Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene

Abstract
:1. Introduction
- (a)
- Defines the construction environment as an “ongoing scene” that differs from static and dynamic environment.
- (b)
- Creates a novel robust localization model combining artificial landmarks of the original scene with ongoing features.
- (c)
- Proposes a hybrid localization algorithm based on adaptive weights driven by Lidar measurement and feature matching.
- (d)
- Compares the matching accuracy and efficiency of ICP based on the generated features to typical ICP based on the whole scenes.
2. Problem Formulation
2.1. Definition of the Ongoing Scene
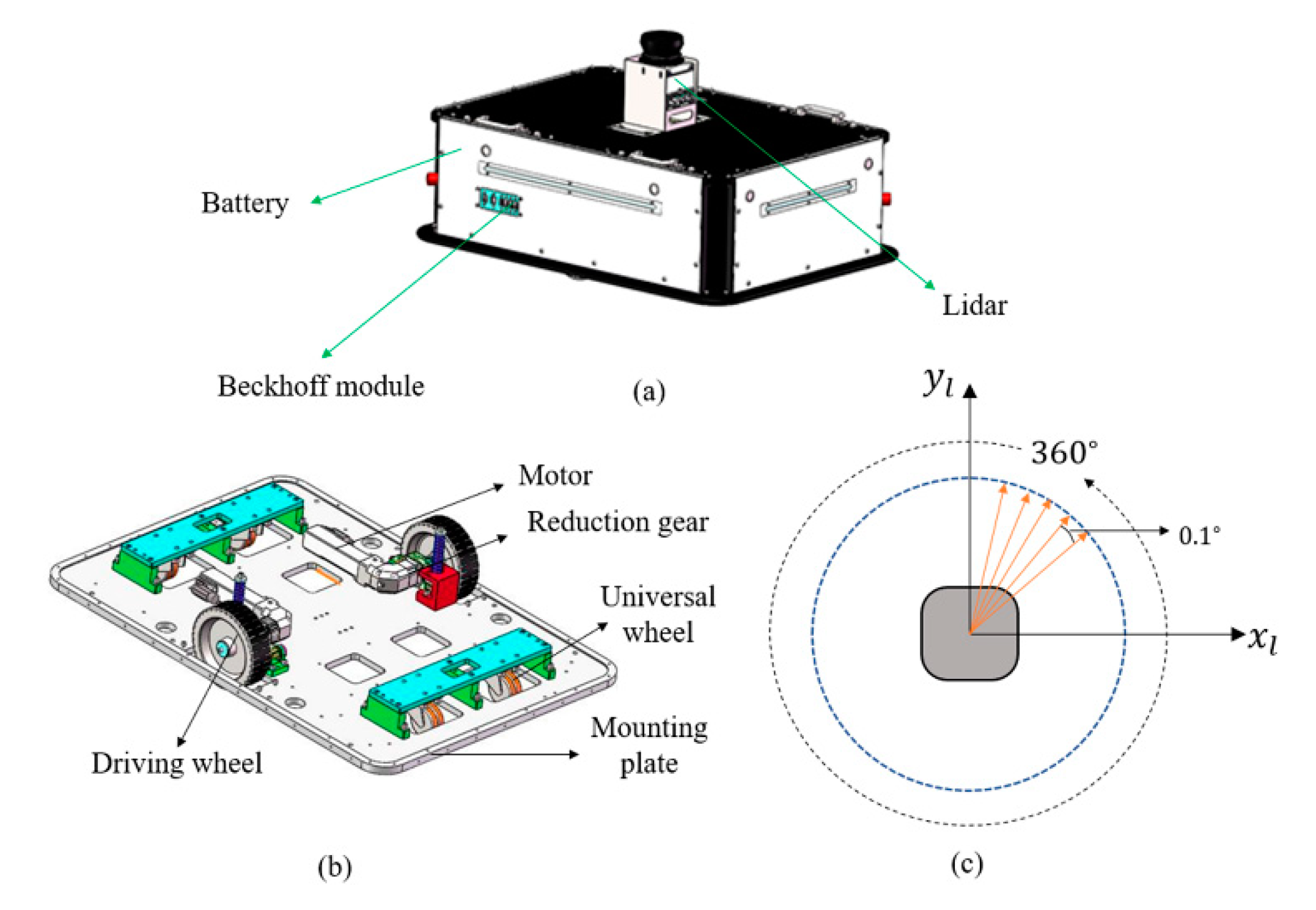
2.2. Robot Modeling
2.3. Construction of the Ongoing Scene for Mobile Robot
3. Localization of Mobile Robot in Ongoing Scene
3.1. Localization Based on Artificial Landmarks in an Ongoing Scene
3.1.1. Extraction of Artificial Landmarks
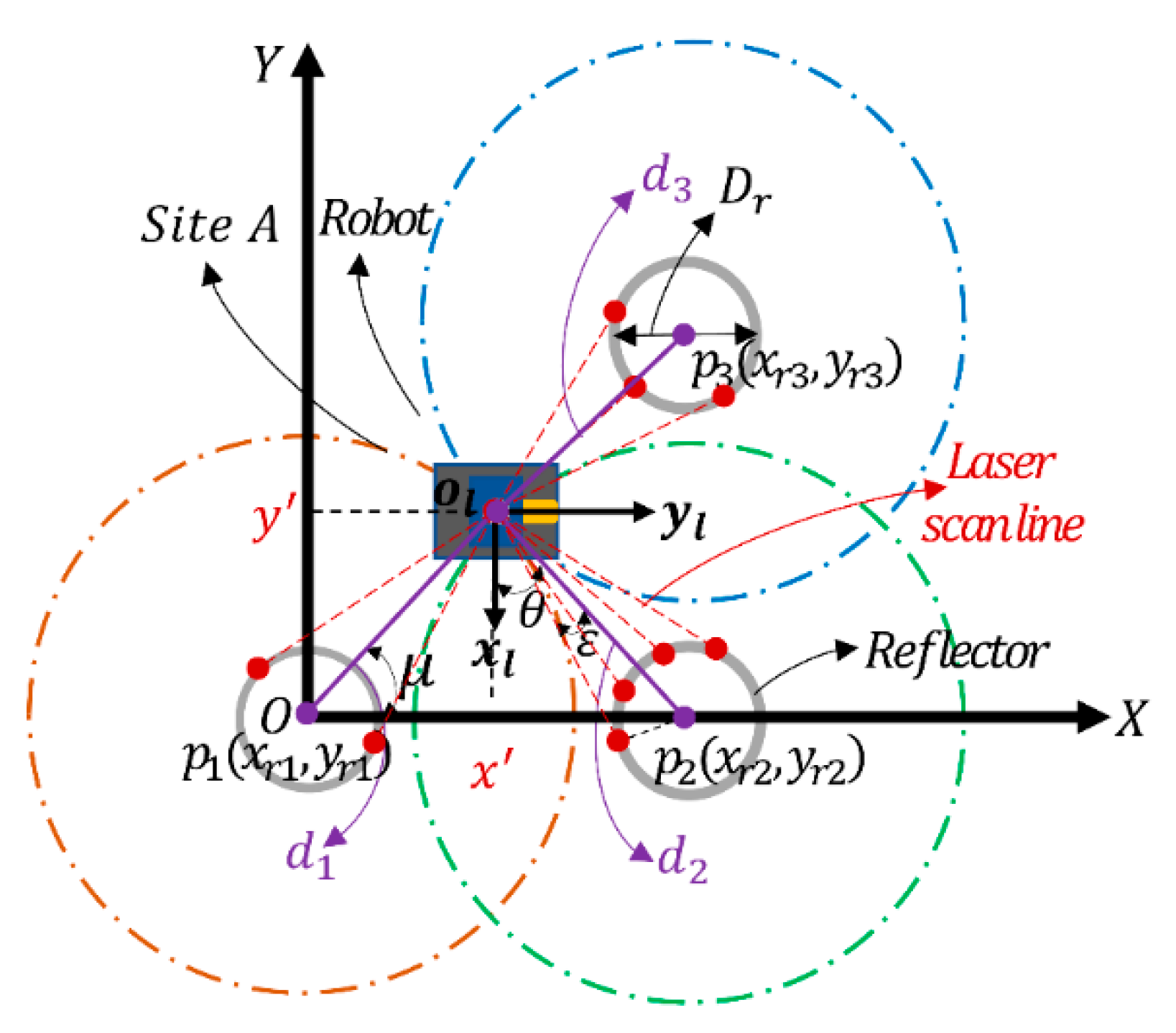
3.1.2. Localization of Ongoing Scene Based on Reflectors
3.2. Localization of Artificial Landmarks and Generated Buildings Based on Adaptive Weights
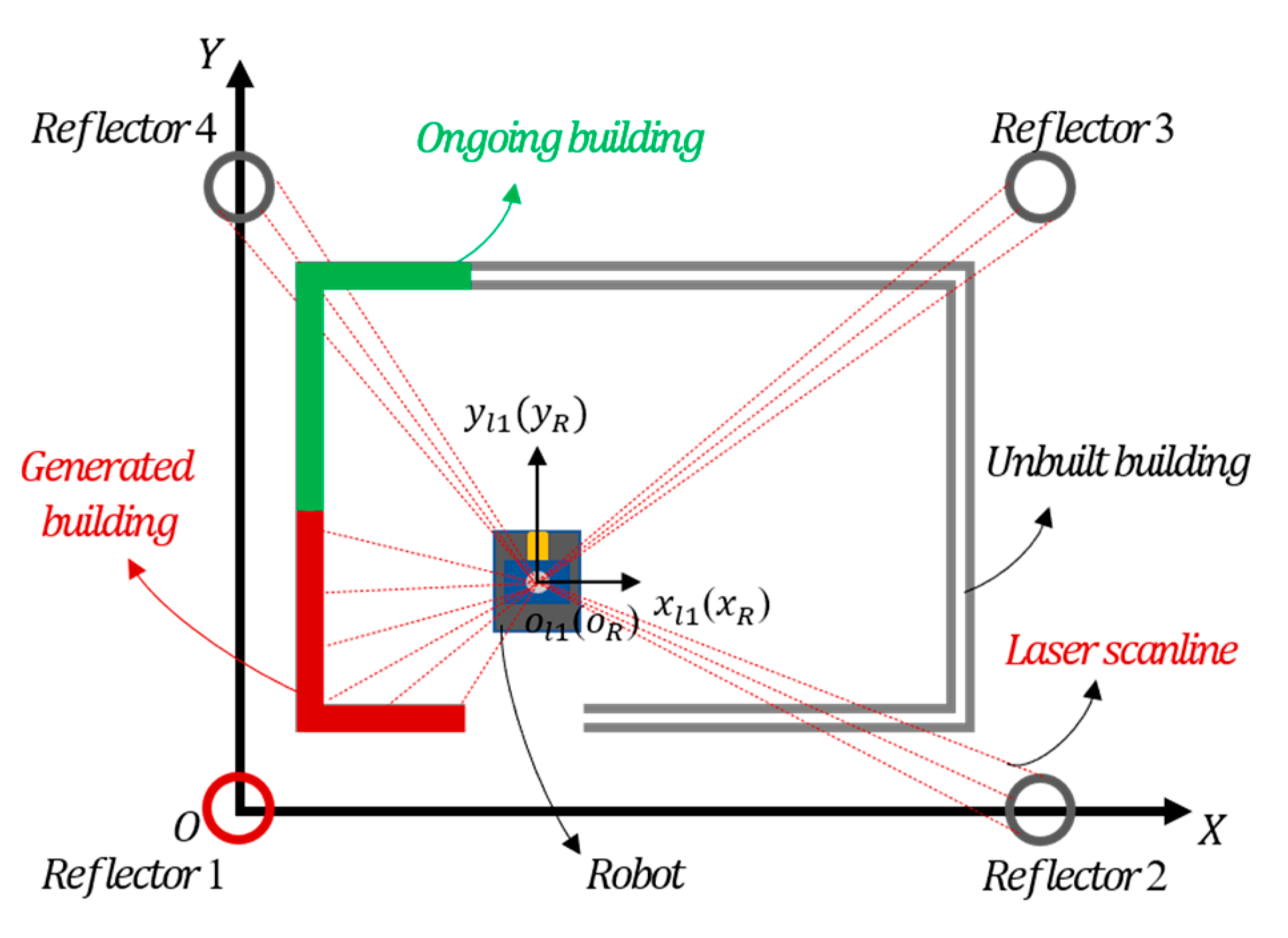
3.2.1. Frame of ICP Based on Generated Buildings
3.2.2. Robust Localization Based on Adaptive Weights
| Algorithm 1 Robust localization of mobile robot based on adaptive weighting factors |
| 1: Initialize the key parameters , , , 2: for the position in () do 3: 4: 5: 6: intensity threshold of point cloud , 7: while point cloud in horizontal scanline () of Lidar do 8: Calculate the distance by k nearest neighbors 9: 10: if 11: 12: end if 13: end while 14: 15: 16: 17: 18: 19: end for 20: return |
4. Experiments
