Active Sidewall Panels with Virtual Microphones for Aircraft Interior Noise Reduction


Abstract
:Featured Application
Abstract
1. Introduction
2. Methods
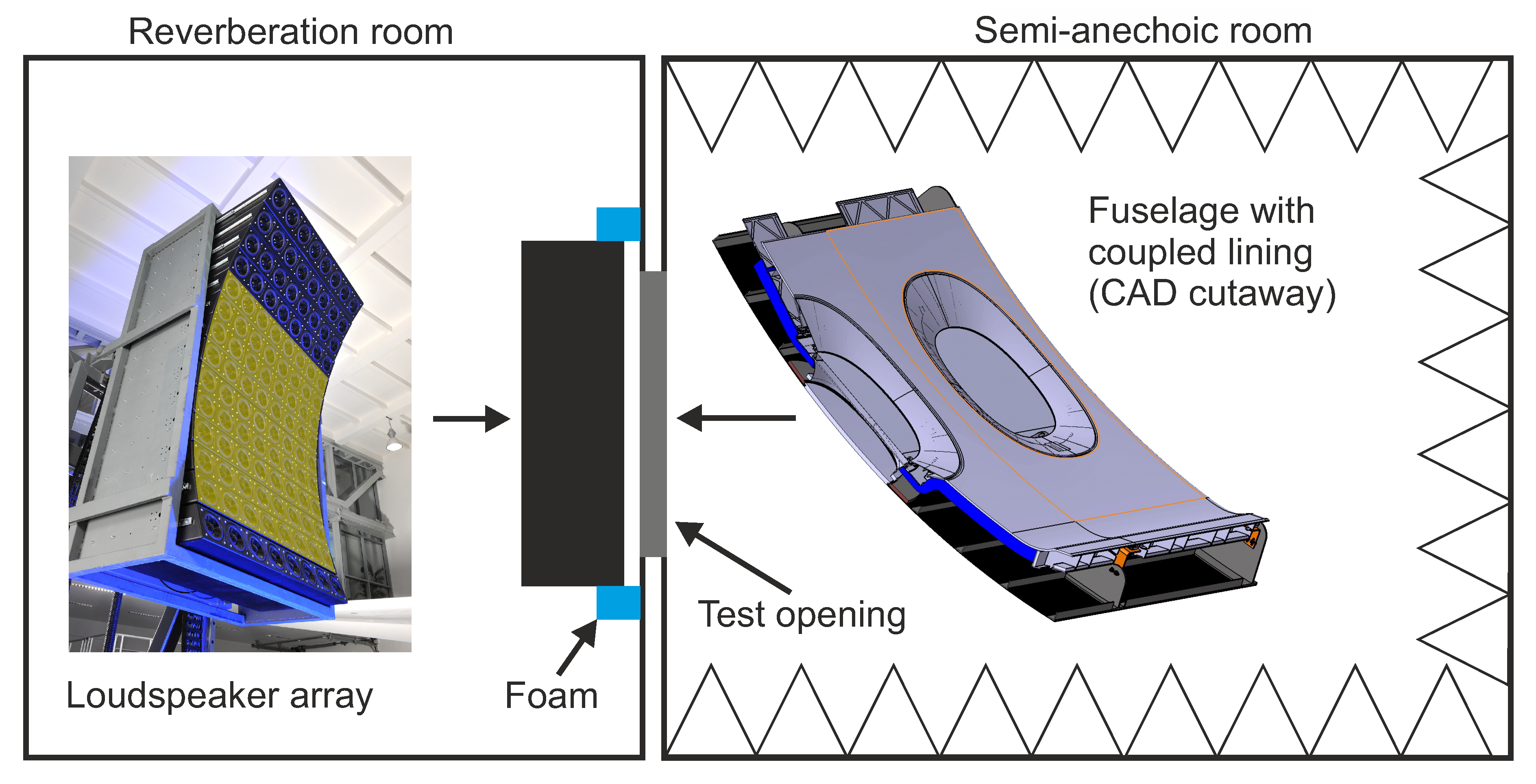
2.1. Experimental Setup
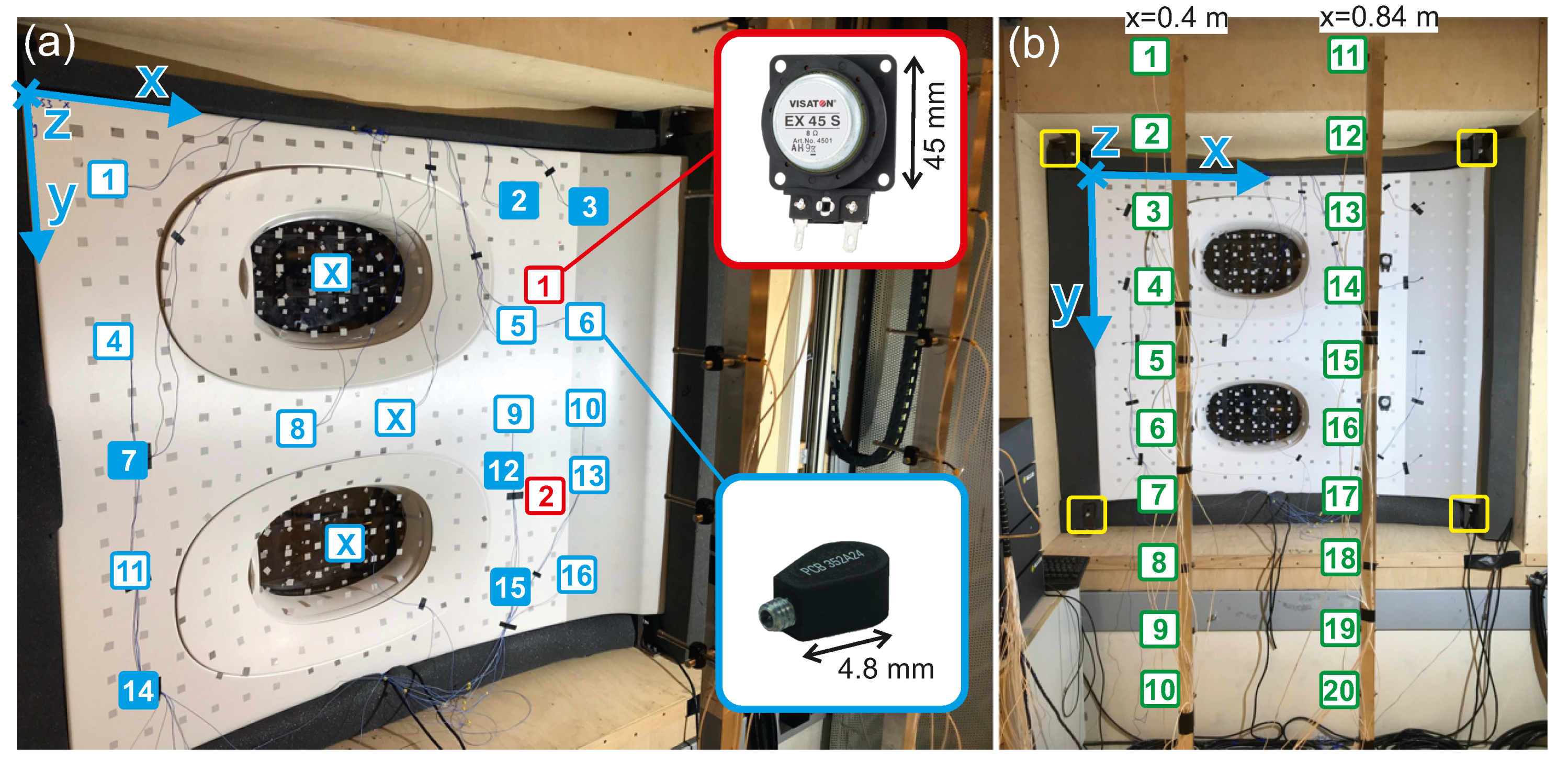
2.2. Sensors and Actuators
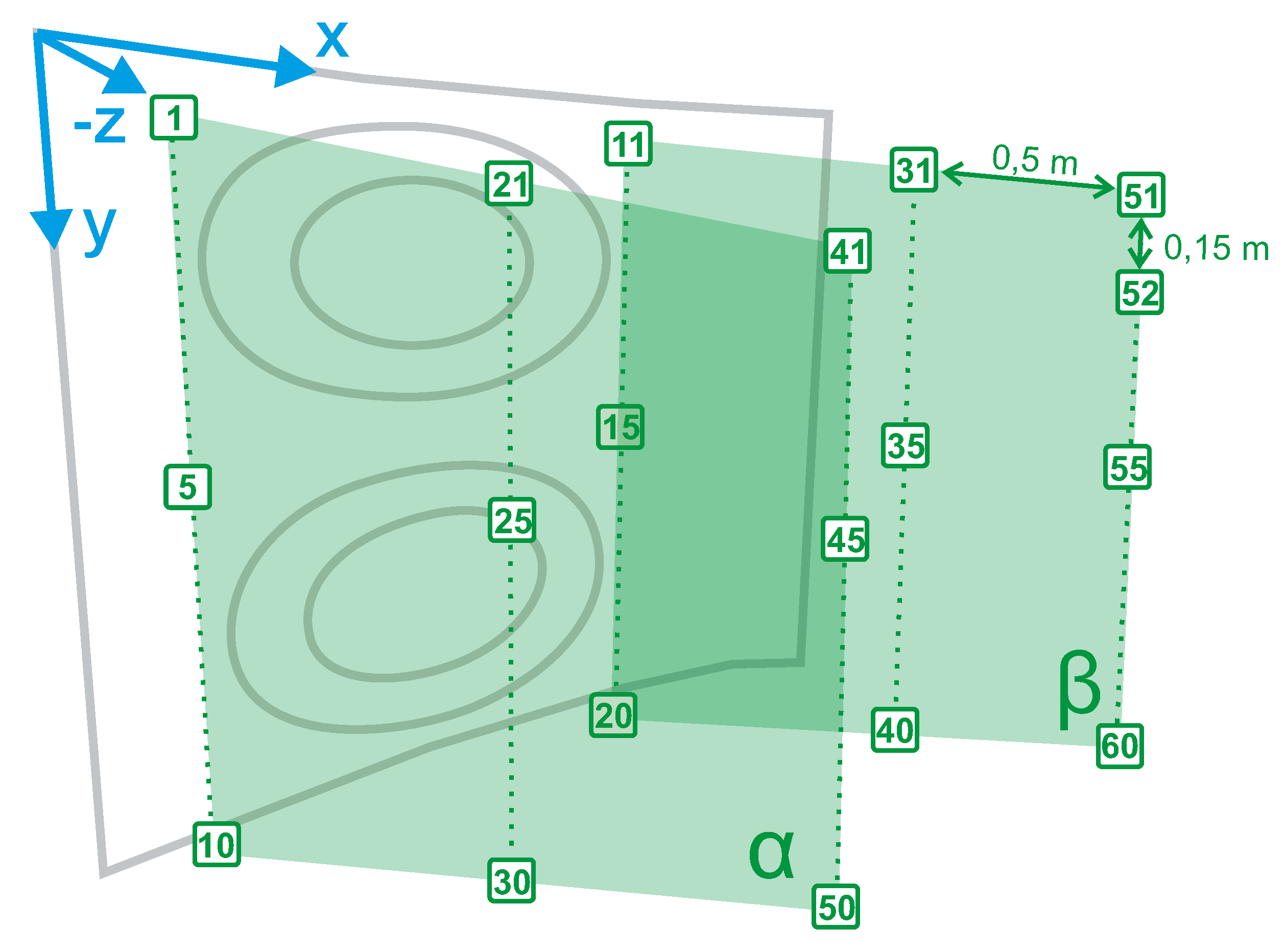
2.3. Simulation
3. Results and Discussion
Funding
Acknowledgments
Conflicts of Interest
References
- Elliott, S.J.; Nelson, P.A.; Stothers, I.M.; Boucher, C.C. In-flight experiments on the active control of propeller-induced cabin noise. J. Sound Vib. 1990, 140, 219–238. [Google Scholar] [CrossRef]
- Fuller, C.R.; Jones, J.D. Experiments on reduction of propeller induced interior noise by active control of cylinder vibration. J. Sound Vib. 1987, 112, 389–395. [Google Scholar] [CrossRef]
- Lyle, K.H.; Silcox, R.J. A Study of Active Trim Panels for Interior Noise Reduction in an Aircraft Fuselage; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1995. [Google Scholar] [CrossRef]
- Tran, B.N.; Mathur, G.P. Aircraft interior noise reduction tests using active trim panels. In Proceedings of the 1996 National Conference on Noise Control Engineering Noise-Con 96, Bellevue, Washington, USA, 29 September–2 October 1996; pp. 395–400. [Google Scholar]
- Misol, M.; Algermissen, S.; Rose, M.; Monner, H.P. Aircraft Lining Panels with Low-Cost Hardware for Active Noise Reduction. In Proceedings of the 2018 Joint Conference ACOUSTICS, Ustka, Poland, 11–14 September 2018. [Google Scholar] [CrossRef] [Green Version]
