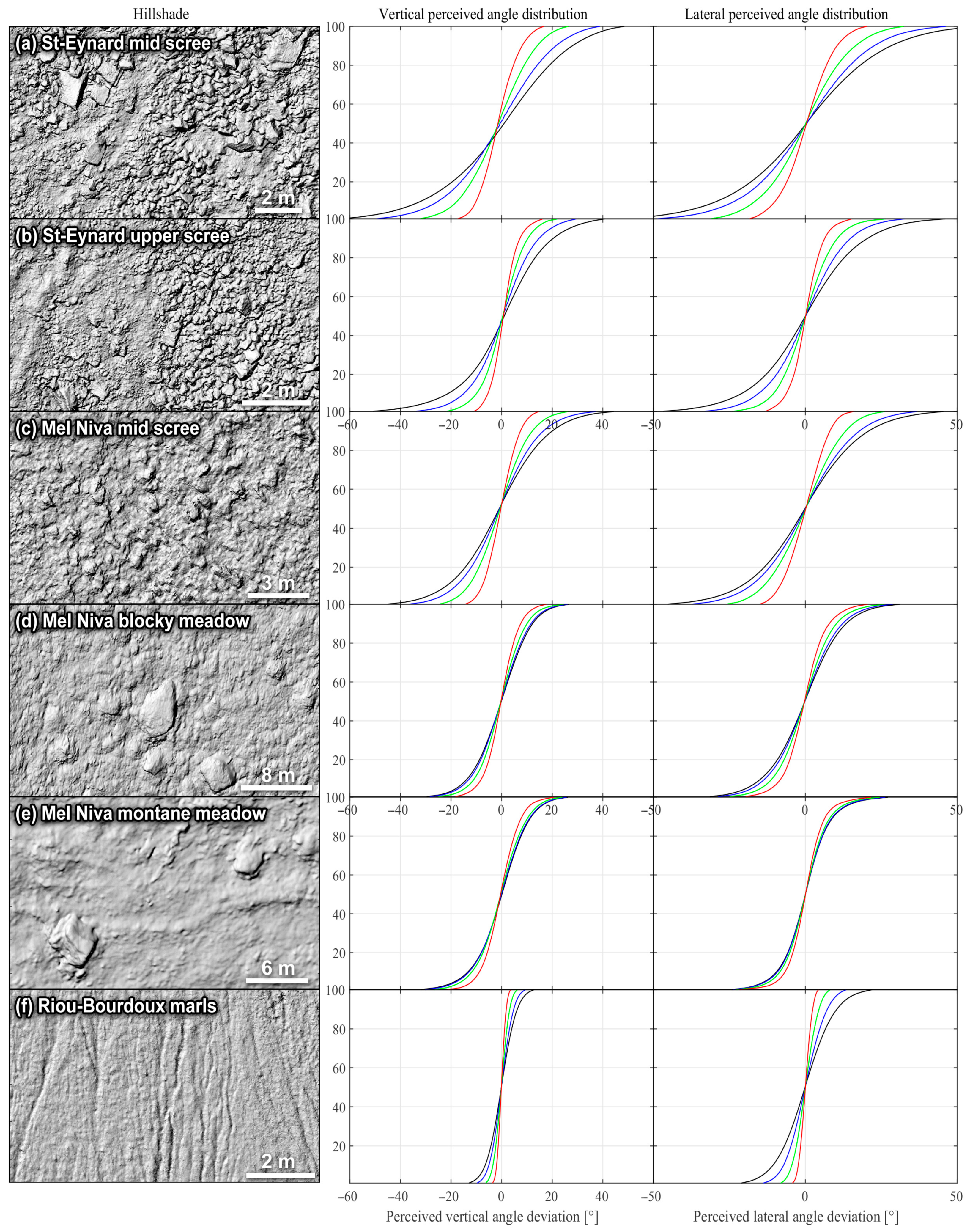
Figure 13.
Vertical and lateral perceived deviation angles for the six tested sites with four different impacting rock sizes (more than 20 million detected impacts summarized here). The left column shows the surface’s shaded top views of the sites. The middle column shows the vertical perceived deviation angles. The right column shows the lateral perceived deviation angles. The vertical axis of each graph corresponds to the centiles. The results for the 0.3, 1.0, 3.0 and 10 m wide rocks are represented with black, blue, green, and red lines, respectively.
Figure 13.
Vertical and lateral perceived deviation angles for the six tested sites with four different impacting rock sizes (more than 20 million detected impacts summarized here). The left column shows the surface’s shaded top views of the sites. The middle column shows the vertical perceived deviation angles. The right column shows the lateral perceived deviation angles. The vertical axis of each graph corresponds to the centiles. The results for the 0.3, 1.0, 3.0 and 10 m wide rocks are represented with black, blue, green, and red lines, respectively.
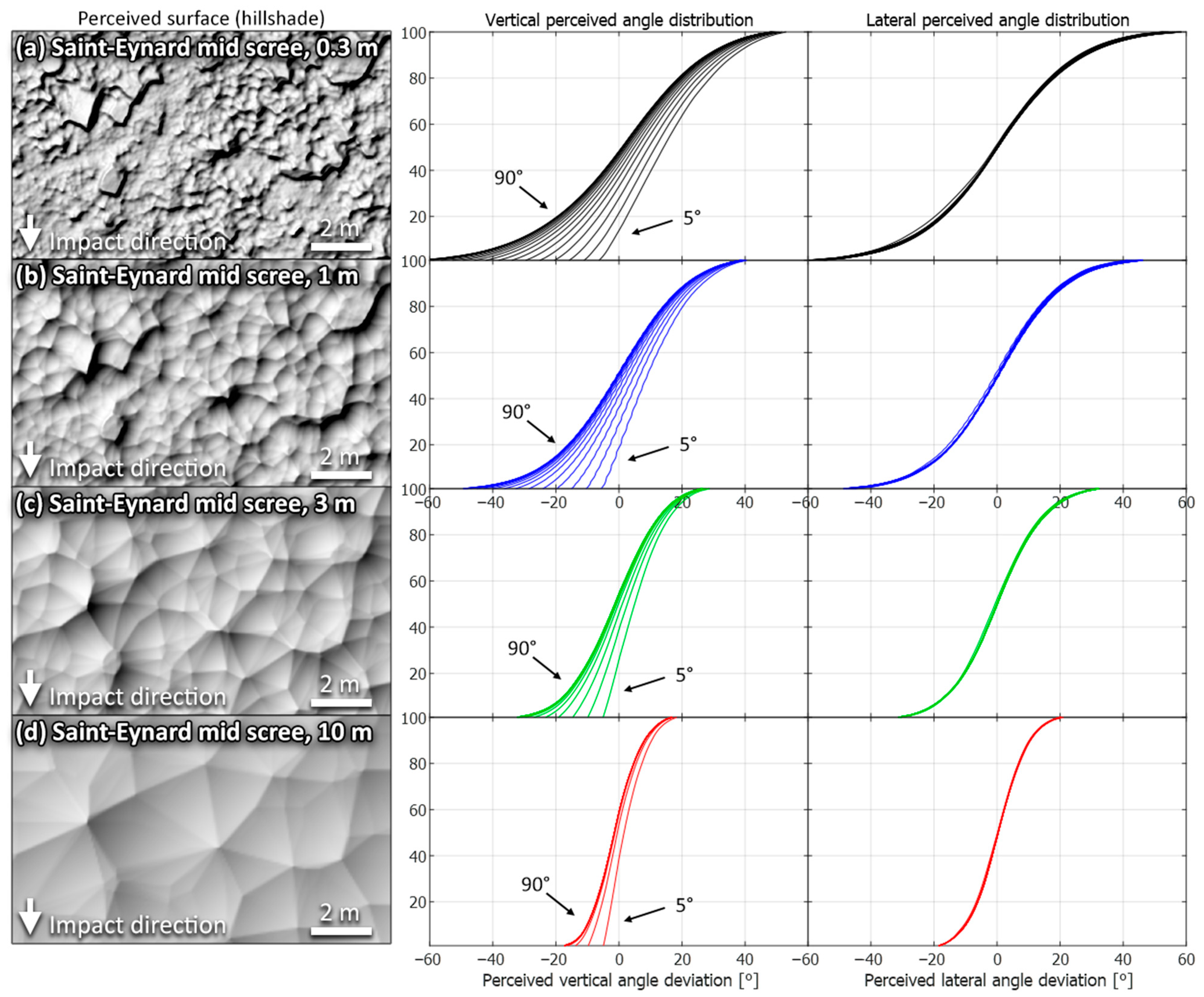
Figure 14.
