
The UWB Radar Application in the Aviation Security Systems

 , ,
, ,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Localization of the Target by the Straight-Line Method for Two Independent Radar Sets
- −
- The use of a periodic binary signal reduces non-linear distortion (spectral bias error);
- −
- Allows linear averaging to reduce (suppress) noise;
- −
- The sequence M has a low crest factor, which allows using limited dynamics of the real system;
- −
- Signal acquisition can be performed by sampling;
- −
- Signal sampling can be performed by commercial A/D converters in combination with sampling gates (switches).
- −
- High resolution and accuracy of distance measurement
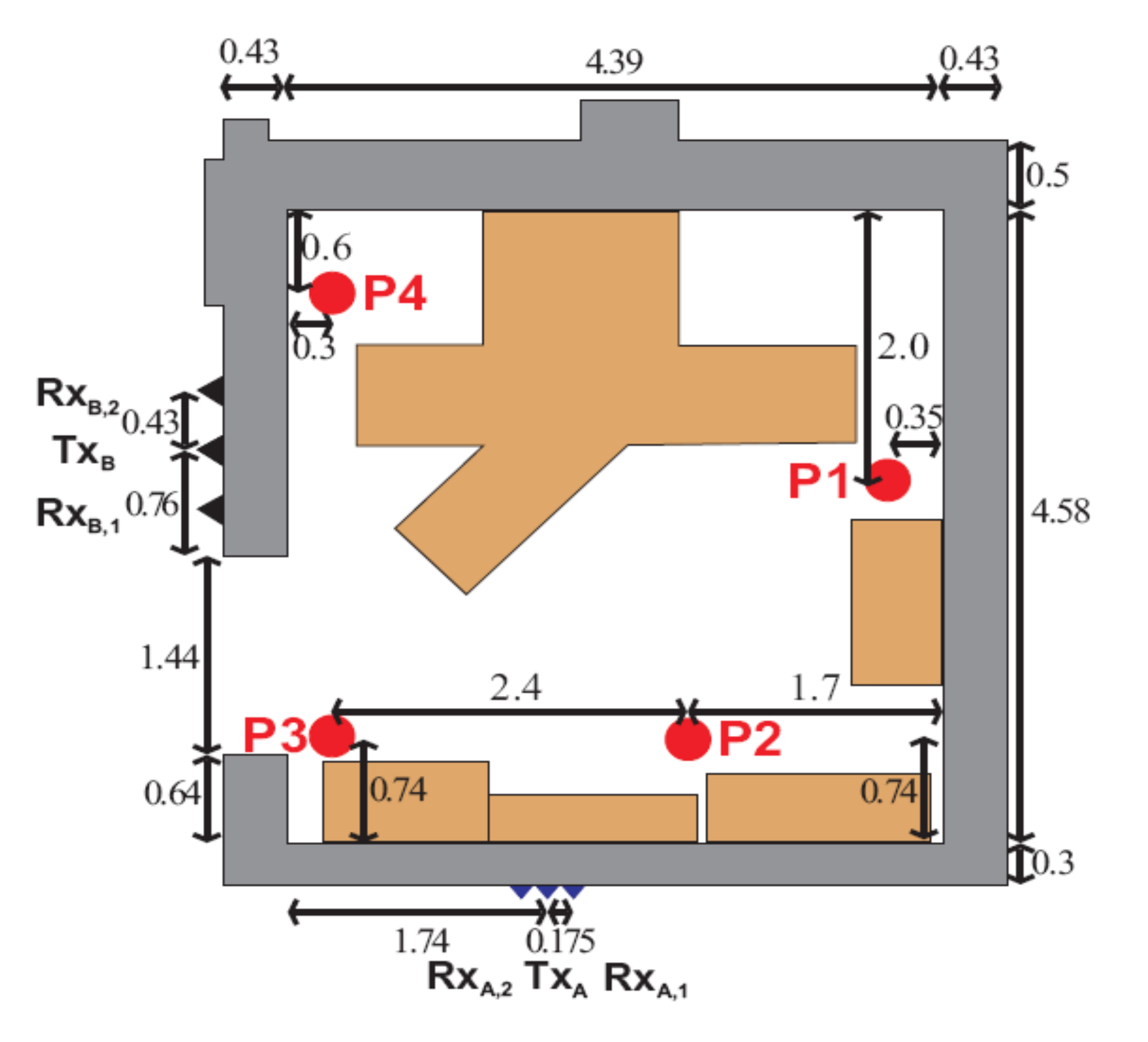
