Simplified Welch Algorithm for Spectrum Monitoring



Abstract
:1. Introduction
2. Fourier Transform and Welch Algorithm
2.1. DFT & FFT
2.2. Welch’s Method
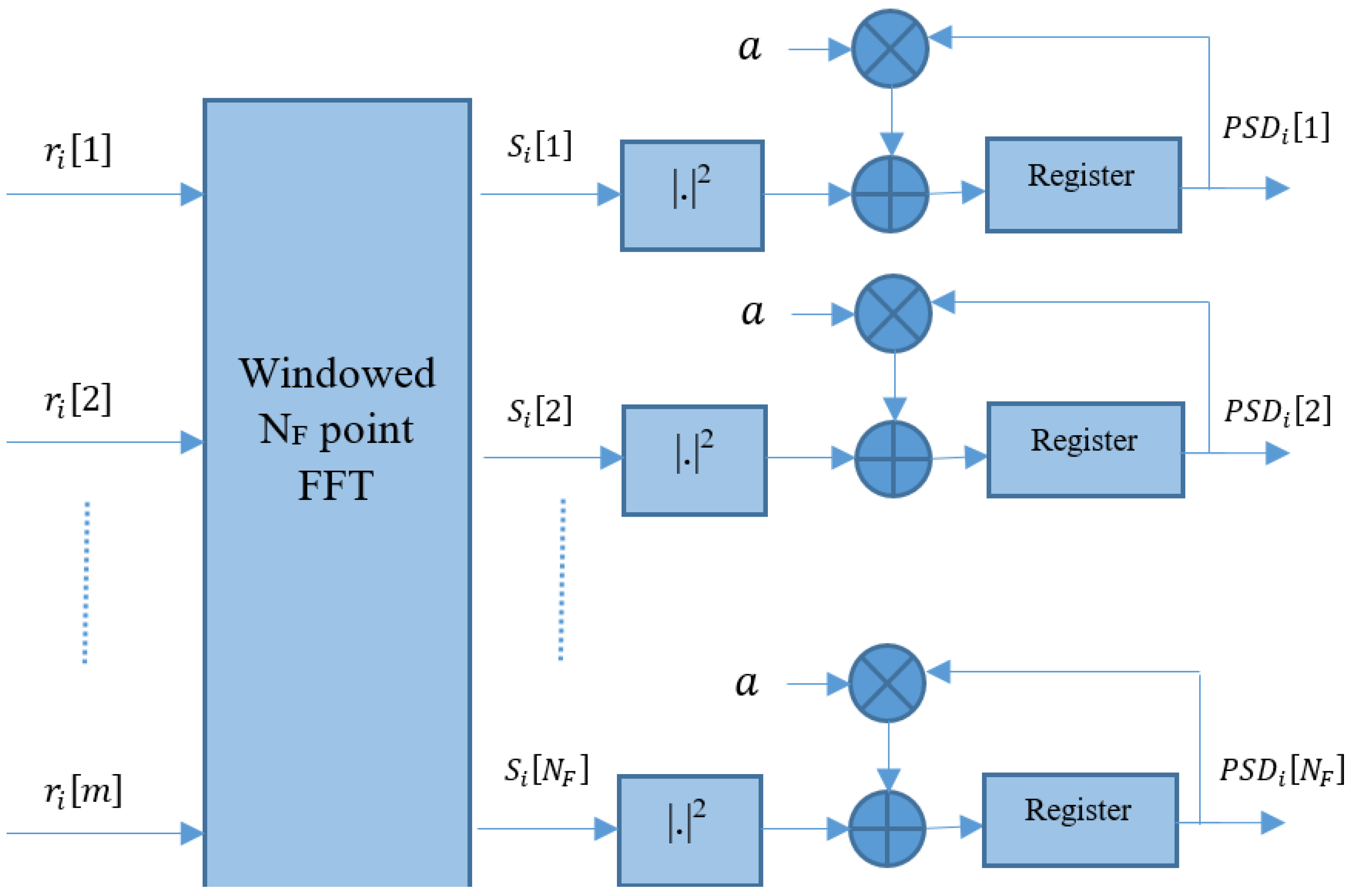
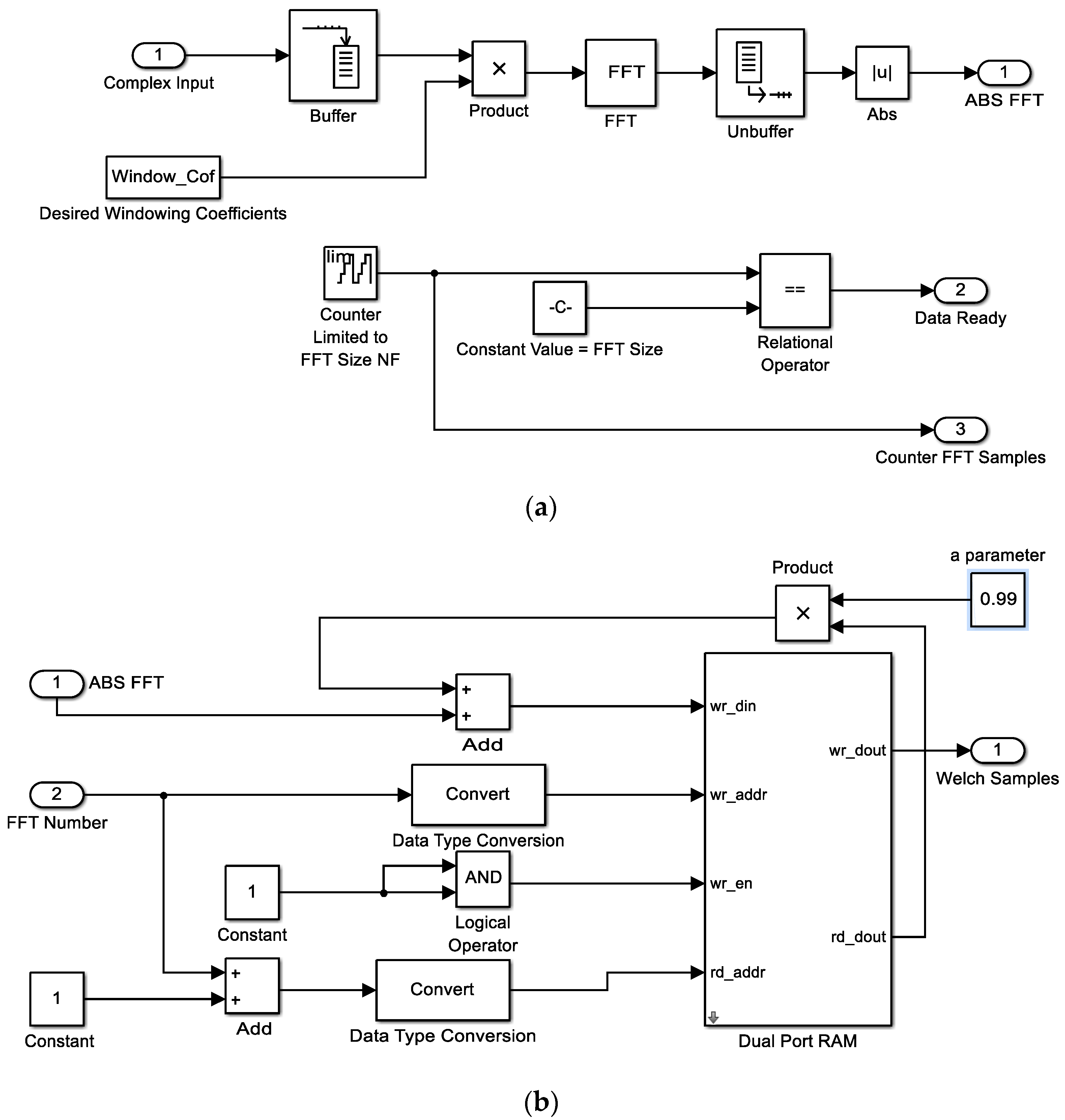
3. Modified Welch Algorithm
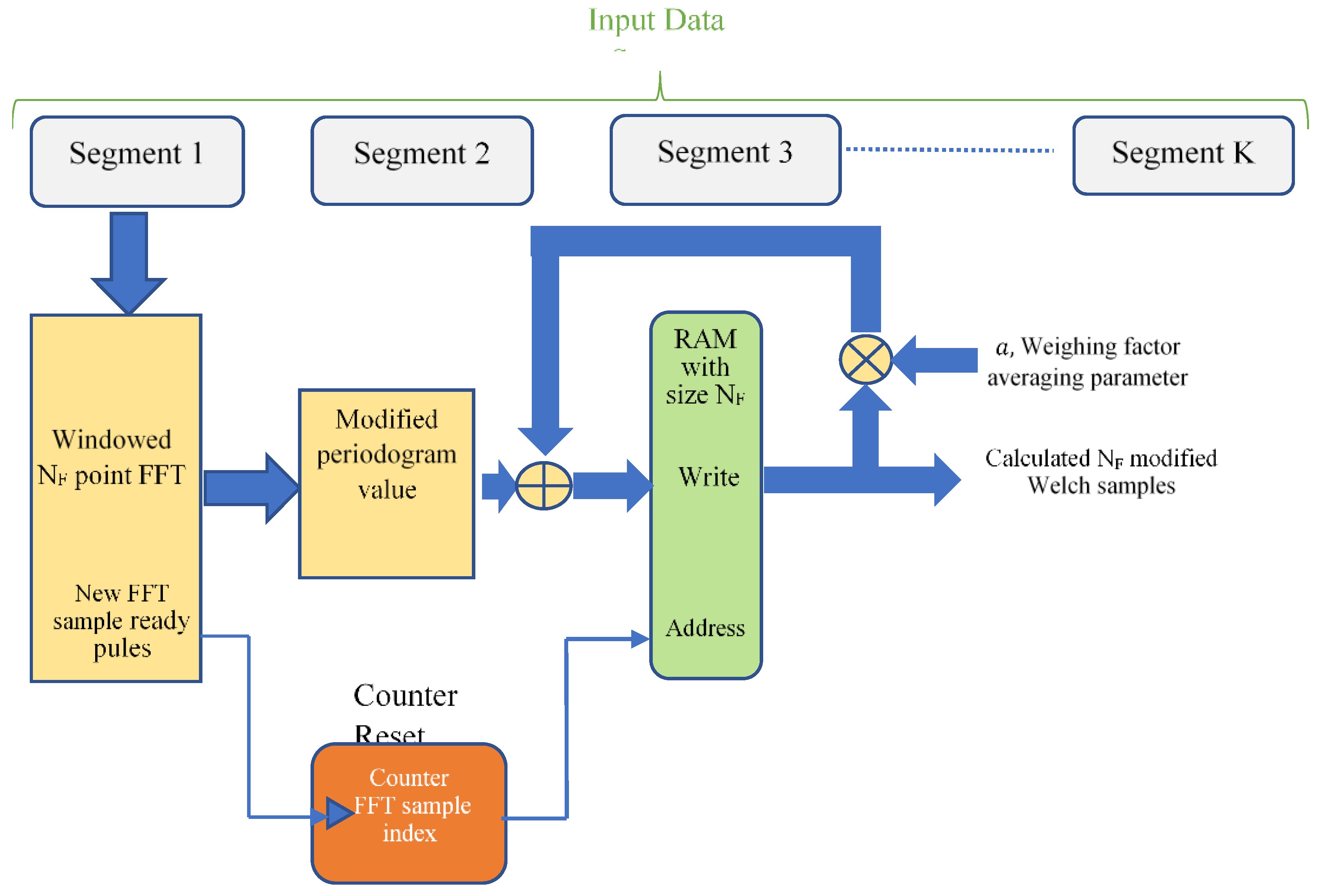
3.1. Proposed Algorithm
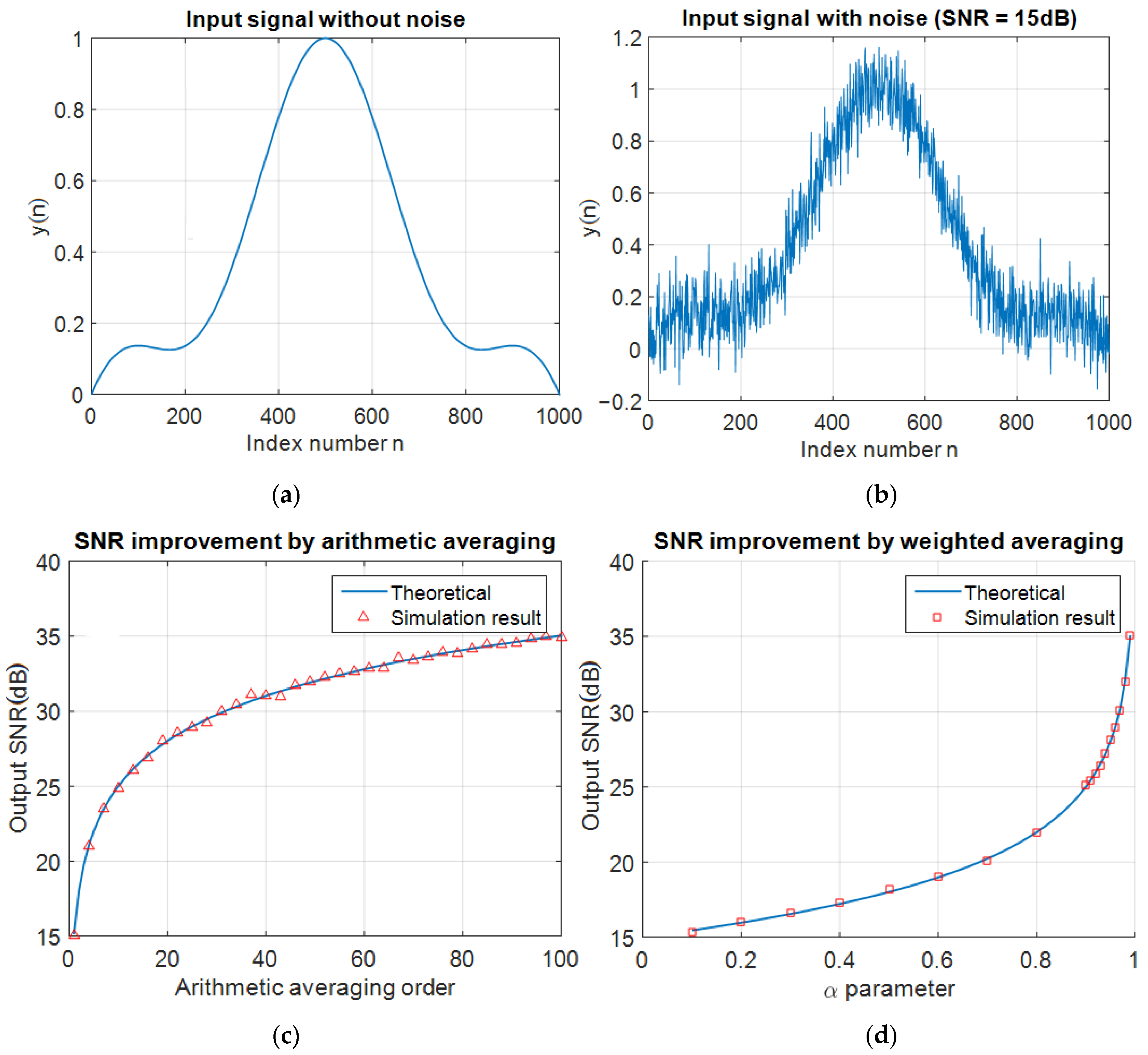
- SNR improvement: averaging over more samples can reduce the noise power level and enhance the SNR of desired signal.
- Precise estimation: by utilizing FFT samples from the past, each frequency component can be estimated with more precision.
