
An Advanced AFWMF Model for Identifying High Random-Valued Impulse Noise for Image Processing




Abstract
:1. Introduction
2. Related Work
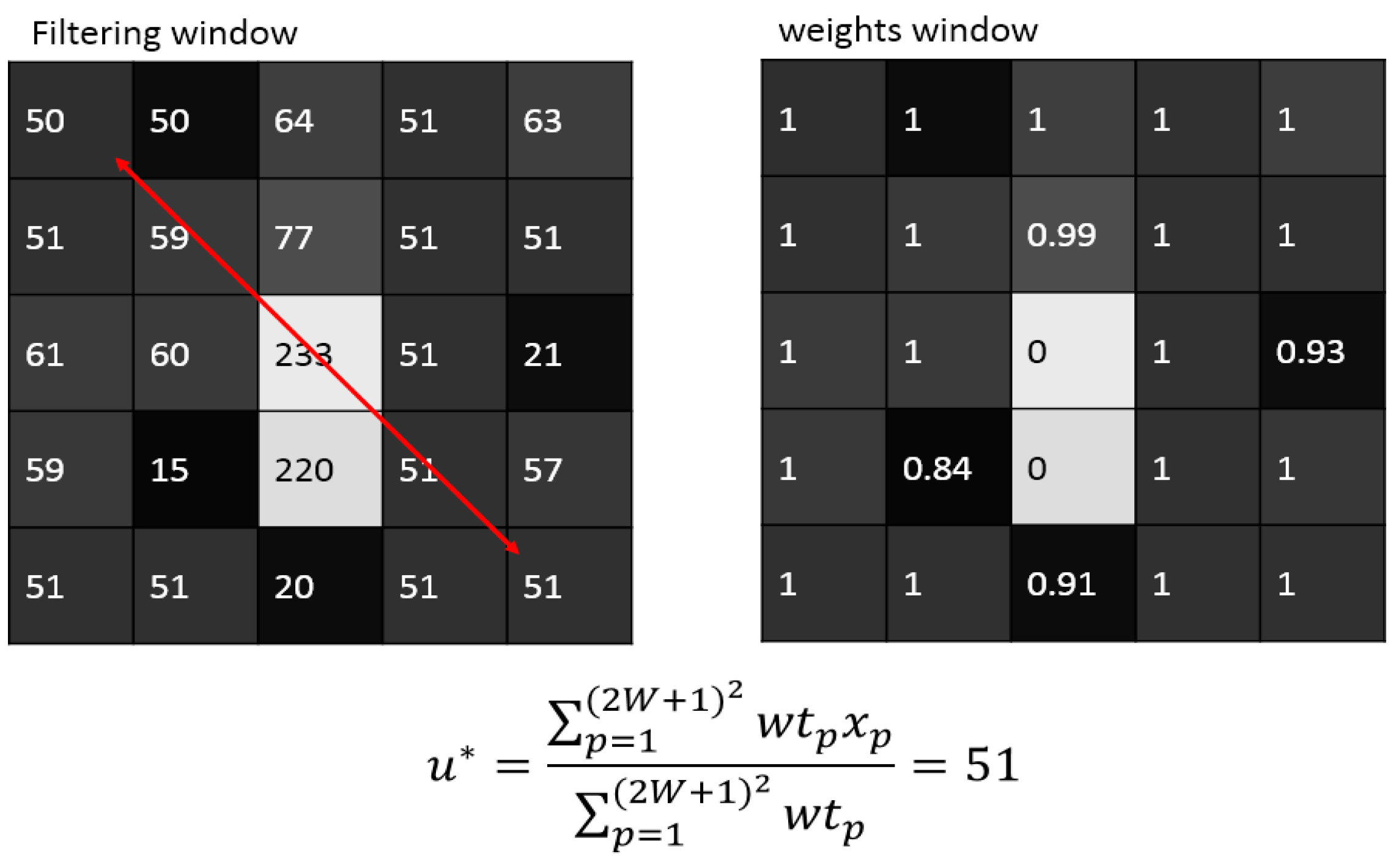
2.1. Filtering Window and Tag Window
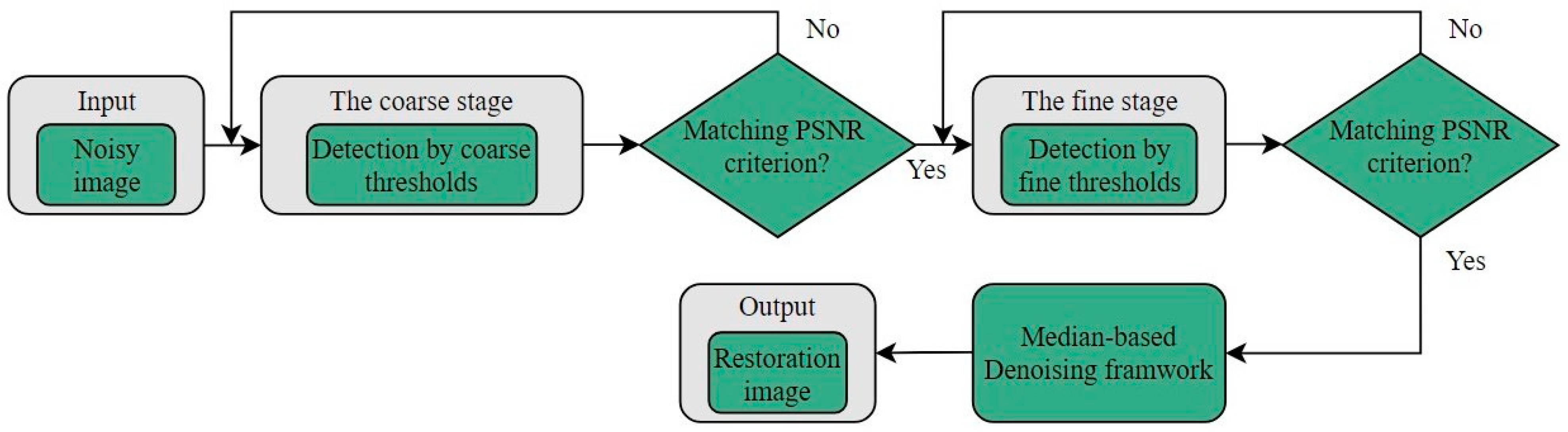
2.2. Robust Outlyingness Ratio
- Coarse stage:
- 1.
- Let us consider parameters and as coarse thresholds. We initialized all of them with zeros in the tag matrix.
- 2.
- For every pixel in the image, we found its ROR; if it ranged in the fourth level, as shown in Table 1, then that pixel was noise-free. We set the tag to 1; else, we found the relative divergence d among the filtering window’s median and active pixels. Then, based on the ROR value of d, we compared it to . We checked whether it was noisy or noise-free. We checked if d was bigger than . According to the r, we updated the tag matrix.
- 3.
- If , then we repeated Step 2; else, this stage was completed.
- Fine stage:
- 1.
- Let us consider parameters as fine thresholds. We initialized all of them with zeros in the tag matrix.
- 2.
- For every pixel in the image, we found its ROR; if it ranged in fourth level, as shown in Table 1, then that pixel was noise-free. We set the tag to 1, or else found the relative divergence d among the filtering window’s median and active pixel. Then, based on the ROR value of d, we compared it to . We checked whether it was noisy or noise-free. We checked if d was bigger than . According to the r, we updated the tag matrix. Similarly, we calculated the values for all the pixels.
- 3.
- If , then we repeated Step 2; else, this stage was completed.
2.3. Sparsity Ranking
2.4. Noise Model
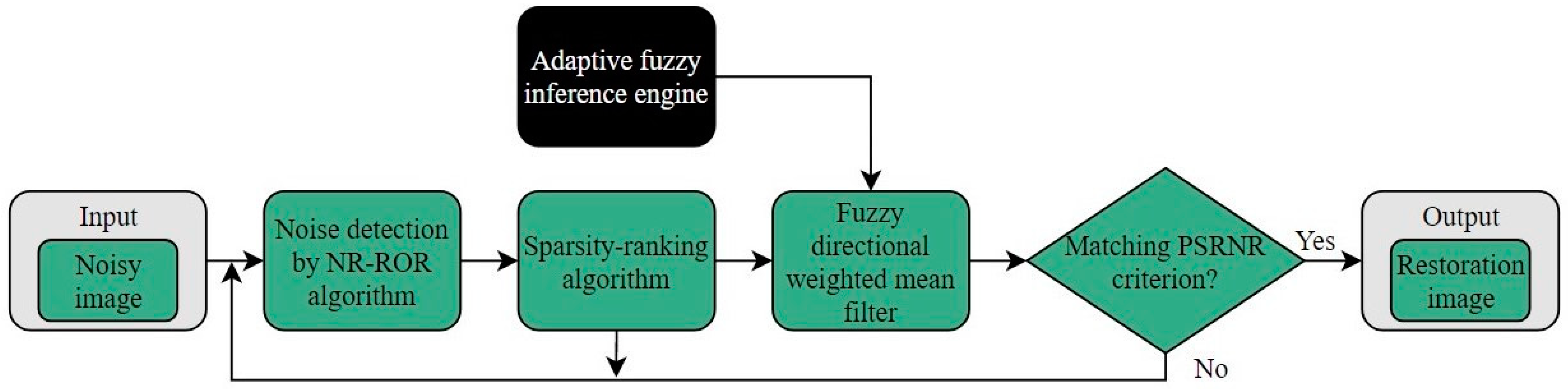
3. The Proposed Adaptive Fuzzy Weighted Mean Filter Model
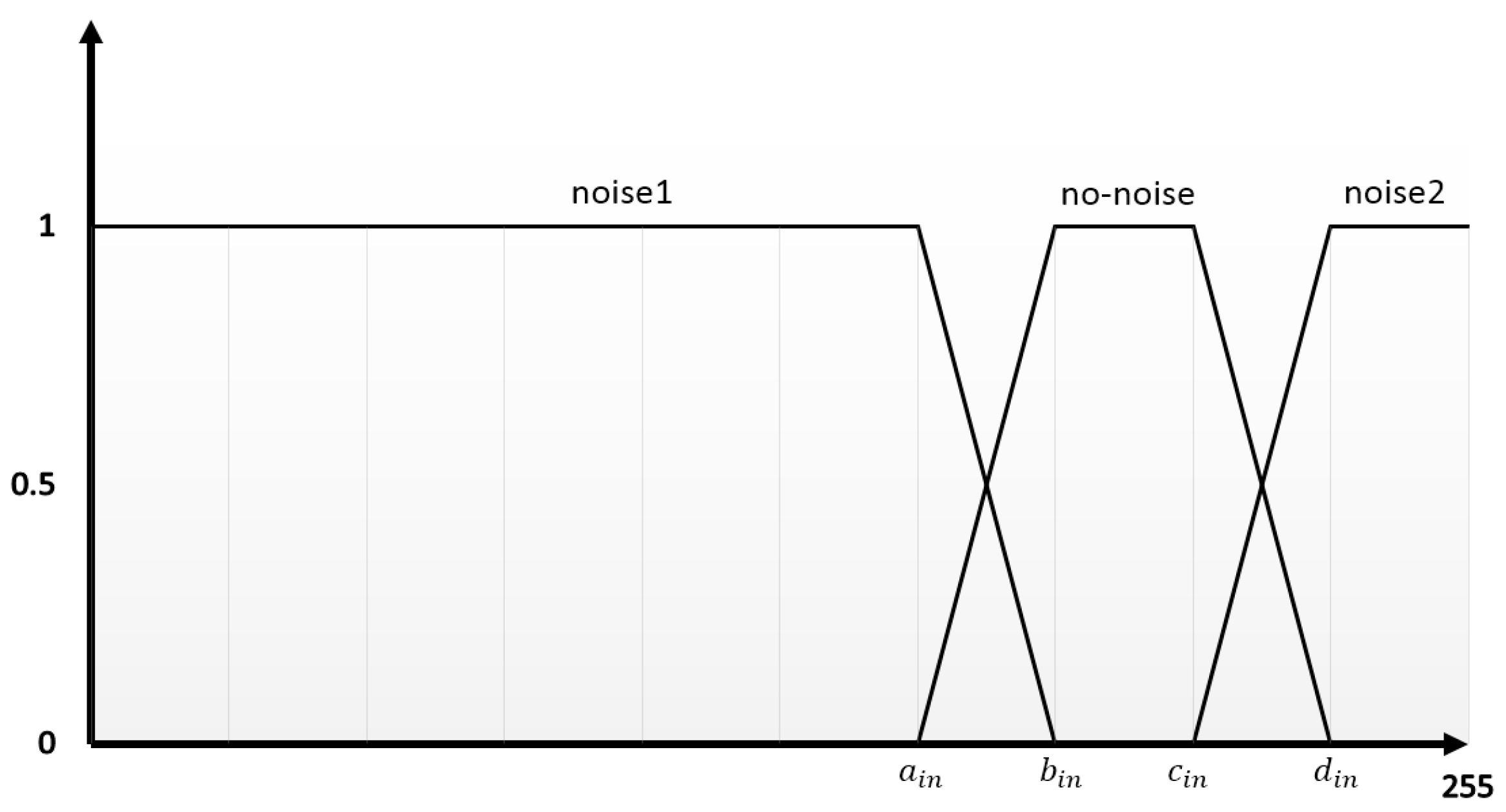
3.1. Fuzzy ROR Noise Detection
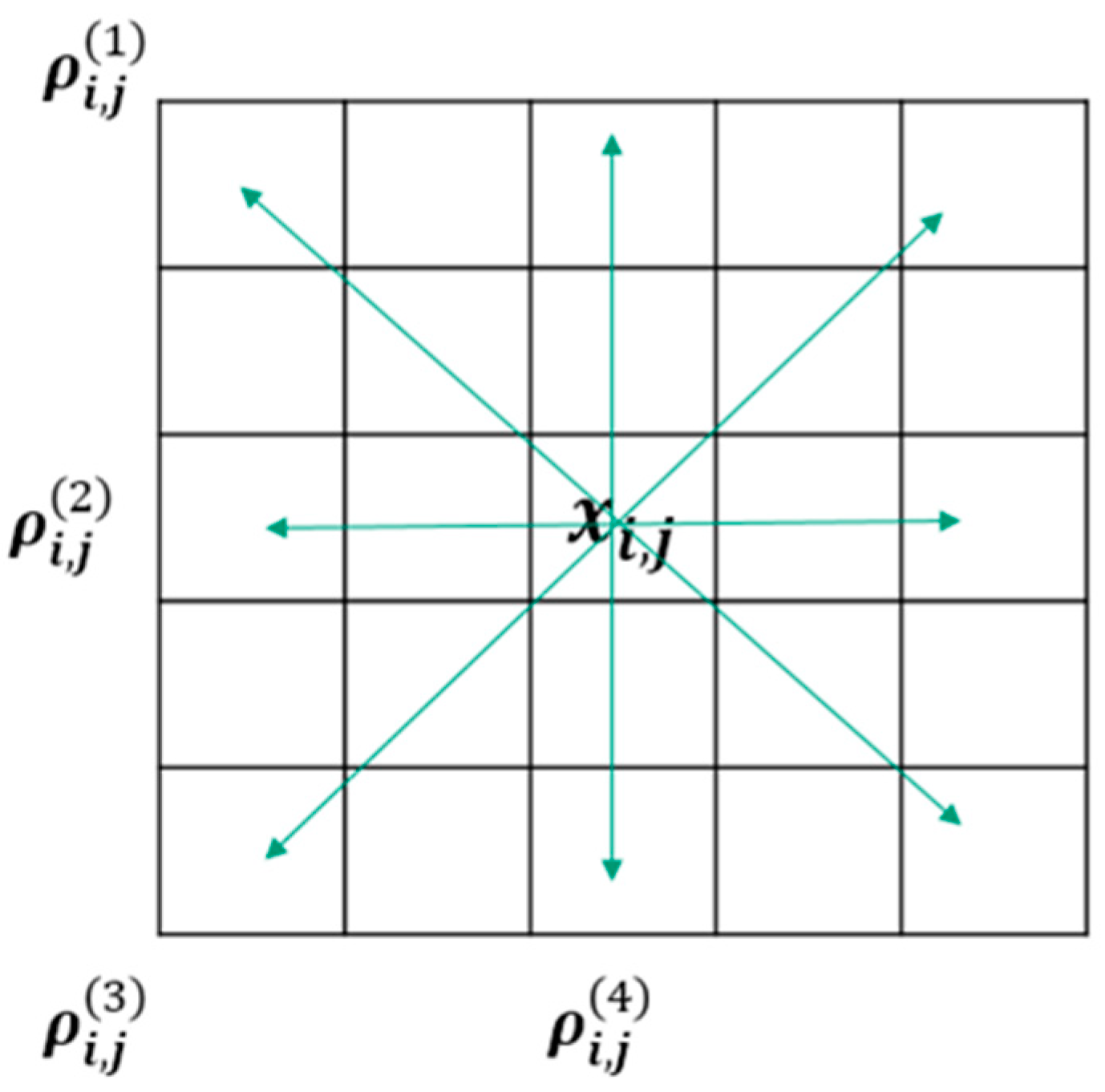
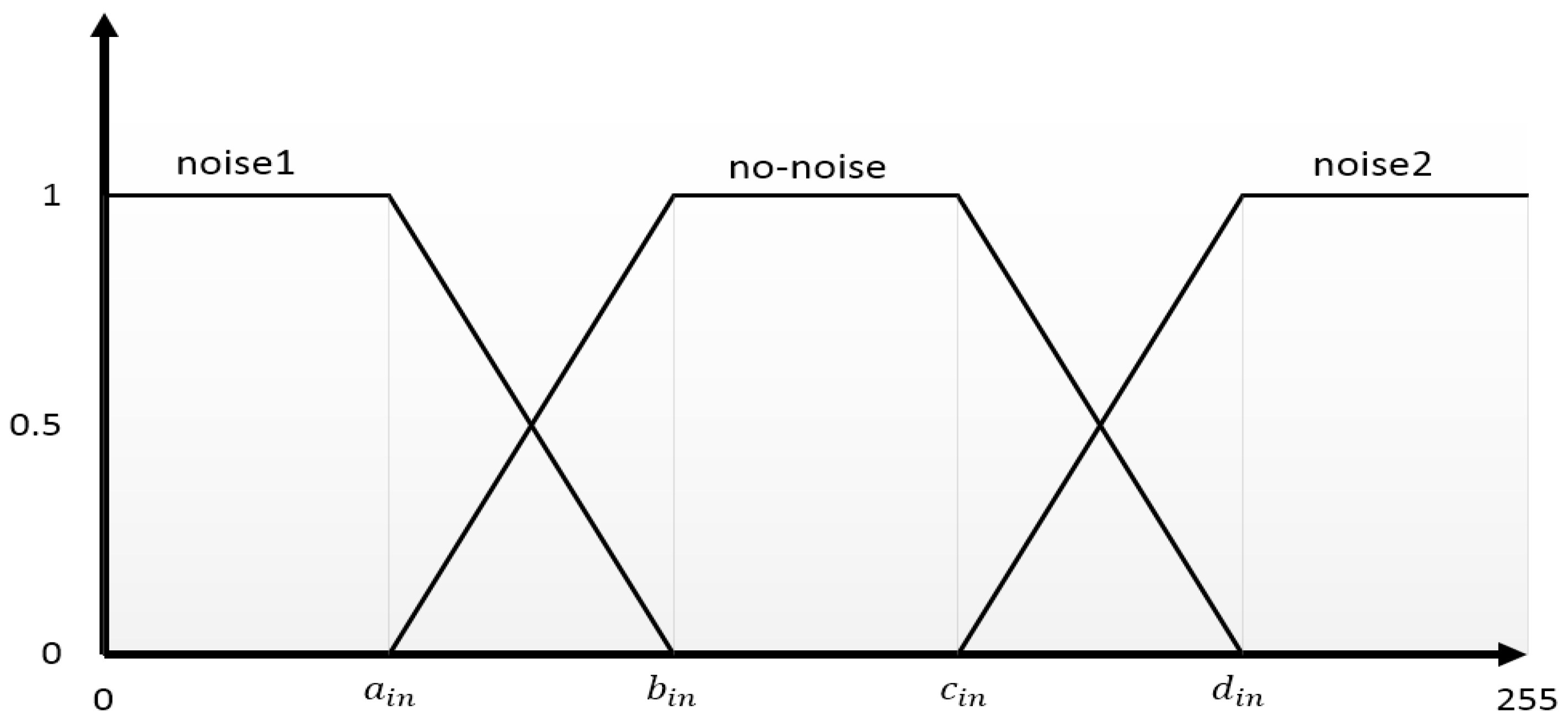
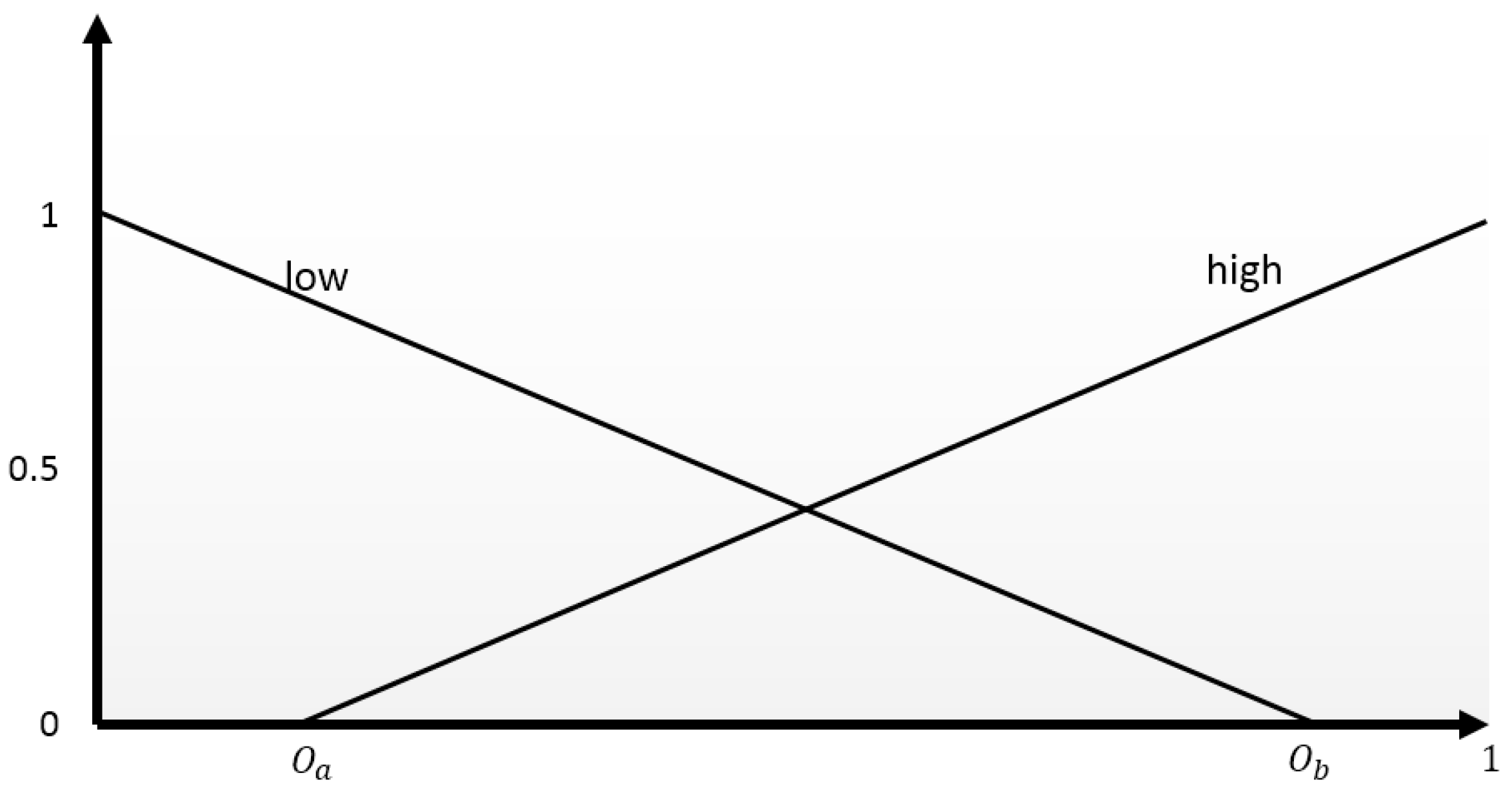
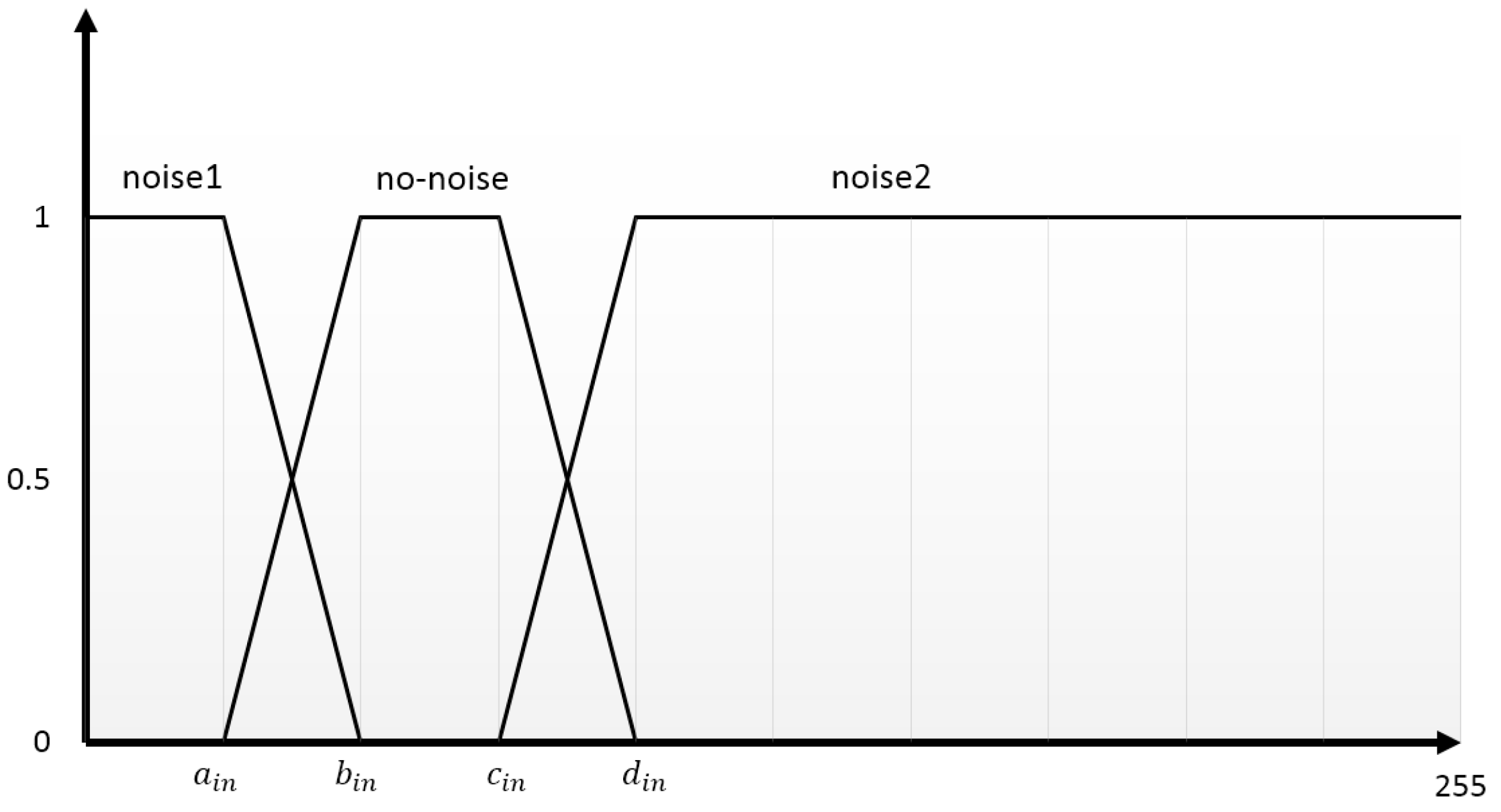
3.2. Noise Cancellation by Adaptive Fuzzy Directional Weighted Mean
- Rule 1.IFxi,j is at nosie1, THEN its importance is low.
- Rule 2.IFxi,j is at noise2, THEN its importance is low.
- Rule 3.IFxi,j is at no-noise, THEN its importance is high.
3.3. Algorithm of the Proposed AFWMF Model
- The enhanced coarse stage includes the following six steps, as follows:
- Choose parameters for Lc = 1; initialize the flag matrix to all zero.
