Evaluating the Impact of Drone Signaling in Crosswalk Scenario



Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
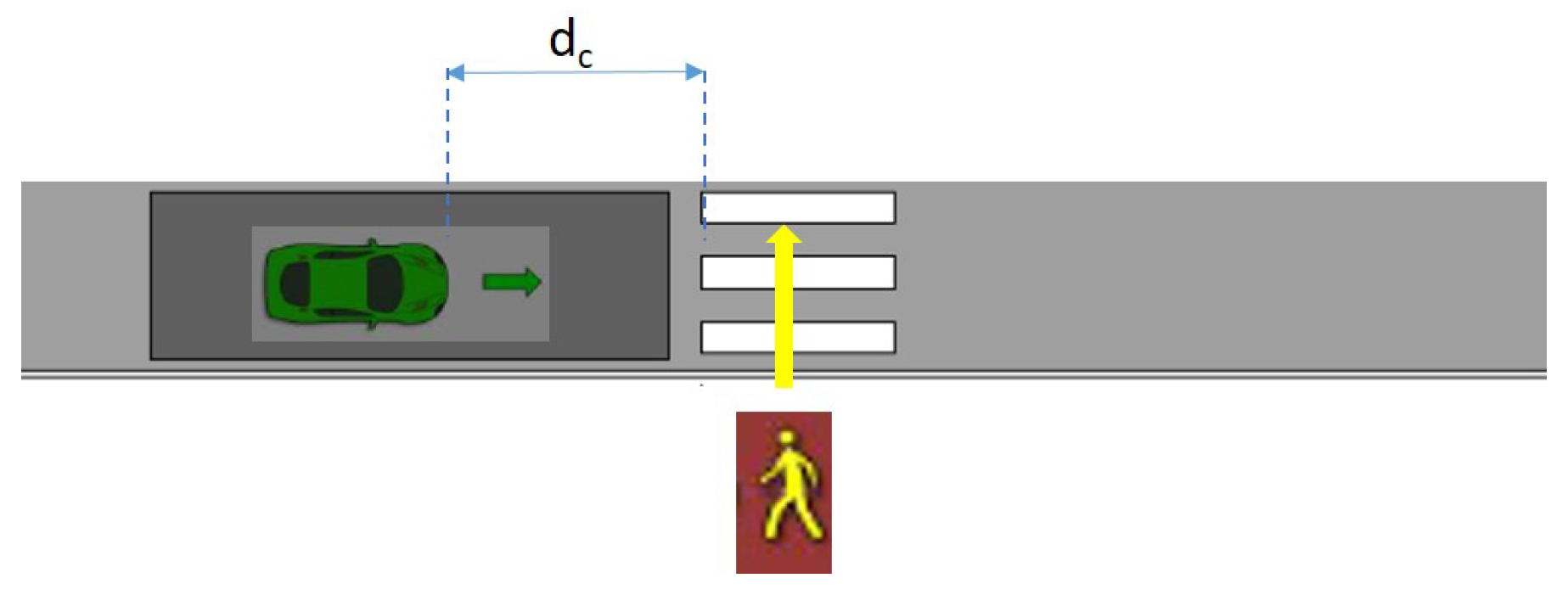
3.1. Problem Statement
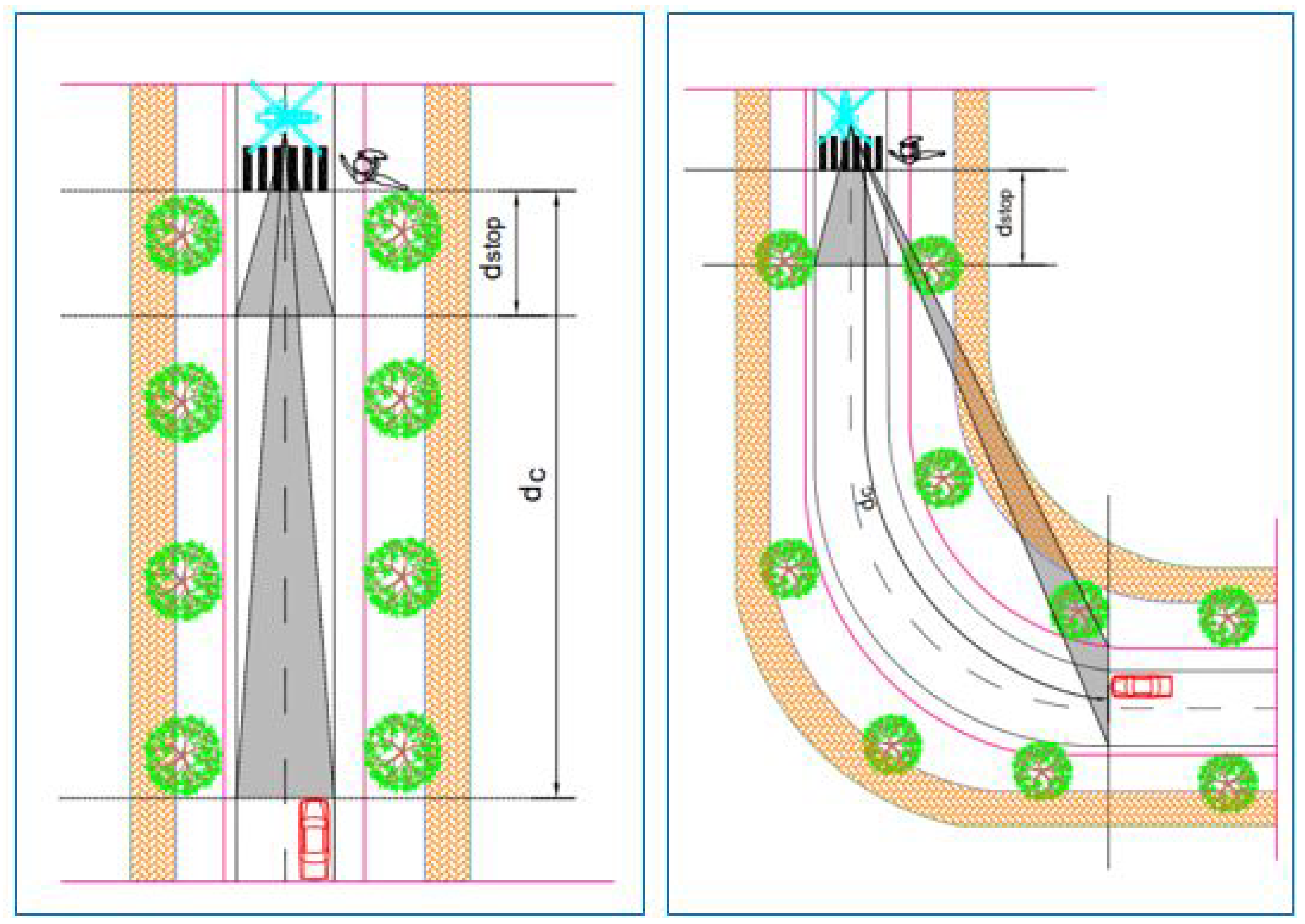
- visibility limits when driving by night or by curved road,
- lack of attention from the driver,
- lack of attention from the pedestrian, and
- infrastructure characteristics.
