
Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety



Abstract
:1. Introduction
2. Design of the Proximity Warning System (PWS) Based on Bluetooth Beacons and Smart Helmets
2.1. Design of BLE Transmission Units Using Bluetooth Beacon
2.2. Design of BLE Receiver Units Using an Arduino Board
3. Experiment of the Proximity Warning System Based on Bluetooth Beacon and Smart Helmet
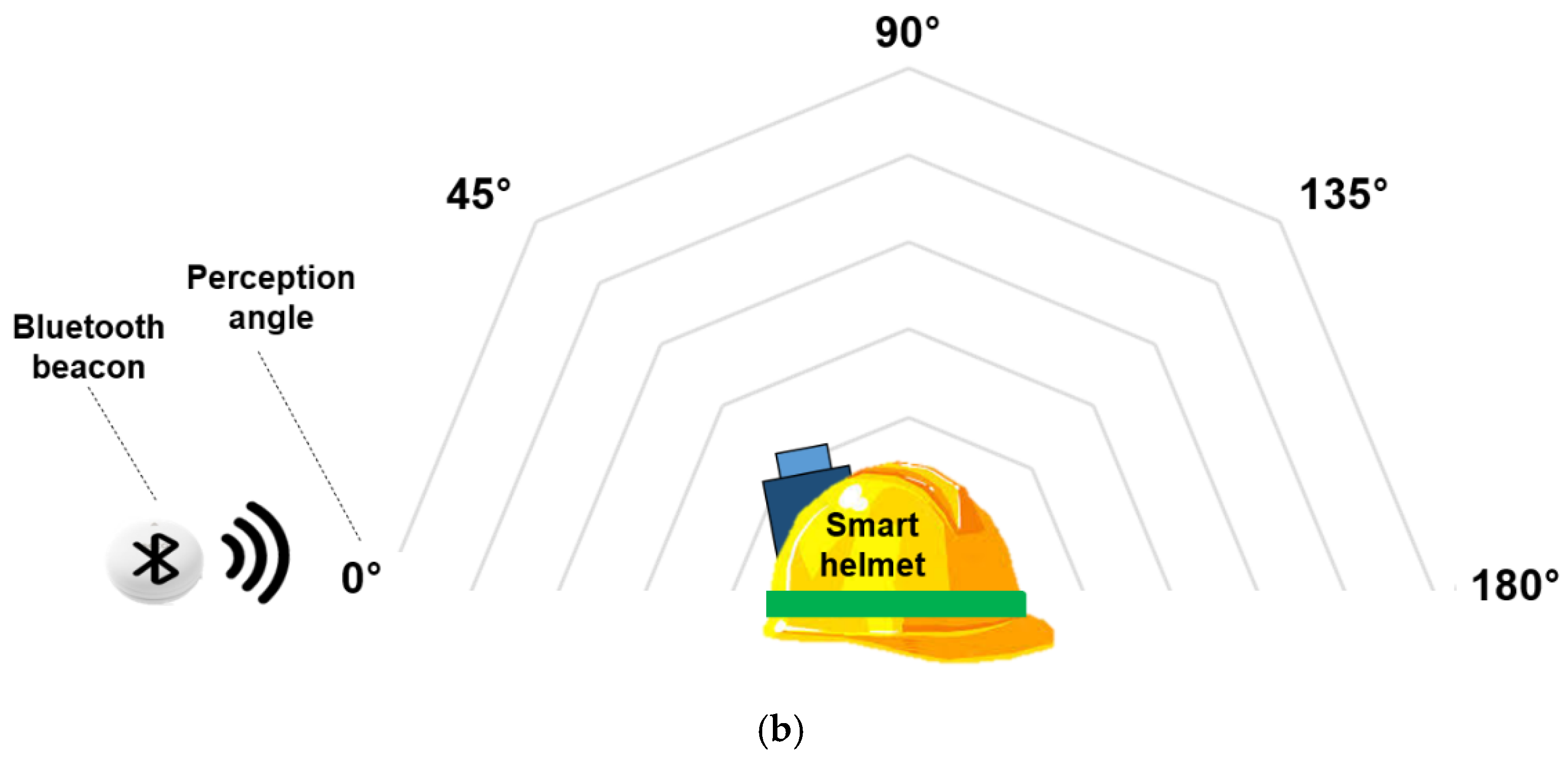
3.1. Performance Evaluation of Personal PWS Based on Smart Helmets
3.2. Subjective Workload Assessment of Smart Helmet-Based Personal PWS
- Mental demand: how many mental and cognitive skills are needed to accomplish this task?
