
Kinematic Analysis and Verification of a New 5-DOF Parallel Mechanism

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design and Verification of the Scheme
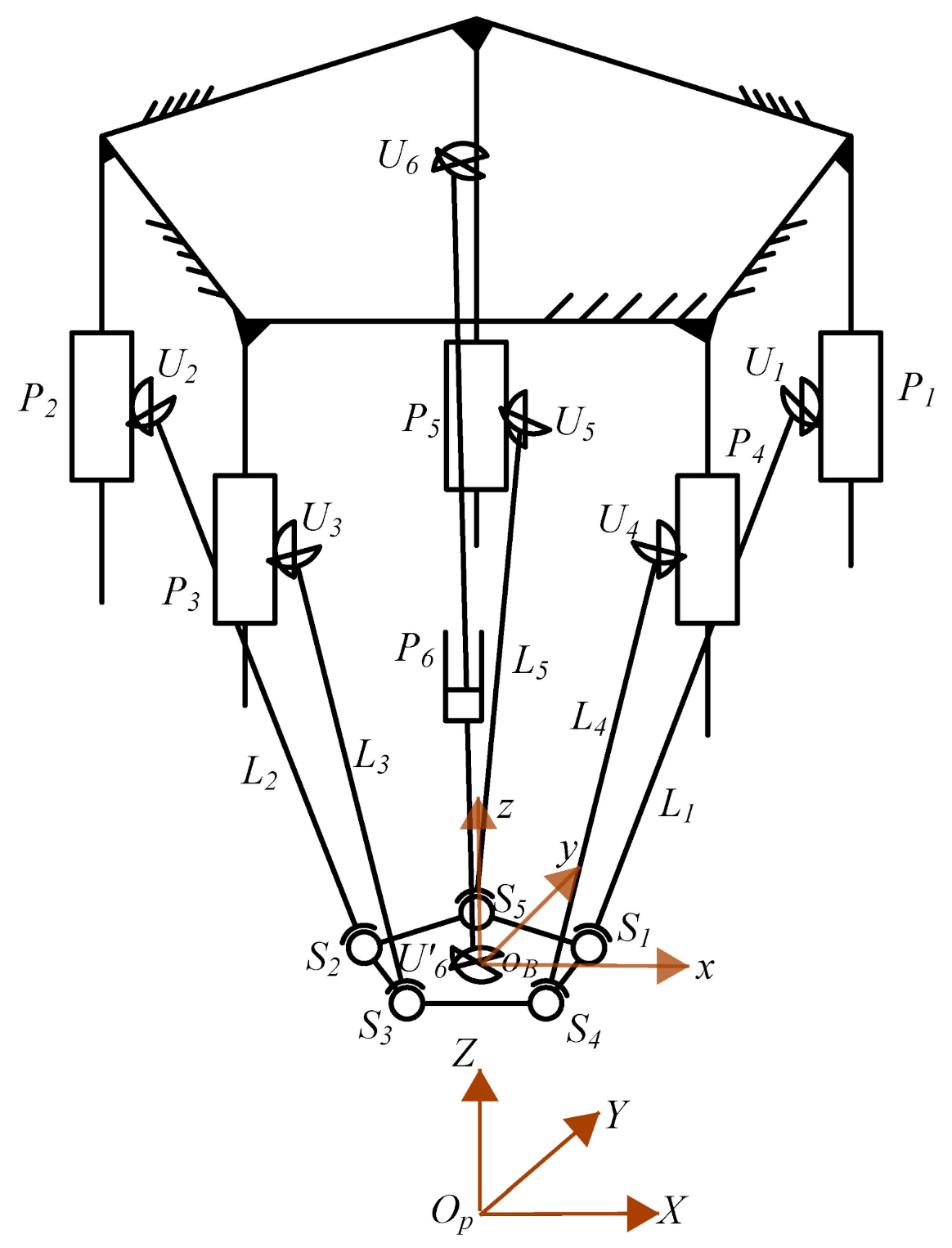
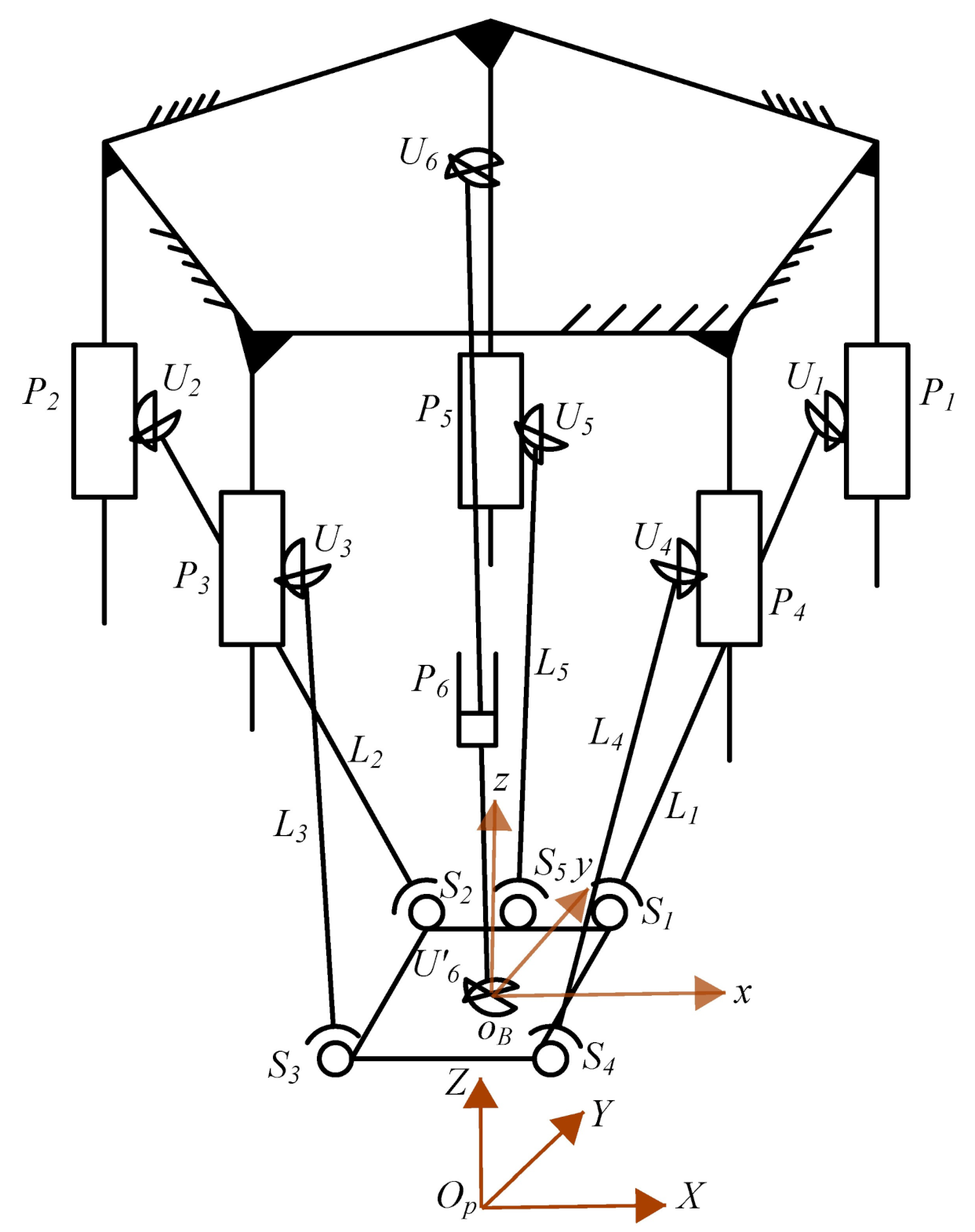
2.1. Design of the Primary Scheme
2.2. Verification of the Primary Scheme