Vertical and lateral perceived deviation angles for the Saint-Eynard mid-scree site with four different impacting rock sizes (more than 60 million detected impacts summarized here). The left column shows how the rocks perceive the surface, with shaded top views of the sites. The middle column shows the vertical perceived deviation angles for the 18 incident angles (5° to 90° in 5° increments). The right column shows the lateral perceived deviation angles. The vertical axis of each graph corresponds to the centiles. The results for the 0.3, 1.0, 3.0 and 10 m wide impacting rocks are represented with black, blue, green and red lines, respectively.
Figure 14.
Vertical and lateral perceived deviation angles for the Saint-Eynard mid-scree site with four different impacting rock sizes (more than 60 million detected impacts summarized here). The left column shows how the rocks perceive the surface, with shaded top views of the sites. The middle column shows the vertical perceived deviation angles for the 18 incident angles (5° to 90° in 5° increments). The right column shows the lateral perceived deviation angles. The vertical axis of each graph corresponds to the centiles. The results for the 0.3, 1.0, 3.0 and 10 m wide impacting rocks are represented with black, blue, green and red lines, respectively.
Figure 15.
Parameters for the impact model against tree stems. The lateral offset is measured from the center of the stem to the contact point with the impacting rock, perpendicular to the initial velocity in the horizontal plane.
Figure 15.
Parameters for the impact model against tree stems. The lateral offset is measured from the center of the stem to the contact point with the impacting rock, perpendicular to the initial velocity in the horizontal plane.
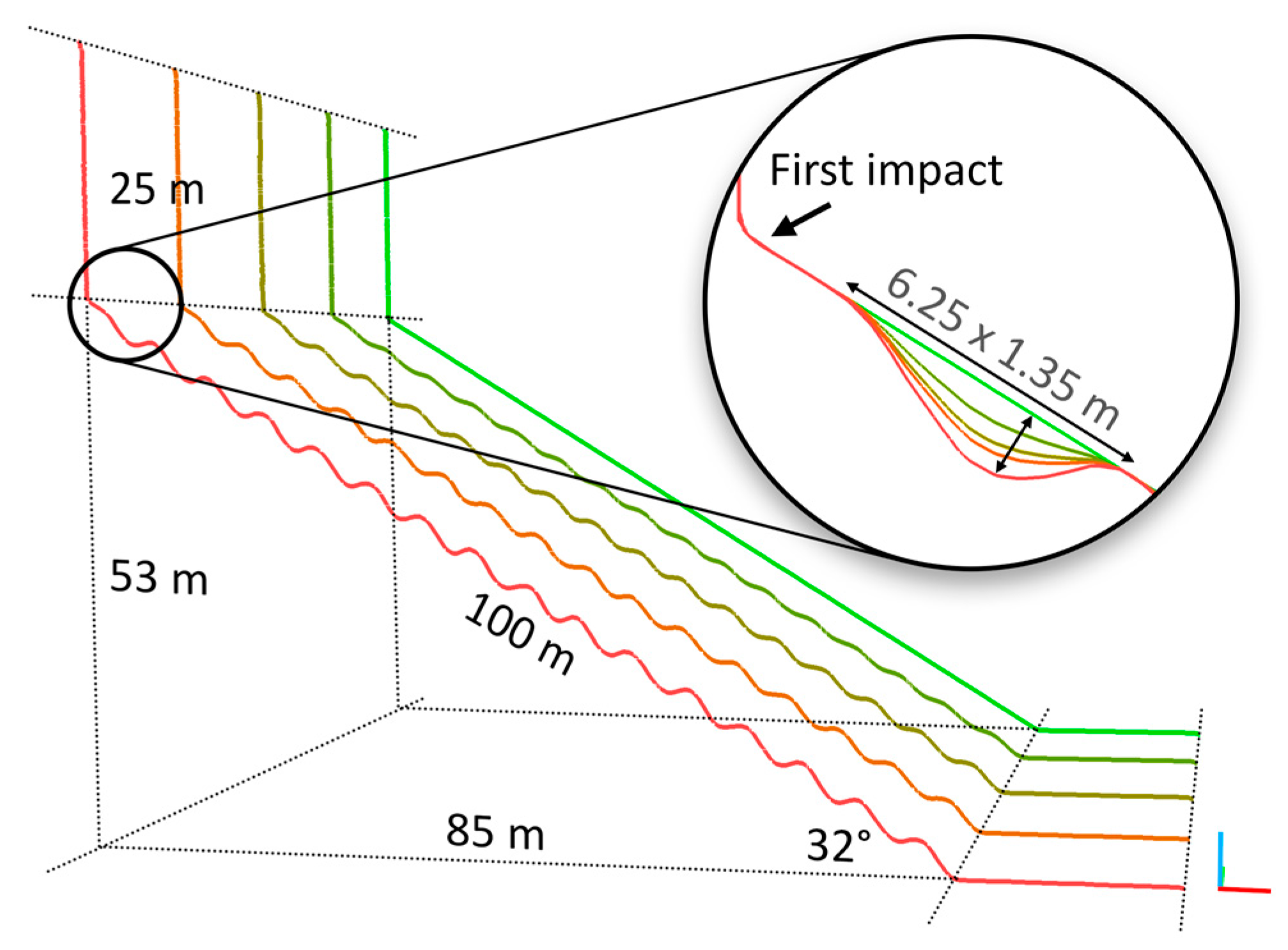
Figure 16.
