Enhancement of Computational Efficiency in Seeking Liveness-Enforcing Supervisors for Advanced Flexible Manufacturing Systems with Deadlock States



Abstract
:Featured Application
Abstract
1. Introduction
2. Preliminaries
2.1. Petri Nets (PNs)
2.2. Identify All FBMs
3. Improved Policy with Enhancement of Computational Efficiency
3.1. Finding Controllers from Place Invariant (PI) Concept
3.2. MFFP
3.3. Crucial Vector Covering Approach
- 1)
- ∈ ;
- 2)
- and .
- 1)
- ;
- 2)
- and .
3.4. Pre Idle Places (PIP)
3.5. The Proposed Improved MFFP-2 (IMFFP-2)
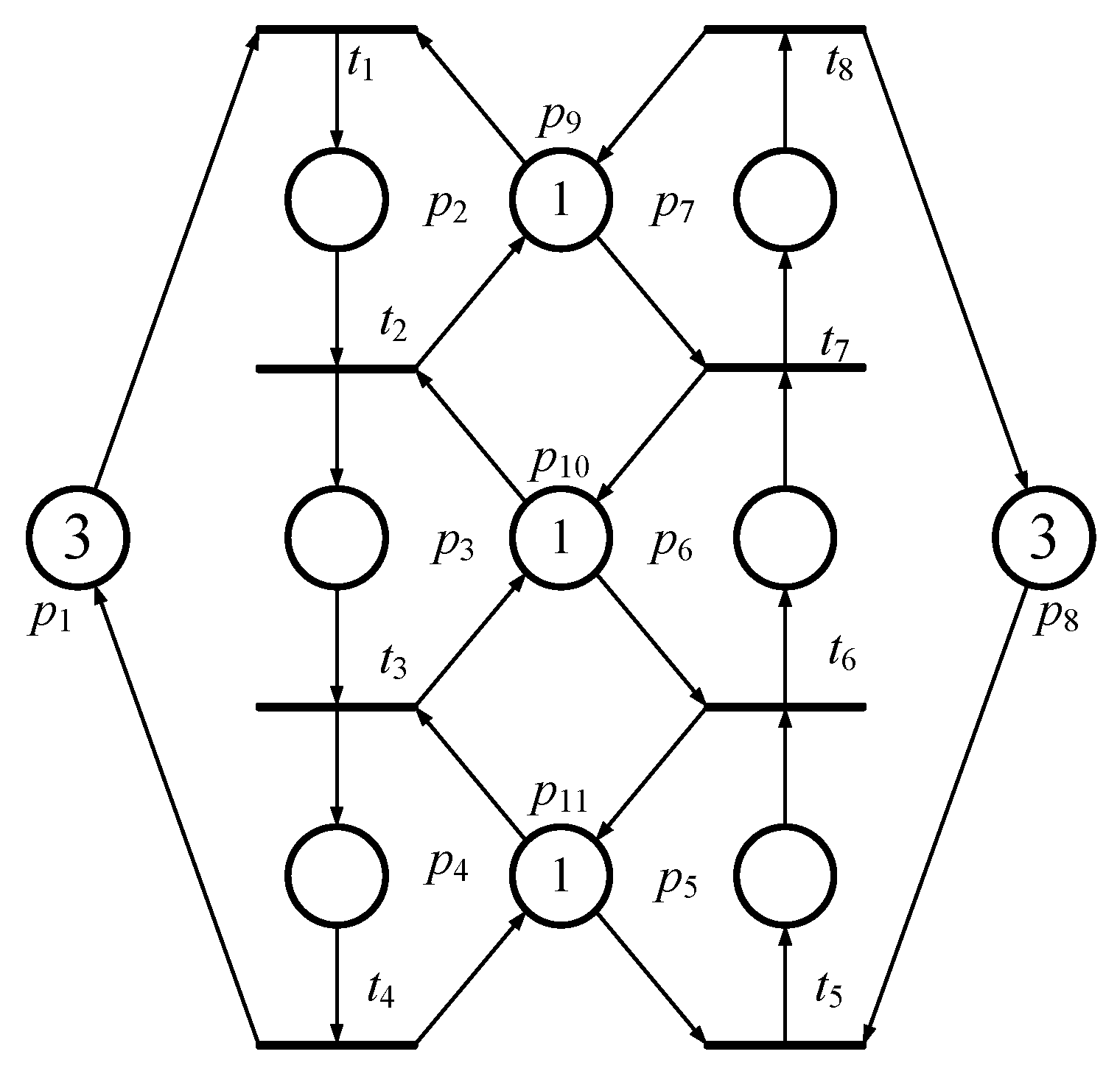
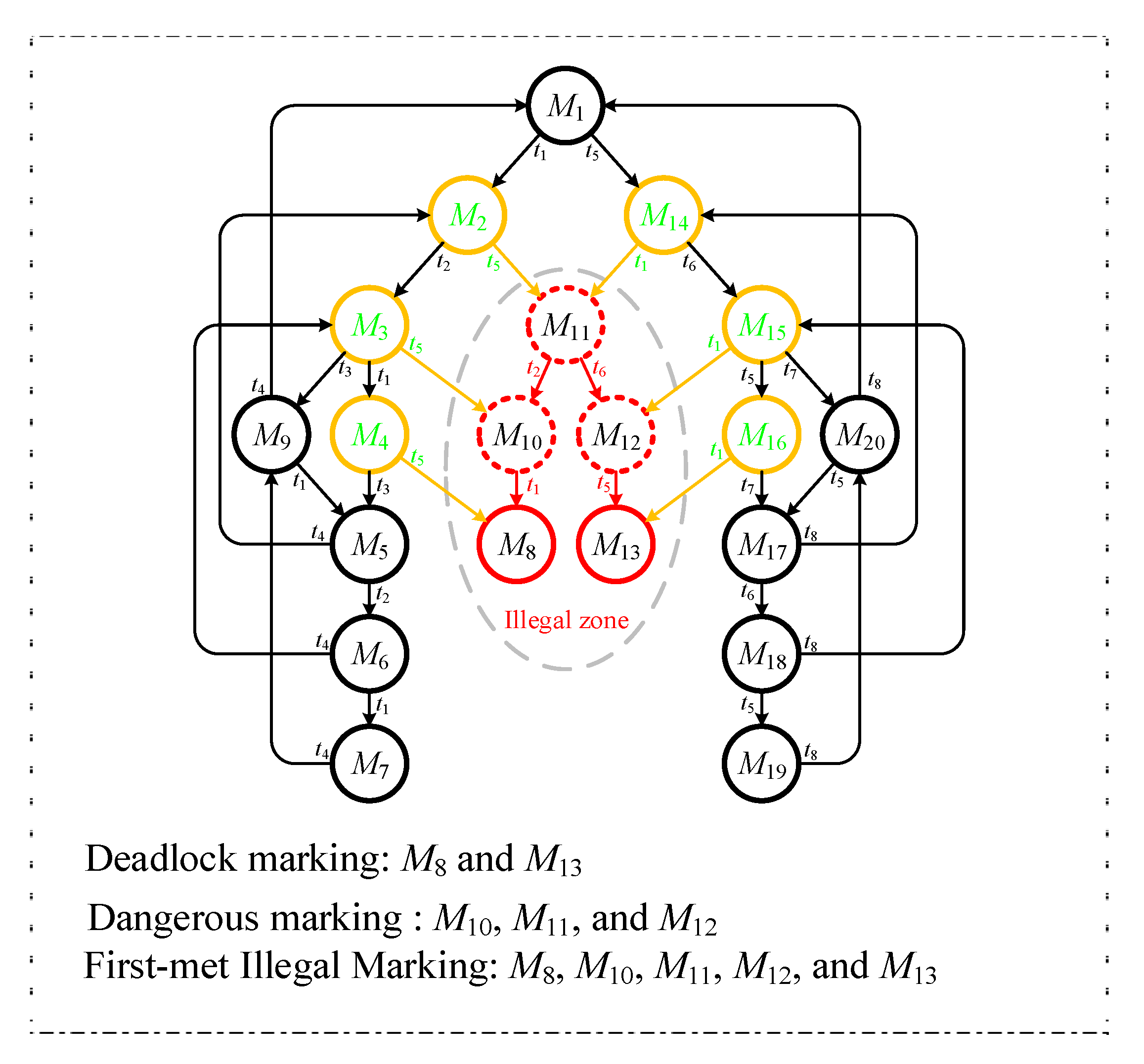
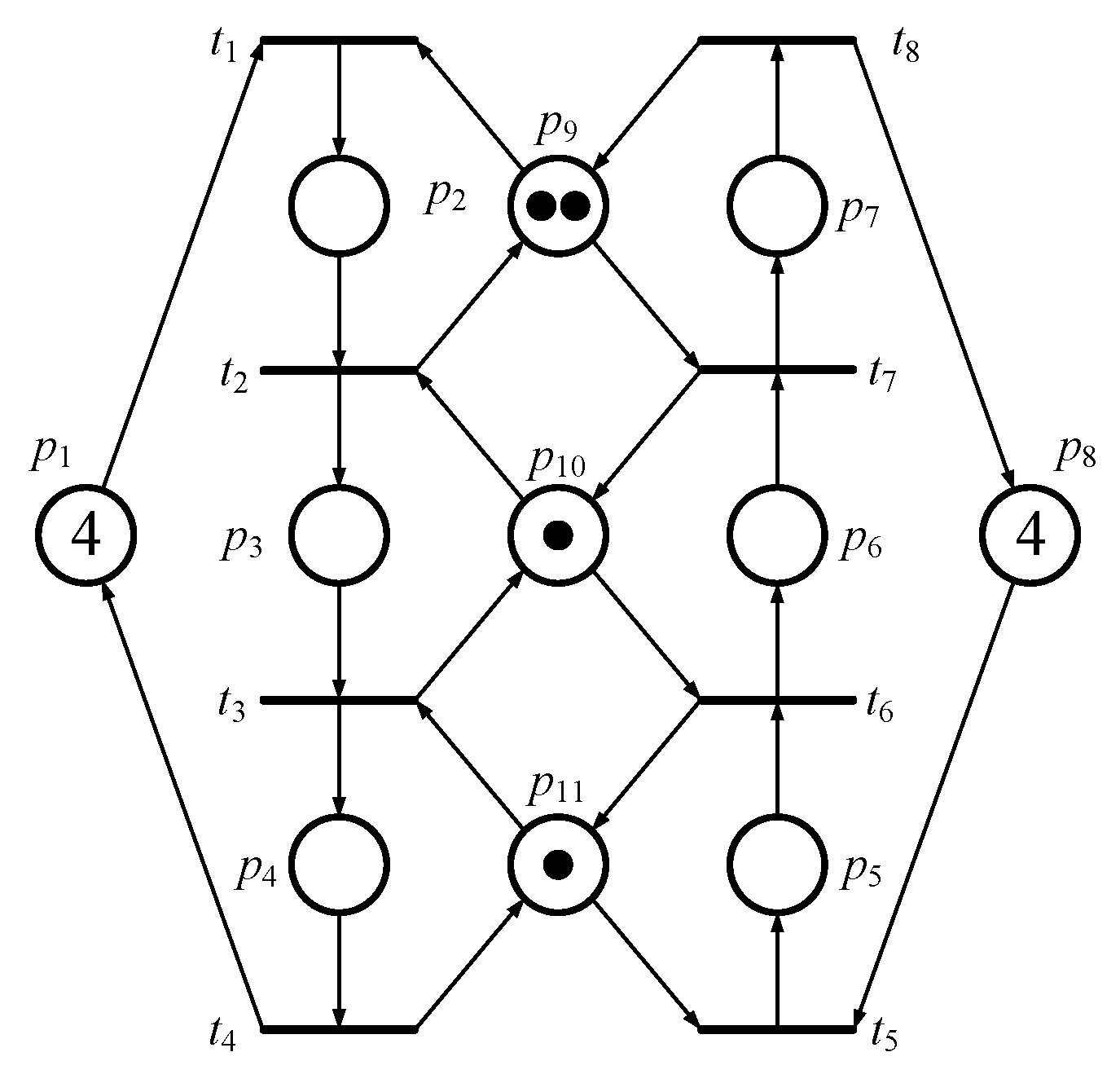
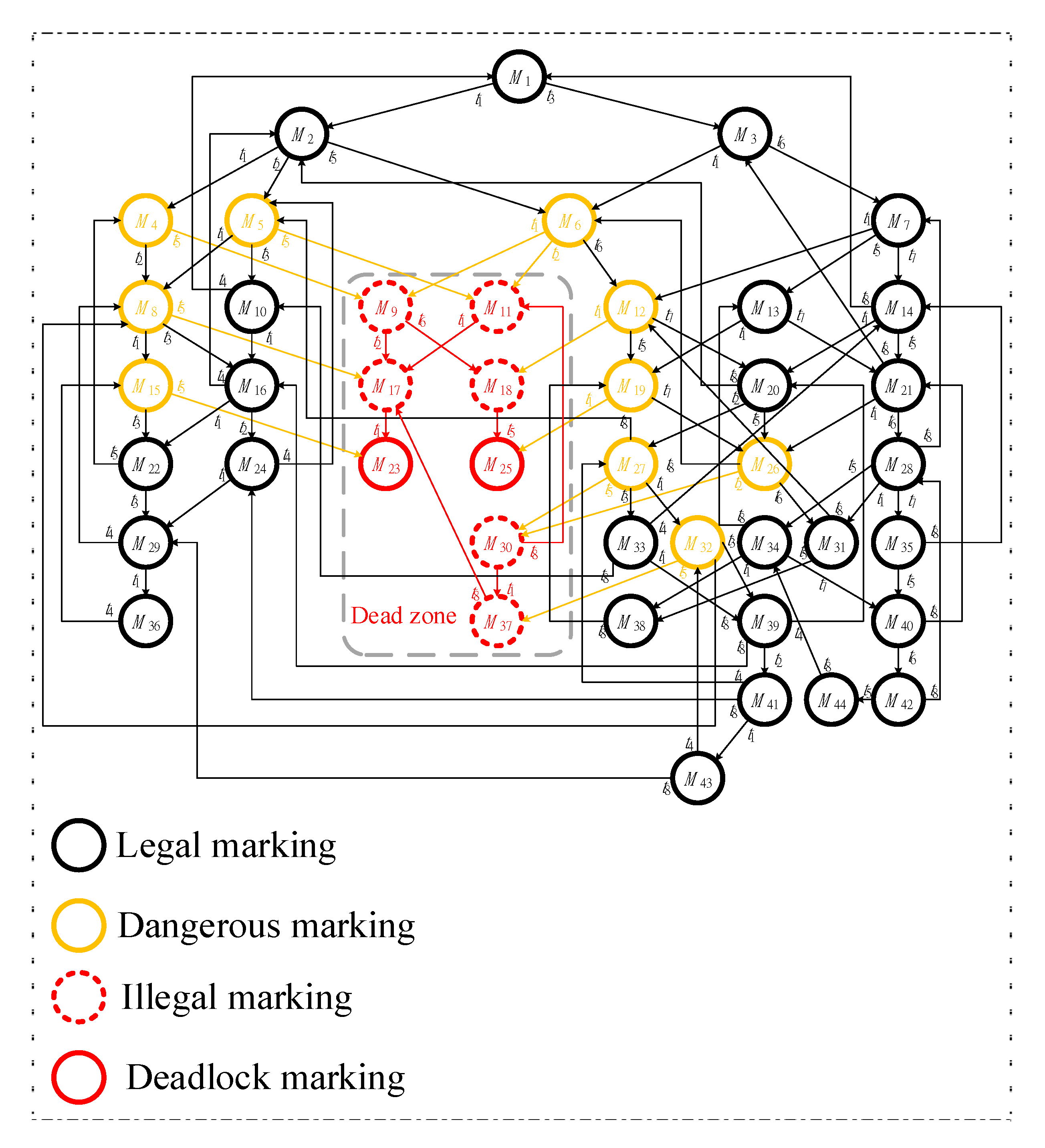
4. Examples
5. Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Y.; Li, Z.; Zhou, M. Behaviorally Optimal and Structurally Simple Liveness-Enforcing Supervisors of Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 615–629. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Z.; Khalgui, M.; Mosbahi, O. Design of a Maximally Permissive Liveness- Enforcing Petri Net Supervisor for Flexible Manufacturing Systems. IEEE Trans. Autom. Sci. Eng. 2011, 8, 374–393. [Google Scholar] [CrossRef]
- Yamalidou, K.; Moody, J.; Lemmon, M.; Antsaklis, P. Feedback control of petri nets based on place invariants. Automatica 1996, 32, 15–28. [Google Scholar] [CrossRef]
- Coffman, E.G.; Elphick, M.; Shoshani, A. System Deadlocks. ACM Comput. Surv. 1971, 3, 67–78. [Google Scholar] [CrossRef]
- Uzam, M.; Zhou, M. An Iterative Synthesis Approach to Petri Net-Based Deadlock Prevention Policy for Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2007, 37, 362–371. [Google Scholar] [CrossRef]
