


Tunnelling with Full-Face Shielded Machines: A 3D Numerical Analysis of an Earth Pressure Balance (EPB) Excavation Sequence Using the Finite Element Method (FEM)

 ,
, 
Abstract
:1. Introduction
2. Background
2.1. Tunnelling in Soft Ground
2.2. EPBM Tunnelling
2.2.1. Face Pressure
2.2.2. Segmental Lining
2.3. Modelling EPBM Tunnelling
2.3.1. Modelling the Face Pressure
2.3.2. Modelling the Annular Grout
2.3.3. Modelling the Segmental Lining
2.3.4. Modelling the EPBM Shield
2.4. Modelling the Ground Conditions in Geotechnical Engineering for EPBM
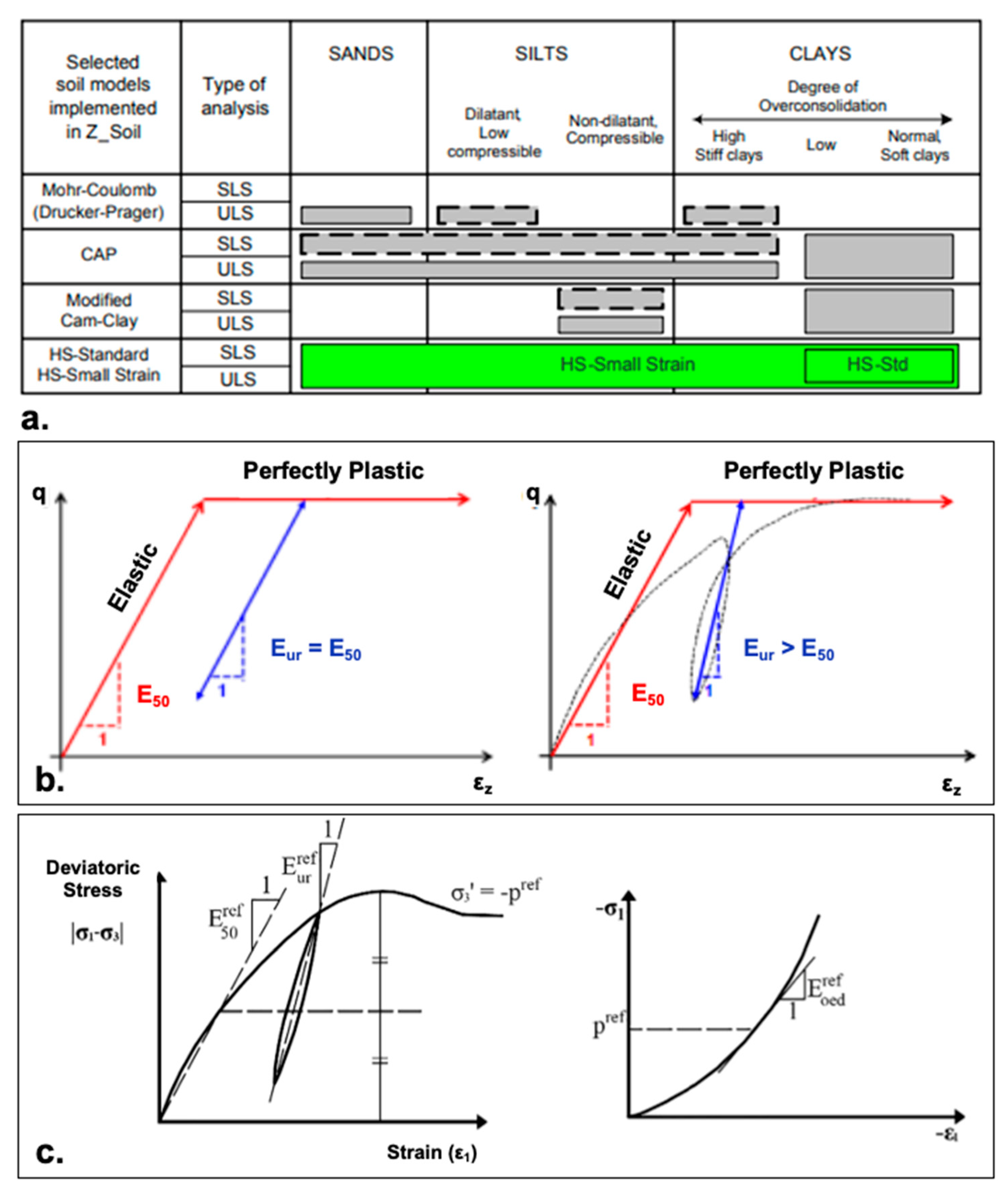
2.4.1. Mohr–Coulomb
2.4.2. Hardening Soil
2.4.3. Hardening Soil with Small Strain
3. Site Characterisation
Site Description, Geological Setting and Ground Model
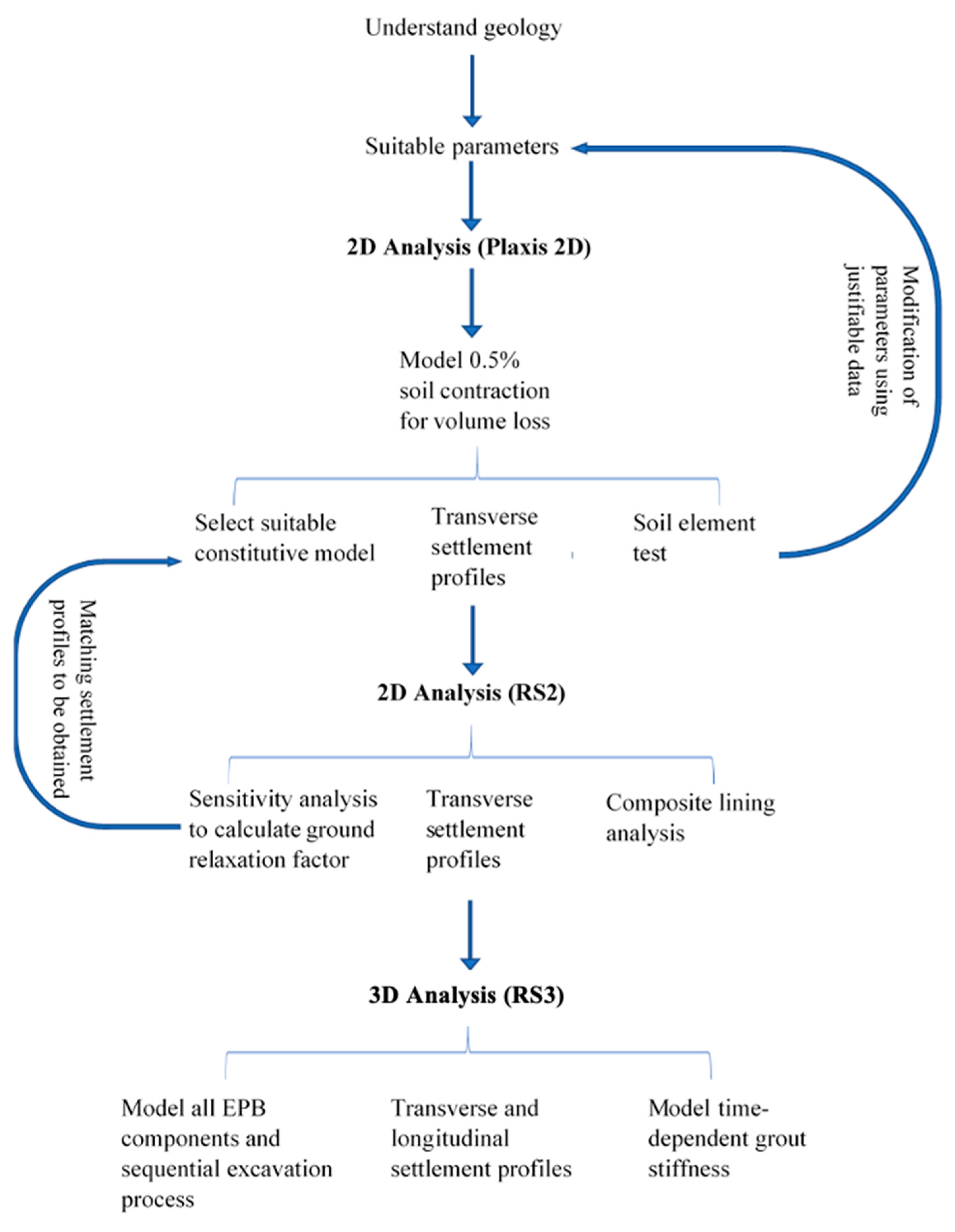
4. Numerical Analyses
4.1. Model Input Parameters
4.1.1. Mohr–Coulomb
4.1.2. Hardening Soil and Hardening Soil with Small Strain
4.1.3. Other Parameters
4.2. Model Set-Up for 2D Analysis
4.2.1. Geometry Mesh and Boundary Conditions in 2D
Modelling EPBM Sequence
- Segmental Lining and Shield
- Grout pressure
- Volume loss
- Contraction method
- Ground Relaxation Method
4.3. Model Set-Up for 3D Analysis
4.3.1. Geometry Mesh and Boundary Conditions in 3D
- Firstly, the primary stage comprises ‘fixed’ displacements in the XY directions so that the virgin stress field is initiated with no excavations, with only the gravity loading activated. The displacements are also set to zero (free displacements) by the next stage. The latter is crucial because it ensures that the whole model is initially consolidated under gravity and that the settlement is only specified during the excavation.
