1. Introduction
Visual object tracking is one of the most active research topics in the computer vision field because of its wide application areas including: human–computer interaction, autonomous vehicle vision, visual surveillance, and robot vision, etc. In recent years, researchers have paid significant attention to correlation filter (CF)-based tracking algorithms [
1,
2,
3]. The major advantage of the CF-based tracker is twofold: (i) computational efficiency by replacing the spatial correlation estimation process with element-by-element multiplication in the Fourier transform domain and (ii) being an online learning process that updates the position of the target object every frame.
Despite a lot of studies in the visual tracking community, there are still several challenges such as appearance distortion, light change, rapid motion, motion blur, background clutters, deformation, occlusion, and rotation. Since the trackers trace the target based on the appearance and position of the target in the previous frames, tolerance against appearance and position of the target is a major factor which determines the accuracy of a tracker. Such challenging scenes result in significant mismatch between appearance of the real target and input object, which consequently yields the tracking failure. In this context, deep feature-based trackers have recently attracted increasing attention. Many convolutional neural network (CNN)-based trackers have been proposed to achieve higher accuracy than traditional CF-based trackers [
4,
5]. The CNN-based trackers outperform CF-based trackers because deep features provide higher tolerance against challenging scenes.
In spite of many advantages from the deep features, CNN-based trackers need to be trained using a very large dataset. Moreover, an excessive computational load is another disadvantage of the CNN-based trackers, which can process less than five frames per second using a personal computer with a single GPU. When real-time tracking is required, computational efficiency becomes the most important issue. Recently, a high performance camera with a frame rate up to 100 FPS or higher has been used for various applications, such as smart phones, action cams, and drones. In a video captured by such high-FPS cameras, appearance variation over frames are reduced whereas the high processing speed becomes more important. Hamed Kiani Galoogahi et al. presented that CF based trackers outperform deep feature based trackers not only in speed but also in accuracy under high FPS circumstances [
6]. Furthermore, the use of one or more GPUs for a CNN-based tracker is another burden of a real-time, economic realization of practical video object tracking.
In this paper, we propose a novel kernelized correlation filter (KCF)-based tracking method that improves tracking accuracy under challenging circumstances for high frame rates and real-time tracking. The proposed tracking algorithm processes each frame using three steps: (i) detection of tracking failure by analyzing the peak and average of neighboring correlation values, (ii) re-tracking the target using a tracking failure handing algorithm when the tracking failure is detected, and (iii) calculating a motion vector of the target for selecting preferred search window when tracking failure is detected.
2. Related Work
Various tracking approaches have been proposed to solve challenging problems, such as background clutters, partial occlusion, shape deformation, temporary disappearance, illumination changes, etc. [
7,
8,
9]. Those trackers can be categorized based on several criteria such as on- or off-line training, handcrafted feature- or deep feature-based, and generative or discriminative model-based, etc. In online training, trackers are being trained with data acquired in the tracking process, while off-line trackers need a dataset for a priori training. To represent a target object, handcrafted feature-based trackers utilize features that are manually defined by researchers, whereas deep feature-based trackers utilize features extracted from a deep neural networks (DNNs). Discriminative model-based trackers distinguish target objects from background in an appropriate way, whereas generative model-based trackers search the best-matching window to trace the target. In this section, we summarize state-of-the-art tracking methods by classifying them into two categories: (i) correlation filter-based and (ii) deep learning-based methods.
Correlation filter (CF) is one of the most popular approaches to visual tracking because of its robustness and computational efficiency. Basic mechanism of CF is to generate a response map which has large values in the region-of-interest (ROI), but small values in other regions. In this context, tracking is carried out by estimating position with the highest response value as the target location. To the best of the authors’ knowledge, average synthetic exact filter (ASEF) proposed by Bolme et al. [
10] and unconstrained minimum average correlation energy (UMACE) proposed by Mahalanobis et al. [
11] were the first correlation filter-based approaches to visual tracking. However, their training requirements are not suitable for online tracking.
Bolme et al. [
12] proposed an improved version of ASEF, called minimum output sum of square error (MOSSE)-based tracker. The major contribution of the MOSSE-based tracker is the on-line, adaptive training for appearance changes of the target object. After introduction of the MOSSE filter, CF-based tracking methods drew great attention in the visual tracking community and many modified versions of the CF-based tracker have been proposed in the literature. Henriques et al. proposed circulant structured with kernels (CSK) [
1] method that exploits the correlation filter in kernel space, and kernelized correlation filter (KCF) [
2] extends the kernel trick. In the KCF mechanism, the tracker generates a response map by multiplying the filter kernel and cropped search window at every frame in the Fourier domain, and then estimates the target position by searching the highet value in the inverse Fourier transformed response map. As the KCF achieved outstanding performance, researchers tried to improve KCF based tracking method, resulting in many derivational methods. Danelljan et al. [
13] tried to handle scale variation by training an adaptive multi-scale correlation filter using HOG feature, and Liu et al. [
14] tried to solve the partial occlusion problem using multiple correlation filters. Qi et al. [
5] proposed hedged deep tracker (HDT), in which several weak trackers are combined to realize a strong tracker. In other words, target positions are estimated from weak trackers, and a final decision is made by the hedge algorithm that combines weak trackers. Ma et al. [
15] proposed long-term correlation tracker (LCT), which is robust against target translation and can perform re-detection if tracking failure occurs. Bertinetto et al. [
16] presented sum of template and pixel-wise learners (STAPLE) method using HOG and color histograms for target representation. More recently, Yijin et al. [
17] proposed Parallel Correlation Filters, Zhaohui et al. [
18] presented a tracker using correlation filter fused with color histogram and Hao et al. [
19] proposed a correlation filter-based tracker using enhanced features and adaptive Kalman filter.
Meanwhile, deep learning-based tracking methods are actively proposed in the literature. Nam et al. [
20] presented multi-domain network (MDNet) that consists of shared layers and a domain-specific fully connected layer. Target representation is carried out in shared layers, while binary classification is performed in the domain-specific fully connected layer. MDNet has shown outstanding performance in accuracy in a benchmark performed by Galoogahi et al. [
6]. Fan et al. [
21] proposed structure aware network (SANet) as an extended version of MDNet. SANet utilizes deep features from CNN and RNN based on the particle filter. Recently, Siamese network-based trackers have been proposed. In the Siamese network, similarity is calculated by matching the target template and candidate samples. Held et al. [
22] proposed generic object tracking using regression network (GOTURN) based on the Siamese network. More recently, Shuo et al. [
23] proposed lightweight Siamese network based tracker which can perform which can be updated during tracking process, and Lijun et al. [
24] presented a tracking method based on multi-feature fusion Siamese network with Kalman filter.
