Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
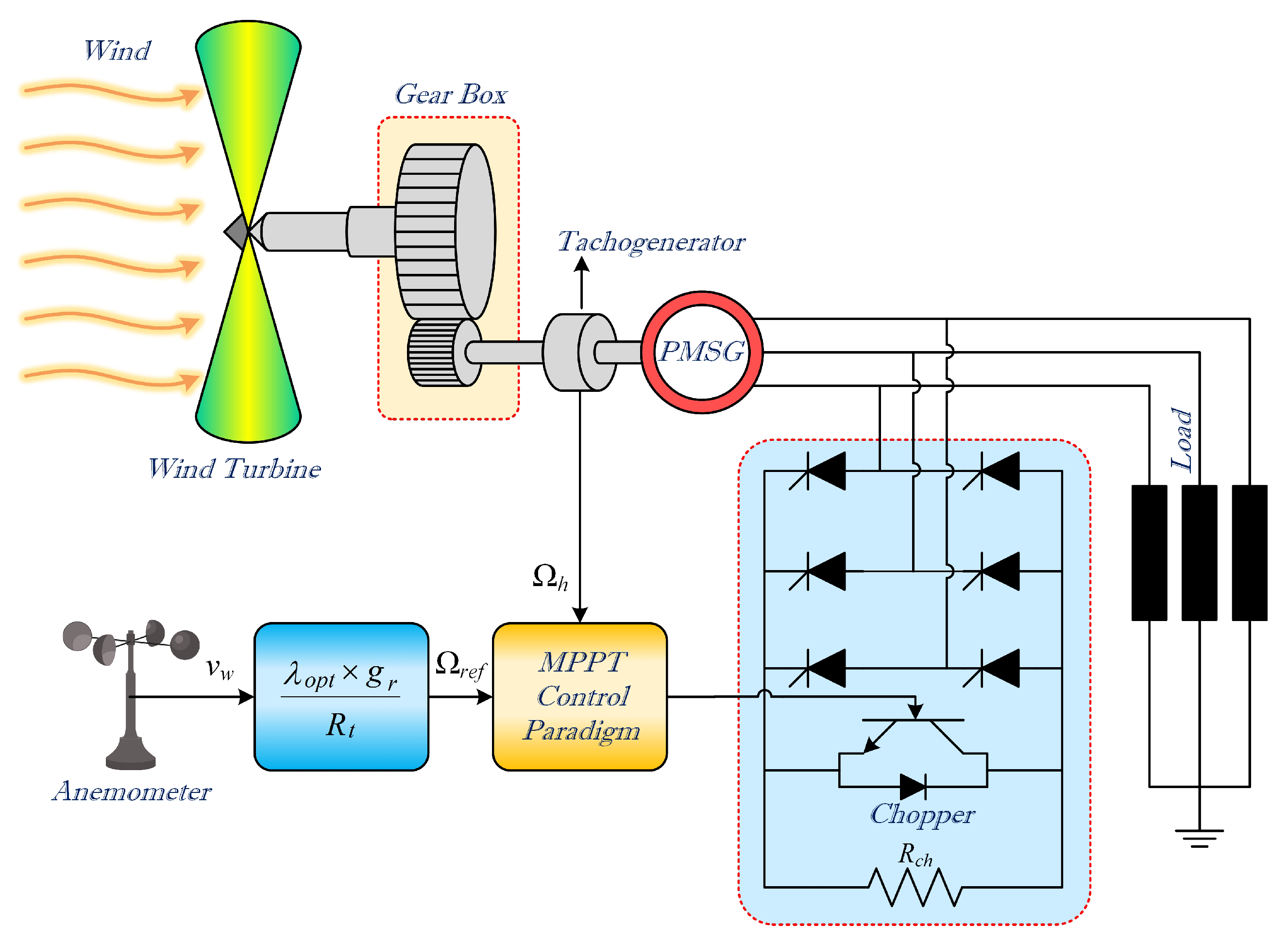
2. Mathematical Modeling of PMSG–WECS
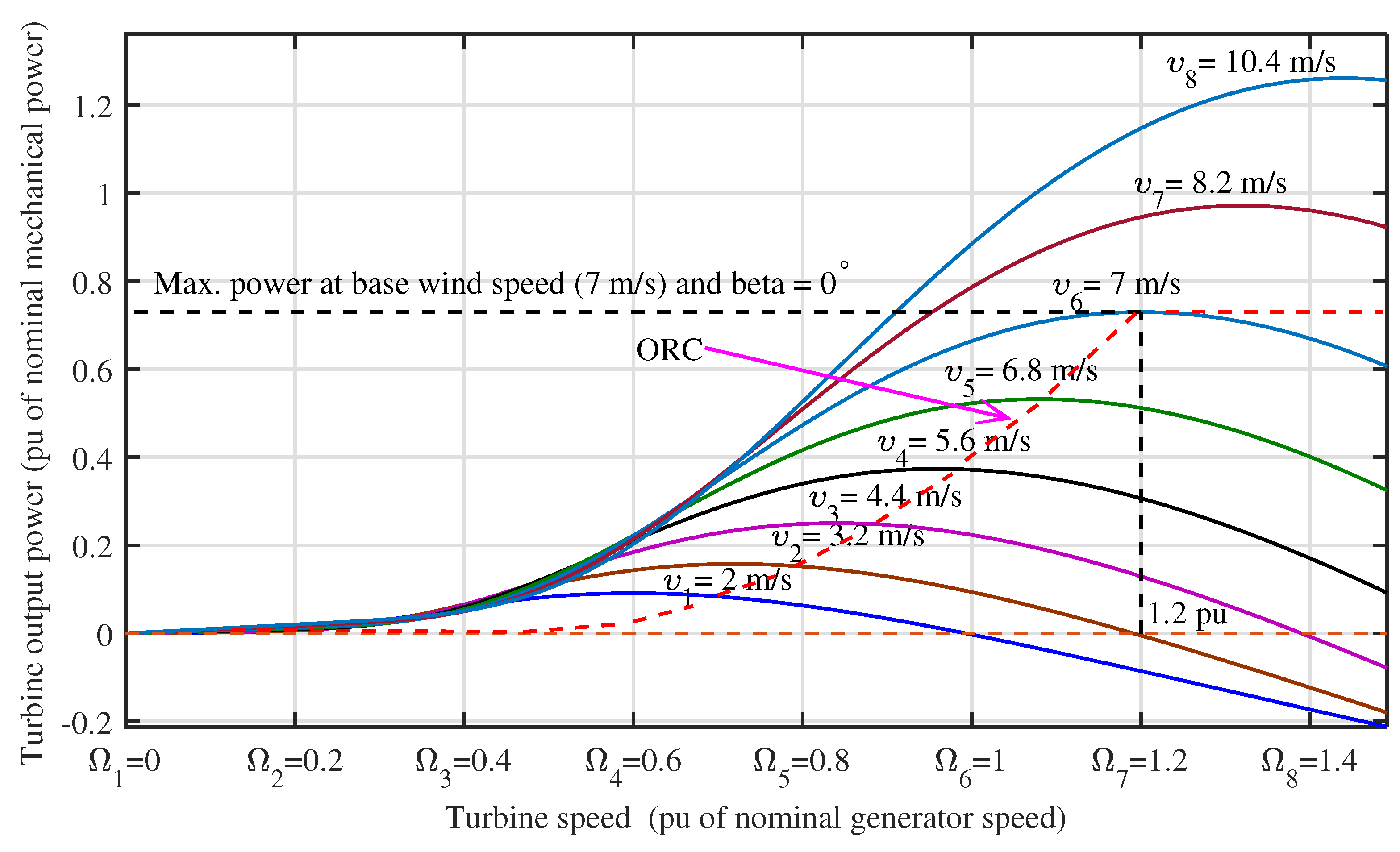
2.1. Wind Turbine Mathematical Modeling
2.2. Permanent Magnet Synchronous Generator Mathematical Modeling
3. Coordinates Transformation
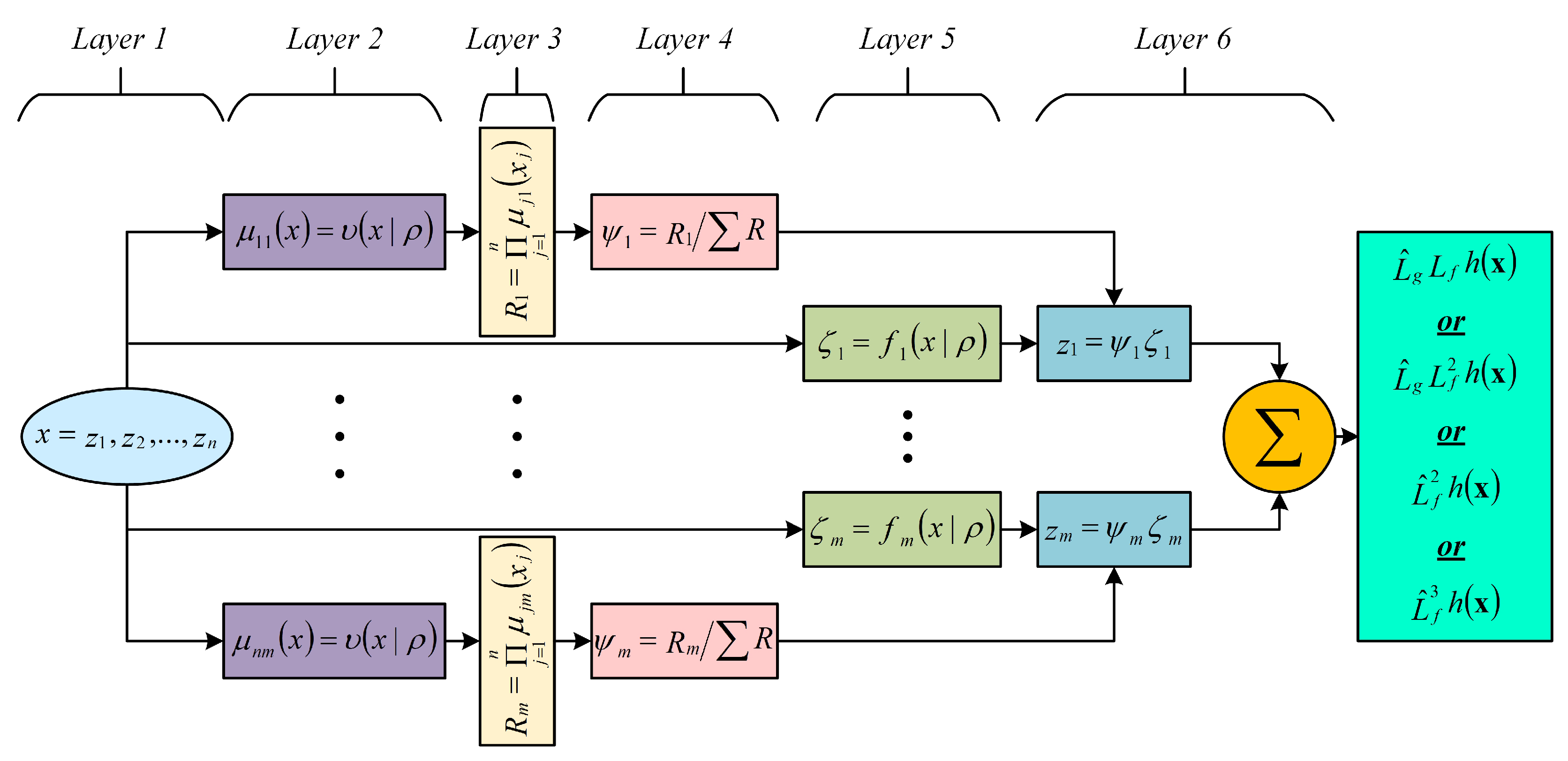
4. Lie Derivatives Estimation via Adaptive Neuro-Fuzzy Inference System
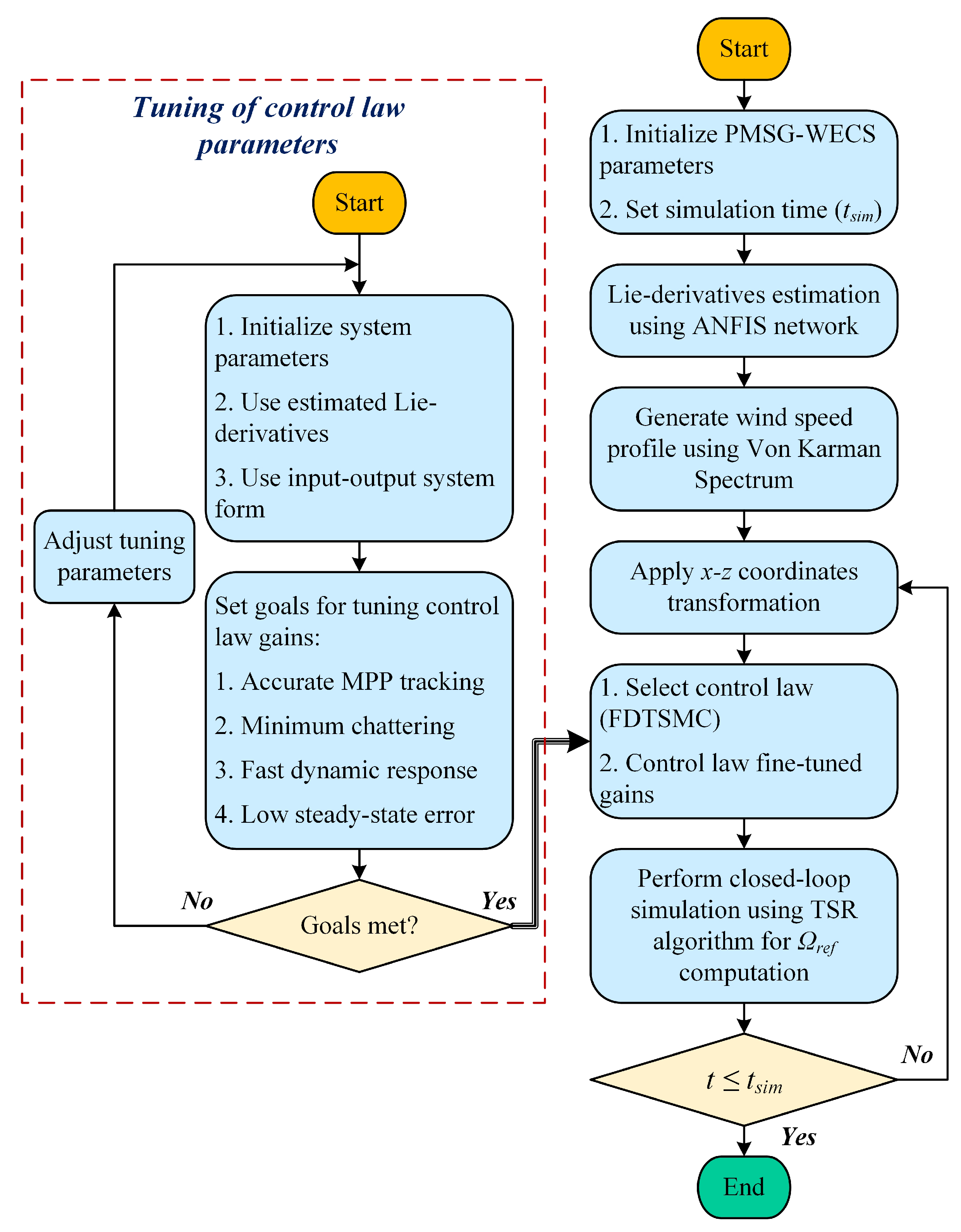
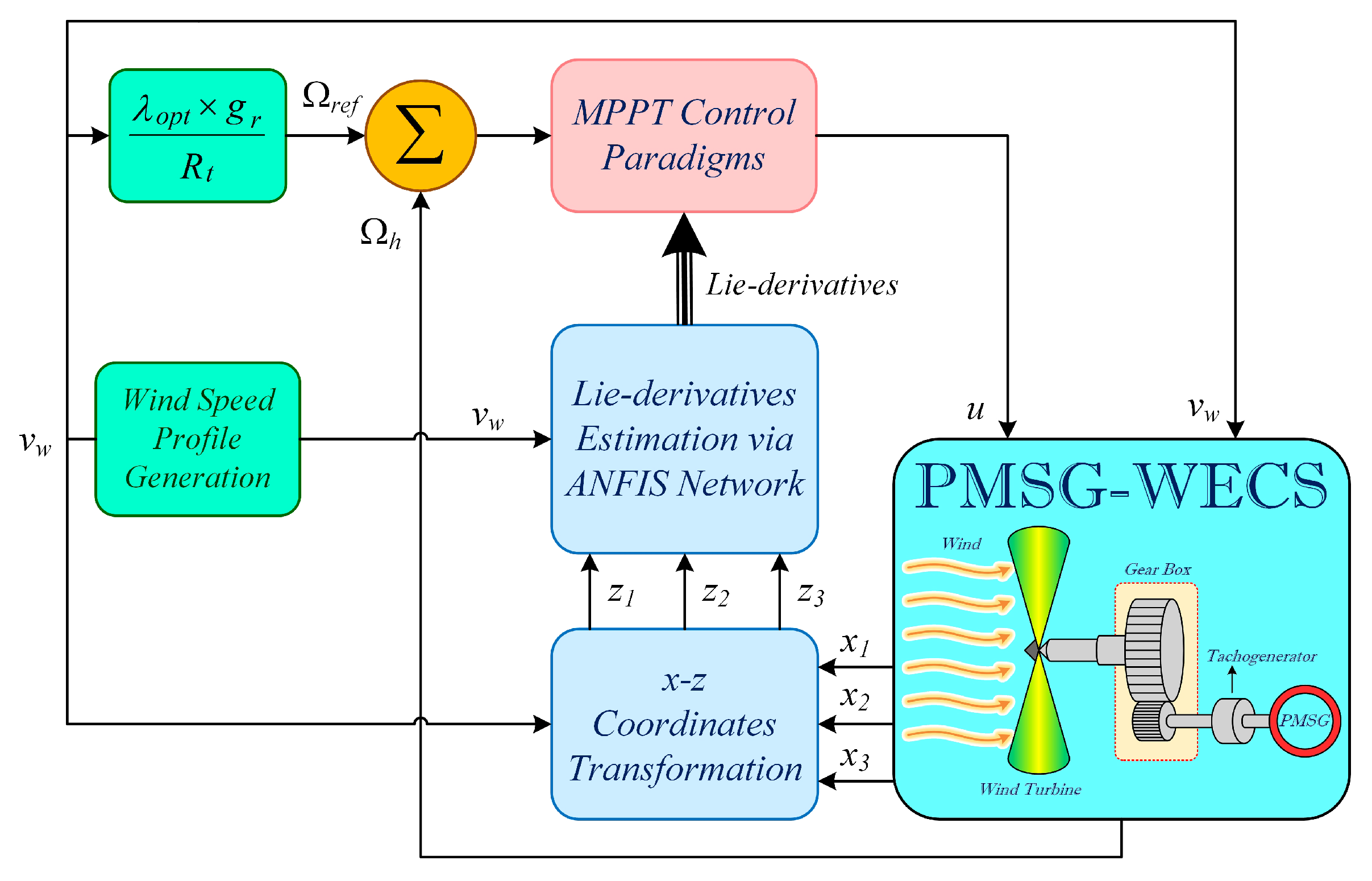
5. MPPT Control Design for PMSG–WECS
FDTSMC-Based MPPT Control Design for PMSG–WECS
6. Stability Analysis
Stability Analysis for FDTSMC
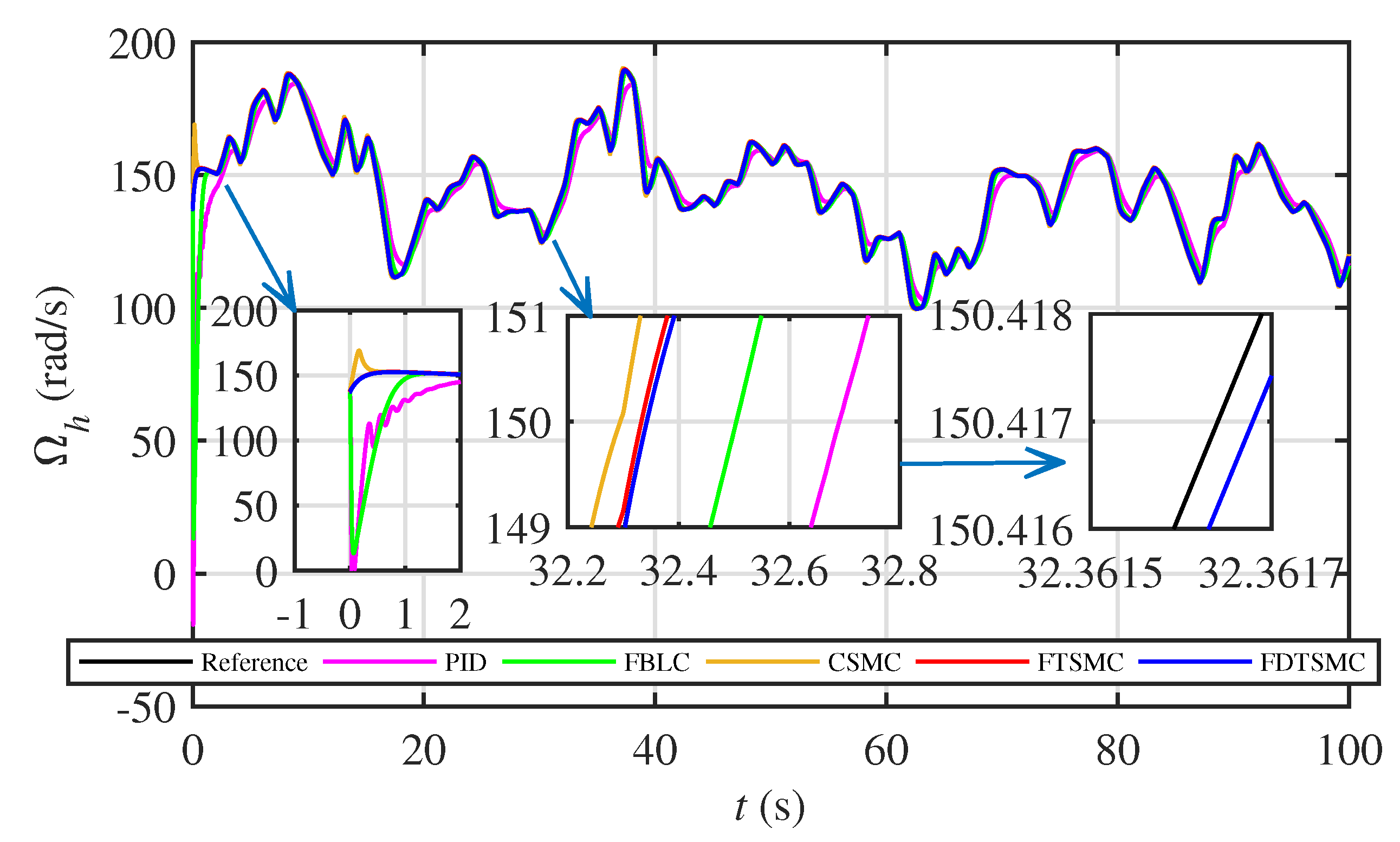
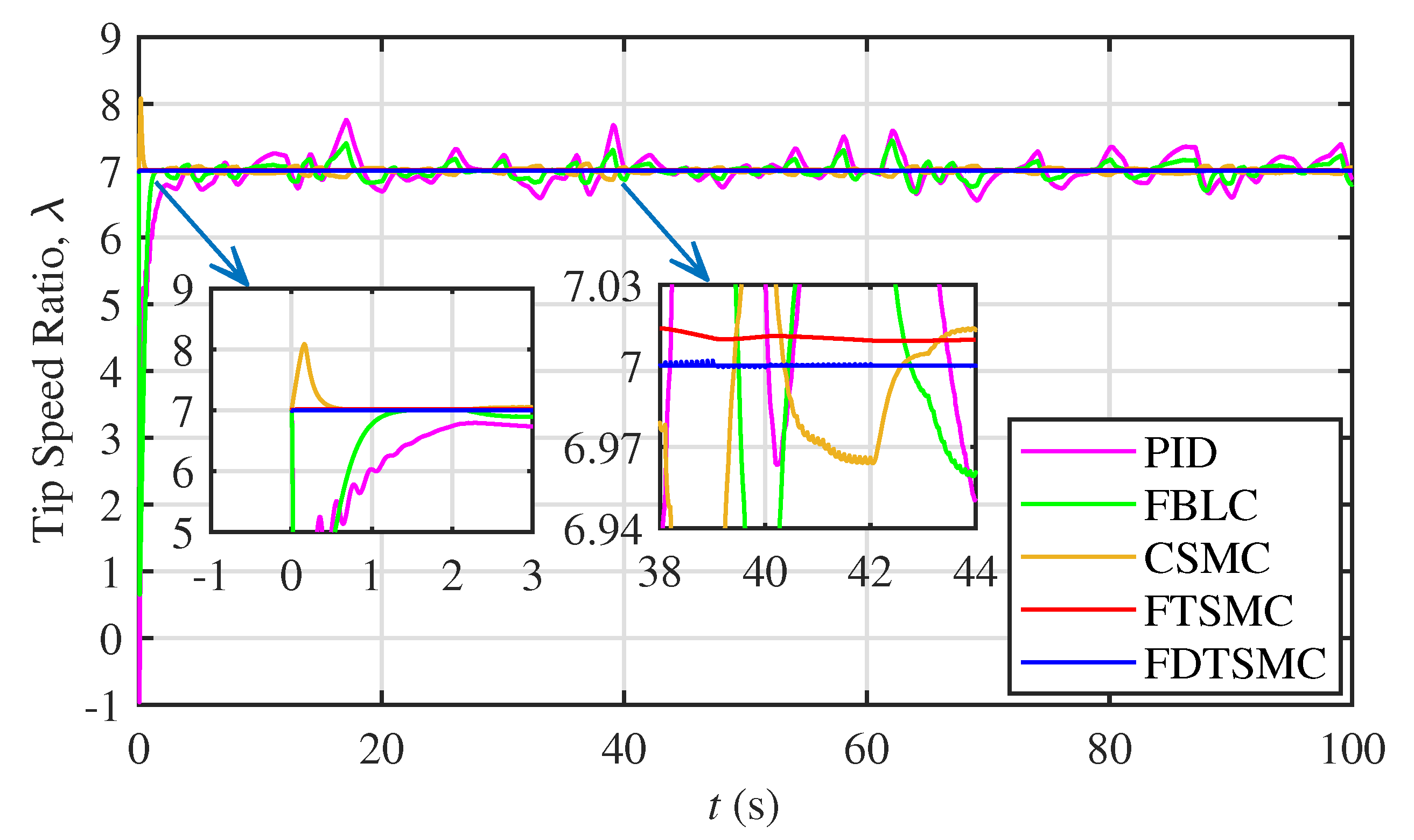
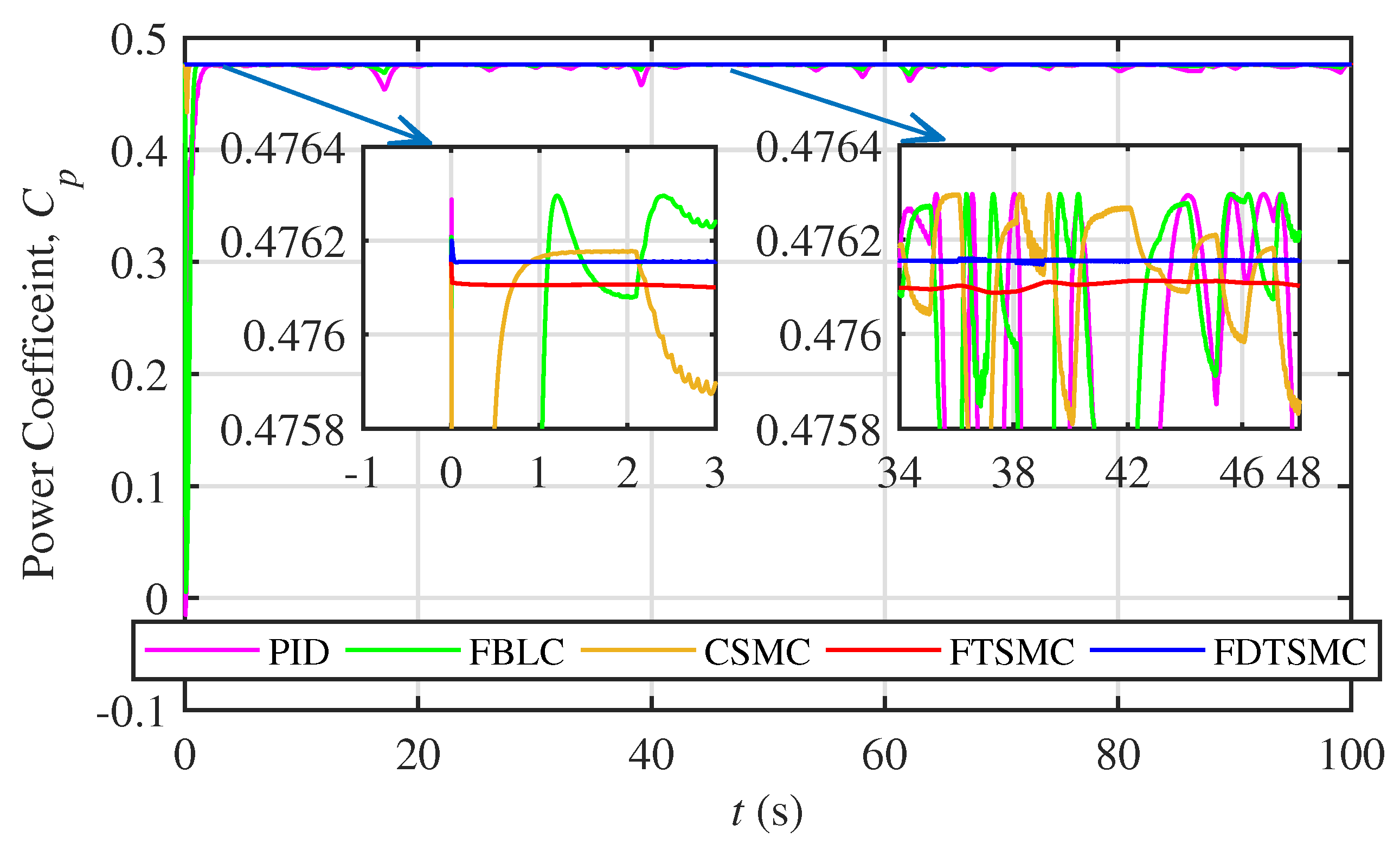
7. Simulation Results and Discussion
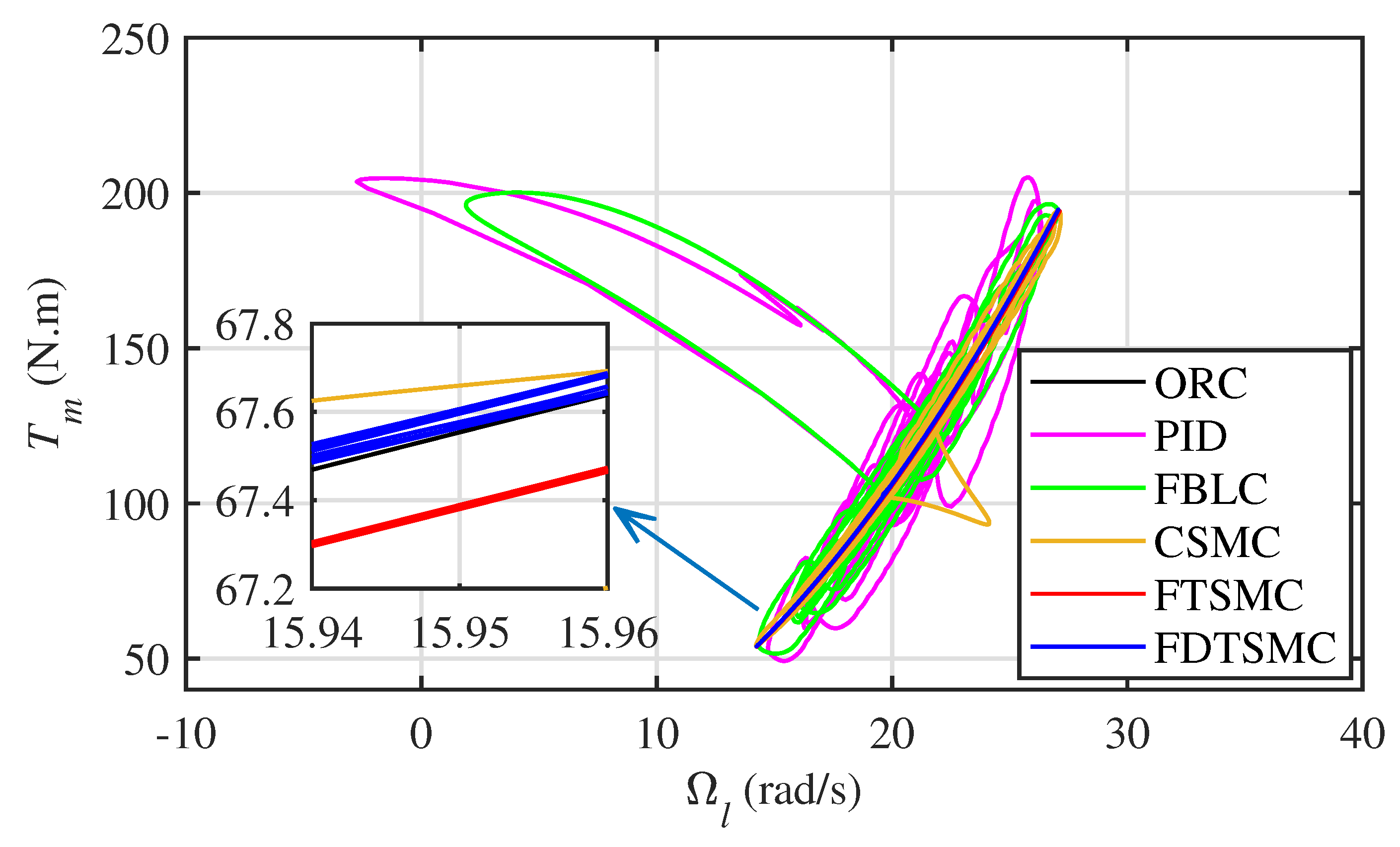
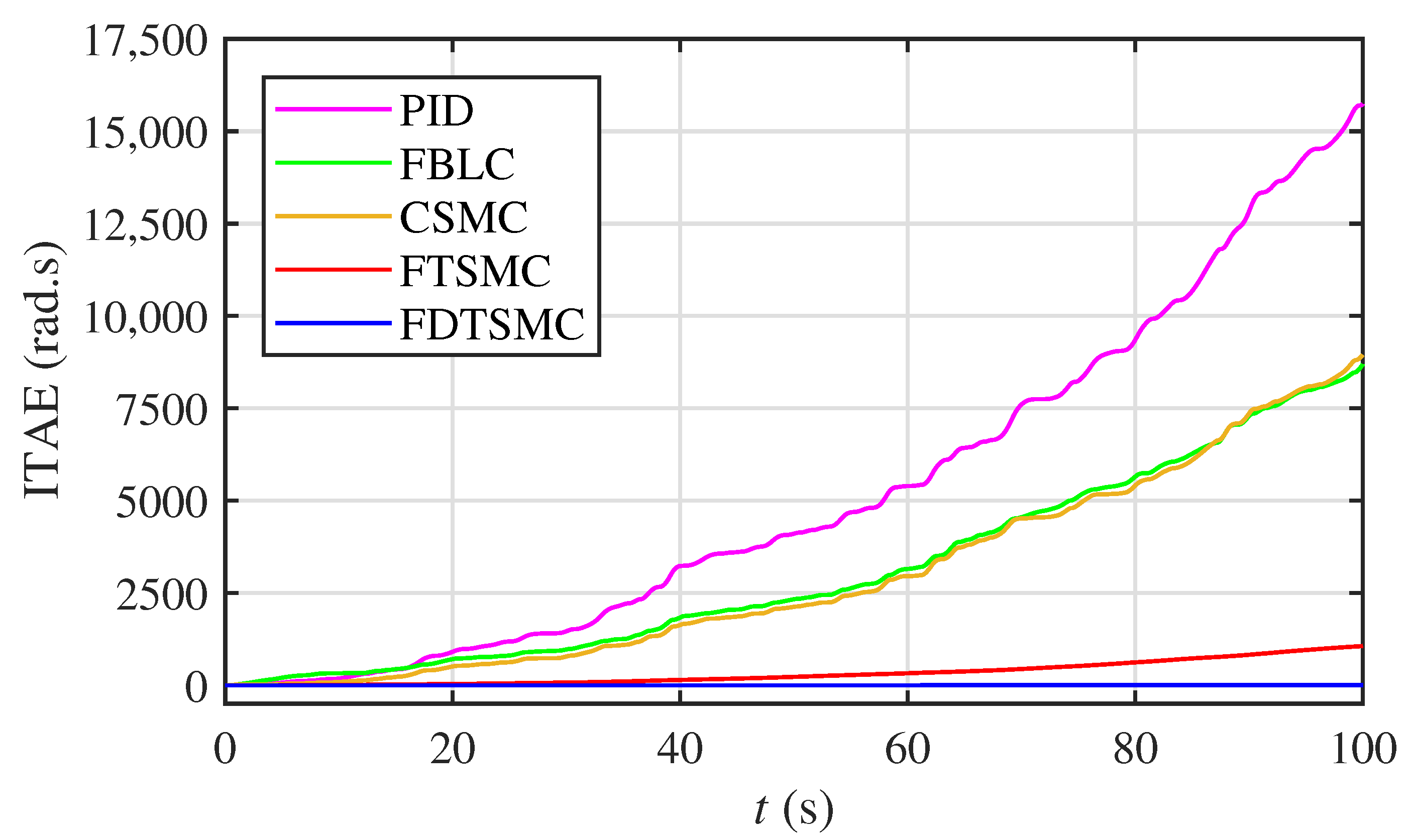
7.1. Performance Evaluation under Stochastic Wind Speed Profile
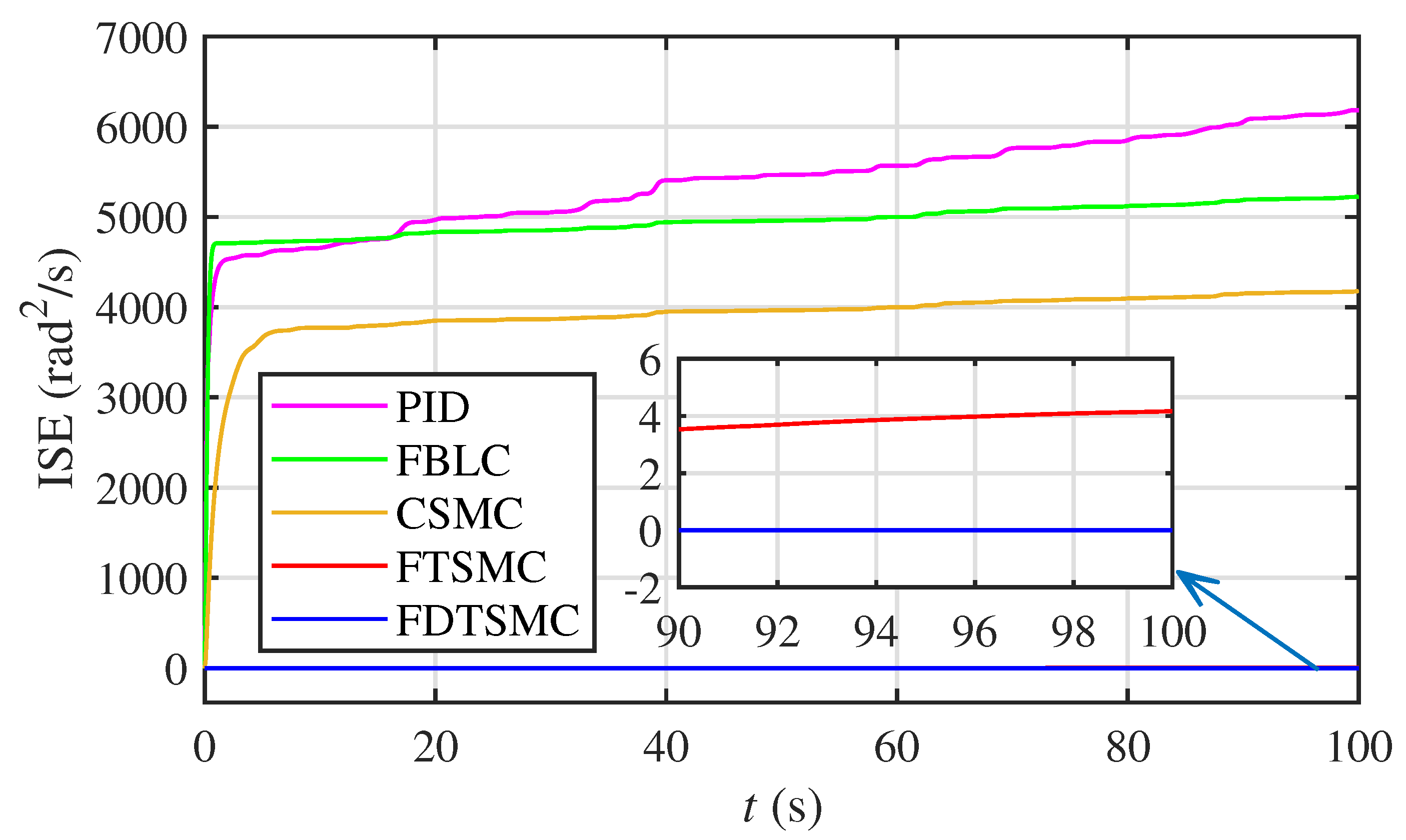