- In the second stage, the excavation (nulling) sections are activated.
- The third stage and all proceeding stages follow the excavation sequence (Table 8).
Modelling EPBM Sequence
- Sequential excavation
- Segmental lining, shield and tail void
- Tail grout and time-dependent hardening stiffness
- Face pressure
5. Numerical Results
5.1. PLAXIS2D and RS2 Analysis
5.1.1. RS2 Relaxation Analysis
- Mohr–Coulomb (M-C) model
- Hardening Soil Standard (HS) model
- Hardening Soil with Small Strain (HSS) model
5.1.2. Lining Parametric Analysis
5.2. RS3 Analysis
- Mohr–Coulomb (M-C) model
- Hardening Soil Standard (HS) model
- Hardening Soil with Small Strain (HSS) model
6. Discussion and Limitations
6.1. Two-Dimensional Analysis
6.2. Three-Dimensional Analysis
7. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maidl, B.; Herrenknecht, M.; Maidl, U.; Wehrmeyer, G.; Sturge, D. Mechanised Shield Tunnelling; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Paraskevopoulou, C.; Cornaro, A.; Admiraal, H.; Paraskevopoulou, A. Underground space and urban sustainability: An integrated approach to the city of the future. In Proceedings of the International Conference on Changing Cities IV: Spatial, Design, Landscape & Socio-Economic Dimensions, Chania, Greece, 24–29 June 2019; University of Thessaly: Volos, Greece, 2019. ISBN 978-960-99226-9-2. [Google Scholar]
- Paraskevopoulou, A.; Cornaro, A.; Paraskevopoulou, C. Underground Space and Street Art towards resilient urban environments. In Proceedings of the International Conference on Changing Cities IV: “Making our Cities Resilient in times of Pandemics”, Corfu, Greece, 20–25 June 2022. [Google Scholar]
- Carranza-Torres, C.; Rysdahl, B.; Kasim, M. 2013. On the elastic analysis of a circular lined tunnel considering the delayed installation of the support. Int. J. Rock Mech. Min. Sci. 2013, 61, 57–85. [Google Scholar] [CrossRef]
- Kavvadas, M.; Litsas, D.; Vazaios, I.; Fortsakis, P. Development of a 3D finite element model for shield EPB tunnelling. Tunn. Undergr. Space Technol. 2017, 65, 22–34. [Google Scholar] [CrossRef]
- Deng, H.-S.; Fu, H.-L.; Yue, S.; Huang, Z.; Zhao, Y.-Y. Ground loss model for analyzing shield tunneling-induced surface settlement along curve sections. Tunn. Undergr. Space Technol. 2022, 119, 104250. [Google Scholar] [CrossRef]
- Lou, P.; Li, Y.; Xiao, H.; Zhang, Z.; Lu, S. Influence of Small Radius Curve Shield Tunneling on Settlement of Ground Surface and Mechanical Properties of Surrounding Rock and Segment. Appl. Sci. 2022, 12, 9119. [Google Scholar] [CrossRef]
- Paraskevopoulou, C.; Benardos, A. Assessing the construction cost of tunnel projects. Tunn. Undergr. Space Technol. J. 2013, 38, 497–505. [Google Scholar] [CrossRef]
- Benardos, A.; Paraskevopoulou, C.; Diederichs, M. Assessing and benchmarking the construction cost of tunnels. In Proceedings of the 66th Canadian Geotechnical Conference, GeoMontreal on Geoscience for Sustainability, Montreal, QC, Canada, 29 September–3 October 2013. [Google Scholar]
- Paraskevopoulou, C.; Dallavalle, M.; Konstantis, S.; Spyridis, P.; Benardos, A. 2022. Assessing the Failure Potential of Tunnels and the Impacts on Cost Overruns and Project Delays. Tunn. Undergr. Space Technol. J. 2022, 123, 104443. [Google Scholar] [CrossRef]
- Rocscience.com. Learning Resources. 2020. Available online: https://www.rocscience.com/learning (accessed on 16 July 2020).
- PLAXIS 2018.1 Scientific Manual. Bentley, Advancing Infrastructure. Available online: https://www.cisec.cn/support/knowledgeBase/files/9C246B743FC5BC8C93BA3289873AC1B3636991439136189558.pdf (accessed on 9 August 2023).