- Physical demand: how much physical ability do you need to perform this task?
- Temporal demand: how much duress did you feel due to the rate or pace at which you performed multiple tasks?
- Overall Performance: how successfully do you think you have achieved the goals of this task?
- Effort: how much mental and physical effort was required to achieve your work goals?
- Frustration Level: how much discomfort have you felt while working on this task?
4. Results
5. Discussion
5.1. BLE Signal Propagation in Underground Mines
5.2. Advantages of Smart Helmet-Based PWS
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- U.S. Bureau of Labor Statistics. Available online: https://www.bls.gov/iif/oshcfoi1.htm (accessed on 7 April 2021).
- Department of Mines, Industry Regulation and Safety. Government of Western Australia. Available online: http://www.dmp.wa.gov.au/Documents/Safety/MSH_R_VehicleCollisions.pdf (accessed on 7 April 2021).
- Ruff, T.M. Recommendations for Evaluating and Implementing Proximity Warning Systems on Surface Mining Equipment. Available online: https://www.cdc.gov/niosh/mining/UserFiles/works/pdfs/2007-146.pdf (accessed on 7 April 2021).
- Ruff, T.M.; Hession-Kunz, D. Application of Radio-frequency Identification Systems to Collision Avoidance in Metal/nonmetal mines. IEEE Trans. Ind. Appl. 2001, 37, 112–116. [Google Scholar] [CrossRef]
- Schiffbauer, W.H. An Active Proximity Warning System for Surface and Underground Mining Applications. Miner. Eng. 2002, 54, 40–48. [Google Scholar]
- Collision Avoidance System by GE Mining. Available online: https://www.ge.com/digital/sites/default/files/download_assets/GE-Digital-Mine-Collision-Avoidance-System-datasheet.pdf (accessed on 7 April 2021).
- Proximity Detection and Collision Avoidance solution for above and below ground operations by PBE Group. Available online: https://pbegrp.com/download/proximity-alert-system-pas-a4/?wpdmdl=3533&refresh=606d8b3c255ce1617791804 (accessed on 7 April 2021).
- Proximity Detection System by Becker Mining Systems. Available online: https://www.becker-mining.com/sites/default/files/BMS-PDS-100_rev-4-web_2018-09-4.pdf (accessed on 7 April 2021).
- Collision Avoidance System (CAS) by NEWTRAX. Available online: https://newtrax.com/solution-collision-avoidance-system (accessed on 7 April 2021).
- IMPACT by Mine Site Technologies (MST). Available online: https://mstglobal.com/technologies/safety-tracking/ (accessed on 7 April 2021).
- Bluetooth SIG. Available online: https://www.bluetooth.com/learn-about-bluetooth/radio-versions/ (accessed on 7 April 2021).
- Jung, J.; Choi, Y. Measuring Transport Time of Mine Equipment in and Underground Mine Using a Bluetooth Beacon System. Minerals 2017, 7, 1. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Choi, Y. Bluetooth-Beacon-Based Underground Proximity Warning System for Preventing Collisions inside Tunnels. Appl. Sci. 2018, 8, 2271. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Choi, Y. Bluetooth Beacon-Based Mine Production Management Application to Support Ore Haulage Operations in Underground Mines. Sustainability 2021, 13, 2281. [Google Scholar] [CrossRef]
- ELOshield by ELOKON. Available online: https://www.elokon.com/en-EN/intralogistics/eloshield-proximity-detection.html (accessed on 7 April 2021).
- Joy Smartzone Proximity System. Available online: https://mining.komatsu/technology/proximity-detection/smartzone-proximity-detection (accessed on 7 April 2021).
- Smartzone Proximity System by JoyGlobal. Available online: https://mining.komatsu/docs/default-source/non-product-documents/technology/proximity-detection/smartzone-pamphlet.pdf?sfvrsn=56060a6b_46 (accessed on 7 April 2021).
- Proximity Detection for Underground Coal Mines. Available online: https://www.strataworldwide.com/sites/default/files/platform/brochure/StrataProximity-Coal-Mining-US_2018.pdf (accessed on 7 April 2021).
- Jobes, C.; Carr, J.; DuCarme, J. Evaluation of an advanced proximity detection system for continuous mining machines. Int. J. Appl. Eng. Res. 2012, 7, 649–671. [Google Scholar]
- Proximity Detection System by NAUTILUS International. Available online: http://www.nautilus-intl.com/proximity-detection/nautilus-coal-buddy-operators-proximity-detection-system-for-underground-coal-mines-operating-in-an-explosive-methane-gas-environment-class-i-div-ii/ (accessed on 7 April 2021).
