

Real-Time Automated Geosteering Interpretation Combining Log Interpretation and 3D Horizon Tracking

 ,
,
Abstract
:1. Introduction
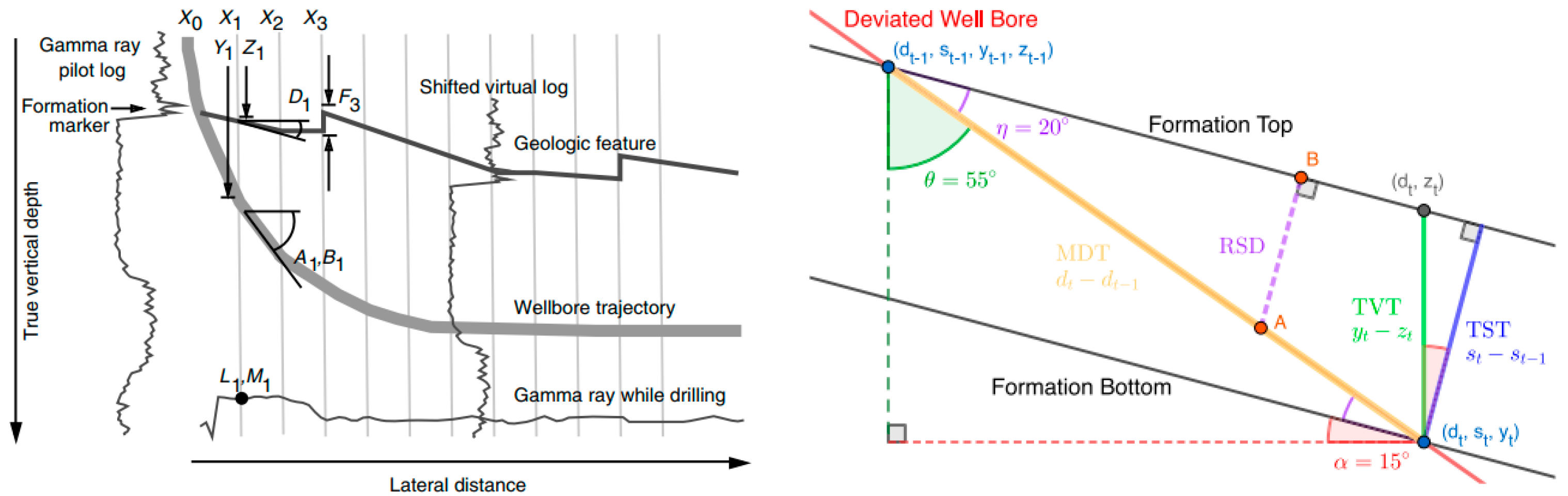
2. Bayesian Well-Log Interpretation
3. Horizon Auto-Tracking
4. Methods
5. Test Cases and Results
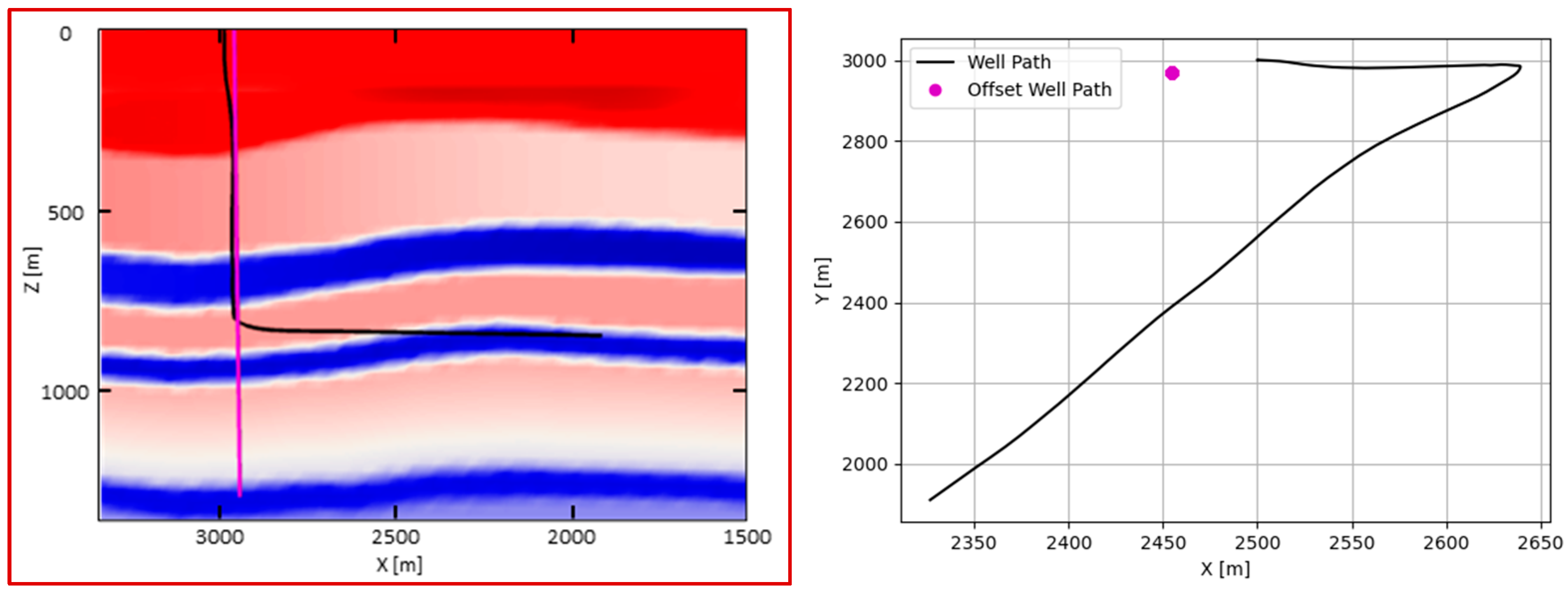
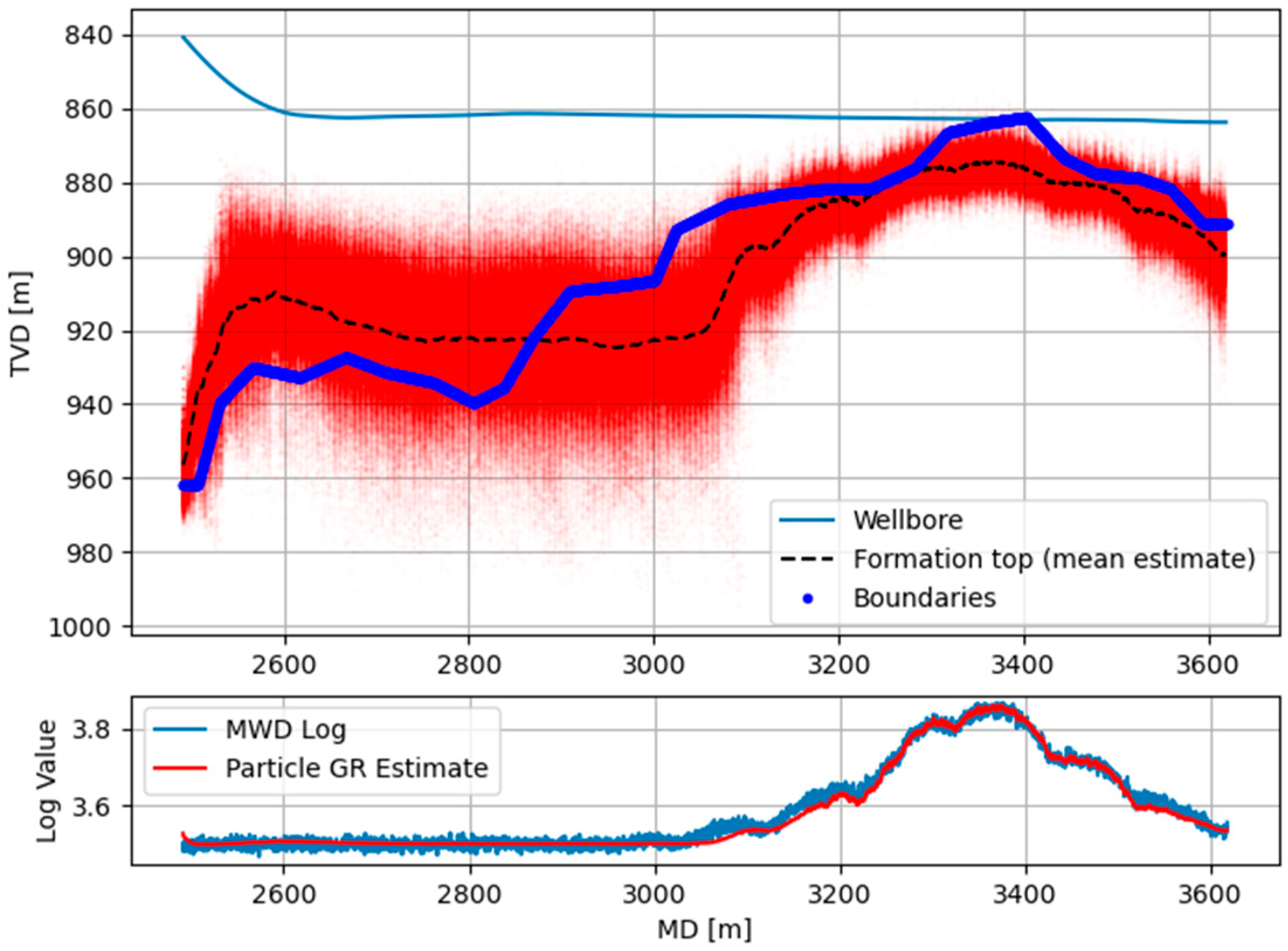
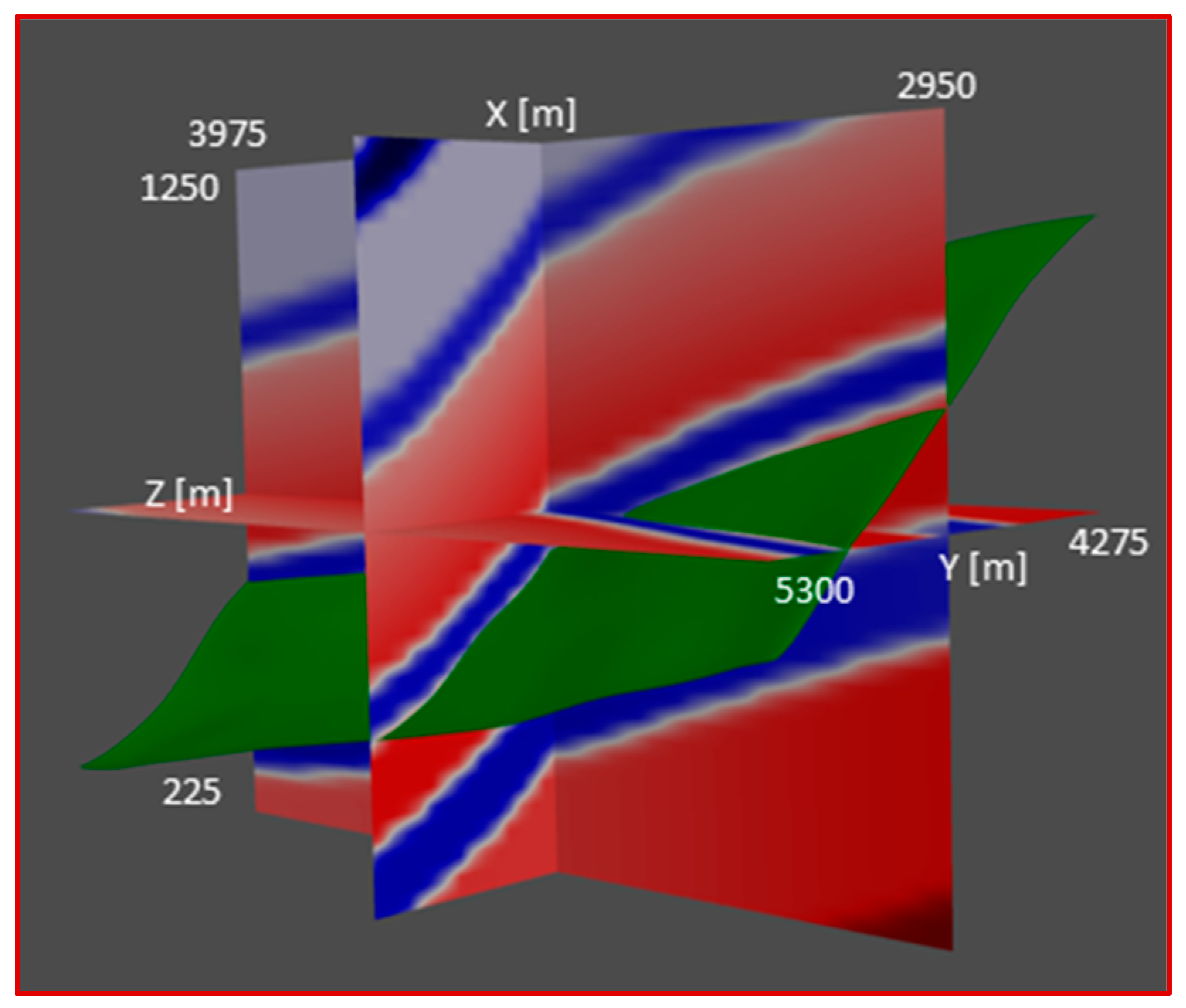
5.1. Synthetic Test Case
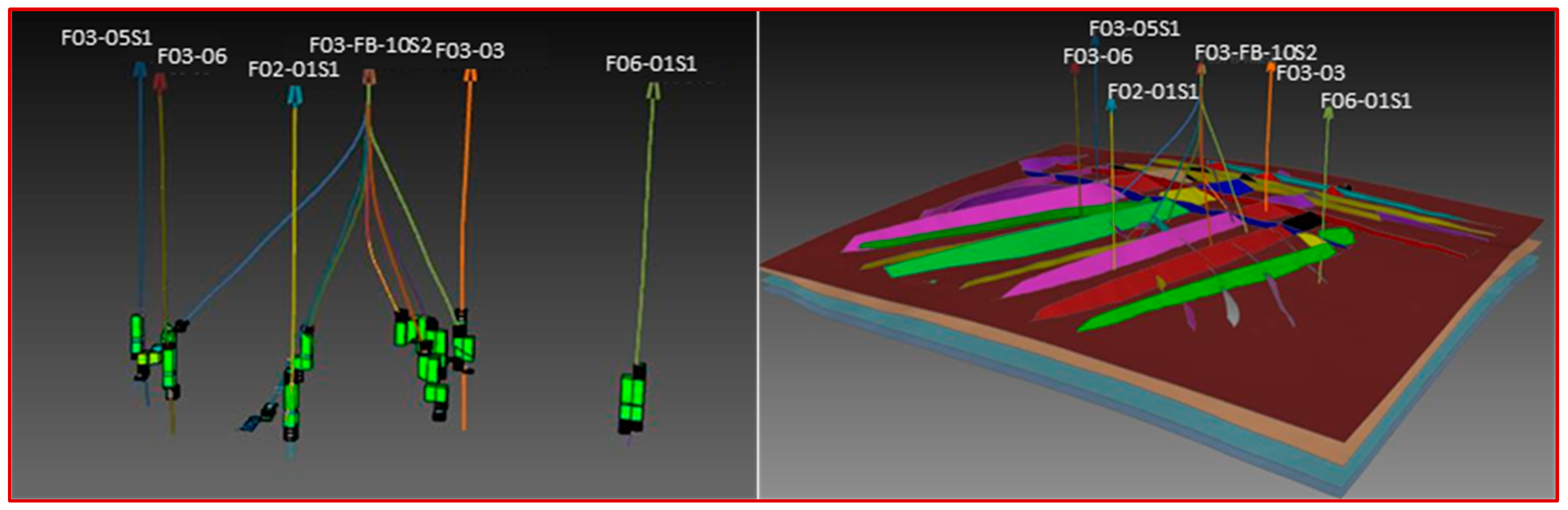
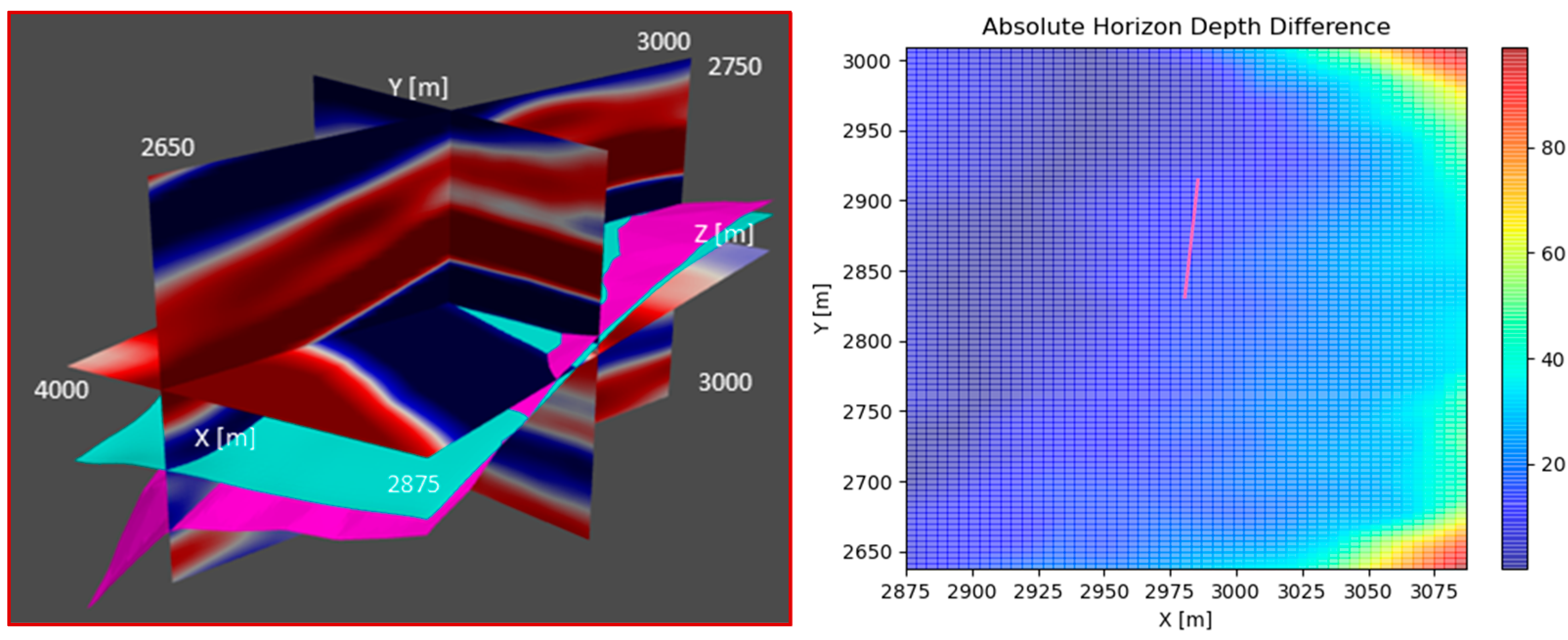
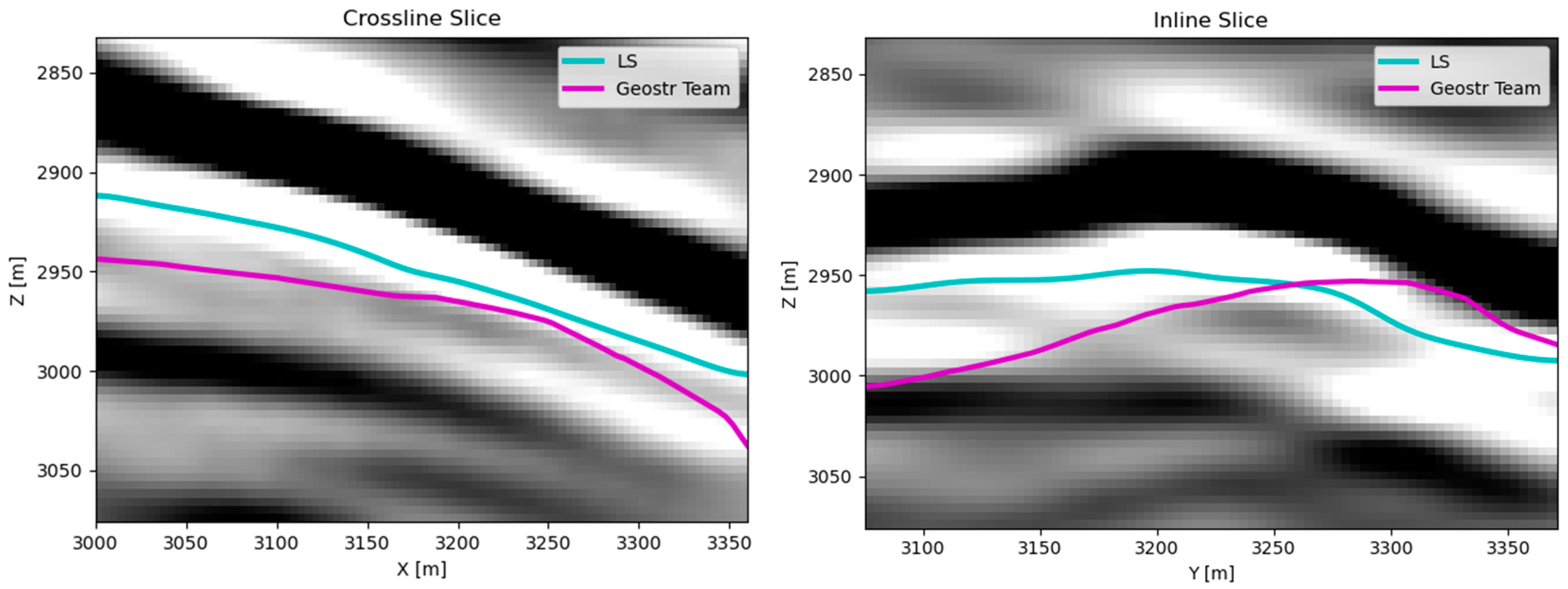
5.2. Field Test Cases
- 3D depth-migrated seismic image
- Geological interpretations
- o
- Formation boundary interpretations
- o
- 3D horizon interpretations (depth-migrated)
- o
- Fault interpretations
- o
- Well picks
- Composite well-log data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Pehlivantu, C. Modeling, Guidance, and Control for Cost Conscious Directional Drilling. Doctoral Thesis, The University of Texas, Austin, Austin, TX, USA, 2018. [Google Scholar]
- Zheng, D. Path Optimization Advisory and Analytical Tools for Directional Drilling. Doctoral Thesis, The University of Texas, Austin, Austin, TX, USA, 2017. [Google Scholar]