- Shah, R.; Zhao, C.; Lavasan, A.A.; Peila, D.; Schanz, T.; Lucarelli, A. Influencing factors affecting the numerical simulation of the mechanized tunnel excavation using FEM and FDM techniques. Proceedings of EUROTUN 2017, IV International Conference on Computational Methods in Tunnelling and Subsurface Engineering, Innsbruck, Austria, 18–20 April 2017. [Google Scholar]
- Kasper, T.; Meschke, G. A numerical study of the effect of soil and grout material properties and cover depth in shield tunnelling. Comput. Geotech. 2006, 33, 234–247. [Google Scholar] [CrossRef]
- Clough, W.; Leca, E. EPB shield tunneling in mixed face conditions. ASCE J. Geotech. Geoenviron. Eng. 1993, 119, 1640–1656. [Google Scholar] [CrossRef]
- Herrenknecht, 2000. Available online: https://www.herrenknecht.com/en/products/productdetail/epb-shield/ (accessed on 10 July 2020).
- Ahmed, M.; Iskander, M. Evaluation of tunnel face stability by transparent soil models. Tunn. Undergr. Space Technol. 2012, 27, 101–110. [Google Scholar] [CrossRef]
- Koyama, Y. Present Status and technology of shield tunnelling method in Japan. Tunn. Undergr. Space Technol. 2003, 18, 145–159. [Google Scholar] [CrossRef]
- Lambrughi, A.; Medina, L.; Castellanza, R. Development and validation of a 3D numerical model for TBM-EPB mechanized excavations. Comput. Geotech. 2012, 40, 97–113. [Google Scholar] [CrossRef]
- Litsas, D.; Sitarenios, P.; Kavvadas, M. Influence of geometrical and operational machine characteristics on ground movements during EPB tunnelling. In Proceedings of the EUROTUN 2017, IV International Conference on Computational Methods in Tunnelling and Subsurface Engineering, Innsbruck, Austria, 18–20 April 2017. [Google Scholar]
- Koyama, Y.; Okano, N.; Shimizu, M.; Fujiki, I.; Yoneshima, K. In-situ measurement and consideration on shield tunnel in diluvium deposit. Proc. Tunn. Eng. 1995, 5, 385–390. (In Japanese) [Google Scholar]
- Obrzud, R.; Truty, A. The Hardening Soil Model—A Practical Guidebook; Z Soil.PC 100701 Report; Zace Services Ltd.: Preverenges, Switzerland, 2018. [Google Scholar]
- Tjie-Liong, G. Common Mistakes on the Application of PLAXIS2D in Analyzing Excavation Problems. Int. J. Appl. Eng. Res. 2014, 9, 8291–8311. [Google Scholar]
- Gasparre, A.; Nishimura, S.; Minh, N.; Coop, M.; Jardine, R. The stiffness of natural London Clay. Géotechnique 2007, 57, 33–47. [Google Scholar] [CrossRef]
- Hight, D.; Gasparre, A.; Nishimura, S.; Minh, N.; Jardine, R.; Coop, M. Characteristics of the London Clay from the Terminal 5 site at Heathrow Airport. Géotechnique 2007, 57, 3–18. [Google Scholar] [CrossRef]
- Schanz, T.; Vermeer, P.; Bonier, P. (Eds.) Formulation and verification of the Hardening Soil model. In Beyond 2000 in Computational Geotechnics; A.A Balkema, Rotterdam: Rotterdam, The Netherlands, 1999. [Google Scholar]
- Duncan, J.M.; Chang, C.Y. Nonlinear analysis of stress and strain in soils. J. Soil Mech. Found. Div. 1970, 96, 1629–1653. [Google Scholar] [CrossRef]
- Zakhem, A.; El Naggar, H. Effect of the Constitutive Material Model Employed on Predictions of the Behaviour of Earth Pressure Balance (EPB) Shield-Driven Tunnels. Transp. Geotech. 2019, 21, 100264. [Google Scholar] [CrossRef]
- Le, B.T.; Nguyen, T.T.T.; Divall, S.; Davies, M.C.R. A study on large volume losses induced by EBPM tunnelling in sandy soils. Tunn. Undergr. Space Technol. 2023, 132, 104847. [Google Scholar] [CrossRef]
- Benz, T. Small-Strain Stiffness of Soils and Its Numerical Consequences. Ph.D. Thesis, Universitat Sttutgart, Houston, TX, USA, 2007. [Google Scholar]
- Vakili, K.; Barciaga, T.; Lavasan, A.; Schanz, T. A practical approach to constitutive models for the analysis of geotechnical problems. In Proceedings of the 3rd International Symposium on Computational Geomechanics (ComGeo III), Krakow, Poland, 21–23 August 2013; pp. 738–749. [Google Scholar]
- Hardin, B.O.; Drnevich, V. Shear modulus and damping in soils: Design equations and curves. Geotech. Spec. Publ. 1972, 98, 667–692. [Google Scholar] [CrossRef]