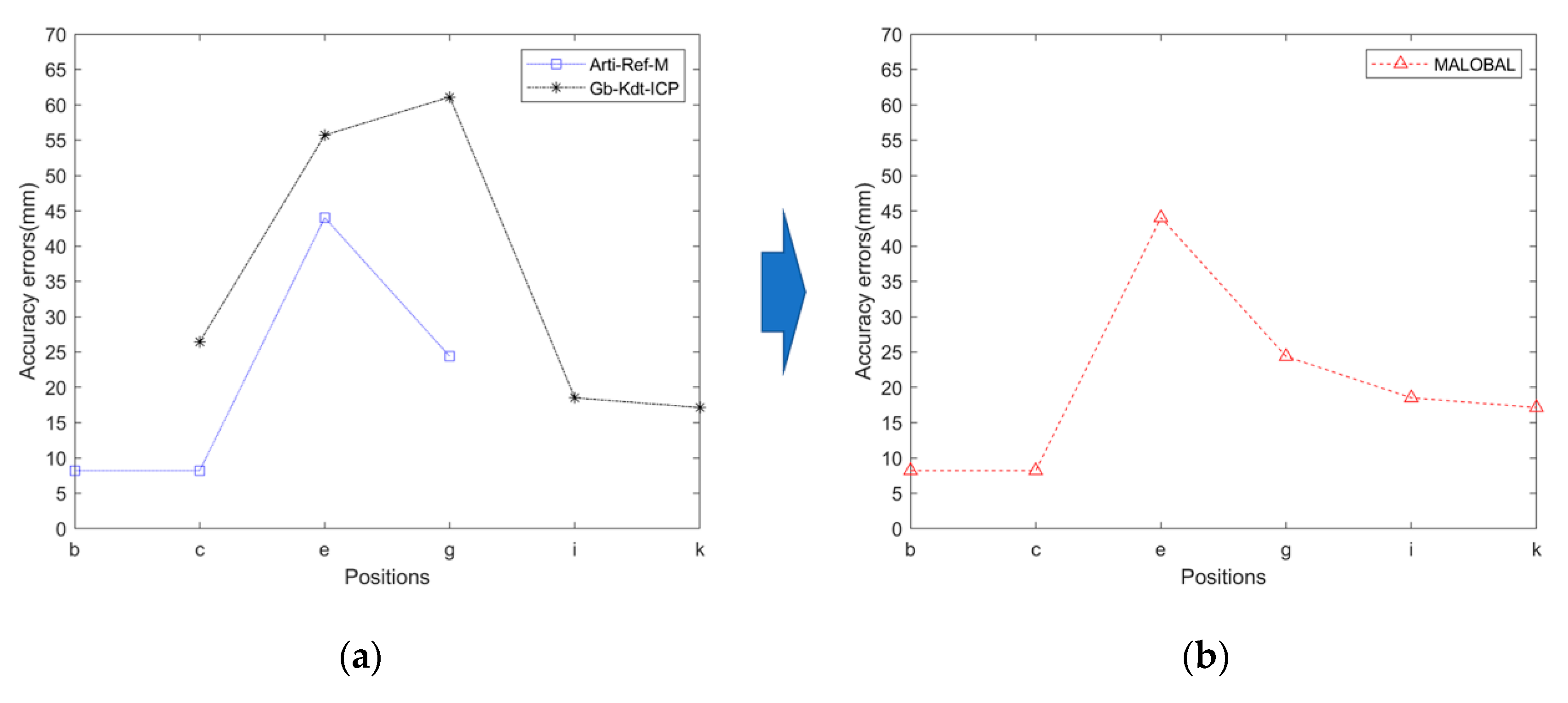
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ardiny, H.; Witwicki, S.; Mondada, F. Are Autonomous Mobile Robots Able to Take Over Construction? A Review. Int. J. Robot. Theor. Appl. 2015, 4, 10–21. [Google Scholar]
- Labonnote, N.; Rønnquist, A.; Manum, B.; Rüther, P. Additive construction: State-of-the-art, challenges and opportunities. Autom. Constr. 2016, 72, 347–366. [Google Scholar] [CrossRef]
- Dörfler, K.; Sandy, T.; Giftthaler, M.; Gramazio, F.; Kohler, M.; Buchli, J. Mobile robotic brickwork—Automation of a discrete robotic fabrication process using an autonomous mobile robot. In Robotic Fabrication in Architecture, Art and Design; Springer: New York, NY, USA, 2016; pp. 205–217. [Google Scholar]
- Helm, V.; Ercan, S.; Gramazio, F.; Kohler, M. Mobile robotic fabrication on construction sites: DimRob. In Proceedings of the 2012 IEEE/RSJ International Conference Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Gambao, E.; Balaguer, C. Robotics and Automation in Construction. IEEE Robot. Autom. Mag. 2002, 9, 4–6. [Google Scholar] [CrossRef]
- O’Brien, J.; Saidi, K.; Lytle, A. Robotics in construction. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Germany, 2008; pp. 1079–1099. [Google Scholar]
- Kundu, A.S.; Mazumder, O.; Dhar, A.; Lenka, P.K.; Bhaumik, S. Scanning Camera and Augmented Reality Based Localization of Omnidirectional Robot for Indoor Application. Proc. Comput. Sci. 2017, 105, 27–33. [Google Scholar] [CrossRef]
- Paijens, A.F.; Huang, L.; Al-Jumaily, A. Mobile robot positioning system for precision manufacturing: The laser lighthouse revisited. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017. [Google Scholar]
