Variable Curvature Displays: Optical Designs and Applications for VR/AR/MR Headsets


Abstract
:1. Introduction
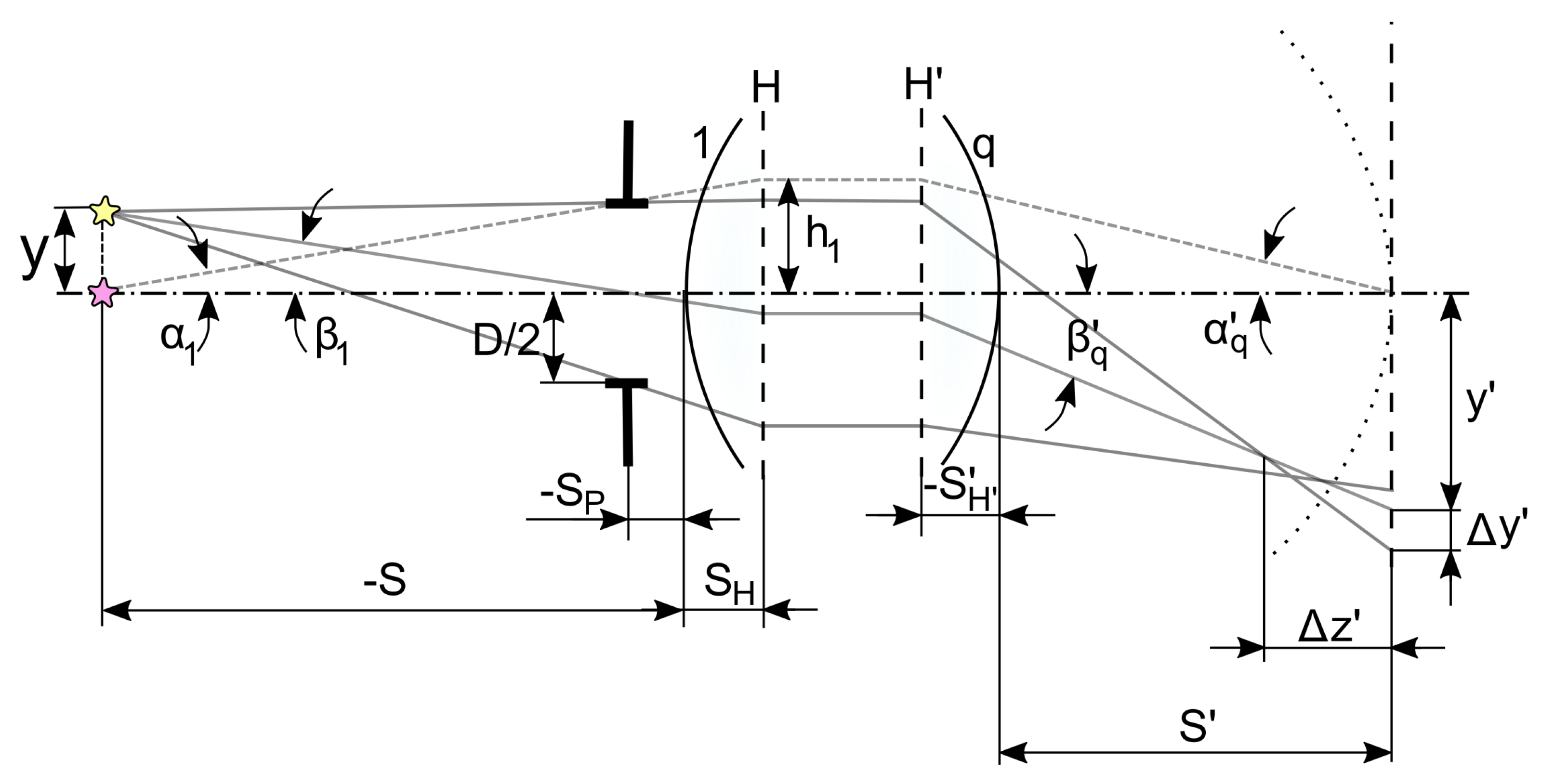
2. Theoretical Background
3. Design Algorithm
4. Optical Design Example
4.1. Design Description
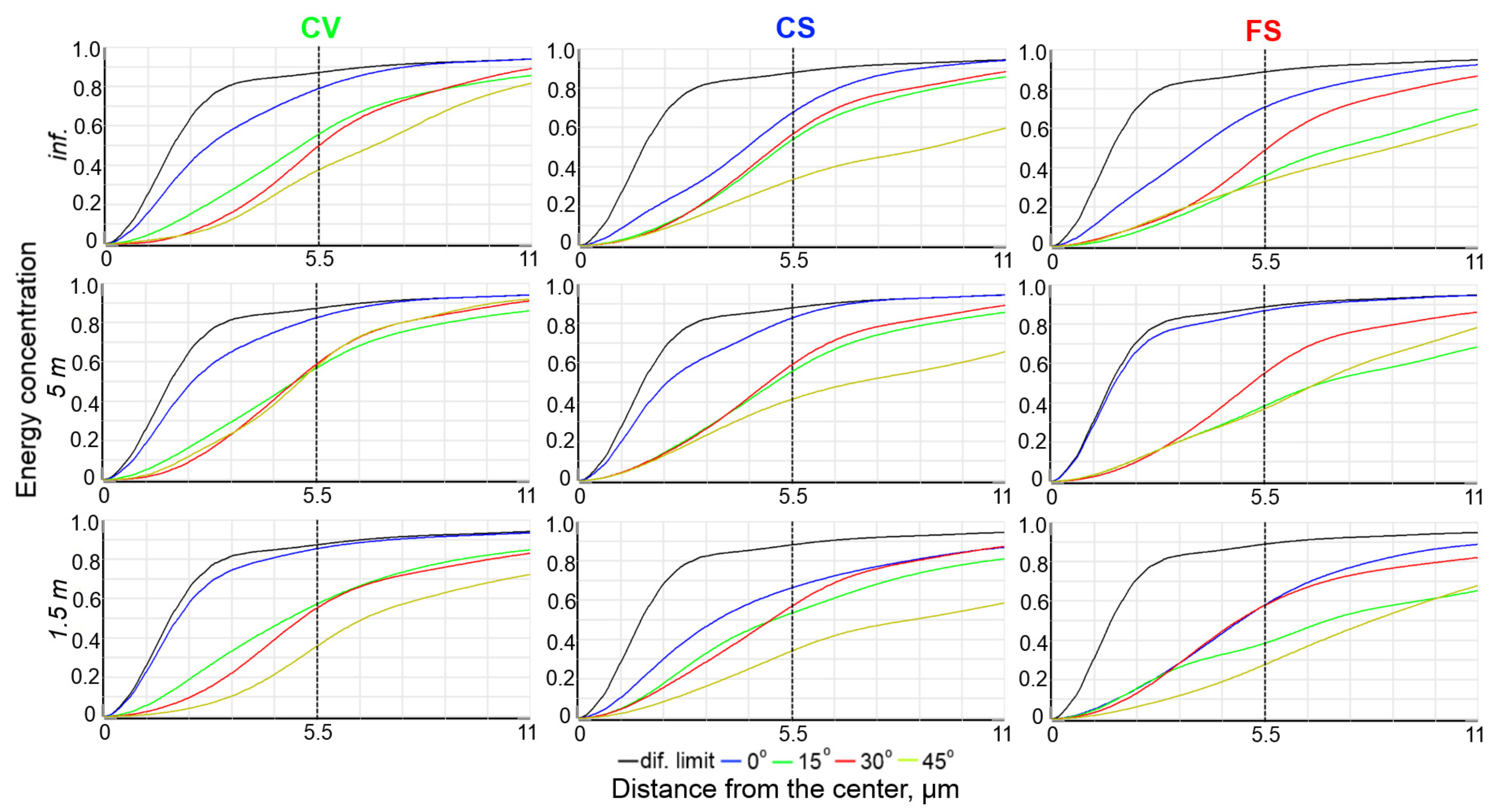
4.2. Performance Analysis
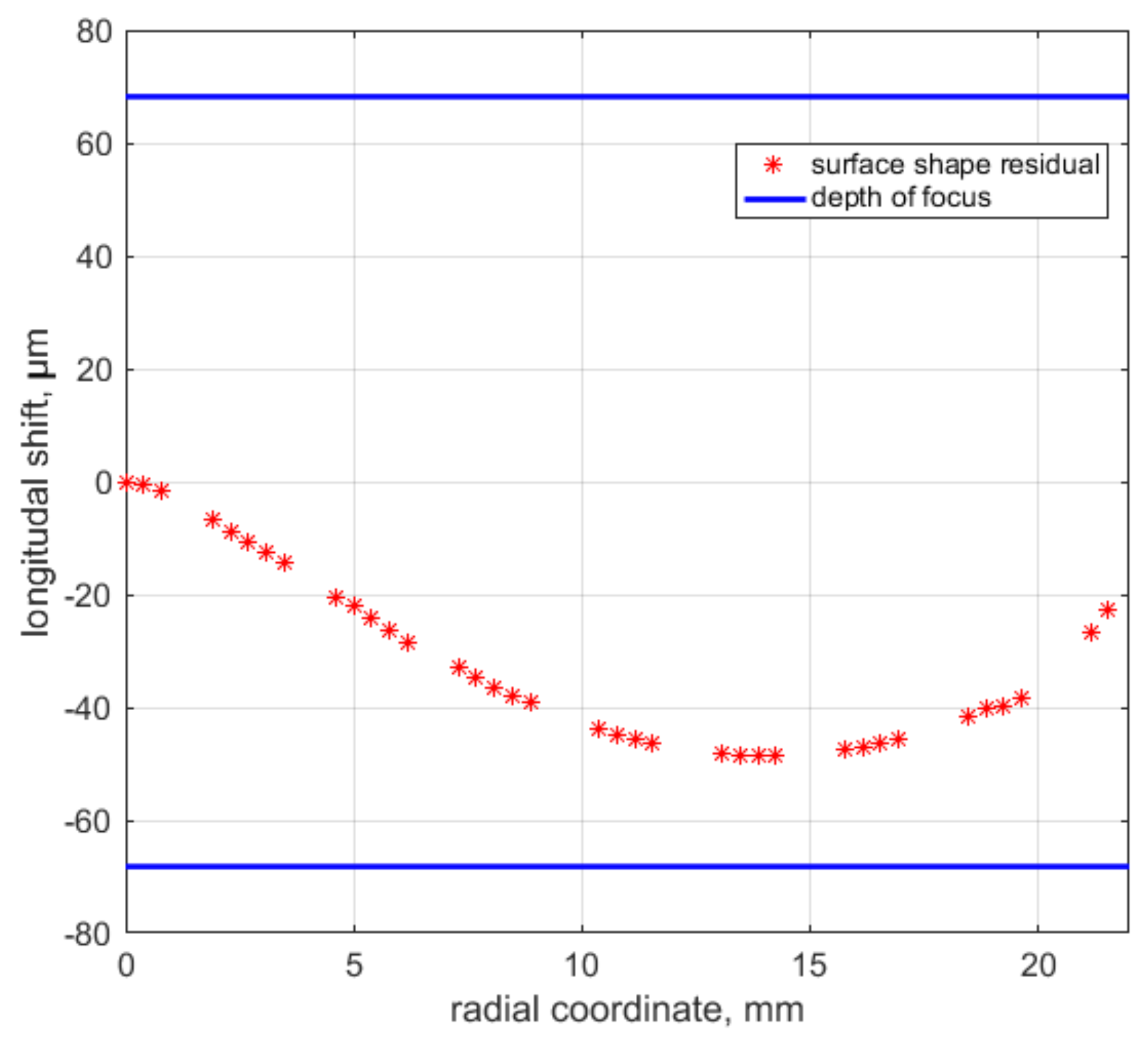
5. Variable Curvature Display Feasibility
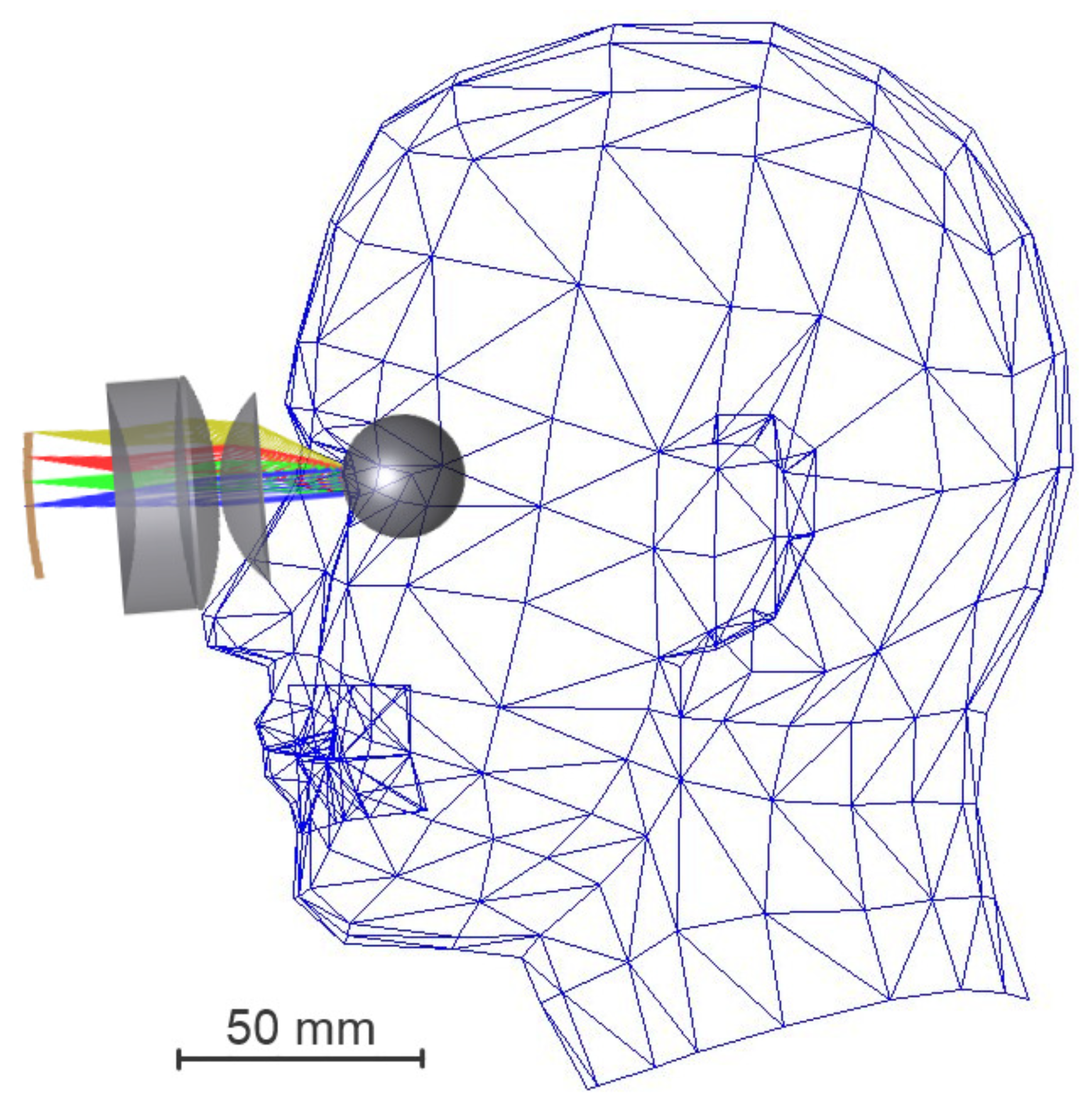
6. Prospective Application
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gaschet, C. A methodology to design optical systems with curved sensors. Appl. Opt. 2018, 58, 973. [Google Scholar] [CrossRef] [PubMed]
- Swain, P.K. Curved ccds and their application with astronomical telescopes and stereo panoramic cameras. Proc. SPIE 2005, 5301, 109–129. [Google Scholar]
- Rim, S.-B. The optical advantages of curved focal plane arrays. Opt. Express 2008, 16, 4965–4971. [Google Scholar] [CrossRef] [PubMed]
- Dinyari, R. Curving monolithic silicon for nonplanar focal plane array applications. Appl. Phys. Lett. 2008, 92, 091114. [Google Scholar] [CrossRef]