- Implementing arithmetic averaging of N order, requires N RAM components and massively increases the complexity for real time implementation.
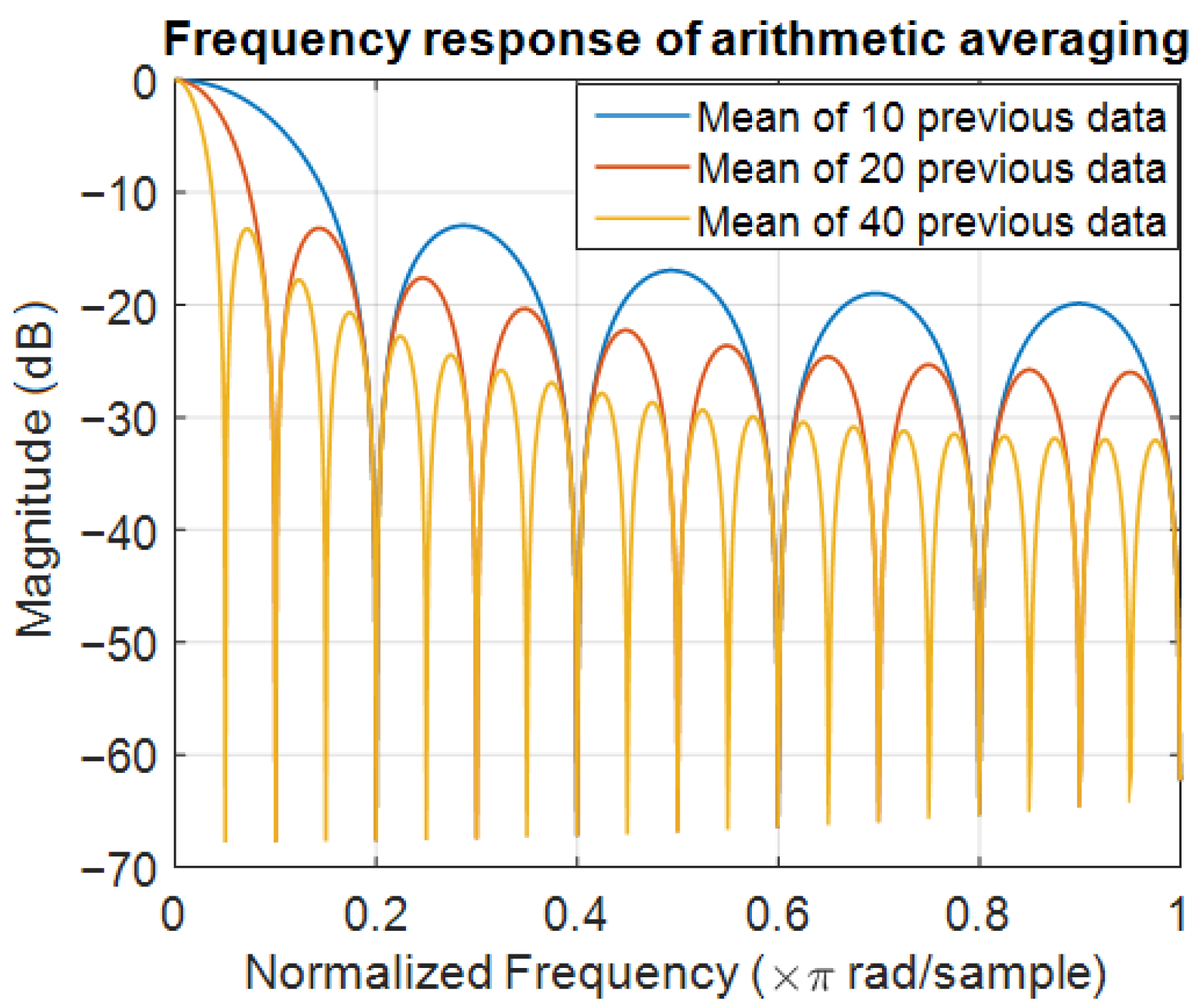
- All the previous samples are weighted by the same coefficient. For example, the sample with distance of 10 time intervals from the current sample is weighted by the same gain as the sample with the distance of 100 time intervals. However, in many systems, it is suitable to weight the samples based on their distance from current samples.