3.2. Metrics of Interest
3.2.1. Speed Profile
3.2.2. Acceleration Profile
3.2.3. Perception-Reaction Distance
3.2.4. Braking Distance
3.2.5. Fuel Consumption
3.3. Assumptions
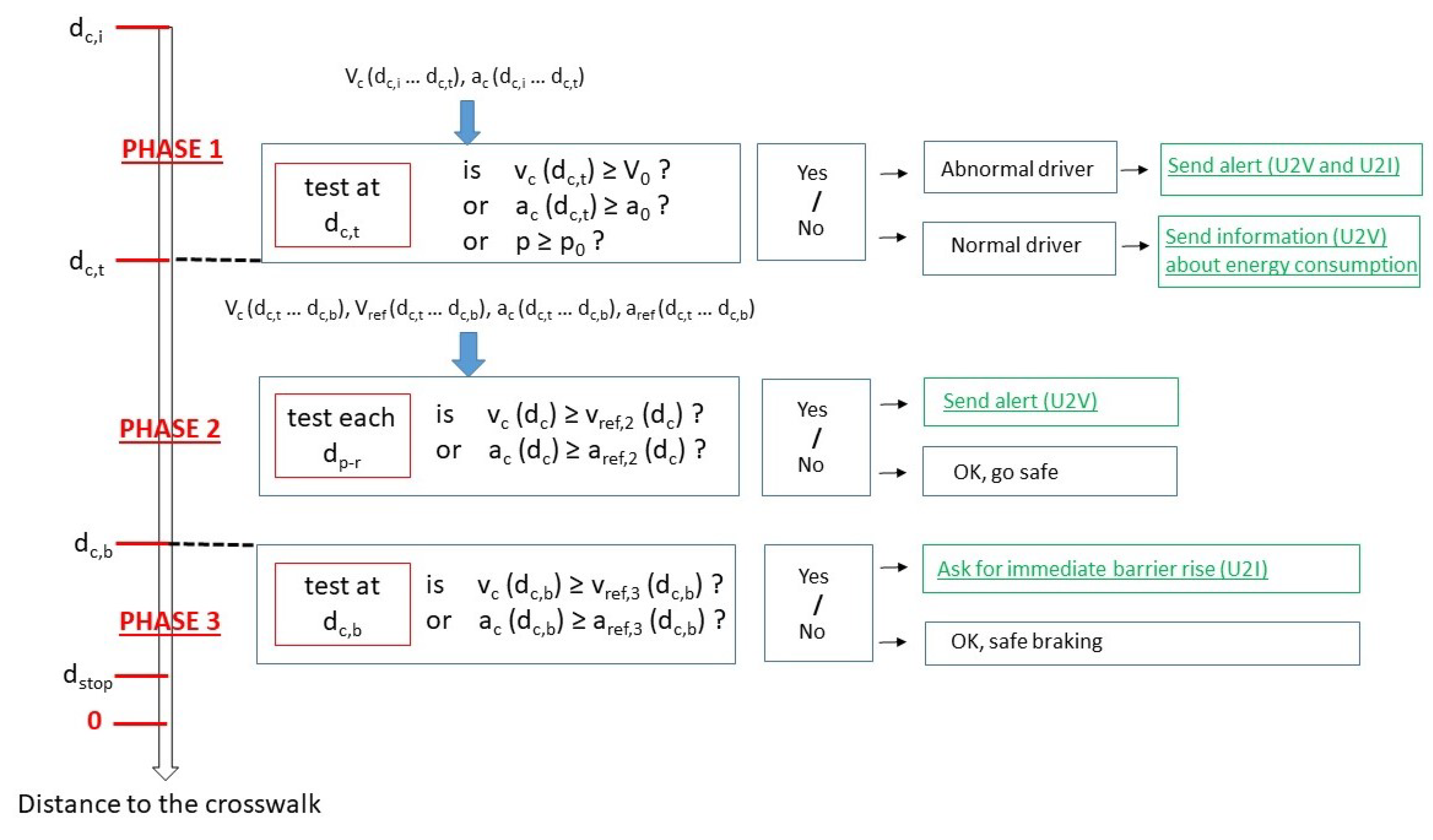
3.4. Algorithm
3.4.1. Phase 1: Driver Behavior Checking
3.4.2. Phase 2: Progressive Speed Adjustment
3.4.3. Phase 3: Braking
3.5. Simulation Setup
3.5.1. Simulation Parameters
3.5.2. Driver Profiles
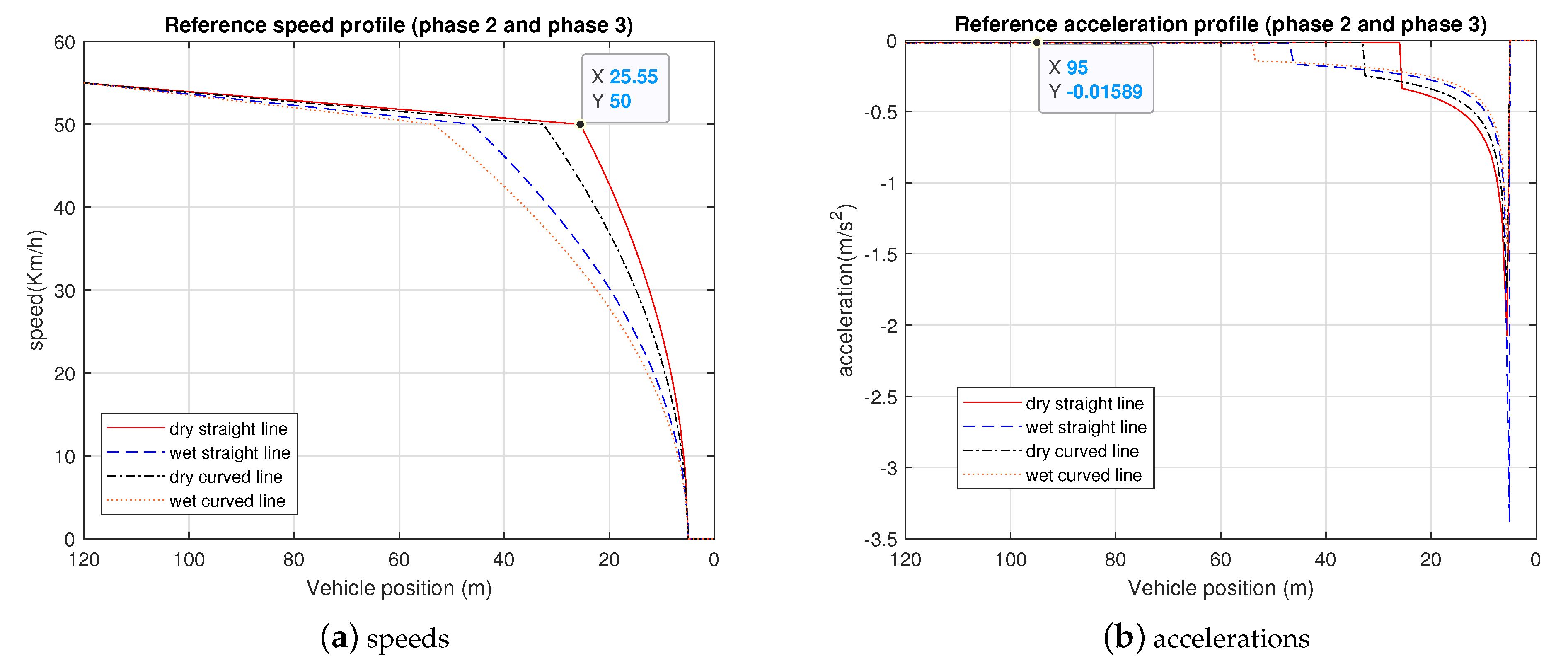
3.5.3. Reference Speed and Acceleration Profiles
4. Results
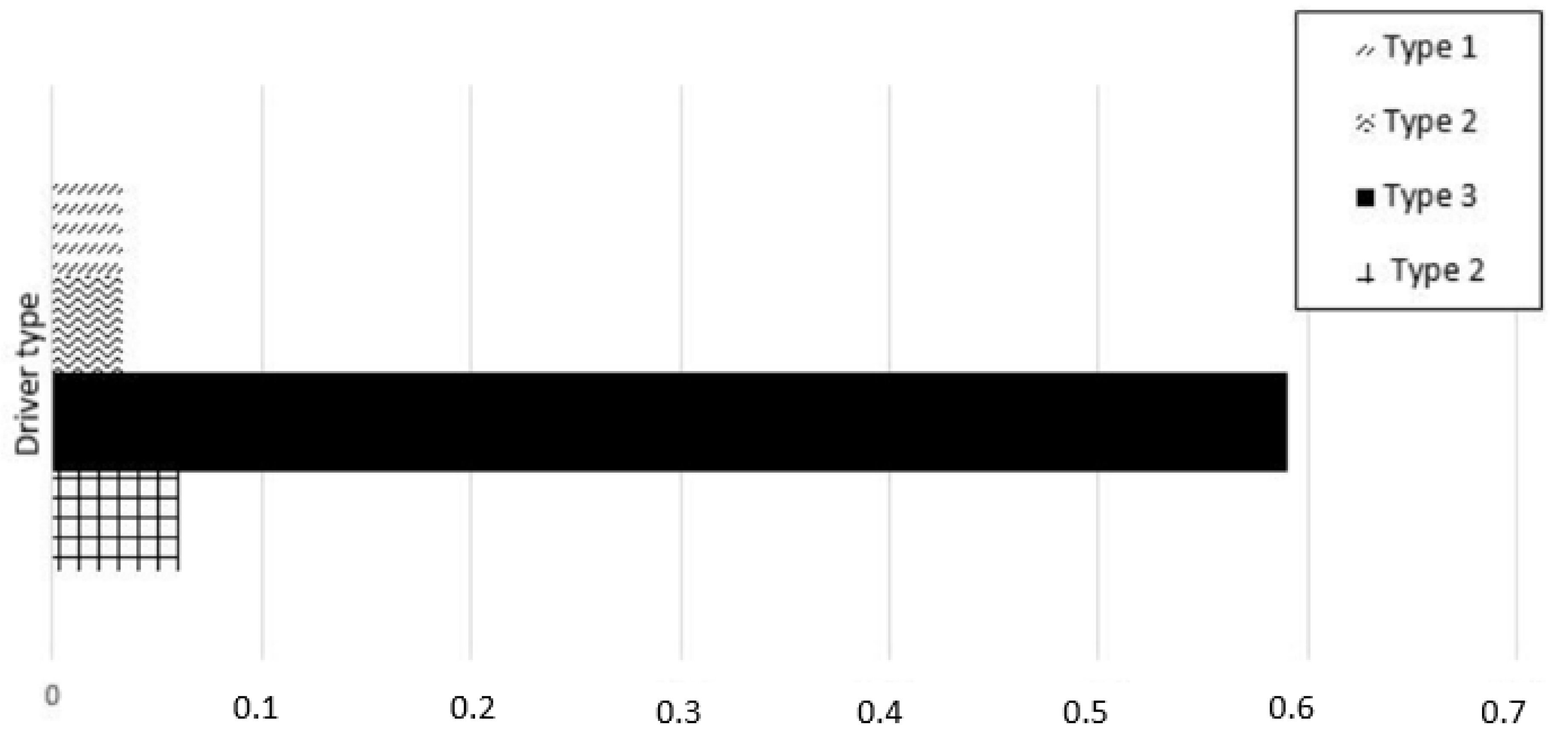
4.1. Drivers Behavior Identification
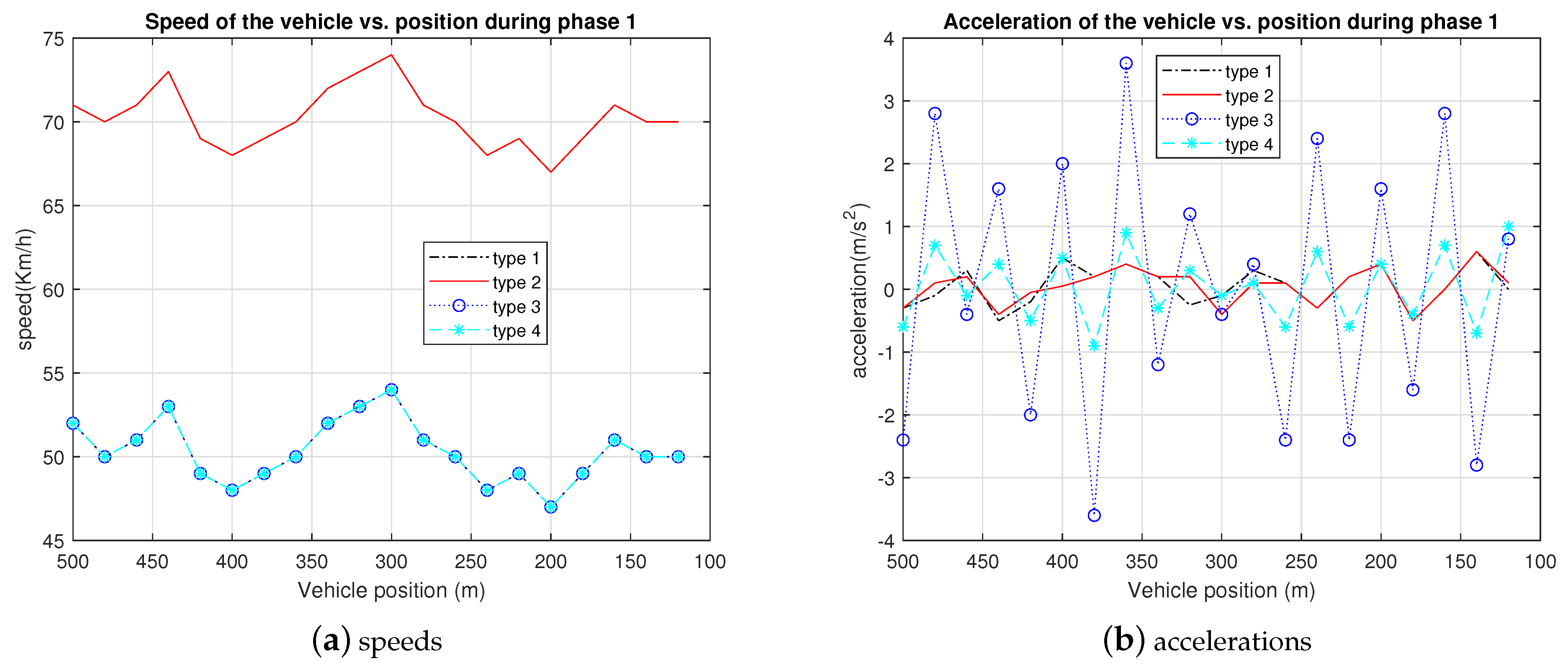
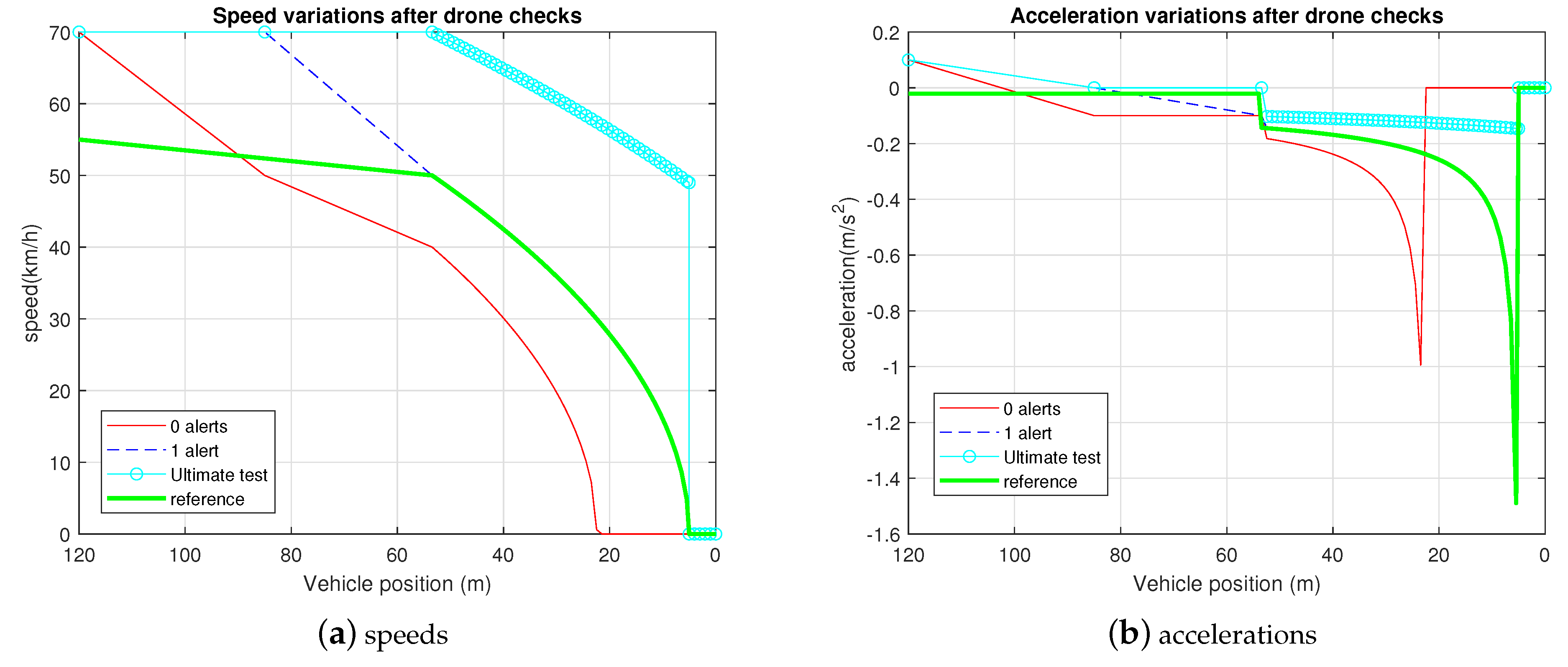