- Ezpeleta, J.; Colom, J.; Martinez, J. A Petri net based deadlock prevention policy for flexible manufacturing systems. IEEE Trans. Robot. Autom. 1995, 11, 173–184. [Google Scholar] [CrossRef] [Green Version]
- Kumaran, T.K.; Chang, W.; Cho, H.; Wysk, R.A. A structured approach to deadlock detection, avoidance and resolution in flexible manufacturing systems. Int. J. Prod. Res. 1994, 32, 2361–2379. [Google Scholar] [CrossRef]
- Uzam, M.; Zhou, M.C. An improved iterative synthesis method for liveness enforcing supervisors of flexible manufacturing systems. Int. J. Prod. Res. 2006, 44, 1987–2030. [Google Scholar] [CrossRef]
- Pan, Y.L.; Huang, Y.S.; Jeng, M.; Chung, S.L. Enhancement of an efficient control policy for FMSs using the theory of regions and selective siphon method. Int. J. Adv. Manuf. Technol. 2012, 66, 1805–1815. [Google Scholar] [CrossRef]
- Luo, J.; Wu, W.; Su, H.; Chu, J. Supervisor Synthesis for Enforcing a Class of Generalized Mutual Exclusion Constraints on Petri Nets. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2009, 39, 1237–1246. [Google Scholar]
- Chen, Y.; Li, Z. Design of a maximally permissive liveness-enforcing supervisor with a compressed supervisory structure for flexible manufacturing systems. Automatica 2011, 47, 1028–1034. [Google Scholar] [CrossRef]
- Zhou, M.; Dicesare, F. Parallel and sequential mutual exclusions for petri net modeling of manufacturing systems with shared resources. IEEE Trans. Robot. Autom. 1991, 7, 515–527. [Google Scholar] [CrossRef]
- Huang, Y.; Jeng, M.; Xie, X.; Chung, S. Deadlock prevention policy based on Petri nets and siphons. Int. J. Prod. Res. 2001, 39, 283–305. [Google Scholar] [CrossRef]