2.2.1. Verification of Degree of Freedom by Grubler–Kutzbach Formula
2.2.2. Verification of Degree of Freedom by Screw Theory
2.3. Singularity Analysis
2.4. Scheme Improvement and Singularity Analysis
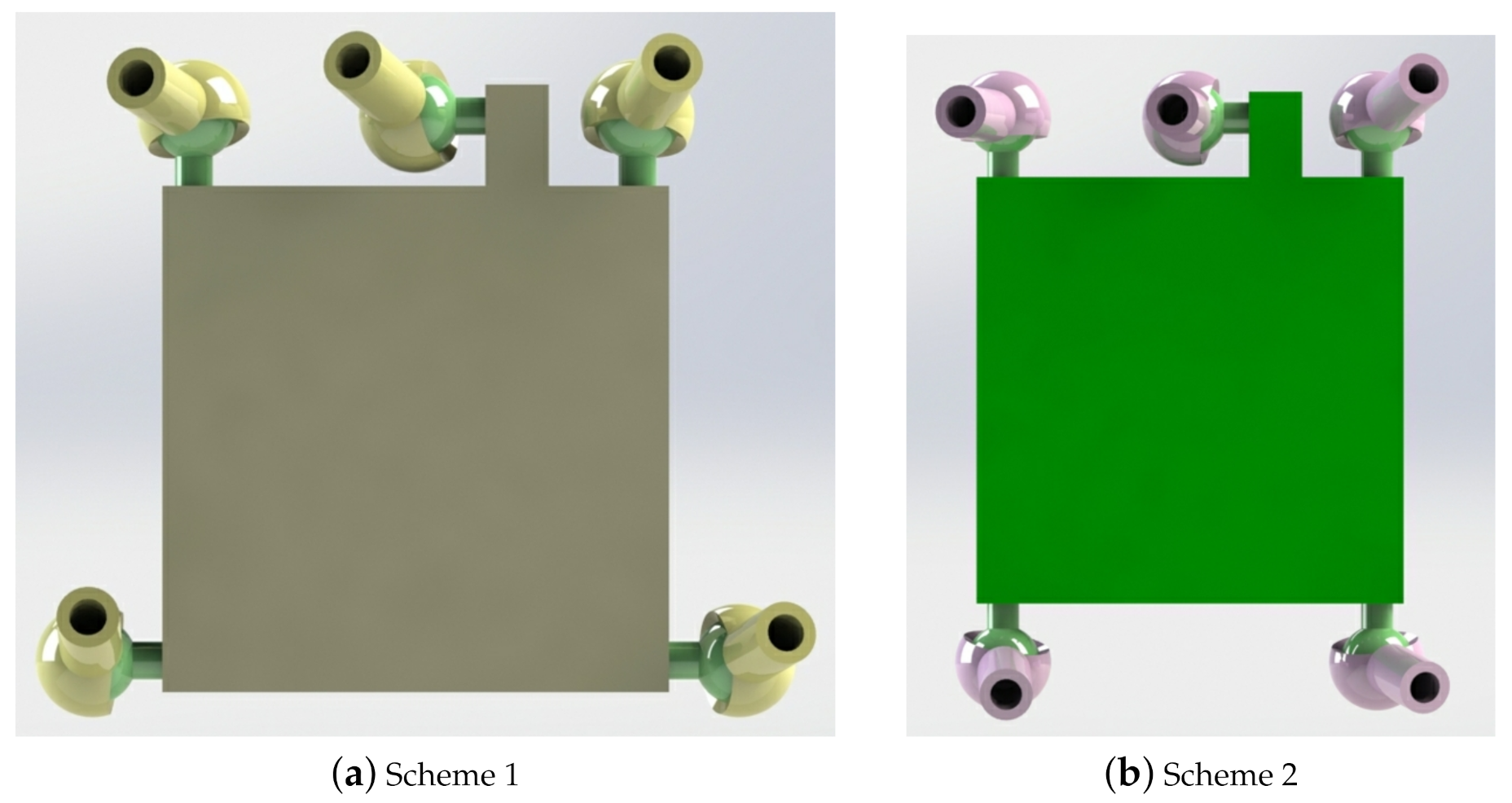
2.4.1. Scheme Improvement
2.4.2. Singularity Analysis of Improved Parallel Mechanism