2.1.1. Description of the Place of the Experiment and the Target Movement
2.1.2. Pre-Processing of the UWB Radar Signal
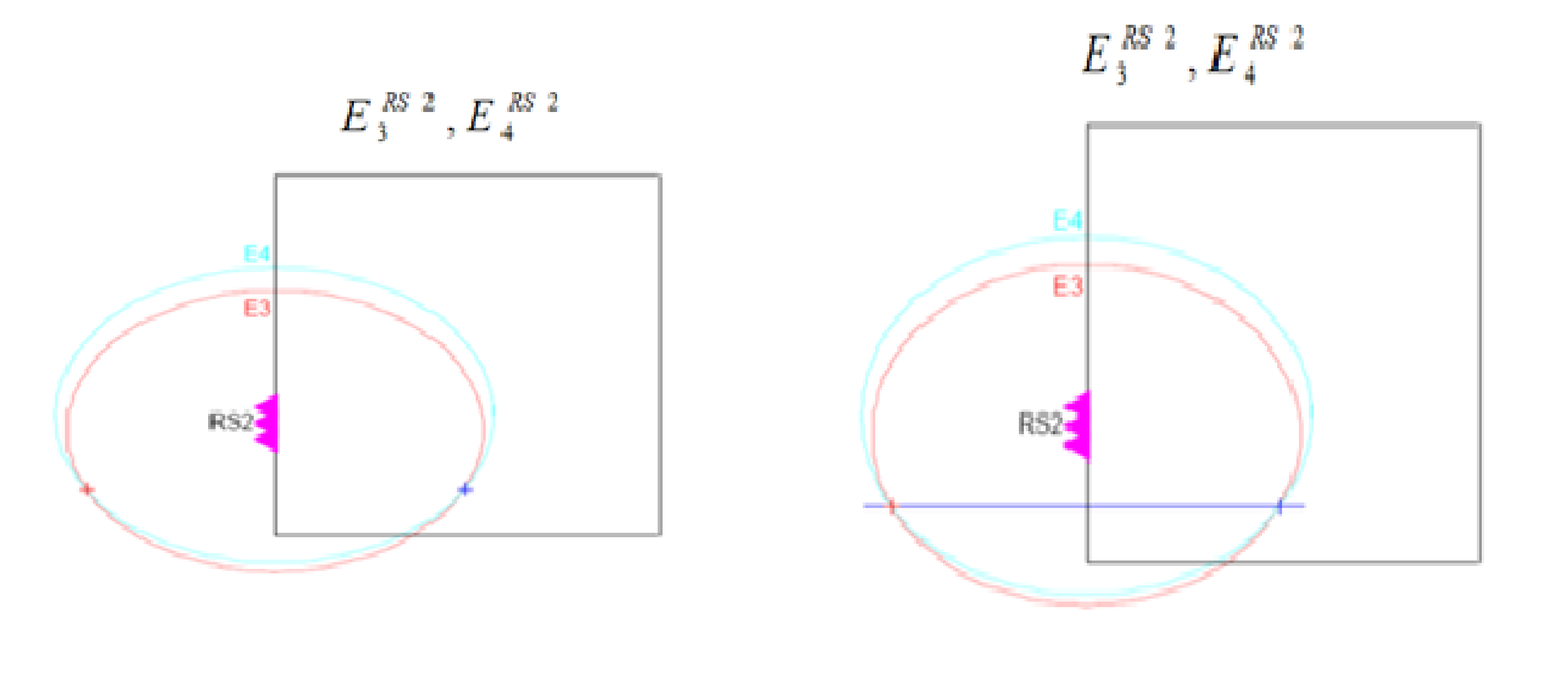
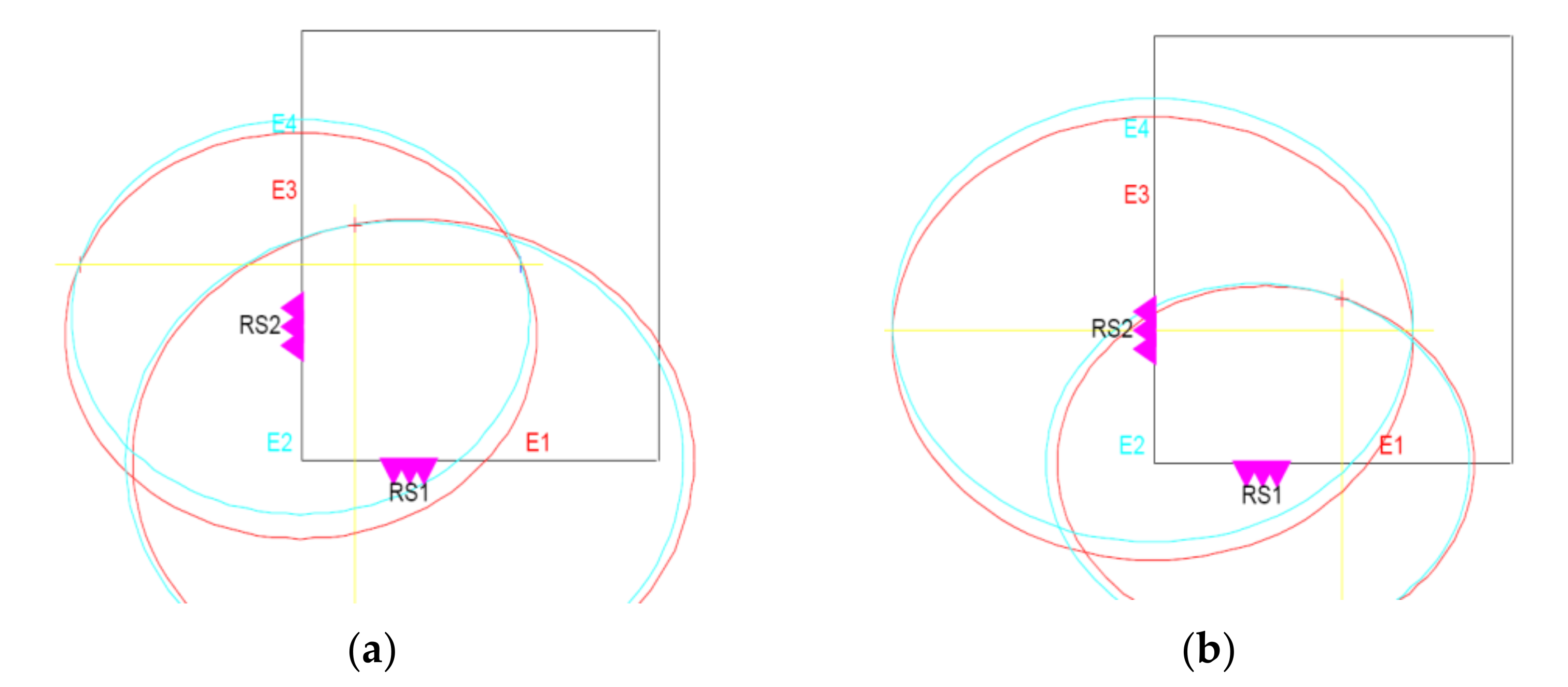
2.1.3. Principle of the Straight-Line Method
2.1.4. Application Procedure for the Straight-Line Method Usage
Algorithm for Determining the Intersections of Ellipses Using the Bézout Theorem
