Detecting and Solving Tube Entanglement in Bin Picking Operations



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
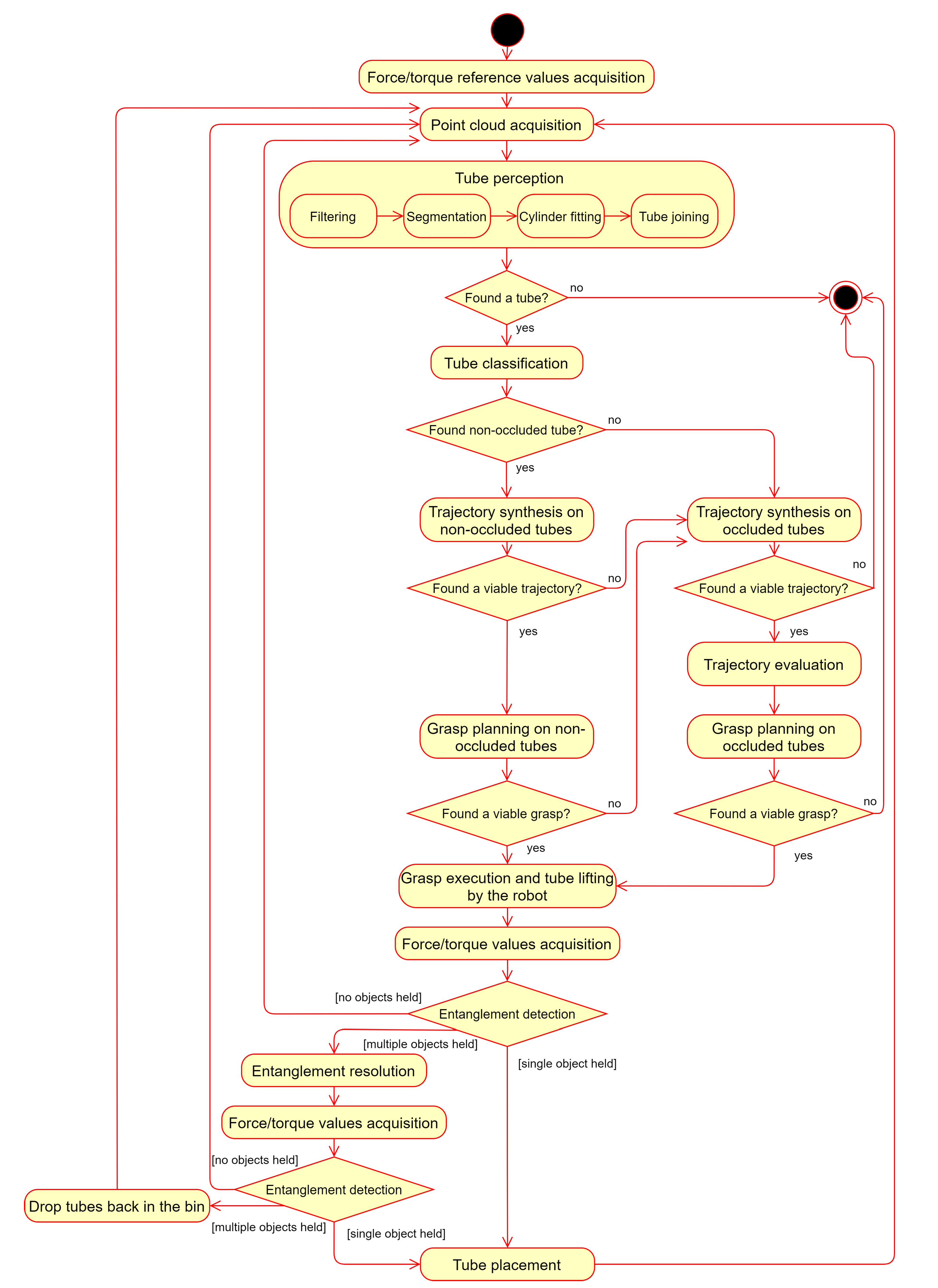
3. Bin Picking Algorithm
3.1. Tube Modeling
- The cylinder endpoints still belong to distinct tubes.