In addition, a number of different approaches to visual tracking have been proposed, and those can be evaluated by different standards. Generally, the major advantage of CF-based tracking methods is the high processing speed even without using GPU, whereas deep learning-based trackers achieved higher accuracy at the cost of expensive hardware and high computational load. Therefore, it is still worth improving the CF-based tracking methods since low-cost, real-time application is still ubiquitous in visual surveillance applications and numbers of image processing solutions [
25,
26,
27,
28]. In the following section, we discuss improvement of KCF-based tracking method by integrating techniques which can handle tracking challenges.
3. The Proposed Method
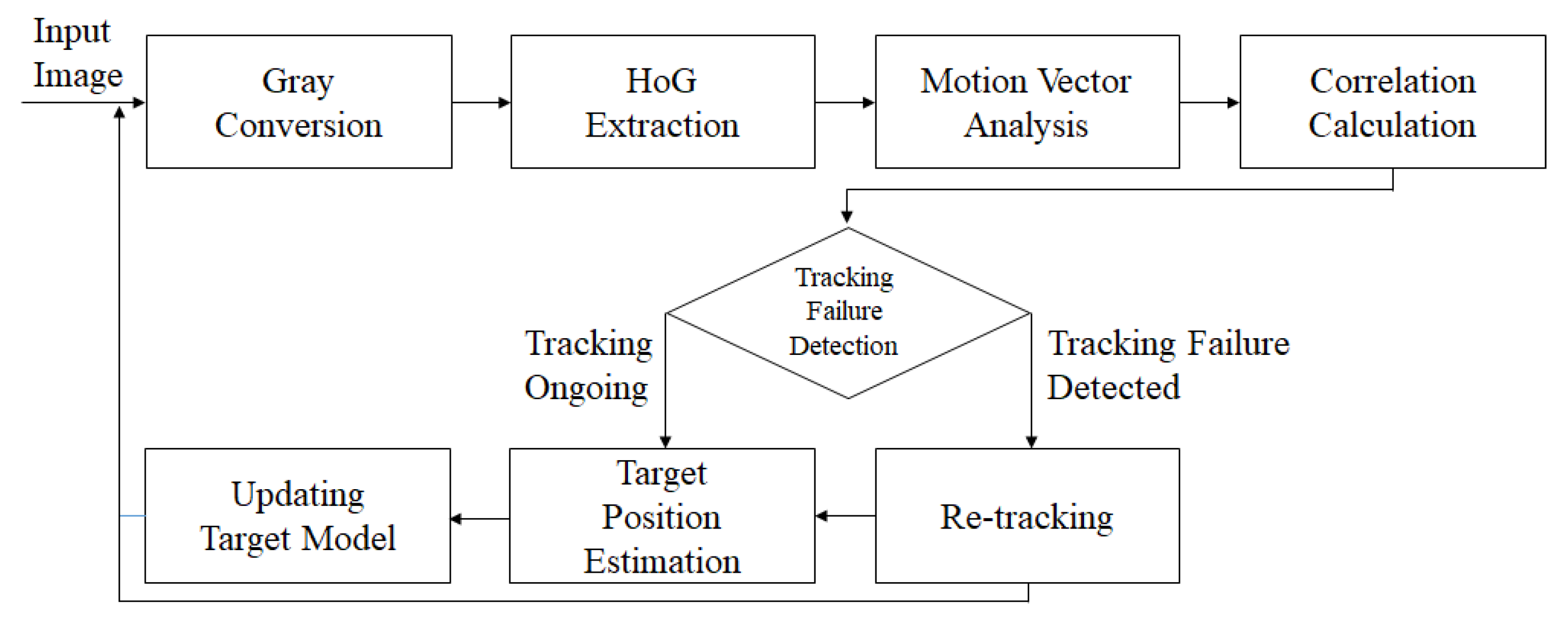
The proposed method consists of three parts; (i) tracking failure detection algorithm, (ii) re-tracking algorithm, and (iii) motion vector analysis algorithm, based on KCF method as shown in
Figure 1. Tracking failure detection and motion vector analysis algorithms are performed in every frame, and re-tracking algorithm is performed only when the tracking failure is detected. In this section, we discuss about proposed method in detail.
3.1. Tracking Failure Prediction by Analyzing Correlation Values
KCF-based trackers calculate correlation values between target and reference using cyclic shift within the pre-specified search window. A correlation value from each cyclic shift corresponds to a cell in the response map. Position of each cell in the response map means the vertical and horizontal shifts. Trackers estimate position of the target by finding the position of a cell with the highest correlation value in the response map and determining the corresponding coordinate in the search window.
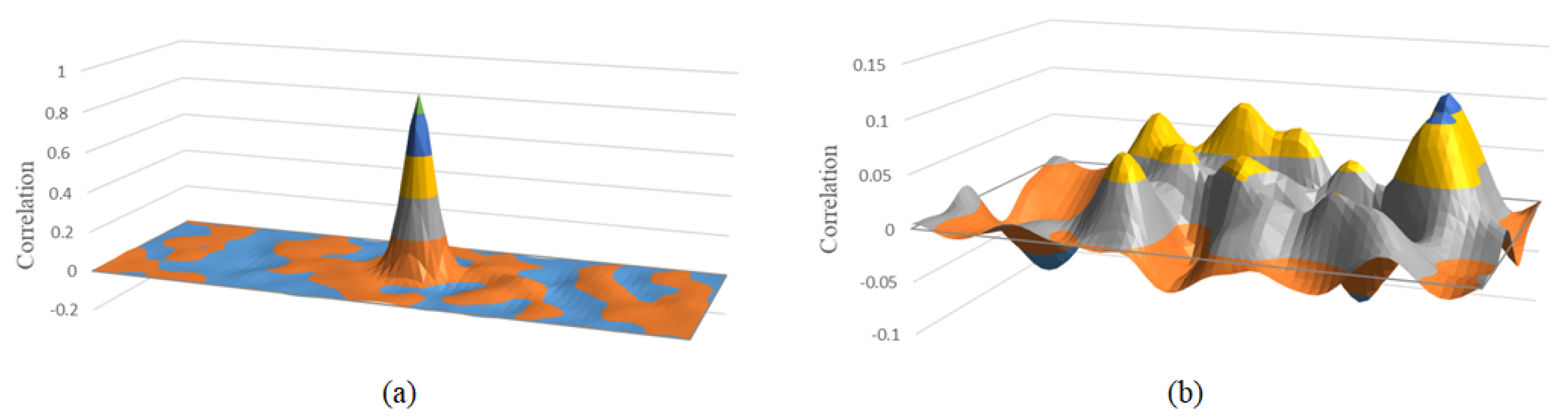
Most trackers can successfully track an object if sequences does not include challenging scenes, where there exists a single peak value. As shown in
Figure 2a, trackers trace the coordinates of the peak every frame under an ideal tracking condition.
