1. Introduction
As a large-scale reciprocating power machine, a diesel engine is widely used in industrial, military, and agricultural fields. Because it has complex mechanical structure, some faults also exhibit diversity and complexity. The major faults reported include misfire, piston slap, knock, fuel injection fault, and valve fault. Among them, valve fault is one of the most common fault modes in diesel engines. The valve clearance of a diesel engine, which controls the intake and exhaust of the cylinder, usually exceeds the normal value due to wear or faulty adjustment. The increase or decrease of valve clearance will affect the performance and reliability of the entire equipment and cause unnecessary economy loss. Therefore, it is very important to apply the techniques of condition monitoring and fault diagnosis on diesel engines to ensure the safety and reliability during operation process [
1,
2].
The common methods used for the research of fault diagnosis are divided into two types. One type of research is to identify the state of the valve, to distinguish between good and faulty valves, and to indicate abnormal alarms. Another is to directly diagnose the specific fault type of valve [
3]. The first type is the widest research area and is very important for timely warning when the equipment has a problem. This article includes two layers of content. Besides the first type, methods for identifying specific fault types of valve clearance on the premise of abnormal warning are also discussed here.
Measurement methods used for condition monitoring and diagnosis of diesel engines mainly include vibration, acoustic emission, cylinder pressure, etc., which has shown good performance in the signal processing field. In all of these ways, vibration signal on the surface of cylinder head of diesel engine is easy to obtain, and contains abundant state information of a machine, such as in-cylinder combustion, valve opening, and valve closing [
4]. However, due to the large number of excitation sources and the influence of external noise, vibration signal is usually non-stationary and non-linear [
5]. Thus, the methods used in the past are not applicable, including fast Fourier transform (FFT) analysis, cepstrum analysis, the envelope spectra technique, and higher-order statistics [
6]. Researchers have tried various ways to extract effective feature parameters from surface vibration signals. Si et al. [
7] used the wavelet packet method to analyze diesel engine valve seating’s excitation response signal segment, and diagnosed the valve clearance fault by calculating the root mean square (RMS) value of the energy. Shen et al. [
8] used empirical mode decomposition (EMD) and support vector machine (SVM) to extract the energy characteristics of modal components to identify the state of diesel engine. Zhang et al. [
9] used the local mean decomposition (LMD) method to extract the feature vector of a cylinder head’s vibration signal and applied SVM to identify the valve fault. However, wavelet packet decomposition needs to determine the proper wavelet basis and the number of decomposition layers. Although EMD and LMD methods can achieve the adaptive decomposition process of non-stationary signals, they all have a mode mixing phenomenon, and their robustness is poor. In order to overcome this shortcoming, the ensemble empirical mode decomposition (EEMD) method was proposed, so it had received extensive attention in the field of fault diagnosis. However, white noise was still left in the signal decomposed by the EEMD method. In order to eliminate white noise, the average number of integrations also increased, which resulted in lower data processing efficiency [
10].
Recently, a new non-stationary signal processing method called the variational mode decomposition (VMD) algorithm has been proposed. VMD can determine the relevant bands of fault feature and obtain the modes concurrently by decomposing the original signal, separating the signal into several intrinsic mode functions (IMFs) [
11]. Because of non-iterative decomposition and adaptively-chosen bands, VMD is able to overcome the mode mixing and misclassification problem caused by fixing band allocation [
12]. At the same time, it also has better robustness and higher data processing efficiency. Therefore, since it was proposed, the VMD method has become a hot research issue and been successfully applied to the field of rotating machines [
13,
14]. However, little research was carried out on the use of these techniques in reciprocating machines, such as diesel engines. In the research reported in this paper, the VMD method is studied to verify its ability to handle a cylinder head’s vibration signals in diesel engines.
Nevertheless, due to the complexity of diesel engines, it is difficult to identify the conditions or faults from a single feature obtained from the IMFs [
15]. To better reflect the diesel engine’s health states, features at different scales should be extracted from the original acceleration signal. Combining time domain and frequency domain feature parameters, 18-dimensional feature vectors are constructed in this paper.