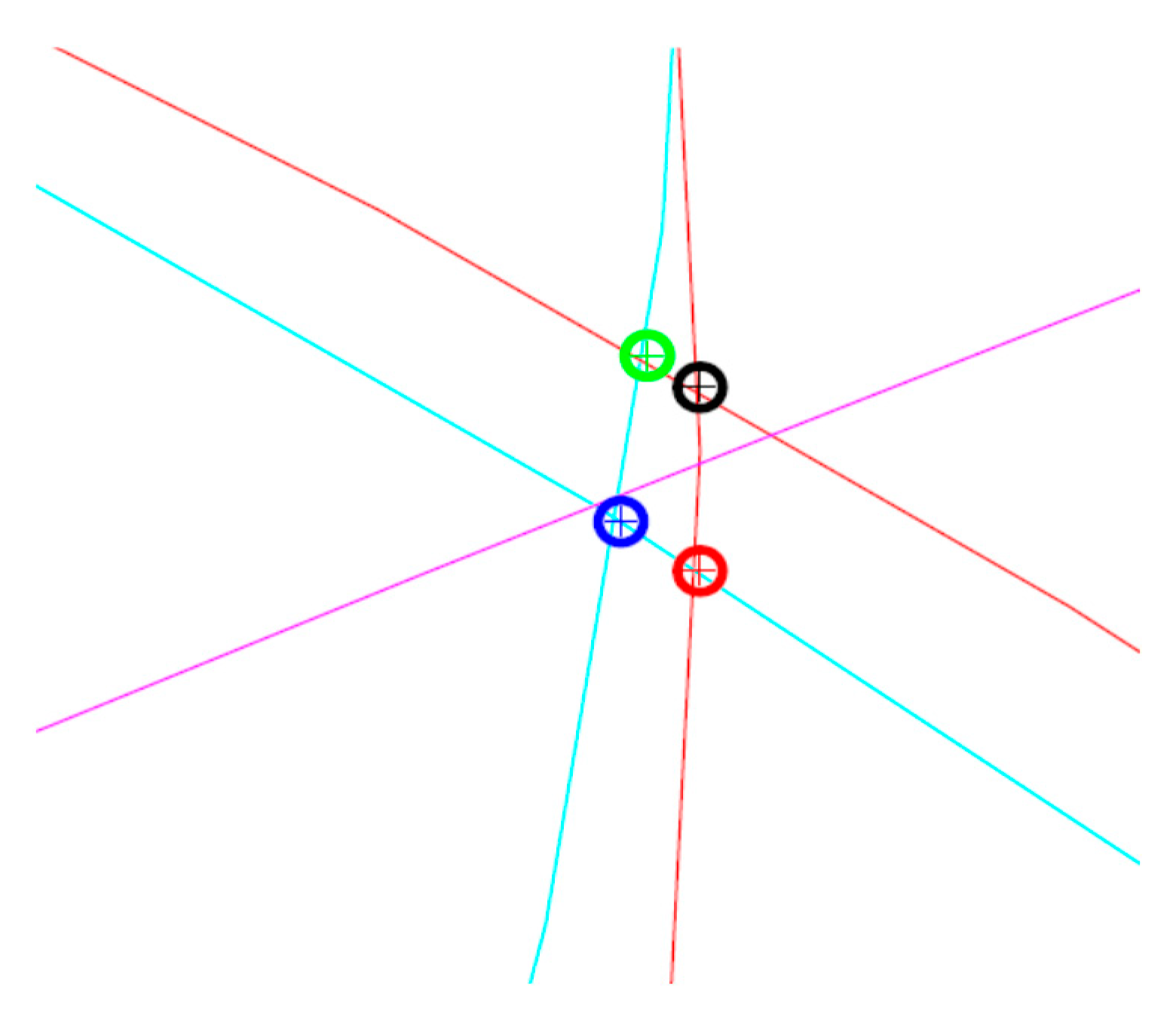
Creating an Optimal Line
Calculation of the Center of Gravity of the Real Intersections of Ellipses
3. Results
Results of the Application of the Straight-Line Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- IATA, PROGRAMS, Aviation Security. 2021. Available online: https://www.iata.org/en/programs/security/ (accessed on 20 April 2021).