- Kullawan, K.; Bratvold, R.B.; Bickel, J.E. Sequential geosteering decisions for optimization of real-time well placement. J. Pet Sci. Eng. 2018, 165, 90–104. [Google Scholar] [CrossRef]
- Alyaev, S.; Bratvold, R.B.; Luo, X.; Suter, E.; Vefring, E.H. An interactive decision support system for geosteering operations. In Proceedings of the SPE Norway Subsurface Conference, Bergen, Norway, 18 April 2018. [Google Scholar] [CrossRef]
- D’Angelo, J.; Khaled, M.S.; Ashok, P.; van Oort, E. Pareto optimal directional drilling advisory for improved real-time decision making. J. Pet Sci. Eng. 2022, 210, 110031. [Google Scholar] [CrossRef]
- Nguyen, K.L.; Fahmy, M.F.; Dzhaykiev, B.; Odiase, P.O.; Al-Morakhi, R.; Al-Ajmi, M.M.; Verma, N.K.; Quttainah, R. Application of Logging While Drilling-Nuclear Magnetic Resonance in Reservoir Evaluation and Geosteering: A Case Study in Marrat Reservoir, Umm Roos Field, West Kuwait. In ADIPEC; OnePetro: Richardson, TX, USA, 2022. [Google Scholar] [CrossRef]
- Kullawan, K.; Bratvold, R.; Bickel, J.E. A Decision Analytic Approach to Geosteering Operations. SPE Drill. Complet. 2014, 29, 36–46. [Google Scholar] [CrossRef]