4.2. Speed and Acceleration Variations
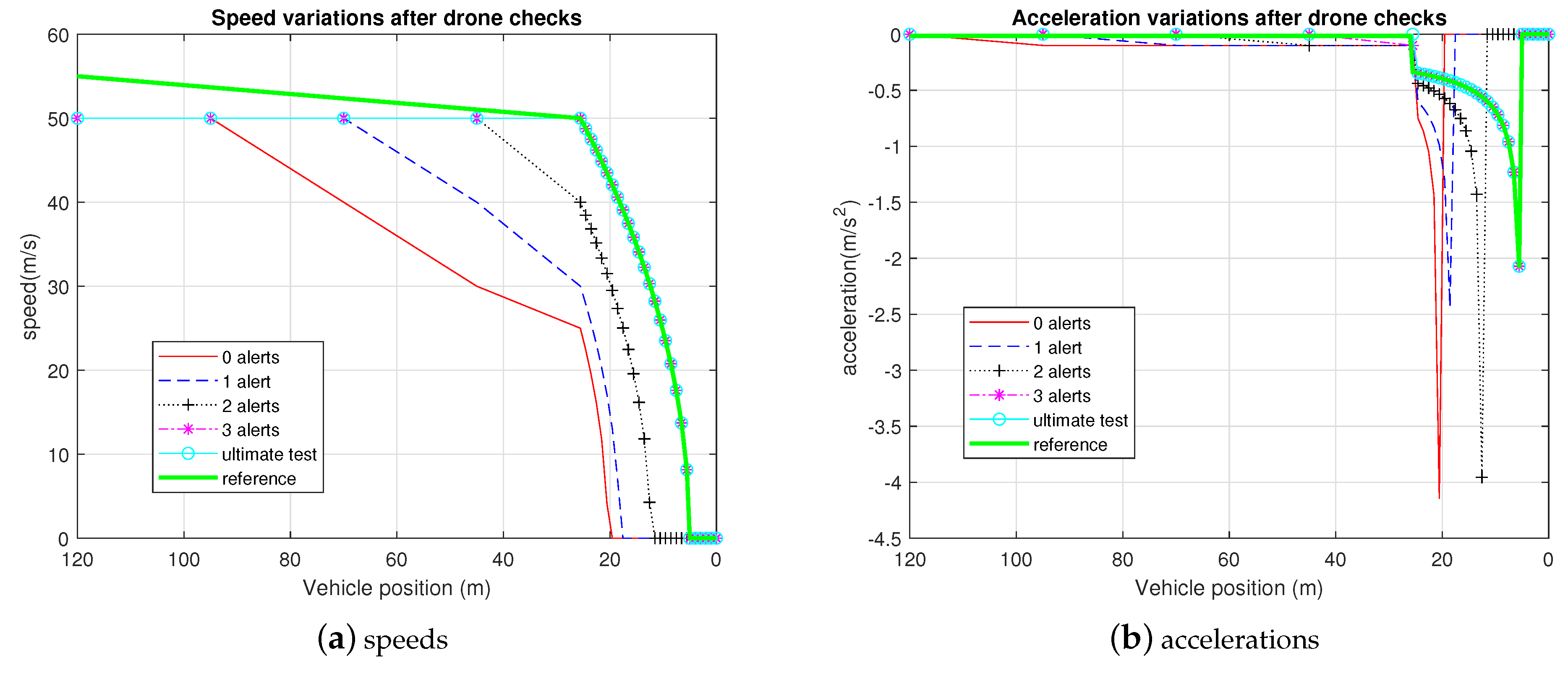
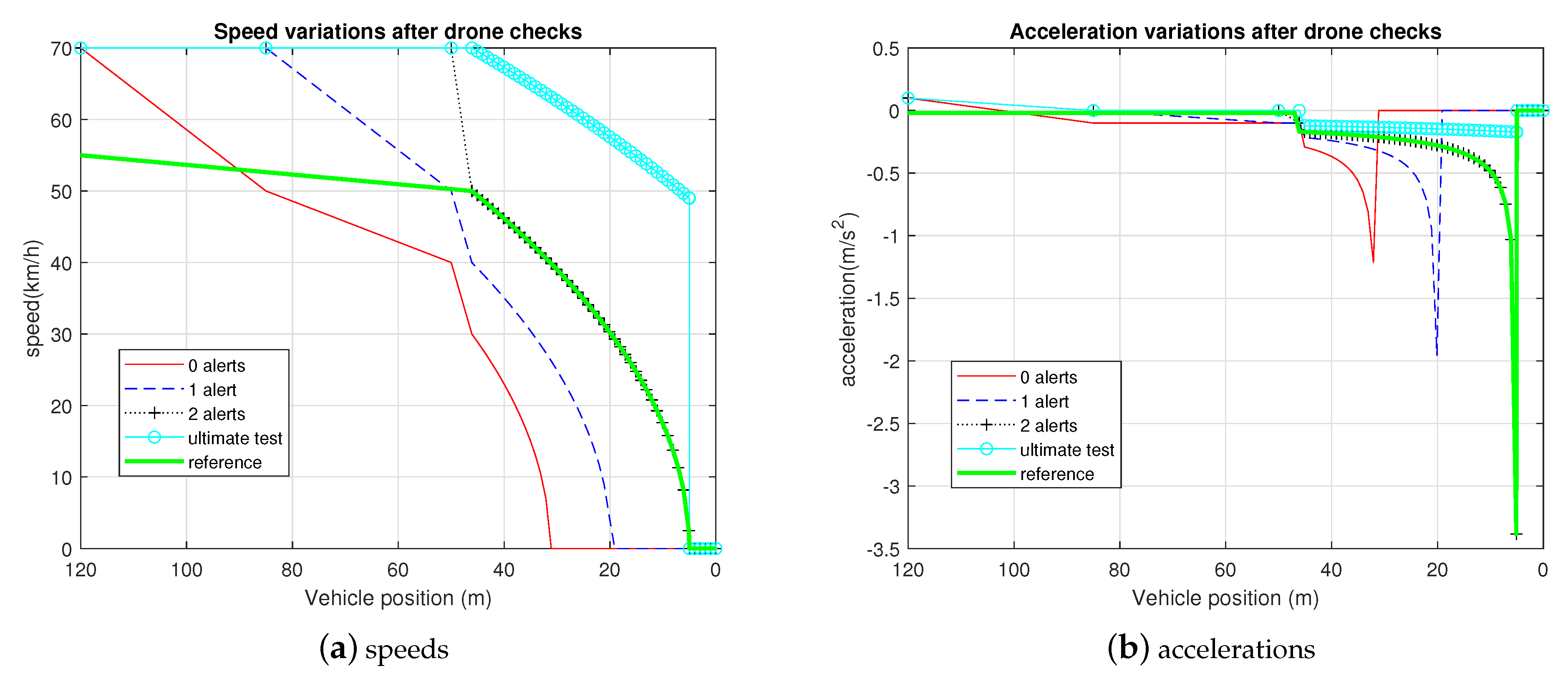
4.2.1. Case of Dry Straight Line
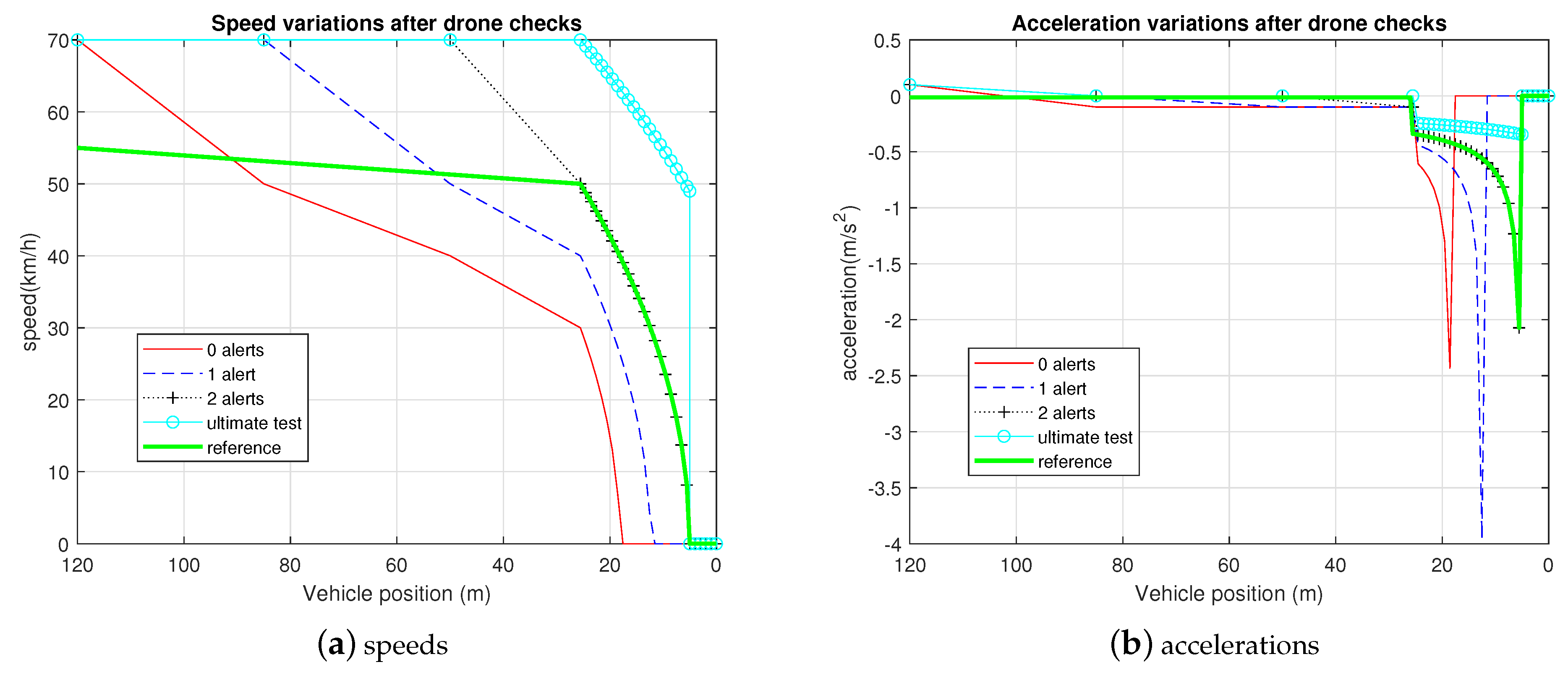
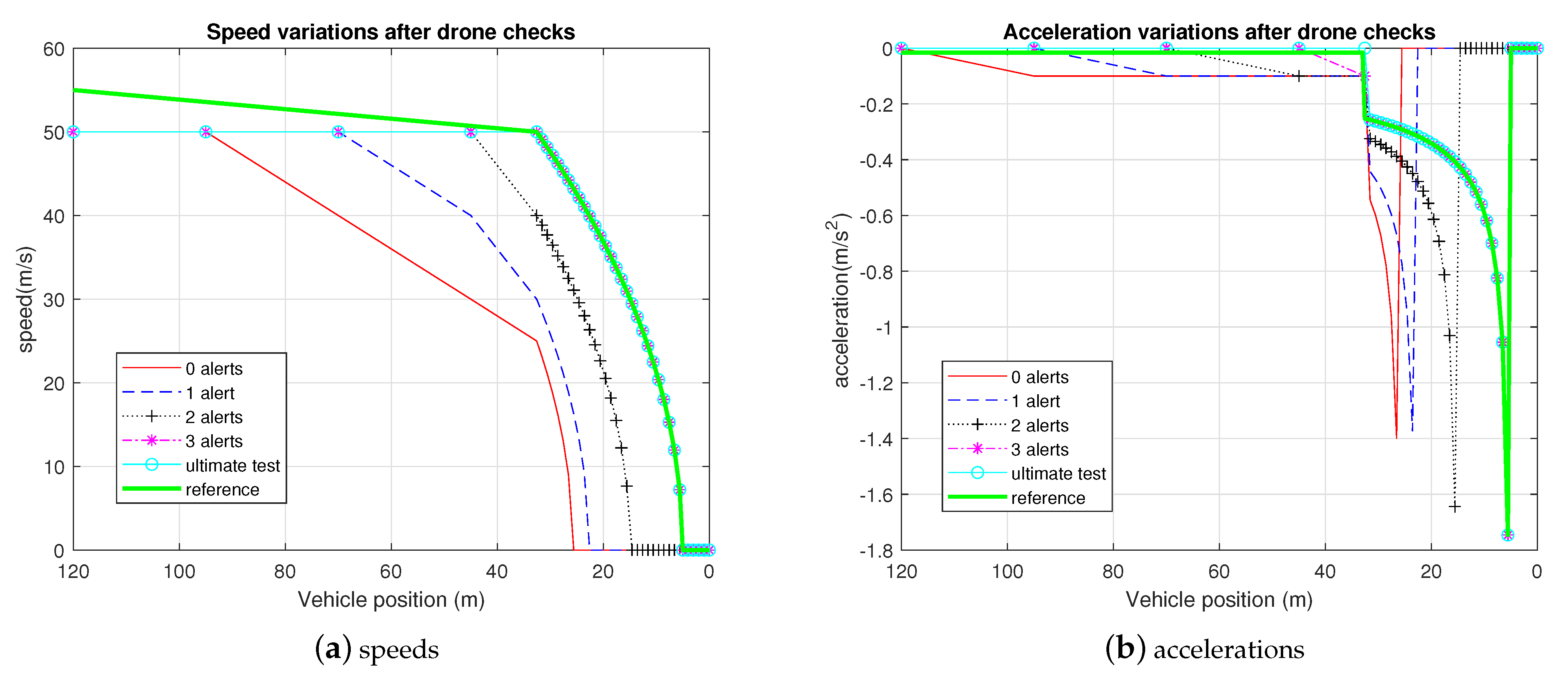
4.2.2. Case of Wet Straight Line
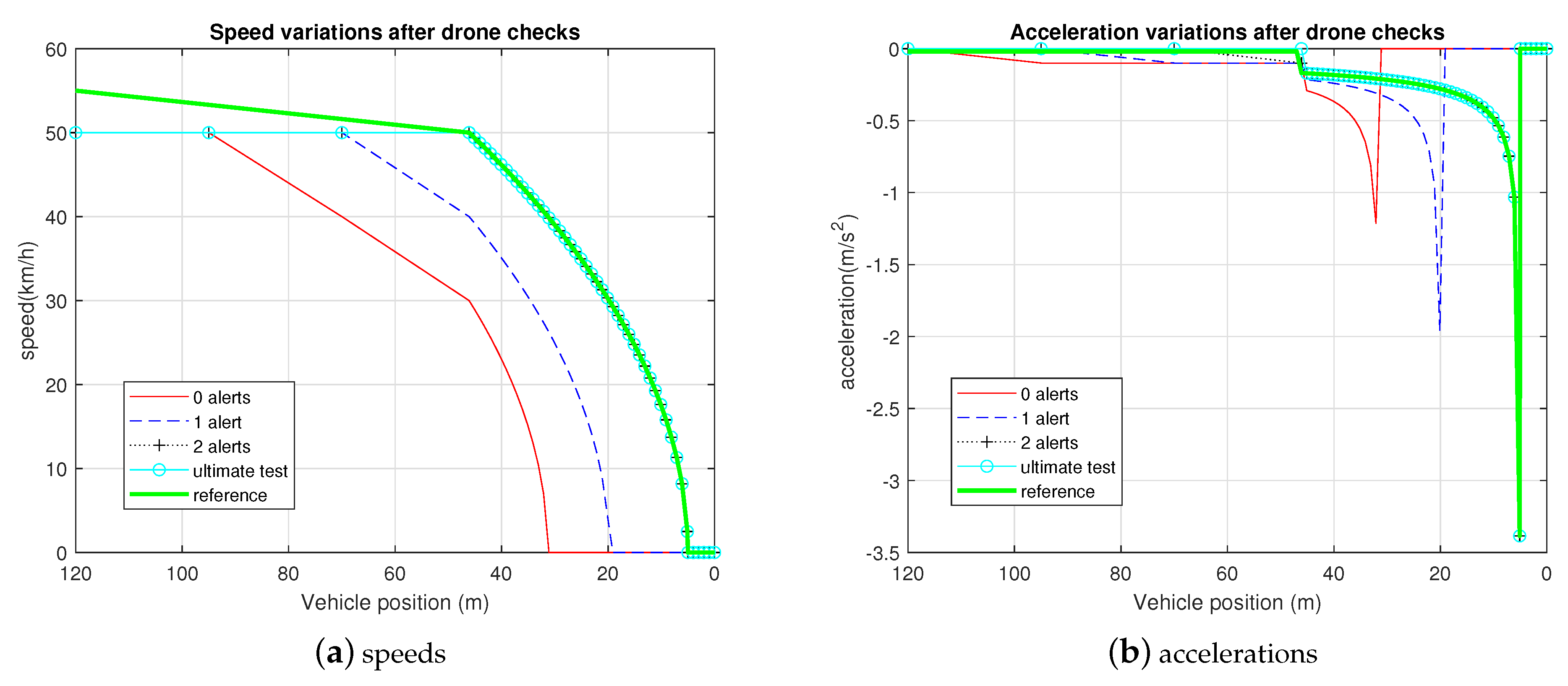
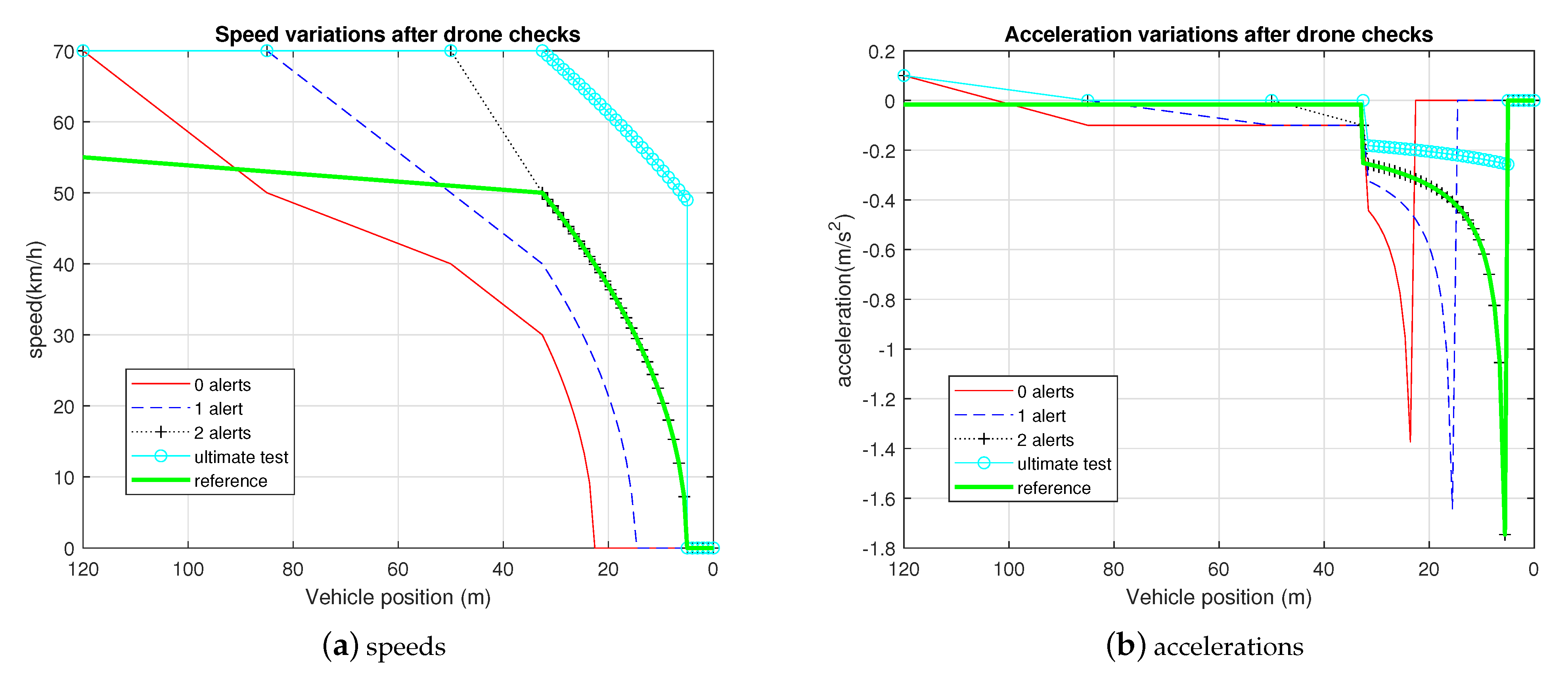
4.2.3. Case of Dry Curved Line
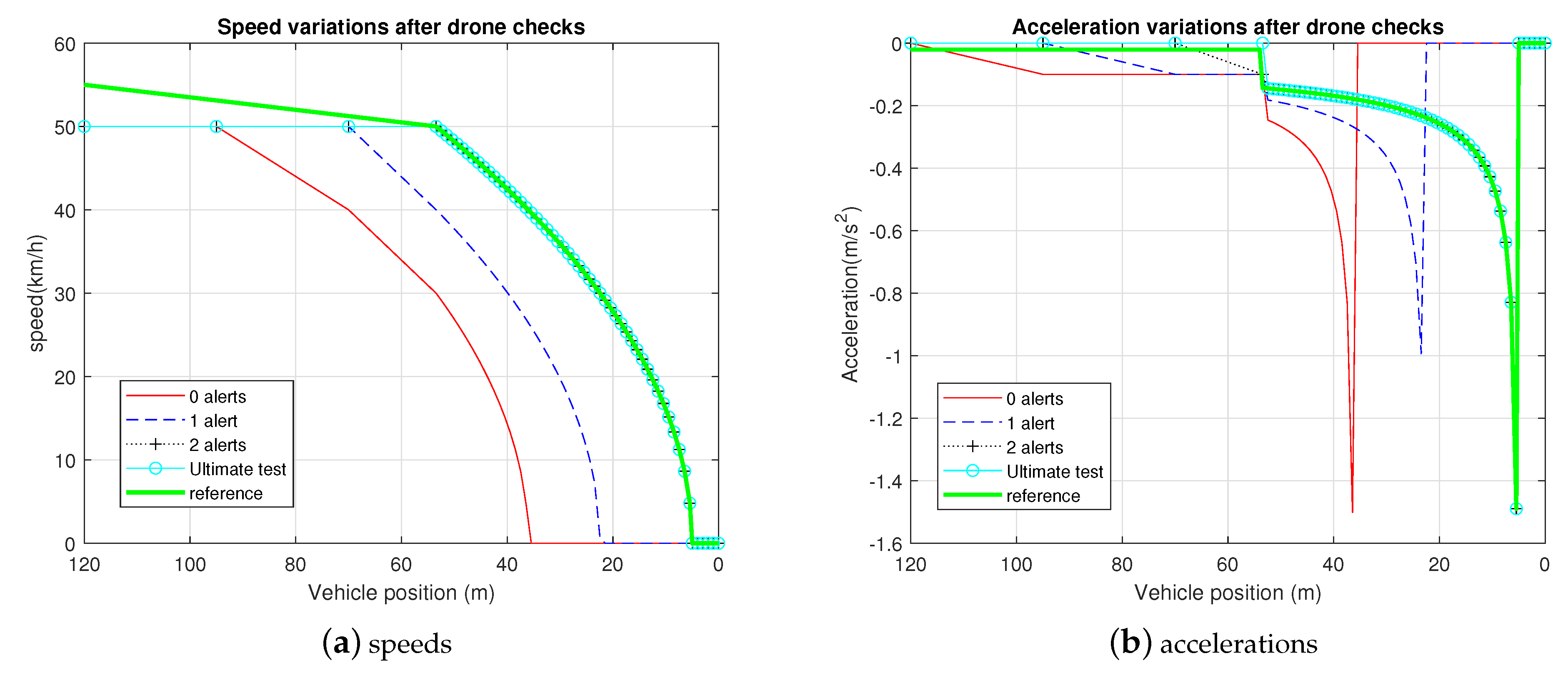
4.2.4. Case of Wet Curved Line
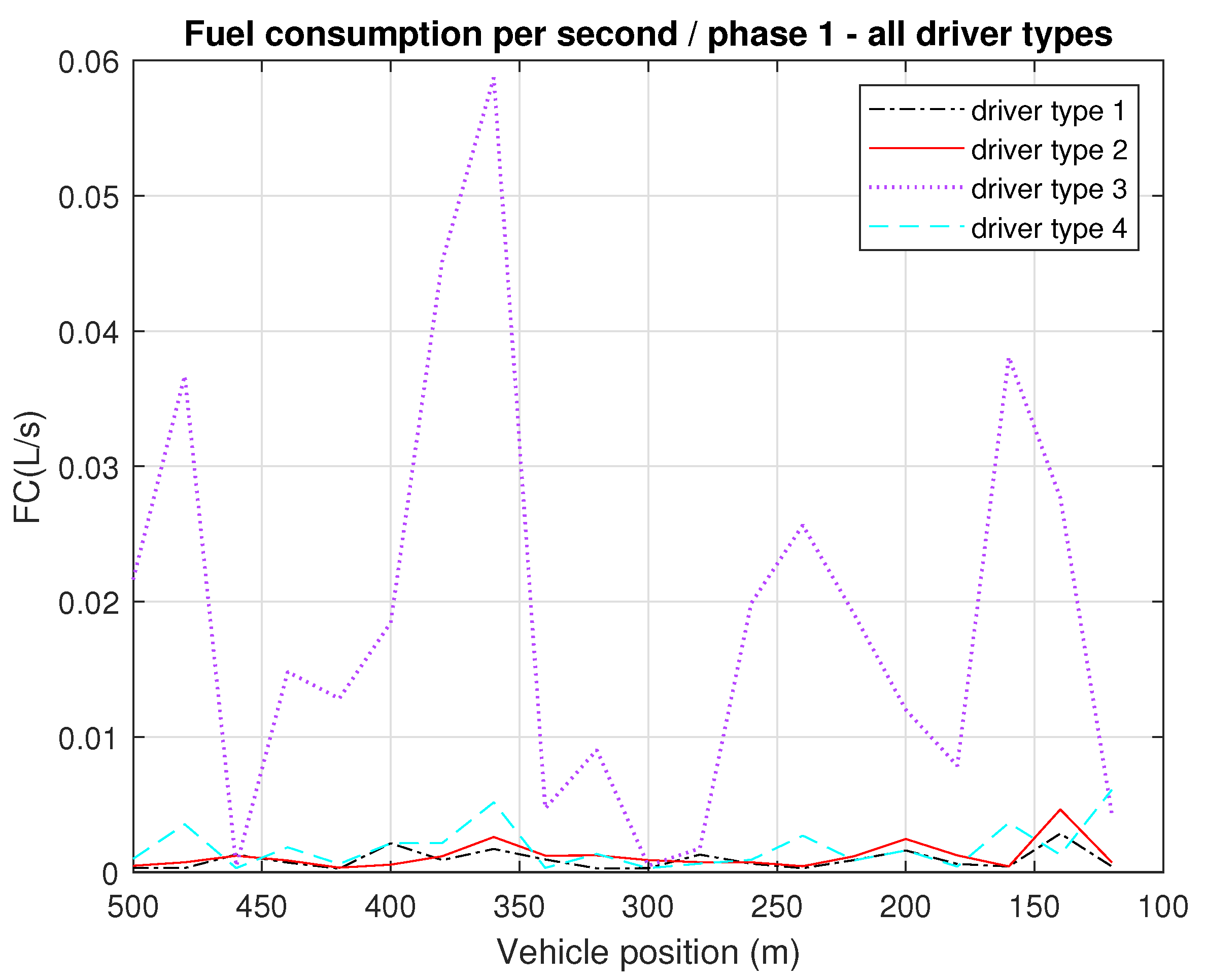
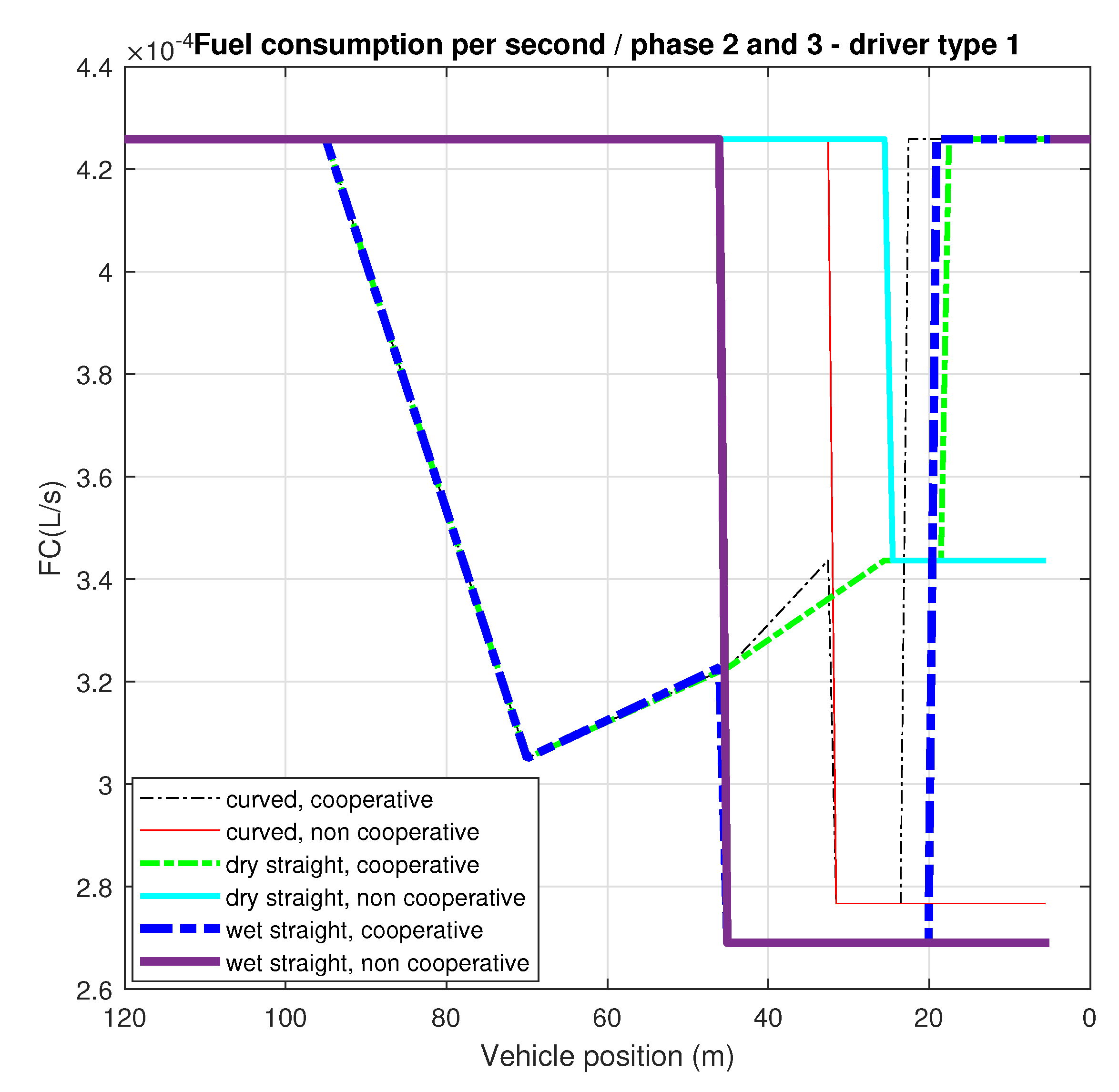
4.3. Assessment of Power and Fuel Consumption
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| U2V | UAV to Vehicle communication |