- Weighting each FFT packet based on its distance from the current packet, this idea helps to preserve the fast variable frequency component in spectrum.
- A recursive and simple algorithm can replace the required memories for the arithmetic averaging.
- This design needs each FFT sample to implement weighted averages separately, thus the amount of multiplications and summations will increase significantly.
- It is not flexible enough to support different FFT sizes. For example, if the FFT size changes from 1 K to 2 K, all of the design must change completely to support it.
- Certain types of FFT blocks, e.g., in the Xilinx DSP Generator library, work in a series manner that makes the design more complex.
3.2. Theoretical Analysis
- Desired SNR improvement for system
- Equivalent average ordering N in normal Welch algorithm
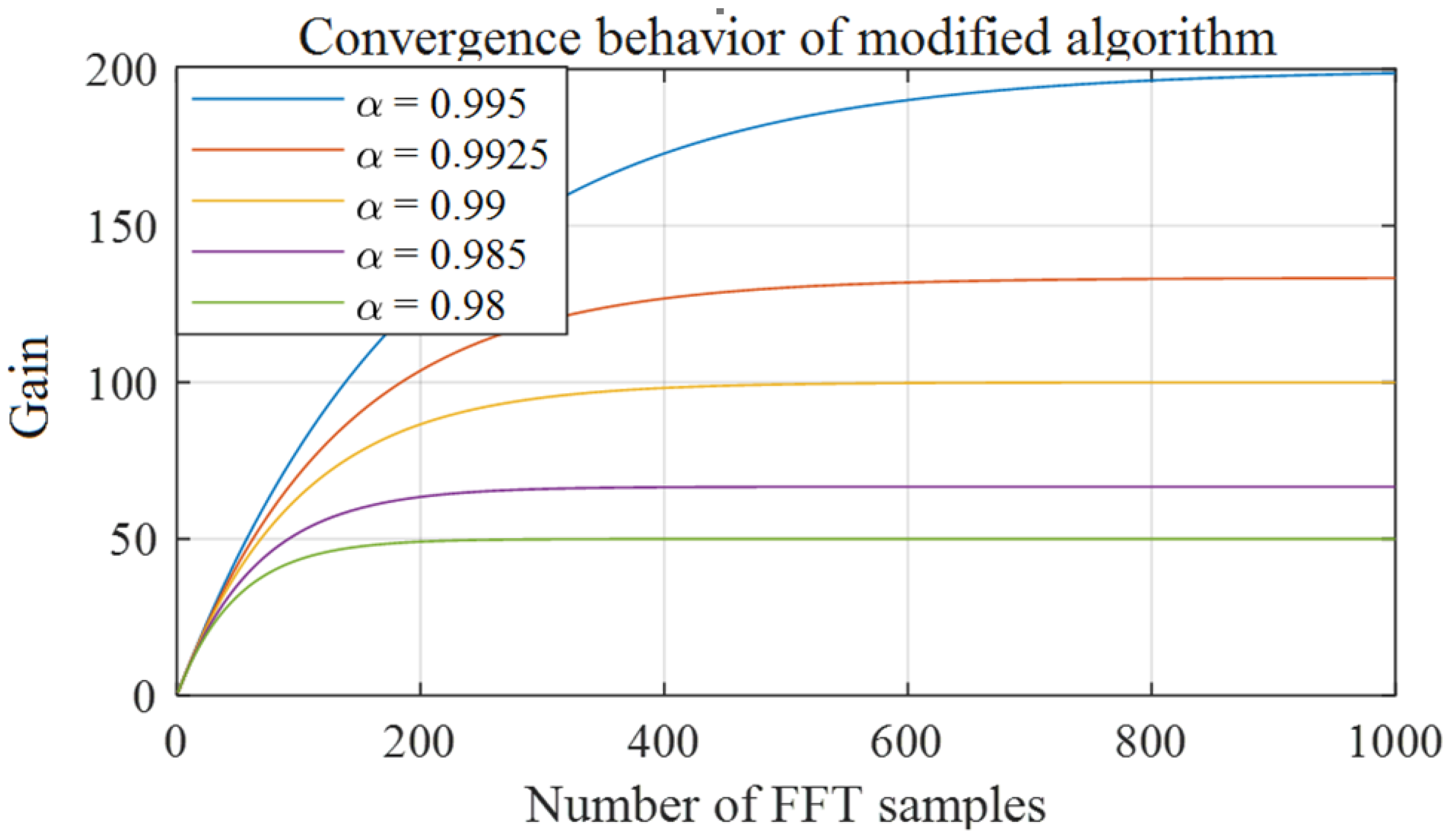
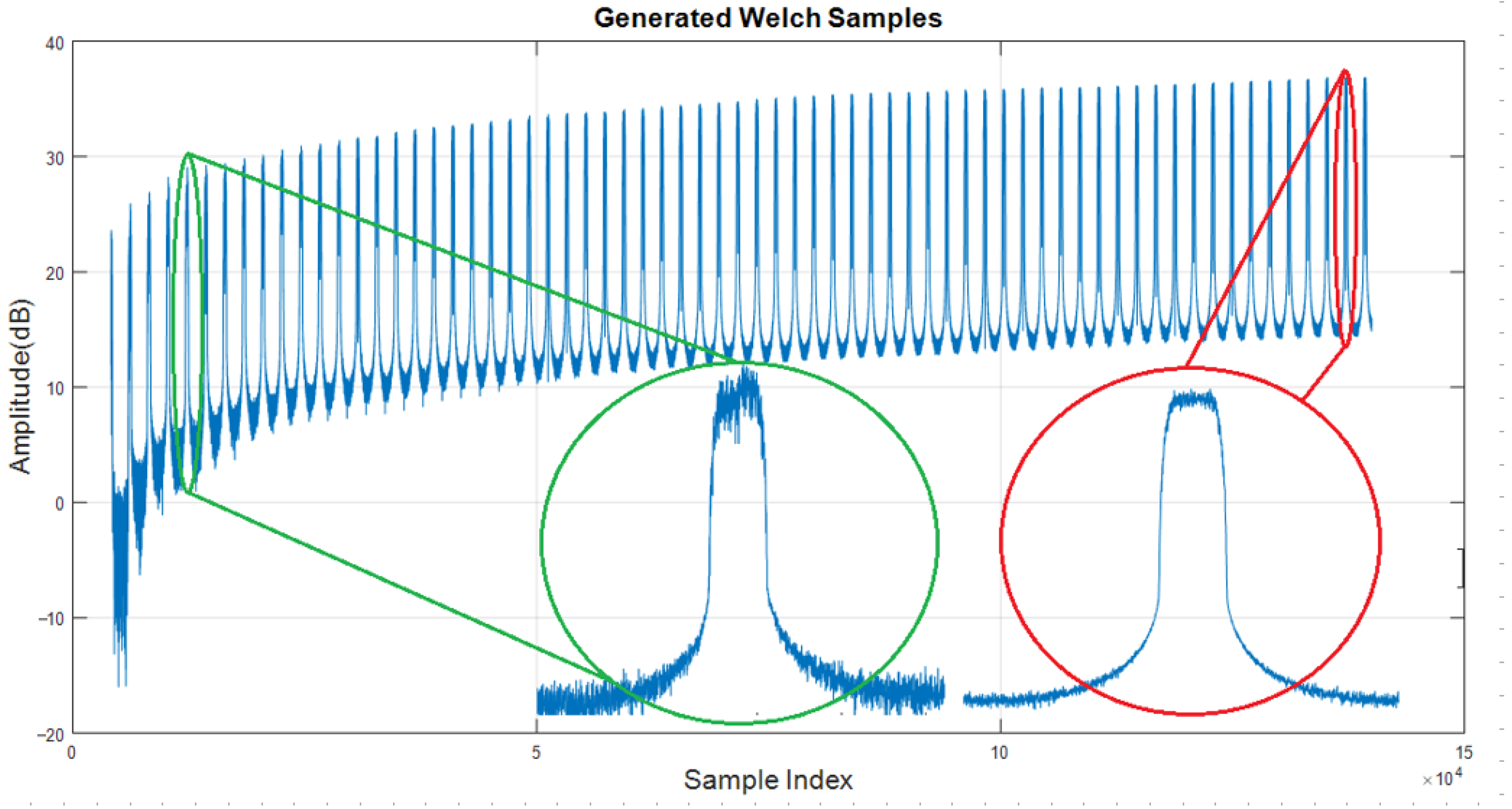
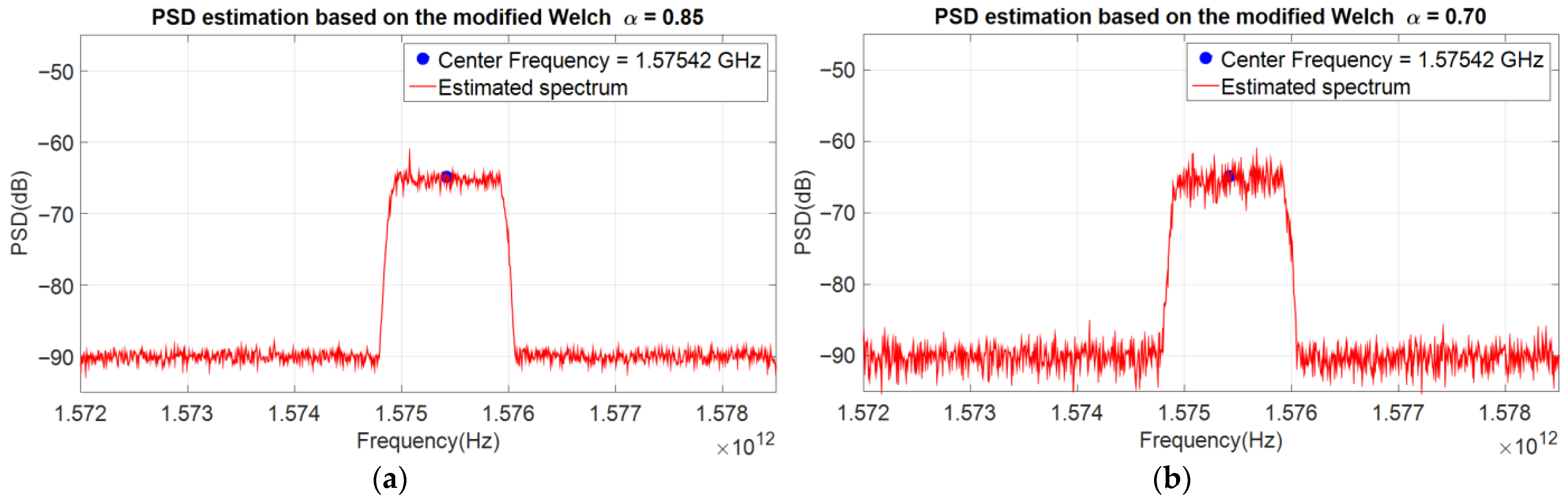
- Convergence time: At first, it seems that the sorted values inside the RAM will grow to an unlimited value. However, because α is smaller than one, the sorted values (Welch spectrum) grow to a certain value and after that the system will converge to a final spectrum. A larger α needs more convergence time and generates larger sorted values in the RAM. Thus, if the system is monitoring data with fast variations, smaller values should be used to enable faster tracking. Another important point here is the hardware limitation for saving the large values inside the RAM. If the saved values are larger than the computational capability of system, a saturation error will happen.
