Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera



Abstract
:1. Introduction
- We propose an automatic drone-based solution that can operate autonomously with minimal user intervention.
- The proposed solution can detect and exactly locate the faulty PV modules in a large-scale PV power station.
- Our approach was tested in a real environment on a large-scale 1-MW PV power station, demonstrating the practical applicability of our work.
2. Related Works
Limitations
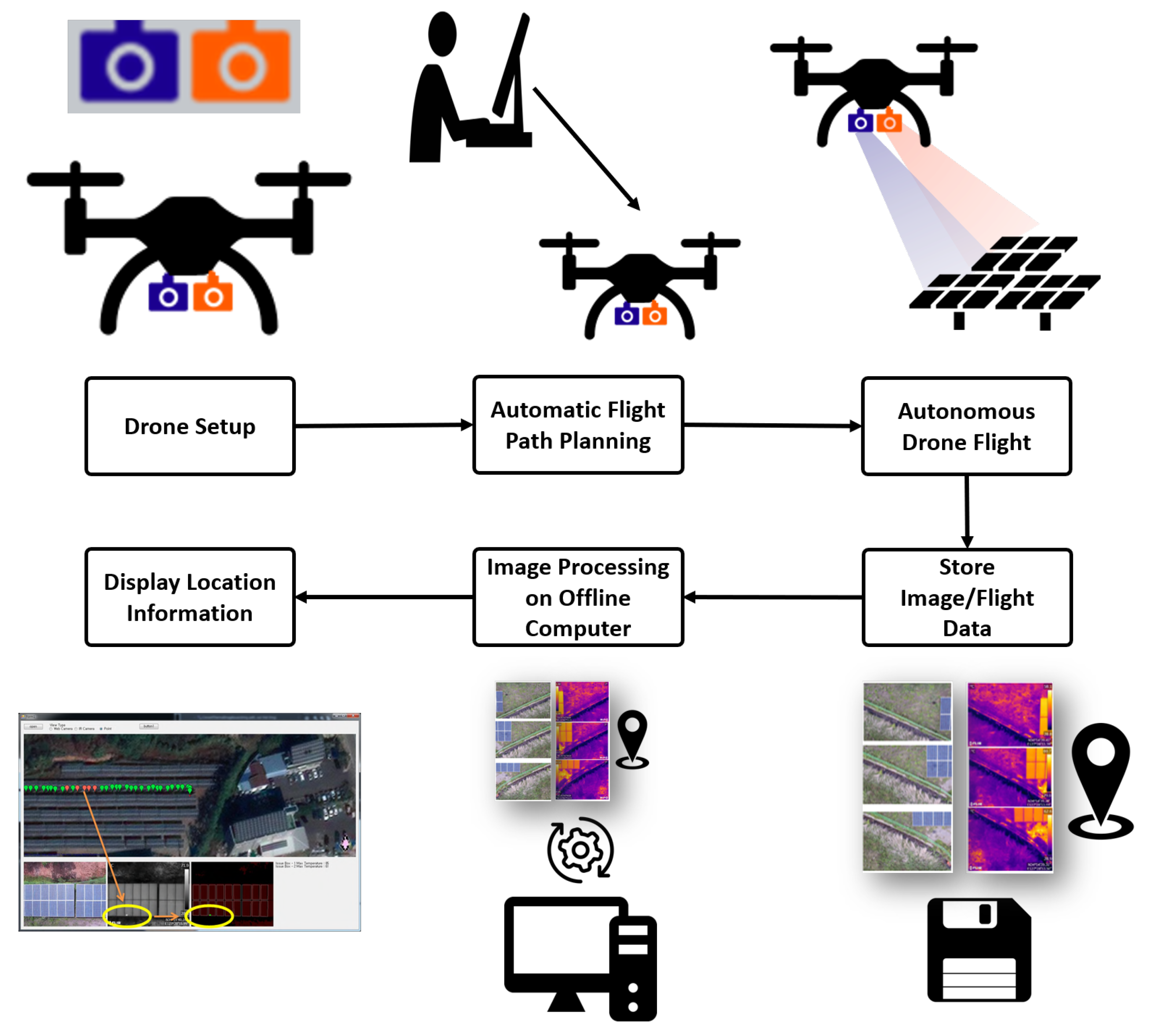
3. System Configuration
- Prepare drone’s hardware structure which includes mounting of the dual camera setup.
- Plan the flight’s path automatically with flight planning algorithm and feed it to the drone.
- The drone flies over the designated path autonomously and the captured images are saved to an SD card along with the GPS information.
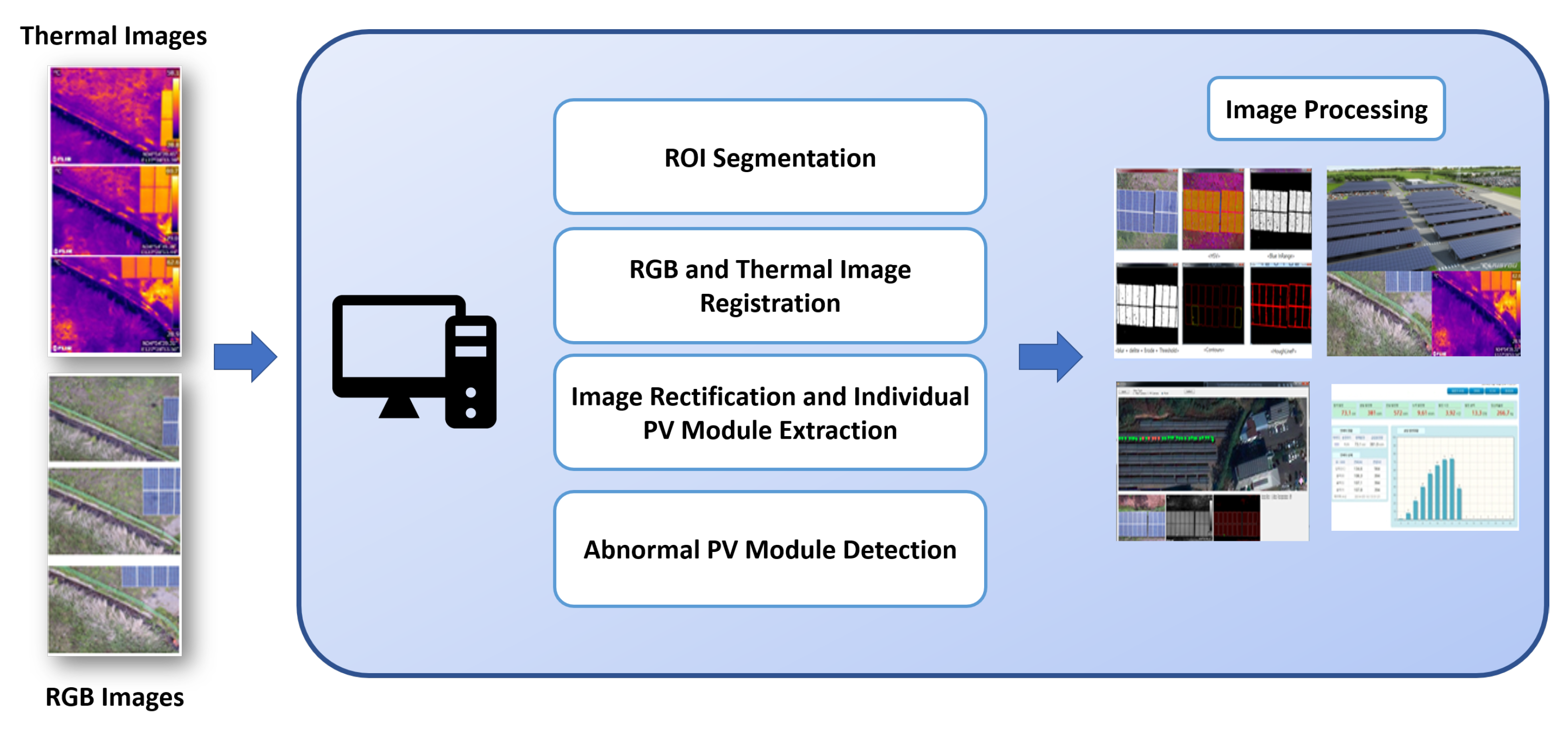
- The saved images are processed using our proposed image processing algorithm on a desktop computer.
