
A Cutting Pattern Recognition Method for Shearers Based on ICEEMDAN and Improved Grey Wolf Optimizer Algorithm-Optimized SVM


Abstract
:1. Introduction
2. Feature Extraction of Cutting Sound Signal
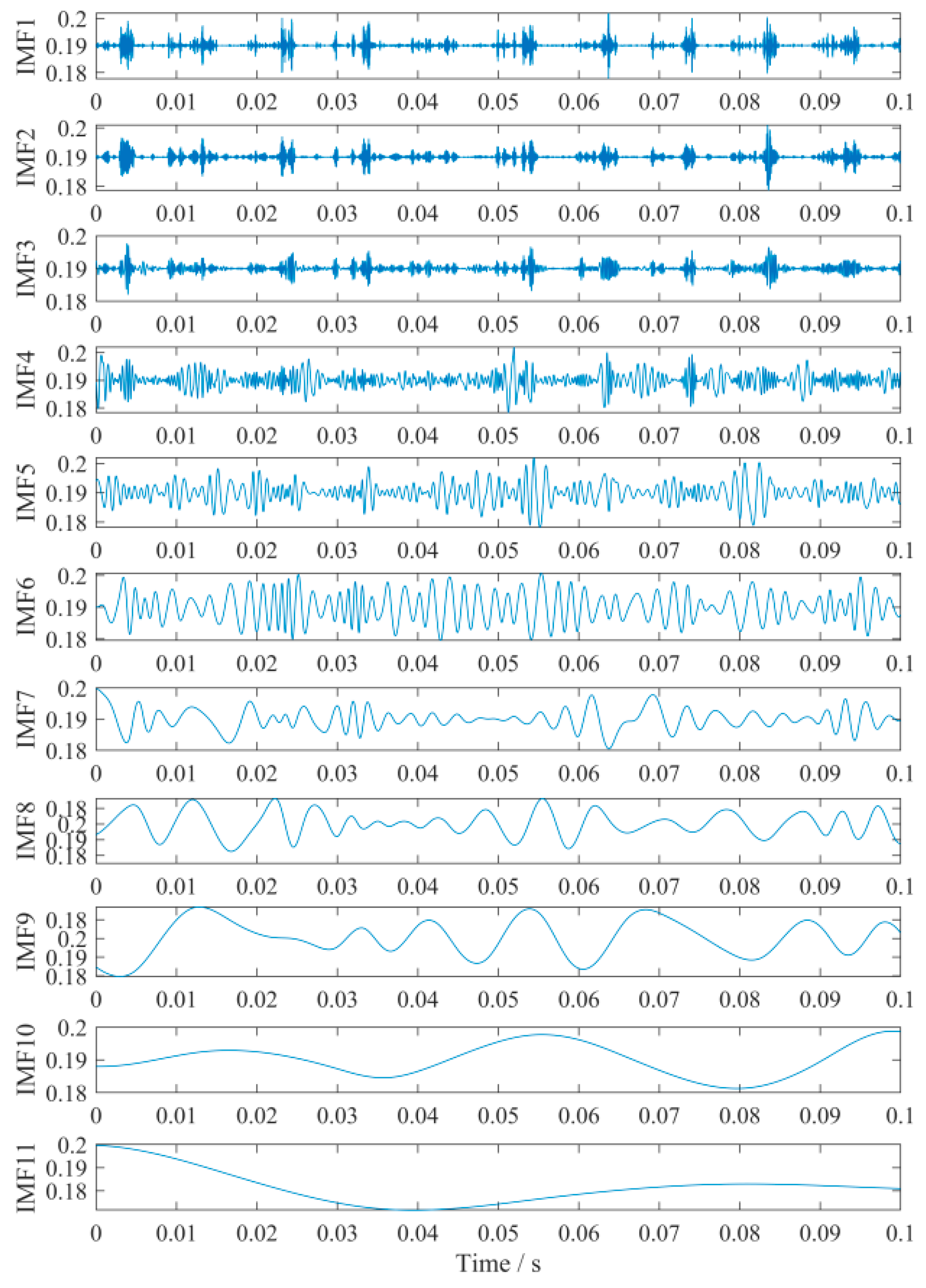
2.1. ICEEMDAN Algorithm Principle
- (1)
- There is the original signal y, add noise and build the signal as:
- (2)
- When k = 1, calculate the value IMF1 of the first IMF component.
- (3)
- When k = 2, calculate the value IMF2 of the second IMF component.
- (4)
- Similarly, calculate the value IMFk of the k-th IMF component.
- (5)
- Repeat step 4 until the decomposition is complete.
