1. Introduction
Safety-critical systems are ubiquitous in our everyday life, from medical equipment and smart vehicles to military applications. These types of systems usually imply, on the one hand, a real-time response due to direct interaction with the environment and, on the other hand, the inclusion of several critical functionalities. Providing a real-time response while carefully managing resources and providing temporal and spatial isolation for the critical applications imposes the need for carefully tailored real-time scheduling approaches.
In a special category of safety-critical applications which run in a time-triggered environment, perfectly periodical (i.e., jitterless) scheduling for certain critical tasks is needed. This need can appear from message synchronization problems [
1], from signal processing applications [
2,
3,
4,
5], or simply from conditions imposed by different types of certifications [
6]. Moreover, jitterless execution is desired for certain tasks in any embedded control system, as jitter only introduces difficulties in control loops [
6]. As stated in [
7], computer-controlled systems are designed assuming periodical sampling and zero or negligible jitter. In practice, the only jitter that can be relatively easily eliminated is sampling jitter, by using dedicated hardware. Input–output jitter is influenced by the scheduling policy. Guaranteeing the performance and stability of the controller in target systems also implies, besides a bounded response time, a guarantee that the input–output jitter is bounded within a so-called jitter margin [
7].
Dealing with task execution in a time-triggered environment for classical real-time systems is done using time-triggered (clock-driven) scheduling techniques, among which the static table-driven approach stands out.
The table-driven approach is based on static schedulability analysis, generating a scheduling table that is used at run time to decide the moment when each task instance (also called a job) must begin its execution [
8]. A special case of real-time systems is represented by the mixed criticality systems (MCSs), where tasks with different criticalities, categorized based on a finite set of criticality levels, share the same hardware [
9]. The system is considered to run in a number of criticality modes, each mode giving a certain degree of execution time assurance [
9].
While the classical real-time approach implies the construction of a single scheduling table, in MCSs, things become more complex due to the number of criticality modes. The change from one criticality mode to another corresponds to a transition from one precomputed scheduling table to another. Thus, in MCSs, there is one scheduling table per criticality level [
10].