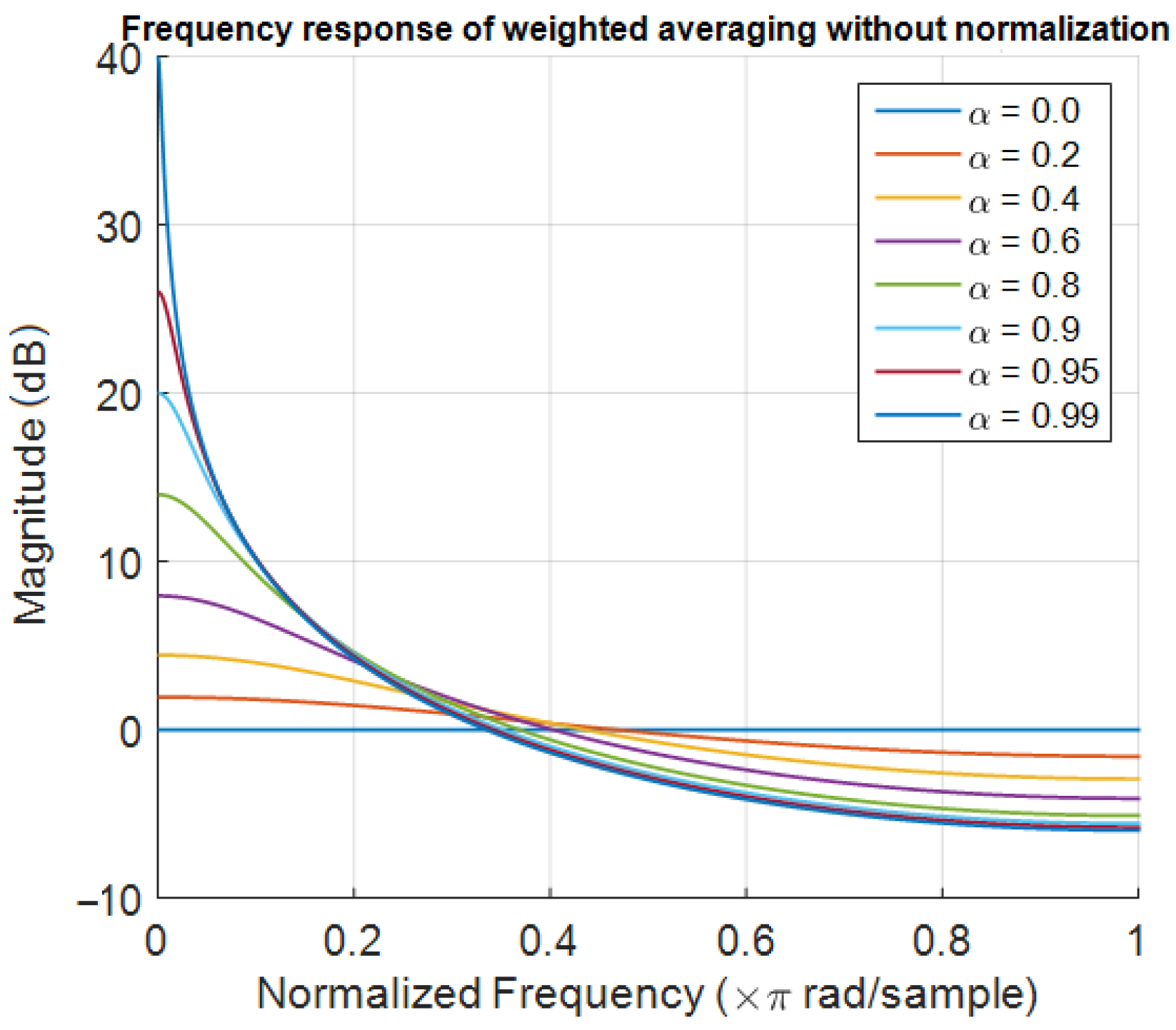
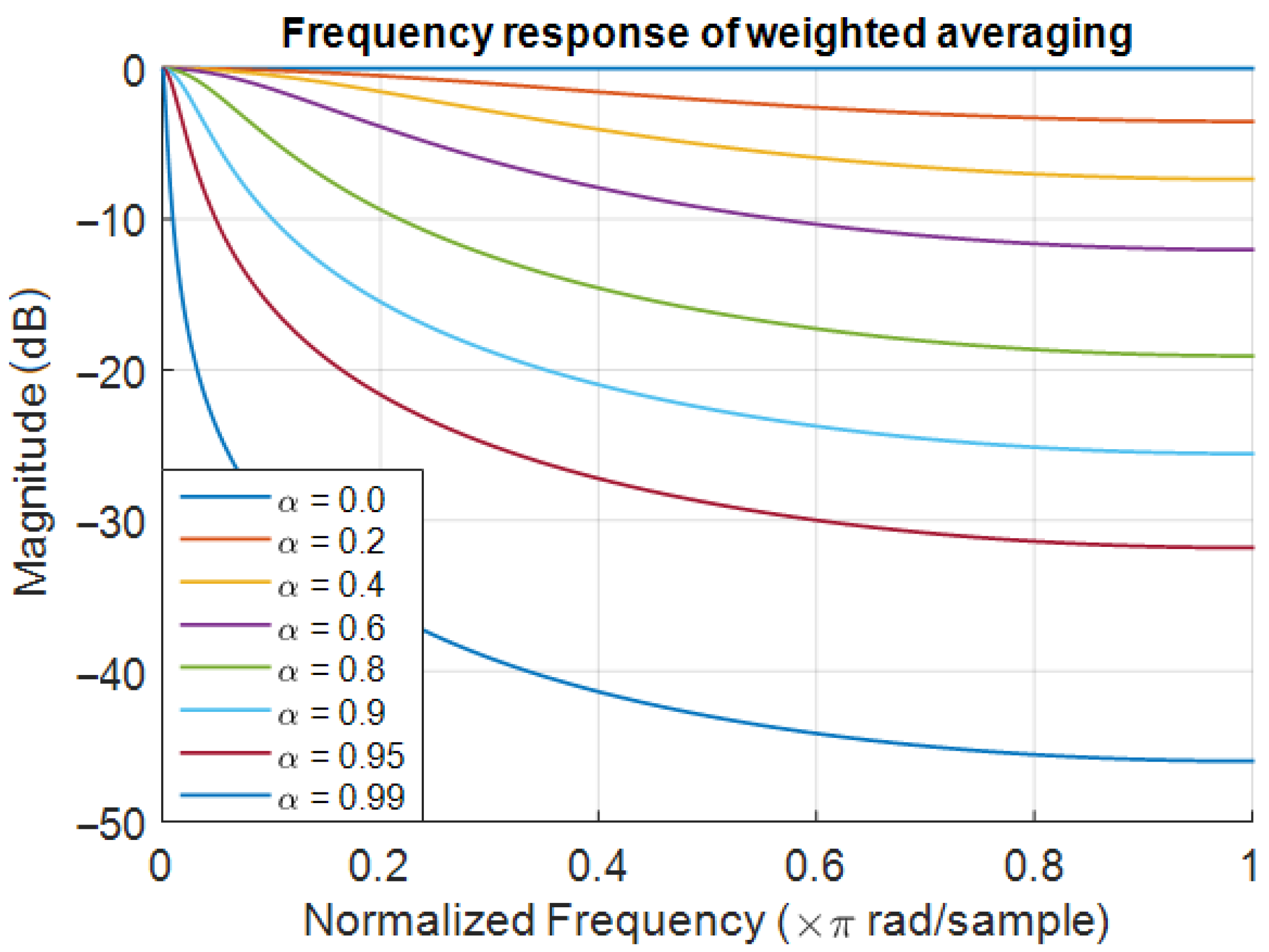
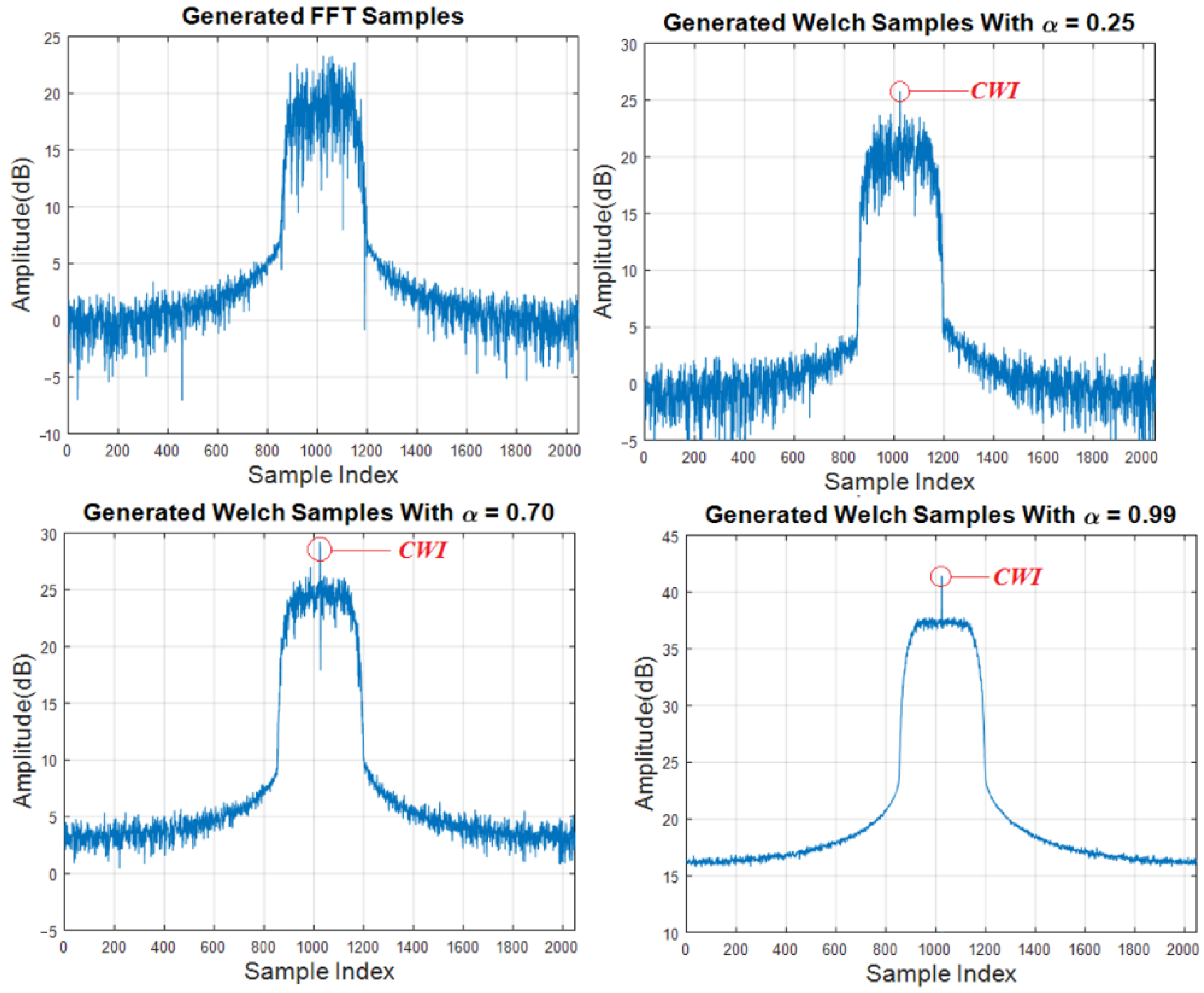
- Obtained spectrum shape: The α determines the dependency of the obtained spectrum to the past. A larger α means more averaging over the past FFT samples. As