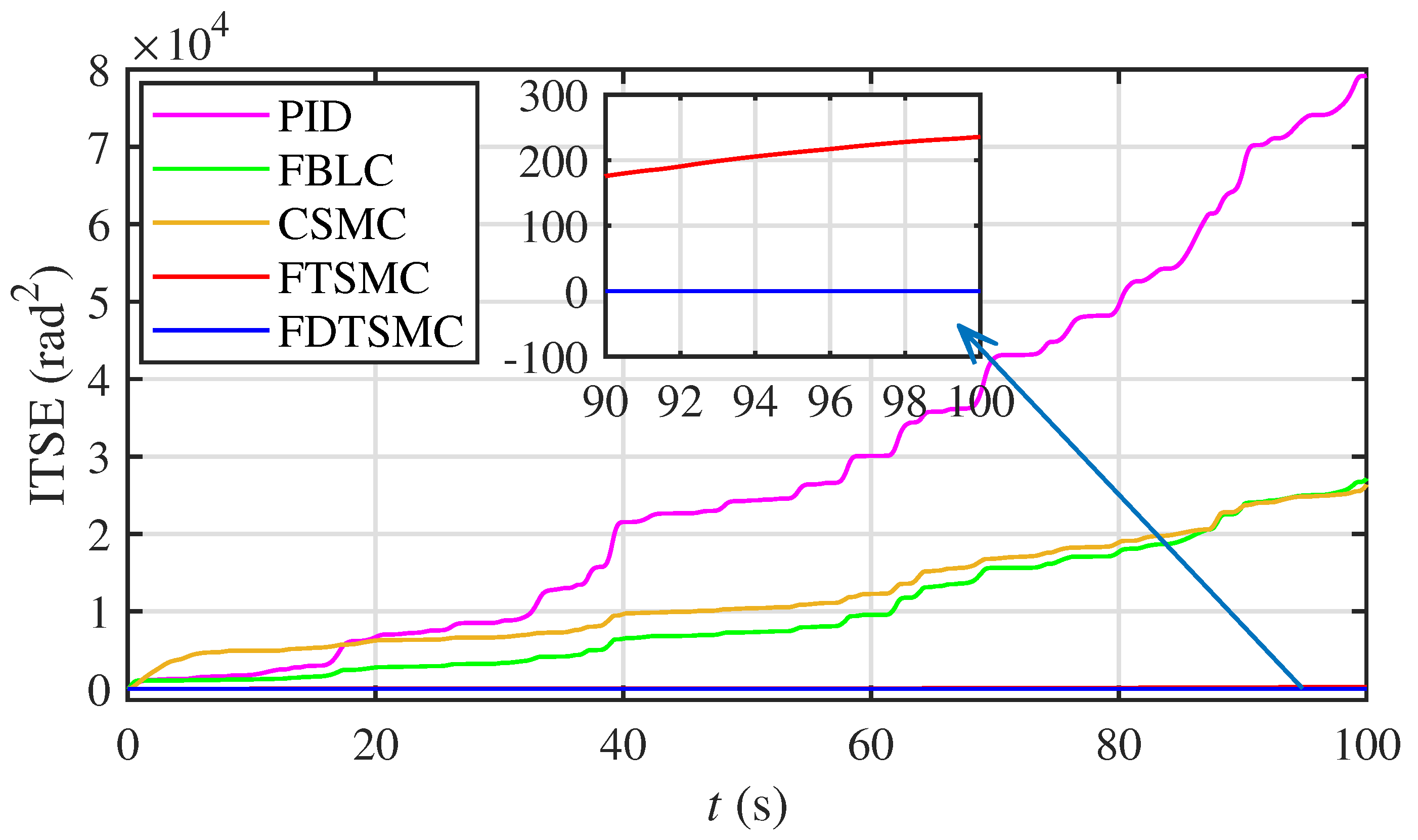
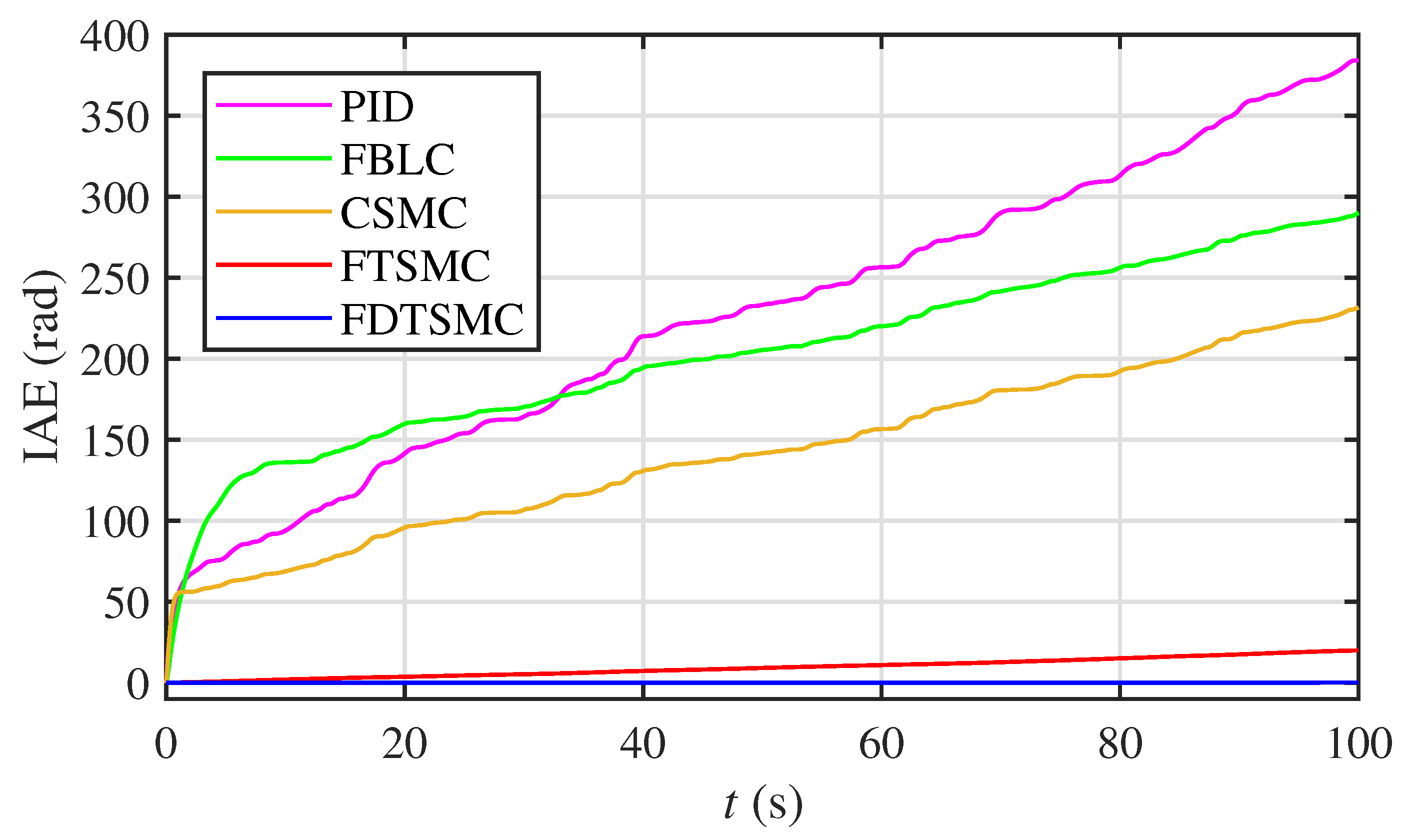
7.2. Performance Indices
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Soliman, M.A.; Hasanien, H.M.; Azazi, H.Z.; El-Kholy, E.E.; Mahmoud, S.A. Linear-quadratic regulator algorithm-based cascaded control scheme for performance enhancement of a variable-speed wind energy conversion system. Arab. J. Sci. Eng. 2019, 44, 2281–2293. [Google Scholar] [CrossRef]
- Worku, M.Y.; Abido, M.A. Fault Ride-Through and Power Smoothing Control of PMSG-Based Wind Generation Using Supercapacitor Energy Storage System. Arab. J. Sci. Eng. 2019, 44, 2067–2078. [Google Scholar] [CrossRef]
- Tahir, K.; Belfedal, C.; Allaoui, T.; Denai, M.; Doumi, M.H. A new sliding mode control strategy for variable-speed wind turbine power maximization. Int. Trans. Electr. Energy Syst. 2018, 28, e2513. [Google Scholar] [CrossRef] [Green Version]