Commonly, a classification algorithm is used for fault identification after feature extraction. The Random forest (RF) algorithm is one of the widely used classifiers in data mining techniques. It is more accurate and efficient when working with large database. The RF classifier is a combination of many decision trees. Decision trees are grown by a binary partitioning method to make for easy interpretation [
16]. Compared to single classifier such as decision tree, neural network, support vector machine, and so on, RF has better stability and generalization. It can not only perform multi-category pattern recognition accurately, but also can sort multi-dimensional features according to the importance score. Proper reduction to features can keep the useful information to the maximum extent, eliminate useless information, and improve the efficiency of the algorithm. The RF supervised classifier has the above characteristics at the same time, so this algorithm is used to identify faults and reduce dimensions.
This paper presented a new diesel engine valve fault diagnosis method based on the VMD and the RF algorithm. Based on the two-time decomposition strategy, the signal was decomposed by the VMD method, and the penalty function α value was determined by the criterion for optimal selection. After acquiring several IMF signals, the spectral energy characteristics of the IMFs were extracted. In addition, we also combined the time domain features and frequency domain features of the original signals to form an 18-dimensional feature vector. With the RF used for feature selection and the low-dimensional features used as the input parameters of the RF classifier, the alarm of the abnormal valve state of the diesel engine and the identification of the three types of valve clearance faults were finally realized. The analysis of the actual data under the condition of variable speed indicated that the combination of VMD and RF was an effective method for the diagnosis of valve clearance faults. The main contribution of this work could be summarized as follows: (1) Based on reducing the energy leakage of the IMF component frequency spectrum and the minimum IMF component of power spectral entropy, the VMD penalty function
α was optimized; (2) The RF algorithm was adopted to rank the importance of all extracted features, so as to reduce dimensions and improve calculation efficiency; (3) The combined VMD and RF method improved the accuracy of fault identification. The organization of this paper is as follows:
Section 2 introduces the diesel engine experimental test system.
Section 3 introduces the principle of diagnosis based on optimized VMD-RF algorithm. The examples of application are described in
Section 4. Finally, conclusions are given in
Section 5.
2. Diesel Engine Experimental Test System