- Griffiths, R. Well Placement Fundamentals; Schlumberger: Houston, TX, USA, 2009. [Google Scholar]
- Pyrcz, M.J.; Deutsch, C.V. Geostatistical Reservoir Modeling; Oxford University Press: Oxford, UK, 2014. [Google Scholar]
- Tearpock, D.J.; Bischke, R.E. Applied Subsurface Geological Mapping; Prentice Hall: Hoboken, NJ, USA, 1991. [Google Scholar]
- Feng, R.; Grana, D.; Balling, N. Variational inference in Bayesian neural network for well-log prediction. Geophysics 2021, 86, M91–M99. [Google Scholar] [CrossRef]
- Winkler, H. Geosteering by exact inference on a Bayesian network. Geophysics 2017, 82, D279–D291. [Google Scholar] [CrossRef]
- Miao, Y.; Kowal, D.R.; Panchal, N.; Vila, J.; Vannucci, M. Nonlinear state-space modeling approaches to real-time autonomous geosteering. J. Pet Sci. Eng. 2020, 189, 107025. [Google Scholar] [CrossRef]
- Chen, Y.; Lorentzen, R.J.; Vefring, E.H. Optimization of Well Trajectory Under Uncertainty for Proactive Geosteering. SPE J. 2014, 20, 368–383. [Google Scholar] [CrossRef]