3. Kinematic Analysis
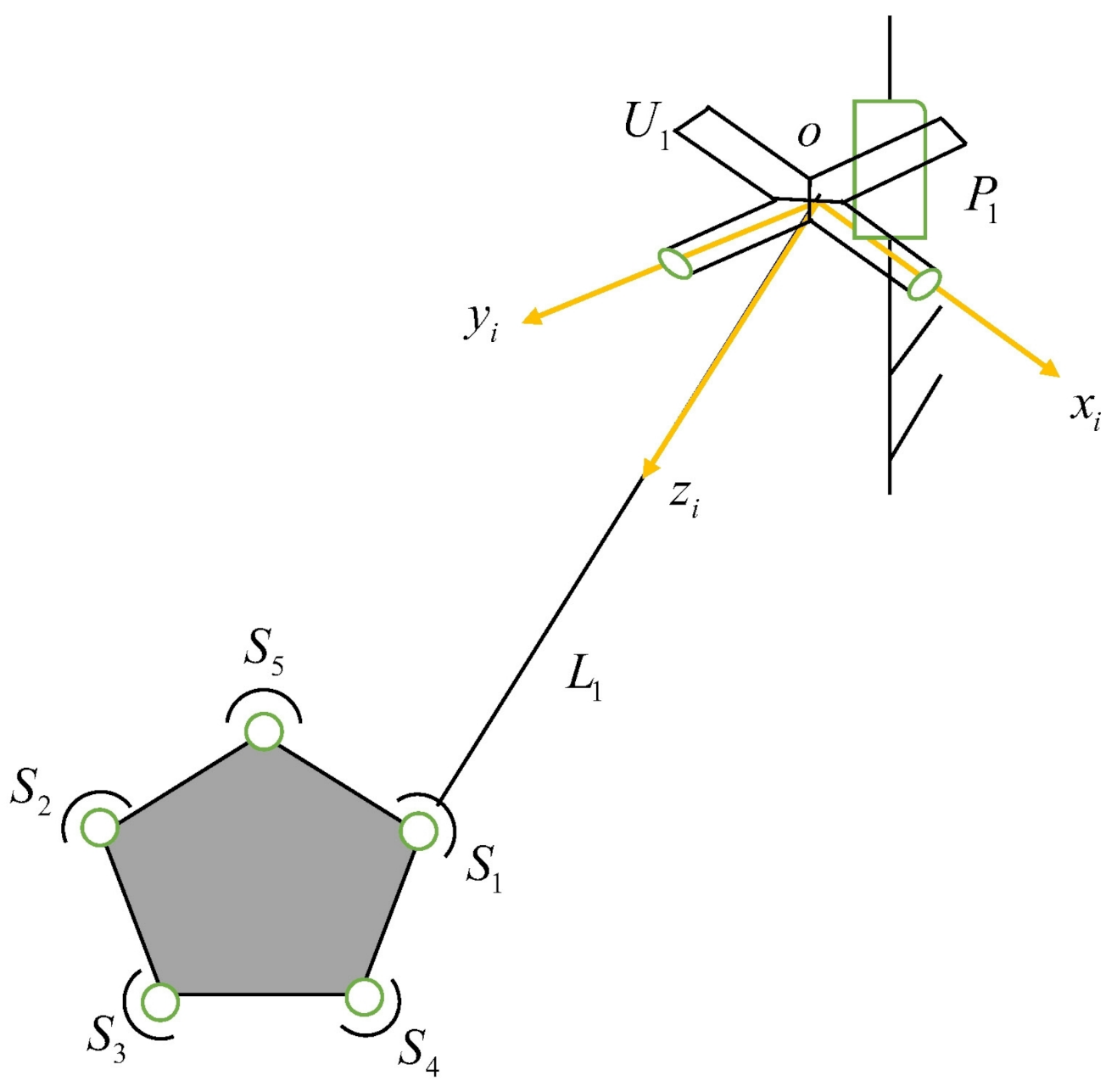
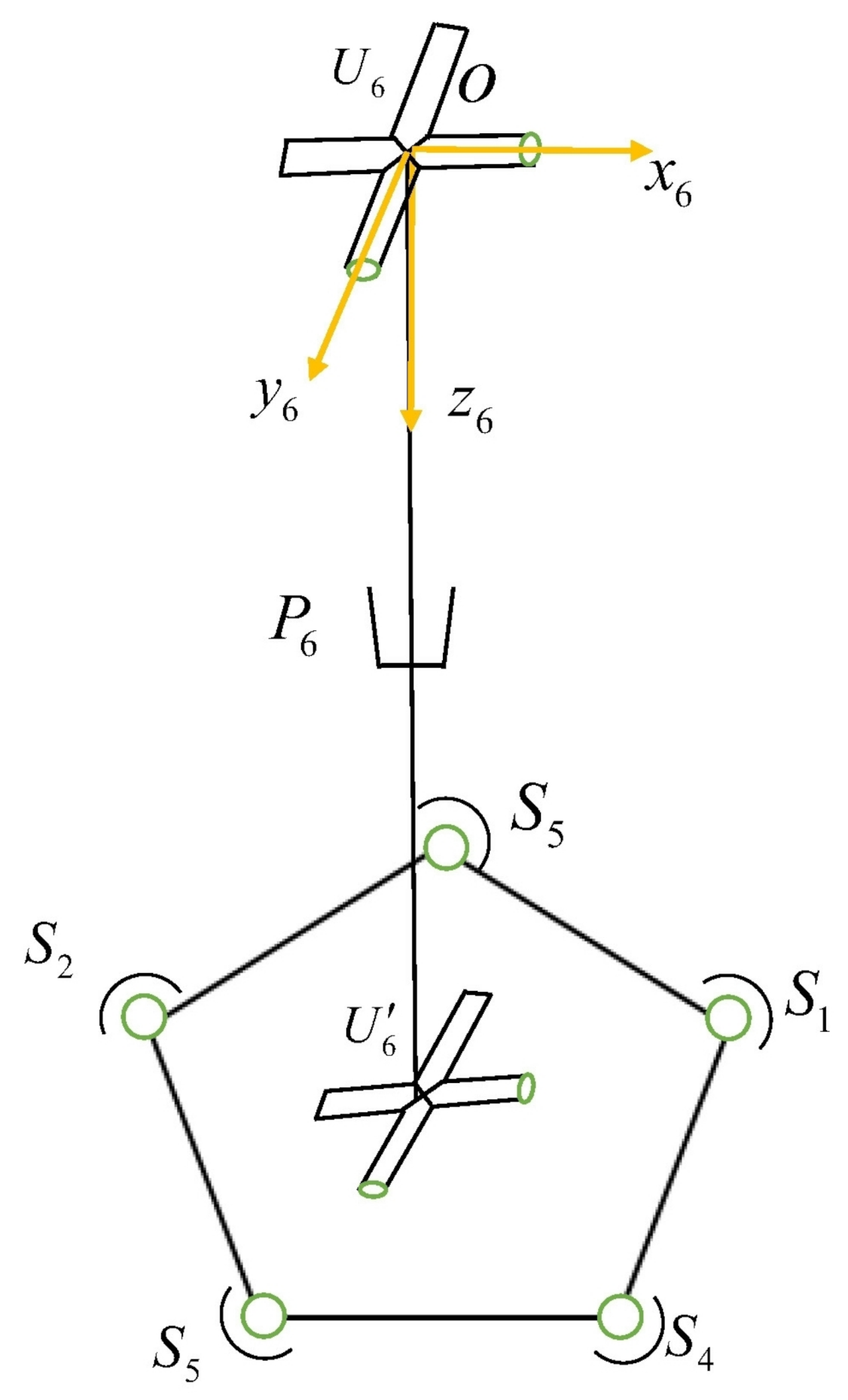
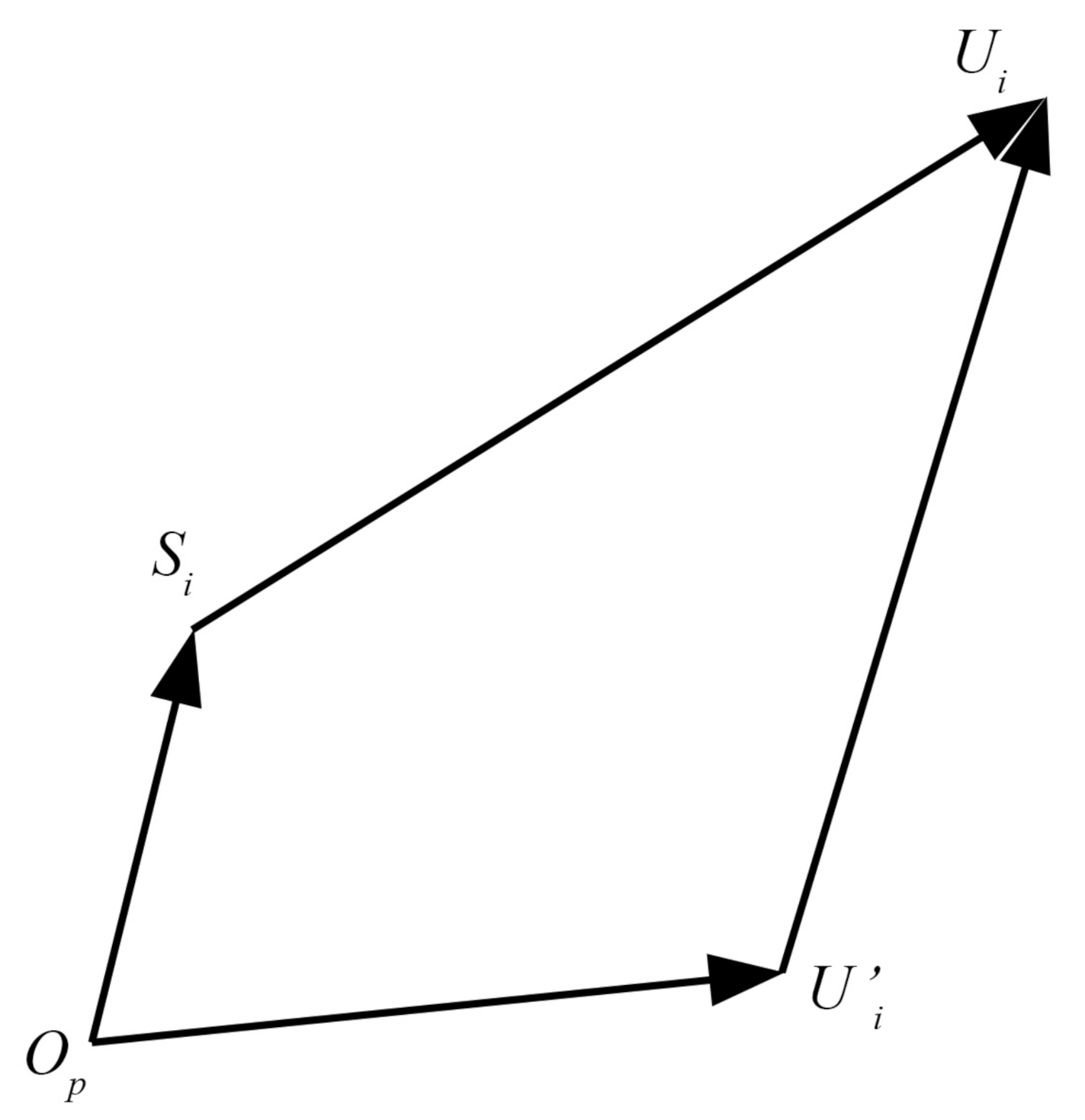
3.1. Establishment of Inverse Kinematics Equations
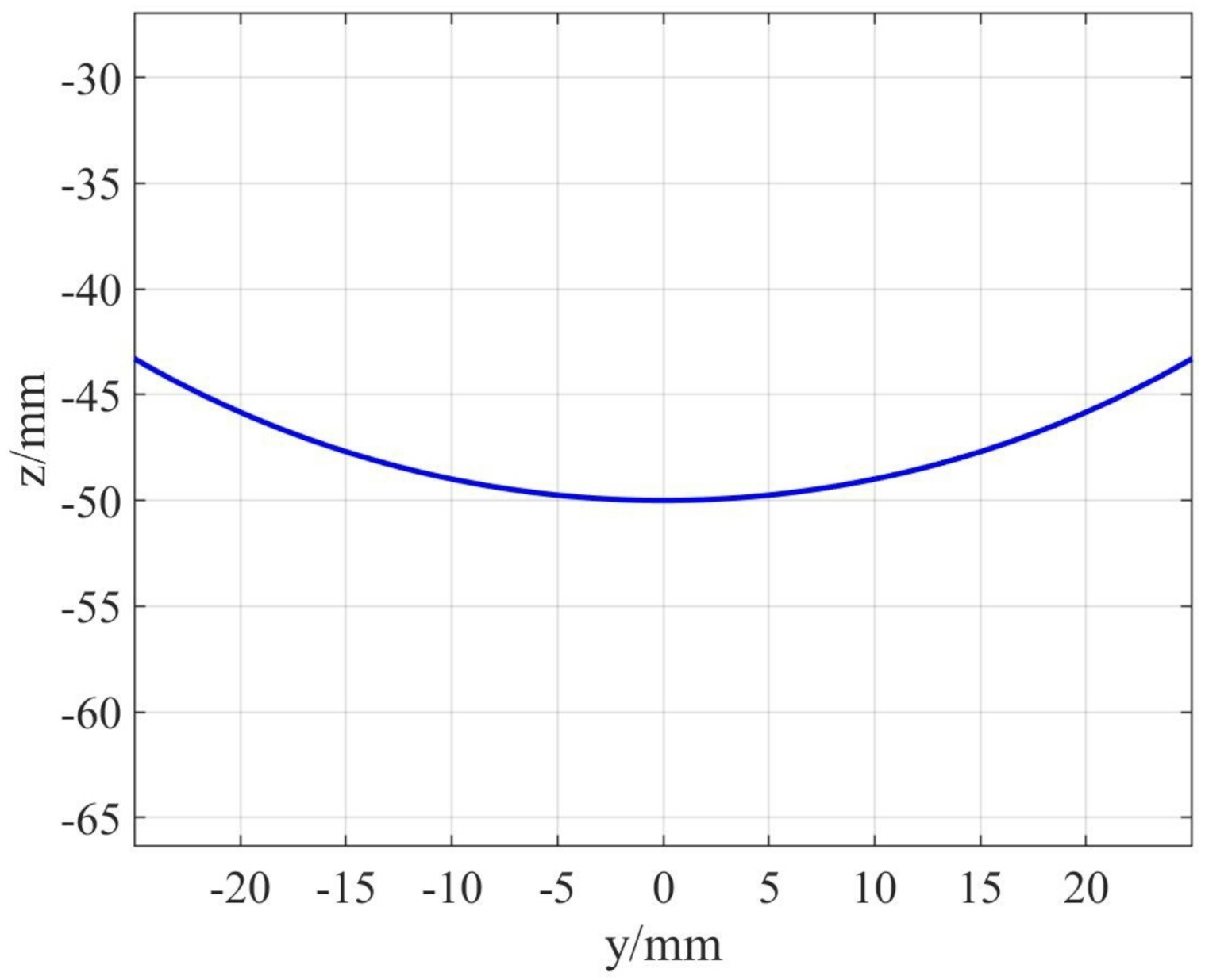
3.2. Algorithm Simulation
4. Workspace Analysis
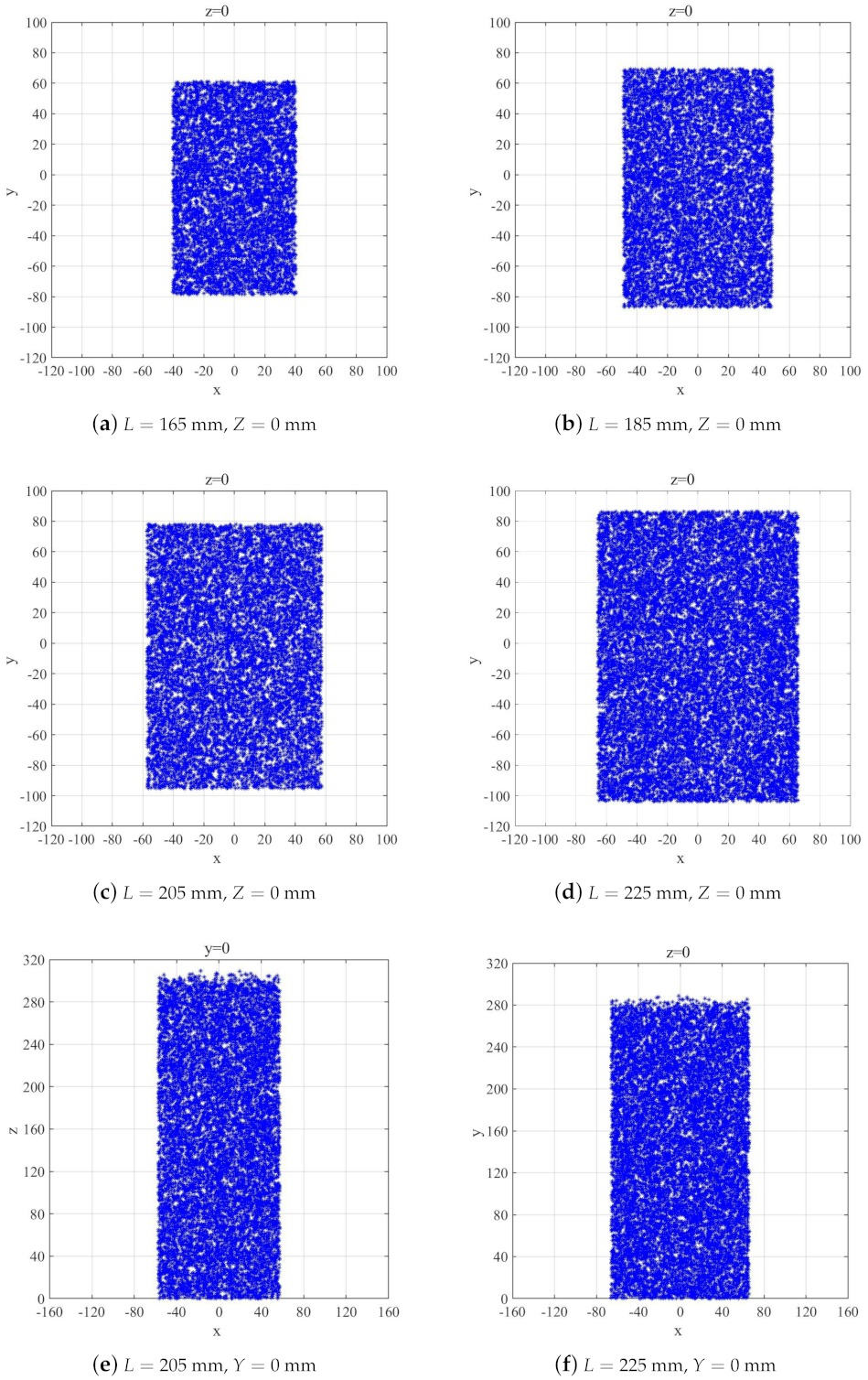