- Iwert, O. First results from a novel curving process for large area scientific imagers. Proc. SPIE 2012, 8453, 84531W. [Google Scholar]
- Hugot, E. Flexible focal plane arrays for UVOIR wide field instrumentation. Proc. SPIE 2016, 991, 99151H. [Google Scholar]
- Lombardo, S. Curved detectors for astronomical applications: Characterization results on different samples. Appl. Opt. 2019, 58, 2174–2182. [Google Scholar] [CrossRef] [PubMed]
- Maindron, T. Curved OLED microdisplays. J. Soc. Inf. Display 2019, 27, 1–11. [Google Scholar] [CrossRef]
- Han, S.-S. Head-Mounted Electronic Device. US Patent Appl. 2019/0026871, 24 January 2019. [Google Scholar]
- Narasimhan, B.A. Ultra-Compact pancake optics based on ThinEyes super-resolution technology for virtual reality headsets. Proc. SPIE 2018, 10676, 106761G. [Google Scholar]
- Wartenberg, P. High frame-rate 1″ WUXGA OLED microdisplay and advanced free-form optics for ultra-compact VR headsets. SID Symp. Dig. Techn. Pap. 2018, 49, 514–517. [Google Scholar] [CrossRef]
- Gross, H. Several Aberration Expressions from the Seidel Sums. In Handbook of Optical Systems V.3.; Gross, H., Zugge, H., Peschka, M., Blechinger, F., Eds.; Wiley-VCH: Weinheim, Germany, 2006; pp. 38–41. [Google Scholar]