In order to verify the effectiveness of the proposed method in valve fault diagnosis, all the experiments would be conducted on a TBD234V12 direct injection diesel engine. The increase of valve clearance would lead to the increase of impact force when the valve was seated. According to the transmission path of vibration, the vibration generated by the valve was finally reflected on the surface of diesel engine cylinder head. Therefore, the vibration measurement point was determined to be the upper surface of the cylinder head of a diesel engine. The diesel engine has 12 cylinders which were arranged in two columns, named column A and column B. The major features of the diesel engine were summarized in
Table 1. The vibration signals and pulse signals were sampled using a data acquisition (DAQ) system, in which the DAQ card had a 16-bit analog-to-digital converter (ADC) resolution and a maximum sampling rate of 102.4 KS/s per channel, and up to 32 analog inputs. Signals were processed by a computer with 16 GB of random access memory (RAM), and a 3.10 GHz Intel i7 processor. The interconnection of the main test rig components was shown in
Figure 1.
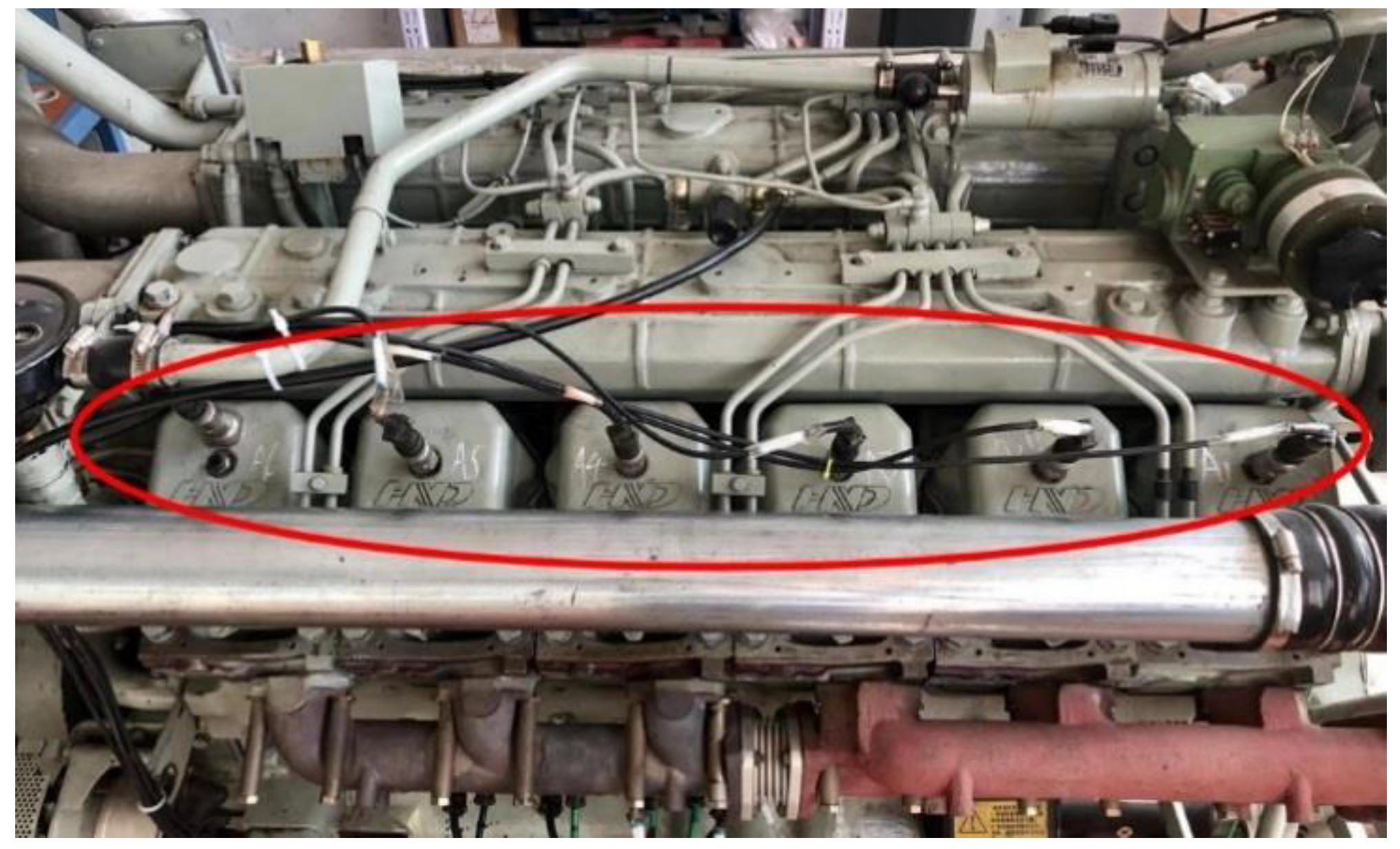
The simulation experiment of valve faults was carried out under variable speed conditions with speeds of 1500, 1800, and 2100 r/min, respectively, and the load was kept constant at 1000 N·m. The accelerometer was mounted on the cylinder head through a screw connection. The sampling frequency was 51,200 Hz. The installation position of acceleration sensor is shown in
Figure 2. In addition, a key phase sensor (i.e., an eddy current sensor) was mounted on the flywheel. Each time the diesel crankshaft made one revolution, the key phase pulse signals used to identify the start of the duty cycle would be recorded. The main parameters of the acceleration sensor and the eddy current sensor were shown in
Table 2 and
Table 3, respectively.
There were two groups in total, which were normal gap test and abnormal gap test. In view of the fact that the velocity and acceleration of the valve movement in the cam buffer section were small and the amount of change was small, the slight deviation of the valve clearance near the standard value would not have a significant impact on the operation of the unit. Therefore, a total of six valve clearances were set in the valve abnormality test group. The status and specific parameter settings are shown in
Table 4. First, we needed to loosen the lock nut above the B1 to B6 cylinder valve in column B, then turned the adjusting screw to simulate the six types of faults according to the cylinder number sequence in the table: small intake valve clearance increment (fault 1), large intake valve clearance increment (fault 2), small exhaust valve clearance increment (fault 3), large exhaust valve clearance increment (fault 4), small intake and exhaust valve clearance increment (fault 5), and large intake and exhaust valves clearance increment (fault 6).