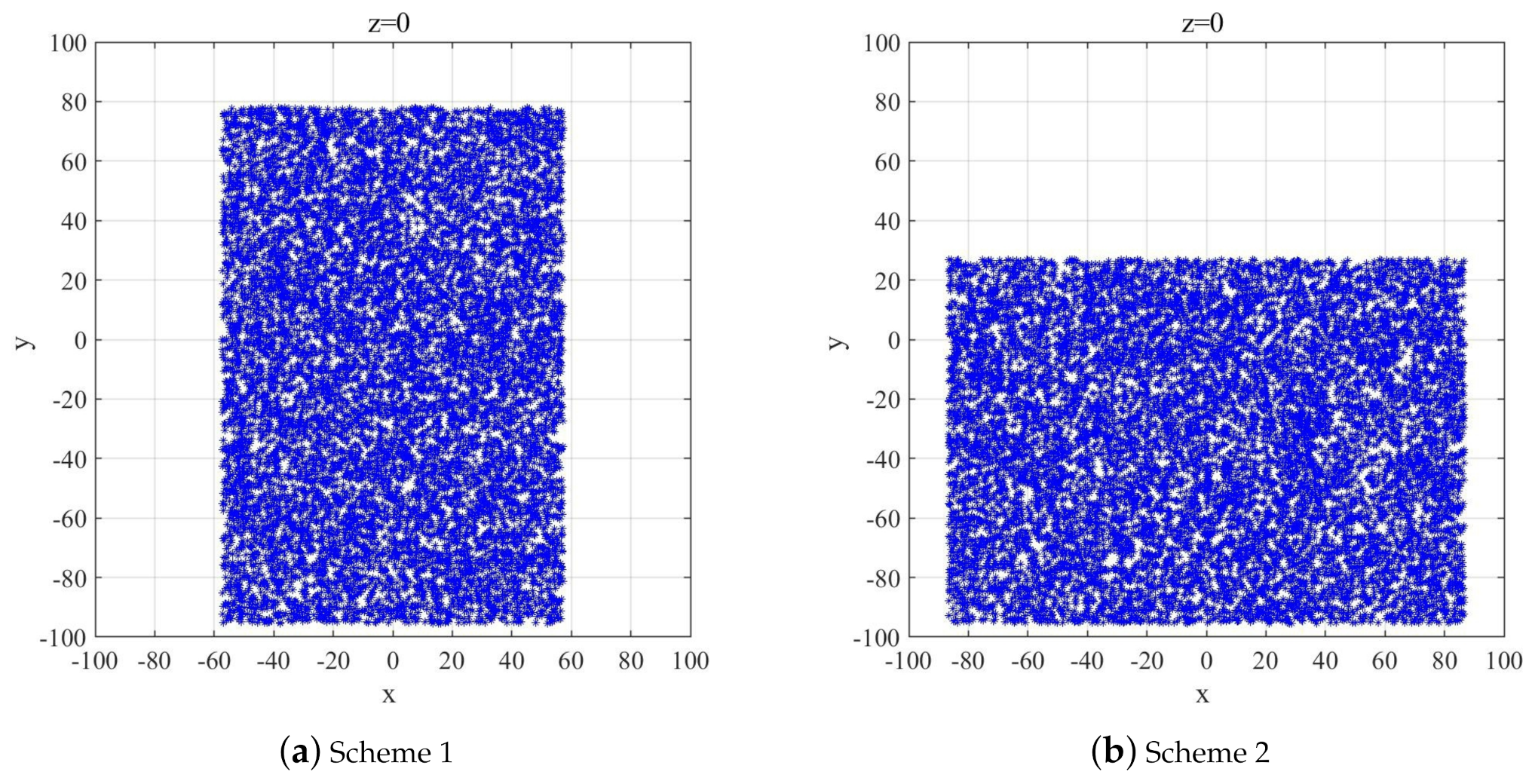
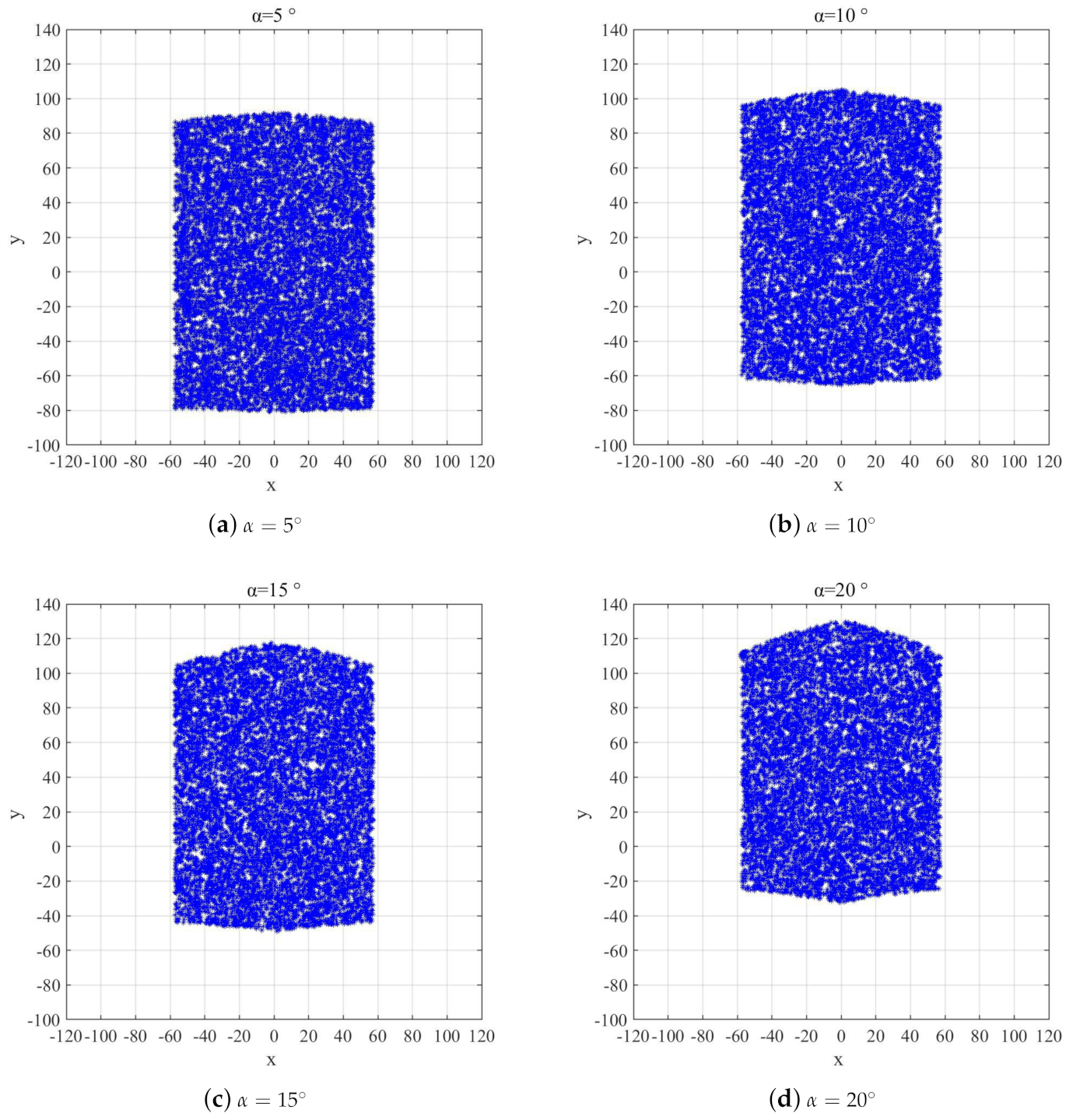
4.1. Influencing Factors of Workspace
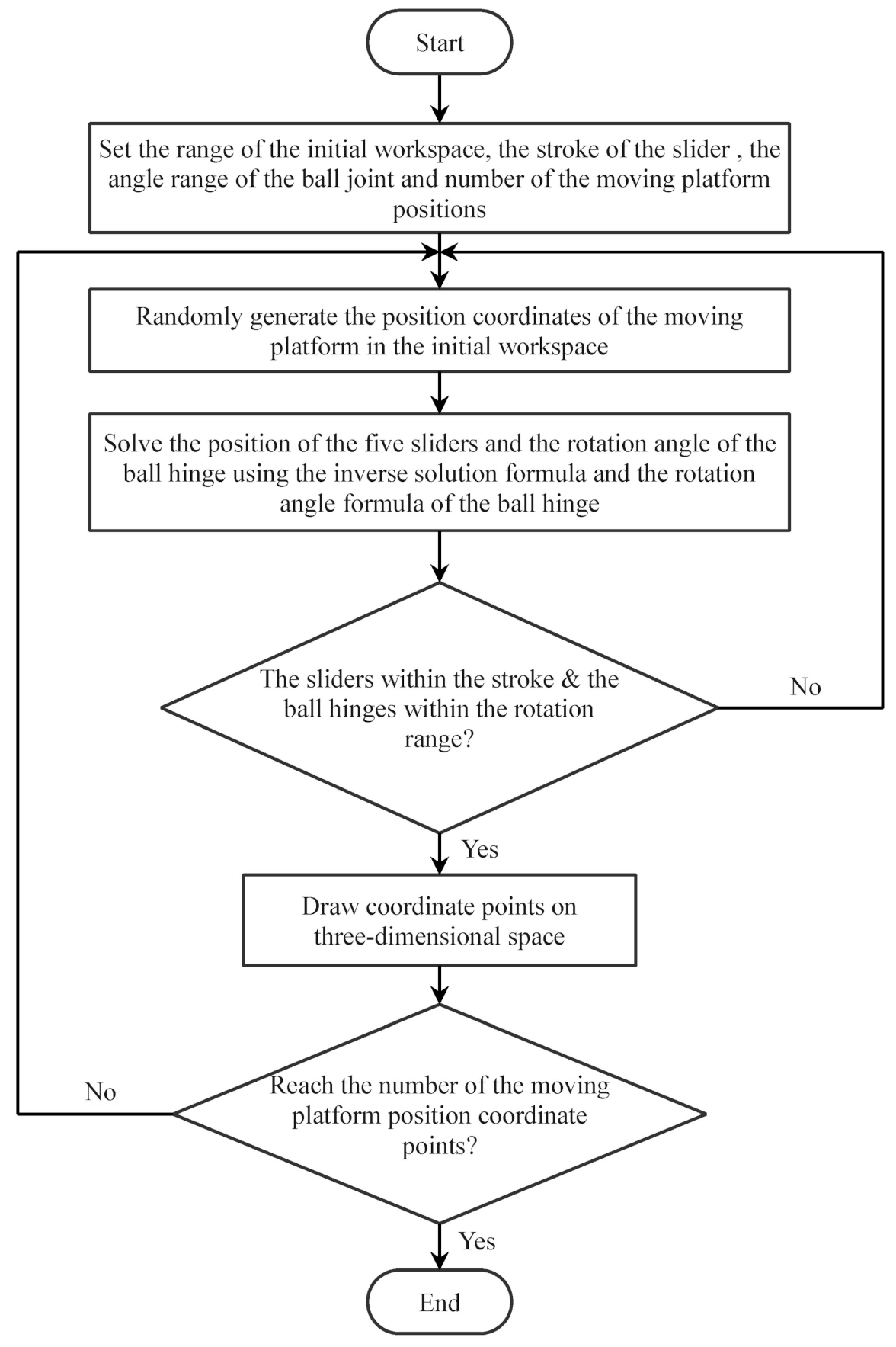
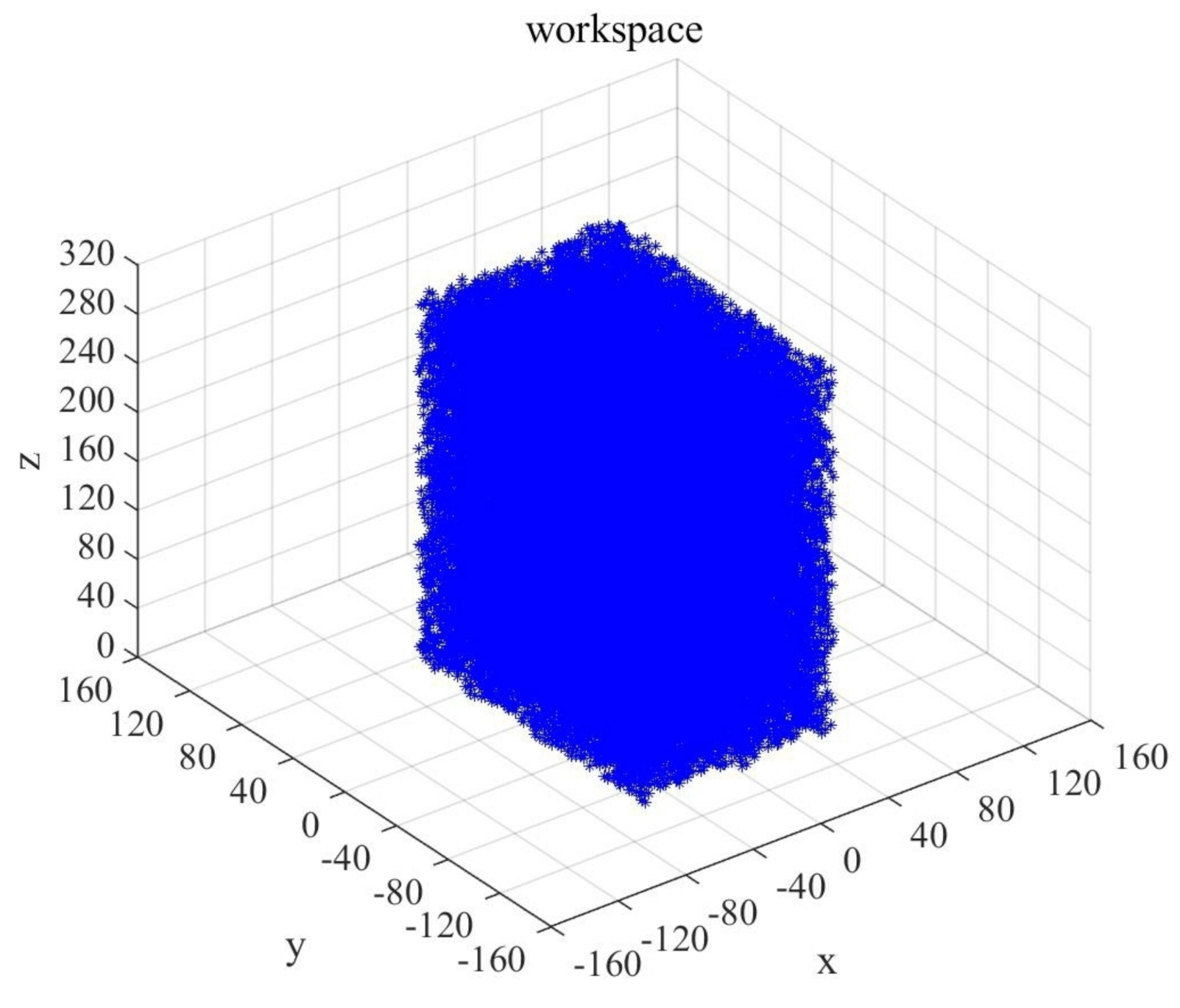
4.2. Monte Carlo Method
- The random function is used to traverse the value in the initially set workspace.