- Huang, Y.S.; Jeng, M.; Xie, X.; Chung, D.H. Siphon-Based Deadlock Prevention Policy for Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2006, 36, 1248–1256. [Google Scholar] [CrossRef]
- Pan, Y.L.; Jeng, M.D.; Chung, S.L.; Guo, Y.X. Computationally Improved Optimal Deadlock Prevention Policy for Linear Programming Problems of Flexible Manufacturing Systems. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013. [Google Scholar]
- Zhou, M.; Mcdermott, K.; Patel, P. Petri net synthesis and analysis of a flexible manufacturing system cell. IEEE Trans. Syst. Man Cybern. 1993, 23, 523–531. [Google Scholar] [CrossRef]
- Li, Z.; Wang, A.; Wei, N. Liveness-Enforcing Supervisors for Flexible Manufacturing Systems with Multiple Resource Acquisitions. In Proceedings of the 2006 IEEE International Conference on Networking, Sensing and Control, Ft. Lauderdale, FL, USA, 23–25 April 2006. [Google Scholar]
- Li, Z.; Zhou, M. Elementary Siphons of Petri Nets and Their Application to Deadlock Prevention in Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2004, 34, 38–51. [Google Scholar] [CrossRef]
- Iordache, M.; Moody, J.; Antsaklis, P. Synthesis of deadlock prevention supervisors using Petri nets. IEEE Trans. Robot. Autom. 2002, 18, 59–68. [Google Scholar] [CrossRef]
- Moody, J.O.; Antsaklis, P.J. Supervisory Control of Discrete Event Systems Using Petri Nets; Kluwer Academic Publishers: Boston, MA, USA, 1998. [Google Scholar]
- Jeng, M.D. A Petri net synthesis theory for modeling flexible manufacturing systems. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1997, 27, 169–183. [Google Scholar] [CrossRef]