- Pierlot, V.; van Droogenbroeck, M. A New Three Object Triangulation Algorithm for Mobile Robot Positioning. IEEE Trans. Robot. 2014, 30, 566–577. [Google Scholar] [CrossRef] [Green Version]
- Pierlot, V.; van Droogenbroeck, M. BeAMS: A Beacon-Based Angle Measurement Sensor for Mobile Robot Positioning. IEEE Trans. Robot. 2014, 30, 533–549. [Google Scholar] [CrossRef] [Green Version]
- Easton, A.; Cameron, S. A Gaussian Error Model for Triangulation-Based Pose Estimation Using Noisy Landmarks. In Proceedings of the IEEE Conference on Robotics, Automation & Mechatronics, Bangkok, Thailand, 1–3 June 2006. [Google Scholar]
- Huang, Z.; Zhu, J.; Yang, L.; Xue, B.; Wu, J.; Zhao, Z. Accurate 3-D Position and Orientation Method for Indoor Mobile Robot Navigation Based on Photoelectric Scanning. IEEE Trans. Instrum. Meas. 2015, 64, 2518–2529. [Google Scholar] [CrossRef]
- Mao, J.; Hu, X.; Milford, M. An adaptive localization system for image storage and localization latency requirements. Robot. Auton. Syst. 2018, 107, 246–261. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Wang, J.; Wang, H. Active global localization based on localizability for mobile robots. Robotica 2015, 33, 1609–1627. [Google Scholar] [CrossRef]
- Pomárico-Franquiz, J.; Khan, S.H.; Shmaliy, Y.S. Combined extended FIR/Kalman filtering for indoor robot localization via triangulation. Measurement 2014, 50, 236–243. [Google Scholar] [CrossRef]
- Font-Llagunes, J.M.; Batlle, J.A. Consistent triangulation for mobile robot localization using discontinuous angular measurements. Robot. Auton. Syst. 2009, 57, 931–942. [Google Scholar] [CrossRef]