- The locations of the defective solar panels are displayed to the user.
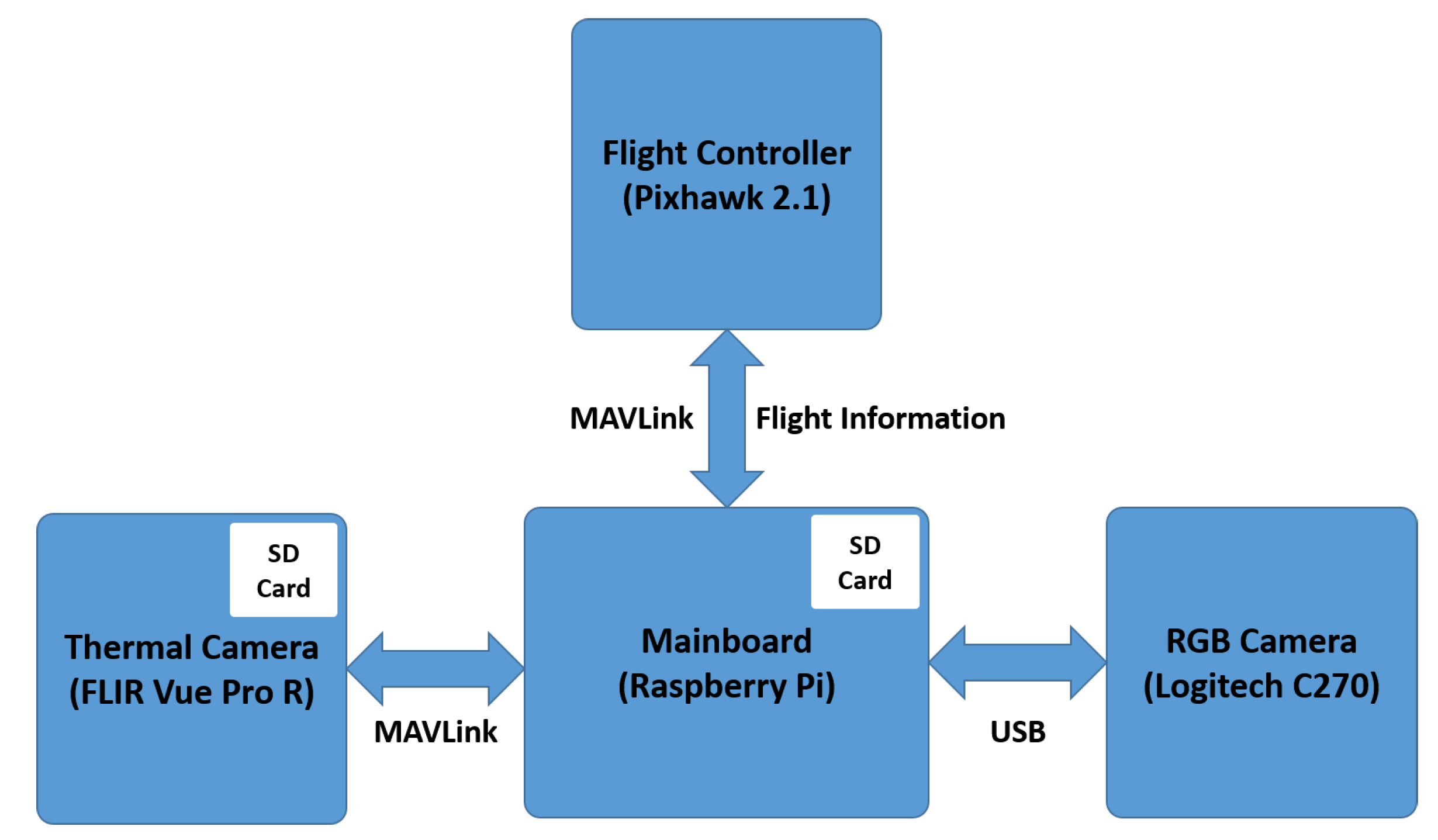
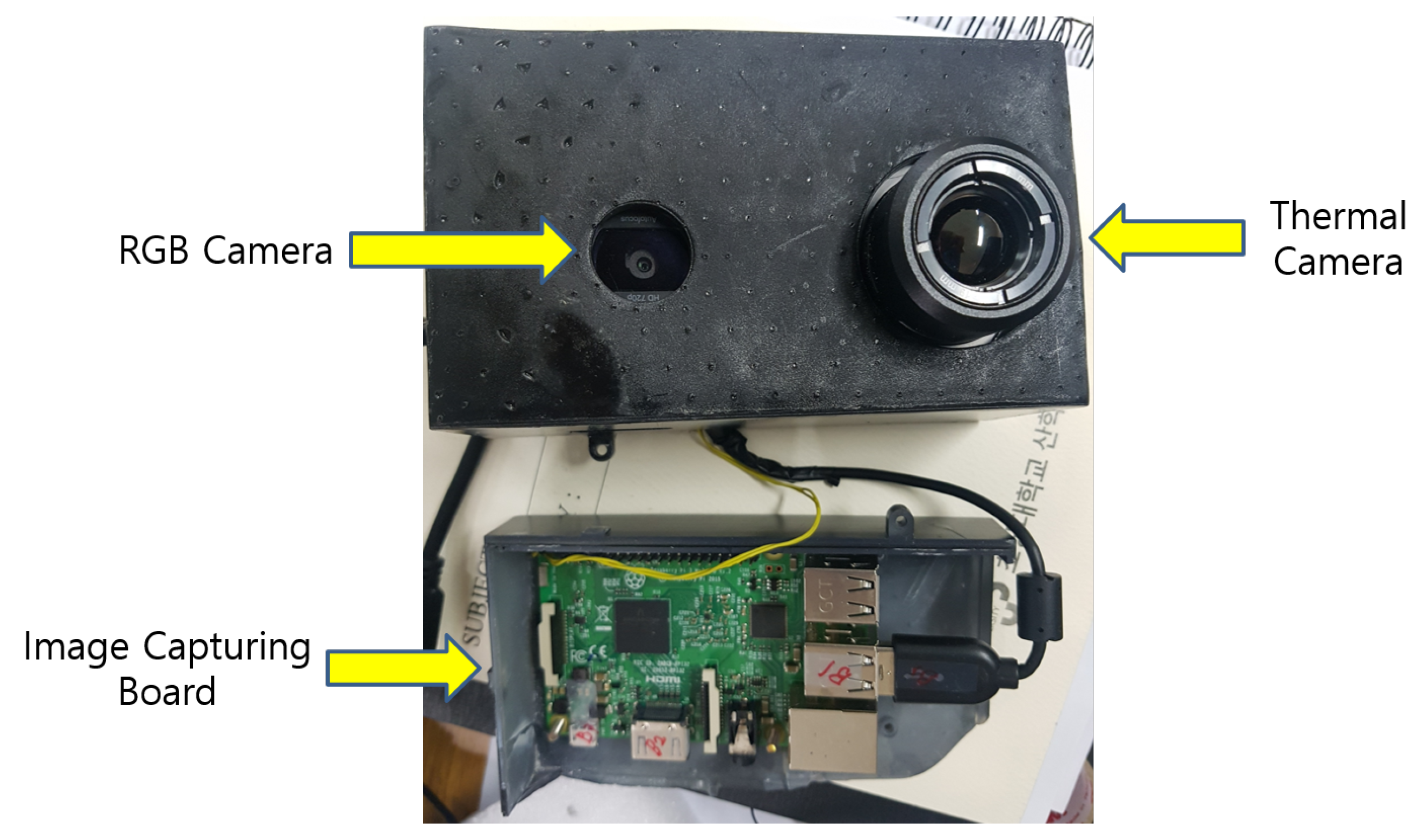
3.1. Drone Hardware Details
3.1.1. Mainboard (Raspberry Pi 3)
3.1.2. Dual Camera Setup (Thermal and RGB Camera)
3.1.3. Flight Controller (Pixhawk 2.1)
3.2. Software Implementation Details
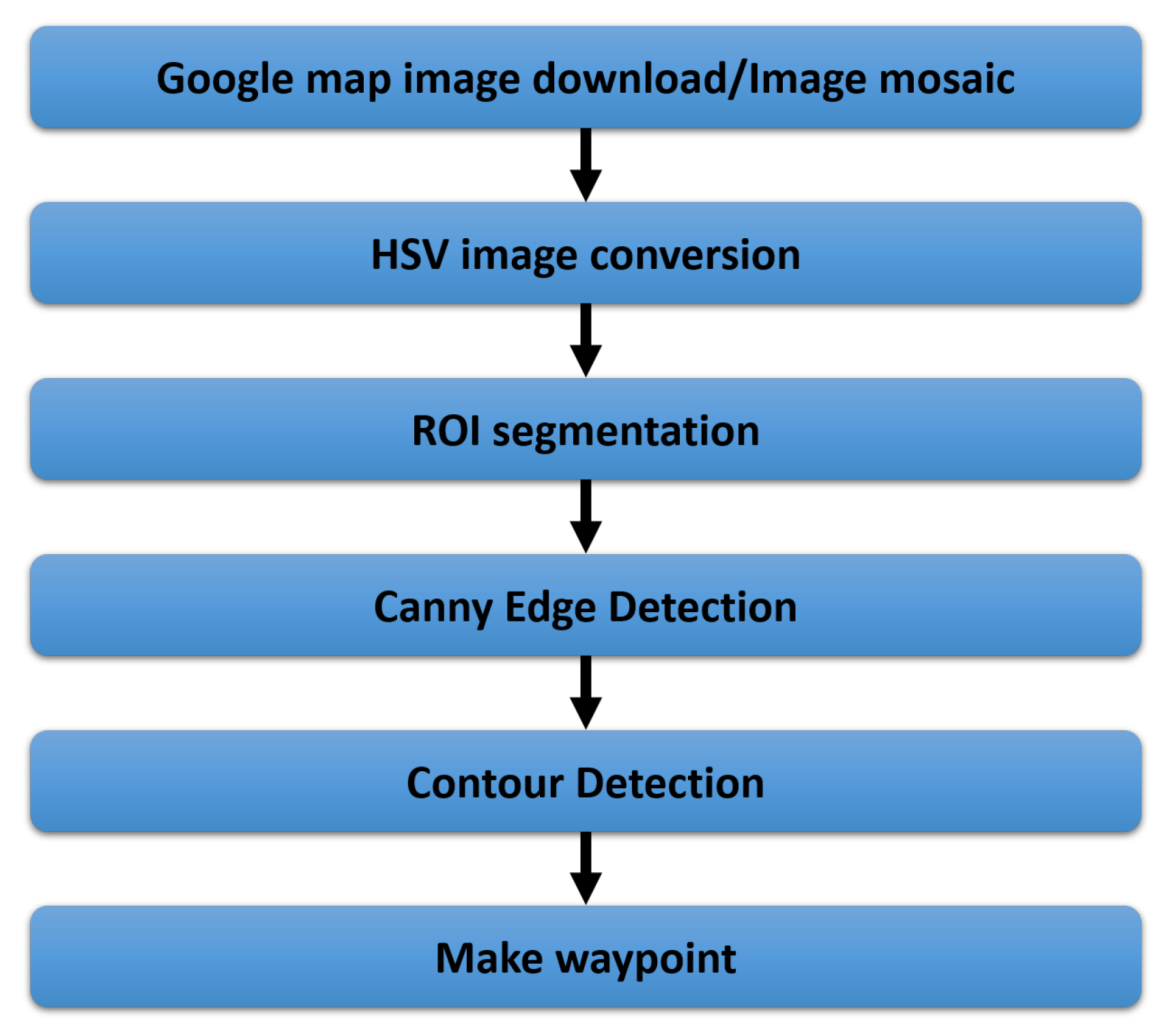
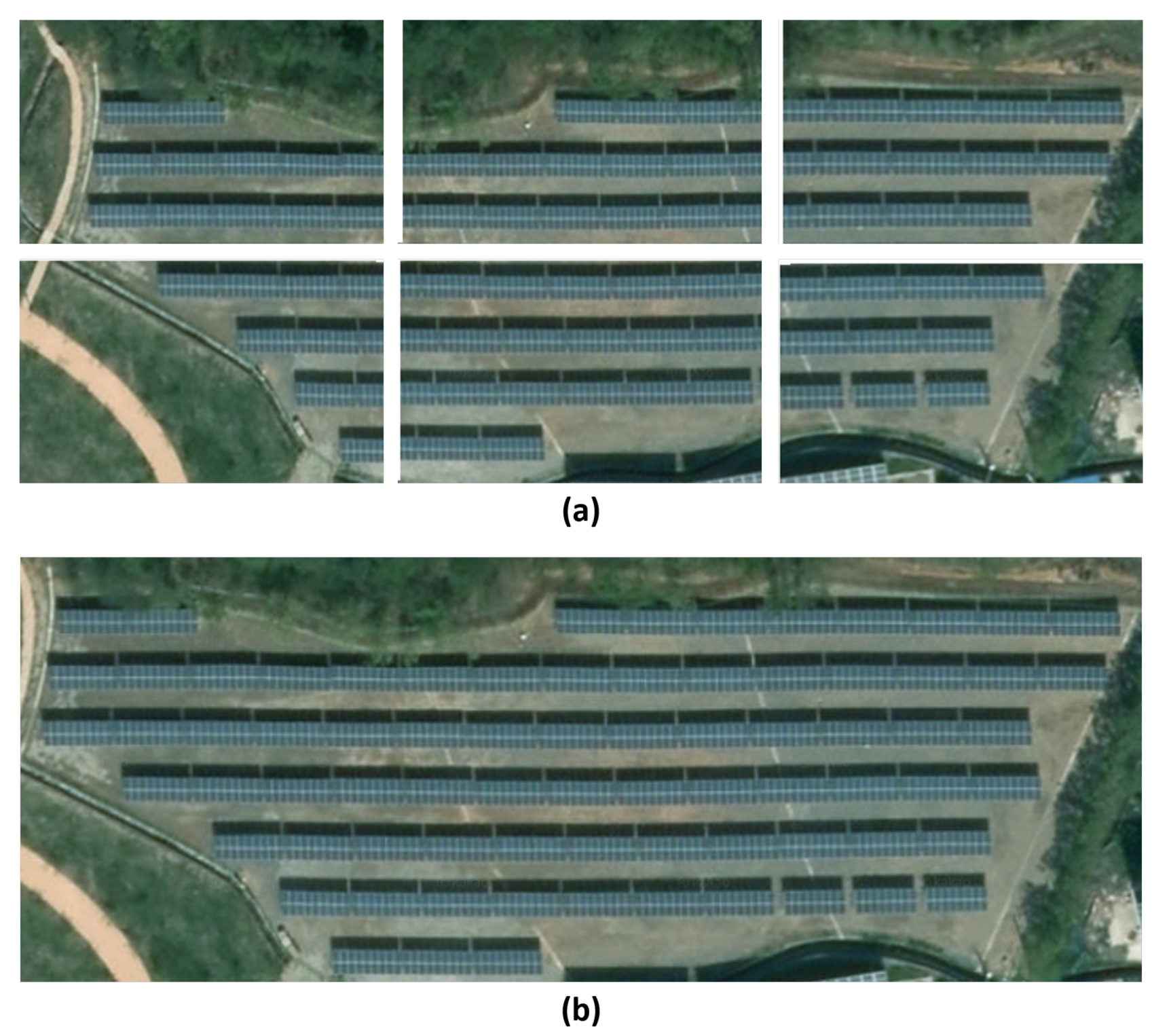
3.3. Autonomous Flight Path Planning Algorithm
3.4. Thermal Image Processing