On the other hand, under a challenging circumstance, the peak value relatively decreases and its neighboring values increase as shown in
Figure 2b. If a scene contains, for example, a severely blurred target, there is not a single distinct peak correlation value. Since a peak value does not occur at the position of real target in challenging sequences, tracking failure can be predicted by analyzing peak value and neighbor values of the peak.
Let
, for
, be the correlation value of the response map of size
in
tth frame. Then, average correlation value of
neighboring region around
is expressed as
Since the peak coordinate is in the response map, the peak and average correlation values can be expressed as and , respectively.
In Equation (1), average value of
and
over recent
frames can be derived as Equations (2) and (3).
Tracking failure can be predicted by analyzing
and
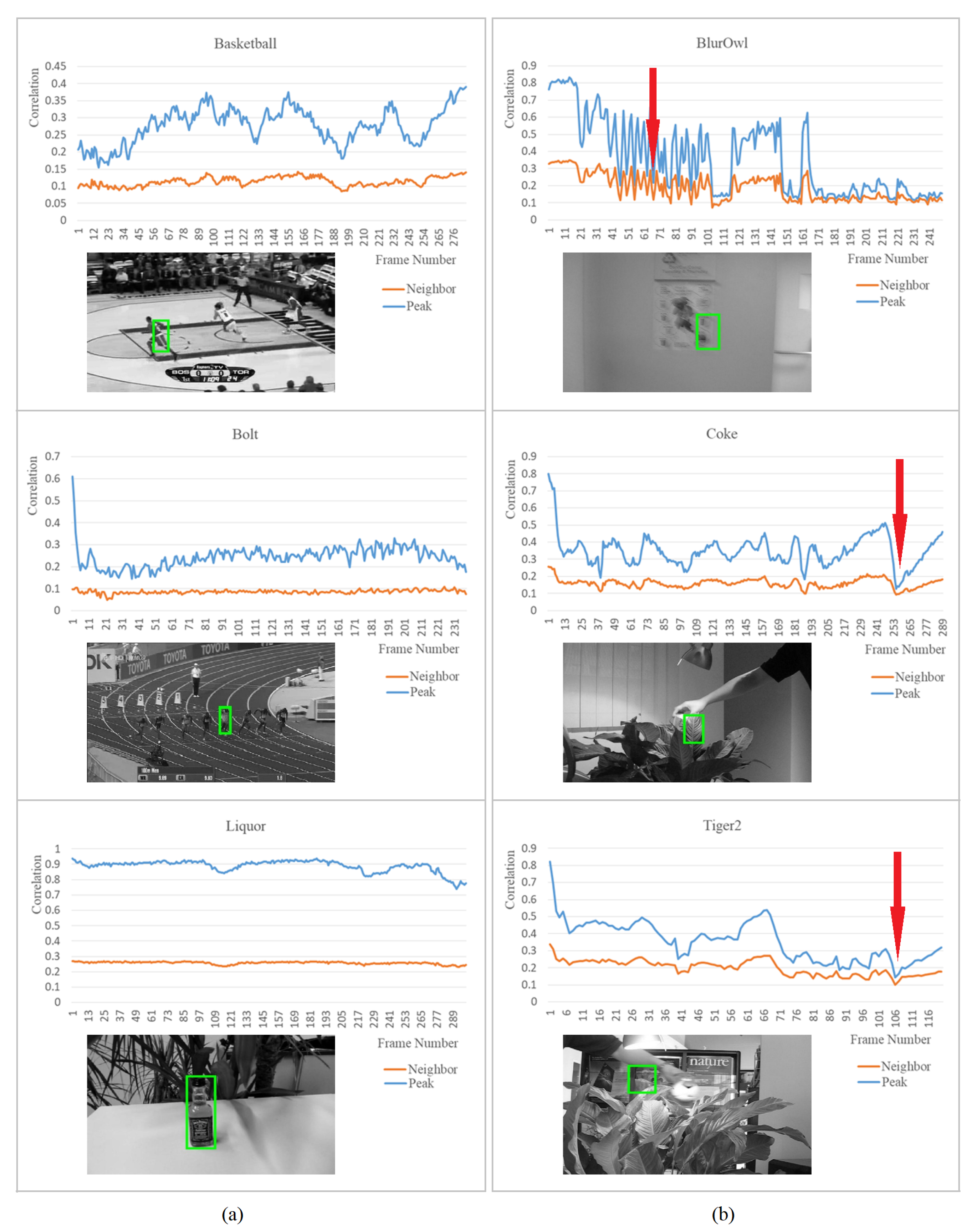
over frames. In
Figure 3, Peak and Neighbor respectively denote
and
.
Figure 3a shows
and
over frames for successful tracking cases, where
is relatively high and sufficiently distinct from
. On the other hand,
Figure 3b shows the failure cases, where the
significantly dropped, and the difference from
becomes indistinct with some oscillations because of the severe blur. Furthermore, if the peak occurs at a wrong position, the tracking process totally fails.