2.2. Correlation Coefficient Selection Principle
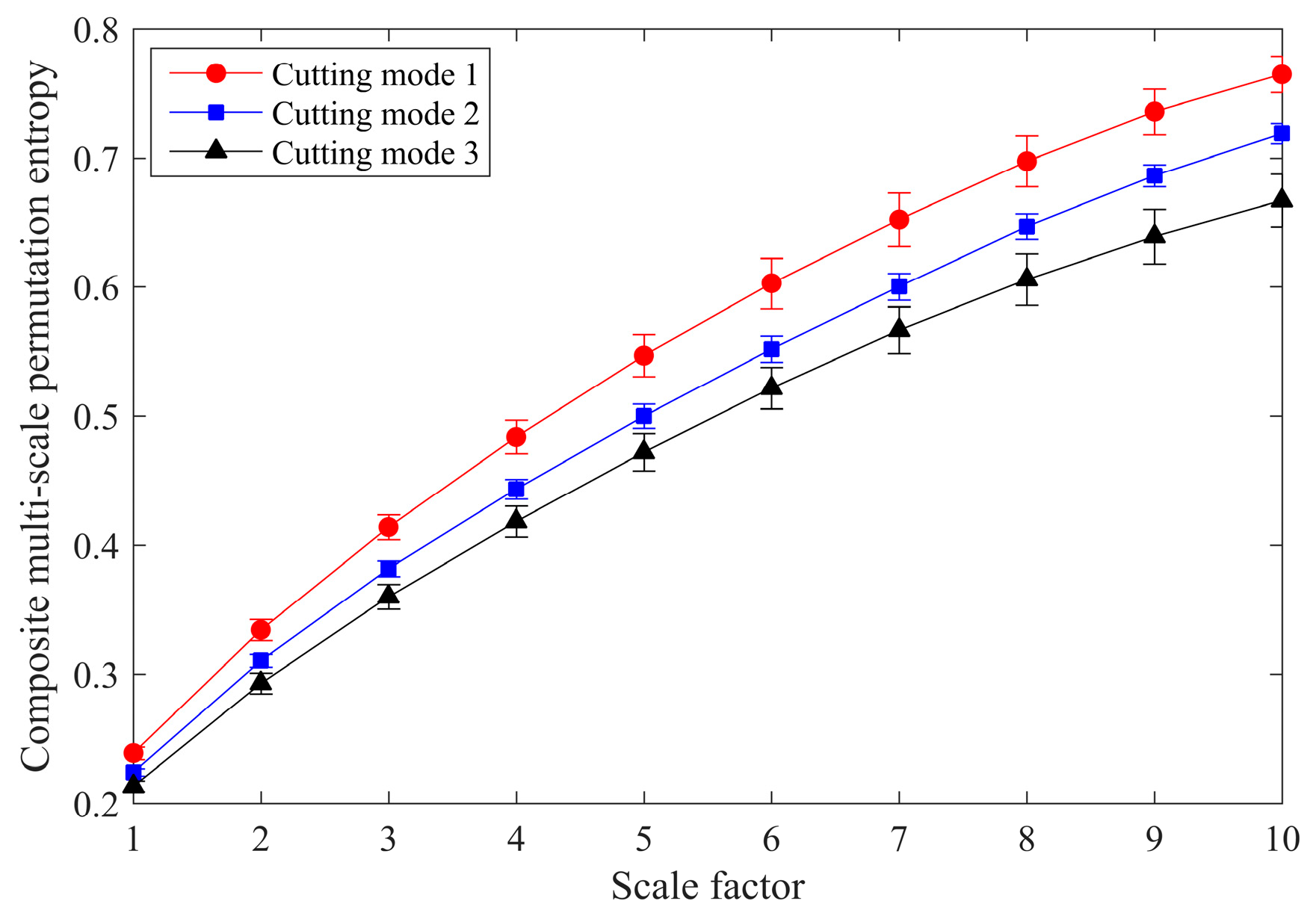
2.3. Composite Multi-Scale Permutation Entropy
- (1)
- According to the formula (9), the original time series {y(i), i = 1, 2, …, N} is coarse-grained to obtain the coarse-grained sequence .
- (2)
- Calculate the permutation entropy of τ coarse-grained sequences according to the scale factor τ.
- (3)
- Calculate the mean value of the permutation entropy of τ coarse-grained sequences, and obtain the CMPE as:
3. Improved Grey Wolf Optimizer Algorithm to Optimize Support Vector Machine
3.1. Support Vector Machine
3.2. Grey Wolf Optimizer
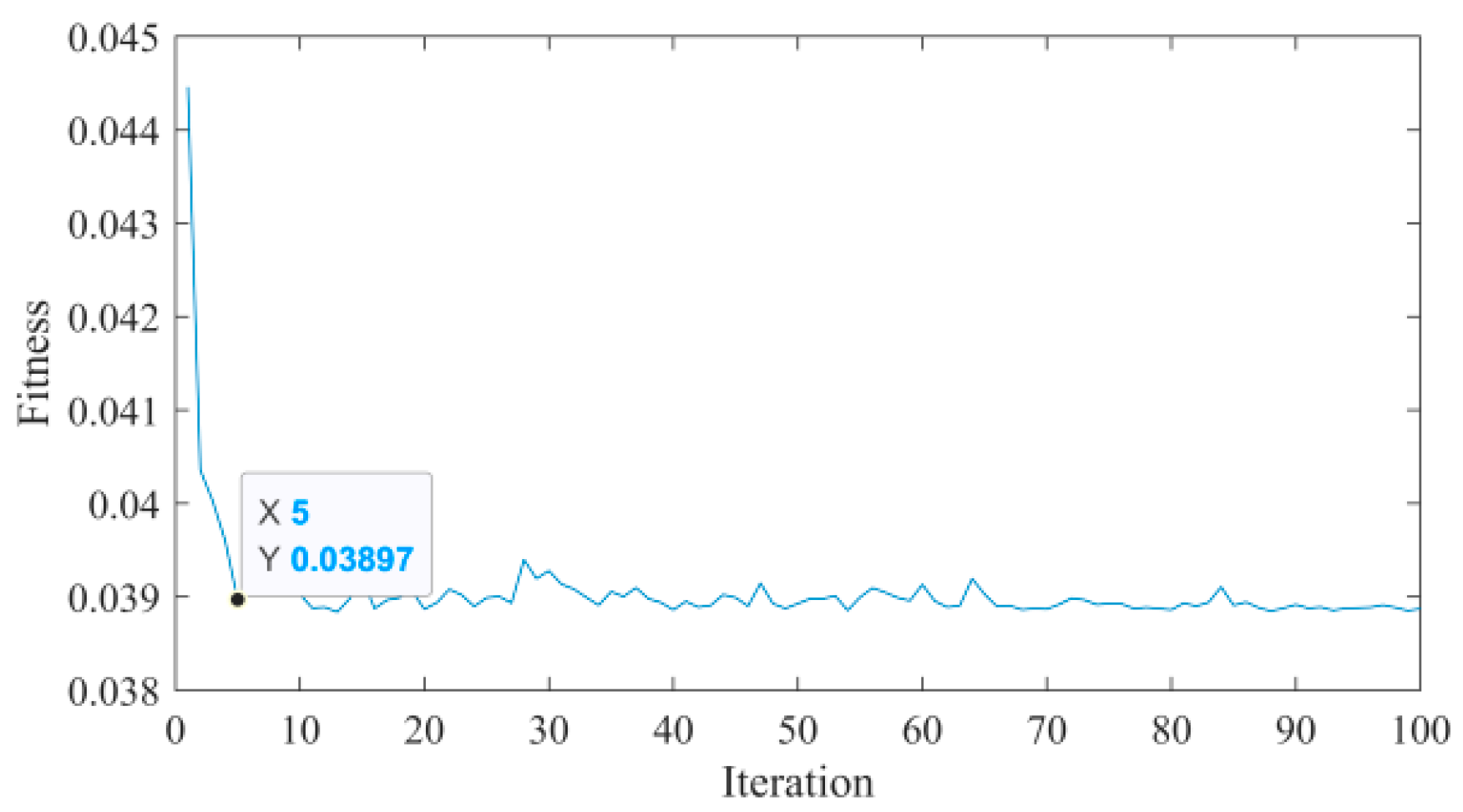
3.3. Improved GWO Algorithm
- (1)