Profile of the five artificial slopes with different roughnesses. The undulations only begin after 2 m horizontally to ensure that the first impact has the same geometry. The vertical part of the profile was not considered for the simulation; it is only shown here to demonstrate the freefalling height preceding the first impact. The XZ plane space is parallel to the trihedron respective red–blue axes.
Figure 16.
Profile of the five artificial slopes with different roughnesses. The undulations only begin after 2 m horizontally to ensure that the first impact has the same geometry. The vertical part of the profile was not considered for the simulation; it is only shown here to demonstrate the freefalling height preceding the first impact. The XZ plane space is parallel to the trihedron respective red–blue axes.
Figure 17.
Two real sites where the algorithm was tested to simulate rockfalls. (a) Gros Bras Mountains located in Canada. The scree slope composed of many large rock fragments is clearly visible. (b) Moderately steep alpine slope near La Verda–Rougemont in Switzerland. Impact marks and boulders from a 2019 rockfall event and older events are visible. The forest has stems of 57 cm DBH on average (Std Dev of 23 cm).
Figure 17.
Two real sites where the algorithm was tested to simulate rockfalls. (a) Gros Bras Mountains located in Canada. The scree slope composed of many large rock fragments is clearly visible. (b) Moderately steep alpine slope near La Verda–Rougemont in Switzerland. Impact marks and boulders from a 2019 rockfall event and older events are visible. The forest has stems of 57 cm DBH on average (Std Dev of 23 cm).
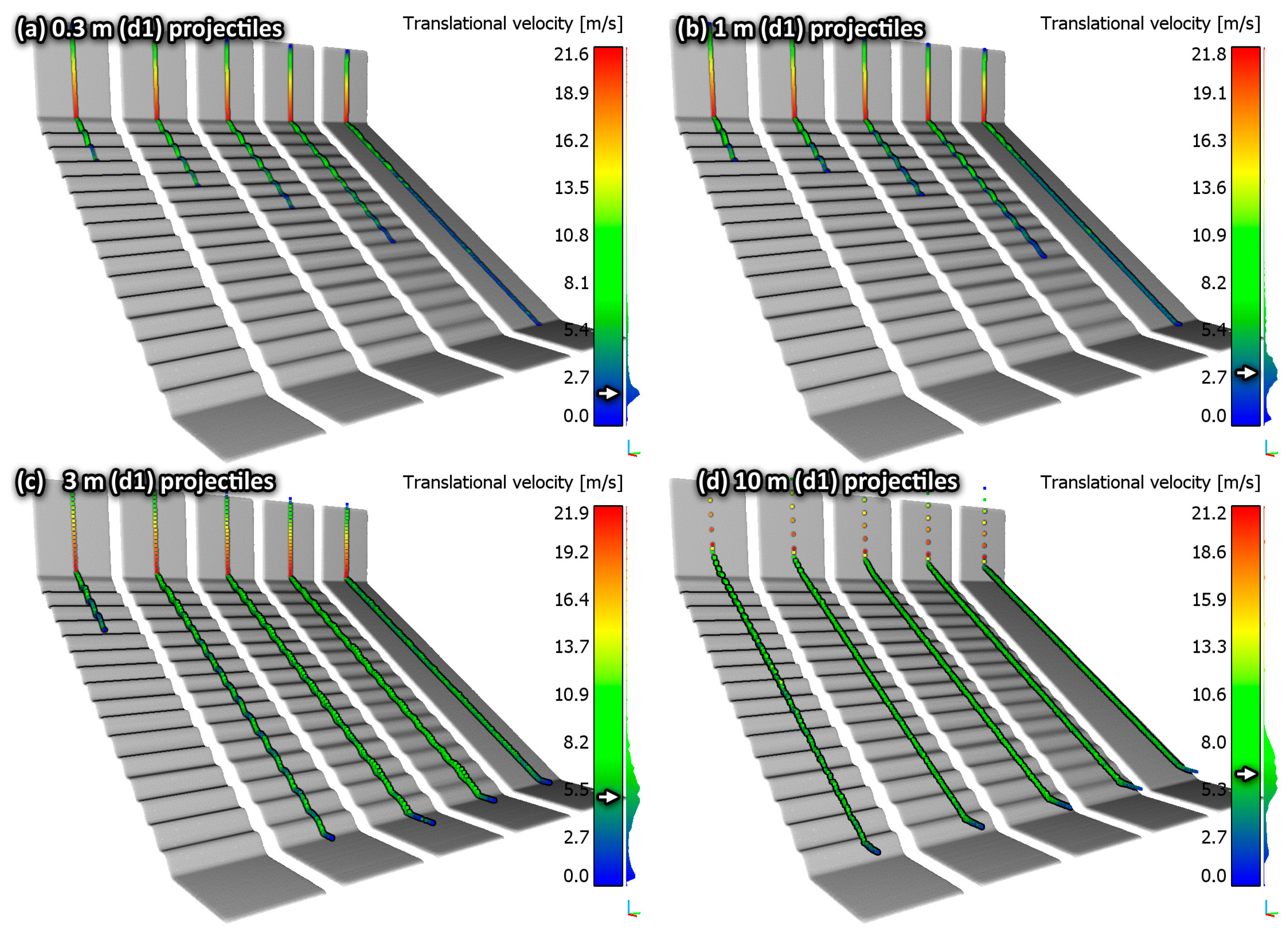
Figure 18.
Centerline of the simulated rockfalls (10 per slope) for rocks of different sizes on the artificial slopes of the first site. They are colored based on their translational velocities. The translational velocities increase as the size of the falling rocks increases, which is highlighted on the histograms next to the scale bars with the white arrows. Additionally, the centerline of the trajectories is properly offset to the terrain in relation to the radius of the different rock.
Figure 18.
Centerline of the simulated rockfalls (10 per slope) for rocks of different sizes on the artificial slopes of the first site. They are colored based on their translational velocities. The translational velocities increase as the size of the falling rocks increases, which is highlighted on the histograms next to the scale bars with the white arrows. Additionally, the centerline of the trajectories is properly offset to the terrain in relation to the radius of the different rock.