To determine when tracking failure occurs, we use a conditional expression such as
and
, then a conditional expression to decide tracking failure can be defined as
where
and
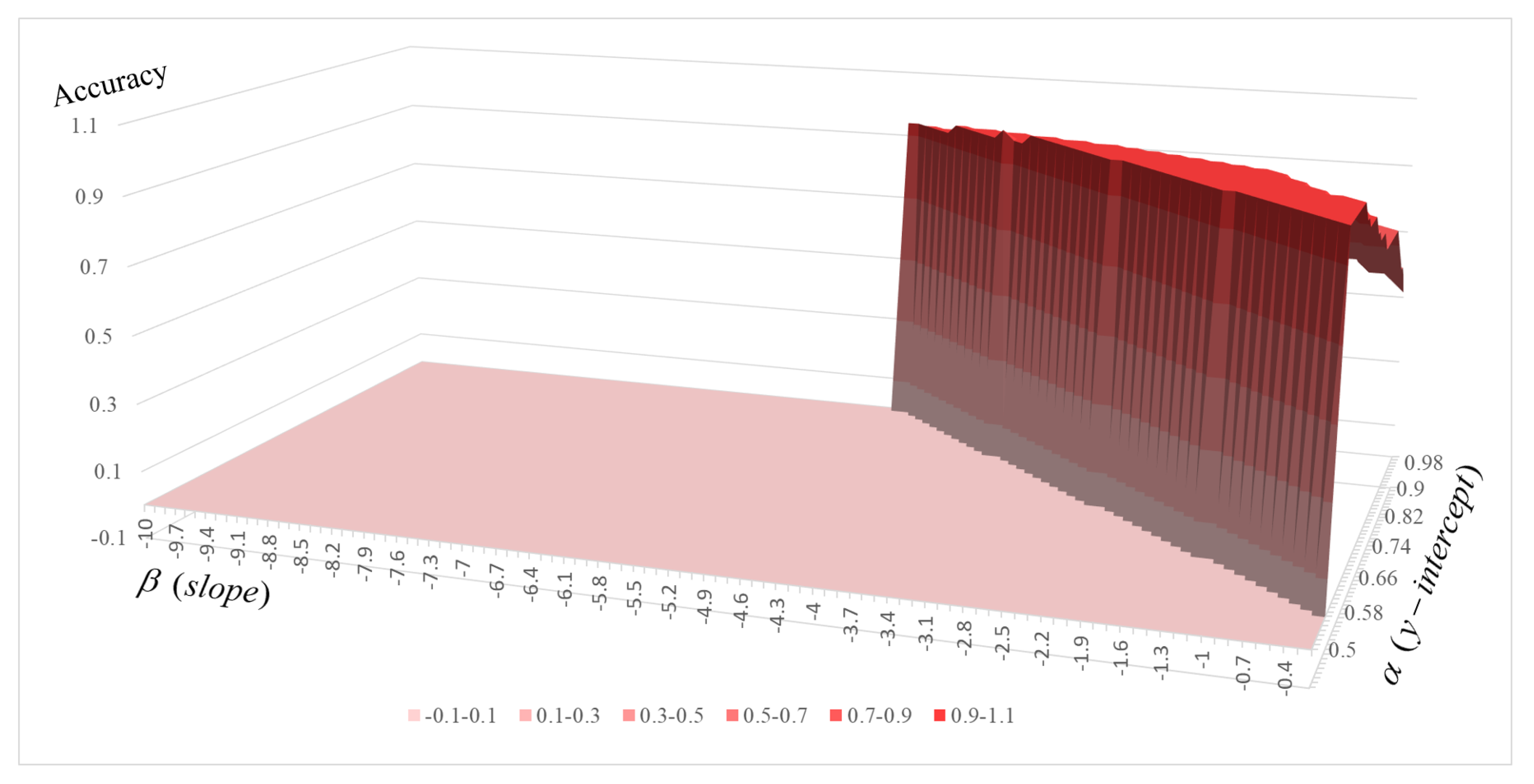
denote thresholds. In (4), we determine the optimal
as
where,
represents the standard deviation of the peak, and
and
be a pair of appropriately chosen constants to increase the accuracy of tracking failure detection. The accuracy versus the (
,
) plane is shown in
Figure 4.
To derive optimal
and
, we provided a video sequence containing a frame of tracking failure. We labeled the frame of tracking failure as ’failure’ and the others as ’success’. The accuracy of
was investigated at every frame for a specific pair of
. As shown in
Figure 4, accuracy of
is set to zero if the pair cannot detect tracking failure. After experiments using Visual Tracker Benchmark dataset [
29], we found that the optimal
is 0.85 and
is −2.4. Though there are slight differences among video sequences,
values are around 0.6 and
values at tracking failure points are around 0.6 as well. Therefore, we performed experiments by setting
and
as 0.6.
3.2. Re-Tracking a Disappeared Target Using Multiple Search Windows
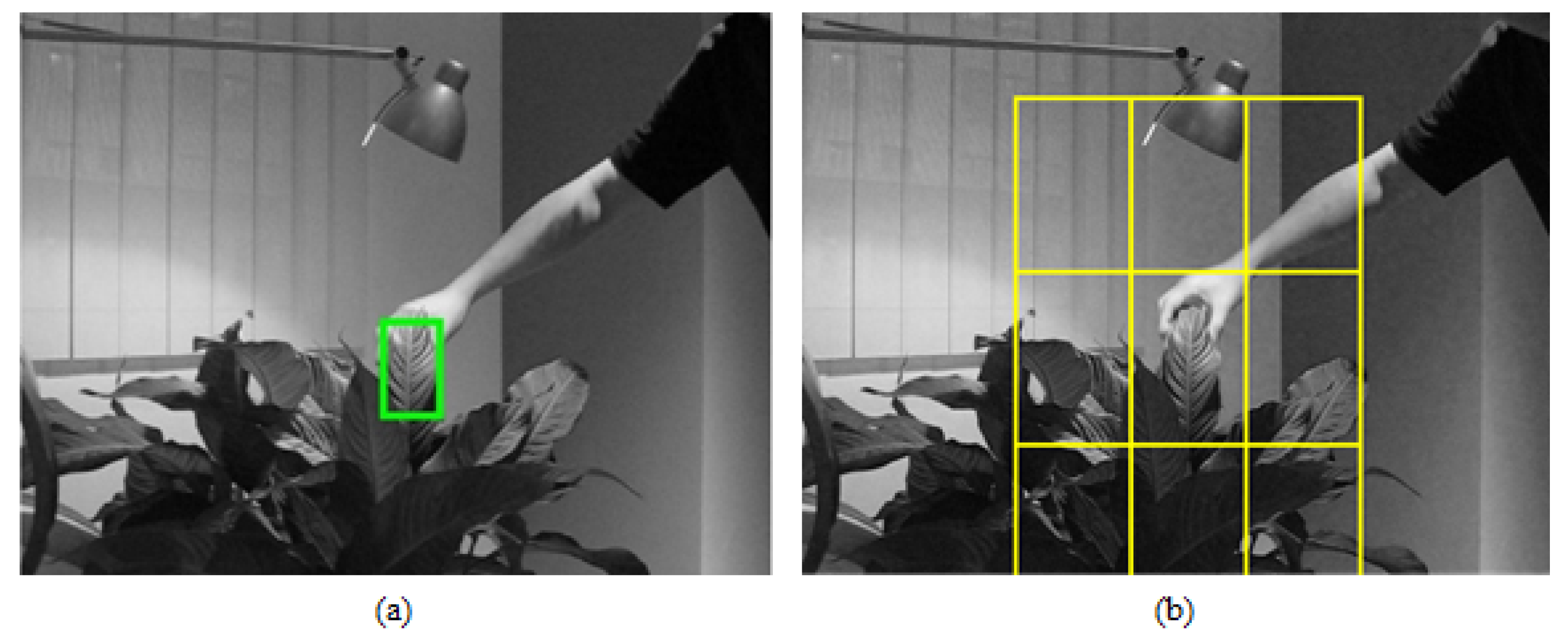
Although it is technically impossible to keep tracking if a target completely disappears in a scene, we assume that the target appears again in the neighborhood of where it disappeared. To re-start tracking a disappeared target, multiple search windows are deployed around the position where the target disappeared. During the re-tracking process, we do not update target appearance. For example, tracking failure due to occlusion is predicted as shown in
Figure 5a, then multiple search windows will be deployed as shown in
Figure 5b. Response map and peak value is generated from each search window, and the tracker starts tracking again if the target is captured in any of those search windows. We reduced computational loads by giving priority to these search windows, details are explained in the next section. Desired results could be derived by re-tracking the target from a peak point at which condition
is met in any of multiple search windows.