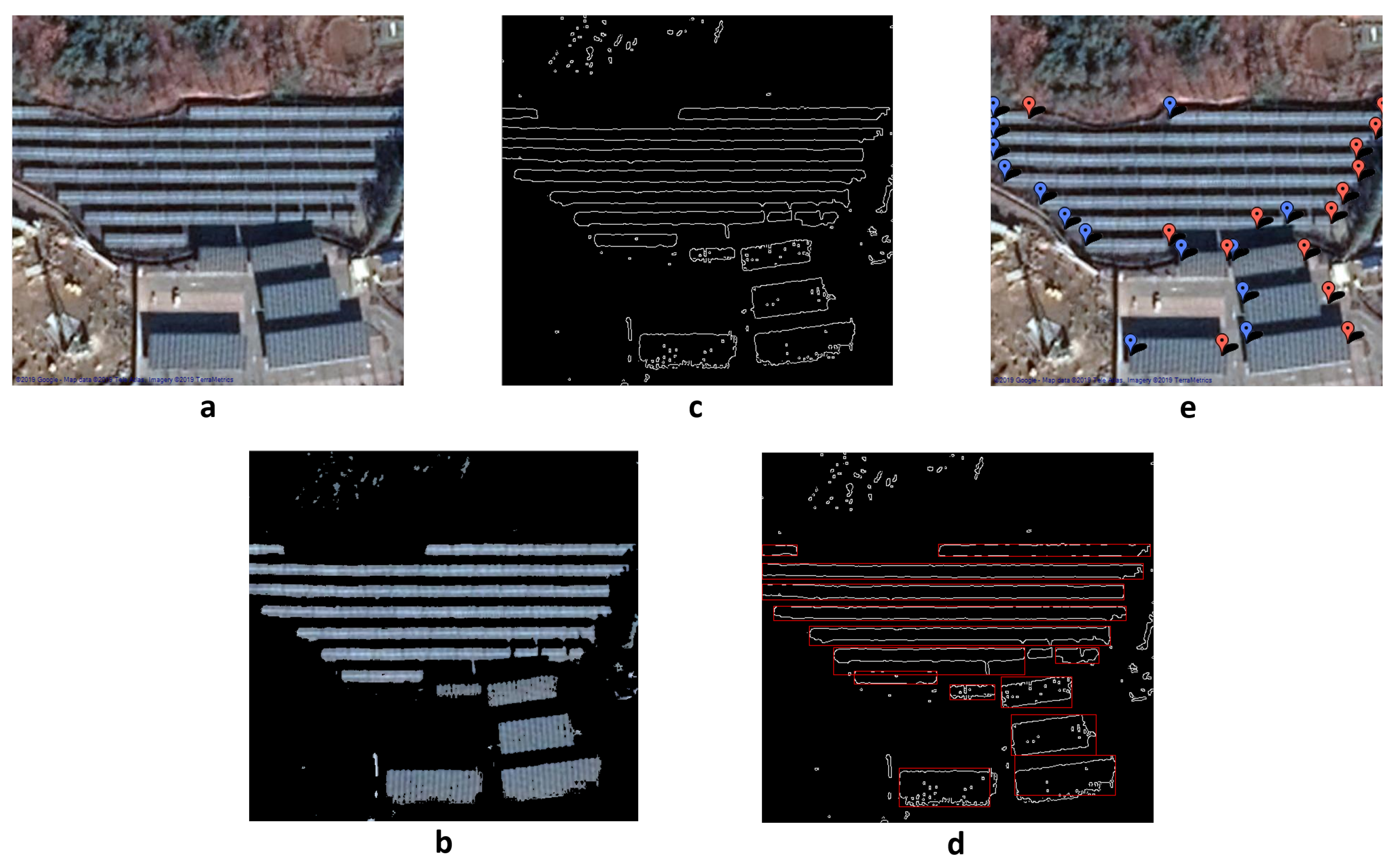
3.4.1. ROI Segmentation
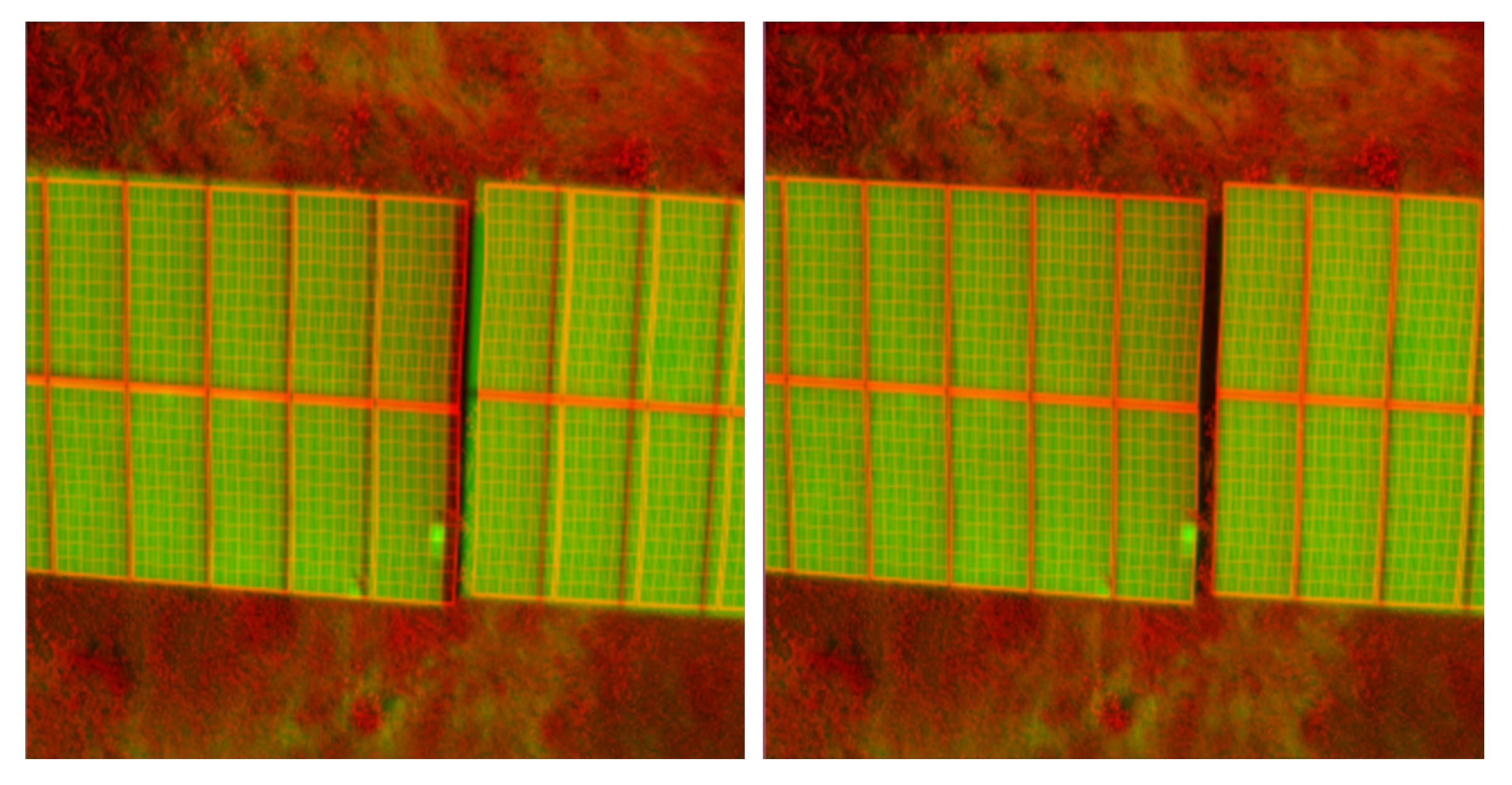
3.4.2. RGB and Thermal Image Registration
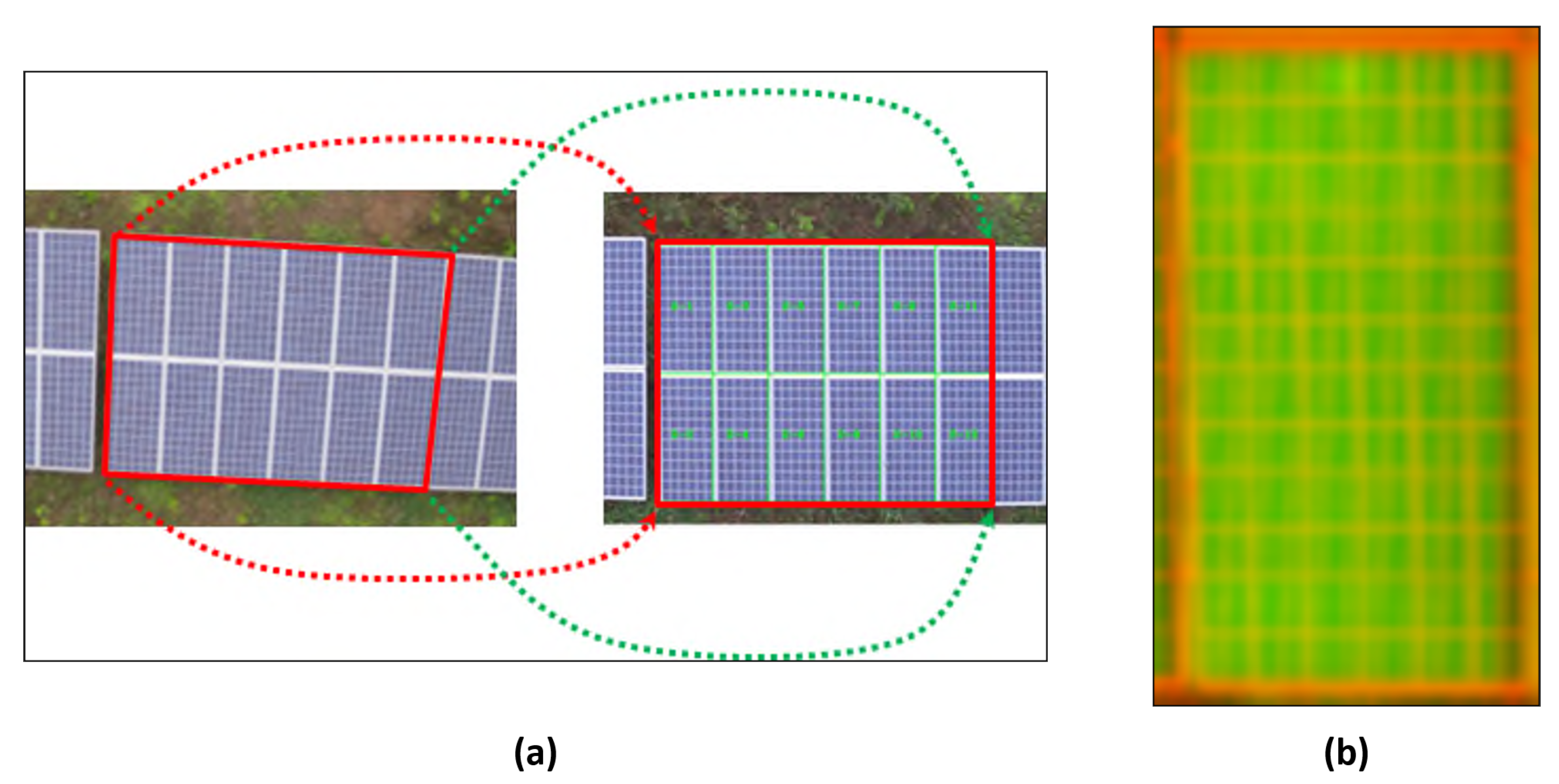
3.4.3. Image Rectification and Individual PV Module Extraction
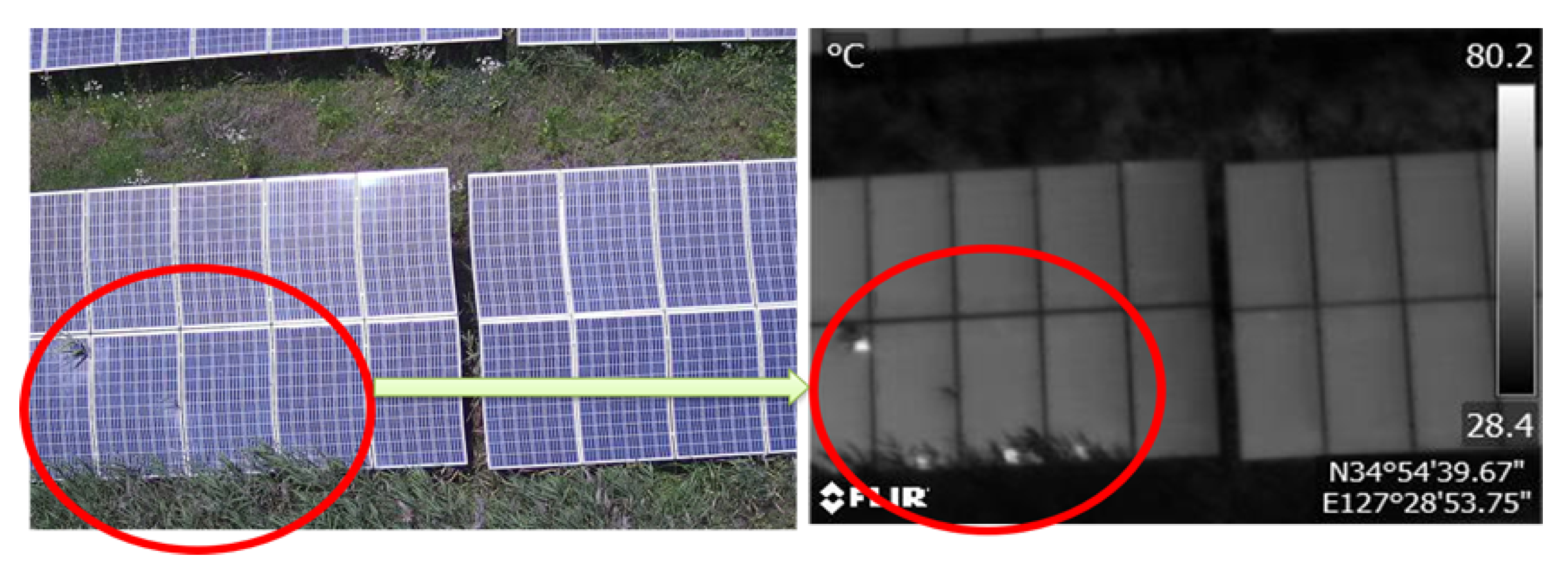
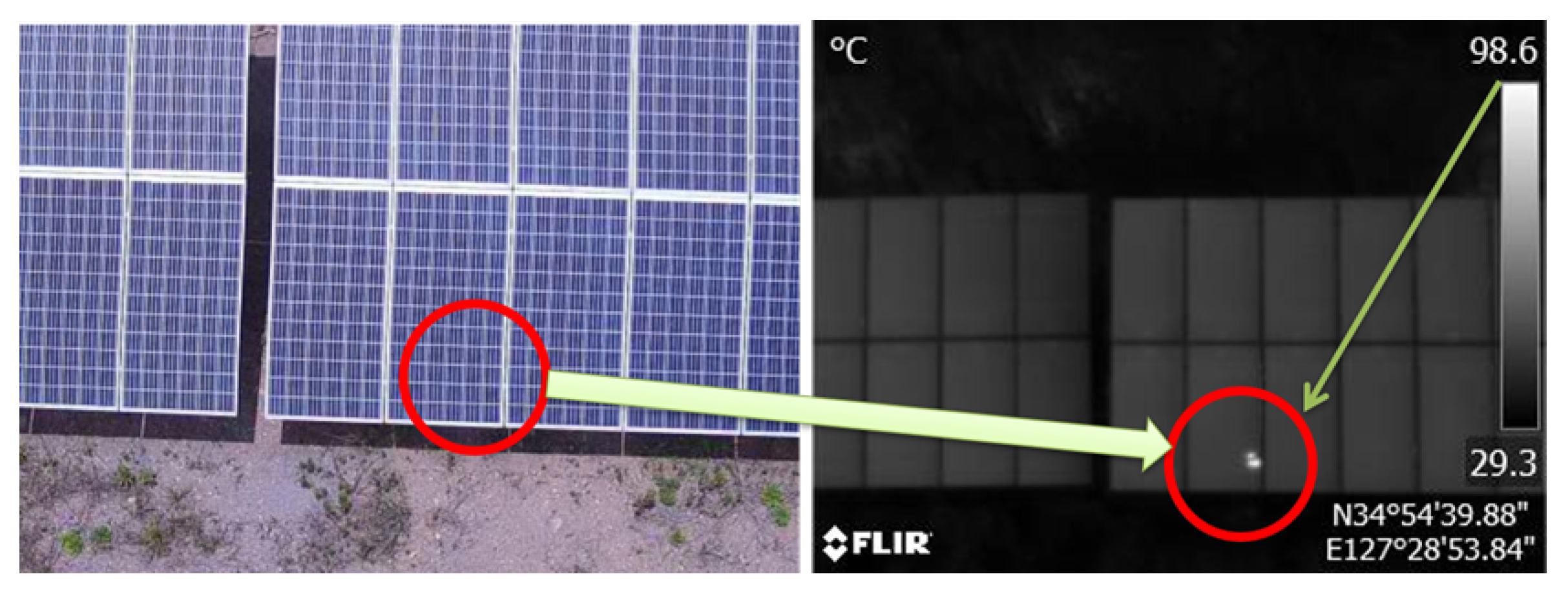
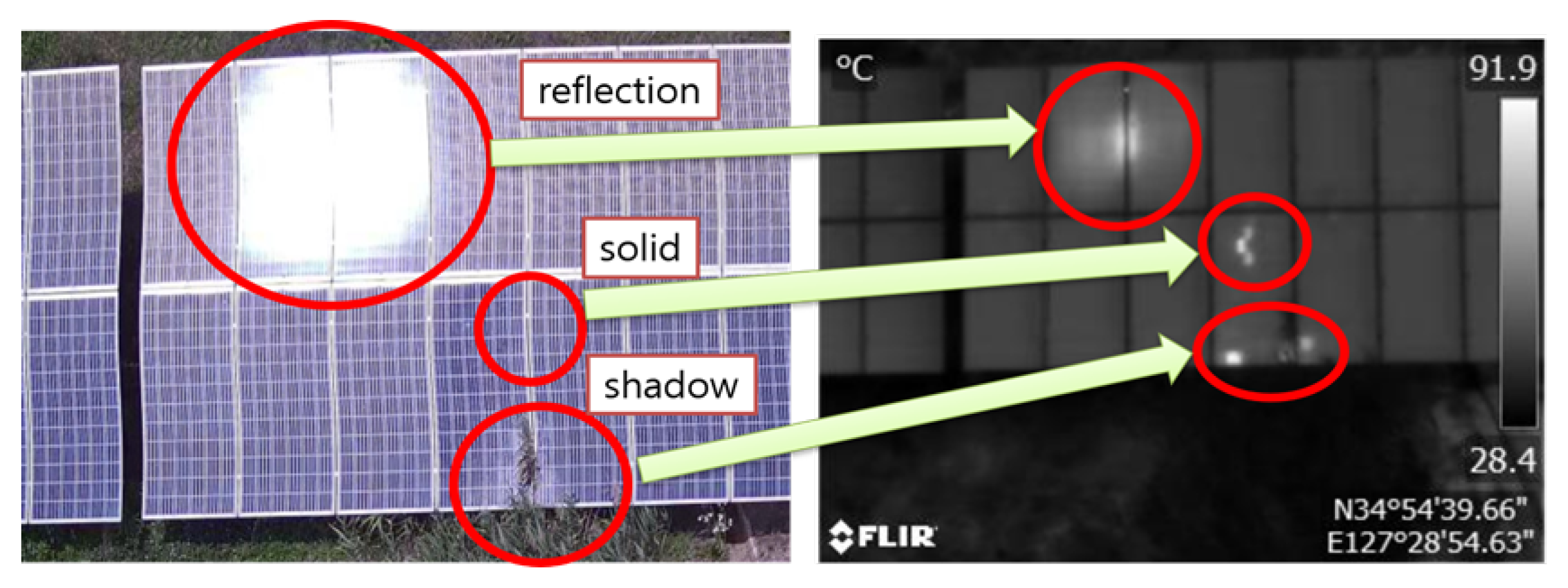
3.4.4. Abnormal PV Module Detection