- Misol, M. Full-scale experiments on the reduction of propeller-induced aircraft interior noise with active trim panels. Appl. Acoust. 2020, 159, 107086. [Google Scholar] [CrossRef]
- Mazur, K.; Pawelczyk, M. Virtual Microphone Control for an Active Noise-Cancelling Casing. Active Noise and Vibration Control. In Solid State Phenomena; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2016; Volume 248, pp. 57–66. [Google Scholar] [CrossRef]
- Haase, T.; Unruh, O. Active Control of Counter-Rotating Open Rotor Interior Noise in a Dornier 728 Experimental Aircraft: Optimised Sensor Placement. Acta Acust. United Acust. 2016, 102, 361–372. [Google Scholar] [CrossRef]
- Roure, A.; Albarrazin, A. The remote microphone technique for active noise control. In Proceedings of the Active 99: The International Symposium on Active Control of Sound and Vibration, Fort Lauderdale, FL, USA, 2–4 December 1999; Douglas, S., Ed.; Volumes 1–2, pp. 1233–1244. [Google Scholar]
- Cheer, J.; Daley, S. Active structural acoustic control using the remote sensor method. J. Physics Conf. Ser. 2016, 744. [Google Scholar] [CrossRef]
- Misol, M. Active sidewall panels with remote microphone technique for aircraft interior noise reduction. In Proceedings of the 26th International Congress on Sound and Vibration, Canadian Acoustical Association, Montréal, QC, Canada, 7–11 July 2019; pp. 1–8. [Google Scholar]
- Algermissen, S.; Meyer, S.; Appel, C.; Monner, H.P. Experimental synthesis of sound pressure fields for active structural acoustic control testing. J. Intell. Mater. Syst. Struct. 2013. [Google Scholar] [CrossRef]