- For every pixel in the image, find its ROR, the relative divergence d among the filtering window’s median, and the active pixel.
- Use the coarse stage of ROR described in Section 2.2 to detect the noise in the active pixel. Good and noisy pixels are represented by zeros and ones, respectively.
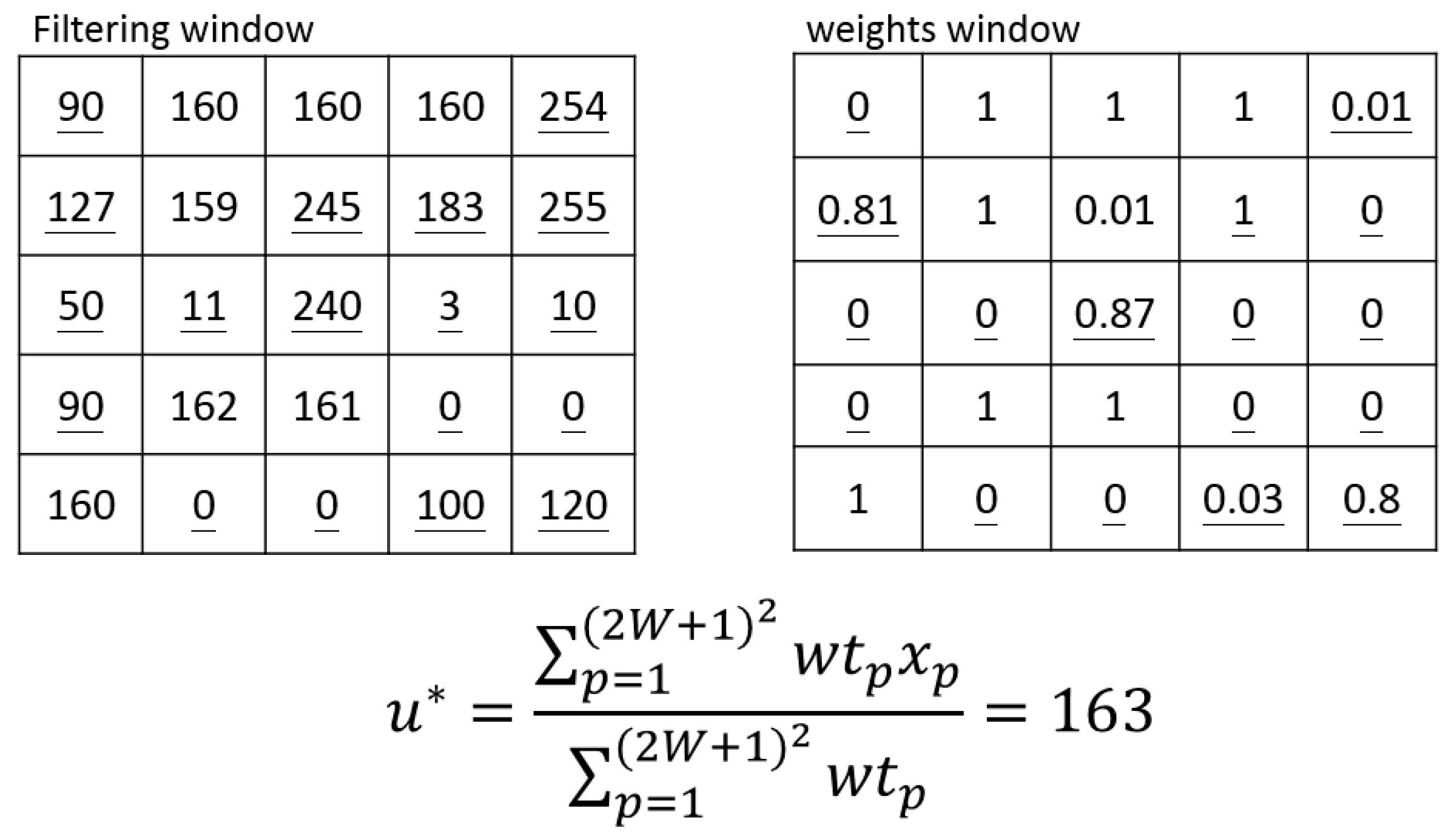
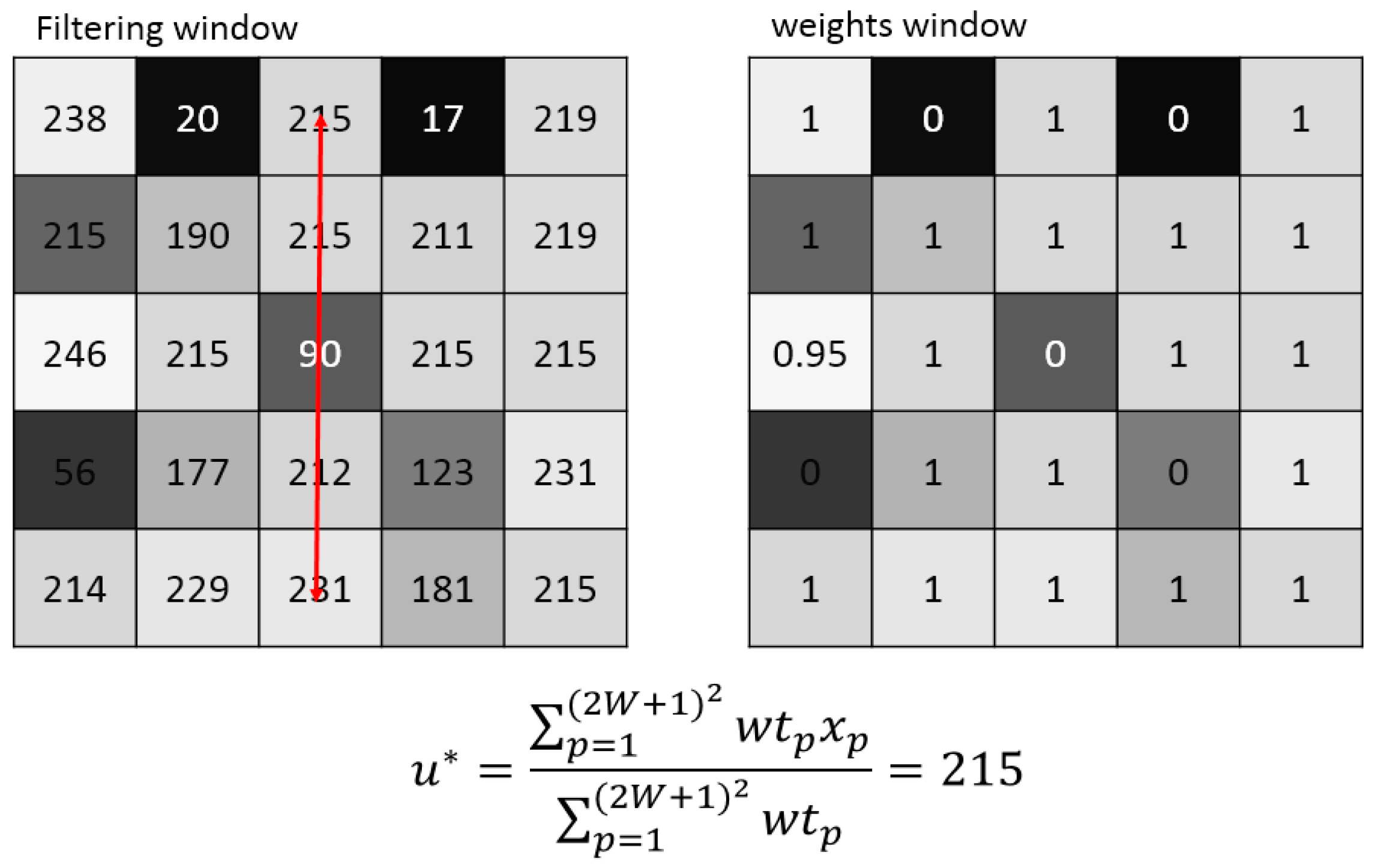
- Following the use of Equations (7)–(14) to build the input membership function and according to three-rules-based filter stage described in Section 3.2, we obtain the pixel weights in a filtering window.
- By obtaining the value of restoring pixels from Equation (17), let Lc = Lc + 1.
- Use Equation (5) for judging and stopping the enhanced coarse stage; otherwise, go to Step 2.
- The enhanced fine stage includes the following six steps:
- Choose parameters for Lf = 1; initialize the flag matrix to all zeros.
- For every pixel in the image, find its ROR, the relative divergence d among the filtering window’s median, and the active pixel.
- Use the fine stage of ROR described in Section 2.2 to detect the noise in the active pixel. Good and noisy pixels are represented by zeros and ones, respectively.
- Use Equations (7)–(14) to build the input membership function. According to the three rules-based filter stage described in Section 3.2, obtain the pixel weights in the filtering window.
- By obtaining the value of restoring pixel from Equation (17), let Lf = Lf + 1.
- Use Equation (5) for judging and stopping the enhanced fine stage; otherwise, go to Step 2.
4. Experiment Results and Discussions
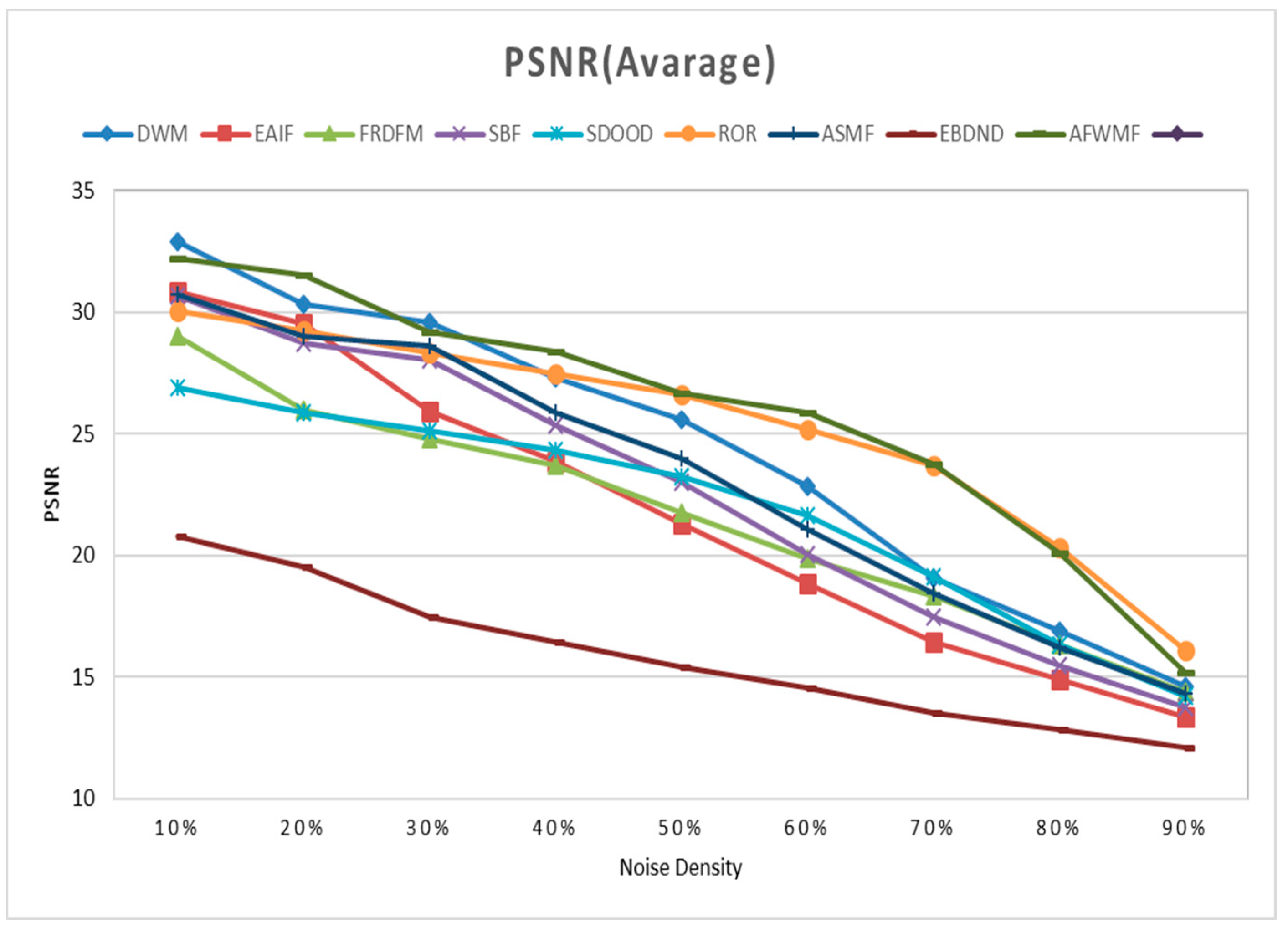
4.1. Restoration Performance Measurements
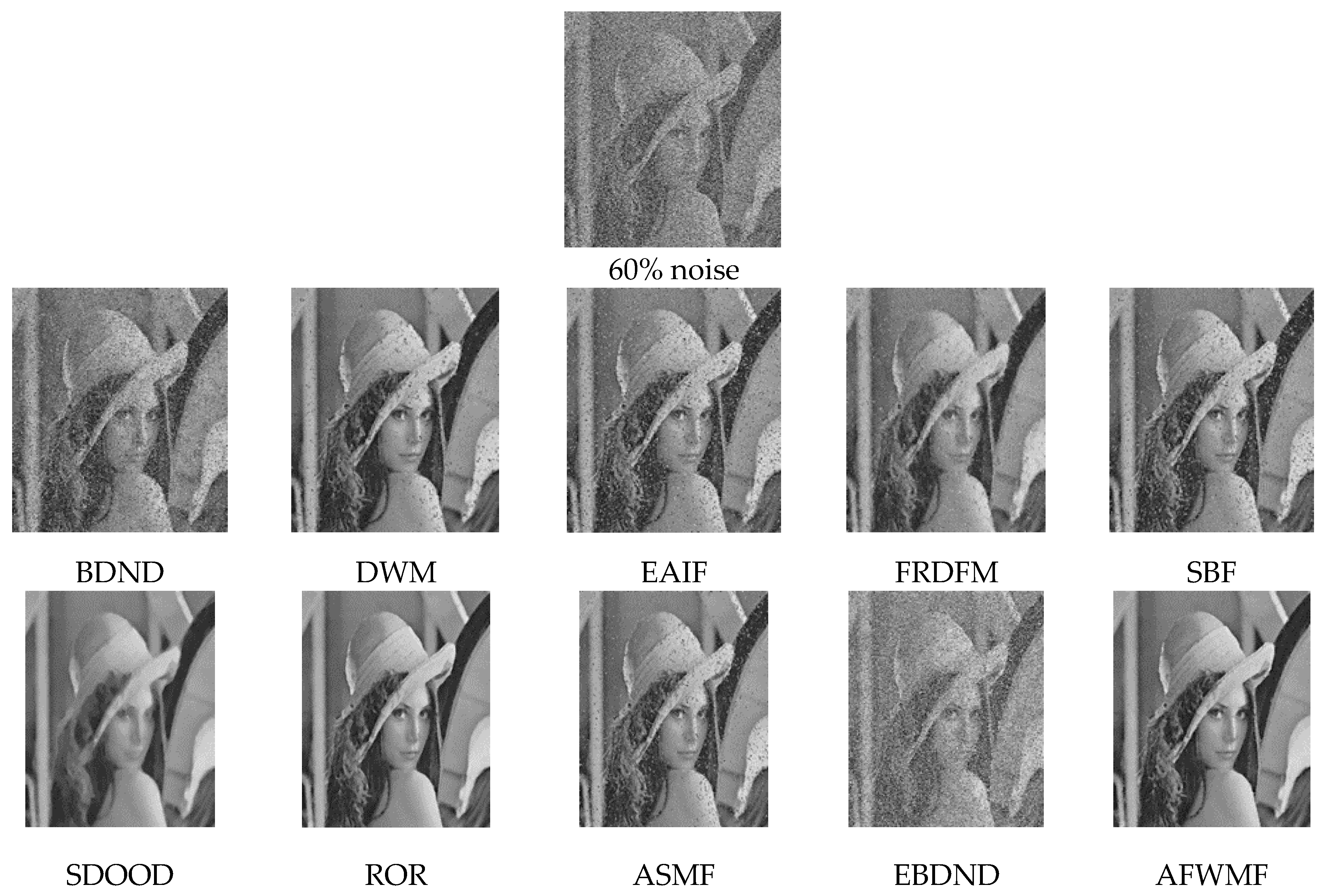
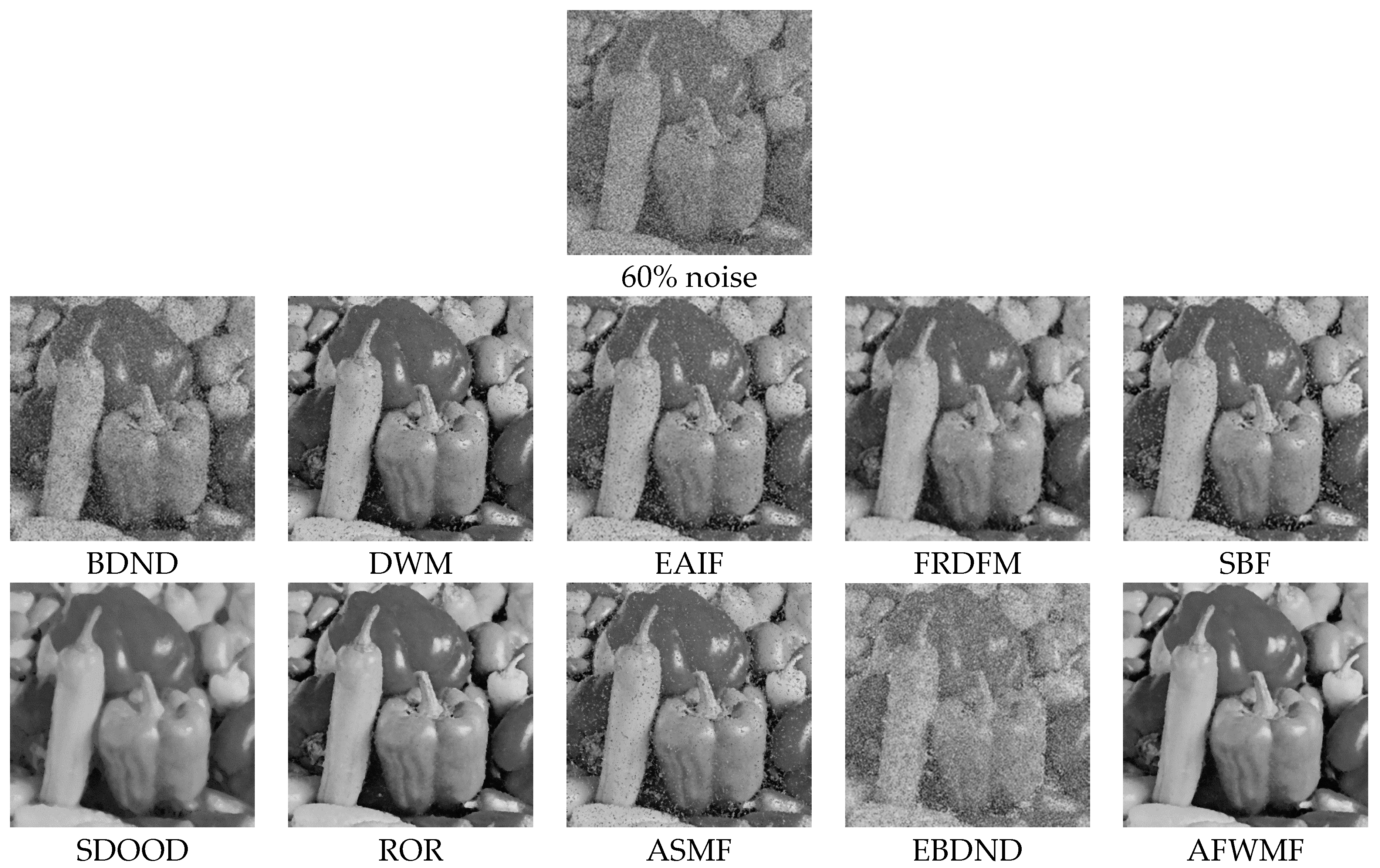
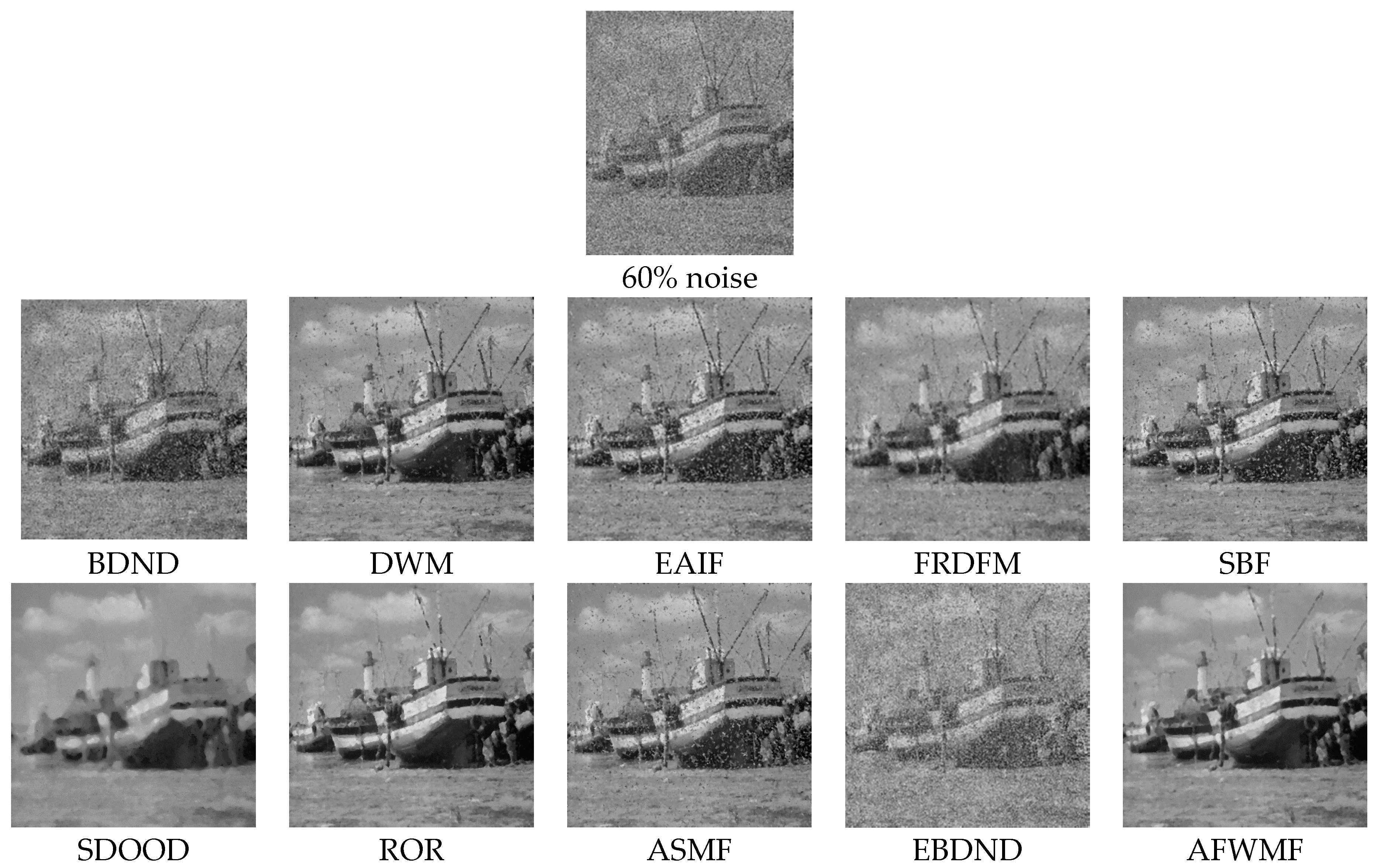
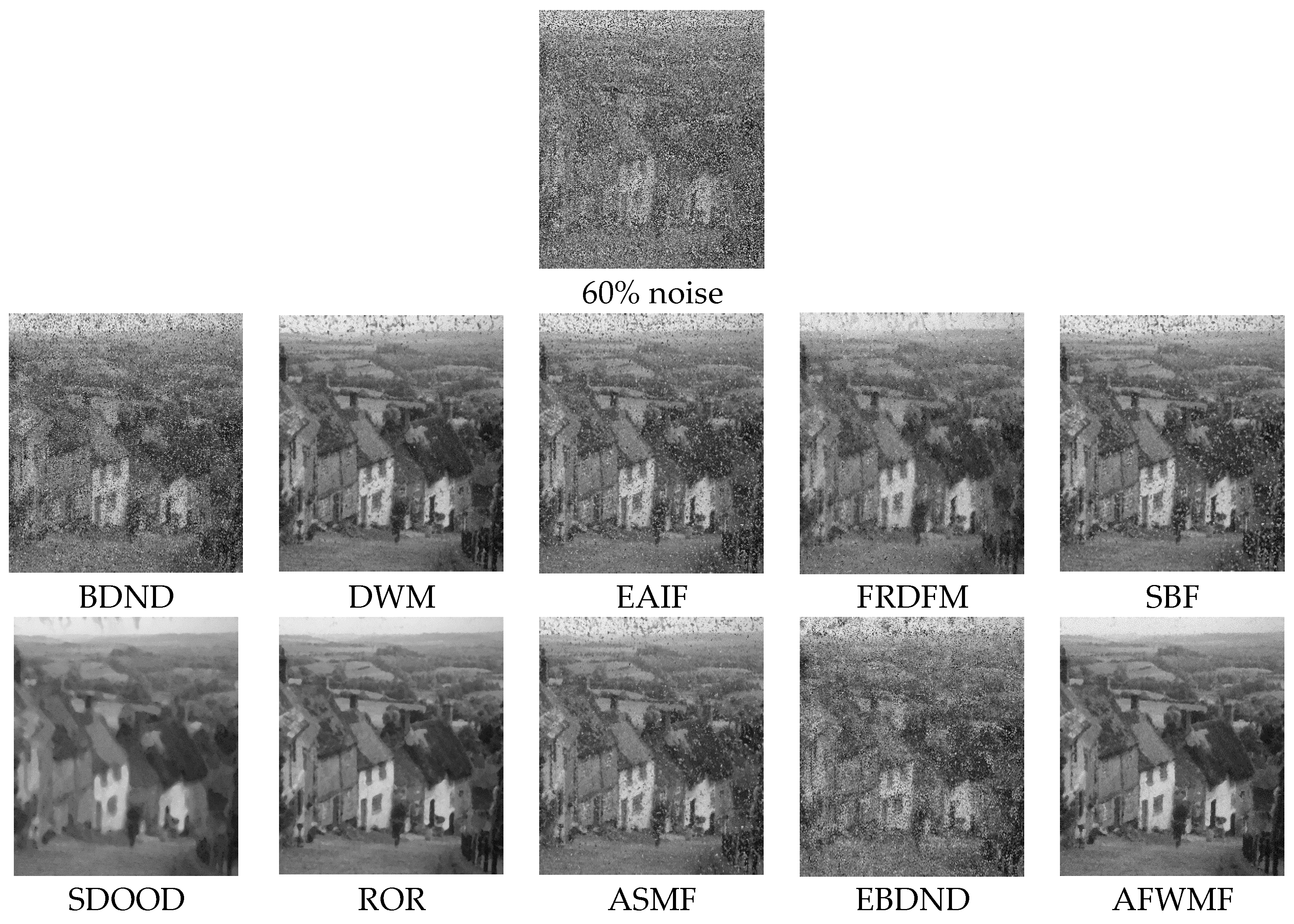
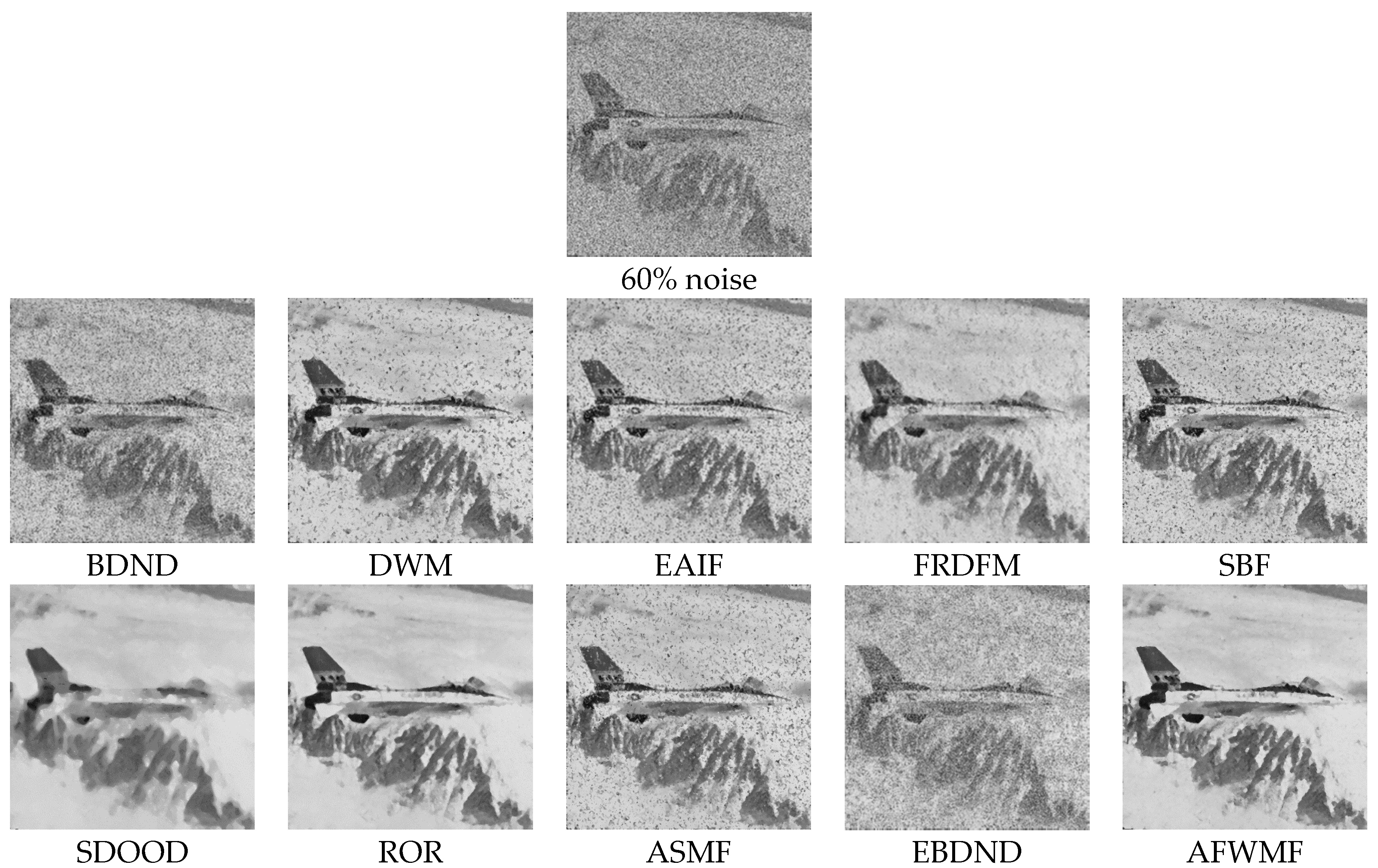
4.2. Psycho-Visual Performance Comparison
4.3. Stop Iteration Comparison
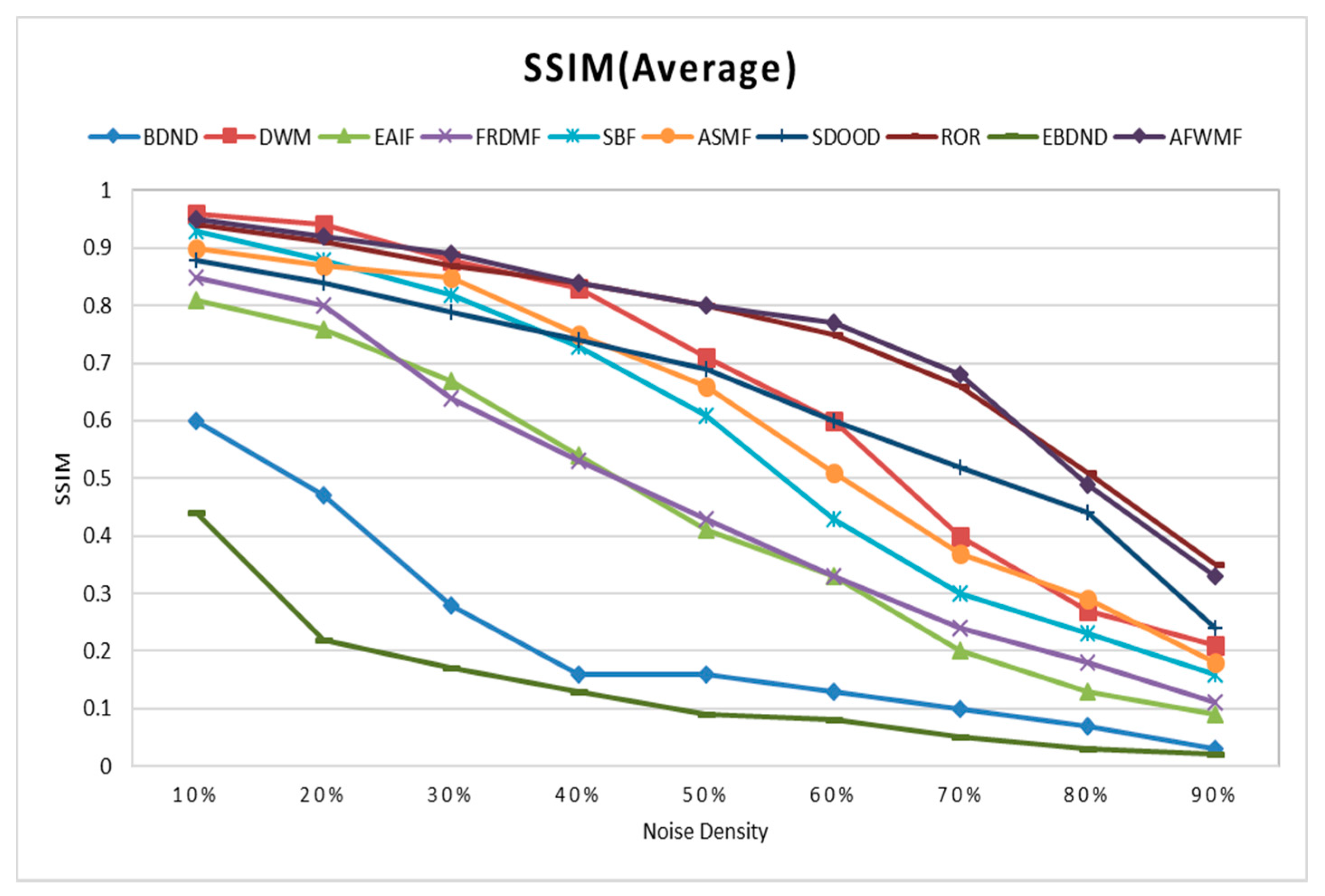
4.4. Performance Comparison of SSIM
4.5. Discussions for the Related Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bull, D.R.; Zhang, F. Intelligent Image and Video Compression, 2nd ed.; Academic Press: London, UK, 2021. [Google Scholar] [CrossRef]
- Kok, C.-W.; Tam, W.-S. Image Quality. Digital Image Interpolation in Matlab; Wiley-IEEE Press: New York, NY, USA, 2019; pp. 71–89. [Google Scholar] [CrossRef]
- Lin, C.-H.; Tsai, J.-S.; Chiu, C.-T. Switching bilateral filter with a texture/noise detector for universal noise removal. IEEE Trans. Image Process. 2010, 19, 2307–2320. [Google Scholar] [PubMed]