| U2I | UAV to Infrastructure communication |
| C-ITS | Cooperative Intelligent Transportation System |
| UAV | Unmanned Aerial Vehicle |
| V2X | Vehicle to Everything communication |
| X2V | Everything to Vehicle communication |
| VRU | Vulnerable Road Users |
| VLOS | Visual Line Of Sight |
References
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. UAV-Based Traffic Analysis: A Universal Guiding Framework Based on Literature Survey. Transp. Res. Procedia 2017, 22, 541–550. [Google Scholar] [CrossRef]
- Chen, L.; Englund, C. Cooperative Intersection Management: A Survey. IEEE Trans. Intell. Transp. Syst. 2016, 17, 570–586. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Available online: https://droneregulations.info (accessed on 24 December 2020).
- Radio Regulation for Drones—How REVOsdr Untangles a Tangled World v.2. Available online: https://www.twevo.net/2017/11/27/radio-regulation-for-drones-how-revosdr-untangles-a-tangled-world/ (accessed on 27 November 2017).
- Zhu, J.; Chen, S.; Tu, W.; Sun, K. Tracking and Simulating Pedestrian Movements at Intersections Using Unmanned Aerial Vehicles. Remote Sens. 2019, 11, 925. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Zeng, W.; Yu, G.; Wang, Y. Surrogate Safety Analysis of Pedestrian-Vehicle Conflict at Intersections Using Unmanned Aerial Vehicle Videos. J. Adv. Transp. 2017, 2017, 5202015. [Google Scholar] [CrossRef] [Green Version]