- The pair’s Euclidean and angular distances are both below a certain threshold.
- There is no visible gap between both endpoints on the acquired point cloud’s representation as a depth image, from the sensor’s point of view (visibility constraint). This was implemented by finding the midpoint of both endpoint projections on the depth image and determining if there is a pixel in a small neighborhood around this midpoint that has less depth (i.e., is closer to the sensor) than the maximum depth among both endpoints.
- The length of the combined tube is below a certain optional maximum threshold (length constraint).
3.2. Tube Classification
3.3. Trajectory Planning
3.3.1. Trajectory Synthesis
3.3.2. Trajectory Evaluation
3.4. Grasp Planning
3.4.1. Grasp Synthesis
3.4.2. Grasp Evaluation
3.5. Entanglement Detection
| Algorithm 1 Entanglement detection algorithm. |
Input: - Reference z force (N) - Actual z force (N) - Tube mass (kg) - Tolerance value for the force (N) Output: - Either , or
|
3.6. Entanglement Resolution
3.7. Tube Placement
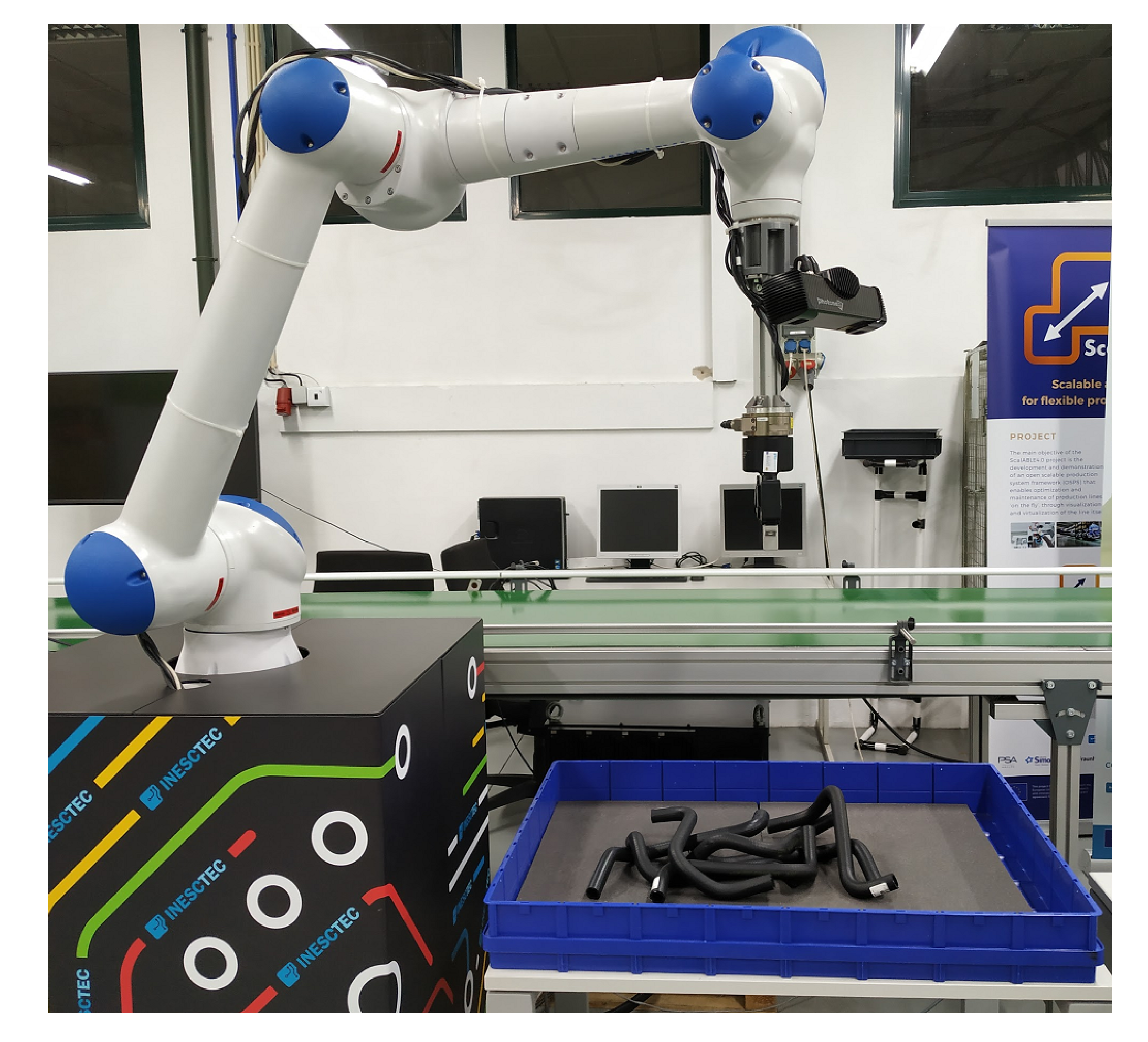
4. Experiments
4.1. Overview
4.2. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alonso, M.; Izaguirre, A.; Graña, M. Current Research Trends in Robot Grasping and Bin Picking. In Proceedings of the International Joint Conference SOCO’18-CISIS’18-ICEUTE’18, San Sebastián, Spain, 6–8 June 2018; Springer: New York, NY, USA, 2019; Volume 771, pp. 367–376. [Google Scholar] [CrossRef]
- Matsumura, R.; Domae, Y.; Wan, W.; Harada, K. Learning Based Robotic Bin-picking for Potentially Tangled Objects. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 7990–7997. [Google Scholar] [CrossRef]
- Leão, G.; Costa, C.M.; Sousa, A.; Veiga, G. Perception of Entangled Tubes for Automated Bin Picking. In Proceedings of the ROBOT 2019: Fourth Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; Springer: New York, NY, USA, 2019; pp. 619–631. [Google Scholar] [CrossRef]
- Bohg, J.; Morales, A.; Asfour, T.; Kragic, D. Data-Driven Grasp Synthesis—A Survey. IEEE Trans. Robot. 2013, 30, 289–309. [Google Scholar] [CrossRef] [Green Version]
- Haschke, R.; Steil, J.J.; Steuwer, I.; Ritter, H. Task-Oriented Quality Measures for Dextrous Grasping. In Proceedings of the 2005 International Symposium on Computational Intelligence in Robotics and Automation, Espoo, Finland, 27–30 June 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 689–694. [Google Scholar] [CrossRef]