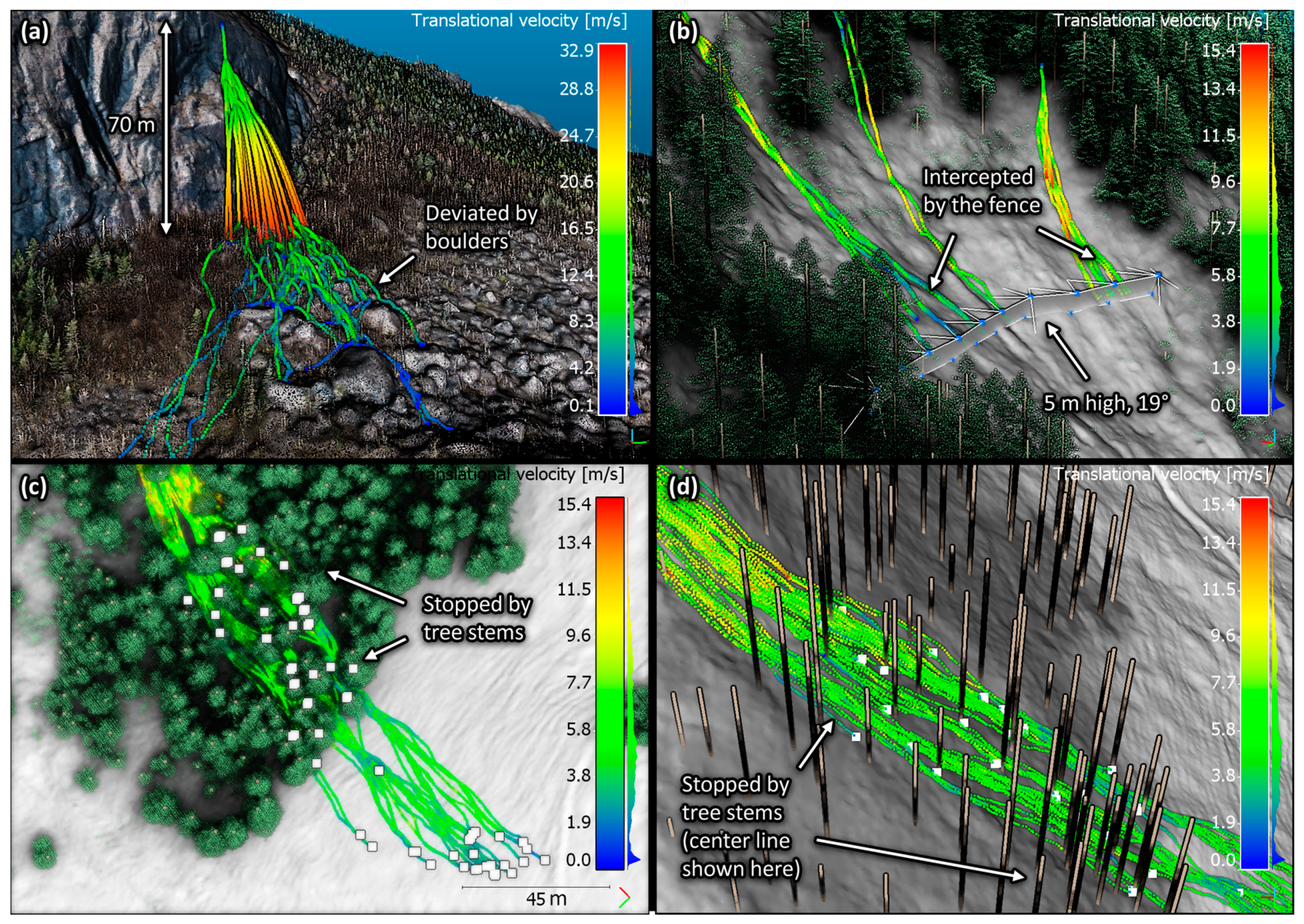
Figure 19.
Centerline of 20 selected simulated trajectories on the second site (Gros Bras Mount, Canada) in (a) and 130 on the third site (La Verda–Rougemont, Switzerland) in (b–d). The trajectories are colored based on their translational velocities. The central line of the stems considered for the simulations on the third site is shown by the vertical brown lines. The center of mass of the rocks when they stopped is shown in (c,d) by the white squares.
Figure 19.
Centerline of 20 selected simulated trajectories on the second site (Gros Bras Mount, Canada) in (a) and 130 on the third site (La Verda–Rougemont, Switzerland) in (b–d). The trajectories are colored based on their translational velocities. The central line of the stems considered for the simulations on the third site is shown by the vertical brown lines. The center of mass of the rocks when they stopped is shown in (c,d) by the white squares.
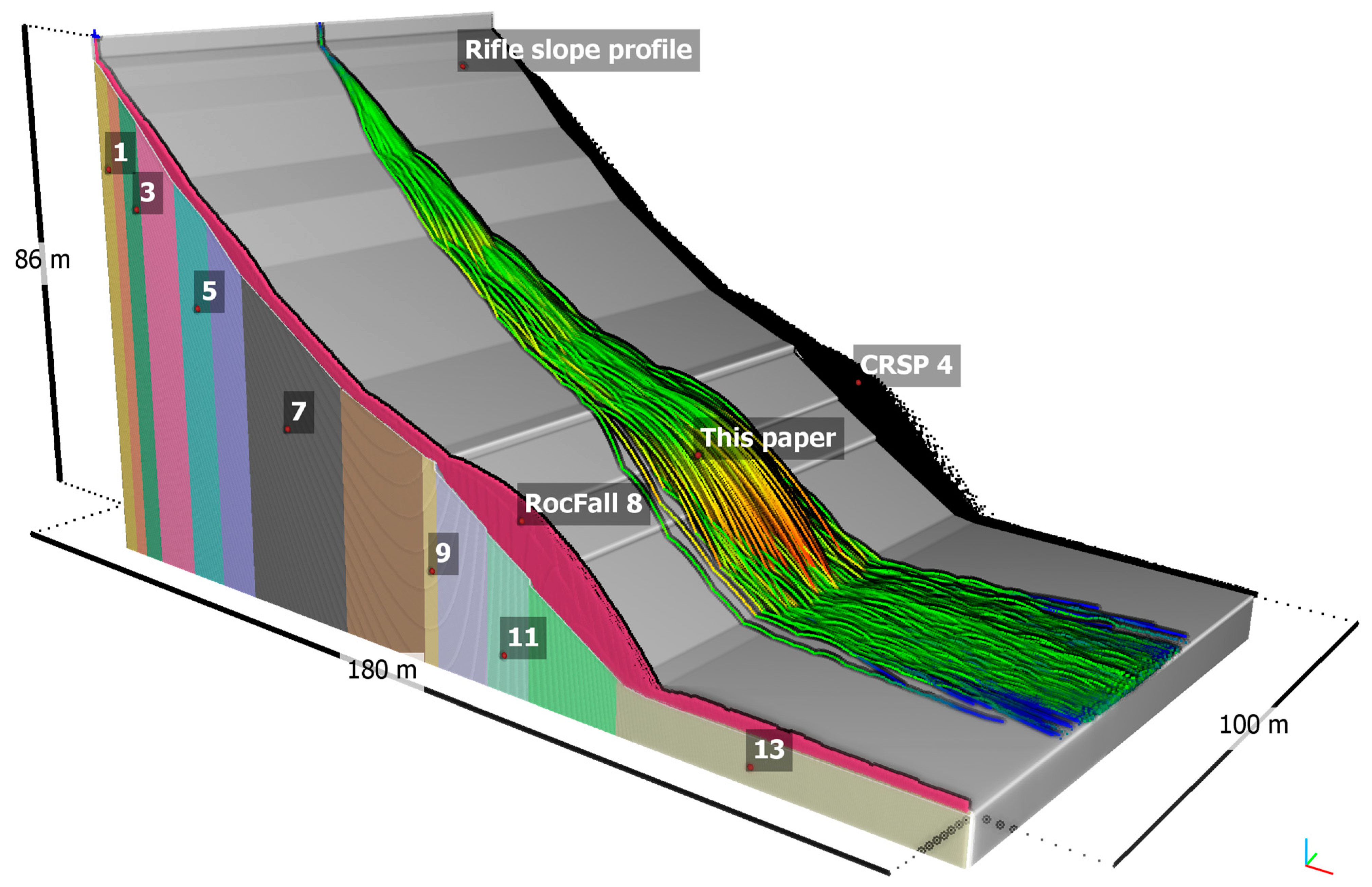
Figure 20.