MCSs are a suitable variant that can be used with respect to providing a real-time response, while isolating the critical functionalities. If we analyze safety-critical systems in the case of MCSs, there are certain advantages of such table-driven approaches over event-driven scheduling: easier certification, given by the fact that table-driven schedulers are completely deterministic [
10]; easier synchronization between tasks [
1]; easier power management, as each power-mode corresponds to a criticality level, and each level uses its own table; and easier adaptation of real-time applications from different fields like automotive, avionics, etc., which already use table-driven approaches [
11].
In this paper we propose an adaptation of a real-time, table-driven, non-preemptive scheduling method for MCSs which guarantees jitterless execution in a mixed criticality time-triggered environment for both uniprocessor and homogenous multiprocessor systems. We also provide a partitioning heuristic for this scheduling method for multiprocessor systems.
The main contributions of this paper are as follows:
A mixed criticality scheduling algorithm, FENP_MC (Fixed Execution Non-Preemptive Mixed Criticality), is proposed for jitterless task execution in a time-triggered environment;
An adaptation of the FENP_MC for homogenous multiprocessor systems, P_FENP_MC, is provided;
Feasibility tests are proposed for both uniprocessor and homogenous multiprocessor systems;
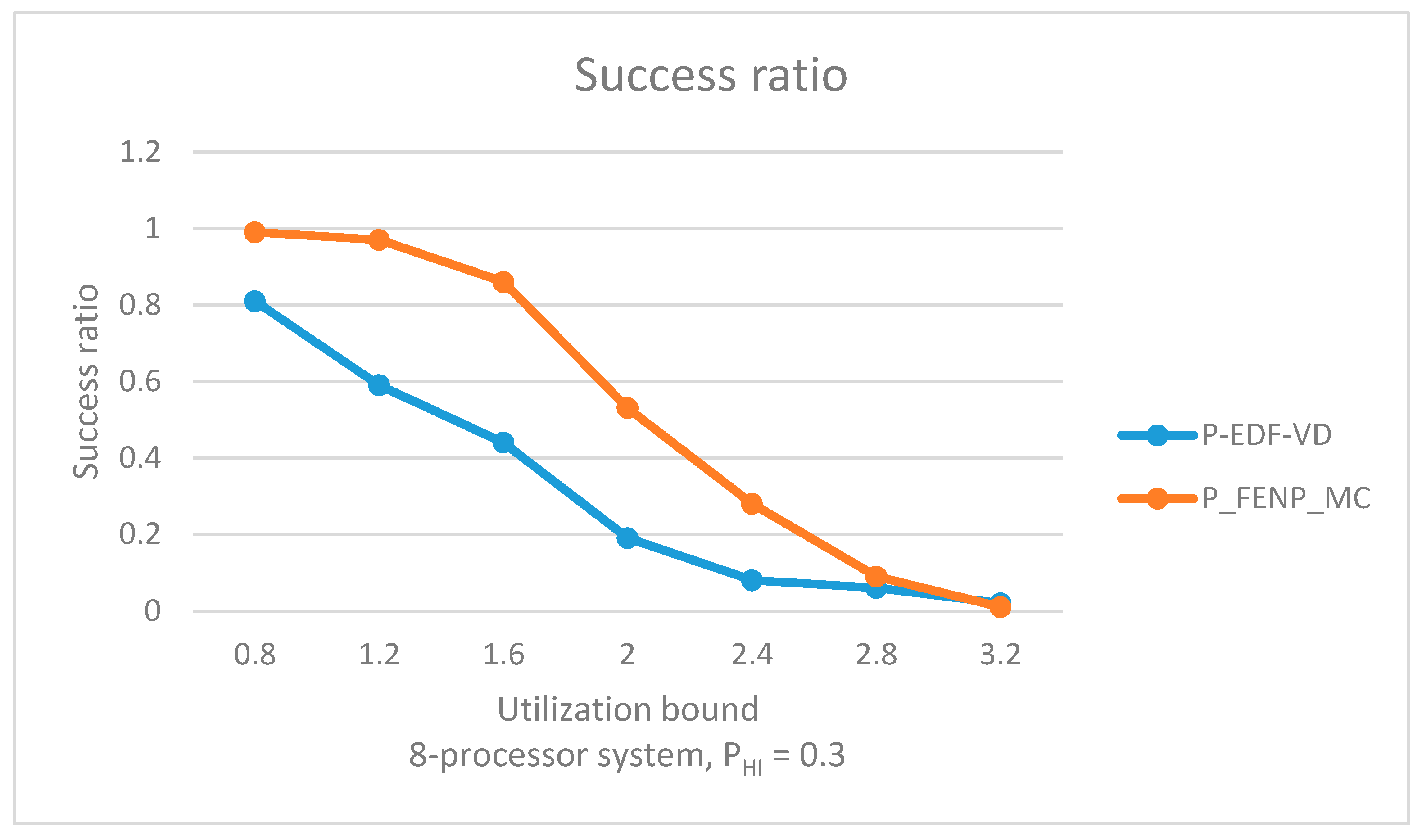
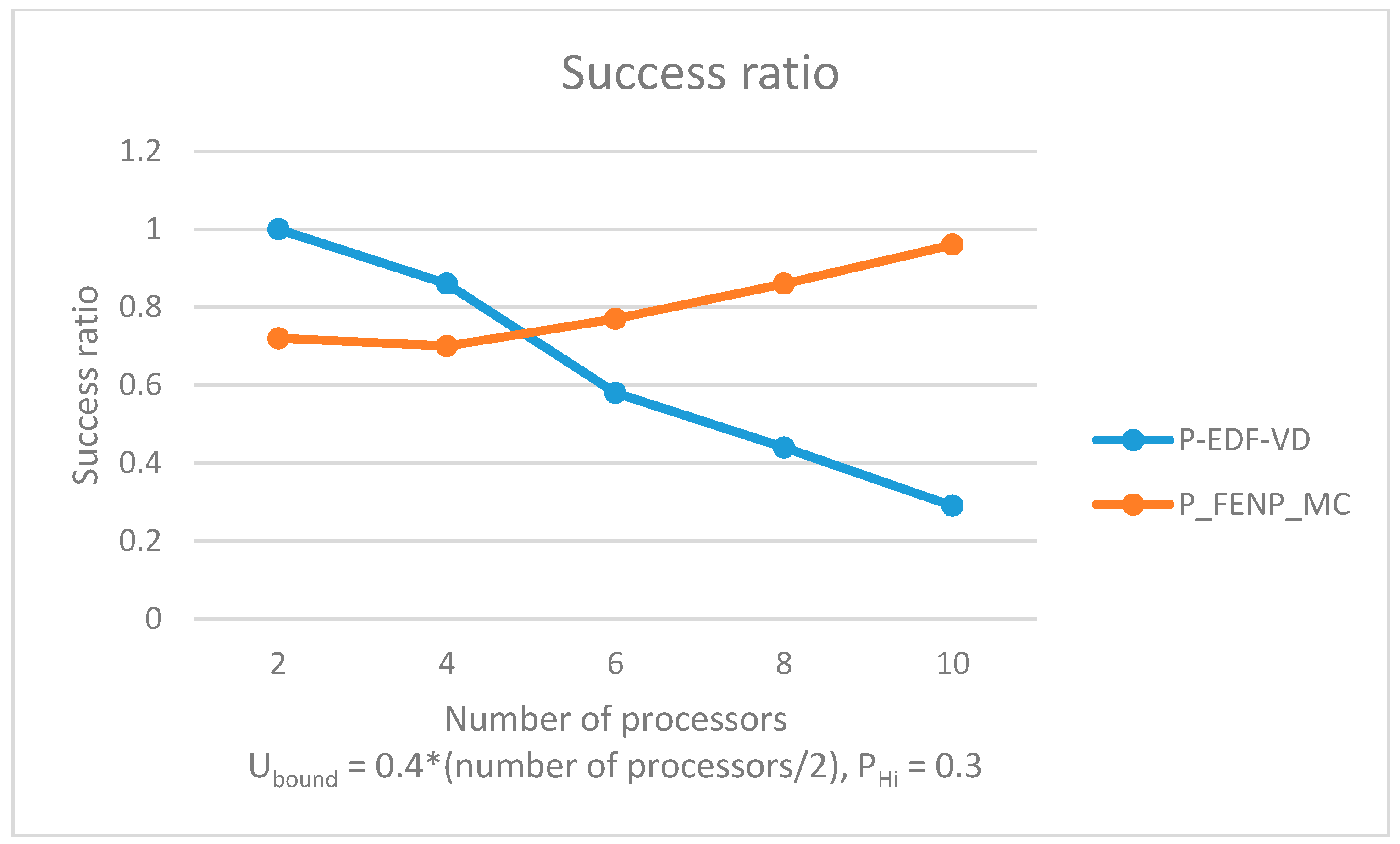
The algorithm performance is analyzed using the success ratio against the utilization of the task sets;
The proposed algorithm performance is compared against a time-triggered and an event-driven scheduling method in a non-preemptive context: Time-Triggered Merge (TT-Merge)/Energy-efficient Time-Triggered Merge (Energy-efficient TT-Merge) [
12] and Earliest Deadline First with Virtual Deadlines (EDF-VD) [
13], a non-preemptive variant.
The rest of this paper is structured as follows: In
Section 2 we briefly present the state of the art regarding scheduling in a mixed criticality time-triggered environment. In
Section 3, we describe our proposed scheduling algorithm for uniprocessor mixed criticality systems, while in
Section 4, we propose an adaptation for homogenous multiprocessor MCSs. In
Section 5, we analyze the performance of the proposed algorithm in terms of success ratio and compare it against a popular one, namely, EDF-VD NP (EDF-VD in its non-preemptive form). We conclude our paper in
Section 6, where we also propose some future research and development directions.
2. Related Work
Since Vestal’s first mixed criticality model formalization [
14], MCSs have attracted particular attention that has materialized in a set of scheduling algorithms that can be classified based on their scheduling points (i.e., the moments in time when scheduling decisions are made) into three categories: event-driven, time-triggered, and hierarchical scheduling approaches.