- Housseini, B.; Okou, A.F.; Beguenane, R. Performance comparison of variable speed PMSG-based wind energy conversion system control algorithms. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 11–13 April 2017; pp. 1–10. [Google Scholar]
- Yaramasu, V.; Dekka, A.; Durán, M.J.; Kouro, S.; Wu, B. PMSG-based wind energy conversion systems: Survey on power converters and controls. IET Electr. Power Appl. 2017, 11, 956–968. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IET Electr. Power Appl. 2006, 21, 130–135. [Google Scholar] [CrossRef] [Green Version]
- Munteanu, I.; Bacha, S.; Bratcu, A.I.; Guiraud, J.; Roye, D. Energy-reliability optimization of wind energy conversion systems by sliding mode control. IEEE Trans. Energy Convers. 2008, 23, 975–985. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Sun, F. A novel dynamic terminal sliding mode control of uncertain nonlinear systems. J. Control Theoryand Appl. 2007, 5, 189–193. [Google Scholar] [CrossRef]
- Khan, I.U.; Khan, L.; Khan, Q.; Ullah, S.; Khan, U.; Ahmad, S. Neuro-Adaptive Backstepping Integral Sliding Mode Control Design for Nonlinear Wind Energy Conversion System. Turk. J. Electr. Eng. Comput. Sci. 2020, in press. [Google Scholar] [CrossRef]
- Yazici, İ.; Yaylaci, E.K. Maximum power point tracking for the permanent magnet synchronous generator-based WECS by using the discrete-time integral sliding mode controller with a chattering-free reaching law. IET Power Electron. 2017, 10, 1751–1758. [Google Scholar] [CrossRef]
- Yin, X.X.; Lin, Y.G.; Li, W.; Liu, H.W.; Gu, Y.J. Fuzzy-logic sliding-mode control strategy for extracting maximum wind power. IEEE Trans. Energy Convers. 2015, 30, 1267–1278. [Google Scholar] [CrossRef]
- Dursun, E.H.; Kulaksiz, A.A. Second-order sliding mode voltage-regulator for improving MPPT efficiency of PMSG-based WECS. Int. J. Electr. Power Energy Syst. 2020, 121, 106149. [Google Scholar] [CrossRef]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef]