- These values are introduced into the inverse kinematics solution Equation (11) to obtain the variable values of each kinematic pair.
- Record the corresponding traverse points of each motion pair in the workspace. These recorded traverse points are the points that the geometric center of the moving platform can reach, and finally constitute the three-dimensional point cloud map of the workspace.
4.3. Algorithm Simulation of Optimal Workspace
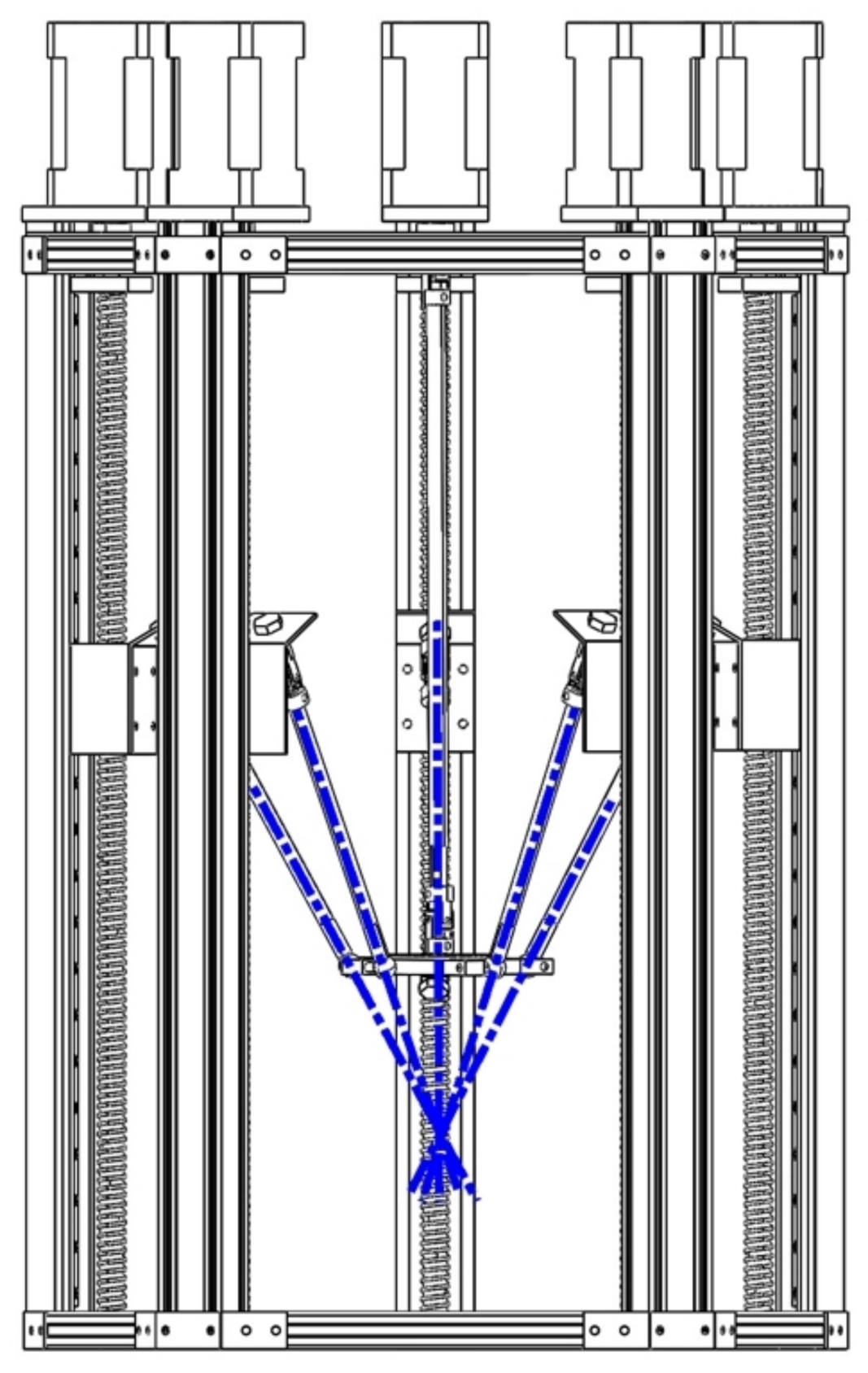
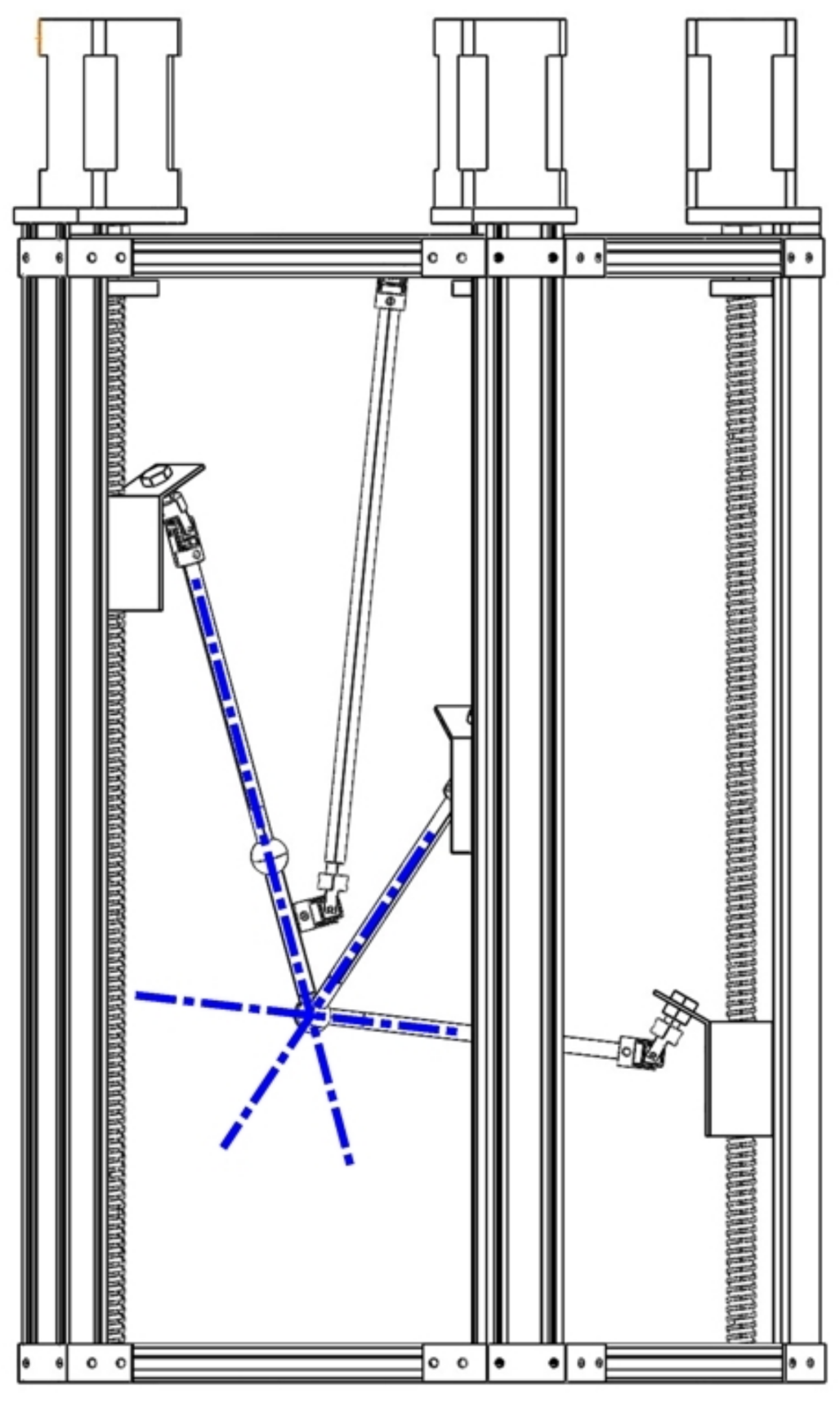
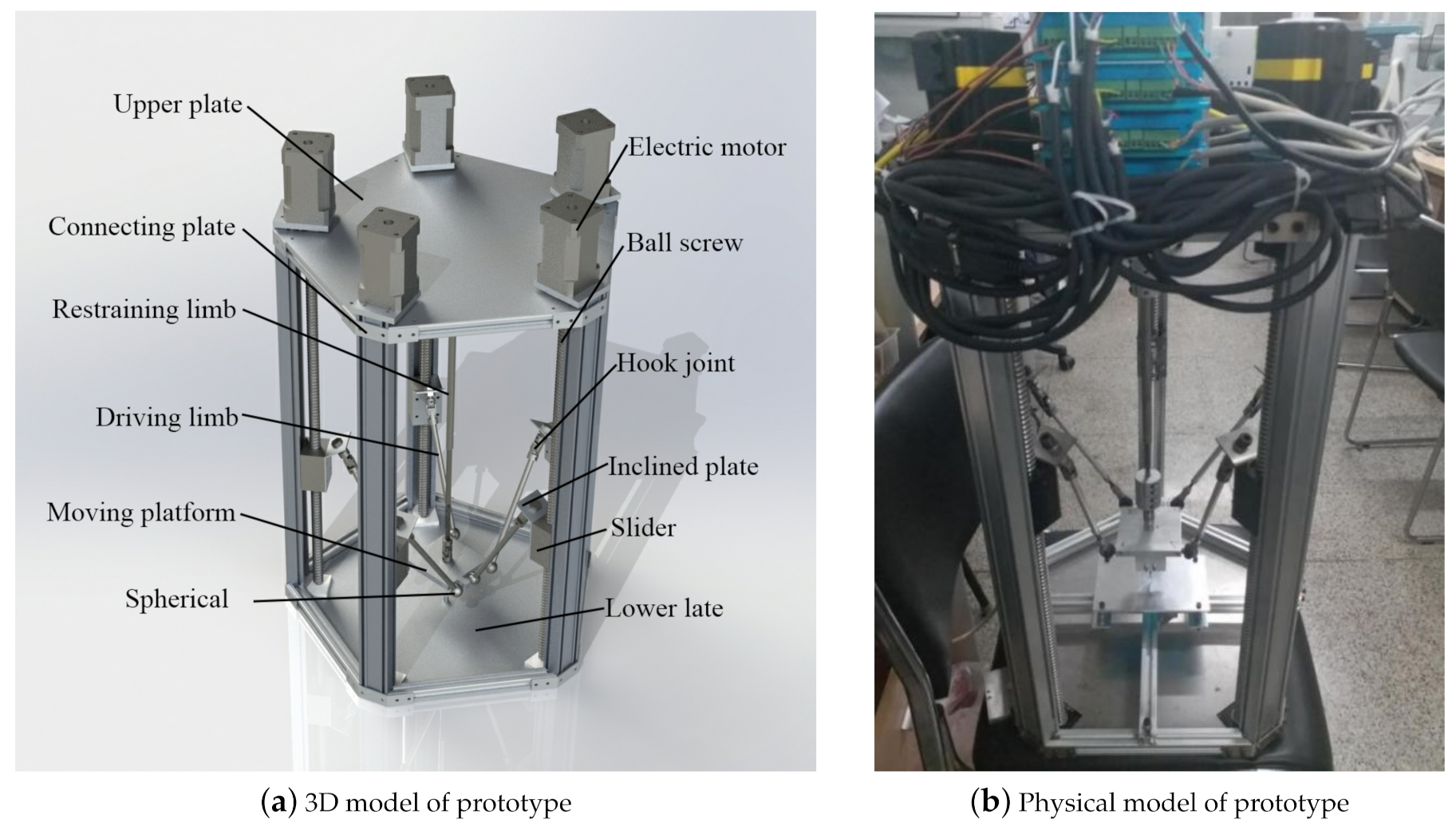
5. Experiment
6. Conclusions
- (1)
- In this paper, based on the requirement of multi-dimensional 3D printing, two 5PUS-UPU parallel mechanisms with five degrees of freedom are designed, and their degrees of freedom are analyzed by