- Sumbler, M.G. British Regional Geology: London and the Thames Valley, 4th ed.; British Geological Survey: London, UK, 1996. [Google Scholar]
- Royse, K.; de Freitas, M.; Burgess, W.; Cosgrove, J.; Ghail, R.; Gibbard, P.; King, C.; Lawrence, U.; Mortimore, R.; Owen, H.; et al. Geology of London, UK. Proc. Geol. Assoc. 2012, 123, 22–45. [Google Scholar] [CrossRef] [Green Version]
- Foster, J.; Paraskevopoulou, C.; Miller, R. Numerical Modelling and Sensitivity Analysis of the Interaction between Thameslink Rail Tunnels at King’s Cross and the Adjacent and Overlying Construction of Building S1. Geomech. Geoengin. Int. J. 2021, 16, 20–43. [Google Scholar] [CrossRef]
- O’Shea, O.; Paraskevopoulou, C.; Miller, R. Investigation of tunnel movement of the Thameslink Tunnels below Site S3 of King’s Cross Zone development. Geomech. Geoengin. Int. J. 2022, 7, 689–711. [Google Scholar] [CrossRef]
- Mayne, P.; Kulhawy, F. Ko−OCR relationship in soils. J. Geotech. Eng. Div. 1982, 108, 851–872. [Google Scholar] [CrossRef]
- Moller, S. Tunnel Induced Settlements and Structural Forces in Linings. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2006. [Google Scholar]
- Sitarenios, P.; Litsas, D.; Kavvadas, M. The interplay of face support pressure and soil permeability on face stability in EPB tunneling. In Proceedings of the World Tunnel Congress (WTC), San Fransisco, CA, USA, 22–28 April 2016. [Google Scholar]
- Zhao, C.; Lavasan Alimardani, A.; Barciaga, T.; Zarev, V.; Datcheva, M.; Schanz, T. Model validation and calibration via back analysis for mechanized tunnel simulations—The Western Scheldt tunnel case. Comput. Geotech. 2015, 69, 601–614. [Google Scholar] [CrossRef]
- Bryne, L.; Ansell, A.; Holmgren, J. Laboratory testing of early age bond strength of shotcrete on hard rock. Tunn. Undergr. Space Technol. 2014, 41, 113–119. [Google Scholar] [CrossRef]
- Borghi, F. Soil Conditioning for Pipe-Jacking and Tunnelling; University of Cambridge: Cambridge, UK, 2006. [Google Scholar]
- Wongsaroj, J.; Borghi, F.; Mair, R. Effect of TBM driving parameters on ground surface movements: Channel Tunnel Rail Link Contract 220. Geotech. Asp. Undergr. Constr. Soft Ground 2006, 5, 335–341. [Google Scholar]
- Vermeer, P.A.; Brinkgreve, R. PLAXIS Version 5 Manual; Balkema, A.A., Ed.; Rotterdam: Rotterdam, The Netherlands, 1993. [Google Scholar]
- Khalid, M.; Kikumoto, M.; Cui, Y.; Kishida, K. The role of dilatancy in shallow overburden tunneling. Undergr. Space 2019, 4, 181–200. [Google Scholar] [CrossRef]
- Panet, M.; Guenot, A. Analysis of convergence behind theface of a tunnel. In Proceedings of the International Symposium, Tunnelling-82, Brighton, UK, 7–11 June 1982; pp. 187–204. [Google Scholar]
- Chern, J.C.; Shiao, F.Y.; Yu, C.W. An empirical safety criterion for tunnel construction. In Proceedings of the Regional Symposium on Sedimentary Rock Engineering, Taipei, Taiwan, 20–22 November 1998; pp. 222–227. [Google Scholar]
- Paraskevopoulou, C.; Diederichs, M.S.; Perras, M. Time-dependent rock masses and implications associated with tunnelling. In Proceedings of the EUROTUN 2017, IV International Conference on Computational Methods in Tunnelling and Subsurface Engineering, Innsbruck, Austria, 18–20 April 2017. [Google Scholar]
- Paraskevopoulou, C.; Diederichs, M. Analysis of time-dependent deformation in tunnels using the Convergence-Confinement Method. Tunn. Undergr. Space Technol. J. 2018, 71, 62–80. [Google Scholar] [CrossRef]
- Innocente, J.; Paraskevopoulou, C.; Diederichs, M.S. Estimating the long-term strength and time-to-failure of brittle rocks laboratory testing. Int. J. Rock Mech. Min. Sci. J. 2021, 147, 104900. [Google Scholar] [CrossRef]
- Innocente, J.; Paraskevopoulou, C.; Diederichs, M.S. Time-Dependent Model for Brittle Rocks Considering the Long-Term Strength Determined from Lab Data. Mining 2022, 2, 463–486. [Google Scholar] [CrossRef]
- Abaqus. ABAQUS/Standard Analysis User’s Manual; USA, 2011. Available online: http://130.149.89.49:2080/v6.11/pdf_books/CAE.pdf (accessed on 9 August 2023).