- Sachs, J. Ultra-wideband sensing: The road to new radar applications. In 11-th International Radar Symposium; IEEE: Piscataway, NY, USA, 2010; pp. 1–4. [Google Scholar]
- Silva, B.; Pang, Z.; Åkerberg, J.; Neander, J.; Hancke, G. Experimental study of UWB-based high precision localization for industrial applications. In 2014 IEEE International Conference on Ultra-WideBand (ICUWB); IEEE: New York, NY, USA, 2014; pp. 280–285. [Google Scholar] [CrossRef]
- Sachs, J.; Badstubner, A.; Bonitz, F.; Eidner, M.; Helbig, M.; Herrmann, R.; Kmec, M.; Rauschenbach, P.; Solas, H. High resolution non-destructive testing in civil engineering by ultra-wideband pseudo-noise approaches. In 2008 IEEE International Conference on Ultra-Wideband; IEEE: New York, NY, USA, 2008; pp. 137–140. [Google Scholar] [CrossRef]
- Iyer, B.; Pathak, N.P. Multiband Non-Invasive Microwave Sensor: Design and Analysis; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Galajda, P.; Pecovsky, M.; Gazda, J.; Drutarovsky, M. Novel M-sequence UWB sensor for ground penetrating radar application. In 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP); IEEE: New York, NY, USA, 2018; pp. 110–111. [Google Scholar]
- Johansson, E.M.; Mast, J.E. Three-dimensional ground-penetrating radar imaging using synthetic aperture time-domain focusing. In Advanced Microwave and Millimeter-Wave Detectors; International Society for Optics a Photonics: Washington, DC, USA, 1994; Volume 2275, pp. 205–214. [Google Scholar]
- Amin, M.G. Through-the-Wall Radar Imaging; CRC Press: Boca Raton, FL, USA, 2010; 604p, ISBN 9781439814765. [Google Scholar]
- Kocur, D.; Novák, D.; Švecová, M. Multiple Person Localization Based on Their Vital Sign Detection Using UWB Sensor. In Microwave Systems and Applications; Goudos, S.K., Ed.; InTech: London, UK, 2017; pp. 399–422. [Google Scholar]
- Slovák, S.; Galajda, P.; Švecová, M.; Pečovský, M.; Kmec, M. Ultra-wideband wireless sensors for robot vision in industrial environments. In 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL); IEEE: New York, NY, USA, 2017; pp. 1697–1702. [Google Scholar]
- Staderini, E.M. UWB radars in medicine. In IEEE Aerospace and Electronic Systems Magazine; IEEE: New York, NY, USA, 2002; Volume 17, pp. 13–18. [Google Scholar]
- Higashikaturagi, K.; Nakahata, Y.; Matsunami, I.; Kajiwara, A. Non-invasive respiration monitoring sensor using UWB-IR. In Ultra-Wideband, 2008. ICUWB 2008; IEEE: New York, NY, USA, 2008; Volume 1, pp. 101–104. [Google Scholar]
- Ali, M.S.; Shoumy, N.; Khatun, S.; Kamarudin, L.; Vijayasarveswari, V. Noninvasive blood glucose measurement performance analysis through UWB imaging. In 2016 3rd International Conference on Electronic Design (ICED); IEEE: New York, NY, USA, 2016; pp. 513–516. [Google Scholar]
- Qian, Z.; Wang, T.; Chen, J. Compatibility Studies of IMT System and Automotive Radar in the Frequency Range 24.5-25.5 GHz. In 2018 IEEE 18th International Conference on Communication Technology (ICCT); IEEE: New York, NY, USA, 2018; pp. 505–508. [Google Scholar]