- Huang, Y.S. Design of Deadlock Prevention Supervisors Using Elementary Siphons. In Proceedings of the Multi Conference on “Computational Engineering in Systems Applications”, Beijing, China, 4–6 October 2006. [Google Scholar]
- Huang, Y.S. Deadlock Prevention for Sequence Resource Allocation Systems. J. Inf. Sci. Eng. 2007, 23, 215–231. [Google Scholar]
- Li, Z.W.; Hu, H.S.; Wang, A.R. Design of Liveness-Enforcing Supervisors for Flexible Manufacturing Systems Using Petri Nets. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 517–526. [Google Scholar] [CrossRef]
- Iordache, M.; Moody, J.; Antsaklis, P. A method for the synthesis of liveness enforcing supervisors in Petri nets. In Proceedings of the 2001 American Control Conference. (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001. [Google Scholar]
- Park, J.; Reveliotis, S. Algebraic synthesis of efficient deadlock avoidance policies for sequential resource allocation systems. IEEE Trans. Robot. Autom. 2000, 16, 190–195. [Google Scholar] [CrossRef]
- Li, Z.W.; Liu, G.Y.; Hanisch, M.H.; Zhou, M.C. Deadlock prevention based on structure reuse of petri net supervisors for flexible manufacturing systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 178–191. [Google Scholar] [CrossRef]
- Uzam, M. An Optimal Deadlock Prevention Policy for Flexible Manufacturing Systems Using Petri Net Models with Resources and the Theory of Regions. Int. J. Adv. Manuf. Technol. 2002, 19, 192–208. [Google Scholar] [CrossRef]
- Uzam, M.; Zhou, M. Iterative synthesis of Petri net based deadlock prevention policy for flexible manufacturing systems. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, The Netherlands, 10–13 October 2004. [Google Scholar]