- Murakami, K. Optical Scanning Device for Scanning Laser Beam Focused on Image-Forming Surface. US Patent 5402258A, 28 March 1993. [Google Scholar]
- Deng, Z. Design and fabrication of concave-convex lens for head mounted virtual reality 3D glasses. Proc. SPIE 2015, 9618, 961814. [Google Scholar]
- Koneva, T.A. Design of the augmented reality system with the smartphone as a source of image. Proc. SPIE 2018, 10690, 106901V. [Google Scholar]
- Zobel, J. Wide-Angle Objective for Endoscopes. US Patent 4858002A, 15 August 1987. [Google Scholar]
- Richter, B. Microdisplays for Smart Eyewear. Optik Photonik 2018, 13, 44–47. [Google Scholar] [CrossRef] [Green Version]
- Jahn, W. Curved sensors for wide field optical systems. In Innovative Focal Plane Design for High Resolution Imaging and Earth Observation: Freeform Optics and Curved Sensors; Aix-Marseille University: Marseille, France, 2017; pp. 109–121. [Google Scholar]
- Lemaitre, G.R. Dioptrics and elasticity—Variable curvature mirrors (VCMs). In Astronomical Optics and Elasticity Theory: Astive Optics Methods; Springer: Berlin, Germany, 2009; pp. 137–168. [Google Scholar]