4. Examples of Application
4.1. Theoretical Analysis of Valve Train
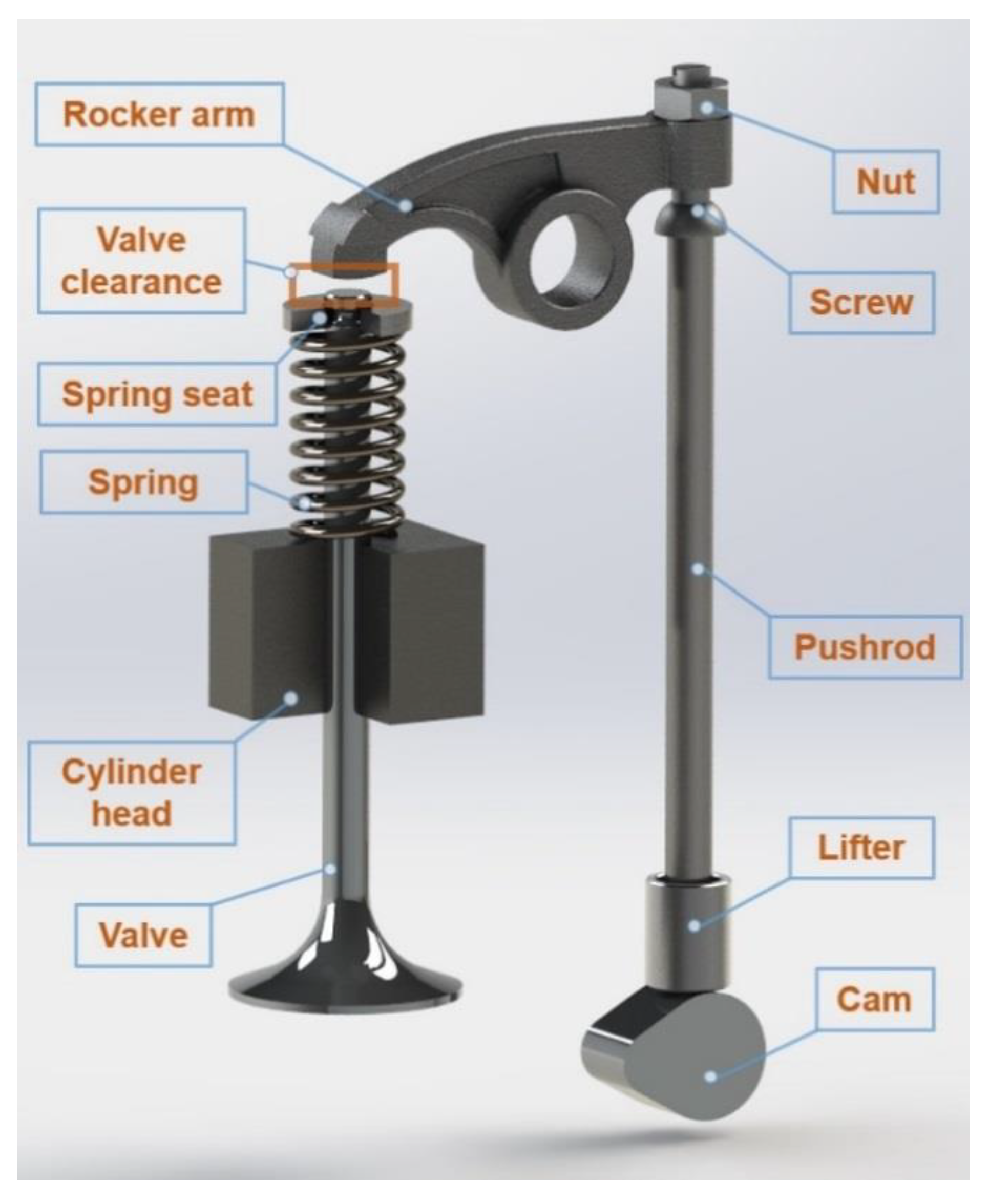
The valves allow mixture of air and fuel to enter into a cylinder’s compartment and the exhaust of residue to leave the cylinder’s compartment after one combustion cycle of a cylinder has been completed. As shown in
Figure 7, a camshaft uses a cam to push against a valve so that it can be opened when the camshaft is rotated to its specific profile. A spring located on top of the valve returns it to the closed position. The lifting of the valve depends on the cam profile and the valve clearance [
24]. When the valve has excessive clearance, the energy of vibration induced by impacting during the process of the valve opening and closing increases [
25]. Therefore, vibration energy could be considered as an identification feature for valve clearance’s fault.