a result, the spectrum obtained from a larger α is smoother with the less noise.
4. Simulations
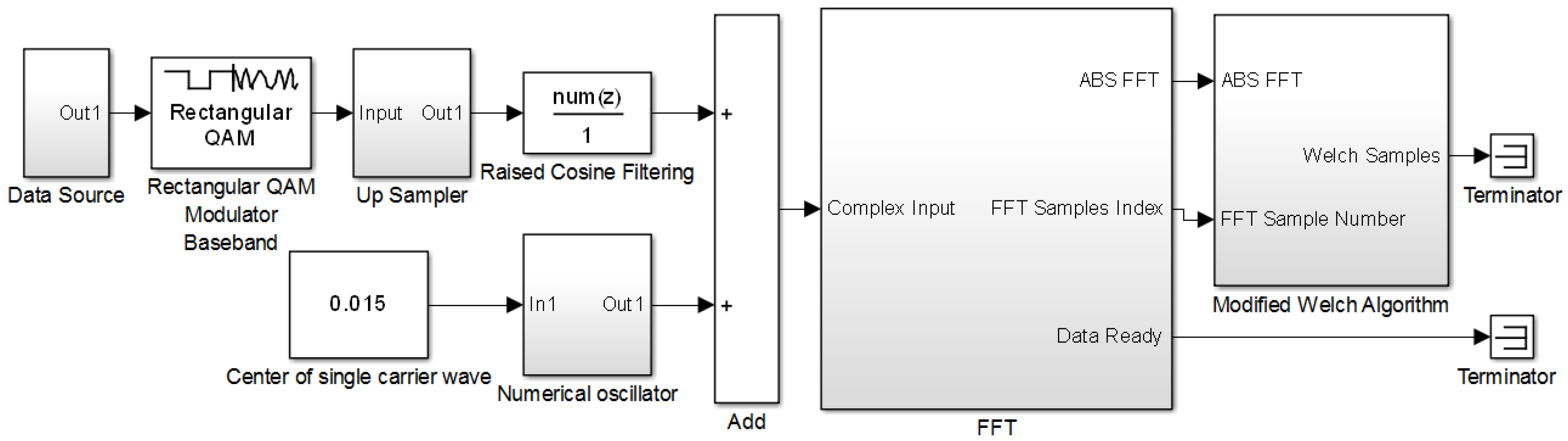
4.1. Simulation Setup
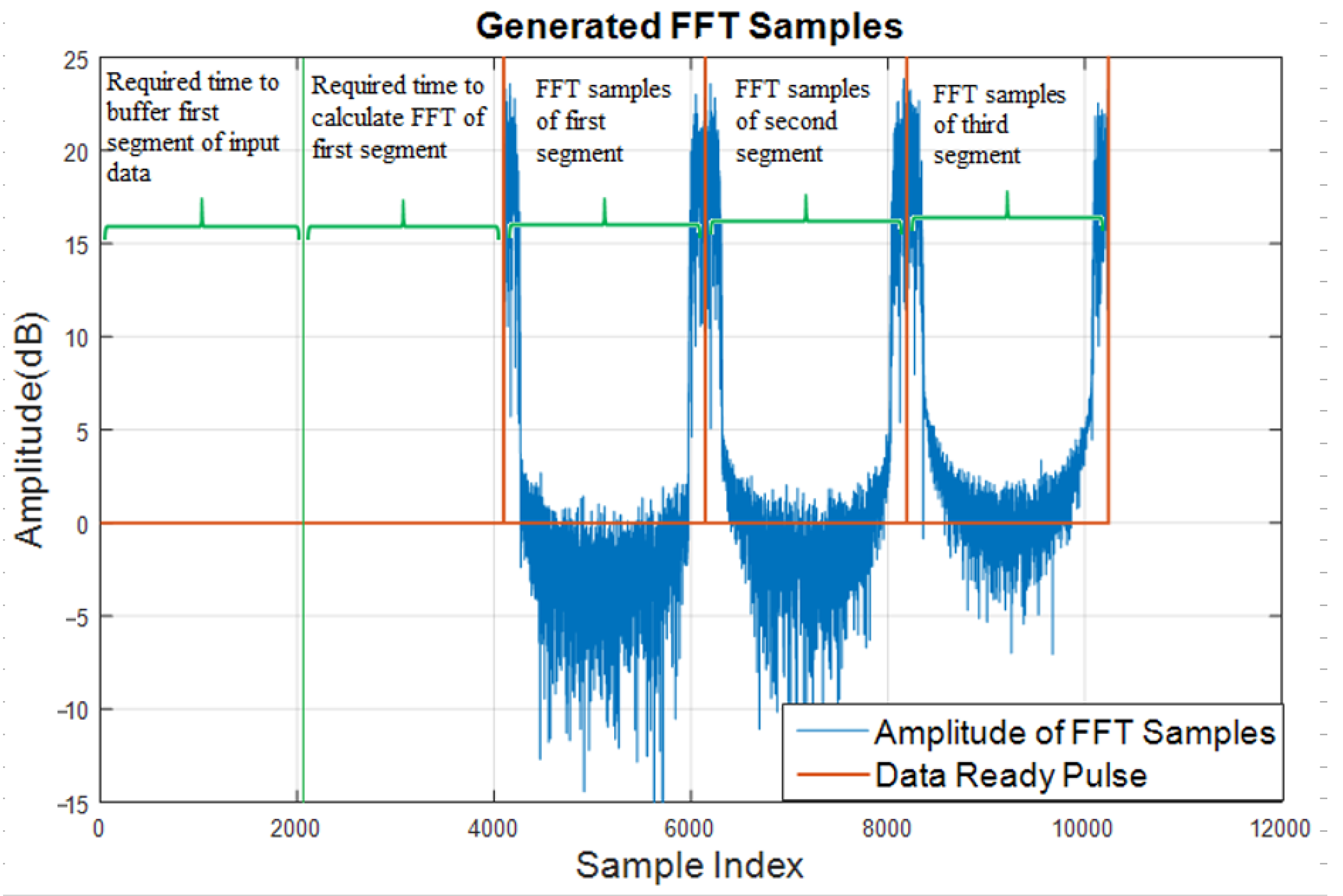
4.2. Simulation Results
5. Laboratory Tests and Real-Time Validation