- Bilotta, E.; Russo, G. Internal Forces Arising in the Segmental Lining of an Earth Pressure Balance-Bored Tunnel. J. Geotech. Geoenviron. Eng. 2013, 139, 1765–1780. [Google Scholar] [CrossRef]
- Lee, K.; Ji, H.; Shen, C.; Liu, J.; Bai, T. Ground response to the construction of Shanghai metro tunnel-line 2. Soils Found. 1999, 39, 113–134. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thewes, M.; Budach, C. Grouting of the annular gap in shield tunnelling—An important factor for minimisation of settlements and production performance. In Proceedings of the 35th ITA-AITES, World Tunnel Congress, Budapest, Syria, 23–28 May 2009. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Made Ground (M-C) | London Clay (M-C) | |||||||
|---|---|---|---|---|---|---|---|---|
| General Properties | γDRY (17 kN/m3) | γSAT (19 kN/m3) | Drained | General Properties | γDRY (18 kN/m3) | γSAT (20 kN/m3) | Undrained (A) K = 1.95 × 10−5 | |
| Strength | Stiffness | Strength | Stiffness | |||||
| Parameters | Value | Parameters | Value | Parameters | Value | Parameters | Value | |
| φ | 30° | E | 10,000 | φ | 23° | 100,000 | ||
| c | 0 kPa | ν (nu) | 0.2 | c | 5 kPa | 0.2 | ||
| Interface | Initial | Interface | Initial | |||||
| Fully permeable | RINTER—rigid (1) | K0—0.5–1.2 | Semi-permeable | RINTER—rigid (0.7) | K0—0.609–1.2 | |||
| RTD (M-C) | Lambeth group (M-C) | |||||||
| General Properties | γDRY (17 kN/m3) | γSAT (19 kN/m3) | Drained | General Properties | γDRY (17 kN/m3) | γSAT (19 kN/m3) | Drained | |
| Strength | Stiffness | Strength | Stiffness | |||||
| Parameters | Value | Parameters | Value | Parameters | Value | Parameters | Value | |
| φ | 30° | E | 25,000 * | φ | 23° | E | 45,000 | |
| c | 0 kPa | ν(nu) | 0.2 | c | 0 kPa | ν (nu) | 0.2 | |
| Interface | Initial | Interface | Initial | |||||
| Fully permeable | RINTER—rigid (1) | K0—0.45–1.2 | Impermeable | RINTER—rigid (1) | K0—0.609–1.2 | |||
| London Clay (HS/HSS) | |||
|---|---|---|---|
| General properties | γDRY (18 kN/m3) | γSAT (20 kN/m3) | Undrained (A) K = 1.95 × 10 −5 |
| Strength | Stiffness | ||
| Parameters | Value | Parameters | Value |
| φ | 23° | 40,000 kPa | |
| c | 5 kPa | 120,000 kPa | |
| OCR stress | 1–15 | 35,000 kPa | |
| M (power) | 0.9 | ||
| Advanced Strength | Advanced Stiffness | ||
| RF (Failure ratio) | 0.9 | v (nu) | 0.2 |
| Tensile strength | 5 kPa * | Pref | 100 kPa |
| K0 | 0.609—1.2 | ||
| Small strain (HSS only) | Interface | ||
| γ0.7 | 3 × 10−4 | RINTER | 0.7 |
| G0 | 162,000 kPa | Interface | Impermeable |
| RS2—additional parameters | |||
| Plimit | 10 kPa * | Dilation angle | 7° |
| Geometrical Components | Dimensions |
|---|---|
| External box | 90 m (width), 55 m (depth) |
| Overburden height | 34.5 m |
| Tunnel diameter | 8 m extrados, internal (7.3 m) |
| Shield/primary lining | 0.35 m thick |
| Secondary lining | 0.25 m thick |
| Grout width | 0.1 m thick |
| Primary Lining | |||
|---|---|---|---|
| PLAXIS2D | RS2 | ||
| Lining width | 0.35 m | Lining width | 0.35 m |
| Poisson’s ratio (v) | 0.2 | Poisson’s ratio (v) | 0.2 |
| EA 1 (in-plane) | 3.60 × 106 kPa | E’ | 3.60 × 106 kPa |
| EA 2 (out-of-plane) | 3.60 × 106 kPa | Unit weight | 24 kN/m3 |
| EI (flexural rigidity) | 2.70 × 104 kPa | ||
| W | 8.4 kN/m3 | ||
| Parameters | Primary Lining | Secondary Lining [41] | Grout after 28 Days [13] | Units |
|---|---|---|---|---|
| Behaviour | Plastic | plastic | Plastic | |
| Unit weight | 24 | 24 | 24 | kN/m3 |
| Modulus of elasticity | 36 | 36 | 1.5–2.5 | GPA |
| Poisson’s ratio | 0.15 | 0.15 | 0.3 | |
| Compressive strength | 45 | 67 | 1.5–2 | MPa |
| Stage | Phase | Construction Steps | Model Steps | Justification/Comments |
|---|---|---|---|---|
 | 1 (Pre-excavation) | - | -Initial stress conditions in equilibrium across all layers -Select ignore undrained behaviour | Visualise original conditions to reference displacement change. |
 | 2 (Excavation) | Excavation | -Reset tunnel displacements to 0 -Deactivate soil unit inside tunnel and set deconfinement of clusters to 100% -Set water conditions to dry in tunnel volume | Deactivating the soil only effects the soil strength and stresses; therefore, setting the water condition to 0 is needed to deactivate the water pressure. A 100% deconfinement means there is zero internal support pressure, which allows for soil convergence. |