An extensive survey on scheduling in MCSs [
9] shows that, until recently, the scheduling problem was mainly focused on event-driven scheduling algorithms, despite the fact that there are also important endeavors regarding time-triggered and hybrid approaches. In event-driven schedulers, the scheduling points are defined by task completion and task arrival events. Examples of event-driven schedulers were introduced in [
15,
16,
17,
18,
19]. A popular event-driven scheduling algorithm in MCSs is Earliest Deadline First with Virtual Deadlines (EDF-VD) for two criticality levels (Hi—high criticality and Lo—low criticality) [
13]. The algorithm computes a virtual deadline for every Hi-criticality task if the system is in Lo mode. In Hi mode, Hi-criticality tasks are scheduled according to their real deadlines. This is done in order to balance the schedulability on different criticality levels, which results in better schedulability and run-time performance.
Due to their predictability, time-triggered approaches have become increasingly popular in the last couple of years, but the relevant works are still limited and much more could be expected in the future. Time-triggered schedulers make their scheduling decisions at predetermined points in time. Few papers tackling MC scheduling in time-triggered environments appeared only in the last decade [
6,
10,
12,
20,
21]. In [
20], a heuristic for constructing scheduling tables in a time-triggered environment was presented. The algorithm relies on backtracking to guide the search in a tree-based structure, and it consists of two heuristics: one for constructing the scheduling tables and the other for backtracking. Another method for constructing scheduling tables based on priority ordering is described in [
10]. The technique incorporates “mode-change”, which increases flexibility and system performance. In [
21], a time-triggered scheduling algorithm for both independent and dependent MC jobs on an identical multiprocessor platform is proposed. Two separate scheduling tables are constructed for each processor to schedule dual-criticality tasks. Furthermore, the schedule is global, which means that jobs can be preempted in one processor and resume their execution in another processor. While the algorithms mentioned before are focused on predictability, the main goal of the algorithm proposed in [
6] is to provide a low-jitter periodic schedule for mixed criticality messages in a time-triggered non-preemptive environment. Additionally, the algorithm introduced in [
12] is meant to reduce the energy consumption. However, none of the algorithms mentioned above are focused on guaranteeing jitterless execution in a mixed criticality system, for all the active tasks, regardless of the system criticality mode. This is obviously a requirement for many safety-critical systems and represents the gap we aim to fill in this paper.
