1. Introduction
Modern mechanical structures, especially intelligent flexible mechanical structures, are densely distributed with sensors, processors, and actuators [
1]. Some transducers may apply inertial actions to the flexible structure, although they are also parts of the whole structure. In this study, structures with distributed gyroscopes will be studied, which has been verified as applicable in the control of soft structures such as space manipulation arms [
2,
3,
4].
The gyroelastic continua have been proposed by Hughes and D’Eleuterio to describe the mathematical modeling of structures with continuously distributed gyroscopes [
5,
6]. The dynamics of flexible structures with distributed appendages can be investigated by modal discretization techniques such as the Galerkin method by introducing a set of trial mode functions, which are usually the modal functions of the corresponding structure without appendages [
7,
8,
9]. Modal discretization techniques have shown powerful applications to structures with regular shapes (explicit modal functions) [
10,
11,
12,
13,
14]. However, modal discretization becomes unpractical when treating structures with irregular or complicated contours. Without analytical modal functions, modal discretization loses the configuration base. Although the base modal shapes can be obtained by the finite element method and transferred to the modal discretization procedure, the manipulations are apparently cumbersome.
Spatial discretization techniques such as the finite element method could tackle the dynamics of structures with arbitrary shapes. However, the available commercial finite element software provides no general modules to treat flexible structures with distributed gyroscopes. The distributed gyroscopes introduce a new dynamic effect to the structures and the most important contribution is the gyroscopic coupling effect, which is usually neglected in low angular momentum examples. With increasing angular momentum, the gyroscopic coupling becomes dominating and varies the frequency and modal motion drastically [
15,
16,
17,
18,
19,
20]. Gyroscopic coupling can be employed as a mechanism of sensor to detect rotating angles, which has been discussed in the literature [
21,
22,
23].
Although gyroscopic continua such as axially moving materials [
24] and rotating components [
25] have been studied widely, structures with discrete rotors have received less attention. In this study, we propose a spatial discretization technique designed to tackle flexible structures with distributed gyroscopes. The eigenfrequencies are studied and discussed. Both modal discretization and spatial discretization will be studied and compared by an example of gyroscope-distributed beam. The current study may expose the gyroscopic structures to more general numerical techniques.
3. Modal Discretization
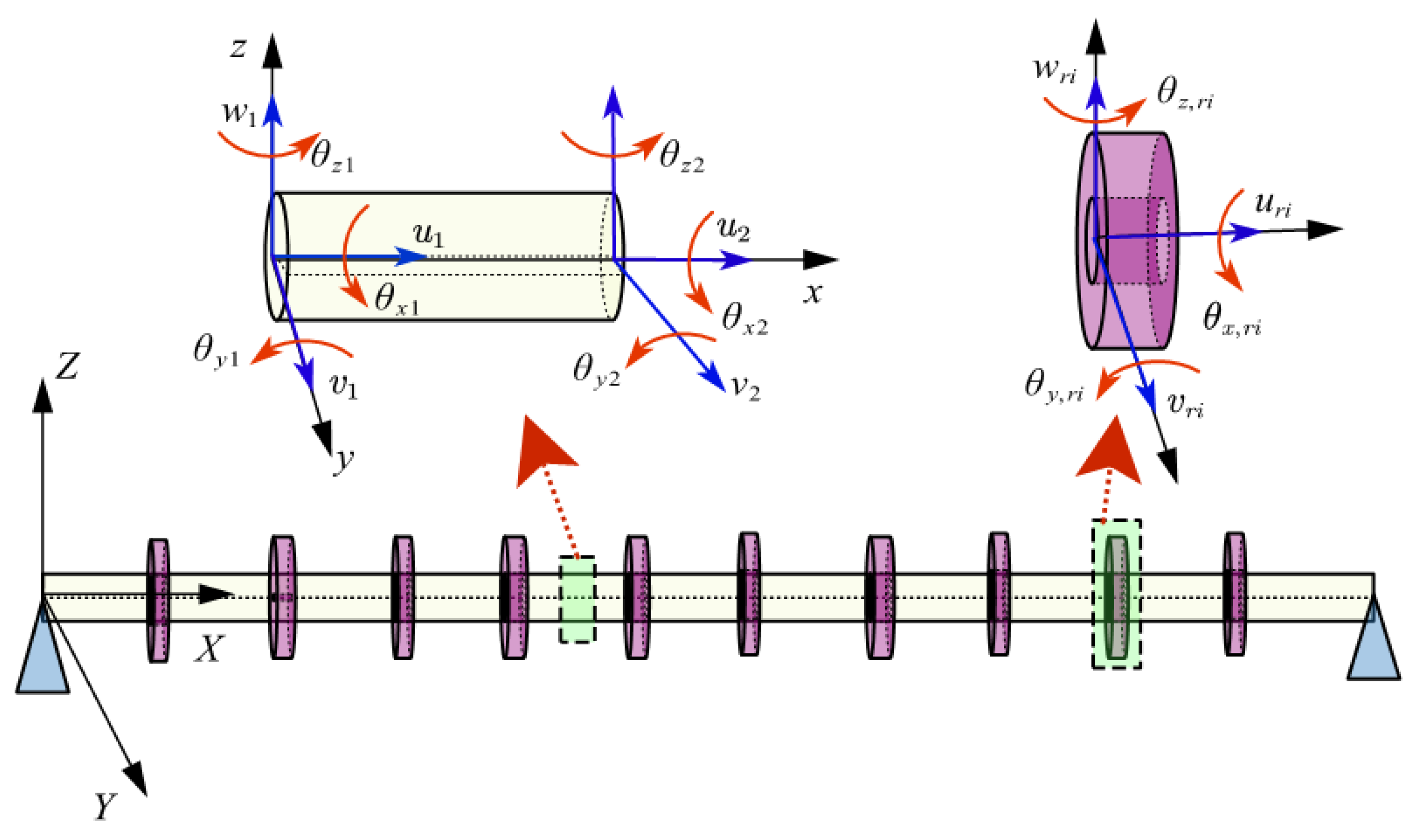
To describe the displacements of the beam elements and gyroscope elements, two reference frames are used: the inertial frame
Fb with the origin on one end of the beam on which the displacement of the beam is measured, and the non-inertial frame
Fri on which the rigid rotors are described (
Figure 2). The undeformed position vector of an arbitrary small element
dm in the beam is
measured in
Fb, the displacement vector is
, and the rotational angular vector is
. Similarly, the undeformed position vector and the displacement vector of the element
dmri on the
ith rotor are
,
, and
, respectively. Measured on the non-inertial frame
Fri, the position vector of the rotor element is