3.3. Prioritization of Search Windows Based on Motion Vectors
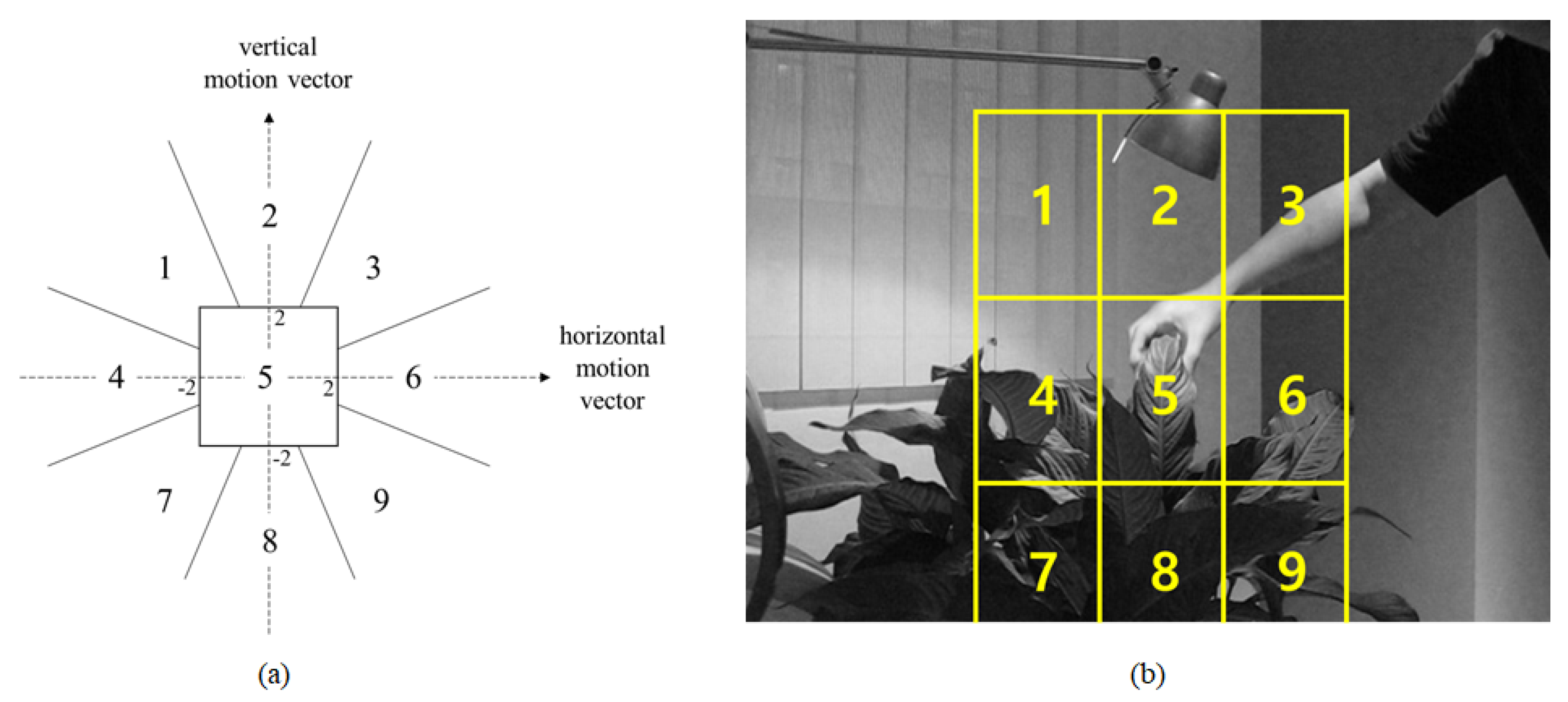
In many practical cases such as watching pedestrians or cars with CCTV, targets show linear movements for a number of frames. It means that movements of targets in the next frame can be predicted by analyzing recent movements of the targets. For this, we analyze movements of the targets by averaging motion vectors of the targets from recent 3 frames as expressed in Equation (6)
and denote horizontal coordinates changes and vertical coordinates changes of the target in ith frame and n denotes current frame number.
We separate values of motion vectors being analyzed during tracking into 9 regions as shown in
Figure 6a. If absolute values of x and y of a motion vector are smaller than 2, it means there are no significant movements so that the motion vector belongs to region number 5. In other cases, each motion vector belongs to each region based on its direction. And each region of motion vector is associated with each search window as shown in
Figure 6b. As tracking failure is detected, response map is generated in the search window which is associated with region of current motion vector of the target first, computational load can be reduced by skipping other search windows if the target is re-captured in the preferred search window.