- Vasanth, K.; Varatharajan, R. An adaptive content based closer proximity pixel replacement algorithm for high density salt and pepper noise removal in images. J. Ambient Intell. Hum. Comput. 2020. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhao, Y.; Zhou, N.; Wang, H.; Jiang, D. A short review of some analog-to-digital converters resolution enhancement methods. Measurement 2021, 180, 109554. [Google Scholar] [CrossRef]
- Vasanth, K.; Varatharajan, R. A decision based unsymmetrical trimmed modified winsorized variants for the removal of high-density salt and pepper noise in images and videos. Comput. Commun. 2020, 154, 433–441. [Google Scholar]
- Thanh, D.N.; Hien, N.N.; Kalavathi, P.; Prasath, V.S. Adaptive switching weight mean filter for salt and pepper image denoising. Procedia Comput. Sci. 2020, 171, 292–301. [Google Scholar] [CrossRef]
- Sadrizadeh, S.; Zarmehi, N.; Kangarshahi, E.A.; Abin, H.; Marvasti, F. A fast iterative method for removing impulsive noise from sparse signals. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 38–48. [Google Scholar] [CrossRef] [Green Version]
- Ng, P.-E.; Ma, K.-K. A switching median filter with boundary discriminative noise detection for extremely corrupted images. IEEE Trans. Image Process. 2006, 15, 1506–1516. [Google Scholar]
- Shah, A.; Bangash, J.I.; Khan, A.W.; Ahmed, I.; Khan, A.; Khan, A.; Khan, A. Comparative analysis of median filter and its variants for removal of impulse noise from gray scale images. J. King Saud Univ. Comput. Inf. Sci. 2020. [Google Scholar] [CrossRef]
- Shu, L.; Du, H. Side window weighted median image filtering. In Proceedings of the 2020 5th International Conference on Multimedia Systems and Signal Processing, Chengdu, China, 28–30 May 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 26–30. [Google Scholar] [CrossRef]
- Sohi, P.J.S.; Sharma, N.; Garg, B.; Arya, K.V. Noise density range sensitive mean-median filter for impulse noise removal. In Innovations in Computational Intelligence and Computer Vision; Advances in Intelligent Systems and Computing; Sharma, M.K., Dhaka, V.S., Perumal, T., Dey, N., Tavares, J.M.R.S., Eds.; Springer: Singapore, 2020; Volume 1189. [Google Scholar] [CrossRef]
- Sheela, C.J.; Suganthi, G. An efficient denoising of impulse noise from MRI using adaptive switching modified decision based unsymmetric trimmed median filter. Biomed. Signal Process. Control 2020, 55, 101657. [Google Scholar] [CrossRef]