- Set the initial scale and related parameters of the IGWO algorithm, and initialize the parameters of the SVM model [c, g].
- (2)
- Randomly initialize the parent, mutation, and offspring gray wolf populations, and determine the α, β and δ wolves in the parent grey wolf population.
- (3)
- Update the parent population, generate mutations and offspring grey wolf populations, and perform crossover operations.
- (4)
- Compare the fitness value of the parent population and the offspring variant population. If the offspring population is preferable, replace the parent population fitness value and update the parent population. Otherwise, it should remain unchanged.
- (5)
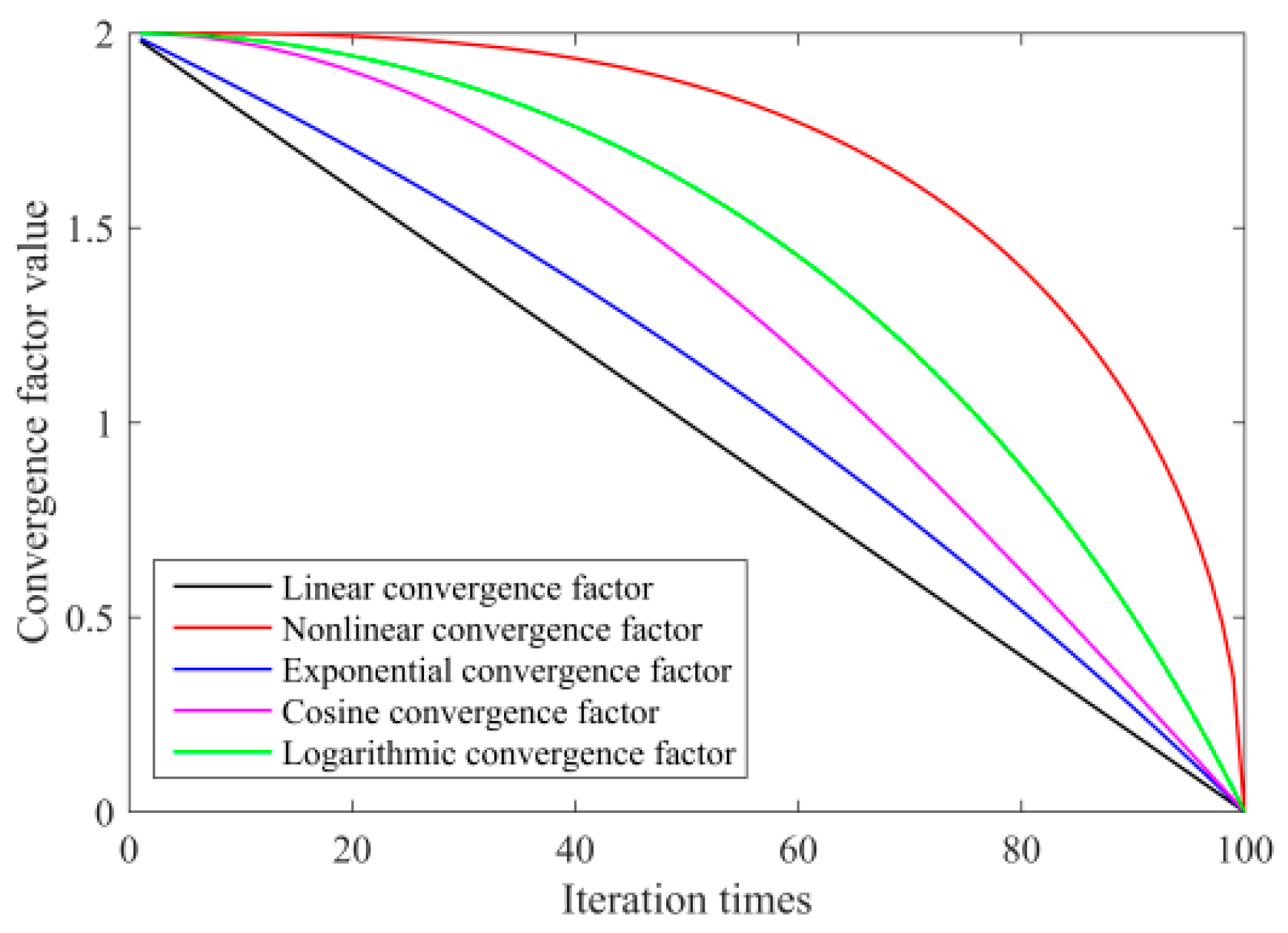
- Update a′, A, and C according to Formulas (11) and (18).