However, if an inspector uses only amplitude or energy of vibration signals to observe whether the clearance of the valve is proper, then the result could be misleading. A change in the diesel engine’s operating condition, such as working at different speeds, also affects the value of amplitude or vibration energy. Thus, there is a need for an analysis method that can obtain stable characteristics that do not change with the rotational speed of diesel engine to characterize changes in valve clearance.
4.2. Feature Extraction
These are considered as a pattern recognition problem which consists of three phases namely, feature extraction, feature selection and feature classification. Among them, feature extraction is a key step in fault diagnosis. It usually involves two important aspects: one is that the extracted features should be sensitive to the target fault, and the other is that they should be insensitive or less sensitive to other conditions. For this article, ideal characteristics should be able to effectively identify the fault of abnormal valve clearance under different rotational speed conditions of the diesel engine, that is, stability to the rotational speed conditions. The main purpose of this work was to develop a method to obtain desirable features for detecting and diagnosing abnormal valve clearance.
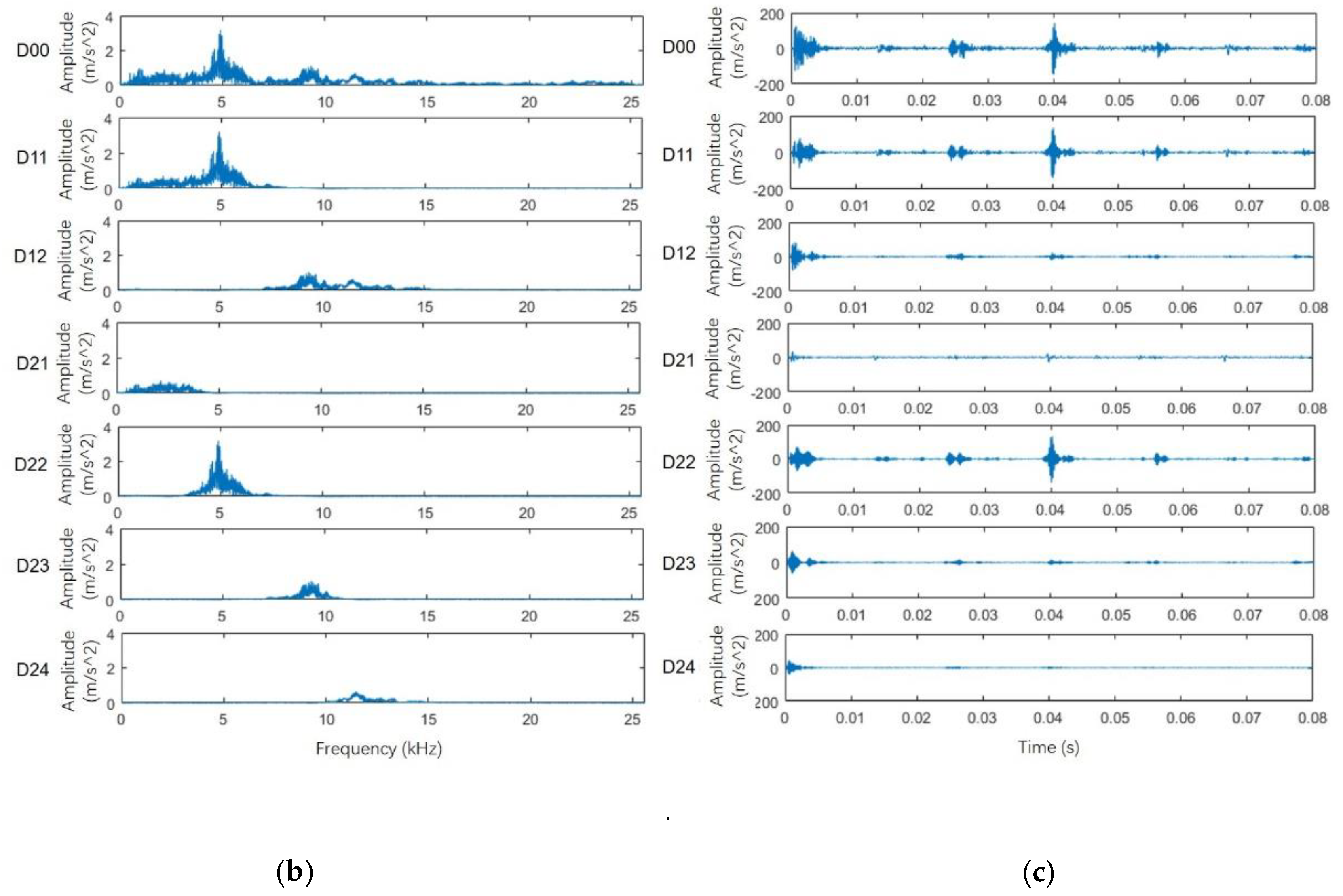
When the valve clearance became abnormal, the force of the valve impacting on valve seat changed, and the spectral energy of each frequency component in the signal changed accordingly. The IMFs produced by VMD represent a set of stationary signals in feature scales, of which the spectrum energy could be used to characterize different working states of valves. Therefore, the original signal was decomposed into D21, D22, D23, and D24 by the two-time decomposition strategy, and their spectral energies were taken as characteristic parameters.