Hierarchical approaches combine both scheduling tables and event-driven scheduling methods, but the research on such systems is still in its preliminary stage. A hierarchical algorithm was introduced in [
22] for scheduling MC real-time tasks on multiprocessor platforms. The method provides temporal isolation among tasks of different criticalities while allowing slack to be redistributed across different criticality levels. The same algorithm was implemented and tested on a standard real-time operating system (RTOS) in [
23]. The experimental results showed that RTOS-related overheads are maintained at acceptable levels and the system is robust with respect to breaches of optimistic execution time assumptions.
4. P_FENP_MC
4.1. Theoretical Aspects
For mixed criticality multicore systems, we propose an adaptation of the P_FENP which we call P_FENP_MC. The mapping algorithm is similar to that proposed in [
28].
P_FENP_MC consists of two phases, namely, an offline phase and an online phase. The task partitioning to processors is carried out offline. A feasibility test is then conducted on each processor, followed by creating the table for that processor. Tasks are scheduled according to the dispatch tables in the online phase. The system starts in Lo-criticality mode; therefore, tasks will be scheduled according to the Lo-criticality dispatch table. Once a job executes beyond its Lo-criticality WCET, the system switches to Hi-criticality mode and tasks will be scheduled in compliance with the Hi-criticality dispatch table. For each processor dispatch table, tasks are sorted in nondecreasing order of their start times. Next, the task with the lowest