- Roa, M.A.; Suárez, R. Grasp quality measures: Review and performance. Auton. Robot. 2015, 38, 65–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sahbani, A.; El-Khoury, S.; Bidaud, P. An overview of 3D object grasp synthesis algorithms. Robot. Auton. Syst. 2012, 60, 326–336. [Google Scholar] [CrossRef] [Green Version]
- Miller, A.T.; Knoop, S.; Christensen, H.I.; Allen, P.K. Automatic grasp planning using shape primitives. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 1824–1829. [Google Scholar] [CrossRef] [Green Version]
- Wong, C.K.; Lim, P.P.K.; Clist, R.; Liu, R.S. Vision Strategies for Robotic Manipulation of Natural Objects. In Proceedings of the Australasian Conference on Robotics & Automation, Sydney, Australia, 2–4 December 2009. [Google Scholar]
- Ellekilde, L.P.; Petersen, H.G. Motion planning efficient trajectories for industrial bin-picking. Int. J. Robot. Res. 2013, 32, 991–1004. [Google Scholar] [CrossRef]
- Iversen, T.F.; Ellekilde, L.P. Benchmarking motion planning algorithms for bin-picking applications. Ind. Robot 2017, 44, 189–197. [Google Scholar] [CrossRef]
- Vonásek, V.; Vick, A.; Saska, M. Motion planning with motion primitives for industrial bin picking. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef] [Green Version]
- Yanagihara, Y.; Kita, T. Parts-picking in disordered environment. In Proceedings of the IROS ’91:IEEE/RSJ International Workshop on Intelligent Robots and Systems ’91, Osaka, Japan, 3–5 November 1991; IEEE: Piscataway, NJ, USA, 1991; Volume 2, pp. 517–522. [Google Scholar] [CrossRef]
- Moreira, E.; Rocha, L.F.; Pinto, A.M.; Moreira, A.P.; Veiga, G. Assessment of Robotic Picking Operations Using a 6 Axis Force/Torque Sensor. IEEE Robot. Autom. Lett. 2016, 1, 768–775. [Google Scholar] [CrossRef]
- Chan, Y.; Yu, H.; Khurshid, R.P. Effects of Force-Torque and Tactile Haptic Modalities on Classifying the Success of Robot Manipulation Tasks. In Proceedings of the 2019 IEEE World Haptics Conference, WHC 2019, Tokyo, Japan, 9–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 586–591. [Google Scholar] [CrossRef]
- Kanoulas, D.; Lee, J.; Caldwell, D.G.; Tsagarakis, N.G. Center-of-mass-based grasp pose adaptation using 3d range and force/torque sensing. Int. J. Humanoid Robot. 2018, 15. [Google Scholar] [CrossRef] [Green Version]
- Costanzo, M.; De Maria, G.; Natale, C. Two-Fingered In-Hand Object Handling Based on Force/Tactile Feedback. IEEE Trans. Robot. 2019, 36, 157–173. [Google Scholar] [CrossRef]