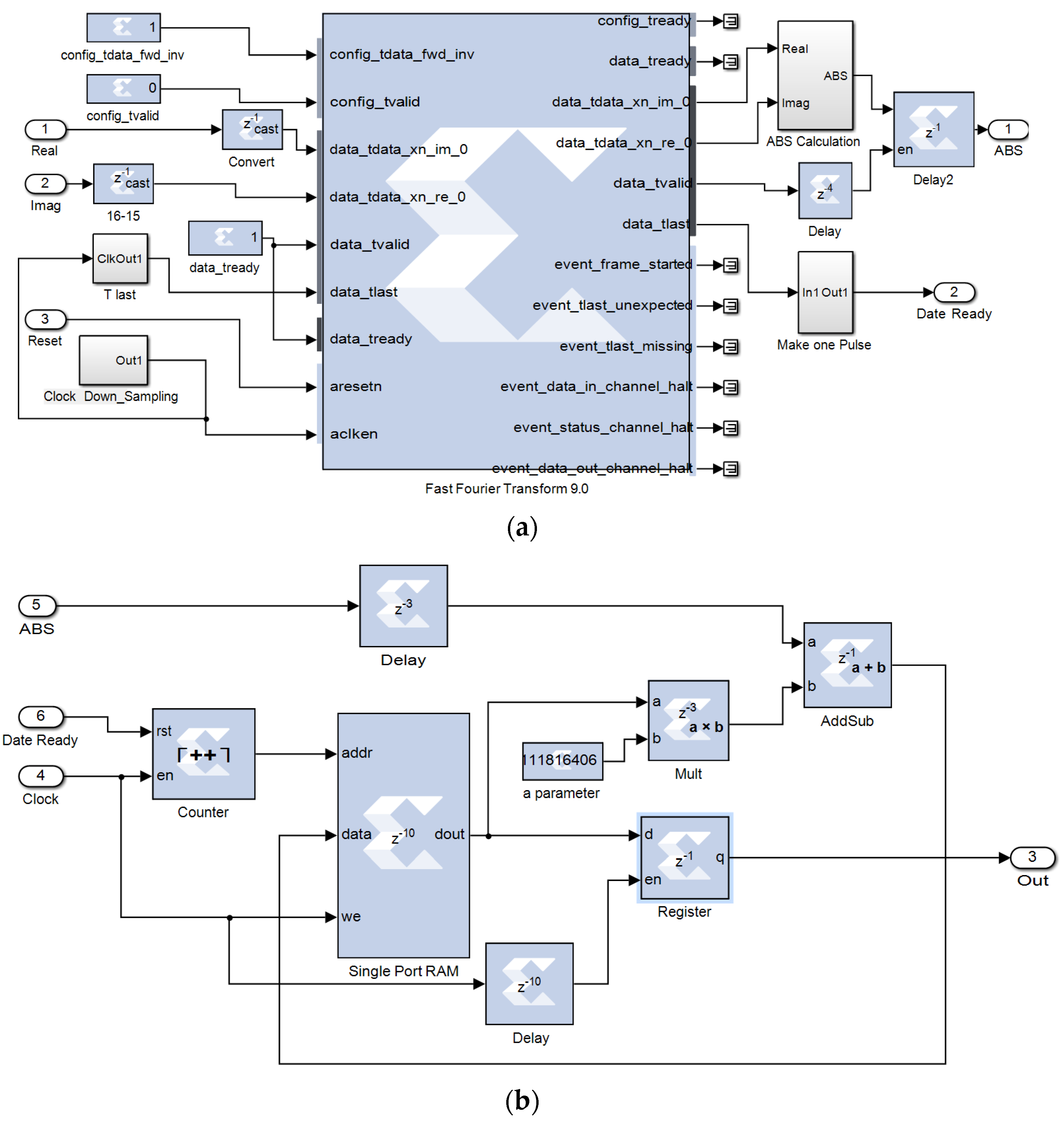
5.1. Design in Xilinx DSP Generator Library
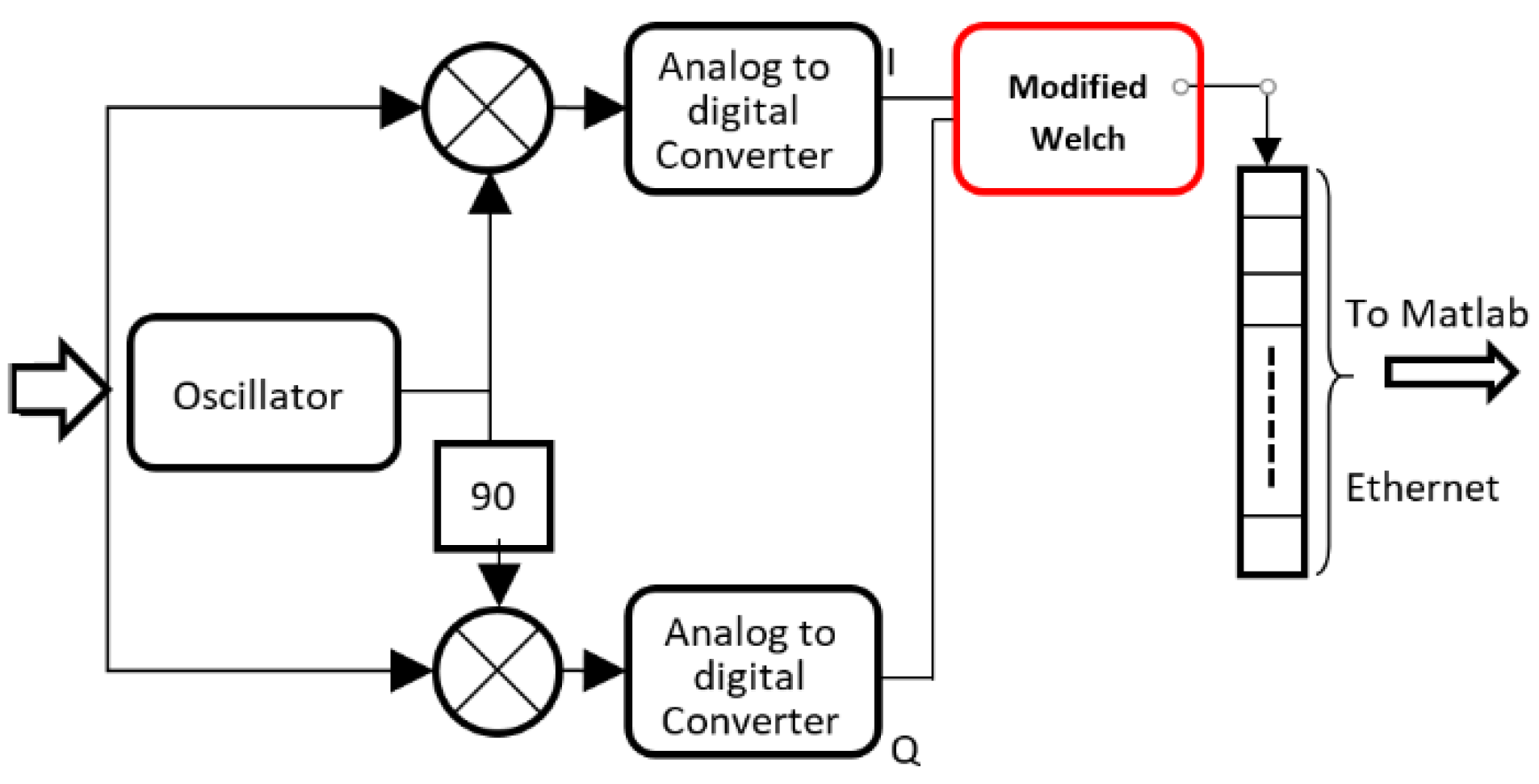
5.2. BEEcube SDR
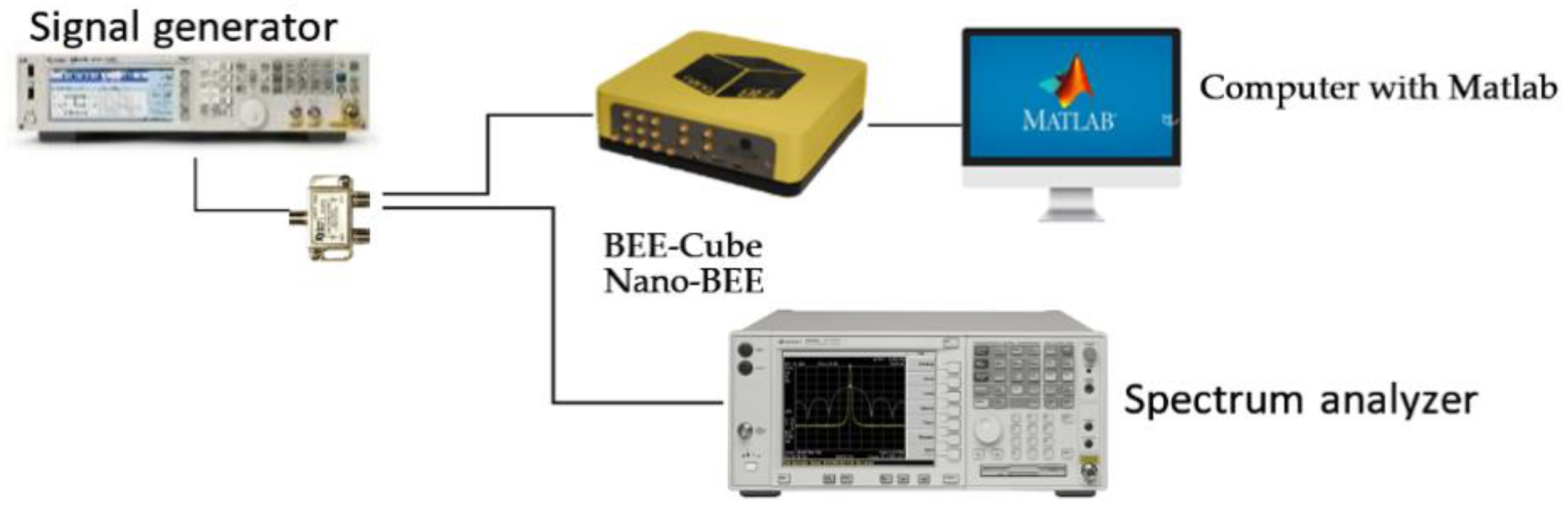
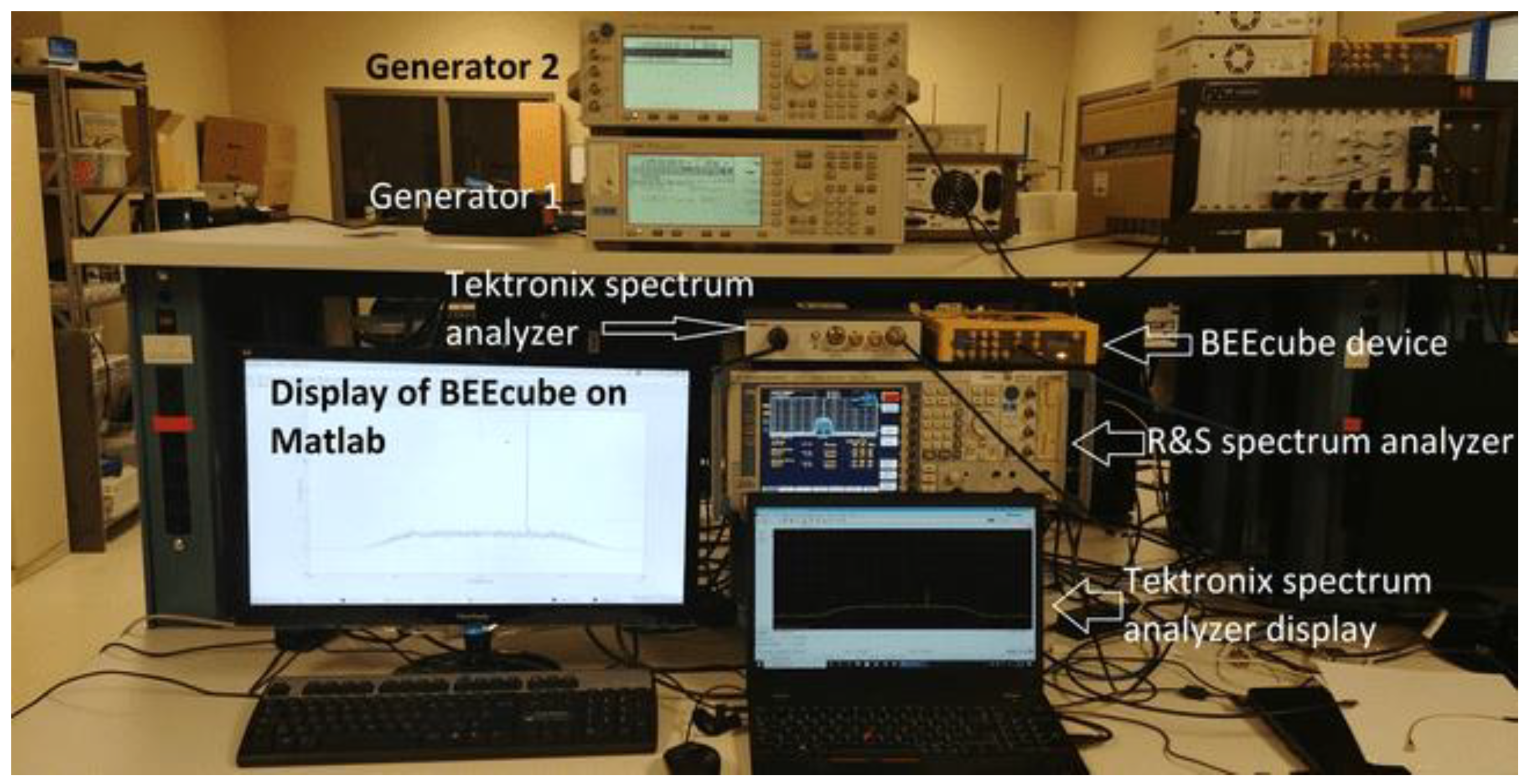
5.3. Practical Setup and Real-Time Test Bench