- Bhargava, P.; Prasad, A. Diminishing impulse noise using fuzzy switching median filter. Int. J. Adv. Res. Sci. Commun. Technol. 2020, 1, 60–65. [Google Scholar]
- Tao, C.; Kai-Kuang, M.; Li-Hui, C. Tri-state median filter for image denoising. IEEE Trans. Image Process. 1999, 8, 1834–1838. [Google Scholar]
- Singh, I.; Verma, O.P. Impulse noise removal in color image sequences using fuzzy logic. Multimed. Tools Appl. 2021, 80, 18279–18300. [Google Scholar] [CrossRef]
- Kang, C.C.; Wang, W.J. Modified switching median filter with one more noise detector for impulse noise removal. Int. J. Electron. Commun. Assoc. Comput. 2008, 63, 998–1004. [Google Scholar] [CrossRef]
- Kang, C.C.; Wang, W.J. Fuzzy reasoning-based directional median filter design. Signal Process. 2009, 89, 344–351. [Google Scholar] [CrossRef]
- Ibrahim, H.; Pik Kong, N.S.; Ng, T.F. Simple adaptive median filter for the removal of impulse noise from highly corrupted images. IEEE Trans. Consum. Electron. 2008, 54, 1920–1927. [Google Scholar] [CrossRef]
- Srinivasan, K.S.; Ebenezer, D. A new fast and efficient decision-based algorithm for removal of high-density impulse noises. IEEE Signal Process Lett. 2007, 14, 189–192. [Google Scholar] [CrossRef]
- Liang, S.; Lu, S.; Chang, J.; Lin, C. A novel two-stage impulse noise removal technique based on neural networks and fuzzy decision. IEEE Trans. Fuzzy Syst. 2008, 16, 863–873. [Google Scholar] [CrossRef]
- Luo, W. An efficient algorithm for the removal of impulse noise from corrupted images. Int. J. Electron. Commun. 2007, 61, 551–555. [Google Scholar] [CrossRef]
- Aizenberg, I.; Butakoff, C.; Paliy, D. Impulsive noise removal using threshold Boolean filtering based on the impulse detecting functions. IEEE Signal Process Lett. 2005, 12, 63–66. [Google Scholar] [CrossRef]
- Crnojevic, V.; Senk, V.; Trpovski, Z. Advanced impulse detection based on pixel-wise MAD. IEEE Signal Process Lett. 2004, 11, 589–592. [Google Scholar] [CrossRef]
- Bo, X.; Zhouping, Y. A universal denoising framework with a new impulse detector and nonlocal means. IEEE Trans. Image Process. 2012, 21, 1663–1675. [Google Scholar]
- Ghanekar, U.; Singh, A.K.; Pandey, R. A contrast enhancement-based filter for removal of random valued impulse noise. IEEE Signal Process Lett. 2010, 17, 47–50. [Google Scholar] [CrossRef]