- Chen, Y.; Li, Z.; Barkaoui, K. Optimal Petri net supervisor with lowest implemental cost for flexible manufacturing systems. In Proceedings of the Etfa2011, Toulouse, France, 5–9 September 2011. [Google Scholar]
- Uzam, M. The use of the Petri net reduction approach for an optimal deadlock prevention policy for flexible manufacturing systems. Int. J. Adv. Manuf. Technol. 2004, 23, 204–219. [Google Scholar] [CrossRef]
- Uzam, M. Synthesis of feedback control elements for discrete event systems using Petri net models and theory of regions. Int. J. Adv. Manuf. Technol. 2004, 24, 48–69. [Google Scholar] [CrossRef]
- Ghaffari, A.; Rezg, N.; Xie, X. Design of a live and maximally permissive petri net controller using the theory of regions. IEEE Trans. Robot. Autom. 2003, 19, 137–142. [Google Scholar] [CrossRef]
- Huang, Y.S.; Pan, Y.L. Enhancement of an Efficient Liveness-Enforcing Supervisor for Flexible Manufacture Systems. Int. J. Adv. Manuf. Technol. 2010, 48, 725–737. [Google Scholar] [CrossRef]
- Huang, Y.S.; Pan, Y.L.; Zhou, M. Computationally Improved Optimal Deadlock Control Policy for Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 404–415. [Google Scholar] [CrossRef]
- Pan, Y.L. An Efficient Deadlock Prevention Policy for Flexible Manufacturing Systems Using the Theory of Regions and Selective Siphon Method. Adv. Sci. Lett. 2012, 15, 342–345. [Google Scholar] [CrossRef]
- Huang, Y.S.; Pan, Y.L. An improved maximally permissive deadlock prevention policy based on the theory of regions and reduction approach. IET Control Theory Appl. 2011, 5, 1069–1078. [Google Scholar] [CrossRef]