start time is extracted from the dispatch table and its first instance is executed. After job finishes executing, the start time of task is recalculated. is then added to the corresponding dispatch table based on Equation (11), and the task with the lowest start time is again extracted from the sorted list of tasks and executed.
The partitioning algorithm proceeds as follows:
Each processor has a scheduling table associated to it. Tasks from the task set are selected one by one and added in each scheduling table. If the scheduling table was initially not empty, two conditions are verified:
- I.
The current processor utilization, which is the sum of utilizations of all the tasks from the scheduling table associated with the corresponding processor and must not exceed 1 [
29]:
where
.
- II.
The schedulability test performed for the task subset on the processor must be positive.
If the two conditions are met, the task will remain in the scheduling table, the processor utilization is updated, and the next task is removed from the ready queue and tested. If the scheduling table was initially empty, the task is added without verifying the two conditions and the processor utilization is updated.
If one of the two conditions returns FAILURE, the task is removed from the scheduling table and added in the next processor scheduling list, where the same test is performed.
4.2. Execution Examples
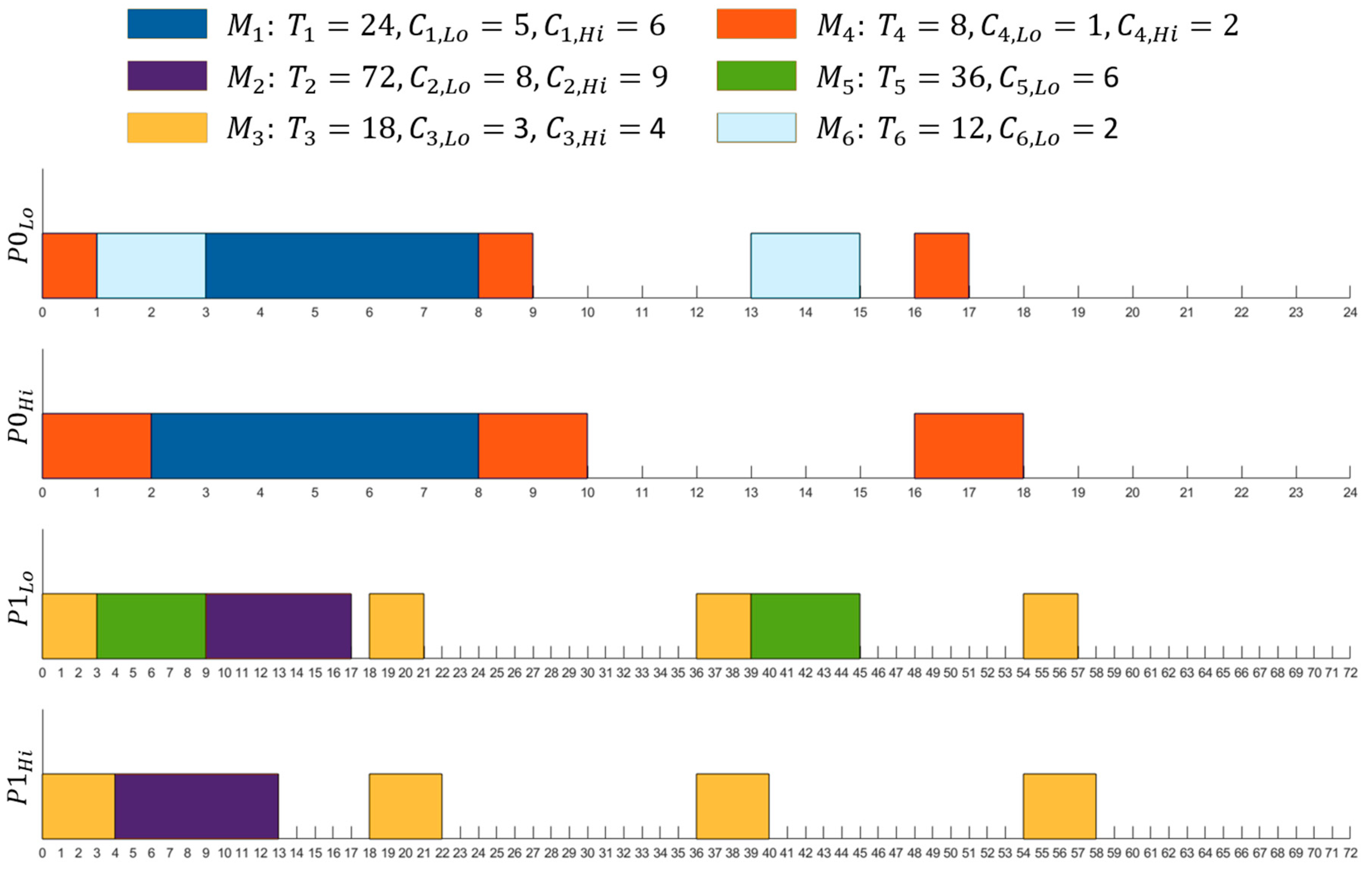
In order to illustrate the task partitioning method described in
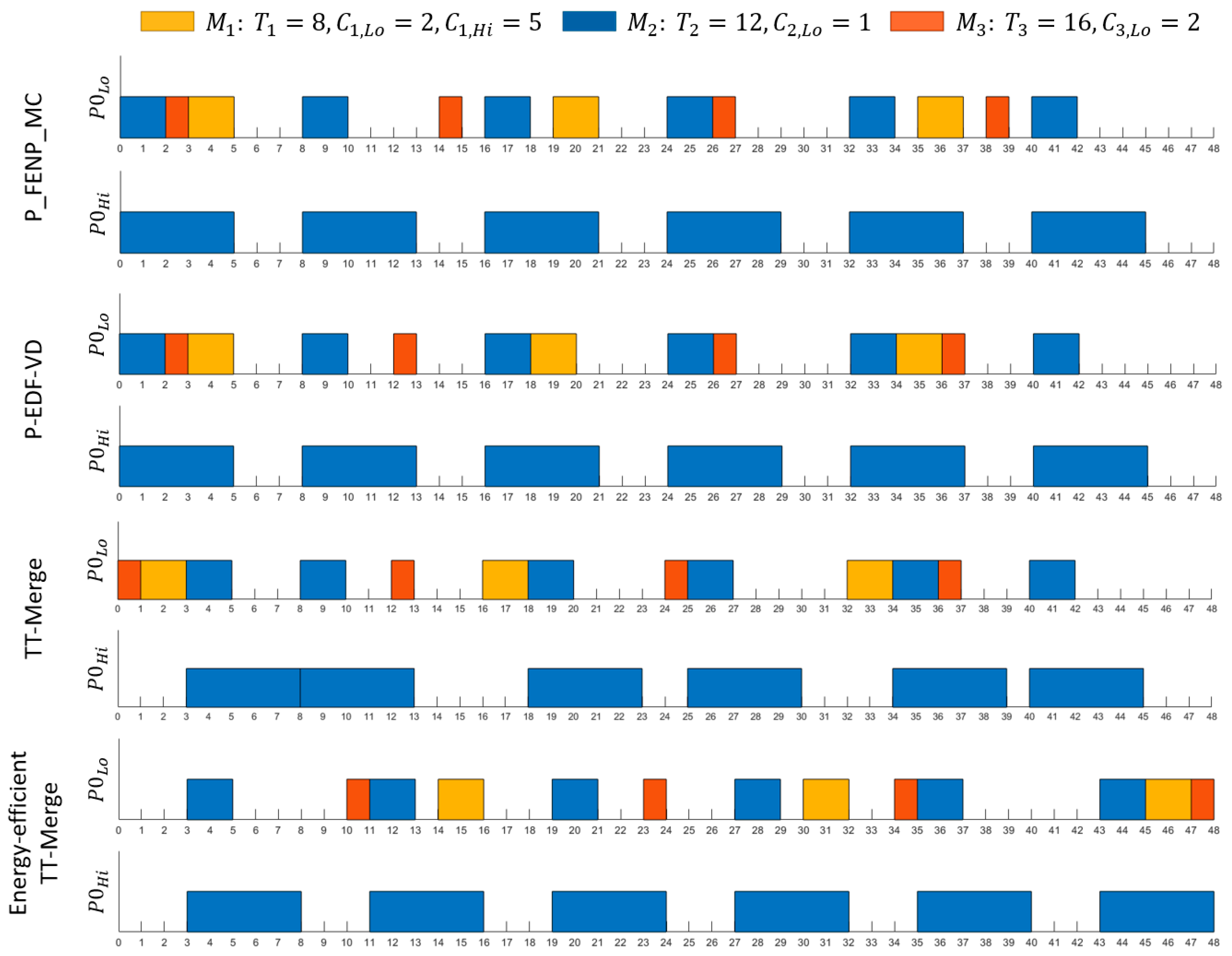
Section 4.1 we provide an example of six mixed criticality tasks scheduled on a dual-criticality system with two processors.