- Gaschet, C. Curved sensors for compact high-resolution wide field designs. Proc. SPIE 2017, 10376, 1037603. [Google Scholar]
- Muslimov, E. Design of optical systems with toroidal curved detectors. Opt. Lett. 2018, 43, 3092–3095. [Google Scholar] [CrossRef] [PubMed]
- Coletti, G. Mechanical strength of silica on wafers anf its modelling. In Proceedings of the 15th Workshop on Crystalline Silicon Solar Cells & Modules: Materials and Processes, Vail, CO, USA, 7–10 August 2005; pp. 142–149. [Google Scholar]
- Haas, G. Microdisplays for Augmented and Virtual Reality. SID Symp. Dig. Tech. Pap. 2018, 49, 506–509. [Google Scholar] [CrossRef]
- Ghosh, A. Ultra-high-brightness 2K x 2K full-color OLED microdisplay using direct patterning of OLED emitters. SID Symp. Dig. Tech. Pap. 2017, 48, 226–229. [Google Scholar] [CrossRef]
- Buljan, M. Ultra-compact multichannel freeform optics for 4xWUXGA OLED microdisplays. Proc. SPIE 2018, 10676, 1067607. [Google Scholar]
- Tsujimura, T. A 20-inch OLED display driven by super-amorphous-silicon technology. SID Symp. Dig. Tech. Pap. 2003, 34, 6–9. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance, m | Criterion | R, m | Spot X, m | Spot Y, m | Spot RMS, m |