- Barczyk, M.; Bonnabel, S.; Deschaud, J.E.; Goulette, F. Invariant EKF Design for Scan Matching-aided Localization. IEEE Trans. Control Syst. Tech. 2015, 23, 2440–2448. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Yan, Z.X.; Song, T.; Xu, Z.; Zeng, L.D. Improvement of localization with artificial landmark for mobile manipulator. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419862985. [Google Scholar] [CrossRef] [Green Version]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Zhao, J.; Liu, J. A Survey of Simultaneous Localization and Mapping. arXiv 2019, arXiv:1909.05214. [Google Scholar]
- Besl, P.J.; Mckay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Jiang, G.; Yin, L.; Liu, G.; Xi, W.; Ou, Y. FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders. Appl. Sci. 2018, 9, 41. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.C.; Zhang, Q.; Ma, L.Y. A novel robust approach for SLAM of mobile robot. J. Cent. S. Univ. 2014, 21, 2208–2215. [Google Scholar] [CrossRef]
- Gutmann, J.S.; Schlegel, C. AMOS: Comparison of scan matching approaches for self-localization in indoor environments. In Proceedings of the First Euromicro Workshop on Advanced Mobile Robots (EUROBOT ‘96), Kaiserslautern, Germany, 9–11 October 1996. [Google Scholar]
- Weber, J.; Jörg, K.W.; Puttkamer, E.V. APR-Global Scan Matching Using Anchor Point Relationships. In Proceedings of the 6th International Conference Intelligent Autonomous Systems, Venice, Italy, 25–27 July 2000; pp. 471–478. [Google Scholar]
- Pfister, S.T.; Kriechbaum, K.L.; Roumeliotis, S.I.; Burdick, J.W. Weighted Range Sensor Matching Algorithms for Mobile Robot Displacement Estimation. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002. [Google Scholar]