4. Experimental Results
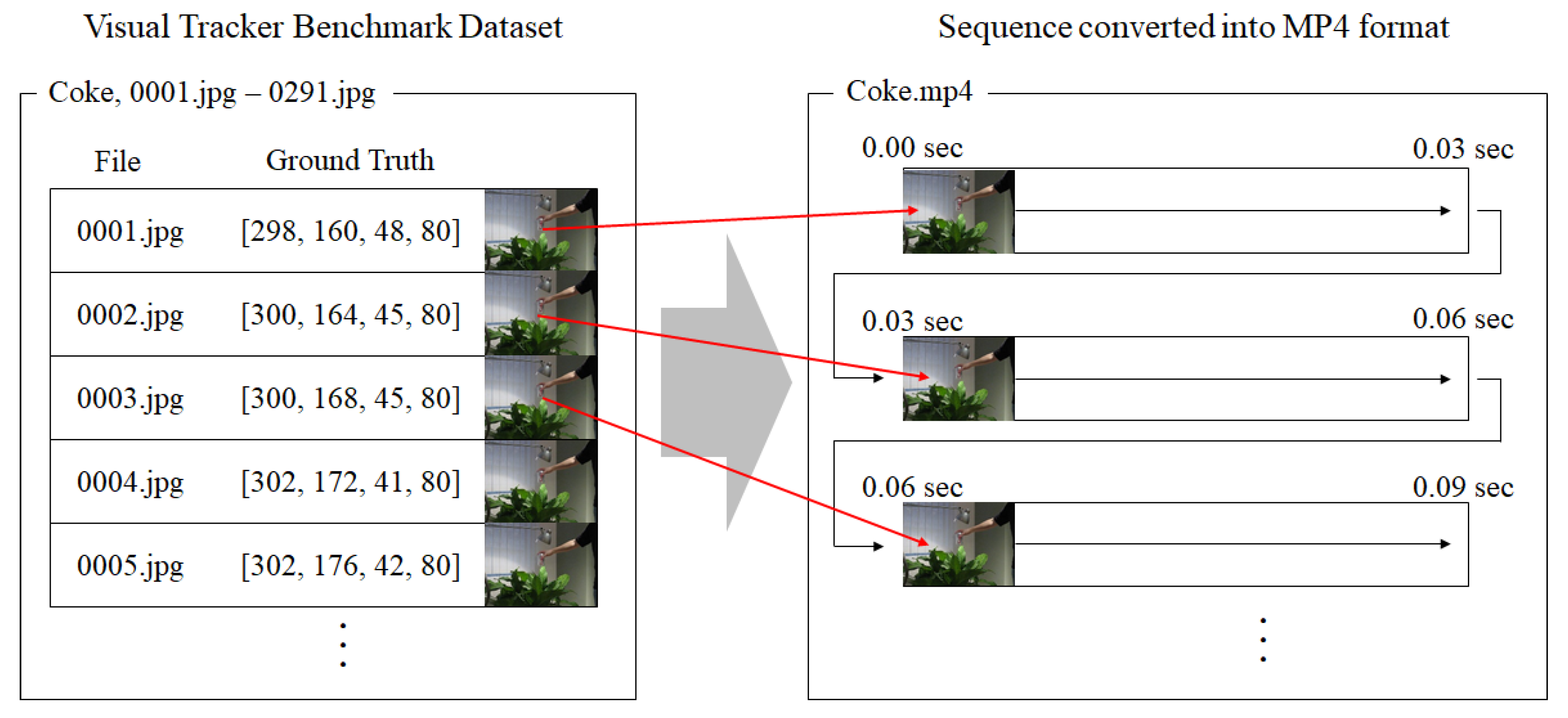
To establish streaming environment, images files in Visual Tracker Benchmark dataset [
29] were converted into movie clips in MPEG-4 format. Each image has time stamp interval of 0.03 s so that the converted movie clips are played at 33.3 frame per second as shown in
Figure 7.
We acquired additional test videos of routine street scenes using a CCTV over the street, called CAU_Ped1, CAU_Ped2, CAU_Ped3 and CAU_Ped4. Those street scenes are suitable to evaluate the proposed method because some targets are completely occluded by other pedestrians, vehicles and trees very often.
In image file-based datasets, ground truth is provided for each image as shown in
Figure 7. Each value of ground truth denotes
x-coordinate,
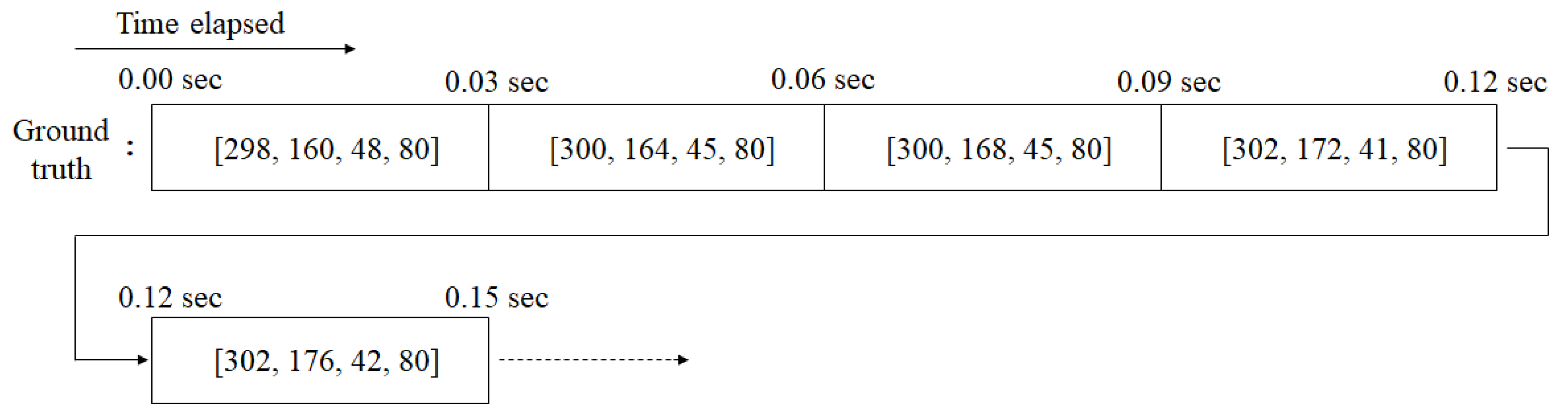
y-coordinate, width and height of the target. On the other hand, ground truth is provided for a certain period in the streaming condition as shown in
Figure 8. Spatial location of the target estimated by the tracker is saved with elapsed time, and evaluated by being compared to the time-based ground truth. In this work, we used a PC equipped with an Intel i7 8700K CPU and GTX 1080ti.
4.1. Tracking Performance of Deep Feature Based Tracker and the Proposed Method Based Tracker
Galoogahi et al. evaluated handcrafted feature-based trackers and deep feature-based trackers using their own datasets [
6]. In that evaluation, MDNet-based tracker provided the highest accuracy at the cost of a slow processing speed, which is a common problem of various deep feature-based trackers. Under the streaming condition, the processing speed of a tracker is directly related to the tracking accuracy. In other word, a slow tracker loses a number of frames for each tracking period, which results in accuracy degradation.