Table 5 contains the timing parameters of the tasks and the processor utilization for each criticality level.
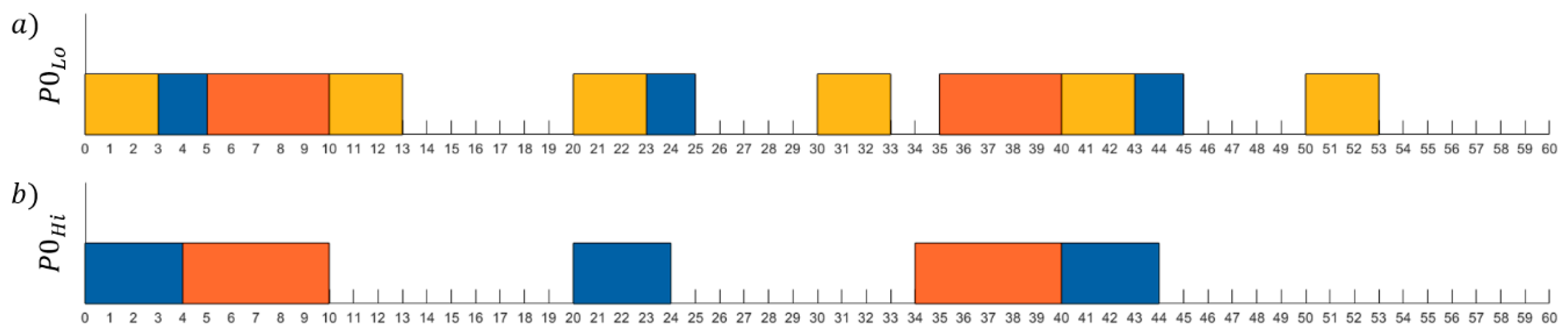
In this case, P_FENP_MC provides the following results: tasks
,
, and
are assigned to the first processor (
) with a Lo-criticality total utilization of 0.5 and a Hi-criticality total utilization of 0.5, while tasks
,
, and
are partitioned to
with a Lo-criticality total utilization of 0.445 and a Hi-criticality total utilization of 0.347. Scheduling for both the Hi- and Lo-criticality modes is illustrated in
Figure 5.
It must be noted that for Condition I and for calculating the total utilization on each processor, we use Hi-criticality total utilization for the Hi-criticality WCET and Lo-criticality total utilization for the Lo-criticality WCET. Therefore, Condition I must be verified for both the Hi-criticality total utilization and the Lo-criticality total utilization. For Condition II, both the Lo-criticality WCET and the Hi-criticality WCET are considered.