- Proximity Warning System by Sensorzone. Available online: https://globalsurvey.co.nz/wp-content/uploads/2016/06/A4-Brochure-final.pdf (accessed on 7 April 2021).
- SiteZone PWS. Available online: https://proximitywarning.com/product-services/sitezone-proximity-warning-system/ (accessed on 7 April 2021).
- Hines, K.P. Exploration of Alerting Methods on Vest-Worn Systems. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 4 May 2016. [Google Scholar]
- Sakhakarmi, S.; Park, J.; Singh, A. Tactile-based wearable system for improved hazard perception of worker and equipment collision. Autom. Constr. 2021, 125, 103613. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites. Int. J. Environ. Res. Public Health 2020, 17, 1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preetham, D.A.; Rohit, M.S.; Ghontale, A.G.; Priyadarsini, M.J.P. Safety helmet with alcohol detection and theft control for bikers. In Proceedings of the 2017 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, India, 7–8 December 2017; pp. 668–673. [Google Scholar]
- Melcher, V.; Diederichs, F.; Maestre, R.; Hofmann, C.; Nacenta, J.M.; van Gent, J.; Kusić, D.; Žagar, B. Smart Vital Signs and Accident Monitoring System for Motorcyclists Embedded in Helmets and Garments for Advanced eCall Emergency Assistance and Health Analysis Monitoring. Procedia Manuf. 2015, 3, 3208–3213. [Google Scholar] [CrossRef]
- Wang, C.; Kim, Y.; Kim, D.G.; Lee, S.H.; Min, S.D. Smart Helmet and Insole Sensors for Near Fall Incidence Recognition during Descent of Stairs. Appl. Sci. 2020, 10, 2262. [Google Scholar] [CrossRef] [Green Version]
- Uniyal, M.; Rawat, H.; Srivastava, M.; Srivastava, V.K. IoT Based Smart Helmet System with Data Log System. In Proceedings of the 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Greater Noida, India, 12–13 October 2018; IEEE: Greater Noida (UP), India, 2018; pp. 28–31. [Google Scholar] [CrossRef]
- Rahman, A.; Abdurohman, M.; Putrada, A.G. Indicator Warning Refined Fuel Oil in a Motorcycle with Fuzzy Logic and Sound Navigation through Smart Helmet. In Proceedings of the 2019 International Symposium on Electronics and Smart Devices (ISESD), Badung, Indonesia, 8–9 October 2019; IEEE: Badung, Indonesia, 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Kar, S.K.; Anshuman, D.A.; Raj, H.; Singh, P.P. New design and fabrication of smart helmet. IOP Conf. Ser. Mater. Sci. Eng. 2018, 402, 012055. [Google Scholar] [CrossRef]
- Pirkl, G.; Hevesi, P.; Amarislanov, O.; Lukowicz, P. Smart Helmet for Construction Site Documentation and Work Support. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct, Heidelberg, Germany, 12–16 September 2016; ACM: Heidelberg, Germany, 2016; pp. 349–352. [Google Scholar] [CrossRef]
- Li, P.; Meziane, R.; Otis, M.J.-D.; Ezzaidi, H.; Cardou, P. A Smart Safety Helmet Using IMU and EEG Sensors for Worker Fatigue Detection. In Proceedings of the 2014 IEEE International Symposium on Robotic and Sensors Environments (ROSE) Proceedings, Timisoara, Romania, 16–18 October 2014; IEEE: Timisoara, Romania, 2014; pp. 55–60. [Google Scholar] [CrossRef]
- Shu, L.; Li, K.; Zen, J.; Li, X.; Sun, H.; Huo, Z.; Han, G. A Smart Helmet for Network Level Early Warning in Large Scale Petrochemical Plants. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks-IPSN ’15, Seattle, WA, USA, 14–16 April 2015; ACM Press: Seattle, WA, USA, 2015; pp. 390–391. [Google Scholar] [CrossRef]
- Qiang, C.; Sun, J.-P.; Zhe, Z.; Fan, Z. ZigBee Based Intelligent Helmet for Coal Miners. In Proceedings of the 2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; IEEE: Los Angeles, CA, USA, 2009; pp. 433–435. [Google Scholar] [CrossRef]