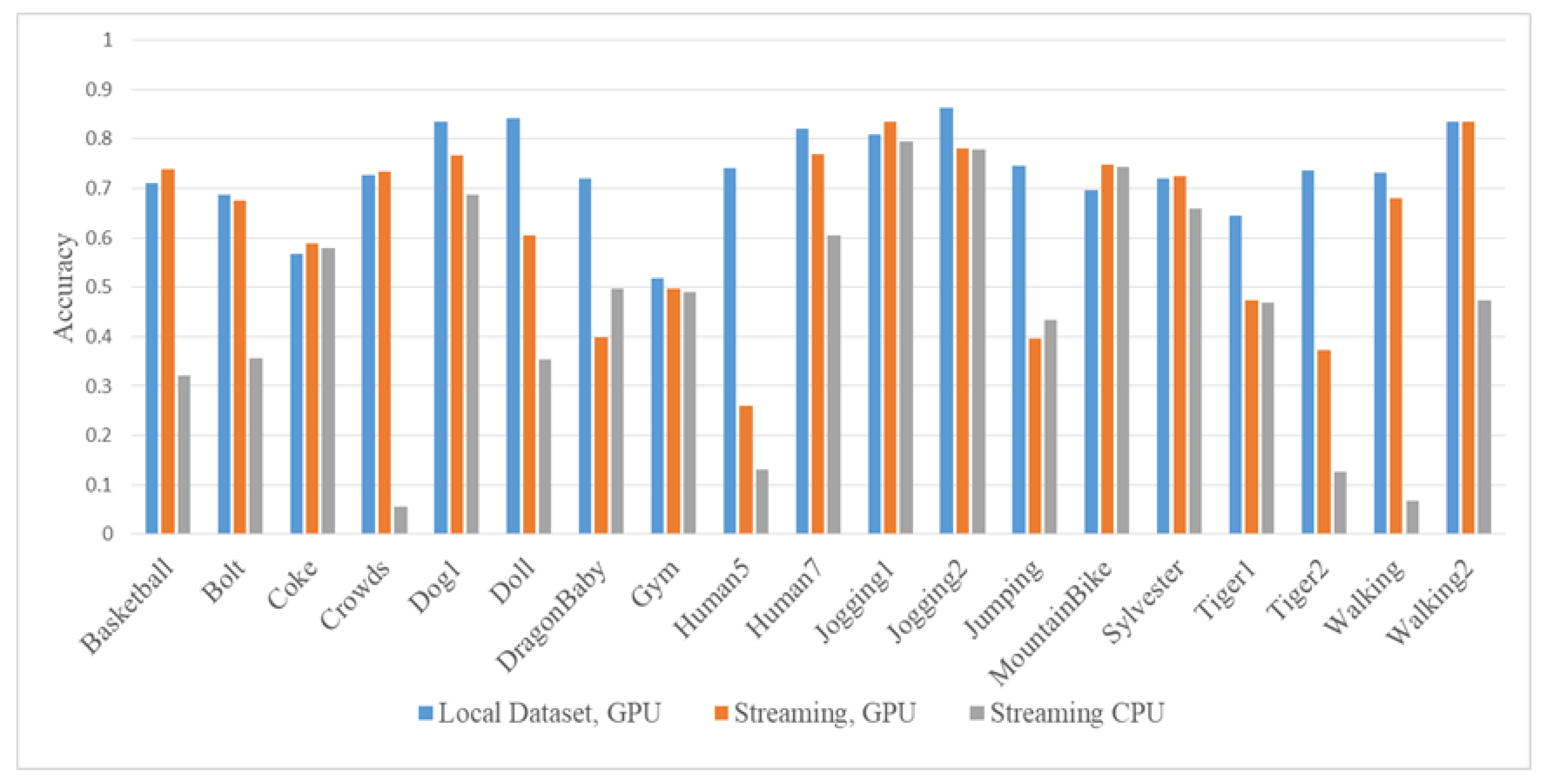
In evaluating the MDNet-based tracker, tracking accuracy was measured under three conditions including (i) local dataset using a GPU, (ii) streaming sequences using a GPU, and (iii) streaming sequences using only CPU. Intersection over Unions (IoUs) are collected from each frame and average of them was used as the final accuracy for each dataset. As shown in
Figure 9, the accuracy of tracking was significantly decreased using only CPU under the streaming condition, which demonstrated that the speed of tracker is an important factor to determine the accuracy in the streaming condition.
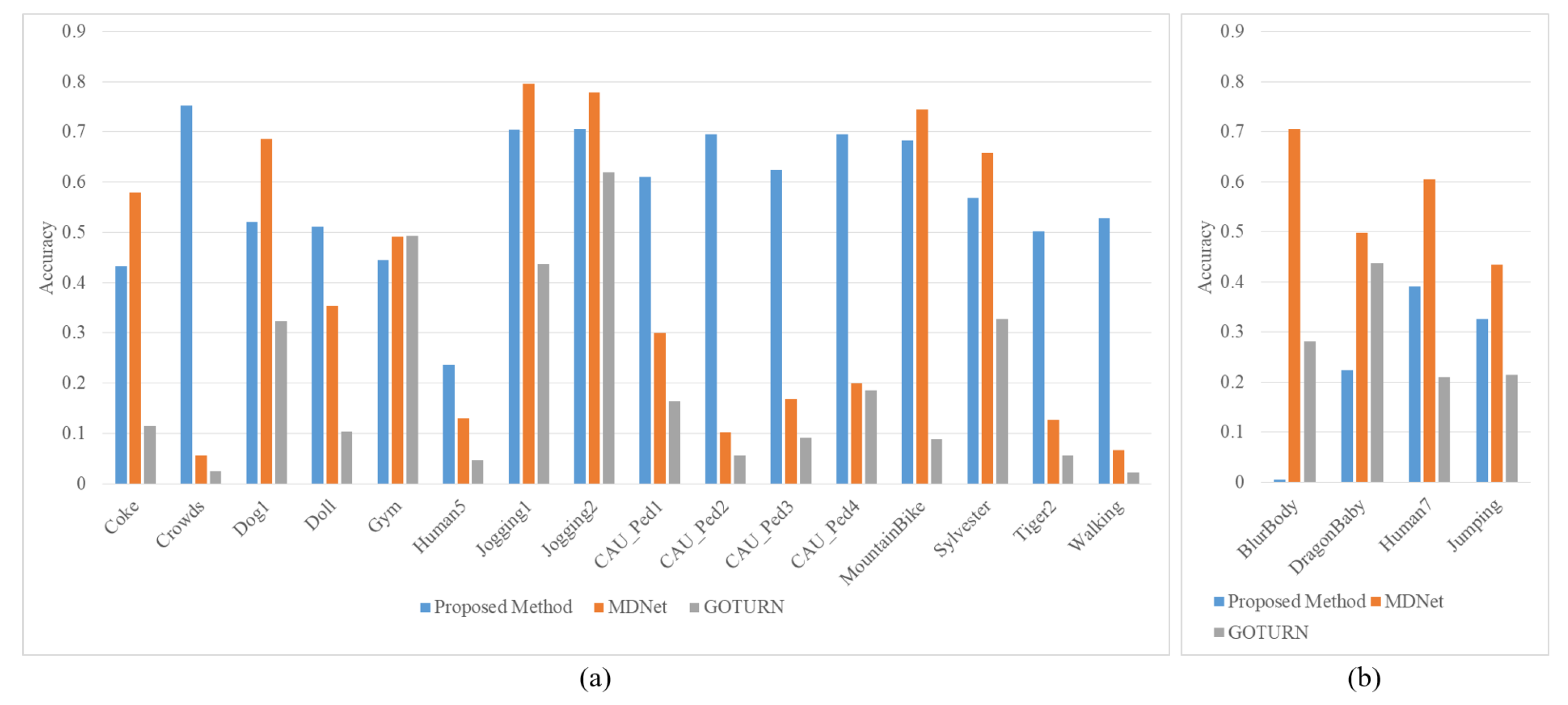
We compared the accuracy of the proposed method, MDnet-based tracker and GOTURN-based tracker under a streaming condition as shown in
Figure 10. More specifically,
Figure 10a shows that the proposed method yielded an acceptable accuracy, where the position of targets drastically change and the reduced frame rate degrades the tracking accuracy. Some sequences include challenging scenes such as occlusions or blurring, which requires tracking failure detection and restarting the tracking process after detecting the failure. In CAU_Ped1, CAU_Ped2, CAU_Ped3 and CAU_Ped4, videos recorded by CCTV watching pedestrians on the street, occlusions frequently occur. For that case, the proposed tracker has been proved suitable for those applications.