- Luo, X.; Eliasson, P.; Alyaev, S.; Romdhane, A.; Suter, E.; Querendez, E.; Vefring, E. An ensemble-based framework for proactive geosteering. In SPWLA Annual Logging Symposium; SPWLA: Houston, TX, USA, 2015; p. SPWLA-2015. Available online: https://onepetro.org/SPWLAALS/proceedings/SPWLA15/All-SPWLA15/SPWLA-2015-KKKK/28497 (accessed on 27 November 2023).
- Jahani, N.; Garrido, J.A.; Alyaev, S.; Fossum, K.; Suter, E.; Torres-Verdín, C. Ensemble-based well-log interpretation and uncertainty quantification for well geosteering. Geophysics 2022, 87, IM57–IM66. [Google Scholar] [CrossRef]
- Veettil, D.R.A.; Clark, K. Bayesian Geosteering Using Sequential Monte Carlo Methods. Petrophys.-SPWLA J. Form. Eval. Reserv. Descr. 2020, 61, 99–111. [Google Scholar] [CrossRef]
- Muhammad, R.B.; Srivastava, A.; Alyaev, S.; Bratvold, R.B.; Tartakovsky, D.M. High-Precision Geosteering via Reinforcement Learning and Particle Filters. arXiv 2024, arXiv:2402.06377. [Google Scholar]
- Pakyuz-Charrier, E.; Giraud, J.; Ogarko, V.; Lindsay, M.; Jessell, M. Drillhole uncertainty propagation for three-dimensional geological modeling using Monte Carlo. Tectonophysics 2018, 747–748, 16–39. [Google Scholar] [CrossRef]
- Wu, M.; Miao, Y.; Panchal, N.; Kowal, D.R.; Vannucci, M.; Vila, J.; Liang, F. Stochastic clustering and pattern matching for real-time geosteering. Geophysics 2019, 84, ID13–ID24. [Google Scholar] [CrossRef]