- Coifman, B.; McCord, M.; Mishalani, R.G.; Iswalt, M.; Ji, Y. Roadway traffic monitoring from an unmanned aerial vehicle. IEE Proc. Intell. Transp. Syst. 2006, 153, 11. [Google Scholar] [CrossRef] [Green Version]
- Salvo, G.; Caruso, L.; Scordo, A. Urban Traffic Analysis through an UAV. Procedia Soc. Behav. Sci. 2014, 111, 1083–1091. [Google Scholar] [CrossRef] [Green Version]
- Puri, A. A Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Surveillance. In University of South Florida-Internal Report; University of South Florida: Tampa, FL, USA, 2005. [Google Scholar]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Monitoring. In Handbook of Unmanned Aerial Vehicles; Springer: Dodlerk, The Netherlands, 2014; pp. 2643–2666. [Google Scholar] [CrossRef]
- Reshma, R.; Ramesh, T.; Sathishkumar, P. Security situational aware intelligent road traffic monitoring using UAVs. In Proceedings of the 2016 International Conference on VLSI Systems, Architectures, Technology and Applications (VLSI-SATA), Bangalore, India, 10–12 January 2016. [Google Scholar] [CrossRef]
- Millisher, M.; Lubetzki, M. Drone de signalisation et d’information—Demande de brevet FR1870604 A1. 2018. Available online: https://www.inpi.fr/fr/base-brevets (accessed on 24 December 2020).