- El Mourabit, Y.; Derouich, A.; El Ghzizal, A.; El Ouanjli, N.; Zamzoum, O. Nonlinear backstepping control for PMSG wind turbine used on the real wind profile of the Dakhla-Morocco city. Int. Trans. Electr. Energy Syst. 2020, 30, e12297. [Google Scholar] [CrossRef]
- Munteanu, I.; Bratcu, A.I.; Cutululis, N.A.; Ceangǎ, E. Optimal Control of Wind Energy Systems: Towards a Global Approach; Springer: London, UK, 2008. [Google Scholar]
- Cutululis, N.A.; Ceangǎ, E.; Hansen, A.D.; Sørensen, P. Robust multi-model control of an autonomous wind power system. Wind Energy 2006, 9, 399–419. [Google Scholar] [CrossRef]
- Cheikh, R.; Menacer, A.; Alaoui, L.C.; Drid, S. Robust nonlinear control via feedback linearization and Lyapunov theory for permanent magnet synchronous generator-based wind energy conversion system. Front. Energy 2020, 14, 180–191. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Marquez, H.J. Nonlinear Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Lau, C.K.; Ghosh, K.; Hussain, M.A.; Hassan, C.C. Fault diagnosis of Tennessee Eastman process with multi-scale PCA and ANFIS. Chemom. Intell. Lab. Syst. 2013, 120, 1–14. [Google Scholar] [CrossRef]