- Rusu, R.B. Semantic 3D Object Maps for Everyday Manipulation in Human Living Environments. KI-Künstliche Intell. 2010, 24, 345–348. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.S.; Ramani, K. Robust principal axes determination for point-based shapes using least median of squares. Comput. Aided Des. 2009, 41, 293–305. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set A | Set B | |
|---|---|---|
| Material | Polyvinyl chloride (PVC) | Rubber |
| Curve length | 50 cm | 40 cm |
| Radius | 1.25 cm | 1.00 cm |
| Stiffness | Fully rigid | Semi-rigid |
| Weight | 55 g | 110 g |
| Phase | Parameter | Set A | Set B |
|---|---|---|---|
| Tube modeling | Cloud point size after filtering | 100,000 | |
| Tube classification | Tube minimum length | 35 cm | 30 cm |
| Trajectory synthesis | Upwards trajectory movement | 40 cm | |
| Escape trajectory first upwards movement | 2 cm | ||
| Escape trajectory second upwards movement | 40 cm | ||
| 3 cm | |||
| Grasp synthesis | Minimum distance between grasping points and cylinder bases | 2 cm | |
| Maximum allowable amount of points in the gripper’s bounding boxes | 20 | ||
| Grasp evaluation | 1 m | ||
| 0.2 | |||
| 0.5 | |||
| 0.3 | |||
| Entanglement resolution | Rotation angle | 45° | |
| Set A | 90% |
| Set B | 80% |
| Number of tubes in the bin | 7 | 6 | 5 | 4 | 3 | 2 | 1 | Overall | |
| Set A | Success rate | 100% | 95% | 100% | 100% | 100% | 100% | 100% | 99% |
| Number of picked tubes | 20 | 20 | 20 | 20 | 20 | 19 | 18 | 137 | |
| Set B | Success rate | 80% | 95% | 100% | 90% | 90% | 100% | 100% | 93% |
| Number of picked tubes | 20 | 20 | 20 | 20 | 20 | 19 | 16 | 135 | |
| Number of tubes in the bin | 7 | 6 | 5 | 4 | 3 | 2 | 1 | Overall | |
| Set A | Usage rate (upwards trajectories) | 0% | 9.5% | 10% | 10% | 5% | 0% | 0% | 5% |
| Usage rate (escape trajectories) | 0% | 4.8% | 0% | 10% | 0% | 0% | 0% | 2% | |
| Usage rate (total) | 0% | 14.3% | 10% | 20% | 5% | 0% | 0% | 7% | |
| Number of picking attempts | 20 | 21 | 20 | 20 | 20 | 19 | 18 | 138 | |
| Set B | Usage rate (upwards trajectories) | 25% | 10% | 5% | 27% | 5% | 0% | 0% | 11% |
| Usage rate (escape trajectories) | 4% | 0% | 0% | 0% | 27% | 11% | 0% | 6% | |
| Usage rate (total) | 29% | 10% | 5% | 27% | 32% | 11% | 0% | 17% | |
| Number of picking attempts | 24 | 21 | 20 | 22 | 22 | 19 | 16 | 144 | |