- Albusairi, M.; Torres-Verdín, C. Fast-forward modeling of borehole nuclear magnetic resonance measurements acquired in deviated wells and spatially heterogeneous formations. Geophysics 2023, 88, D95–D113. [Google Scholar] [CrossRef]
- Wu, X.; Geng, Z.; Shi, Y.; Pham, N.; Fomel, S.; Caumon, G. Building realistic structure models to train convolutional neural networks for seismic structural interpretation. Geophysics 2020, 85, WA27–WA39. [Google Scholar] [CrossRef]
- Khan, M.M.; Alam, A. High Resolution Adaptively Steered Horizon Tracker. In International Geophysical Conference and Oil & Gas Exhibition, Istanbul, Turkey, 17–19 September 2012; SEG Global Meeting Abstracts; Society of Exploration Geophysicists and the Chamber of Geophysical Engineers of Turkey: Houston, TX, USA, 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Geng, Z.; Wu, X.; Shi, Y.; Fomel, S. Deep learning for relative geologic time and seismic horizons. Geophysics 2020, 85, WA87–WA100. [Google Scholar] [CrossRef]
- Huang, L.; Dong, X.; Clee, T.E. A scalable deep learning platform for identifying geologic features from seismic attributes. Lead. Edge 2017, 36, 249–256. [Google Scholar] [CrossRef]