- (6)
- When the number of iterations reaches the set maximum value, terminate the iteration, and the SVM model’s optimal [c, g] parameter combination will be output. Otherwise, return to step 3 and continue the iteration.
| Algorithm 1. The pseudocode of the IGWO optimization process. |
| Initialize n, Itermax, and other parameters, |
| Initialize the location of parent population, mutant population and offspring population, and calculate the corresponding individual target fitness value, |
| Identify α, β, δ wolves in the parent population, |
| [~,sort_index] = sort (parent_wolf); |
| parent_α_Position = parent_Position (sort_index (1), :); |
| parent_α_wolf = parent_wolf (sort_index (1)); |
| parent_β_Position = parent_Position (sort_index (2), :); |
| parent_δ_Position = parent_Position (sort_index (3), :); |
| Fitness = zeros (1, Itermax); |
| Fitness (1) = parent_α_wolf; |
| for t = 1:Itermax |
| Calculate the value of the nonlinear convergence factor according to formula (24); |
| for p = 1:n |
| Update the parent individual location according to Formulas (15)–(21); |
| Calculate the fitness value of the parent individual; |
| end |
| Generate the mutant population according to Formula (22) |
| Generate the offspring population, and perform the crossover operation according to Formula (23); |
| Calculate the fitness value of new offspring; |
| for p = 1:n |
| if offspring_wolf (p) < parent_wolf (p) |
| parent_wolf (p) = offspring_wolf (p) |
| Fitnessbest = parent_wolf (p) |
| end |
| end |
| [~,sort_index] = sort (parent_wolf); |
| parent_α_Position = parent_Position (sort_index (1), :); |
| parent_α_wolf = parent_wolf (sort_index (1)); |
| parent_β_Position = parent_Position (sort_index(2), :); |
| parent_δ_Position = parent_Position (sort_index(3), :); |
| Fitness (t) = parent_α_wolf; |
| end |
| cbest = parent_α_Position (1,1); |
| gbest = parent_α_Position (1,2); |
| Postprocess the results and visualization. |
4. Establishment of the Cutting Pattern Recognition Model
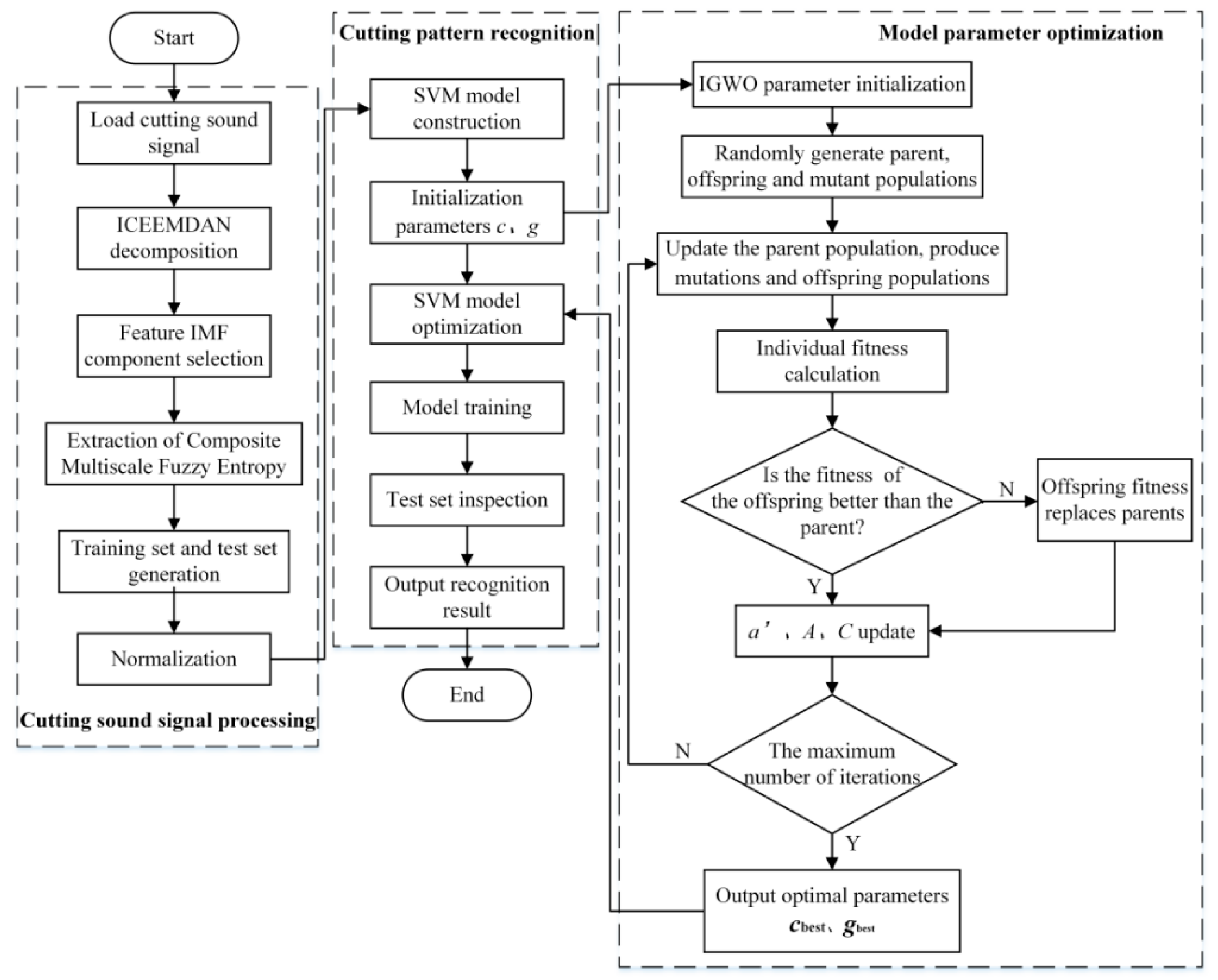
- (1)
- Sound signal processing: Aiming at the shearer cutting sound signal, it processes the signal through the ICEEMDAN method and extracts the CMPE of the IMF component as the eigenvalue.