. The rotating velocity of the rotor is
with respect to the frame
Fri.
The translational and rotational displacements of the element
dm can be cast into the generalized coordinates by using the beam’s modal functions without gyroscopes:
where
fb is the matrix of unit vectors of the
Fb basis vectors;
Tm and
Rm are the translational and rotational displacement vectors, respectively, the values of which are given by the sine functions of the supported beam modes on the element position; and
τb is the generalized modal coordinate variable vector.
By the geometry of the elements shown in
Figure 2, the total displacements of the beam and the
ith rotor measured in
Fb are
The corresponding velocities are
and the accelerations are
where
is small and ignored in Equation (8).
The velocities and accelerations can be expressed in the modal discretized variables by substituting Equations (1) and (2) into Equations (5)–(8):
where
Ab,ri =
fbfriT is the transform matrix between the two frames
Fb and
Fri;
fb and
fri are the unit vector of the
Fb frame and
Fri frame, respectively; and
and
are the tilde matrix of vectors
rm,ri and
βri, respectively.
To apply Kane’s Equation, the rotating velocity of each gyroscope should be considered as a generalized coordinate. Hence, the generalized coordinates and generalized velocities of the system are and , respectively. If the first k order modes are used in the discretization, the number of generalized coordinates is k + n.
Based on Equation (9), the partial velocities of the beam element
dm are
Based on Equation (10), the partial velocities of the
ith gyroscopes are
The generalized inertial forces of the beam and rotors can be obtained by integrating the product of the partial velocity and acceleration over all of the structure:
where
When the normalized modal functions are used,
Eb is the identity matrix. Under the small deformation assumption, the transformation matrix
Ab, ri and
Ari, b are approximately identity matrices, which makes the angular momentum vector of the gyroscopes
On the other hand, the generalized active force due to the nominal stiffness of the structure is
where the stiffness matrix is defined as the diagonal array constituted by the square of the circular frequencies of the beam without any attachments,
Substituting Equations (17) and (20) into Kane’s Equation
and neglecting the angular accelerations of the gyroscopes, one obtains the final ordinary differential equation governing the generalized displacement
where the skew-symmetric gyroscopic matrix
G is
The superscript numbers in Equation (24) denote the row number of the corresponding matrix. The gyroscopic term expressed in the generalized coordinate in Equation (23) plays a key role, which leads to frequency bifurcation and complex modes.
The linear gyroscopic ordinary governing Equation (23) can be solved numerically and the natural frequencies and complex modes can be obtained by transferring the generalized variables back into physical deformations via relations (1) and (2).
4. Spatial Discretization
Spatial discretization is more adaptable than modal discretization when treating structures with complicated shapes, whose explicit mode functions cannot be obtained in a straightforward manner. In this study, we took the beam model with distributed gyroscopes to show the technique of spatial discretization. The segment of beam and segment of gyroscopes were considered as presented in
Figure 3. This spatial discretization technique can also be expanded to other irregular structures.