- Li, Z.W.; Zhou, M.C.; Wu, N.Q. A Survey and Comparison of Petri Net-Based Deadlock Prevention Policies for Flexible Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2008, 38, 173–188. [Google Scholar]
- Piroddi, L.; Cordone, R.; Fumagalli, I. Selective Siphon Control for Deadlock Prevention in Petri Nets. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2008, 38, 1337–1348. [Google Scholar] [CrossRef]
- Pan, Y.L.; Yang, C.F.; Jeng, M.D. Enhancement of Selective Siphon Control Method for Deadlock Prevention in FMSs. Math. Probl. Eng. 2015, 2015, 1–6. [Google Scholar]
- Moody, J.; Yamalidou, K.; Lemmon, M.; Antsaklis, P. Feedback control of Petri nets based on place invariants. In Proceedings of the 1994 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994. [Google Scholar]
- Pan, Y.L.; Tseng, C.Y.; Row, T.C. Design of Improved Optimal or Suboptimal Deadlock Prevention for FMSs Based on Place Invariant and Reachability Graph Analysis Methods. J. Algorithms Comput. Technol. 2017, 11, 261–270. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.L.; Tseng, C.Y.; Huang, Y.S. Design of one computationally improved deadlock prevention based on MFFP technology in flexible manufacturing system. In Proceedings of the 2015 International Automatic Control Conference (CACS), Yilan, Taiwan, 18–20 Novembe 2015. [Google Scholar]
- Huang, Y.S.; Pan, Y.L.; Su, P.J. Transition-based Deadlock Detection and Recovery Policy for FMSs Using Graph Technique. ACM Trans. Embed. Comput. Syst. 2013, 12. [Google Scholar] [CrossRef]
- Xiuyan, Z.; Murat, U. Transition-based Deadlock Control Policy Using Reachability Graph for Flexible Manufacturing Systems. Adv. Mech. Eng. 2016, 8, 1–9. [Google Scholar]