- Minguez, J.; Lamiraux, F.; Montesano, L. Metric-Based Scan Matching Algorithms for Mobile Robot Displacement Estimation. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Lv, J.; Wang, Y.; Wu, K.; Dissanayake, G.; Kobayashi, Y.; Xiong, R. Planar scan matching using incident angle. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; p. 404. [Google Scholar]
- Diosi, A.; Kleeman, L. Laser scan matching in polar coordinates with application to SLAM. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3317–3322. [Google Scholar]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, p. 274. [Google Scholar]
- Ryu, K.; Dantanarayana, L.; Furukawa, T.; Dissanayake, G. Grid-based scan-to-map matching for accurate 2D map building. Adv. Robot. 2016, 30, 431–448. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Gui, H.; Luo, Z.; Li, D. Matching for navigation map building for automated guided robot based on laser navigation without a reflector. Ind. Robot Int. J. Robot. Res. Appl. 2019, 46, 17–30. [Google Scholar] [CrossRef]
- Röwekämper, J.; Sprunk, C.; Tipaldi, G.D.; Stachniss, C.; Pfaff, P.; Burgard, W. On the Position Accuracy of Mobile Robot Localization based on Particle Filters Combined with Scan Matching. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Sakin, M.; Kiroglu, Y.C. 3D Printing of Buildings: Construction of the Sustainable Houses of the Future by BIM. Energy Proc. 2017, 134, 702–711. [Google Scholar] [CrossRef]
- Turek, W.; Cetnarowicz, K.; Borkowski, A. On human-centric and robot-centric perspective of a building model ☆. Autom. Constr. 2017, 81, 2–16. [Google Scholar] [CrossRef]