Diesel engine’s vibration signal has the problems of local impact, wide frequency band distribution, and being susceptible to external noise. If we only used the VMD method to decompose the vibration signal, the characteristic information of valve fault could not be completely extracted. In order to fully reflect the working state of the valve, RMS value, peak value, peak-to-peak value, waveform index, pulse index, K-factor, crest factor, kurtosis, and skewness might be taken as time domain characteristic parameters representing the state of the vibration signal. For the valve, when the clearance was abnormal, the main frequency of the cylinder head’s vibration signal might move to high or low frequency, and its distribution was also an effective parameter reflecting the working state of the valve. Therefore, the center of gravity frequency, mean square frequency, frequency variance, RMS frequency, and standard deviation of frequency were used as frequency domain characteristics to reflect different valve’s operating conditions.
To sum up, this paper proposed to extract the spectral energy characteristics of IMFs, and combined the time domain and frequency domain features to comprehensively select feature parameters for establishing the feature vectors. The specific steps are as follows:
Acquiring experimental data for normal and fault conditions of diesel engine’s valves.
Studying the frequency components of the vibration signal. After determining the penalty function by the criterion for optimal selection, each group of vibration signals was decomposed by the VMD method according to the two-time decomposition strategy.
The IMFs performed Fourier transform to calculate the corresponding spectral energy
Ei and extracted the spectral energy characteristics. The formula is as follows:
Calculating the RMS value, peak value, peak-to-peak value, waveform index, pulse index, K factor, crest factor, kurtosis, and skewness of each group of signals.
Calculating the gravity frequency, mean square frequency, frequency variance, RMS frequency, and standard deviation of frequency of each group of signals.
Integrating spectrum energy of IMFs, nine time domain features and five frequency domain features, a total of 18-dimensional features were used to construct feature vectors.
4.3. Feature Selection
Since each feature parameter had to be calculated several times during the training and testing process, RF algorithm was complicated and had much calculation. If there were a lot of decision trees, the operation efficiency would be very low. Therefore, in practical applications, in order to improve the execution efficiency of the algorithm, feature selection ways needed to be performed on the initial feature vectors.
In order to reflect the classification effect of the method described in this paper under the condition of variable speed, the sample database was constructed by mixing the characteristic data under different working conditions. From all normal and faulty data obtained from experimental testing, 70% were randomly selected as the training set, and the remaining 30% as the test set. The training set data was input into the RF algorithm. There were two important parameters in the RF model, which were the number of decision trees and the number of random feature variables.
Figure 8 showed the relationship between OOB error and number of decision trees. It could be seen from the figure that, with the increase of the number of decision trees, the OOB error gradually tended to be stable. Taking into account the accuracy and computational efficiency, 100 decision trees were selected. The random feature variable was called mtry which took the default value
, where
M was the total number of features.
After the establishment of the RF model, random disturbances were applied to the individual characteristic variables of all the samples of the OOB (Out-of-Bag) data, and the importance score of the individual characteristic variable was calculated by Formula (6).
Figure 9 showed the importance score’s ranking of all the characteristic variables.