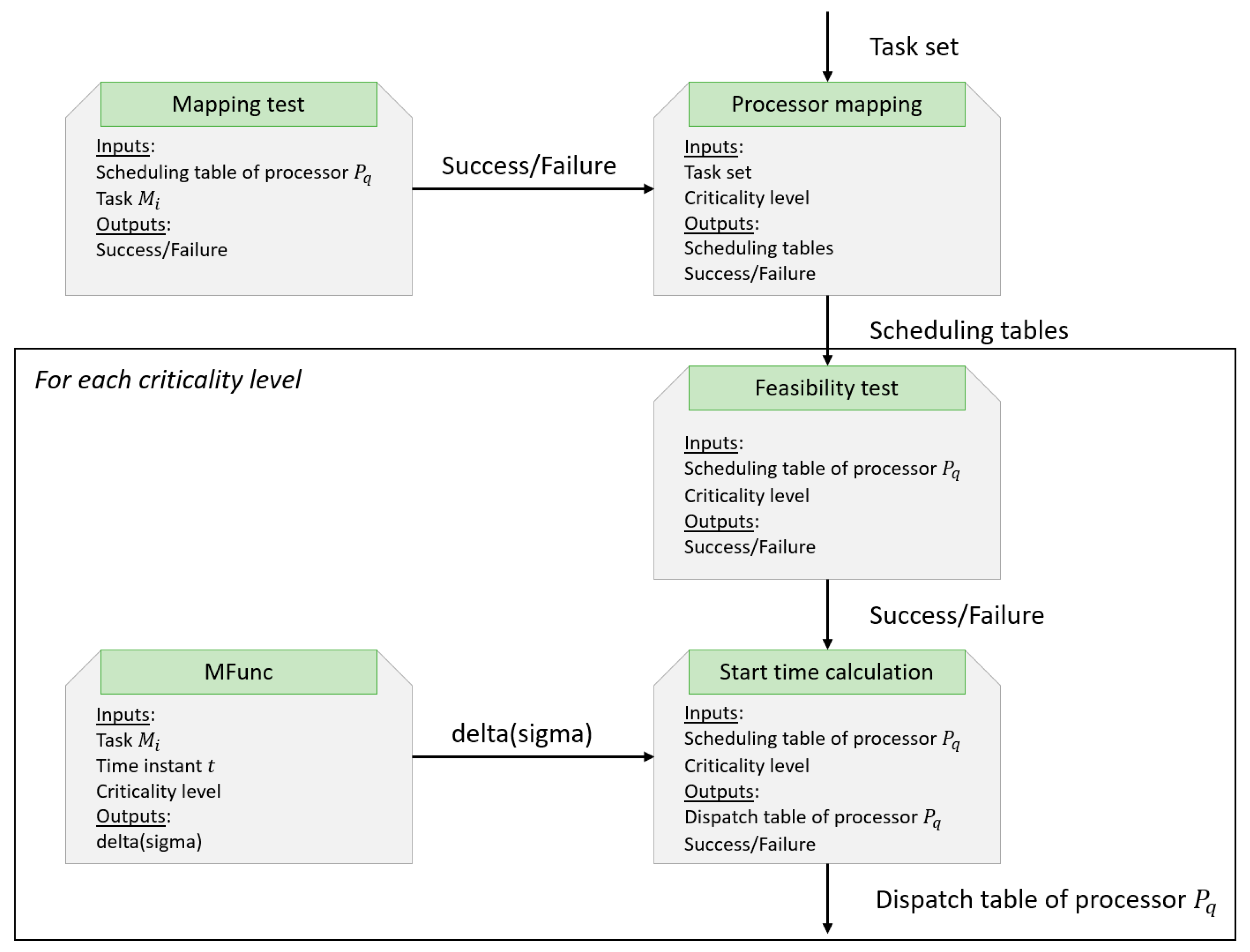
4.3. Implementation Guidelines
Next, the two phases of the algorithm are described using diagrams. In the offline phase, the dispatch tables for each processor are created using the mapping function and the feasibility test. A diagram of the P_FENP_MC offline phase is presented in
Figure 6.