Rifle rockfall test site used for the comparison. The different cells with attributed terrain materials are shown with vertical colored bands and numbers. The 10,000 trajectories simulated with each software and the presented algorithm (this paper) combined with the same impact model as the others are shown in magenta for RocFall 8, in graded colors for the proposed algorithm and in black for CRSP 4. The results of CRSP 4 were created using the original damping coefficients and artificial terrain roughness for the 13 cells found to reproduce the data from the original rockfall experiment performed at that site [
6,
16,
17]. Surprisingly, they had to be modified to new adjusted values with RocFall 8 and the proposed algorithm to produce the results shown above, which match the CRSP 4 results.
Figure 20.
Rifle rockfall test site used for the comparison. The different cells with attributed terrain materials are shown with vertical colored bands and numbers. The 10,000 trajectories simulated with each software and the presented algorithm (this paper) combined with the same impact model as the others are shown in magenta for RocFall 8, in graded colors for the proposed algorithm and in black for CRSP 4. The results of CRSP 4 were created using the original damping coefficients and artificial terrain roughness for the 13 cells found to reproduce the data from the original rockfall experiment performed at that site [
6,
16,
17]. Surprisingly, they had to be modified to new adjusted values with RocFall 8 and the proposed algorithm to produce the results shown above, which match the CRSP 4 results.
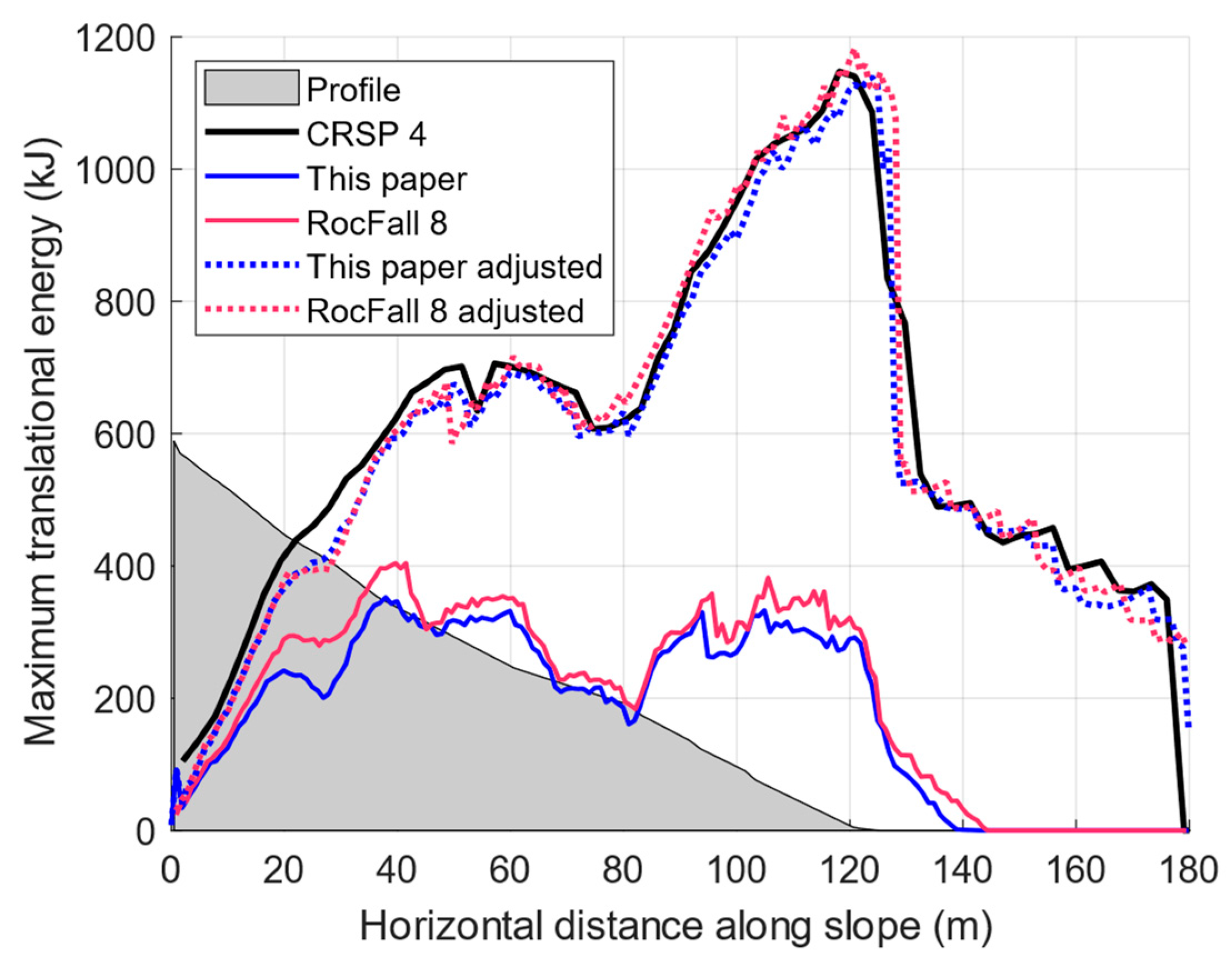
Figure 21.
Distribution of the simulated maximum translational kinetic energy obtained along the Rifle rockfall test site.
Figure 21.
Distribution of the simulated maximum translational kinetic energy obtained along the Rifle rockfall test site.