|---|---|---|---|---|---|
| 1.5 | Seidel Sum Tang. | 128.55 | 12.7/46.2 | 12.7/27.9 | 9.0/27.5 |
| Seidel Sum Sag. | 75.12 | 26.6/25.4 | 26.6/43.2 | 15.2/28.7 | |
| Marginal ray | 151.87 | 9.8/50.6 | 9.8/25.1 | 8.8/28.4 | |
| RMS | 117.44 | 14.6/43.4 | 14.6/29.9 | 9.4/27.2 | |
| None | inf. | 21.1/74.6 | 21.1/23.0 | 15.9/38.0 | |
| 5 | Seidel Sum Tang. | 129.50 | 12.1/46.4 | 12.1/ 26.6 | 9.0/27.2 |
| Seidel Sum Sag. | 74.23 | 26.3/25.1 | 26.3/41.9 | 15.1/27.9 | |
| Marginal ray | 140.67 | 10.6/48.7 | 10.6/25. | 8.9/27.7 | |
| RMS | 113.59 | 14.8/42.5 | 14.8/29.2 | 9.5/26.7 | |
| None | inf. | 21.5/74.3 | 21.5/24.1 | 16.0/38.0 | |
| inf. | Seidel Sum Tang. | 129.89 | 11.9/46.5 | 11.9/26.1 | 9.0/27.2 |
| Seidel Sum Sag. | 73.87 | 26.2/25.0 | 26.2/41.4 | 15.0/28.0 | |
| Marginal ray | 136.53 | 10.9/47.8 | 10.9/25.1 | 9.0/27.4 | |
| RMS | 112.08 | 14.9/42.1 | 14.9/29.0 | 9.6/26.5 | |
| None | inf. | 21.6/74.1 | 21.6/24.4 | 16.2/38.0 |
| Distance, m | Distortion, % | Min. rel.illum. |
|---|---|---|
| CV | ||
| 1.5 | 13.2 | 62.0 |
| 5 | 13.7 | 60.6 |