- Chen, Y.F.; Li, Z.W.; Al-Ahmari, A.; Wu, N.; Qu, T. Deadlock recovery for flexible manufacturing systems modeled with Petri nets. Inf. Sci. 2017, 381, 290–303. [Google Scholar] [CrossRef]
- Row, C.; Pan, Y.L. Maximally Permissive Deadlock Prevention Policies for Flexible Manufacturing Systems Using Control Transition. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Row, T.C.; Hsu, W.M.; Pan, Y.L.; Wang, C.C. One Novel and Optimal Deadlock Recovery Policy for Flexible Manufacturing Systems Using Iterative Control Transitions Strategy. Math. Probl. Eng. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Pan, Y.L. One Computational Innovation Transition-Based Recovery Policy for Flexible Manufacturing Systems Using Petri nets. Appl. Sci. 2020, 10, 2332. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.F.; Li, Z.W.; Barkaoui, K.; Wu, N.Q.; Zhou, M.C. Compact supervisory control of discrete event systems by Petri nets with data inhibitor arcs. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 364–379. [Google Scholar] [CrossRef]
- Uzam, M.; Li, Z.W.; Gelen, G.; Zakariyya, R.S. A divide-and-conquer-method for the synthesis of liveness enforcing supervisors for flexible manufacturing systems. J. Intell. Manuf. 2016, 27, 1111–1129. [Google Scholar] [CrossRef]
- Murata, T. Petri nets: Properties, analysis and applications. Proc. IEEE 1989, 77, 541–580. [Google Scholar] [CrossRef]
- PN-Tools, A. Petri Net Analysis Tool, Ver. 1.0; Pedagogical University Rzesów: Warsaw, Poland, 1987. [Google Scholar]
- INA (Integrated Net Analyzer). A Software Tool for Analysis of Petri Nets. Version 2.2, 31.07. 2003. Available online: http://www.informatik.hu-berlin.de/~starke/ina.html (accessed on 31 July 2003).