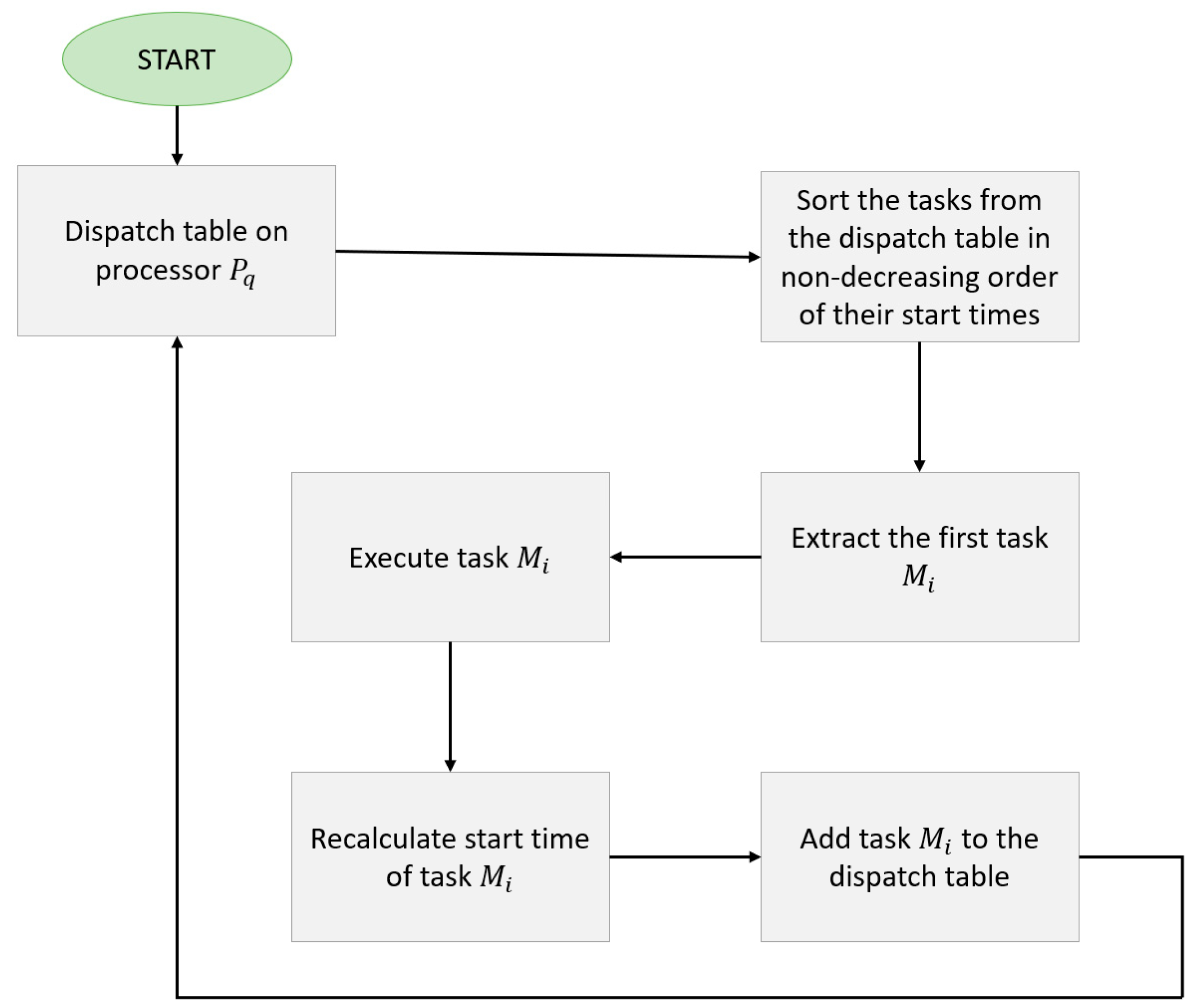
The online phase uses the dispatch tables created in the previous phase and consists of the actual scheduling algorithm. On each processor, its dispatch table is used and updated dynamically. In this table, jobs are sorted in nondecreasing order of their start times and then, one by one, extracted from the set in order to be executed. Once a task instance is executed, the start time of the next instance is calculated using Equation (11) and inserted in the dispatch table so that the table remains sorted by start times.
Figure 7 depicts the online phase of the P_FENP_MC algorithm.
The feasibility test conducted on each processor is shown in Algorithm 4, while Algorithm 5 computes the processor dispatch tables.
| Algorithm 4 Mapping_test |
Input:
Output:
- 55
add to - 56
sort according to in a nondecreasing order - 57
fordo - 58
fordo - 59
- 60
ifthen - 61
remove from - 62
return - 63
end if - 64
ifthen - 65
remove from - 66
return - 67
end if - 68
end for - 69
end for - 70
return
|
| Algorithm 5 P_FENP_MC |
| Input: |
| Output: |
|
|
- 1
- 2
- 3
- 4
fordo - 5
fordo - 6
- 7
if - 8
- 9
else - 10
- 11
end if - 12
ifthen - 13
- 14
- 15
break - 16
ened if - 17
end for - 18
ifthen - 19
ifthen - 20
return - 21
end if - 22
- 23
- 24
- 25
add to - 26
end if - 27
end for - 28
return SUCCESS
|
6. Conclusions and Future Work
As the number and complexity of safety-critical real-time applications increase, special attention needs to be paid to developing suitable and reliable scheduling techniques, especially for safety-critical systems running in time-triggered environments. In this paper we proposed a scheduling method for jitterless execution of hard real-time tasks in mixed criticality systems. Our approach is based on the real-time FENP scheduling algorithm and specifically tailored to MCS requirements. Additionally, feasibility tests were proposed for both uniprocessor and homogenous multiprocessor systems, and the algorithm performance was compared against an event-driven scheduling algorithm in a non-preemptive context, P-EDF-VD.
As future work, we intend to further investigate implementations of this scheduling methodology in RTOSs and to analyze the performance improvements of jitter-sensitive applications scheduled with P_FENP_MC in domains such as system control, robotic systems, and real-time communications.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}