| inf. | 13.9 | 63.6 |
| CS | ||
| 1.5 | 12.1 | 79.0 |
| 5 | 12.1 | 78.3 |
| inf. | 12.1 | 83.4 |
| FS | ||
| 1.5 | 9.2 | 57.8 |
| 5 | 9.3 | 59.0 |
| inf. | 9.3 | 69.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muslimov, E.; Behaghel, T.; Hugot, E.; Joaquina, K.; Guskov, I. Variable Curvature Displays: Optical Designs and Applications for VR/AR/MR Headsets. Appl. Sci. 2020, 10, 712. https://doi.org/10.3390/app10020712
Muslimov E, Behaghel T, Hugot E, Joaquina K, Guskov I. Variable Curvature Displays: Optical Designs and Applications for VR/AR/MR Headsets. Applied Sciences. 2020; 10(2):712. https://doi.org/10.3390/app10020712
Chicago/Turabian StyleMuslimov, Eduard, Thibault Behaghel, Emmanuel Hugot, Kelly Joaquina, and Ilya Guskov. 2020. "Variable Curvature Displays: Optical Designs and Applications for VR/AR/MR Headsets" Applied Sciences 10, no. 2: 712. https://doi.org/10.3390/app10020712
APA StyleMuslimov, E., Behaghel, T., Hugot, E., Joaquina, K., & Guskov, I. (2020). Variable Curvature Displays: Optical Designs and Applications for VR/AR/MR Headsets. Applied Sciences, 10(2), 712. https://doi.org/10.3390/app10020712