Every node of the beam element has six DOFs, three translational displacements (
u,
v,
w), and three rotational displacements (
θx,
θy,
θz) along the three coordinates
x,
y, and
z, respectively. The transversal rotational angles are
The displacement vector of an arbitrary position in element
e with length
le is
The displacement vector can be expressed using the classical finite element cubic interpolating equation for bending deflections and linear interpolating equation for axial and torsional deflections, so that
where [
N] is the shape function matrix of the three-dimensional finite element, and the nodal displacement vector is
Equation (27) can be written as
where [
NT], [
Nθ], and [
Nφ] are the translation, bending rotation, and torsional rotation shape function matrices, respectively. The shape function expressions can be found in the available references such as [
28,
30,
31].
The element composed of a rigid gyroscope can be assumed as a distributed elastic beam with additional momentum. The
ith gyroscope with finite length
le, ri has the displacements
The gyroscope elements share the same features with beam elements except the extra gyroscope rotation angle
φ. Hence, the kinetic energy an arbitrary element is
where the symbol Δ
i,j denotes if the gyroscope
i has been installed on the position
j:
The variables and parameters in Equation (31) are stated as follows. The mass density of the beam element and the
ith gyroscope are
mb and
mri, respectively. The translational and angular velocity vectors of the beam and gyroscopes are
The moment of inertia of the beam element and the
ith gyroscope are
Substituting Equations (33)–(35) to Equation (31), the kinetic energy can simplified as
where
The potential energy of the beam element is
where
A is the cross-sectional area;
Iy and
Iz are the area of moment of inertia around the
y and
z axes; and the
J polar area moment of inertia. It is assumed that the gyroscopes do not contribute to the total potential energy.
Substituting the kinetic energy and potential energy into Lagrange Equation
the governing equation of the
jth element is then
where
is generalized active force, and
When the gyroscopic term of Δi,j vanishes, the spatial discretized Equation (42) recovers to the classical one of a pure beam case.
By assembling the mass, gyroscopic and stiffness matrices of the individual elements, the global matrices of the entire structure can be obtained:
where the
N-nodes displacement vector is
Further applying the boundary conditions and neglecting the active forces, the final governing equations are
The Δ symbol describes the position where the gyroscopes are installed and the gyroscopic effect works in the vicinity of the exact position. While all of the gyroscopes are for the modal discretization case, Equation (23) takes the gyroscopic effect on the whole system.
5. Numerical Results and Comparison
To compare the modal discretization and spatial discretization techniques, a simply supported beam with ten uniformly distributed gyroscopes was studied as a demonstrating example. The length, density, cross section radius, Young’s modulus, and shear modulus were , , , , , respectively. The length, density, inner and outer radius for the each gyroscope were , , 0.1 m, 0.2 m, respectively.
In
Figure 4, the first four pairs of natural frequencies computed by 121 order modal discretization and 121-element spatial discretization are presented with varying angular momentum of the uniformly distributed gyroscopes. With the supplement of the gyroscopes, any one of the natural frequencies, denoting the planar modes, bifurcates into two, denoting the lower backward whirling (BW) and the higher forward whirling (FW) of three dimensional complex modes. The first four orders of the complex modes of both backward whirling and forward whirling are demonstrated in
Figure 5. Similar phenomena on the frequency and complex mode appeared in [
11], but the angular momentum was assumed to be continuously distributed.
The varying frequencies with zig-zag configurations are related to the veering phenomenon, which has been discussed in gyroscopic structures such as rotors, blades, and gears [
17,
32,
33,
34]. In the current study, we did not consider the veering phenomenon, but focused on the numerical methods that have the power to show the gyroscopic dynamics.
To show the convergence of the two methods, the results from the different discretization orders are listed in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11,
Table 12,
Table 13,
Table 14,
Table 15,
Table 16 and
Table 17. The frequency unit in all tables is expressed as ‘rad/s’. In
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8 and
Table 9, the natural frequencies for the different momentum of gyroscopes are presented to show the accuracy with the increasing modal discretization order
k. It can be found that the results are satisfactory when the discretization order
k is two times higher than the maximum mode being studied. If only lower vibration modes are used, the lower discretization order can be adopted to save computation time consumption. The modal discretization method has been shown to be efficient and powerful when dealing with a regular structure whose modal functions without attachments are explicit.
The spatial discretization method provides an efficient technique to treat irregular structures. In
Table 9,
Table 10,
Table 11,
Table 12,
Table 13,
Table 14,
Table 15 and
Table 16, the natural frequencies are listed for different angular momentum to show the convergence with increasing element numbers. The power of the spatial discretization has been demonstrated by satisfactory results. With increasing element numbers, the computation time will increase. However, lower order discretization may provide data with sufficient accuracy. Compared to modal discretization, more computational cost is required. Such a drawback opens the chance to deal with structures of irregular shapes.
For both methods, the higher gyroscope momentum requires higher order discretization to ensure accuracy. In
Table 17, the results of the modal discretization and spatial discretization were compared with the gyroscope momentum up to 2000 Nms, where the 240 order discretization was used. The deviations between the natural frequencies of the two methods were less than 5%, which validates the accuracy of both methods.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}