using Grubler–Kutzbach and the screw theory. Based on the singularity analysis, the optimal scheme was determined in the two schemes.
- (2)
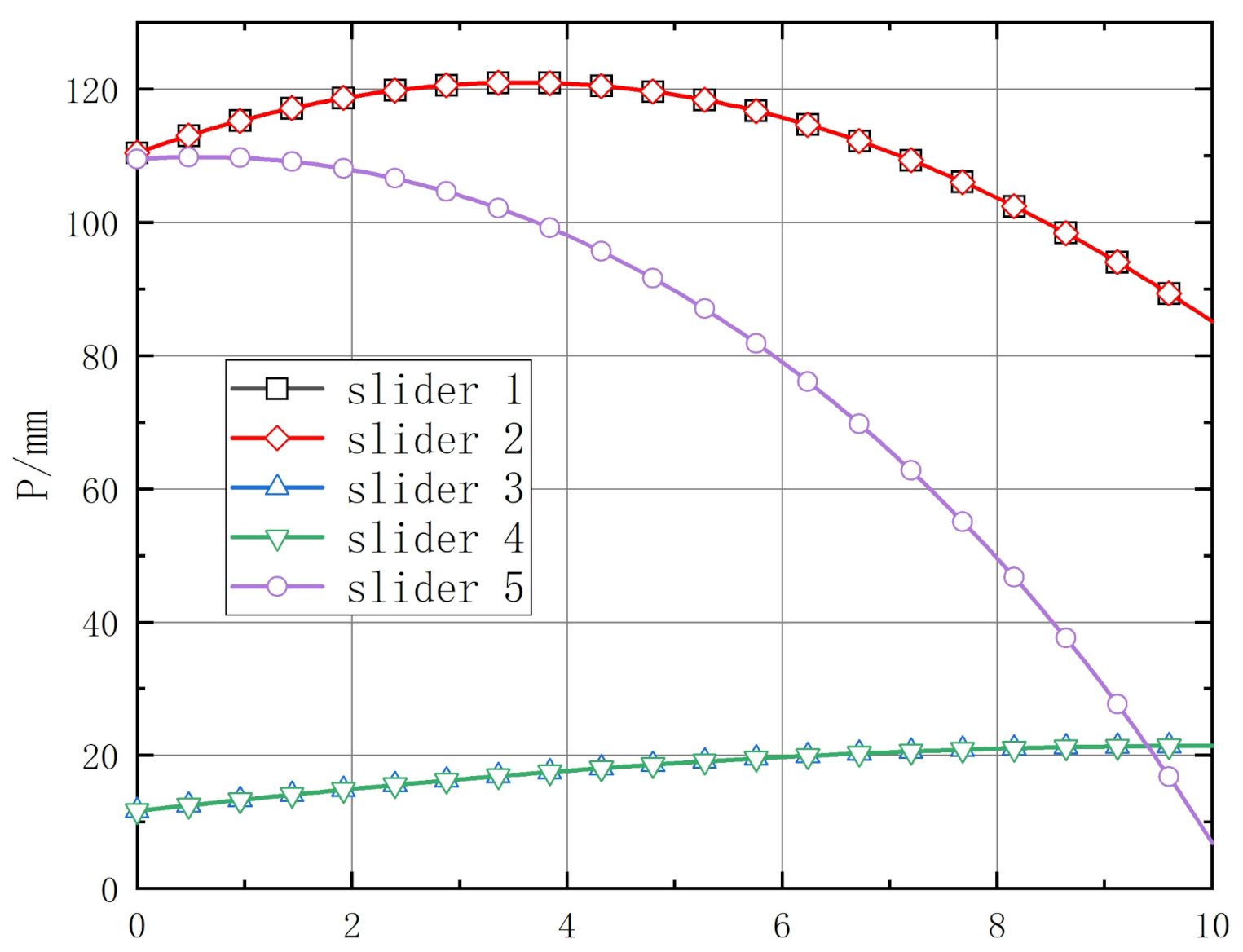
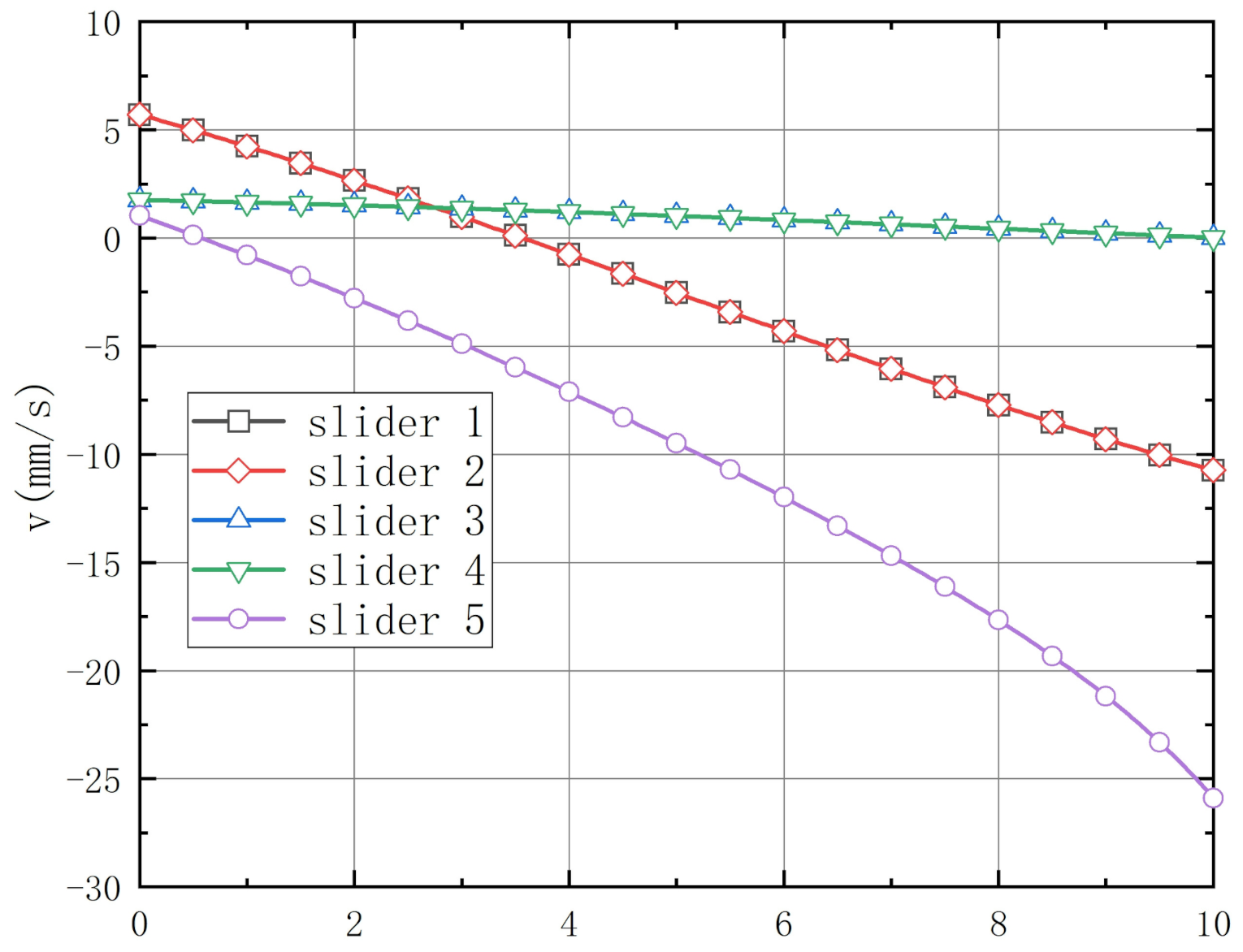
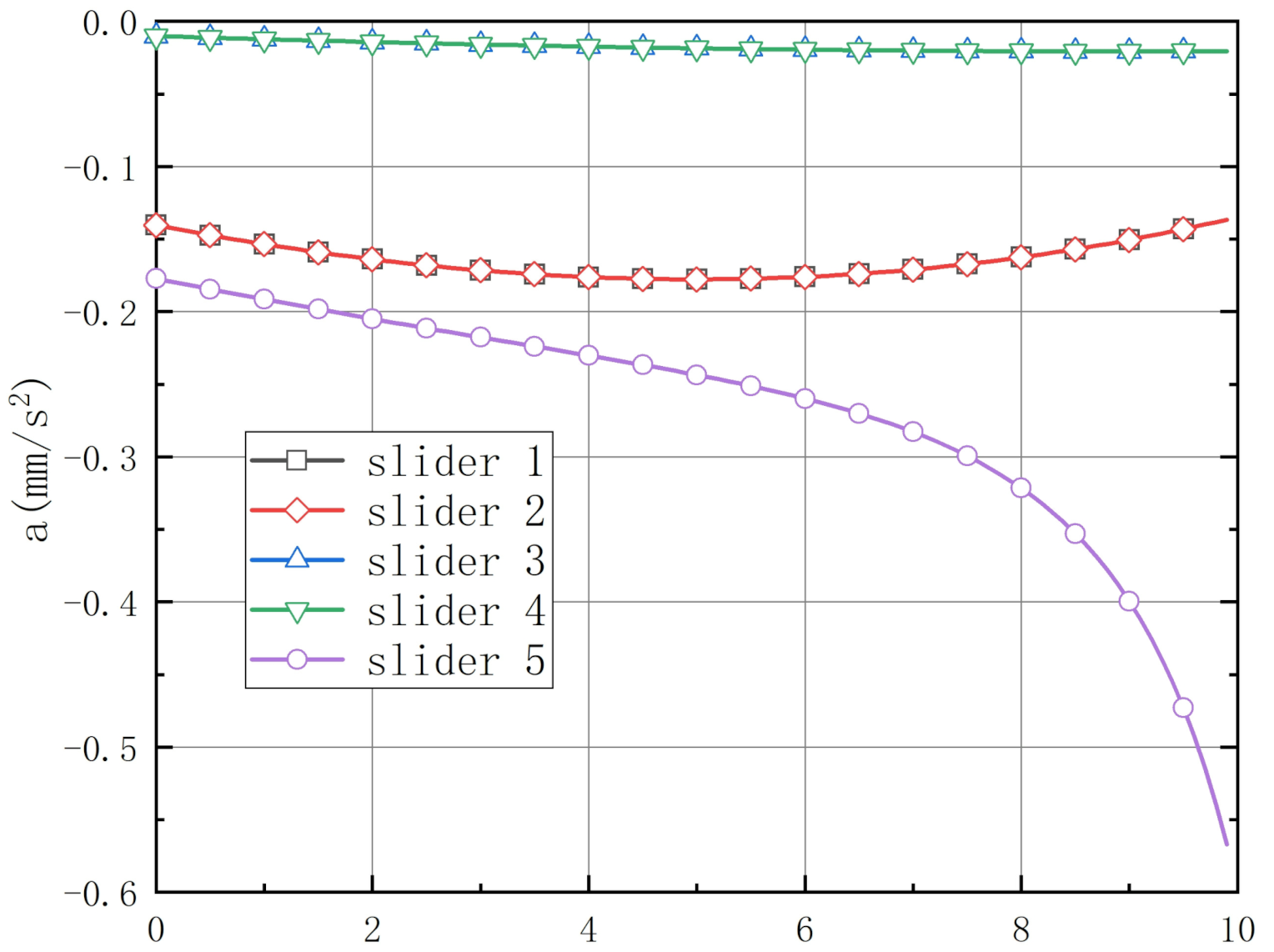
- The coordinate system and coordinate transformation matrix are established for the optimal scheme. Based on the idea of inverse kinematics solution, the inverse position equation is established. The working condition that can reflect the 5-DOF movement of the mechanism is designed, and the position analysis, speed analysis, and acceleration analysis of the working condition are carried out.
- (3)
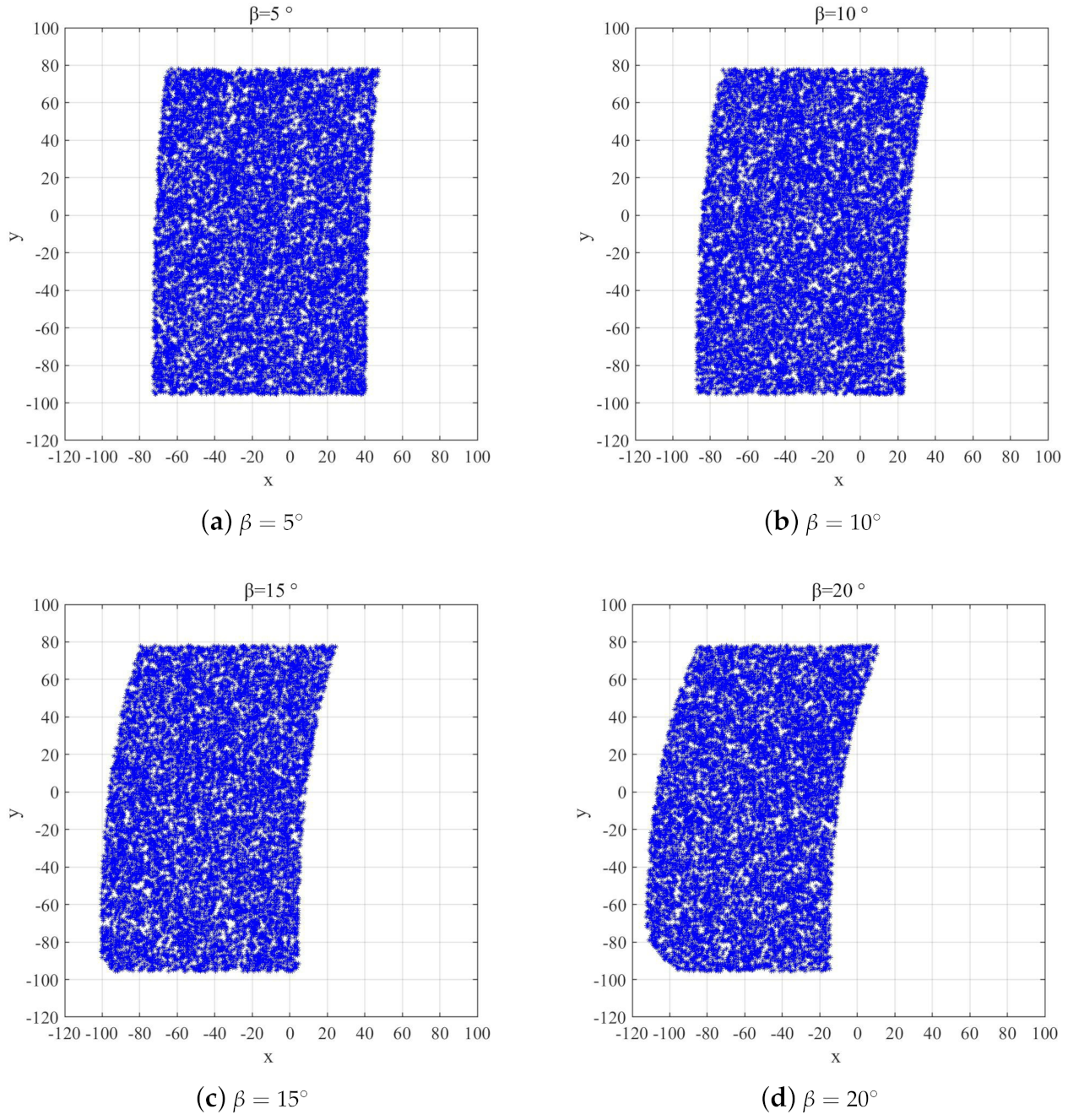