- (2)
- Model parameter optimization: The paper initializes the parameters. Then, it uses the DE algorithm and nonlinear convergence factors to optimize the GWO algorithm and search for the optimal parameter combination of the SVM.
- (3)
- Cutting pattern recognition: The optimal parameter combination determines the SVM model, which can perform cutting pattern recognition research based on the eigenvalues.
5. Experiment and Analysis
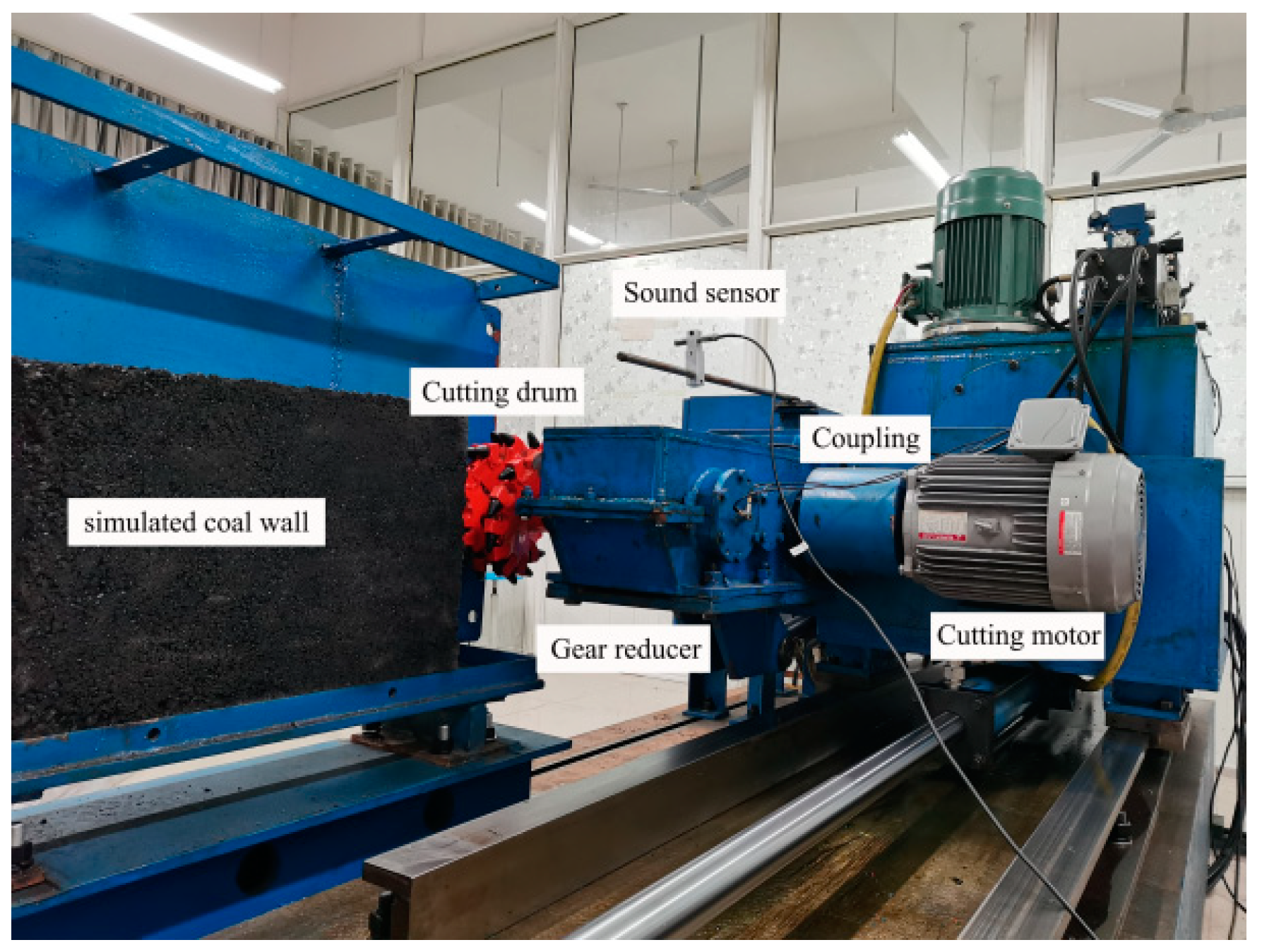
5.1. Cutting Sound Signal Acquisition
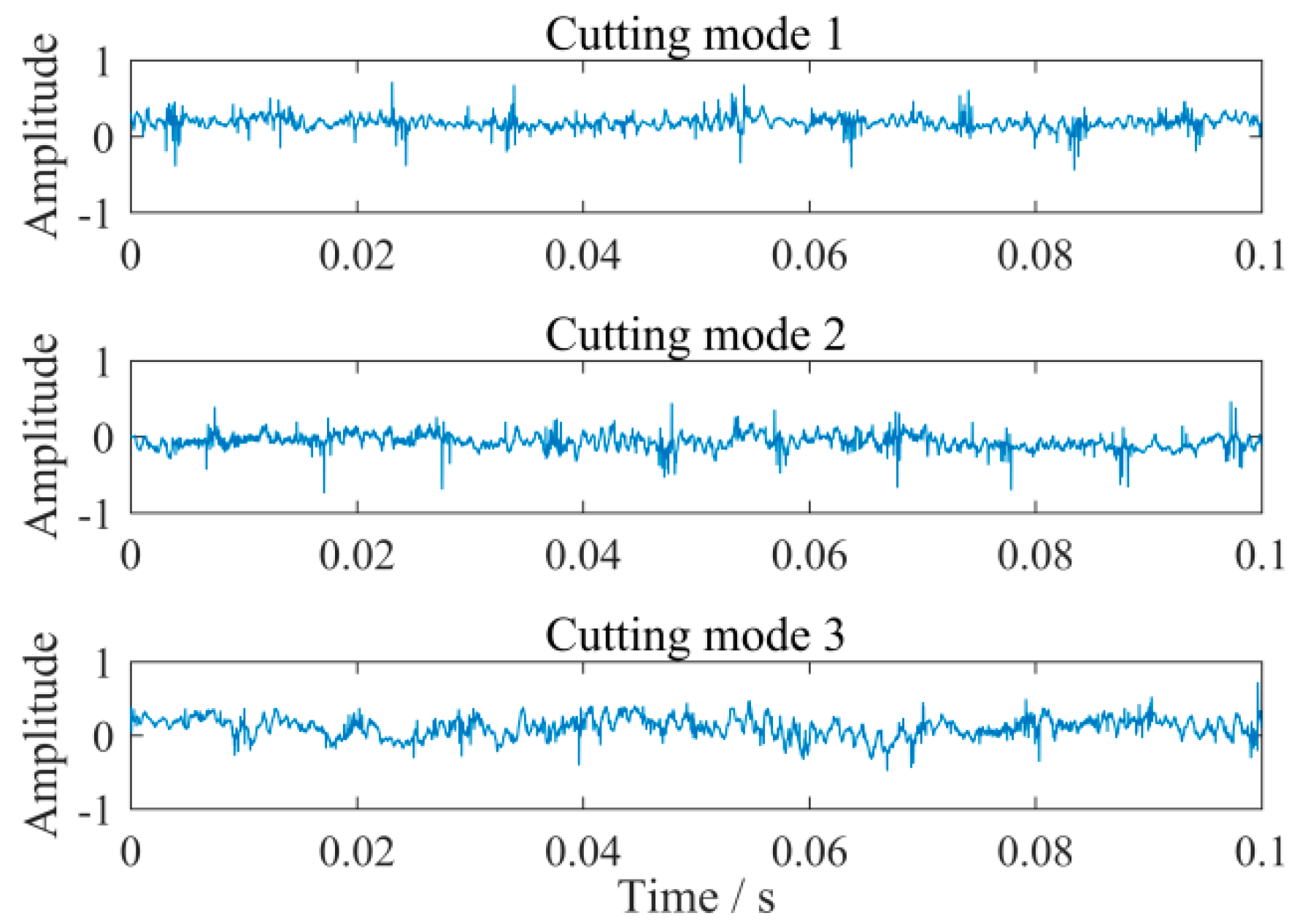
5.2. Processing and Feature Extraction of the Cutting Sound Signal
5.3. Cutting Pattern Recognition
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Yang, Z.; Cheng, G. Research on coal-rock recognition based on sound signal analysis. MATEC Web Conf. 2018, 232, 04075. [Google Scholar] [CrossRef]
- Bessinger, S.L.; Nelson, M.G. Remnant roof coal thickness measurement with passive gamma ray instruments in coal mines. IEEE Trans. Ind. Appl. 1993, 29, 562–565. [Google Scholar] [CrossRef]
- Kuenzer, C.; Bachmann, M.; Mueller, A.; Lieckfeld, L.; Wagner, W. Partial unmixing as a tool for single surface class detection and time series analysis. Int. J. Remote Sens. 2008, 29, 3233–3255. [Google Scholar] [CrossRef]
- Ralston, J.; Reid, D.; Hargrave, C.; Hainsworth, D. Sensing for advancing mining automation capability: A review of underground automation technology development. Int. J. Min. Sci. Technol. 2014, 24, 305–310. [Google Scholar] [CrossRef]
- Miao, S.; Liu, X. Free Radical Characteristics and Classification of Coals and Rocks Using Electron Spin Resonance Spectroscopy. J. Appl. Spectrosc. 2019, 86, 345–352. [Google Scholar] [CrossRef]
- Si, L.; Wang, Z.-B.; Jiang, G. Fusion Recognition of Shearer Coal-Rock Cutting State Based on Improved RBF Neural Network and D-S Evidence Theory. IEEE Access 2019, 7, 122106–122121. [Google Scholar] [CrossRef]
- Si, L.; Wang, Z.; Liu, X.; Tan, C. A sensing identification method for shearer cutting state based on modified multi-scale fuzzy entropy and support vector machine. Eng. Appl. Artif. Intell. 2019, 78, 86–101. [Google Scholar] [CrossRef]
- Vamsi, I.; Sabareesh, G.; Penumakala, P. Comparison of condition monitoring techniques in assessing fault severity for a wind turbine gearbox under non-stationary loading. Mech. Syst. Signal Process. 2019, 124, 1–20. [Google Scholar] [CrossRef]
- Amarnath, M.; Praveen Krishna, I.R. Local fault detection in helical gears via vibration and acoustic signals using EMD based statistical parameter analysis. Measurement 2014, 58, 154–164. [Google Scholar] [CrossRef]