- Kocur, D.; Švecová, M. Signal Processing for Monitoring of Static Persons Using UWB Sensors: A Survey. In IEEE MTT-S International Microwave Biomedical Conference 2019; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2019; pp. 1–3. ISBN 978-1-5386-7396-6. [Google Scholar]
- Kocur, D. UWB Technology and its Applications, 1st ed.; IntechOpen: London, UK, 2019; 92p, ISBN 978-1-7898-5716-0. ISSN 2193-9411. [Google Scholar]
- Galajda, P.; Svecova, M.; Drutarovsky, M.; Slovak, S.; Pecovsky, M.; Sokol, M.; Kocur, D. Wireless UWB Sensor System for Robot Gripper Monitoring in Non-cooperative Environments. In Recent Advances in Intelligent Engineering. 14. Topics in Intelligent Engineering and Informatics: Volume Dedicated to Imre J. Rudas’ Seventieth Birthday; Springer: Cham, Switzerland, 2020; pp. 177–207. ISBN 978-3-030-14349-7. ISSN 2193-9411. [Google Scholar]
- Kocur, D.; Fortes, J.; Švecová, M. Multiple moving person tracking by UWB sensors: The effect of mutual shielding persons and methods reducing its impacts. Eurasip J. Wirel. Commun. Netw. 2017, 2017, 1–15. [Google Scholar]
- Kocur, D.; Novák, D.; Švecová, M. UWB radar signal processing for localization of persons with the changing nature of their movement. Sens. Transducers Sens. Electron. Instrum. 2016, 207, 50–57. [Google Scholar]
- Kocur, D.; Svecova, M. Time of Arrival Complementing Method for Cooperative Localization of a Target by Two-Node UWB Sensor Network. Radioengineering 2016, 25, 602–611. [Google Scholar]
- Mokhtari, G.; Zhang, Q.; Hargrave, C.; Ralston, J.C. Non-Wearable UWB Sensor for Human Identification in Smart Home. IEEE Sens. J. 2017, 17, 3332–3340. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.; Salcic, Z. A Low-Cost INS and UWB Fusion Pedestrian Tracking System. IEEE Sens. J. 2019, 19, 3733–3740. [Google Scholar] [CrossRef]
- Hu, Z.; Zeng, Z.; Wang, K.; Feng, W.; Zhang, J.; Lu, Q.; Kang, X. Design and Analysis of a UWB MIMO Radar System with Miniaturized Vivaldi Antenna for Through-Wall Imaging. Remote Sens. 2019, 11, 1867. [Google Scholar] [CrossRef] [Green Version]
- Pan, J.; Ye, S.; Shi, C.; Yan, K.; Liu, X.; Ni, Z.; Yang, G.; Fang, G. 3D imaging of moving targets for ultra-wideband MIMO through-wall radar system. In IET Radar, Sonar & Navigation; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Cséfalvay, Z.; Džunda, M. Ultra-wide band radar signal processing. In Proceedings of the ICMT 2013: International Conference on Military Technologies, Brno, Czech Republic, 22–23 May 2013; University of Defence: Brno, Czech Republic, 2013; pp. 1–7, ISBN 978-80-7231-918-3.3. [Google Scholar]
- Džunda, M.; Cséfalvay, Z.; Kotianová, N. Selected aspects of applying UWB (Ultra Wide Band) technology in transportation. In Informatics, Networking and Intelligent Computing; CRC Press/Balkema: Leiden, The Netherlands, 2015; pp. 177–181. ISBN 978-1-138-02678-0. [Google Scholar]
- Džunda, M.; Cséfalvay, Z. Selected metods of ultra-wide radar signal processing. In Advances in Marine Navigation: Marine Navigation and Safety of Sea Transportation; Taylor & Francis Group: London, UK, 2013; pp. 239–242. ISBN 978-1-138-00106-0. [Google Scholar]