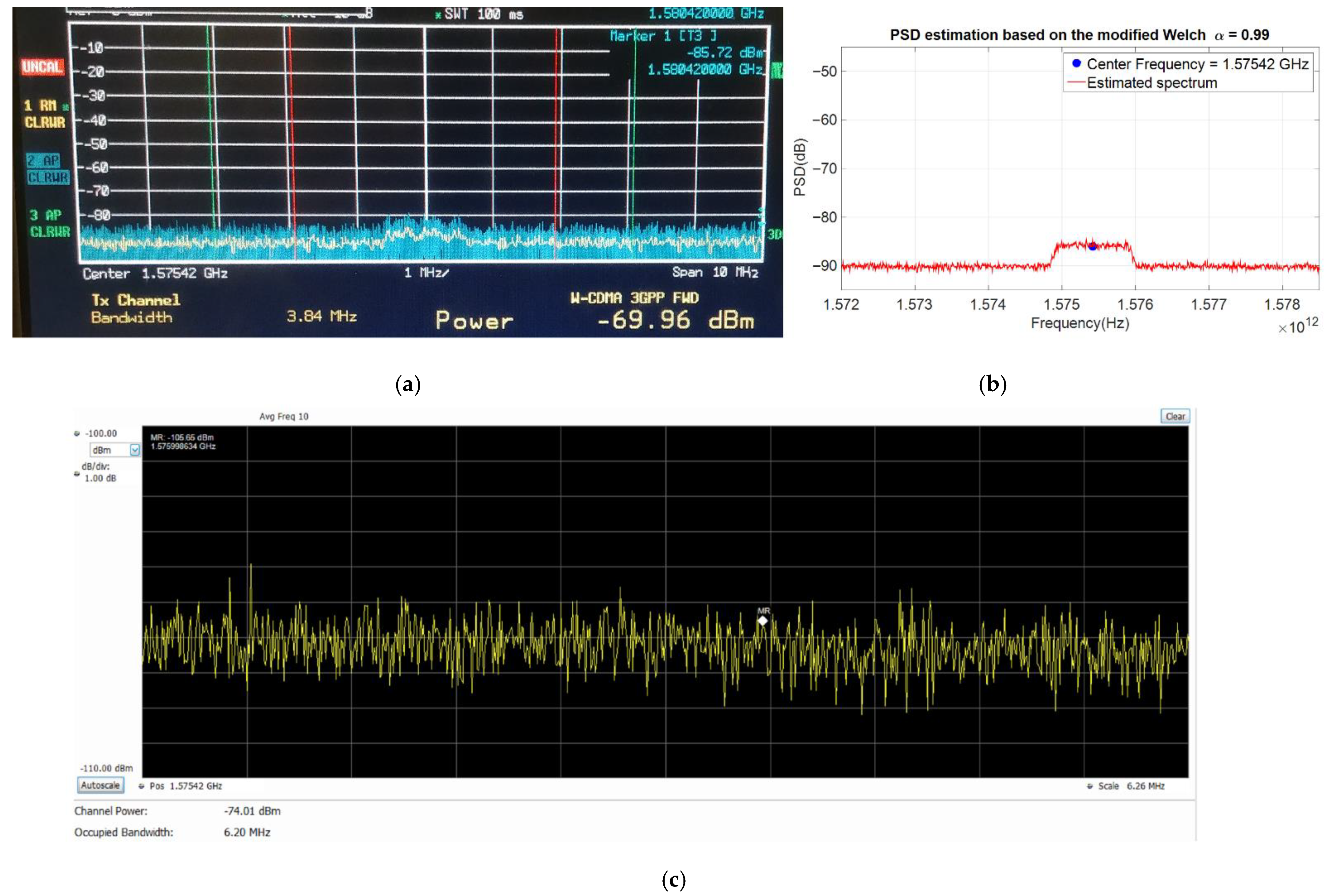
5.4. Final Results
- It should be mentioned that the power transferred by the signal generator is equally divided between all devices with the help of a splitter. Thus, all devices (SDR and two other spectrum analyzers) are competing with similar input power.