- Chou, H.-H.; Lin, H.-W.; Chang, J.-R. A sparsity-ranking edge-preservation filter for removal of high-density impulse noises. Int. J. Electron. Commun. 2014, 68, 1129–1135. [Google Scholar] [CrossRef]
- Maronna, R.M.R.; Yohar, V. Robust Statistics: Theory and Methods; Wiley: Chichester, UK, 2006. [Google Scholar]
- Awad, A.S. Standard deviation for obtaining the optimal direction in the removal of impulse noise. IEEE Signal Process Lett. 2011, 18, 407–410. [Google Scholar] [CrossRef]
- Jafar, I.F.; AlNa’mneh, R.A.; Darabkh, K.A. Efficient improvements on the BDND filtering algorithm for the removal of high-density impulse noise. IEEE Trans. Image Process. 2013, 22, 1223–1232. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level Name | Fourth Level | Third Level | Second Level | The Most Like Level |
|---|---|---|---|---|
| ROR values | ||||
| thresholds of coarse stage | - 1 | |||
| thresholds of fine stage |
| Noise Ratio (%) | ||
|---|---|---|
| Model\Ratio | 10% | 20% | 30% | 40% | 50% | 60% | 70% | 80% | 90% | Count (Rank) |
|---|---|---|---|---|---|---|---|---|---|---|
| BDND | 23.78 (9) | 20.56 (9) | 18.74 (9) | 17.52 (9) | 16.48 (9) | 15.41 (9) | 14.48 (9) | 13.40 (9) | 12.57 (9) | 81 (9) |
| DWM | 36.43 (1) | 34.59 (2) | 32.18 (2) | 30.36 (2) | 27.01 (3) | 24.68 (3) | 20.31 (4) | 17.77 (3) | 15.12 (4) | 24 (2) |
| EAIF | 34.91 (3) | 33.02 (4) | 26.68 (7) | 25.48 (7) | 21.11 (8) | 19.60 (8) | 17.18 (8) | 15.45 (8) | 13.78 (8) | 61 (7) |
| FRDFM | 30.11 (8) | 28.00 (7) | 25.68 (8) | 24.11 (8) | 22.52 (7) | 20.87 (7) | 19.15 (6) | 17.08 (5) | 15.05 (5) | 61 (7) |
| SBF | 33.93 (5) | 32.21 (6) | 30.16 (5) | 27.79 (5) | 24.25 (6) | 23.36 (4) | 18.57 (7) | 16.17 (7) | 14.42 (7) | 52 (6) |
| SDOOD | 28.73 (7) | 27.80 (8) | 26.98 (6) | 26.08 (6) | 24.80 (5) | 23.21 (5) | 20.60 (3) | 17.33 (4) | 15.21 (3) | 47 (5) |
| ROR | 33.51 (6) | 32.41 (5) | 31.25 (3) | 30.02 (3) | 28.78 (2) | 27.48 (2) | 25.41 (2) | 21.81 (1) | 17.29 (1) | 25 (3) |
| ASMF | 34.61 (4) | 33.35 (3) | 31.01 (4) | 28.50 (4) | 25.36 (4) | 22.46 (6) | 19.76 (5) | 16.96 (6) | 14.82 (6) | 42 (4) |
| EBDND | 20.67 (10) | 20.28 (10) | 18.01 (10) | 16.97 (10) | 16.00 (10) | 15.07 (10) | 14.37 (10) | 13.23 (10) | 12.38 (10) | 90 (10) |
| AFWMF | 35.53 (2) | 35.11 (1) 2 | 32.26 (1) | 30.83 (1) | 29.06 (1) | 28.24 (1) | 25.62 (1) | 21.77 (2) | 16.22 (2) | 12 3 (1) |
| Model\Ratio | 10% | 20% | 30% | 40% | 50% | 60% | 70% | 80% | 90% | Count (Rank) |
|---|---|---|---|---|---|---|---|---|---|---|