- Ji, L.; Cheng, D.; Yi, C.; Zick, S. The separation of aircraft background acoustic blindness based on EEMD-ICA. J. Intell. Fuzzy Syst. 2019, 37, 509–516. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Z.; Tan, C.; Si, L.; Zhang, L.; Liu, X. Adaptive Wavelet Threshold Denoising Method for Machinery Sound Based on Improved Fruit Fly Optimization Algorithm. Appl. Sci. 2016, 6, 199. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Wang, Z.; Tan, C.; Si, L.; Liu, X. A Novel Denoising Method for an Acoustic-Based System through Empirical Mode Decomposition and an Improved Fruit Fly Optimization Algorithm. Appl. Sci. 2017, 7, 215. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.B.; Li, R.X.; Yang, M.L.; Lim, T.C.; Ding, W.P. Evaluation of vehicle interior sound quality using a continuous restricted Boltzmann machine-based DBN. Mech. Syst. Signal Process. 2017, 84, 245–267. [Google Scholar] [CrossRef] [Green Version]
- Damaševičius, R.; Napoli, C.; Sidekerskienė, T.; Woźniak, M. IMF mode demixing in EMD for jitter analysis. J. Comput. Sci. 2017, 22, 240–252. [Google Scholar] [CrossRef]
- Singh, D.S.; Zhao, Q. Pseudo-fault signal assisted EMD for fault detection and isolation in rotating machines. Mech. Syst. Signal Process. 2016, 81, 202–218. [Google Scholar] [CrossRef]
- Fu, Q.; Jing, B.; He, P.; Si, S.; Wang, Y. Fault Feature Selection and Diagnosis of Rolling Bearings Based on EEMD and Optimized Elman_AdaBoost Algorithm. IEEE Sens. J. 2018, 18, 5024–5034. [Google Scholar] [CrossRef]
- Lu, Y.; Xie, R.; Liang, S.Y. CEEMD-assisted kernel support vector machines for bearing diagnosis. Int. J. Adv. Manuf. Technol. 2020, 106, 3063–3070. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J. A Hybrid Energy Feature Extraction Approach for Ship-Radiated Noise Based on CEEMDAN Combined with Energy Difference and Energy Entropy. Processes 2019, 7, 69. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Yang, D.; Wang, K.; Wang, L.; Fan, J. A quality diagnosis method of GMAW based on improved empirical mode decomposition and extreme learning machine. J. Manuf. Process. 2020, 54, 120–128. [Google Scholar] [CrossRef]
- Wang, L.; Shao, Y. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control. 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Deng, X.; Xu, T.; Wang, R. Risk Evaluation Model of Highway Tunnel Portal Construction Based on BP Fuzzy Neural Network. Comput. Intell. Neurosci. 2018, 2018, 8547313. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Zhang, Z.; Li, Y.; Sun, Q. Open-circuit fault diagnosis of six-phase permanent magnet synchronous motor drive system based on empirical mode decomposition energy entropy. IEEE Access 2021, 9, 91137–91147. [Google Scholar] [CrossRef]
- Chen, Q.-Q.; Dai, S.-W.; Dai, H.-D. A Rolling Bearing Fault Diagnosis Method Based on EMD and Quantile Permutation Entropy. Math. Probl. Eng. 2019, 2019, 3089417. [Google Scholar] [CrossRef] [Green Version]
- Si, L.; Wang, Z.; Tan, C.; Liu, X.; Xu, X. A Feature Extraction Method for Shearer Cutting Pattern Recognition Based on Improved Local Mean Decomposition and Multi-Scale Fuzzy Entropy. Curr. Sci. 2017, 112, 2243. [Google Scholar] [CrossRef]
- Costa, M.; Goldberger, A.L.; Peng, C.-K. Multiscale Entropy Analysis of Complex Physiologic Time Series. Phys. Rev. Lett. 2002, 89, 068102. [Google Scholar] [CrossRef] [Green Version]
- Costa, M.; Goldberger, A.L.; Peng, C.-K. Multiscale entropy analysis of biological signals. Phys. Rev. E 2005, 71, 021906. [Google Scholar] [CrossRef] [Green Version]