- Zhihong, M.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2464–2469. [Google Scholar] [CrossRef]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Ziong, J.J.; Zhang, G.B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar]
- Dursun, E.H.; Kulaksiz, A.A. Second-Order Fast Terminal Sliding Mode Control for MPPT of PMSG-based Wind Energy Conversion System. Elektron. Elektrotech. 2020, 26, 39–45. [Google Scholar] [CrossRef]
- Soufi, Y.; Kahla, S.; Bechouatb, M. Feedback linearization control based particle swarm optimization for maximum power point tracking of wind turbine equipped by PMSG connected to the grid. Int. J. Hydrogen Energy 2016, 41, 20950–20955. [Google Scholar] [CrossRef]
- Sahib, M.A.; Ahmed, B.S. A new multiobjective performance criterion used in PID tuning optimization algorithms. J. Adv. Res. 2016, 7, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Ali, K.; Khan, Q.; Ullah, S.; Khan, I.; Khan, L. Nonlinear robust integral backstepping based MPPT control for stand-alone photovoltaic system. PLoS ONE 2020, 15, e0231749. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Quantity | Value |
|---|---|---|
| Wind Turbine | Air density (at 10 , at sea level), | /m |
| Turbine blade radius, | ||
| Transmission (or gear) ratio, | 7 | |
| Average wind speed, | 7 / | |
| Optimal tip speed ratio, | 7 | |
| Maximum power conversion coefficient, | 0.4762 | |
| PMSG | Stator resistance, | 3.30 |
| Stator d-axis inductance, | ||
| Stator q-axis inductance, | ||
| Magnetic flux, | ||
| Pole pairs, p | 3 | |
| High-speed shaft moment of inertia, | ||
| Load inductance, | ||
| FDTSMC | Gain, | 3 |
| Gain, | 1 | |
| Gain, | 100 | |
| Gain, | 7000 | |
| Gain, | 200 | |
| Gain, | 4000 | |
| Gain, | 0.1 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 0.1215 | −6 | 2.6292 | |||
| −27.1471 | 21.6288 | 9.9399 | |||
| −0.9486 | 3.8422 | −0.13316 | |||
| 0.1215 | −0.3603 | ||||
| −27.1471 | −0.0958 | 2.6292 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zafran, M.; Khan, L.; Khan, Q.; Ullah, S.; Sami, I.; Ro, J.-S. Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System. Appl. Sci. 2020, 10, 6361. https://doi.org/10.3390/app10186361
Zafran M, Khan L, Khan Q, Ullah S, Sami I, Ro J-S. Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System. Applied Sciences. 2020; 10(18):6361. https://doi.org/10.3390/app10186361
Chicago/Turabian StyleZafran, Muhammad, Laiq Khan, Qudrat Khan, Shafaat Ullah, Irfan Sami, and Jong-Suk Ro. 2020. "Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System" Applied Sciences 10, no. 18: 6361. https://doi.org/10.3390/app10186361
APA StyleZafran, M., Khan, L., Khan, Q., Ullah, S., Sami, I., & Ro, J. -S. (2020). Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System. Applied Sciences, 10(18), 6361. https://doi.org/10.3390/app10186361