| BDND | 23.24 (9) | 20.02 (9) | 18.29 (9) | 17.05 (9) | 15.88 (9) | 15.02 (9) | 13.82 (9) | 13.06 (9) | 12.23 (9) | 81 (9) |
| DWM | 32.88 (1) | 30.32 (2) | 29.59 (1) | 27.27 (3) | 25.61 (3) | 22.84 (3) | 19.06 (4) | 16.90 (3) | 14.58 (3) | 23 (2) |
| EAIF | 30.83 (3) | 29.51 (3) | 25.95 (6) | 23.89 (7) | 21.30 (8) | 18.83 (8) | 16.43 (8) | 14.91 (8) | 13.34 (8) | 59 (8) |
| FRDFM | 29.02 (7) | 25.98 (7) | 24.78 (8) | 23.67 (8) | 21.77 (7) | 19.88 (7) | 18.33 (6) | 16.31 (4) | 14.39 (4) | 58 (7) |
| SBF | 30.67 (5) | 28.71 (6) | 28.05 (5) | 25.34 (5) | 22.99 (6) | 20.06 (6) | 17.48 (7) | 15.49 (7) | 13.75 (7) | 54 (6) |
| SDOOD | 26.88 (8) | 25.87 (8) | 25.15 (7) | 24.35 (6) | 23.25 (5) | 21.65 (4) | 19.14 (3) | 16.31 (4) | 14.18 (6) | 51 (5) |
| ROR | 30.03 (6) | 29.23 (4) | 28.35 (4) | 27.47 (2) | 26.60 (2) | 25.18 (2) | 23.70 (2) | 20.30 (1) | 16.09 (1) | 24 (3) |
| ASMF | 30.74 (4) | 29.00 (5) | 28.63 (3) | 25.84 (4) | 23.99 (4) | 21.04 (5) | 18.46 (5) | 16.23 (6) | 14.35 (5) | 41 (4) |
| EBDND | 20.76 (10) | 19.54 (10) | 17.49 (10) | 16.45 (10) | 15.38 (10) | 14.57 (10) | 13.50 (10) | 12.83 (10) | 12.12 (10) | 90 (10) |
| AFWMF | 32.22 (2) | 31.52 (1) | 29.19 (2) | 28.38 (1) | 26.65 (1) | 25.86 (1) | 23.75 (1) | 20.12 (2) | 15.18 (2) | 13 (1)4 |
| Ratio\Image | Lena | Gold Hill | Boat | Peppers | Plane | The Best |
|---|---|---|---|---|---|---|
| 10% | AFWMF | DWM | EAIF | DWM | DWM | DWM |
| 20% | AFWMF | AFWMF | AFWMF | AFWMF | DWM | AFWMF |
| 30% | AFWMF | AFWMF | AFWMF | ROR | DWM | AFWMF |
| 40% | AFWMF | AFWMF | AFWMF | AFWMF | ROR | AFWMF |
| 50% | AFWMF | ROR | AFWMF | AFWMF | AFWMF | AFWMF |
| 60% | AFWMF | AFWMF | AFWMF | ROR | ROR | AFWMF |
| 70% | AFWMF | AFWMF | AFWMF | ROR | AFWMF | AFWMF |
| 80% | ROR | ROR | ROR | ROR | ROR | ROR |
| 90% | ROR | ROR | ROR | ROR | ROR | ROR |
| Model\Ratio | Lena | Gold Hill | Boat | Peppers | Plane | Count | Rank (for Ratio 60%) |
|---|---|---|---|---|---|---|---|
| BDND | 9 | 9 | 9 | 9 | 9 | 45 | 9 |
| DWM | 3 | 4 | 3 | 3 | 3 | 16 | 3 |
| EAIF | 8 | 8 | 8 | 8 | 8 | 40 | 8 |
| FRDFM | 7 | 6 | 7 | 6 | 6 | 32 | 7 |
| SBF | 4 | 7 | 5 | 7 | 7 | 30 | 6 |
| SDOOD | 5 | 2 | 6 | 4 | 4 | 21 | 4 |
| ROR | 2 | 4 | 2 | 1 | 2 | 11 | 2 |
| ASMF | 6 | 5 | 4 | 5 | 5 | 25 | 5 |
| EBDND | 10 | 9 | 9 | 10 | 10 | 48 | 10 |
| AFWMF | 1 | 1 | 1 | 2 | 1 | 6 | 1 |
| Model\Ratio | Lena | Gold Hill | Boat | Peppers | Plane | Count | Rank (for Ratio 30%) |
|---|---|---|---|---|---|---|---|
| BDND | 9 | 9 | 9 | 9 | 9 | 45 | 9 |