- Jia, R.-S.; Sun, H.-M.; Peng, Y.-J.; Liang, Y.-Q.; Lu, X.-M. Automatic event detection in low SNR microseismic signals based on multi-scale permutation entropy and a support vector machine. J. Seism. 2016, 21, 735–748. [Google Scholar] [CrossRef]
- Dong, Z.; Zheng, J.; Huang, S.; Pan, H.; Liu, Q. Time-Shift Multi-scale Weighted Permutation Entropy and GWO-SVM Based Fault Diagnosis Approach for Rolling Bearing. Entropy 2019, 21, 621. [Google Scholar] [CrossRef] [Green Version]
- Xu, F.; Tse, P.W.T.; Fang, Y.-J.; Liang, J.-Q. A fault diagnosis method combined with compound multiscale permutation entropy and particle swarm optimization–support vector machine for roller bearings diagnosis. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 233, 615–627. [Google Scholar] [CrossRef]
- Xie, X.; Chen, W.; Chen, B.; Cheng, J.; Tan, L. Comprehensive fatigue estimation and fault diagnosis based on Refined Generalized Multi-Scale Entropy method of centrifugal fan blades. Measurement 2020, 166, 108224. [Google Scholar] [CrossRef]
- Dou, D.; Qiu, Z.; Yang, J. Parameter optimization of an industrial water injection hydrocyclone in the Taixi coal preparation plant. Int. J. Coal Prep. Util. 2020, 1–9. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. Random walk grey wolf optimizer for constrained engineering optimization problems. Comput. Intell. 2018, 34, 1025–1045. [Google Scholar] [CrossRef]
- Tan, X.; Yu, F.; Zhao, X. Support vector machine algorithm for artificial intelligence optimization. Clust. Comput. 2019, 22, 15015–15021. [Google Scholar] [CrossRef]
- Tao, Z.; Huiling, L.; Wenwen, W.; Xia, Y. GA-SVM based feature selection and parameter optimization in hospitalization expense modeling. Appl. Soft Comput. 2019, 75, 323–332. [Google Scholar] [CrossRef]
- Lu, J.; Liao, X.; Li, S.; Ouyang, H.; Chen, K.; Huang, B. An Effective ABC-SVM Approach for Surface Roughness Prediction in Manufacturing Processes. Complexity 2019, 2019, 3094670. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Gupta, S.; Deep, K. Enhanced leadership-inspired grey wolf optimizer for global optimization problems. Eng. Comput. 2019, 36, 1777–1800. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar] [CrossRef]
- Chaabi, L.; Lemzadmi, A.; Djebala, A.; Bouhalais, M.L.; Ouelaa, N. Fault diagnosis of rolling bearings in non-stationary running conditions using improved CEEMDAN and multivariate denoising based on wavelet and principal component analyses. Int. J. Adv. Manuf. Technol. 2020, 107, 3859–3873. [Google Scholar] [CrossRef]
- Ali, M.; Prasad, R. Significant wave height forecasting via an extreme learning machine model integrated with improved complete ensemble empirical mode decomposition. Renew. Sustain. Energy Rev. 2019, 104, 281–295. [Google Scholar] [CrossRef]