- Waldeland, A.U.; Jensen, A.C.; Gelius, L.-J.; Solberg, A.H.S. Convolutional neural networks for automated seismic interpretation. Lead. Edge 2018, 37, 529–537. [Google Scholar] [CrossRef]
- Alyaev, S.; Shahriari, M.; Pardo, D.; Omella, Á.J.; Larsen, D.S.; Jahani, N.; Suter, E. Modeling extra-deep electromagnetic logs using a deep neural network. Geophysics 2021, 86, E269–E281. [Google Scholar] [CrossRef]
- Fossum, K.; Alyaev, S.; Tveranger, J.; Elsheikh, A.H. Verification of a real-time ensemble-based method for updating earth model based on GAN. J. Comput. Sci. 2022, 65, 101876. [Google Scholar] [CrossRef]
- Alyaev, S.; Elsheikh, A.H. Direct Multi-Modal Inversion of Geophysical Logs Using Deep Learning. Earth Space Sci. 2022, 9, e2021EA002186. [Google Scholar] [CrossRef]
- Zhu, G.; Gao, M.; Wang, B. A robust inversion of logging-while-drilling responses based on deep neural network. Acta Geophys. 2023, 72, 129–139. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; Intelligent Robotics and Autonomous Agents Series; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Wu, X.; Fomel, S. Least-squares horizons with local slopes and multigrid correlations. Geophysics 2018, 83, IM29–IM40. [Google Scholar] [CrossRef]