- Klabes, A.; Appel, C.; Herr, M.; Bouhaj, M. Fuselage Excitation During Cruise Flight Conditions: Measurement and Prediction of Pressure Point Spectra. In Proceedings of the AIAA Aviation, 21st AIAA/CEAS Aeroacoustics Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Stürmer, A.; Akkermans, R. Validation of Aerodynamic and Aeroacoustic Simulations of Contra-Rotating Open Rotors at Low-Speed Flight Conditions. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Roozen, N.B.; Leclere, Q.; Rychtáriková, M.; Glorieux, C. A global error estimator for the uncertainty of a multi-channel spectral analysis. Appl. Acoust. 2015, 87, 57–63. [Google Scholar] [CrossRef] [Green Version]
- Stürmer, A. DLR CROR & Propeller Noise Prediction: Numerical Approach Requirements & Limitations. In Proceedings of the 14th CEAS-ASC Workshop, Warsaw, Poland, 7–8 October 2010. [Google Scholar]
- Misol, M.; Algermissen, S. Remote Sensing for a Lining Integrated Active Structural Acoustic Control System. In European Conference on Multifunctional Structures (EMuS); Martinez, X., Schippers, H., Eds.; International Centre for Numerical Methods in Engineering (CIMNE): Barcelona, Spain, 11–12 June 2019; pp. 24–29. [Google Scholar]
- Mazur, K.; Wrona, S.; Pawelczyk, M. Performance evaluation of active noise control for a real device casing. Appl. Sci. 2020, 10, 377. [Google Scholar] [CrossRef] [Green Version]
- Misol, M.; Haase, T.; Algermissen, S.; Papantoni, V.; Monner, H.P. Lärmreduktion in Flugzeugen mit aktiven Linings. In Proceedings of the Smarte Strukturen und Systeme—Tagungsband des 4SMARTS-Symposiums, Braunschweig, Germany, 21–22 June 2017; pp. 329–339. [Google Scholar]