- García-Castellano, M.; González-Romo, J.M.; Gómez-Galán, J.A.; García-Martín, J.P.; Torralba, A.; Pérez-Mira, V. ITERL: A Wireless Adaptive System for Efficient Road Lighting. Sensors 2019, 19, 5101. [Google Scholar] [CrossRef] [Green Version]
- Ghosal, A.; Conti, M. Security issues and challenges in V2X: A Survey. Comput. Netw. 2020, 169, 107093. [Google Scholar] [CrossRef]
- Shrestha, R.; Nam, S.Y.; Bajracharya, R.; Kim, S. Evolution of V2X Communication and Integration of Blockchain for Security Enhancements. Electronics 2020, 9, 1338. [Google Scholar] [CrossRef]
- Martinez-Heredia, J.M.; Garcia, Z.; Mora-Jimenez, J.L.; Esteban, S.; Gavilan, F. Development of an Emergency Radio Beacon for Small Unmanned Aerial Vehicles. IEEE Access 2018, 6, 21570–21581. [Google Scholar] [CrossRef]
- Mozaffari, M. Wireless Communications and Networking withUnmanned Aerial Vehicles: Fundamentals, Deployment, and Optimization. Ph.D. Thesis, Virginia Polytechnic Institute, Blacksburg, VA, USA, 2018. [Google Scholar]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-Aided Networks: Aerial-Ground Cooperative Vehicular Networking Architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Jia, S.; Zhang, L. Modelling unmanned aerial vehicles base station in ground-to-air cooperative networks. IET Commun. 2017, 11, 1187–1194. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- Wang, X.; Fu, L.; Zhang, Y.; Gan, X.; Wang, X. VDNet: An infrastructure-less UAV-assisted sparse VANET system with vehicle location prediction. Wirel. Commun. Mob. Comput. 2016, 16, 2991–3003. [Google Scholar] [CrossRef]
- Radenkovic, M.; Huynh, V.S.H.; John, R.; Manzoni, P. Enabling Real-time Communications and Services in Heterogeneous Networks of Drones and Vehicles. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Hernández-Orallo, E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Experimental characterization of UAV-to-car communications. Comput. Netw. 2018, 136, 105–118. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Calafate, C.T.; Cano, J.C.; Ji, Y.; Hernandez-Orallo, E.; Manzoni, P. 3D Simulation Modeling of UAV-to-Car Communications. IEEE Access 2019, 7, 8808–8823. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Calafate, C.T.; Cano, J.C.; Krinkin, K.; Klionskiy, D.; Hernández-Orallo, E.; Manzoni, P. Three Dimensional UAV Positioning for Dynamic UAV-to-Car Communications. Sensors 2020, 20, 356. [Google Scholar] [CrossRef] [Green Version]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Sewalkar, P.; Seitz, J. Vehicle-to-Pedestrian Communication for Vulnerable Road Users: Survey, Design Considerations, and Challenges. Sensors 2019, 19, 358. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sutheerakul, C.; Kronprasert, N.; Kaewmoracharoen, M.; Pichayapan, P. Application of Unmanned Aerial Vehicles to Pedestrian Traffic Monitoring and Management for Shopping Streets. Transp. Res. Procedia 2017, 25, 1717–1734. [Google Scholar] [CrossRef]
- Sha, D.; Guo, Y.; Ding, Y. Pedestrian Safety Diagnosis at Signalized Crosswalks Using Traffic Conflict Techniques. In Proceedings of the CICTP, Shanghai, China, 6–9 July 2016; American Society of Civil Engineers: Reston, VA, USA, 2016. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, H.; Yang, W.; Jin, W.; Zhu, W. Pedestrian Path Prediction for Autonomous Driving at Un-Signalized Crosswalk Using W/CDM and MSFM. IEEE Trans. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Kozak, F. Traffic Control System, Controller and Method for Directing Vehicle Behavior at a Defined Spatial Location. U.S. Patent Application No. 16/169,545, 30 April 2020. [Google Scholar]
- Gao, Y.; Cheng, Y.; Zhang, H.; Zou, N. Dynamic illuminance measurement and control used for smart lighting with LED. Measurement 2019, 139, 380–386. [Google Scholar] [CrossRef]
- Beckx, C.; Lefebvre, W.; Degraeuwe, B.; Vanhulsel, M.; Kochan, B.; Bellemans, T.; Dhondt, S.; Panis, L.I. Assessing the environmental impact associated with different trip purposes. Transp. Res. Part D Transp. Environ. 2013, 18, 110–116. [Google Scholar] [CrossRef]
- Almannaa, M.H.; Chen, H.; Rakha, H.A.; Loulizi, A.; El-Shawarby, I. Field implementation and testing of an automated eco-cooperative adaptive cruise control system in the vicinity of signalized intersections. Transp. Res. Part D Transp. Environ. 2019, 67, 244–262. [Google Scholar] [CrossRef]
- Akhegaonkar, S.; Nouveliere, L.; Glaser, S.; Holzmann, F. Smart and Green ACC: Energy and Safety Optimization Strategies for EVs. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 48, 142–153. [Google Scholar] [CrossRef] [Green Version]
- Stillwater, T.; Kurani, K.S. Drivers discuss ecodriving feedback: Goal setting, framing, and anchoring motivate new behaviors. Transp. Res. Part F Traffic Psychol. Behav. 2013, 19, 85–96. [Google Scholar] [CrossRef]
- Liu, M.; Wang, M.; Hoogendoorn, S. Optimal Platoon Trajectory Planning Approach at Arterials. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 214–226. [Google Scholar] [CrossRef]
- Kamalanathsharma, R.K. Eco-Driving in the Vicinity of Roadway Intersections—Algorithmic Development, Modeling, and Testing. Ph.D. Thesis, Virginia Polytechnic Institute, Blacksburg, VA, USA, 2014. [Google Scholar]
- Bento, L.C.; Parafita, R.; Rakha, H.A.; Nunes, U.J. A study of the environmental impacts of intelligent automated vehicle control at intersections via V2V and V2I communications. J. Intell. Transp. Syst. 2019, 23, 41–59. [Google Scholar] [CrossRef]
- Loulizi, A.; Rakha, H.; Bichiou, Y. Quantifying grade effects on vehicle fuel consumption for use in sustainable highway design. Int. J. Sustain. Transp. 2017, 12, 441–451. [Google Scholar] [CrossRef]
- Coiret, A.; Deljanin, E.; Vandanjon, P.O. Vehicle energy savings by optimizing road speed-sectioning. Eur. Transp. Res. Rev. 2020, 12, 1–15. [Google Scholar] [CrossRef]
- Fricke, L. Traffic Accident Reconstruction: Volume 2 of the Traffic Accident Investigation Manual; Northwestern University Traffic Institute: Evanston, IL, USA, 1990. [Google Scholar]
- AASHTO. A Policy on Geometric Design of Highways and Streets, 6th ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2011. [Google Scholar]
- Neji, J. Le Projet Routier; Centre de Publication Universitaire, Ecole Nationale d’Ingénieurs de Tunis: Tunis, Tunisia, 2005; ISBN 9973-51-547-1. [Google Scholar]
- Summala, H. Brake Reaction Times and Driver Behavior Analysis. Transp. Hum. Factors 2000, 2, 217–226. [Google Scholar] [CrossRef]
- Ghandour, R.; Victorino, A.; Doumiati, M.; Charara, A. Tire/road friction coefficient estimation applied to road safety. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (km/h) | 40 | 60 | 80 | 100 | 120 | 140 |
|---|---|---|---|---|---|---|
| (straight dry line) | 0.46 | 0.46 | 0.42 | 0.38 | 0.34 | 0.31 |
| (straight wet line) | 0.23 | 0.23 | 0.21 | 0.19 | 0.17 | 0.155 |
| (curved dry line) | 0.37 | 0.37 | 0.34 | 0.30 | 0.27 | 0.25 |
| (curved wet line) | 0.19 | 0.19 | 0.17 | 0.15 | 0.14 | 0.13 |
| Parameter | Value | Unit |
|---|---|---|
| 50 | km·h | |
| 0.1 g | m·s | |
| 80 | % | |
| 500 | m | |
| 120 | m | |
| 5 | m | |
| 5 | km·h | |
| 0.00042581 | not applicable | |
| 0.000025331 | not applicable | |
| 0.000001 | not applicable |
| Parameter | Value | Unit |
|---|---|---|
| m | 1224 | kg |
| 1.8 | s |
| Driver Profile | Algorithm Outputs |
|---|---|
| Type 1 | Normal driving |
| Type 2 | Unwise driving, speed higher than the limit |
| Type 3 | Uncomfortable driving, residual acceleration |
| Type 4 | Non-vigilant driving, sudden acceleration |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouassida, S.; Neji, N.; Nouvelière, L.; Neji, J. Evaluating the Impact of Drone Signaling in Crosswalk Scenario. Appl. Sci. 2021, 11, 157. https://doi.org/10.3390/app11010157
Bouassida S, Neji N, Nouvelière L, Neji J. Evaluating the Impact of Drone Signaling in Crosswalk Scenario. Applied Sciences. 2021; 11(1):157. https://doi.org/10.3390/app11010157
Chicago/Turabian StyleBouassida, Sana, Najett Neji, Lydie Nouvelière, and Jamel Neji. 2021. "Evaluating the Impact of Drone Signaling in Crosswalk Scenario" Applied Sciences 11, no. 1: 157. https://doi.org/10.3390/app11010157
APA StyleBouassida, S., Neji, N., Nouvelière, L., & Neji, J. (2021). Evaluating the Impact of Drone Signaling in Crosswalk Scenario. Applied Sciences, 11(1), 157. https://doi.org/10.3390/app11010157