- Selected span for commercial devices is 10 MHz. The SDR that run the new design, has a sampling rate of 40 MHz, thus, the span of the SDR is equal to 20 MHz. Selected span for the two other devices is half of SDR, that allows them to have two times better resolution.
- The attenuation gain for all three devices is equal to 0 dB. It allows the two other spectrum analyzers to have maximum sensitivity to the input signal.
- Selected cables have the same attenuation gain.
- During the test, we also changed the input signal of different devices to be sure that the obtained results were real.
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, S.; Feng, L. Design and Implementation of Next Generation Signal Spectrum Monitoring for Satellite Broadcasting Television. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 1458–1461. [Google Scholar] [CrossRef]
- McCarthy, D. Modern Receiver Architectures: Considerations for spectrum monitoring applications. In Proceedings of the 2019 IEEE International Symposium on Electromagnetic Compatibility, Signal & Power Integrity (EMC+SIPI), New Orleans, LA, USA, 22–26 July 2019; pp. 18–21. [Google Scholar] [CrossRef]
- Ujan, S.; Navidi, N.; Landry, R.J. Hierarchical Classification Method for Radio Frequency Interference Recognition and Characterization in Satcom. Appl. Sci. 2020, 10, 4608. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, G.; Ding, X. Analysis of Co-channel Interference in Low-orbit Satellite Internet of Things. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 136–139. [Google Scholar] [CrossRef]
- Witte, R.A. Spectrum and Network Measurements; Scitech Publ.: Marina del Rey, CA, USA, 2014. [Google Scholar]
- Zhao, H.; Lin, G. Nonparametric and parametric methods of spectral analysis. In MATEC Web of Conferences; EDP Sciences: Paris, France, 2019. [Google Scholar]
- Xu, Q.; Duan, Z. A fixed point of DFT/FFT for FPGA platform. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; pp. 279–282. [Google Scholar] [CrossRef]
- Liavas, A.P.; Moustakides, G.V.; Henning, G.; Psarakis, E.Z.; Husar, P. A periodogram-based method for the detection of steady-state visually evoked potentials. IEEE Trans. Biomed. Eng. 1998, 45, 242–248. [Google Scholar] [CrossRef] [PubMed]
- Barbe, K.; Pintelon, R.; Schoukens, J. Welch Method Revisited: Nonparametric Power Spectrum Estimation Via Circular Overlap. IEEE Trans. Signal Process. 2010, 58, 553–565. [Google Scholar] [CrossRef]
- Krishna, A.; Andrews, J. PSD computation using modified Welch algorithm. Int. J. Sci. Res. Eng. Technol. 2015, 4, 951–954. [Google Scholar]
- Marple, L. A new autoregressive spectrum analysis algorithm. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 441–454. [Google Scholar] [CrossRef]
- Bisina, K.V.; Azeez, M.A. Optimized estimation of power spectral density. In Proceedings of the 2017 International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 15–16 June 2017; pp. 871–875. [Google Scholar] [CrossRef]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Sorensen, H.; Jones, D.; Heideman, M.; Burrus, C. Real-valued fast Fourier transform algorithms. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 849–863. [Google Scholar] [CrossRef] [Green Version]
- Hemmert, K.S.; Underwood, K.D. An analysis of the double-precision floating-point FFT on FPGAs. In Proceedings of the 13th Annual IEEE Symposium on Field-Programmable Custom Computing Machines (FCCM’05), Napa, CA, USA, 18–20 April 2005; pp. 171–180. [Google Scholar] [CrossRef]
- Garg, V.K.; Wang, Y. Data Communication Concepts. In The Electrical Engineering Handbook, 1st ed.; Elsevier: Cambridge, MA, USA, 2005; Chapter 5; pp. 983–988. [Google Scholar]
- Nussbaumer, H.J. The fast Fourier transform. In Fast Fourier Transform and Convolution Algorithms; Springer: Berlin/Heidelberg, Germany, 1981; pp. 81–111. [Google Scholar]
- Parhi, K.K.; Ayinala, M. Low-Complexity Welch Power Spectral Density Computation. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 172–182. [Google Scholar] [CrossRef]
- Zou, P.; Lv, M. A fast algorithm for blind estimation of frequency domain parameters of Direct Sequence Spread Spectrum signal. In Proceedings of the 2009 IEEE International Conference on Communications Technology and Applications, Beijing, China, 16–18 October 2009; pp. 430–435. [Google Scholar] [CrossRef]
- Varma, B.S.C.; Paul, K.; Balakrishnan, M. Accelerating 3D-FFT Using Hard Embedded Blocks in FPGAs. In Proceedings of the 2013 26th International Conference on VLSI Design and 2013 12th International Conference on Embedded Systems, Pune, India, 5–10 January 2013; pp. 92–97. [Google Scholar] [CrossRef]
- John, M.S.; Dimitrijevic, A.; Picton, T.W. Weighted averaging of steady-state responses. Clin. Neurophysiol. 2001, 112, 555–562. [Google Scholar] [CrossRef]
- Gavaskar, G.R.; Chaudhury, K.N. Fast adaptive bilateral filtering. IEEE Trans. Image Process. 2018, 28, 779–790. [Google Scholar] [CrossRef]
- Papari, G.; Idowu, N.; Varslot, T. Fast bilateral filtering for denoising large 3D images. IEEE Trans. Image Process. 2016, 26, 251–261. [Google Scholar] [CrossRef] [PubMed]
- Kovacs, Z.L. On the Enhancement of the SNR of Repetitive Signals by Digital Averaging. IEEE Trans. Instrum. Meas. 1979, 28, 152–155. [Google Scholar] [CrossRef]
- Same, M.H.; Gandubert, G.; Ivanov, P.; Landry, R.; Gleeton, G. Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard. Telecom 2020, 1, 17. [Google Scholar] [CrossRef]
- Puschel, M. Cooley-Tukey FFT like algorithms for the DCT. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, (ICASSP’03), Hong Kong, China, 6–10 April 2003; p. II-501. [Google Scholar] [CrossRef] [Green Version]
- Ujan, S.; Navidi, N.; Landry, R., Jr. An Efficient Radio Frequency Interference (RFI) Recognition and Characterization Using End-to-End Transfer Learning. Appl. Sci. 2020, 10, 6885. [Google Scholar] [CrossRef]
- Ujan, S.; Same, M.H.; Landry, R.J. A Robust Jamming Signal Classification and Detection Approach Based on Multi-Layer Perceptron Neural Network. Int. J. Res. Stud. Comput. Sci. Eng. 2020, 7, 1–12. [Google Scholar] [CrossRef]
- Rohde & Schwarz. R&S®FSQ Signal Analyzer Operating Manual; Operating Manual 1313.9681.12-02; Rohde & Schwarz: Munich, Germany, 2014. [Google Scholar]
- Tektronix. RSA600 Series Real Time Spectrum Analyzers. Available online: https://www.tek.com/spectrum-analyzer/rsa600-series (accessed on 4 September 2020).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single-Tone Center Frequency | Modulated QAM Center Frequency | Modulated QAM Bandwidth | Single-Tone Power | Modulated QAM Power | SDR Sample Rate | Parameter | FFT Size |
|---|---|---|---|---|---|---|---|
| 1.574 GHz | 1.57542 GHz | 1 MHz | −48 dBm | −65 dBm | 40 MHz | 0.99 | 2048 |
| Rohde & Schwarz | ||||
|---|---|---|---|---|
| Span | Reference level | Attenuation gain | Center frequency | Resolution bandwidth |
| 10 MHz | 0 dB | 0 dB | 1.57542 GHz | 30 kHz |
| Tektronix RSA600 | ||||
| Span | Reference level | Attenuation gain | Center frequency | Resolution bandwidth |
| 6.2 MHz | −20 dB | 0 dB | 1.57542 GHz | 1 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Same, M.H.; Gandubert, G.; Gleeton, G.; Ivanov, P.; Landry, R., Jr. Simplified Welch Algorithm for Spectrum Monitoring. Appl. Sci. 2021, 11, 86. https://doi.org/10.3390/app11010086
Same MH, Gandubert G, Gleeton G, Ivanov P, Landry R Jr. Simplified Welch Algorithm for Spectrum Monitoring. Applied Sciences. 2021; 11(1):86. https://doi.org/10.3390/app11010086
Chicago/Turabian StyleSame, Mohammad Hossein, Gabriel Gandubert, Gabriel Gleeton, Preslav Ivanov, and René Landry, Jr. 2021. "Simplified Welch Algorithm for Spectrum Monitoring" Applied Sciences 11, no. 1: 86. https://doi.org/10.3390/app11010086
APA StyleSame, M. H., Gandubert, G., Gleeton, G., Ivanov, P., & Landry, R., Jr. (2021). Simplified Welch Algorithm for Spectrum Monitoring. Applied Sciences, 11(1), 86. https://doi.org/10.3390/app11010086