- Johansson, S.; Sjösten, P.; Nordebo, S.; Claesson, I. Comparison of multiple-and single-reference MIMO active noise control approaches using data measured in a Dornier 328 aircraft. Int. J. Acoust. Vib. 2000, 5, 77–88. [Google Scholar]
- Advanced Concepts for Aero-Structures with Integrated Antennas and Sensors (ACASIAS). Available online: http://www.acasias-project.eu/ (accessed on 9 September 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Virtual Microphones | dB/dB(A) | dB/dB(A) |
|---|---|---|---|
| 2 | 24,26 | / | 29/31 |
| 3 | 4,6,24,26,44,46 | 4.8/1.3 | 15/13 |
| 4 | 4,6,14,16,24,26,34,36,44,46,54,56 | 6.7/4.0 | 16/16 |
| 5 | all | 8.0/5.3 | 13/12 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misol, M. Active Sidewall Panels with Virtual Microphones for Aircraft Interior Noise Reduction. Appl. Sci. 2020, 10, 6828. https://doi.org/10.3390/app10196828
Misol M. Active Sidewall Panels with Virtual Microphones for Aircraft Interior Noise Reduction. Applied Sciences. 2020; 10(19):6828. https://doi.org/10.3390/app10196828
Chicago/Turabian StyleMisol, Malte. 2020. "Active Sidewall Panels with Virtual Microphones for Aircraft Interior Noise Reduction" Applied Sciences 10, no. 19: 6828. https://doi.org/10.3390/app10196828
APA StyleMisol, M. (2020). Active Sidewall Panels with Virtual Microphones for Aircraft Interior Noise Reduction. Applied Sciences, 10(19), 6828. https://doi.org/10.3390/app10196828