| DWM | 2 | 2 | 2 | 1 | 1 | 8 | 1 |
| EAIF | 7 | 6 | 5 | 6 | 8 | 32 | 6 |
| FRDFM | 8 | 8 | 7 | 8 | 6 | 37 | 8 |
| SBF | 5 | 3 | 4 | 5 | 4 | 21 | 4 |
| SDOOD | 6 | 5 | 8 | 7 | 7 | 33 | 7 |
| ROR | 3 | 7 | 6 | 3 | 5 | 24 | 5 |
| ASMF | 4 | 4 | 3 | 2 | 3 | 16 | 3 |
| EBDND | 10 | 10 | 10 | 9 | 9 | 48 | 10 |
| AFWMF | 1 | 1 | 1 | 4 | 2 | 9 | 2 |
| Model\Ratio | Lena | Gold Hill | Boat | Peppers | Plane | Count | Rank (for Ratio 50%) |
|---|---|---|---|---|---|---|---|
| BDND | 9 | 9 | 9 | 9 | 9 | 45 | 9 |
| DWM | 3 | 3 | 3 | 3 | 3 | 15 | 3 |
| EAIF | 8 | 6 | 7 | 8 | 8 | 37 | 7 |
| FRDFM | 7 | 8 | 8 | 7 | 7 | 37 | 7 |
| SBF | 6 | 7 | 5 | 6 | 6 | 30 | 6 |
| SDOOD | 5 | 1 | 6 | 5 | 5 | 22 | 5 |
| ROR | 2 | 4 | 2 | 2 | 2 | 12 | 2 |
| ASMF | 4 | 2 | 4 | 4 | 4 | 18 | 4 |
| EBDND | 9 | 9 | 9 | 9 | 9 | 45 | 9 |
| AFWMF | 1 | 2 | 1 | 1 | 1 | 6 | 1 |
| Model\Ratio | Lena | Gold Hill | Boat | Peppers | Plane | Count | Rank (for Ratio 70%) |
|---|---|---|---|---|---|---|---|
| BDND | 9 | 10 | 9 | 9 | 9 | 46 | 9 |
| DWM | 4 | 4 | 3 | 3 | 6 | 20 | 4 |
| EAIF | 8 | 8 | 8 | 8 | 8 | 40 | 8 |
| FRDFM | 6 | 5 | 5 | 6 | 4 | 26 | 6 |
| SBF | 7 | 7 | 6 | 7 | 7 | 34 | 7 |
| SDOOD | 3 | 2 | 6 | 4 | 3 | 18 | 3 |
| ROR | 2 | 3 | 1 | 1 | 2 | 9 | 2 |
| ASMF | 5 | 6 | 4 | 5 | 5 | 25 | 5 |
| EBDND | 10 | 8 | 9 | 10 | 10 | 47 | 10 |
| AFWMF | 1 | 1 | 2 | 2 | 1 | 7 | 1 |
| Noise Density | |||
|---|---|---|---|
| PSNR value | 28.52 | 26.60 | 23.71 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| PSNR value | 28.63 | 26.80 | 23.72 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| 31.25 | 29.13 | 24.99 | |
| 30.69 | 28.78 | 25.40 | |
| 30.58 | 28.70 | 25.41 | |
| 30.94 | 27.61 | 23.24 | |
| 29.54 | 29.18 | 25.66 | |
| PSRNR (AFWMF) | 31.54 | 29.18 | 25.66 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| 29.00 | 27.31 | 24.14 | |
| 28.62 | 27.23 | 23.32 | |
| 28.56 | 26.98 | 24.31 | |
| 28.18 | 26.49 | 22.53 | |
| 26.51 | 26.45 | 24.00 | |
| PSRNR (AFWMF) | 28.53 | 27.20 | 24.31 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| 26.63 | 26.50 | 22.58 | |
| 26.50 | 24.80 | 22.64 | |
| 25.97 | 25.01 | 22.64 | |
| 25.79 | 24.07 | 20.92 | |
| 24.89 | 23.51 | 22.17 | |
| PSRNR (AFWMF) | 26.88 | 25.11 | 22.61 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| 29.02 | 27.32 | 23.57 | |
| 28.67 | 27.18 | 23.56 | |
| 28.44 | 27.00 | 23.54 | |
| 27.94 | 26.81 | 21.81 | |
| 26.51 | 27.03 | 23.14 | |
| PSRNR (AFWMF) | 29.24 | 27.10 | 23.63 |
| Noise Density | 30% | 50% | 70% |