On the other hand, deep feature-based trackers can successfully track a continuously blurred and slightly moving target which is still close to the disappearing location as shown in
Figure 10b. In that case, the proposed method keeps spending time for the re-tracking process because tracking failures are detected with a degraded accuracy.
In real applications, a low processing speed would directly degrade tracking accuracy because a camera cannot follow the target by itself.
4.2. Tracking Performance of the Proposed Method Based Tracker and Original KCF Based Tracker
We found meaningful improvements in the sense of tracking accuracy from evaluations performed using the proposed tracker and the original KCF tracker. As shown in
Figure 11a, in evaluation using various datasets, the original KCF tracker failed in tracking while the proposed tracker performed successful tracking and yielded improved tracking accuracy. At least one challenging scene is included in these sequences, the proposed tracker outperformed original KCF tracker because of the re-tracking process. The proposed tracker and the original KCF tracker yielded comparable results in some other datasets in which both trackers have successfully tracked the targets as shown in
Figure 11b. Lastly, both of trackers have failed in tracking in datasets named DragonBaby and Jumping where the targets are moving rapidly as shown in
Figure 11c.
4.3. Re-Tracking Steps on Tracking Failures
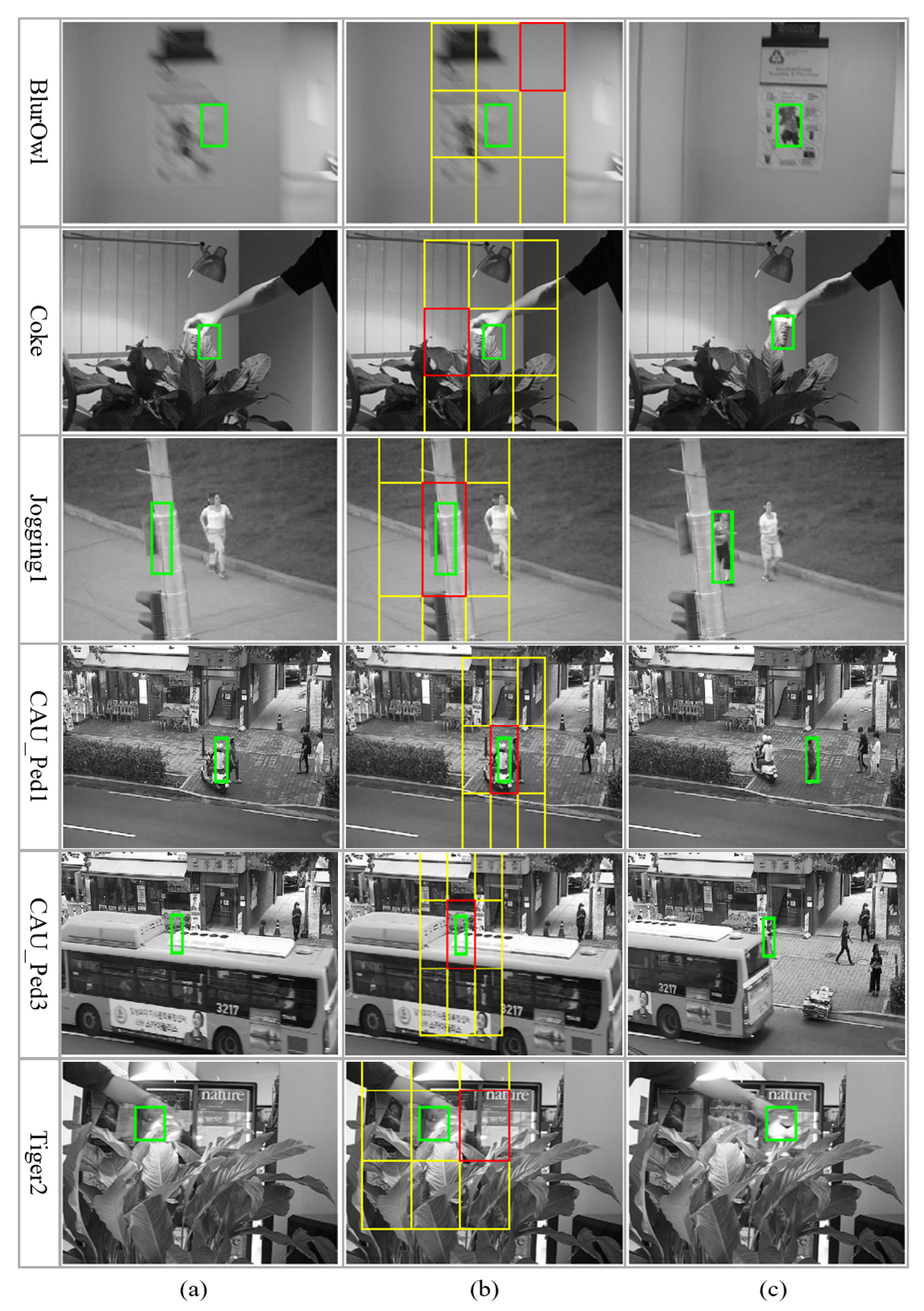
Figure 12 shows how the proposed method re-capture the target when tracking failure occurred.
Figure 12a shows tracking failures in different sequences. The tracking failure is detected and multiple search windows are deployed as shown in
Figure 12b. A red search window out of nine neighboring search windows is shown in
Figure 12b, which represents the preferred search window. Tracking process in other search windows can be skipped if the target is captured in the preferred search window. In datasets BlurOwl and Coke, there is no advantage of preferred search windows because of irregular movements of the targets. On the other hand in Jogging1, CAU_Ped1, CAU_Ped3 and Tiger2, there are linear movements of the targets so that computational loads could be reduced as the targets were captured in the preferred search windows. As the targets are captured in the preferred search windows or other search windows, tracking is re-started from the corresponding position as shown in
Figure 12c.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