- Guo, R.; Zhao, Z.; Wang, T.; Liu, G.; Zhao, J.; Gao, D. Degradation State Recognition of Piston Pump Based on ICEEMDAN and XGBoost. Appl. Sci. 2020, 10, 6593. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A parameter-adaptive VMD method based on grasshopper optimization algorithm to analyze vibration signals from rotating machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Xiao, R.; Hu, Q.; Li, J. Leak detection of gas pipelines using acoustic signals based on wavelet transform and Support Vector Machine. Measurement 2019, 146, 479–489. [Google Scholar] [CrossRef]
- Miao, D.; Hossain, S. Improved gray wolf optimization algorithm for solving placement and sizing of electrical energy storage system in micro-grids. ISAT 2020, 102, 376–387. [Google Scholar] [CrossRef] [PubMed]
- Al-Betar, M.A.; Awadallah, M.A.; Faris, H.; Aljarah, I.; Hammouri, A.I. Natural selection methods for Grey Wolf Optimizer. Expert Syst. Appl. 2018, 113, 481–498. [Google Scholar] [CrossRef]
- Singh, N.; Singh, S. A novel hybrid GWO-SCA approach for optimization problems. Eng. Sci. Technol. Int. J. 2017, 20, 1586–1601. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Y.; Ming, Z. Improved dynamic grey wolf optimizer. Front. Inf. Technol. Electron. Eng. 2021, 22, 877–890. [Google Scholar] [CrossRef]
- Peng, T.; Li, C.; Zhu, Y. Design and Application of Simulating Cutting Experiment System for Drum Shearer. Appl. Sci. 2021, 11, 5917. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Model |
|---|---|
| Microphone | AWA14423 |
| Preamplifier | AWA14604 |
| Constant current power supply | AWA1791 |
| Data acquisition card | NI PCIe-6323 |
| Terminal board | CB-68LP |
| IMF Components | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 | IMF11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| correlation coefficient | 0.3504 | 0.2988 | 0.263 | 0.3474 | 0.4616 | 0.3419 | 0.1446 | 0.2758 | 0.1233 | 0.2688 | 0.0804 |
| Recognition Model | Average Accuracy Rate/% | Average Recognition Time/s | Accuracy Error/% | Time-Consuming Error/s |
|---|---|---|---|---|
| ABC–SVM | 96.11 | 0.4 | 3.34 | 0.21 |
| PSO–SVM | 95.61 | 0.74 | 3.89 | 0.28 |
| GWO–SVM | 96.11 | 0.28 | 0 | 0.19 |
| IGWO–SVM | 97.67 | 0.27 | 0.56 | 0.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Peng, T.; Zhu, Y. A Cutting Pattern Recognition Method for Shearers Based on ICEEMDAN and Improved Grey Wolf Optimizer Algorithm-Optimized SVM. Appl. Sci. 2021, 11, 9081. https://doi.org/10.3390/app11199081
Li C, Peng T, Zhu Y. A Cutting Pattern Recognition Method for Shearers Based on ICEEMDAN and Improved Grey Wolf Optimizer Algorithm-Optimized SVM. Applied Sciences. 2021; 11(19):9081. https://doi.org/10.3390/app11199081
Chicago/Turabian StyleLi, Changpeng, Tianhao Peng, and Yanmin Zhu. 2021. "A Cutting Pattern Recognition Method for Shearers Based on ICEEMDAN and Improved Grey Wolf Optimizer Algorithm-Optimized SVM" Applied Sciences 11, no. 19: 9081. https://doi.org/10.3390/app11199081
APA StyleLi, C., Peng, T., & Zhu, Y. (2021). A Cutting Pattern Recognition Method for Shearers Based on ICEEMDAN and Improved Grey Wolf Optimizer Algorithm-Optimized SVM. Applied Sciences, 11(19), 9081. https://doi.org/10.3390/app11199081