|---|---|---|---|
| 26.72 | 25.28 | 22.44 | |
| 26.05 | 25.03 | 22.44 | |
| 25.76 | 24.81 | 22.65 | |
| 26.20 | 24.41 | 20.62 | |
| 24.65 | 24.80 | 22.17 | |
| PSRNR (AFWMF) | 26.98 | 25.43 | 22.65 |
| Model\Ratio | 10% | 20% | 30% | 40% | 50% | 60% | 70% | 80% | 90% | Count (Rank) |
|---|---|---|---|---|---|---|---|---|---|---|
| BDND | 0.60 (9) | 0.47 (9) | 0.28 (9) | 0.16 (9) | 0.16 (9) | 0.13 (9) | 0.10 (9) | 0.07 (9) | 0.03 (9) | 81 (9) |
| DWM | 0.96 (1) | 0.94 (1) | 0.88 (2) | 0.83 (3) | 0.71 (3) | 0.60 (3) | 0.40 (4) | 0.27 (5) | 0.21 (4) | 26 (3) |
| EAIF | 0.81 (8) | 0.76 (8) | 0.67 (7) | 0.54 (7) | 0.41 (8) | 0.33 (7) | 0.20 (8) | 0.13 (8) | 0.09 (8) | 69 (8) |
| FRDFM | 0.85 (7) | 0.80 (7) | 0.64 (8) | 0.53 (8) | 0.43 (7) | 0.33 (7) | 0.24 (7) | 0.18 (7) | 0.11 (7) | 65 (7) |
| SBF | 0.93 (4) | 0.88 (4) | 0.82 (5) | 0.73 (6) | 0.61 (6) | 0.43 (6) | 0.30 (6) | 0.23 (6) | 0.16 (6) | 49 (6) |
| SDOOD | 0.90 (5) | 0.87 (5) | 0.85 (4) | 0.75 (4) | 0.66 (5) | 0.51 (5) | 0.37 (5) | 0.29 (4) | 0.18 (5) | 42 (5) |
| ROR | 0.88 (6) | 0.84 (6) | 0.79 (6) | 0.74 (5) | 0.69 (4) | 0.60 (3) | 0.52 (3) | 0.44 (3) | 0.24 (3) | 39 (4) |
| ASMF | 0.94 (3) | 0.91 (3) | 0.87 (3) | 0.84 (1) | 0.80 (1) | 0.75 (2) | 0.66 (2) | 0.51 (1) | 0.35 (1) | 17 (2) |
| EBDND | 0.44 (10) | 0.22 (10) | 0.17 (10) | 0.13 (10) | 0.09 (10) | 0.08 (10) | 0.05 (10) | 0.03 (10) | 0.02 (10) | 90 (10) |
| AFWMF | 0.95 (2) | 0.92 (2) | 0.89 (1) | 0.84 (1) | 0.80 (1) | 0.77 (1) | 0.68 (1) | 0.49 (2) | 0.33 (2) | 13 (1) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, J.-R.; Chen, Y.-S.; Lo, C.-M.; Chen, H.-C. An Advanced AFWMF Model for Identifying High Random-Valued Impulse Noise for Image Processing. Appl. Sci. 2021, 11, 7037. https://doi.org/10.3390/app11157037
Chang J-R, Chen Y-S, Lo C-M, Chen H-C. An Advanced AFWMF Model for Identifying High Random-Valued Impulse Noise for Image Processing. Applied Sciences. 2021; 11(15):7037. https://doi.org/10.3390/app11157037
Chicago/Turabian StyleChang, Jieh-Ren, You-Shyang Chen, Chih-Min Lo, and Huan-Chung Chen. 2021. "An Advanced AFWMF Model for Identifying High Random-Valued Impulse Noise for Image Processing" Applied Sciences 11, no. 15: 7037. https://doi.org/10.3390/app11157037
APA StyleChang, J. -R., Chen, Y. -S., Lo, C. -M., & Chen, H. -C. (2021). An Advanced AFWMF Model for Identifying High Random-Valued Impulse Noise for Image Processing. Applied Sciences, 11(15), 7037. https://doi.org/10.3390/app11157037