4. Experimental Results, and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaushika, N.; Rai, A.K. An investigation of mismatch losses in solar photovoltaic cell networks. Energy 2007, 32, 755–759. [Google Scholar] [CrossRef]
- Alonso-Garcia, M.; Ruiz, J.; Chenlo, F. Experimental study of mismatch and shading effects in the I–V characteristic of a photovoltaic module. Sol. Energy Mater. Sol. Cells 2006, 90, 329–340. [Google Scholar] [CrossRef]
- Demant, M.; Rein, S.; Krisch, J.; Schoenfelder, S.; Fischer, C.; Bartsch, S.; Preu, R. Detection and analysis of micro-cracks in multi-crystalline silicon wafers during solar cell production. In Proceedings of the 2011 37th IEEE Photovoltaic Specialists Conference, Seattle, WA, USA, 19–24 June 2011; pp. 001641–001646. [Google Scholar]
- Drews, A.; De Keizer, A.; Beyer, H.G.; Lorenz, E.; Betcke, J.; Van Sark, W.; Heydenreich, W.; Wiemken, E.; Stettler, S.; Toggweiler, P.; et al. Monitoring and remote failure detection of grid-connected PV systems based on satellite observations. Sol. Energy 2007, 81, 548–564. [Google Scholar] [CrossRef] [Green Version]
- Muselli, M.; Notton, G.; Canaletti, J.; Louche, A. Utilization of meteosat satellite-derived radiation data for integration of autonomous photovoltaic solar energy systems in remote areas. Energy Convers. Manag. 1998, 39, 1–19. [Google Scholar] [CrossRef]
- Tseng, D.C.; Liu, Y.S.; Chou, C.M. Automatic finger interruption detection in electroluminescence images of multicrystalline solar cells. Math. Probl. Eng. 2015, 2015, 879675. [Google Scholar] [CrossRef]
- Tsai, D.M.; Li, G.N.; Li, W.C.; Chiu, W.Y. Defect detection in multi-crystal solar cells using clustering with uniformity measures. Adv. Eng. Inform. 2015, 29, 419–430. [Google Scholar] [CrossRef]
- Wang, C.; Jiang, X.Y.; Liu, X.H. Defect detection in crystalline silicon solar cells based on electroluminescence imaging. J. Optoelectron. Laser 2011, 9. Available online: http://en.cnki.com.cn/Article_en/CJFDTotal-GDZJ201109014.htm (accessed on 28 April 2020).