- Monte Carlo method is applied to analyze the workspace of the mechanism and to study the influencing factors of the workspace. Among the many influencing factors in the workspace, two factors are chosen: the length of the link and the position of the spherical hinge. The mechanism is optimized to obtain the optimal link length of 205 mm and the optimal position of the spherical hinge. It is concluded that the workspace size is 120 mm × 175 mm × 300 mm when the fixed posture is and , and 80 mm × 150 mm × 300 mm when and are within .
- (4)
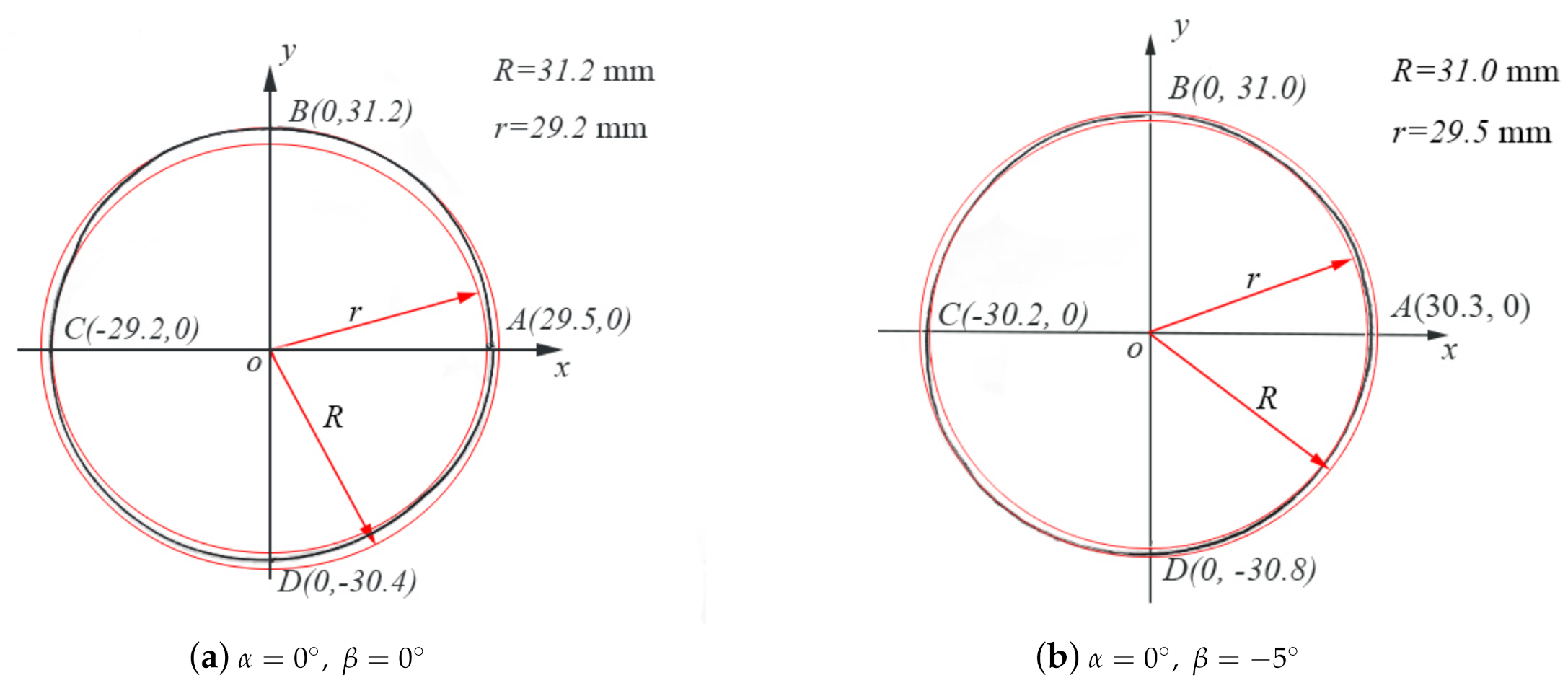
- Design the experiment, set the posture angle of the moving platform in and , use a pencil replace the printing nozzle to draw a circle. By drawing the circular trajectory, it can be concluded that the mechanism meets the design requirements for the freedom of three-dimensional movement and two-dimensional rotation.