- Wu, X.; Hale, D. Automatically interpreting all faults, unconformities, and horizons from 3D seismic images. Interpretation 2016, 4, T227–T237. [Google Scholar] [CrossRef]
- Wu, X.; Janson, X. Directional structure tensors in estimating seismic structural and stratigraphic orientations. Geophys. J. Int. 2017, 210, 534–548. [Google Scholar] [CrossRef]
- Hale, D. Structure-oriented smoothing and semblance. CWP Rep. 2009, 635. Available online: https://inside.mines.edu/~dhale/papers/Hale09StructureOrientedSmoothingAndSemblance.pdf (accessed on 27 November 2023).
- Aminzadeh, F.; Brac, J.; Kunz, T. 3-D Salt and Overthrust Models: 3-D Overthrust Model Disk 1. 1; SEG/EAGE 3-D Modeling Series; Society of Exploration Geophysicists: Houston, TX, USA, 1997; Available online: https://books.google.com/books?id=oU-pQgAACAAJ (accessed on 10 February 2024).
- Equinor, Volve Field Dataset. Available online: https://data.equinor.com/ (accessed on 27 November 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Well and Logs | MAE [m] | Pearson-R Score [−] | Length [m] |
|---|---|---|---|
| 15-9-F-1C DEN | 15.8 | 0.93 | 561 |
| 15-9-F-15D DEN | 9.2 | 0.97 | 1204 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Angelo, J.; Zhao, Z.; Zhang, Y.; Ashok, P.; Chen, D.; van Oort, E. Real-Time Automated Geosteering Interpretation Combining Log Interpretation and 3D Horizon Tracking. Geosciences 2024, 14, 71. https://doi.org/10.3390/geosciences14030071
D’Angelo J, Zhao Z, Zhang Y, Ashok P, Chen D, van Oort E. Real-Time Automated Geosteering Interpretation Combining Log Interpretation and 3D Horizon Tracking. Geosciences. 2024; 14(3):71. https://doi.org/10.3390/geosciences14030071
Chicago/Turabian StyleD’Angelo, John, Zeyu Zhao, Yifan Zhang, Pradeepkumar Ashok, Dongmei Chen, and Eric van Oort. 2024. "Real-Time Automated Geosteering Interpretation Combining Log Interpretation and 3D Horizon Tracking" Geosciences 14, no. 3: 71. https://doi.org/10.3390/geosciences14030071
APA StyleD’Angelo, J., Zhao, Z., Zhang, Y., Ashok, P., Chen, D., & van Oort, E. (2024). Real-Time Automated Geosteering Interpretation Combining Log Interpretation and 3D Horizon Tracking. Geosciences, 14(3), 71. https://doi.org/10.3390/geosciences14030071