 | 3 (Construction) | Lining | -Activate tunnel lining as plate elements with the concrete segment material properties -Activate negative interface | Lining is constructed under the protection of the shield so there is no soil contraction yet. The negative interface creates a soil–structure interaction. |
 | 4 (Construction) | Contraction | -Select all segment plate elements and activate contraction (Cref = 0.5%) | A Cref of 0.5% is acceptable for excavation in London Clay, allowing for stress re-distribution. The liner contraction will be 0.25% because the actual strain to the lining is half of the applied contraction. |
 | 5 (Construction) | Grouting | -Reset displacements to zero is NOT selected -Deactivate lining, interface and contraction -Activate water conditions to user-defined conditions (grout pressure) −387 kPa | This sustains the previous contractions before grouting. The deactivation of plates allows for the grout pressure to transmit from the tunnel axis outwards to the soil interface as an equal pressure distribution. The calculated grout pressure can be exerted to the annular gap in the contraction area. |
 | 6 (Construction) | Final lining | -Do not reset displacements to zero -Set tunnel volume to dry -Re-activate lining plates and interface | This allows for any grout contraction. The effects of the grout pressure on the contraction have already been accounted for. The lining reactivation concludes the final stage. |
| Stage | Phase | Construction Steps | Model Steps | Justification/Comments |
|---|---|---|---|---|
 | 1 (Pre-excavation) | - | Initial stress condition ignores undrained behaviour | Observe initial stable conditions. |
| GR 1 (Po = Pi) | 2 | Excavation | Soil unit inside the tunnel is deactivated at this stage | |
 | 3 (Construction) | Incremental Ground Relaxation | Staged increase in ground relaxation for both the M-C and HS/HSS models based on the sensitivity analysis Decrease in GR of 0.1 per stage for M-C model, with smaller increments of 0.05 for the more sensitive HS/HSS model | RS2 offers the ground relaxation method to simulate volume loss, which is performed in progressive stages with the aim of matching the surface settlement profiles seen in PLAXIS2D. A GR factor will be established, which will produce the same settlement profile seen in PLAXIS2D at a contraction factor of 0.5%. The GR method already takes the grout pressure into account, so there is no added stage for this. |
 | 4 (Construction) | Final Lining | The final lining is activated once sufficient ground relaxation has taken place and negative interface is activated | The final lining will take on a much smaller loading pressure because the ground has been given time to relax, so the lining stability is optimised. |
| Model Components | [20] | [39] | [5] |
|---|---|---|---|
| Constitutive model | Modified Cam-Clay—plastic and Mohr–Coulomb failure (elastic–plastic) | Modified Cam-Clay | Linear elastic–perfectly plastic Mohr–Coulomb failure. |
| Geology | All share similar geological conditions in soft to stiff clayey soils; ground water was assumed at the surface with saturated undrained conditions with low permeabilities (10–8 m/s) | ||
| Geometry | Shallow 10 m D tunnel symmetrical half-model across axis | 8 m D tunnel symmetrical vertical plane aligned across tunnel axis | Tunnel D—10 m; symmetry not used because transverse lining joints were used. |
| Boundaries | Horizontal profile—11D Longitudinal profile—13D (H/D = 1.5); overburden height at 15 m; free surface at top and fixed sides | Horizontal profile—50 m Vertical (depth)—56 m Longitudinal profile—5D (40 m) H/D = 2.5—overburden height (20 m) | H/D = 2—overburden height (20 m). Longitudinal profile—13D. Horizontal profile—11D. |
| Mesh | Adaptive meshing technique (ALE)—resets the deformed peripheral mesh around the face back to its original structure with no interference on the stress–strain field | Dense discretisation around excavation, with coarseness increasing towards the boundaries | |