- Lussi, M.; Sandy, T.; Doerfler, K.; Hack, N.; Gramazio, F.; Kohler, M.; Buchli, J. Accurate and Adaptive in Situ Fabrication of an Undulated Wall Using an on-Board Visual Sensing System. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Giftthaler, M.; Sandy, T.; Dörfler, K.; Brooks, I.; Buckingham, M.; Rey, G.; Kohler, M.; Gramazio, F.; Buchli, J. Mobile robotic fabrication at 1:1 scale: The In situ Fabricator. Constr. Robot. 2017, 1, 3–14. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| b | c | e | g | i | k | |
|---|---|---|---|---|---|---|
| x(mm) | 886 | 886 | 1118 | 1355 | 1355 | 1118 |
| y(mm) | 985 | 985 | 985 | 985 | 985 | 985 |
| θ(rad) | 2.41 | 0.84 | 0 | −0.94 | −2.51 | −3.14 |
| Local Point Clouds of Lidar | Global Matching Results | Global Matching Errors | |
|---|---|---|---|
| b–c |  |  |  |
| d–e |  |  |  |
| f–g |  |  |  |
| h–i |  |  |  |
| j–k |  |  |  |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Guo, S.; Song, T.; Zeng, L. Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene. Appl. Sci. 2020, 10, 6152. https://doi.org/10.3390/app10186152
Xu Z, Guo S, Song T, Zeng L. Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene. Applied Sciences. 2020; 10(18):6152. https://doi.org/10.3390/app10186152
Chicago/Turabian StyleXu, Zhen, Shuai Guo, Tao Song, and Lingdong Zeng. 2020. "Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene" Applied Sciences 10, no. 18: 6152. https://doi.org/10.3390/app10186152
APA StyleXu, Z., Guo, S., Song, T., & Zeng, L. (2020). Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene. Applied Sciences, 10(18), 6152. https://doi.org/10.3390/app10186152