- (5)
- In the experimental analysis, although the experimental results basically meet the design requirements, the kinematic accuracy of the mechanism is low due to the gap of hook joint and spherical hinge and the error of connecting link length. Therefore, how to further improve the motion accuracy of the mechanism will be the focus of the next work.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Tian, Y.; Gao, F. A novel six-legged walking machine tool for in-situ operations. Front. Mech. Eng. 2020, 15, 351–364. [Google Scholar] [CrossRef]
- Zhang, D.S.; Xu, Y.D.; Yao, J.T.; Zhao, Y.S. Analysis and Optimization of a Spatial Parallel Mechanism for a New 5-DOF Hybrid Serial-Parallel Manipulator. Chin. J. Mech. Eng. 2018, 31, 54. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K.; Mao, D.; Tao, Z. Kinematic Analysis and Application Research on a High-Speed Travelling Double Four-Rod Spatial Parallel Mechanism. Int. J. Adv. Manuf. Technol. 2002, 19, 873–878. [Google Scholar] [CrossRef]
- Lu, S.; Li, Y.; Ding, B. Kinematics and dynamics analysis of the 3PUS-PRU parallel mechanism module designed for a novel 6-DOF gantry hybrid machine tool. J. Mech. Sci. Technol. 2020, 34, 345–357. [Google Scholar] [CrossRef]
- Pakzad, S.; Akhbari, S.; Mahboubkhah, M. Kinematic and dynamic analyses of a novel 4-DOF parallel mechanism. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 561. [Google Scholar] [CrossRef]
- Zhang, G.; Guo, J.; Hou, Y.; Zeng, D. Analysis of the PU-2UPS antenna parallel mechanism. J. Mech. Sci. Technol. 2021, 35, 717–728. [Google Scholar] [CrossRef]
- Lim, H.; Lee, S.H.; So, B.R.; Yi, B.J. Design of a new 6-DOF parallel mechanism with a suspended platform. Int. J. Control Autom. Syst. 2015, 13, 942–950. [Google Scholar] [CrossRef]
- Seo, T.W.; In, W.; Kim, J. A new planar 3-DOF parallel mechanism with continuous 360-degree rotational capability. J. Mech. Sci. Technol. 2009, 23, 3088–3094. [Google Scholar] [CrossRef]
- Kuo, Y.L.; Cleghorn, W.L.; Behdinan, K. Stress-based finite element method for Euler-Bernoulli beams. Trans.-Can. Soc. Mech. Eng. 2007, 30, 1–6. [Google Scholar] [CrossRef]
- Taghirad, H.D. Parallel Robots: Mechanics and Control; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review—ScienceDirect. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Kurazume, R.; Hasegawa, T. A new index of serial-link manipulator performance combining dynamic manipulability and manipulating force ellipsoids. IEEE Trans. Robot. 2006, 22, 1022–1028. [Google Scholar] [CrossRef]
- Wang, L.; Fang, Y.; Qu, H.; Li, L. Design and analysis of novel 2R1T generalized parallel mechanisms with large rotational angles. Mech. Mach. Theory 2020, 150, 103879. [Google Scholar] [CrossRef]
- Yar, A.; Kiper, G.; Dede, M.C. Kinematic design of a non-parasitic 2R1T parallel mechanism with remote center of motion to be used in minimally invasive surgery applications. Mech. Mach. Theory 2020, 153, 104013. [Google Scholar] [CrossRef]
- Liping, W.; Huayang, X.; Liwen, G.; Yu, Z. A novel 3-PUU parallel mechanism and its kinematic issues. Robot. Comput. Integr. Manuf. 2016, 42, 86–102. [Google Scholar] [CrossRef]
- Du, X.; Li, Y.; Wang, P.; Ma, Z.; Wu, C.Y. Design and optimization of solar tracker with U-PRU-PUS parallel mechanism. Mech. Mach. Theory 2021, 155, 104107. [Google Scholar] [CrossRef]
- Chen, Z.; Li, M.; Kong, X.; Zhao, C. Kinematics analysis of a novel 2R1T 3-PUU parallel mechanism with multiple rotation centers. Mech. Mach. Theory 2020, 152, 103938. [Google Scholar] [CrossRef]
- Russo, M.; Herrero, S.; Altuzarra, O.; Ceccarelli, M. Kinematic analysis and multi-objective optimization of a 3-UPR parallel mechanism for a robotic leg. Mech. Mach. Theory 2018, 120, 192–202. [Google Scholar] [CrossRef]
- Br, G.F.; Wei, G. Kinematic analysis of a pentapod robot. J. Geom. Graph. 2006, 10, 173–182. [Google Scholar]
- Chen, X.; Liang, X.; Deng, Y.; Wang, Q. Rigid Dynamic Model and Analysis of 5-DOF Parallel Mechanism. Int. J. Adv. Robot. Syst. 2015, 12, 108. [Google Scholar] [CrossRef] [Green Version]
- Piccin, O.; Bayle, B.; Maurin, B.; Mathelin, M.D. Kinematic modeling of a 5-DOF parallel mechanism for semi-spherical workspace. Mech. Mach. Theory 2009, 44, 1485–1496. [Google Scholar] [CrossRef]
- Wang, J.; Gosselin, C.M. Singularity Loci of a Special Class of Spherical 3-DOF Parallel Mechanisms With Prismatic Actuators. Asme J. Mech. Des. 2004, 126, 319–326. [Google Scholar] [CrossRef]
- Gallardo-Alvarado, J.; Rico-Martínez, J.M.; Alici, G. Kinematics and singularity analyses of a 4-dof parallel manipulator using screw theory. Mech. Mach. Theory 2006, 41, 1048–1061. [Google Scholar] [CrossRef]
- Guo, S.; Wang, C.; Qu, H.; Fang, Y. A novel 4-RRCR parallel mechanism based on screw theory and its kinematics analysis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Ence 2013, 227, 2039–2048. [Google Scholar] [CrossRef]
- Thomas, M.J.; Joy, M.L.; Sudheer, A.P. Kinematic and Dynamic Analysis of a 3-PRUS Spatial Parallel Manipulator. Chin. J. Mech. Eng. 2020, 33, 13. [Google Scholar] [CrossRef] [Green Version]
- Wolf, A.; Ottaviano, E.; Shoham, M.; Ceccarelli, M. Application of line geometry and linear complex approximation to singularity analysis of the 3-DOF CaPaMan parallel manipulator. Mech. Mach. Theory 2004, 39, 75–95. [Google Scholar] [CrossRef]
- Tian, C.; Fang, Y.; Ge, Q. Design and analysis of a partially decoupled generalized parallel mechanism for 3T1R motion. Mech. Mach. Theory 2019, 140, 211–232. [Google Scholar] [CrossRef]
- Tao, Z.; An, Q. Interference analysis and workspace optimization of 3-RRR spherical parallel mechanism. Mech. Mach. Theory 2013, 69, 62–72. [Google Scholar] [CrossRef]
- Wang, L.; Xu, H.; Guan, L. Optimal design of a 3-PUU parallel mechanism with 2R1T DOFs. Mech. Mach. Theory 2017, 114, 190–203. [Google Scholar] [CrossRef]
- Bai, Z.; Han, X.; Chen, W. Optimal design of parallel mechanisms with large tilting ability based on redundant actuation. J. Beijing Univ. Aeronaut. Astronaut. 2006, 7, 856–859. [Google Scholar]
- Stewart, D. A Platform with Six Degrees of Freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Ye, Z.; Zhihui, H.; Liping, T. Research on Structure Synthesis of Five Degrees of Freedoms Hybrid Mechanisms. Mach. Tool Hydraul. 2016, 44, 43–48. [Google Scholar]
- Zhou, Y.; Niu, J. Coordinates-reduction Method of Parallel Mechanism based on Screw Theory. Mech. Sci. Technol. Aerosp. Eng. 2017, 1–5. [Google Scholar]
- Huang, Z. Theory and Control of Parallel Robot Mechanism; China Machine Press: Beijing, China, 1997. [Google Scholar]
- Yan, W. Dynamics Analysis of A Novel Re-Configurable Double-Tripod Hybrid Robot. Ph.D. Thesis, East China Jiaotong University, Nanchang, China, 2011. [Google Scholar]
- Cheng, G.; Gu, W.; Jiang, S. Singularity Analysis of a Parallel Hip Joint Simulator Based on Grassmann Line Geometry. J. Mech. Eng. 2012, 48, 29–37. [Google Scholar] [CrossRef]
- Li, S.; Liu, M.; Zhang, Y. Research on Screw System Dependency under Different Space Geometrical Conditions. China Mech. Eng. 2007, 18, 655–658. [Google Scholar]
- Cao, Y. On Singular Configurations of Six Degrees of Freedom of Parallel Manipulators. Ph.D. Thesis, Yanshan University, Qinhuangdao, China, 2006. [Google Scholar]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Lyu, C.; Liu, J. Kinematic Analysis and Verification of a New 5-DOF Parallel Mechanism. Appl. Sci. 2021, 11, 8157. https://doi.org/10.3390/app11178157
Wang Y, Lyu C, Liu J. Kinematic Analysis and Verification of a New 5-DOF Parallel Mechanism. Applied Sciences. 2021; 11(17):8157. https://doi.org/10.3390/app11178157
Chicago/Turabian StyleWang, Yesong, Changhuai Lyu, and Jiang Liu. 2021. "Kinematic Analysis and Verification of a New 5-DOF Parallel Mechanism" Applied Sciences 11, no. 17: 8157. https://doi.org/10.3390/app11178157
APA StyleWang, Y., Lyu, C., & Liu, J. (2021). Kinematic Analysis and Verification of a New 5-DOF Parallel Mechanism. Applied Sciences, 11(17), 8157. https://doi.org/10.3390/app11178157