| EPB shield | Tapered shield for steering gap (4 cm); modelled with appropriate stiffness and weight | Stiff shell elements to signify the shield | |
| Face pressure | The applied pressure varies linearly across the face height, acting as a trapezium pressure distribution; the assumed bulk density of the applied muck was 13 kN/m3 | Supported by a redefined pressure accompanied by one slice of unsupported excavated material (simulates overcut)-trapezoidal support pressure; the assumed bulk density for the muck was 15 kN/m3 | Assumption of linear variation of earth pressure (Ka) with depth using a bulk density of muck equal to 13 kN/m3 and a reference pressure that is approximately equal to 50% of the horizontal stress. |
| Backfilling | Pressurised grout elements modelled as interface elements, which comply with an ‘exponential pressure overclosure’ relationship; annular gap—grout hardening | Modelled using 8-node solid elements. Time hardening grout from Kasper and Meshke, 2006 was used for the proposed curve. The grout injection pressure was varied (100–400 kPa). | |
| Lining | Modelled as continuous shell | Modelled as continuous shell | Focus on segmental lining with inter-plate joints. Analysis on joint interaction and stress at interface using JOINTC, which allows for small rotations and internal stiffness [52]. A staggered configuration aimed to increase stiffness. |
| Lining was modelled as linear–elastic due to lining stresses being minimal [20]. The components are as follows: | |||
| Sequential excavation pattern | 1. Excavation slice denoted as ‘n’, measuring 1 ring length with an advancement of 1.5 m; 2. ‘n + 1’ is the excavated face that receives the direct support pressure; 3. Slice ‘n-7’ is the first ring outside the shield at the rear–soil interaction activated at this point; 4. ‘n-6’ is the next slice to be activated; 5. Stiffness increases gradually from slices ‘n-7’ to ‘n-8’ and go on to replicate the grout hardening process [14]. 6. Advancement rate between 15 and 18 m/day. | ||
| Parameters | TBM Shield | Primary Lining | Grout [13] | Units |
|---|---|---|---|---|
| Behaviour | Elastic | Elastic | Elastic | |
| Unit weight | 24 | 24 | 24 | kN/m3 |
| Modulus of elasticity | 209 | 36 | 0.1–1000 * | MPa |
| Poisson’s ratio | 0.15 | 0.15 | 0.3 | |
| Compressive strength | 40 | 1.5 | MPa | |
| Geometrical components | Dimensions (Symmetry half model) | |||
| External box | 45 m (width), 140 m (length) and 55 m (depth) | |||
| Overburden height | 34.5 m | |||
| Tunnel diameter | 8 m extrados, internal (7.3 m) | |||
| Shield thickness | 0.1 m | |||
| Shield length | 8 m (4 ring lengths) | |||
| Primary lining | 0.35 m thick | |||
| Grout width | 0.1 m thick | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tyrer, J.; Paraskevopoulou, C.; Shah, R.; Miller, R.; Kavvadas, M. Tunnelling with Full-Face Shielded Machines: A 3D Numerical Analysis of an Earth Pressure Balance (EPB) Excavation Sequence Using the Finite Element Method (FEM). Geosciences 2023, 13, 244. https://doi.org/10.3390/geosciences13080244
Tyrer J, Paraskevopoulou C, Shah R, Miller R, Kavvadas M. Tunnelling with Full-Face Shielded Machines: A 3D Numerical Analysis of an Earth Pressure Balance (EPB) Excavation Sequence Using the Finite Element Method (FEM). Geosciences. 2023; 13(8):244. https://doi.org/10.3390/geosciences13080244
Chicago/Turabian StyleTyrer, Jonathan, Chrysothemis Paraskevopoulou, Ravi Shah, Richard Miller, and Michael Kavvadas. 2023. "Tunnelling with Full-Face Shielded Machines: A 3D Numerical Analysis of an Earth Pressure Balance (EPB) Excavation Sequence Using the Finite Element Method (FEM)" Geosciences 13, no. 8: 244. https://doi.org/10.3390/geosciences13080244
APA StyleTyrer, J., Paraskevopoulou, C., Shah, R., Miller, R., & Kavvadas, M. (2023). Tunnelling with Full-Face Shielded Machines: A 3D Numerical Analysis of an Earth Pressure Balance (EPB) Excavation Sequence Using the Finite Element Method (FEM). Geosciences, 13(8), 244. https://doi.org/10.3390/geosciences13080244