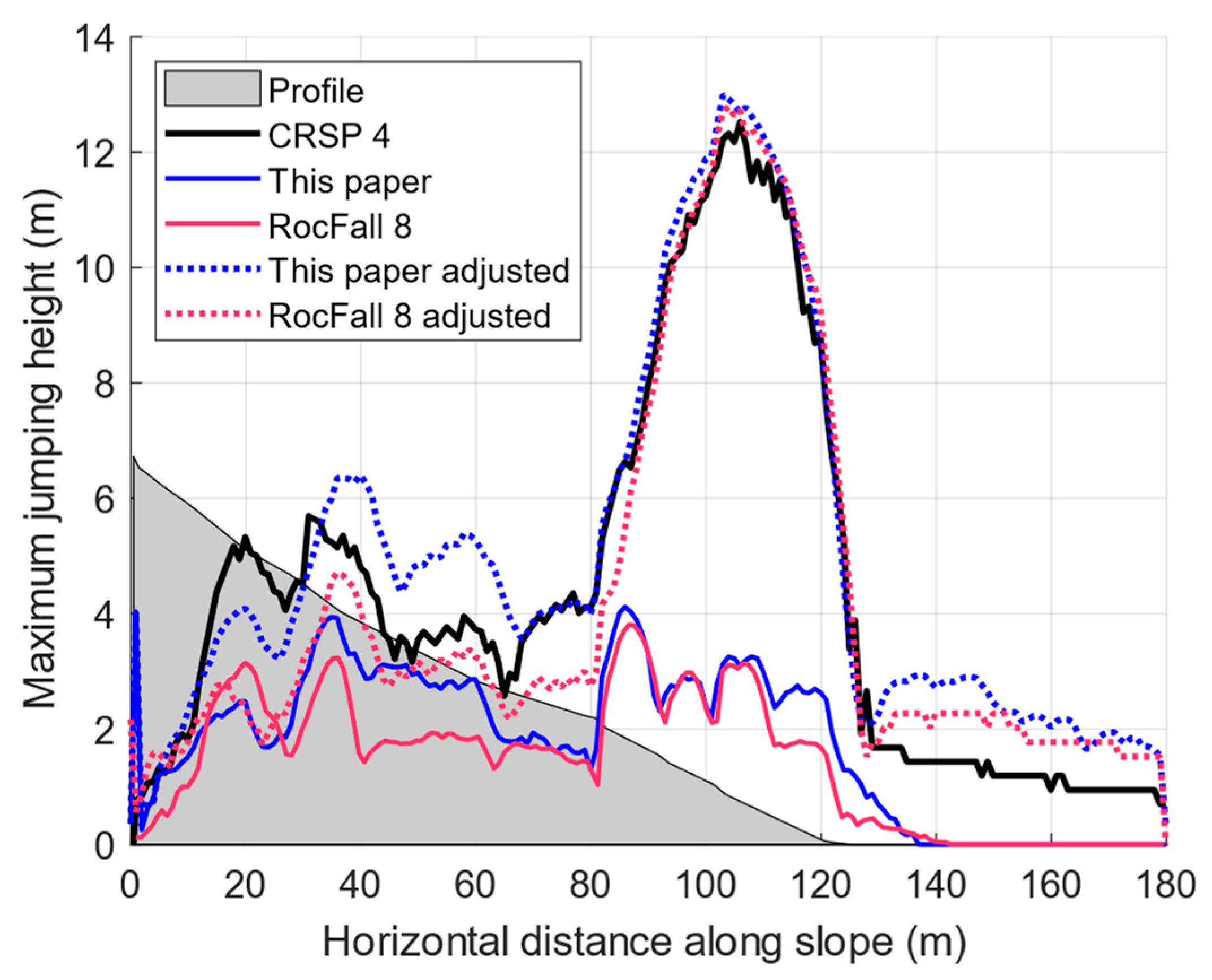
Figure 22.
Distribution of the simulated maximum jumping (bouncing) heights obtained along the Rifle rockfall test site. To correspond to the lumped mass results, the trajectories simulated with the proposed algorithm that considers the size of the rock were shifted down by ½ d1.
Figure 22.
Distribution of the simulated maximum jumping (bouncing) heights obtained along the Rifle rockfall test site. To correspond to the lumped mass results, the trajectories simulated with the proposed algorithm that considers the size of the rock were shifted down by ½ d1.
Figure 23.
Detected impacts against the tree stems for the simulation with the proposed algorithm seen in 3D and from above. The red points are located at the center of mass of the rock at the impact, and their distances from the center of the stems at a height of 1.3 m, thus corresponding to ½ (DBH + d1) based on Equation (1).
Figure 23.
Detected impacts against the tree stems for the simulation with the proposed algorithm seen in 3D and from above. The red points are located at the center of mass of the rock at the impact, and their distances from the center of the stems at a height of 1.3 m, thus corresponding to ½ (DBH + d1) based on Equation (1).
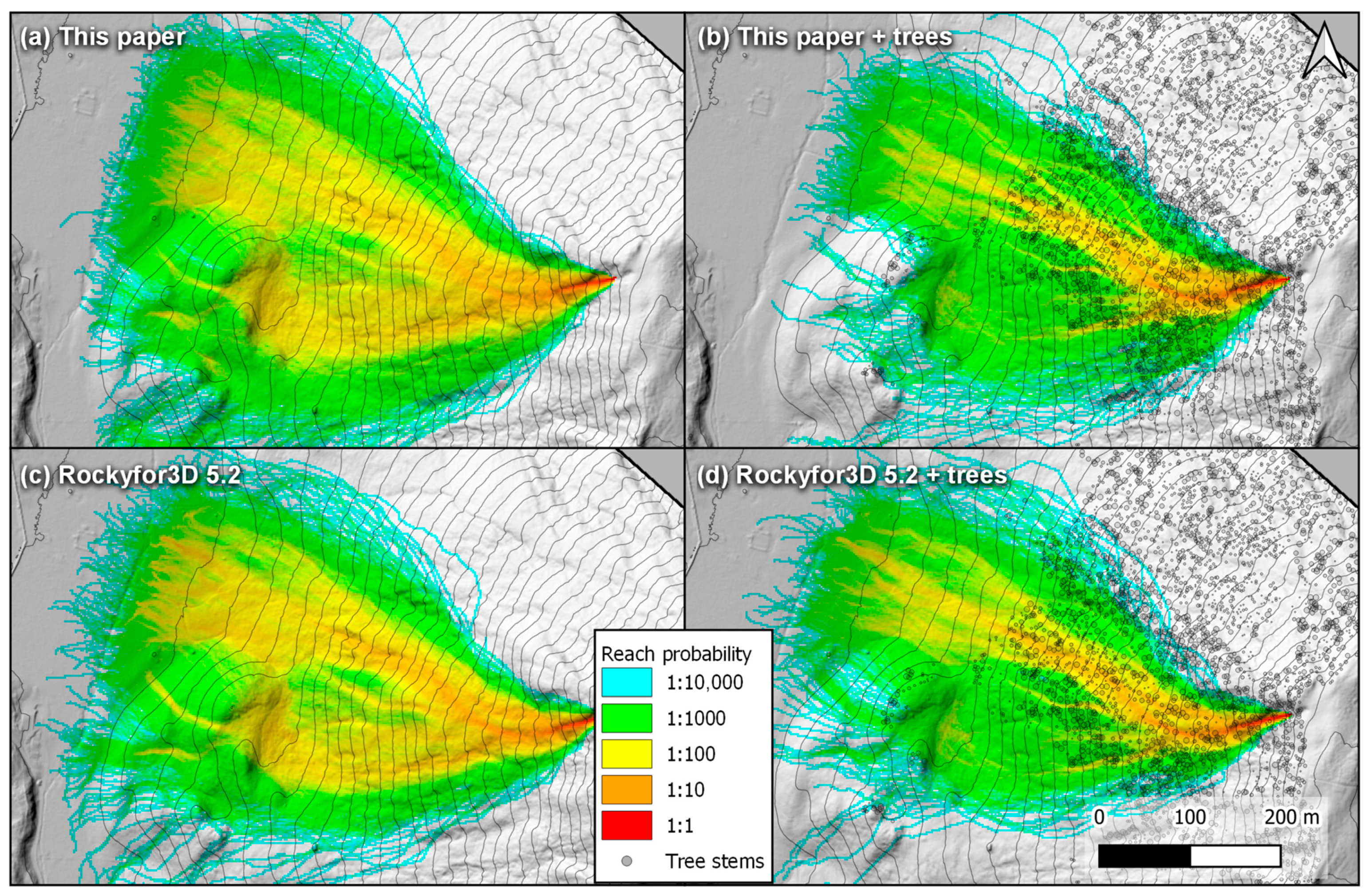
Figure 24.