- Džunda, M.; Cséfalvay, Z.; Kotianová, N. Target Localization by Method of Intersections of the Ellipses Using two UWB Radar Systems. In International Conference on Advanced Educational Technology and Information Engineering; Destech publications: Lancaster, PA, USA, 2015; pp. 697–706. ISBN 978-1-60595-245-1. [Google Scholar]
- Cséfalvay, Z. UWB Radar Applications in Safety Systems. Ph.D. Thesis, TUKE, Kosice, Slovakia, 2013. [Google Scholar]
- Fontana, R.J.; Foster, L.A.; Fair, B.; Wu, D. Recent Advances in Ultra Wideband Radar and Ranging. In Proc of the IEEE International Conference on Ultra –Wideband. Systems; IEEE: New York, NY, USA, 2007. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; IEE Radar, Sonar, Navigation and Avionics Series; The Institution of Electrical Engineers: London, UK, 2004; 726p, ISBN 9780863413605. [Google Scholar]
- Rovňáková, J.; Švecová, M.; Kocur, D.; Nguyen, T.T.; Sachs, J. Signal processing for through wall moving target tracking by M sequence UWB radar. Int. Conf. Radioelektron. 2008, 18, 65–68. [Google Scholar]
- Gezici, S. A Survey on Wireless Position Estimation. Wirel. Pers. Commun. Int. J. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Švecová, M. Node Localization in UWB Wireless Sensor Networks. Ph. D. Thesis to the Dissertation Examination, Department of Electronics and Multimedia Communications, Technical University of Kosice, Kosice, Slovak Republic, December 2007. [Google Scholar]
- Piccardi, M. Background subtraction techniques: A review. In Proceedings IEEE International Conference on Systems, Man and Cybernetics; IEEE: New York, NY, USA, 2004; pp. 3099–3104. [Google Scholar]
- Fan, Q.; Sun, B.; Sun, Y.; Zhuang, X. Performance Enhancement of MEMS-Based INS/UWB Integrtion for Indoor Navigation Applications. IEEE Sens. J. 2017, 17, 3116–3130. [Google Scholar] [CrossRef]
- Eberly, D. Intersection of Ellipses; Geometric Tools, LLC: Melville, NY, USA, 2011. [Google Scholar]
- Škrášek, J.; Tichý, Z. Základy Aplikované Matematiky I, II, III; SNTL: Praha, Czech Republic, 1983. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Džunda, M.; Dzurovčin, P.; Kaľavský, P.; Korba, P.; Cséfalvay, Z.; Hovanec, M. The UWB Radar Application in the Aviation Security Systems. Appl. Sci. 2021, 11, 4556. https://doi.org/10.3390/app11104556
Džunda M, Dzurovčin P, Kaľavský P, Korba P, Cséfalvay Z, Hovanec M. The UWB Radar Application in the Aviation Security Systems. Applied Sciences. 2021; 11(10):4556. https://doi.org/10.3390/app11104556
Chicago/Turabian StyleDžunda, Milan, Peter Dzurovčin, Peter Kaľavský, Peter Korba, Zoltán Cséfalvay, and Michal Hovanec. 2021. "The UWB Radar Application in the Aviation Security Systems" Applied Sciences 11, no. 10: 4556. https://doi.org/10.3390/app11104556
APA StyleDžunda, M., Dzurovčin, P., Kaľavský, P., Korba, P., Cséfalvay, Z., & Hovanec, M. (2021). The UWB Radar Application in the Aviation Security Systems. Applied Sciences, 11(10), 4556. https://doi.org/10.3390/app11104556