According to
Figure 9, the importance scores of the waveform index and the pulse index were very low. In order to reduce the redundancy of the feature parameters, only the first 15 feature parameters with high importance scores were retained. However, the feature dimension could not be too small, otherwise it was difficult to accurately detect the difference between distinct classification targets. Therefore, according to the order of importance scores from big to small, three to 15 dimensional feature vectors were selected in order to identify the abnormal valve condition.
Figure 10 showed the average recognition rate of the valve condition in different dimensions of feature.
Figure 10 showed that, as the dimension of the feature vector increases, the average recognition rate gradually increased. When the dimension of the feature was 8, the average recognition rate reached the maximum and remained basically constant, indicating that the dimension of the optimal feature vector was 8, which could significantly highlight the difference between normal and abnormal valve conditions. Therefore, we chose 0.7 as the threshold to reduce the dimension of the initial 18-dimensional feature vector to obtain the optimal eigenvector. According to the order of importance scores, the D22 spectral energy, D21 spectral energy, D23 spectral energy, skewness, RMS value, K factor, D24 spectral energy, and peak-to-peak value were the characteristic parameters which contributed the most to the RF model’s classification effect.
Table 5 showed the optimal eigenvectors for each valve state of the diesel engine. Due to space limitations, two samples were listed for each valve state. The optimal eigenvector was input into the RF algorithm to establish a classifier model which could identify the normal and abnormal valve state.
4.4. Valve Abnormality Alarm and Fault Diagnosis
In this experiment, 490 data were collected under each working condition of the diesel engine. Three different operating speeds (1500, 1800, and 2100 rpm) were investigated, and for every normal or fault conditions, there were 50 training and 20 test samples.
For the importance of fault alarm in the actual diesel engine, the normal or abnormal state should be identified first. So online monitoring system on site could timely give a warning to the machine protectors when the valve clearance was abnormal. A total of 420 groups of characteristic data in the test set were input into the RF algorithm for abnormal alarm processing, among which 60 groups were normal characteristic data and the remaining 360 groups were abnormal characteristic data. The comparison result of the classification effect of the RF reduction dimension and the initial feature vector was shown in
Table 6.
The above analysis showed that the use of the RF algorithm for feature selection could retain the main feature information, that was, while reducing the data dimension, the recognition rate basically remained the same, and the time was significantly reduced, effectively improving the efficiency of fault diagnosis. In addition, this method ensured that the average recognition accuracy was above 90%, and could accurately make an alarm when the valve clearance became abnormal.
In order to help the on-site personnel to diagnose the fault type preliminary, under the premise that the system had made an abnormal alarm, it was necessary to make further decisions on what fault type the valve specifically belonged to. For the 1260 groups of the abnormal valve data, there were 420 groups data of increasing intake valve clearance (fault 1 and fault 2), 420 groups of increasing exhaust valve clearance (fault 3 and fault 4), and 420 groups of increasing both intake and exhaust valve clearance (fault 5 and fault 6). A total of 360 groups of data are randomly selected as the test set, and the number of each fault state data is 120 groups. The rest of the data was used as a training set. The RF classifier was again constructed using the training set data. Furthermore, the confusion matrix was shown in
Table 7.
According to
Table 7, after the system alarms, it could accurately identify the specific fault type of the valve clearance as well. Among them, only nine intake valve clearance faults were diagnosed as other faults, and the recognition rate reached 92.5%. Only eight exhaust valve clearance faults were misdiagnosed as other faults, and the accuracy reached 93.33%. The situation of both valve clearance faults was the same as the exhaust valve clearance fault. The recognition rate of the overall valve fault reached 93.06% and satisfactory results were obtained under different speed conditions.
In order to highlight the advantages of the fault diagnosis method based on VMD and RF, this method was compared with the other two methods, as shown in
Table 8.
As could be seen from
Table 8, the combination method of statistical characteristics in the time and frequency domain and KNN was poor in the performance of the fault identification rate for the increase of exhaust valve clearance. Although the performance of EMD and the decision tree algorithm in the recognition accuracy of three faults was not bad, the average recognition rate was only 84.76%. The combined method of VMD and RF presented in this paper performed well in the recognition rate of three valve clearance faults, and the average recognition rate was obviously higher than the other two methods.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}