- Sipser, M. Introduction to the Theory of Computation, 2nd ed.; Cengage Learning: Boston, MA, USA, 2013. [Google Scholar]
- “Time Complexity”. Wikipedia, 28 December 2017. Available online: https://en.wikipedia.org/wiki/Time_complexity (accessed on 11 January 2018).
- Pan, Y.L.; Huang, Y.S.; Weng, Y.S.; Wu, W.; Jeng, M.D. Computationally Improved Optimal Control Methodology for Linear Programming Problems of Flexible Manufacturing Systems. J. Appl. Math. 2013, 2013, 1–11. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Marking No. | Classification | Marking Information |
|---|---|---|
| Initial Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Deadlock Marking | ||
| Live Marking | ||
| Quasi-deadlock Marking | ||
| Quasi-deadlock Marking | ||
| Quasi-deadlock Marking | ||
| Deadlock Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking | ||
| Live Marking |
| Marking No. | Classification | Marking Information |
|---|---|---|
| / | ||
| / | ||
| / | ||
| / | ||
| / | ||
| / | ||
| / | ||
| / |
| Marking No. | Classification | Marking Information |
|---|---|---|
| Marking No. | Classification | Marking Information | Marking No. | Classification | Marking Information |
|---|---|---|---|---|---|
| / | |||||
| / | |||||
| / | |||||
| / | / | ||||
| / | |||||
| / | |||||
| / | |||||
| Marking No. | Information of Marking |
|---|---|
| Additional | |||
|---|---|---|---|
| 14 | |||
| 9 |
| Ex. | IMFFP-2 | MFFPIMFFP-2 | O(n?)MFFP | O(n?)IMFFP-2 | O(n?)MFFP / O(n?)IMFFP-2 | Computational Efficiency | |
|---|---|---|---|---|---|---|---|
| 1 | 6 | 4 | 2 | / | 100 times | ||
| 2 | 11 | 9 | 2 | / | 100 times | ||
| 3 | 16 | 13 | 3 | / | 1000 times |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Y.-L.; Tai, C.-W.; Tseng, C.-Y.; Huang, J.-C. Enhancement of Computational Efficiency in Seeking Liveness-Enforcing Supervisors for Advanced Flexible Manufacturing Systems with Deadlock States. Appl. Sci. 2020, 10, 2620. https://doi.org/10.3390/app10072620
Pan Y-L, Tai C-W, Tseng C-Y, Huang J-C. Enhancement of Computational Efficiency in Seeking Liveness-Enforcing Supervisors for Advanced Flexible Manufacturing Systems with Deadlock States. Applied Sciences. 2020; 10(7):2620. https://doi.org/10.3390/app10072620
Chicago/Turabian StylePan, Yen-Liang, Chun-Wang Tai, Ching-Yun Tseng, and Jong-Ching Huang. 2020. "Enhancement of Computational Efficiency in Seeking Liveness-Enforcing Supervisors for Advanced Flexible Manufacturing Systems with Deadlock States" Applied Sciences 10, no. 7: 2620. https://doi.org/10.3390/app10072620
APA StylePan, Y. -L., Tai, C. -W., Tseng, C. -Y., & Huang, J. -C. (2020). Enhancement of Computational Efficiency in Seeking Liveness-Enforcing Supervisors for Advanced Flexible Manufacturing Systems with Deadlock States. Applied Sciences, 10(7), 2620. https://doi.org/10.3390/app10072620