- Shabina, S. Smart Helmet Using RF and WSN Technology for Underground Mines Safety. In Proceedings of the 2014 International Conference on Intelligent Computing Applications, Coimbatore, India, 6–7 March 2014; IEEE: Coimbatore, India, 2014; pp. 305–309. [Google Scholar] [CrossRef]
- Behr, C.J.; Kumar, A.; Hancke, G.P. A Smart Helmet for Air Quality and Hazardous Event Detection for the Mining Industry. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016; IEEE: Taipei, Taiwan, 2016; pp. 2026–2031. [Google Scholar] [CrossRef]
- Hazarika, P. Implementation of Smart Safety Helmet for Coal Mine Workers. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; IEEE: Delhi, India, 2016; pp. 1–3. [Google Scholar] [CrossRef]
- Sharma, M.; Maity, T. Low Cost Low Power Smart Helmet for Real-Time Remote Underground Mine Environment Monitoring. Wireless Pers. Commun. 2018, 102, 149–162. [Google Scholar] [CrossRef]
- Revindran, R.; Vijayaraghavan, H.; Huang, M.-Y. Smart Helmets for Safety in Mining Industry. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; IEEE: Bangalore, India, 2018; pp. 217–221. [Google Scholar] [CrossRef]
- Eldemerdash, T.; Abdulla, R.; Jayapal, V.; Nataraj, C.; Abbas, K. IoT Based Smart Helmet for Mining Industry Application. Int. J. Adv. Sci. Technol. 2020, 29, 373–387. [Google Scholar]
- Sanjay, B.S.; Dilip, K.A.; Balasaheb, T.A.; KinnuKumar, S.; Saware, N.P. Smart Helmet Using ZigBee. Int. J. Innov. Res. Technol. 2019, 6, 144–148. [Google Scholar]
- Charde, A. A Smart and Secured Helmet for Coal Mining Workers. Int. J. Res. Appl. Sci. Eng. Technol. 2020, 8, 673–675. [Google Scholar] [CrossRef]
- Sujitha, S.; Loret, J.B.S.; Gethsy, D.M. Iot Based Smart Mine Safety System Using Arduino. Int. J. Comput. Sci. Mob. Comput. 2020, 9, 141–145. [Google Scholar]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Baek, J.; Suh, J.; Choi, Y. Analysis of Received Signal Strength Index from Bluetooth Beacons to Develop Proximity Warning Systems for Underground Mines. J. Korean Soc. Miner. Energy Resour. Eng. 2018, 55, 604–613. [Google Scholar] [CrossRef]
- RECO Beacon. Available online: http://reco2.me/ (accessed on 7 April 2021).
- Arduino. Available online: https://www.arduino.cc (accessed on 7 April 2021).
- Arduino UNO Board Specification. Available online: https://store.arduino.cc/usa/arduino-uno-rev3 (accessed on 7 April 2021).
- Bluetooth Module Specification. Available online: http://www.firmtech.co.kr/default/product/bluetooth/fbl780bc.php#01 (accessed on 7 April 2021).
- Cain, B. A Review of the Mental Workload Literature; Defence Research and Development Toronto (Canada): Toronto, ON, Canada, 2007; pp. 1–35. [Google Scholar]
- Richer, G.; Gruber, H.; Friesenbichler, H.; Uscilowsk, A.; Jancurova, L.; Konova, D. Mental Workload: Identification and Evaluation of Hazards; Taking Measures. In Guide for Risk Assessment in Small and Medium Enterprises; The International Social Security Association (ISSA): Genova, Switzerland, 2008; pp. 1–25. [Google Scholar]
- Rubio, S.; Díaz, E.; Martín, J.; Puente, J.M. Evaluation of Subjective Mental Workload: A Comparison of SWAT, NASA-TLX, and Workload Profile Methods. Appl. Psychol. Int. Rev. 2004, 53, 61–86. [Google Scholar] [CrossRef]
- Reid, G.B.; Nygren, T.E. The subjective workload assessment technique: A scaling procedure for measuring mental workload. Adv. Psychol. 1988, 52, 185–218. [Google Scholar] [CrossRef]
- Tsang, P.S.; Velazquez, V.L. Diagnosticity and multidimensional subjective workload ratings. Ergonomics 1996, 39, 358–381. [Google Scholar] [CrossRef] [PubMed]