Results for the comparison on the alpine slope near La Verda–Rougemont in Switzerland. The left windows (a,c) show the reach probability results from the proposed algorithm compared to those from Rockyfor3D 5.2.15. The right windows (b,d) show the same results, but with tree stems considered. The colors are based on a log10 distribution to show the changes in order of magnitude instead of linearly, which enhances the subtle changes in the low reach probability values. The 10 m contour lines and hill shade base layers are from a 1 m cell size gridded DTM.
Figure 24.
Results for the comparison on the alpine slope near La Verda–Rougemont in Switzerland. The left windows (a,c) show the reach probability results from the proposed algorithm compared to those from Rockyfor3D 5.2.15. The right windows (b,d) show the same results, but with tree stems considered. The colors are based on a log10 distribution to show the changes in order of magnitude instead of linearly, which enhances the subtle changes in the low reach probability values. The 10 m contour lines and hill shade base layers are from a 1 m cell size gridded DTM.
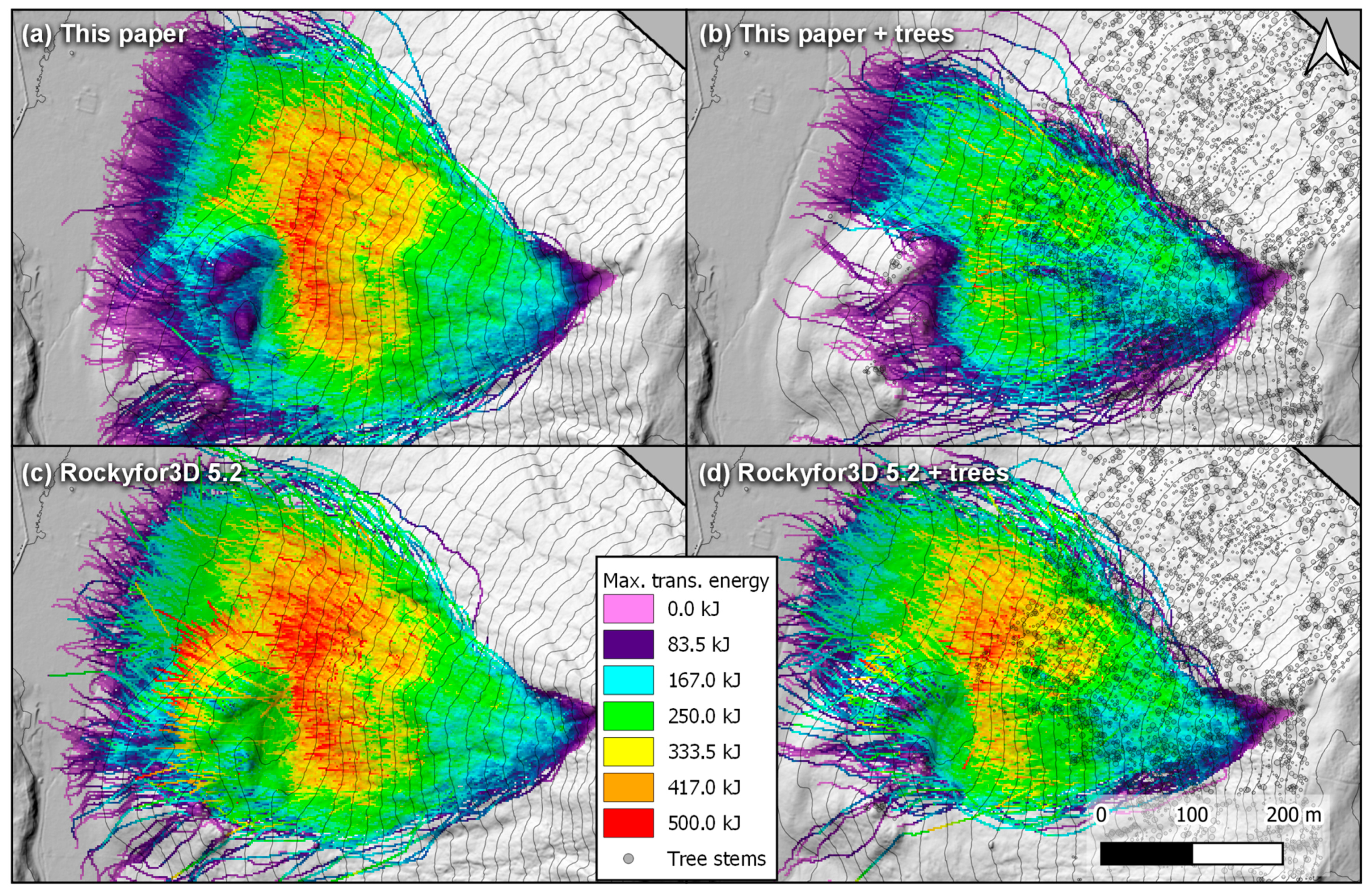
Figure 25.
Results for the comparison on the alpine slope near La Verda–Rougemont in Switzerland. The left windows (a,c) show the maximum translational kinetic energy results from the proposed algorithm compared to those from Rockyfor3D 5.2.15. The right windows (b,d) show the same results but consider the tree stems. The 10 m contour lines and hill shade base layers are from a 1 m cell size gridded DTM.
Figure 25.
Results for the comparison on the alpine slope near La Verda–Rougemont in Switzerland. The left windows (a,c) show the maximum translational kinetic energy results from the proposed algorithm compared to those from Rockyfor3D 5.2.15. The right windows (b,d) show the same results but consider the tree stems. The 10 m contour lines and hill shade base layers are from a 1 m cell size gridded DTM.