| Set A | Success rate (upwards trajectories) | 100% |
| Success rate (escape trajectories) | 100% | |
| Success rate (total) | 100% | |
| Number of upward trajectories | 7 | |
| Number of escape trajectories | 3 | |
| Number of uses of simulation | 10 | |
| Set B | Success rate (upwards trajectories) | 63% |
| Success rate (escape trajectories) | 78% | |
| Success rate (total) | 68% | |
| Number of upward trajectories | 16 | |
| Number of escape trajectories | 9 | |
| Number of uses of simulation | 25 |
| Number of tubes in tde bin | 7 | 6 | 5 | 4 | 3 | 2 | 1 | Overall |
| Set A | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Set B | 13% | 5% | 0% | 14% | 14% | 5% | 0% | 8% |
| Set A | Success rate | - |
| Number of uses of entanglement resolution | 0 | |
| Set B | Success rate | 27% |
| Number of uses of entanglement resolution | 11 |
| Set A | Set B | ||
|---|---|---|---|
| Total processing time, all cases | Average | 7.38 s | 8.72 s |
| Std. deviation | 13.28 s | 14.59 s | |
| Total processing time, cases without simulation | Average | 4.13 s | 2.68 s |
| Std. deviation | 1.07 s | 0.73 s | |
| Total processing time, cases with simulation | Average | 48.99 s | 37.47 s |
| Std. deviation | 23.52 s | 14.95 s | |
| Modeling time | Average | 3.15 s | 2.11 s |
| Std. deviation | 0.81 s | 0.58 s | |
| Planning time, all cases | Average | 4.06 s | 6.46 s |
| Std. deviation | 13.15 s | 14.51 s | |
| Planning time, cases without simulation | Average | 0.84 s | 0.44 s |
| Std. deviation | 0.41 s | 0.23 s | |
| Planning time, cases with simulation | Average | 45.27 s | 35.11 s |
| Std. deviation | 23.55 s | 14.84 s | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leão, G.; Costa, C.M.; Sousa, A.; Veiga, G. Detecting and Solving Tube Entanglement in Bin Picking Operations. Appl. Sci. 2020, 10, 2264. https://doi.org/10.3390/app10072264
Leão G, Costa CM, Sousa A, Veiga G. Detecting and Solving Tube Entanglement in Bin Picking Operations. Applied Sciences. 2020; 10(7):2264. https://doi.org/10.3390/app10072264
Chicago/Turabian StyleLeão, Gonçalo, Carlos M. Costa, Armando Sousa, and Germano Veiga. 2020. "Detecting and Solving Tube Entanglement in Bin Picking Operations" Applied Sciences 10, no. 7: 2264. https://doi.org/10.3390/app10072264
APA StyleLeão, G., Costa, C. M., Sousa, A., & Veiga, G. (2020). Detecting and Solving Tube Entanglement in Bin Picking Operations. Applied Sciences, 10(7), 2264. https://doi.org/10.3390/app10072264