- NASA Task Load Index (TLX) v.1.0 Paper and Pencil Package. Available online: https://humansystems.arc.nasa.gov/groups/tlx/downloads/TLX_pappen_manual.pdf (accessed on 7 April 2021).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | |
|---|---|---|
| Dimensions (Diameter × Height) | 45 mm × 20 mm | |
| Weight | 11.6 g (0.4 oz) | |
| Processor | 32-bit ARM® Cortex®-M0 | |
| Battery | CR2450 Lithium Coin Battery (3 V, 620 mAh) | |
| Casing | Acrylonitrile Butadiene Styrene (ABS) Plastic | |
| Chipset | Nordic nrf51822 | |
| Thermal Resistance | 93 °C (200 °F) | |
| Operating Temperature | −10–60 °C (14–140 °F) | |
| Wireless Technology | Bluetooth 4.0 (i.e., BLE or Bluetooth® Smart) | |
| Signal range | 1 m~70 m (3.2 ft~230 ft) | |
| Signal transmission period | Min (10 ms), Max (2 s) | |
| Transmission power | Min (−16 dBm), Max (4 dBm) | |
| Certification | South Korea | Korea Certification (KC) Federal Communication Commission (FCC) Conformité Européene (CE) marking Ministry of Internal Affairs and Communications (MIC) of Japan |
| USA | ||
| Europe | ||
| Japan | ||
| Item | Value |
|---|---|
| Model | Arduino Uno R3 |
| Microcontroller | ATmega328P |
| Length | 68.6 mm |
| Width | 53.4 mm |
| Weight | 25 g |
| Operating Voltage | 5 V |
| Input Voltage | 7–12 V (recommended), 6–20 V (limit) |
| Digital I/O Pins | 14 (of which 6 provide PWM output) |
| PWM Digital I/O Pins | 6 |
| Analog Input Pins | 6 |
| DC Current per I/O Pin | 20 mA |
| DC Current for 3.3V Pin | 50 mA |
| Flash Memory | 32 KB (ATmega328P) of which 0.5 KB used by bootloader |
| SRAM | 2 KB (ATmega328P) |
| EEPROM | 1 KB (ATmega328P) |
| Clock Speed | 16 MHz |
| LED_BUILTIN | 13 |
| Item | Value |
|---|---|
| Model | FBL780BC |
| Bluetooth specification | Bluetooth4.1Low Energy Support |
| Communication distance | 10 m |
| Frequency range | 2402~2480 MHz ISM Band |
| Sensitivity | −94 dBm |
| Transmit power | 2 dBm (−3 dBm: Actual value after matching) |
| Size | 15.5 mm × 18.5 mm |
| Input power | 3.3 V |
| Current consumption | Peripheral: 3 mA (Max), Central: 21 mA (Max: Scanning) |
| Operating temperature | Min: −10 °C, Max: 50 °C |
| Communication speed | 2400 bps~230,400 bps |
| Antenna | Chip Antenna |
| Interface | UART |
| BLE Signal Recognition Distance (m) | Signal Transmission Strength of Bluetooth Beacon | ||||
|---|---|---|---|---|---|
| −12 dBm | −8 dBm | −4 dBm | 0 dBm | 4 dBm | |
| Mean | 2.9 | 6.0 | 27.1 | 62.7 | 66.9 |
| STD 1 | 1.4 | 3.8 | 3.0 | 11.5 | 8.7 |
| Max 2 | 6.0 | 12.0 | 30.0 | 74.0 | 79.0 |
| Min 3 | 1.0 | 3.0 | 22.0 | 35.0 | 50.0 |
| BLE Signal Recognition Distance (m) | Facing Angle between the Smart Helmet and the Bluetooth Beacon (Degree) | ||||
|---|---|---|---|---|---|
| 0° | 45° | 90° | 135° | 180° | |
| Mean | 27.1 | 25.1 | 22.8 | 19.4 | 10.0 |
| STD 1 | 3.0 | 4.7 | 6.6 | 5.9 | 4.3 |
| Max 2 | 30.0 | 30.0 | 31.0 | 29.0 | 15.0 |
| Min 3 | 22.0 | 18.0 | 9.0 | 13.0 | 4.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Baek, J.; Choi, Y. Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety. Appl. Sci. 2021, 11, 4342. https://doi.org/10.3390/app11104342
Kim Y, Baek J, Choi Y. Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety. Applied Sciences. 2021; 11(10):4342. https://doi.org/10.3390/app11104342
Chicago/Turabian StyleKim, Yeanjae, Jieun Baek, and Yosoon Choi. 2021. "Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety" Applied Sciences 11, no. 10: 4342. https://doi.org/10.3390/app11104342
APA StyleKim, Y., Baek, J., & Choi, Y. (2021). Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety. Applied Sciences, 11(10), 4342. https://doi.org/10.3390/app11104342