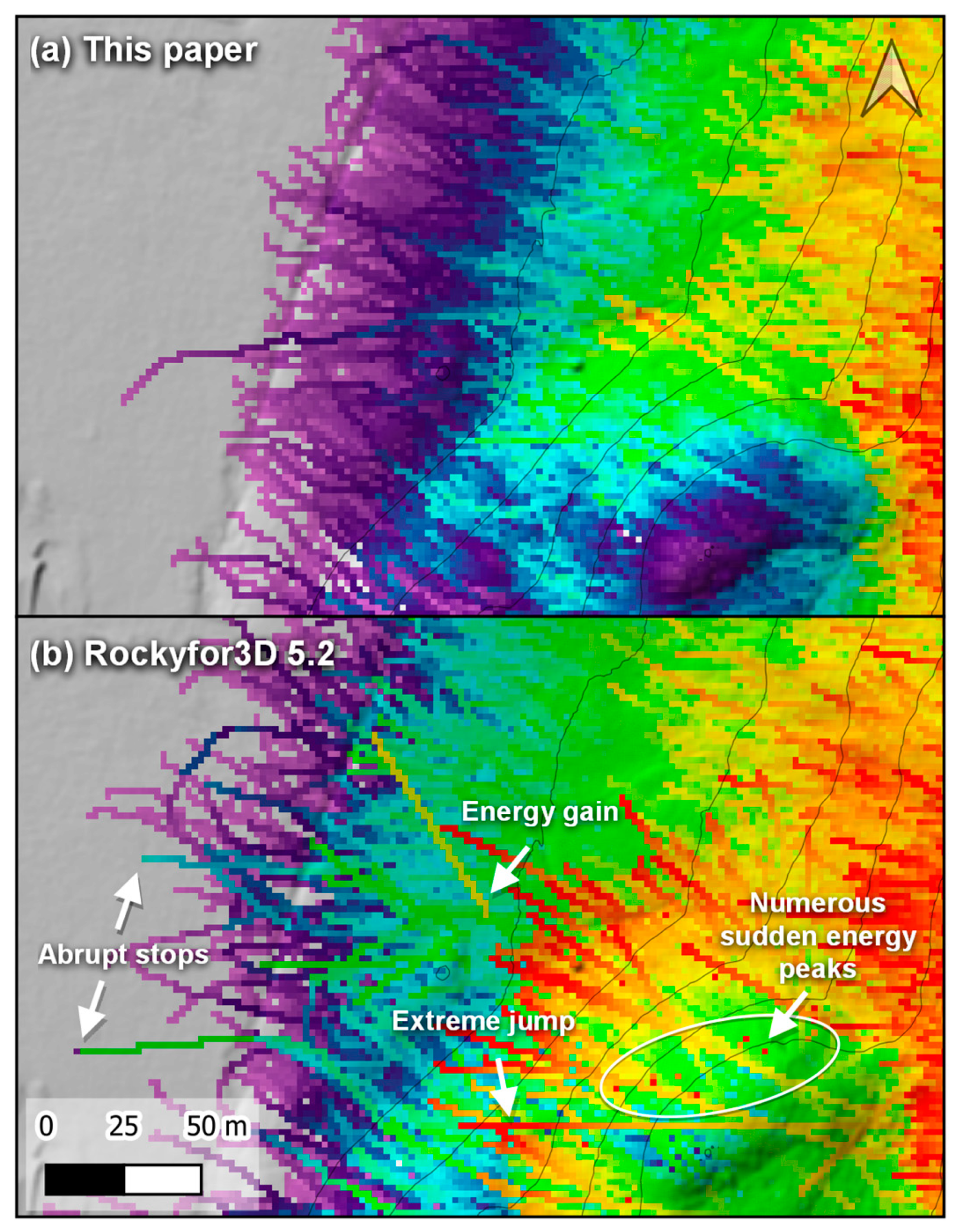
Figure 26.
Enlarged view of the simulated maximum translational kinetic energy close to the foot of the slope. The same scale as in the previous figure is used, with energies from 0 to 500 kJ shown in rainbow colors from violet to red.
Figure 26.
Enlarged view of the simulated maximum translational kinetic energy close to the foot of the slope. The same scale as in the previous figure is used, with energies from 0 to 500 kJ shown in rainbow colors from violet to red.
Table 1.
Probabilities for deviation occurring after an impact against a stem (after Dorren et al. [
49]).
Table 1.
Probabilities for deviation occurring after an impact against a stem (after Dorren et al. [
49]).
| Impact Configuration | Probability of Deviation |
|---|
| Frontal | |
|
|
| Lateral | |
|
|
| Scratch | |
|
|
Table 2.
Characteristics of the sites for the rockfall simulations.
Table 2.
Characteristics of the sites for the rockfall simulations.
| Parameters | Site 1a | Site 1b | Site 1c | Site 1d | Site 2 | Site 3 |
|---|
| Rn | 0.35 | 0.35 | 0.35 | 0.35 | 0.35 | 0.32 |
| Rn variability (Std Dev) | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| Rt | 0.85 | 0.85 | 0.85 | 0.85 | 0.85 | 0.83 |
| Rt variability (Std Dev) | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| d1 (m) | 0.3 | 1 | 3 | 10 | 1.9 | 1.9 |
| d2 (m) | 0.3 | 1 | 3 | 10 | 1.3 | 1.3 |
| d3 (m) | 0.3 | 1 | 3 | 10 | 0.9 | 0.9 |
| Mass (kg) | 38 | 1414 | 38 × 103 | 1414 × 103 | 3143 | 3143 |
| Point spacing (m) | 0.02 | 0.02 | 0.02 | 0.02 | 0.25 | 0.46 |
| Number of points (·106) | 10 | 10 | 10 | 10 | 1.8 | 1.9 |
Table 3.
Damping coefficients and artificial roughnesses used for the Rifle rockfall test site. The first 13 values are from Jones et al. [
17]. They were replaced by the adjusted parameters shown on the bottom line for a second round of simulations with RocFall 8 and the proposed algorithm to obtain matching results with CRSP 4.
Table 3.
Damping coefficients and artificial roughnesses used for the Rifle rockfall test site. The first 13 values are from Jones et al. [
17]. They were replaced by the adjusted parameters shown on the bottom line for a second round of simulations with RocFall 8 and the proposed algorithm to obtain matching results with CRSP 4.
| Cell Number | | θmax | Rn | Rt |
|---|
| - | (m) | (°) | - | - |
|---|
| 1 | 0.12 | 11.3 | 0.25 | 0.82 |
| 2 | 0.18 | 16.7 | 0.32 | 0.84 |
| 3 | 0.24 | 21.8 | 0.32 | 0.84 |
| 4 | 0.61 | 45.0 | 0.32 | 0.84 |
| 5 | 0.24 | 21.8 | 0.3 | 0.84 |
| 6 | 0.24 | 21.8 | 0.3 | 0.84 |
| 7 | 0.24 | 21.8 | 0.3 | 0.83 |
| 8 | 0.30 | 26.6 | 0.33 | 0.82 |
| 9 | 0.24 | 21.8 | 0.33 | 0.82 |
| 10 | 0.43 | 35.0 | 0.34 | 0.84 |
| 11 | 0.37 | 31.0 | 0.34 | 0.84 |
| 12 | 0.24 | 21.8 | 0.34 | 0.84 |
| 13 | 0.12 | 11.3 | 0.34 | 0.85 |
| Adjusted | 0.18 | 16.7 | 0.28 | 0.98 |
Table 4.
Damping parameters based on slope thresholds used for the alpine slope near La Verda–Rougemont in Switzerland.
Table 4.
Damping parameters based on slope thresholds used for the alpine slope near La Verda–Rougemont in Switzerland.
| Slope | Soil Type | Rg70 | Rg20 | Rg10 |
|---|
| (°) | - | (m) | (m) | (m) |
|---|
| 0–2 | 3 | 0.03 | 0.03 | 0.03 |
| 2–7 | 4 | 0.05 | 0.05 | 0.10 |
| 7–25 | 4 | 0.05 | 0.10 | 0.20 |
| 25–45 | 5 | 0.00 | 0.05 | 0.10 |
| 45–90 | 6 | 0.00 | 0.00 | 0.00 |
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}