- Addabbo, P.; Angrisano, A.; Bernardi, M.L.; Gagliarde, G.; Mennella, A.; Nisi, M.; Ullo, S. A UAV infrared measurement approach for defect detection in photovoltaic plants. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 345–350. [Google Scholar]
- Zhang, P.; Zhang, L.; Wu, T.; Zhang, H.; Sun, X. Detection and location of fouling on photovoltaic panels using a drone-mounted infrared thermography system. J. Appl. Remote Sens. 2017, 11, 016026. [Google Scholar] [CrossRef]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised fault detection and analysis for large photovoltaic systems using drones and machine vision. Energies 2018, 11, 2252. [Google Scholar] [CrossRef] [Green Version]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for cooperative inspection of PV plants. IEEE J. Photovolt. 2014, 4, 1107–1113. [Google Scholar] [CrossRef] [Green Version]
- Aghaei, M.; Gandelli, A.; Grimaccia, F.; Leva, S.; Zich, R. IR real-time analyses for PV system monitoring by digital image processing techniques. In Proceedings of the 2015 International Conference on Event-Based Control, Communication, and Signal Processing (EBCCSP), Krakow, Poland, 17–19 June 2015; pp. 1–6. [Google Scholar]
- Aghaei, M.; Dolara, A.; Leva, S.; Grimaccia, F. Image resolution and defects detection in PV inspection by unmanned technologies. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Aghaei, M.; Grimaccia, F.; Gonano, C.A.; Leva, S. Innovative automated control system for PV fields inspection and remote control. IEEE Trans. Ind. Electron. 2015, 62, 7287–7296. [Google Scholar] [CrossRef]
- Dotenco, S.; Dalsass, M.; Winkler, L.; Würzner, T.; Brabec, C.; Maier, A.; Gallwitz, F. Automatic detection and analysis of photovoltaic modules in aerial infrared imagery. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016; pp. 1–9. [Google Scholar]
- Lee, S.; An, K.E.; Jeon, B.D.; Cho, K.Y.; Lee, S.J.; Seo, D. Detecting faulty solar panels based on thermal image processing. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–2. [Google Scholar]
- Jeong, H.; Kwon, G.R.; Lee, S.W. Deterioration diagnosis of solar module using thermal and visible image processing. Energies 2020. accepted. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Donoser, M.; Bischof, H. Efficient maximally stable extremal region (MSER) tracking. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 553–560. [Google Scholar]
- Guide to the Use of Thermal Imaging Cameras in the Construction Industry and When Working with Renewable Energy Sources. Available online: http://www.flirmedia.com/MMC/THG/Brochures/T820325/T820325_EN.pdf (accessed on 1 May 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Strengths | Weaknesses |
|---|---|---|
| Quarter et al. [12] | - Detect several PV module’s failure. - Tested on large dataset: 10 polycrystalline silicon modules. | - Unable to localize faulty PV modules. |
| Aghaei et al. [15] | - Compute percentage of damage and degradation. - Localize faulty modules. | - Lacks testing on large-scale PV power station. |
| Dotenco et al. [16] | - Detection of PV modules and classification of defects. - Identifies significant temperature abnormalities. - Localize faulty modules. | - Remote controlled. - Lacks testing on large-scale PV power station. |
| Aghaei et al. [13] | - Efficient real time diagnostics and inspection. - Compute degradation percentage and boundary area. | - Does not specify specific defects. - Unable to localize faulty PV modules. - Lacks testing on large-scale PV power station. |
| Aghaei et al. [14] | - Identify the correlation between altitudes of aerial images taken by the UAV and possible defects’ identification. | - Remote controlled. - Unable to localize faulty PV modules. - Lacks testing on large-scale PV power station. |
| Addabbot et al. [9] | - Information integration from multiple sources. - Panel identification and detection of thermal anomalies. | - Requires geo-referenced data which are not available at all times. - Lacks testing on large-scale PV power station. |
| Zhang et al. [10] | - Localize faulty modules. - Tested on large scale datasets. | - Remote controlled. |
| Alsafasfeh et al. [11] | - Real time inspection and fault detection - Localize faulty modules. - Tested on Large scale datasets. | - Remote controlled. |
| Lee et al. [17] | - Localize faulty modules. | - Remote controlled. - Lacks testing on large-scale PV power station. |
| Proposed method | - Localize faulty modules. - Tested on Large scale datasets. - Autonomous drone control. | - Cause of detected fault must be figured out manually. |
| Condition | No. of Frames | N/A (Sunlight) | Shadow | Pollution | Unknown | Total | |
|---|---|---|---|---|---|---|---|
| 1 | No control | 400 | 60 | 10 | 2 | 2 | 14 |
| 2 | Angle control | 400 | 0 | 17 | 3 | 1 | 21 |
| 3 | Angle control | 400 | 0 | 1 | 0 | 1 | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Henry, C.; Poudel, S.; Lee, S.-W.; Jeong, H. Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Appl. Sci. 2020, 10, 3802. https://doi.org/10.3390/app10113802
Henry C, Poudel S, Lee S-W, Jeong H. Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Applied Sciences. 2020; 10(11):3802. https://doi.org/10.3390/app10113802
Chicago/Turabian StyleHenry, Chris, Sahadev Poudel, Sang-Woong Lee, and Heon Jeong. 2020. "Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera" Applied Sciences 10, no. 11: 3802. https://doi.org/10.3390/app10113802
APA StyleHenry, C., Poudel, S., Lee, S.-W., & Jeong, H. (2020). Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Applied Sciences, 10(11), 3802. https://doi.org/10.3390/app10113802