
A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research


Abstract
:1. Introduction
2. Materials and Methods
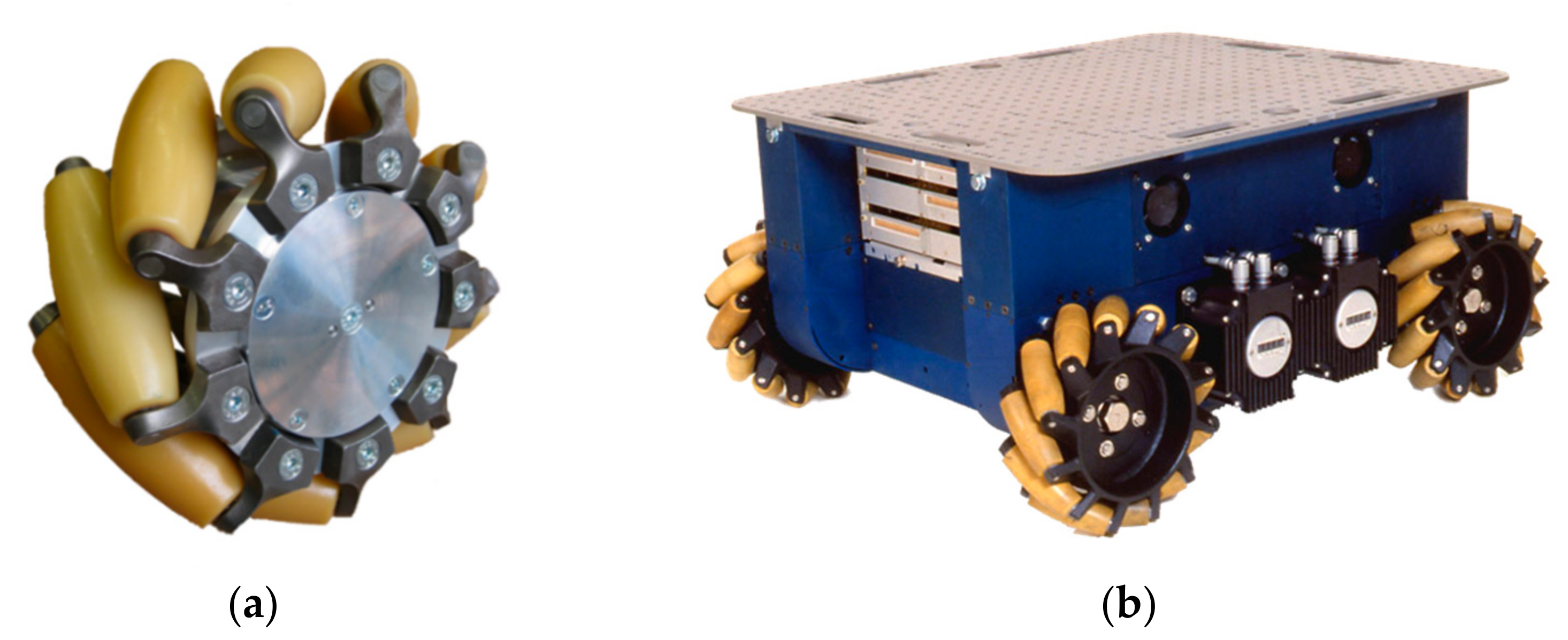
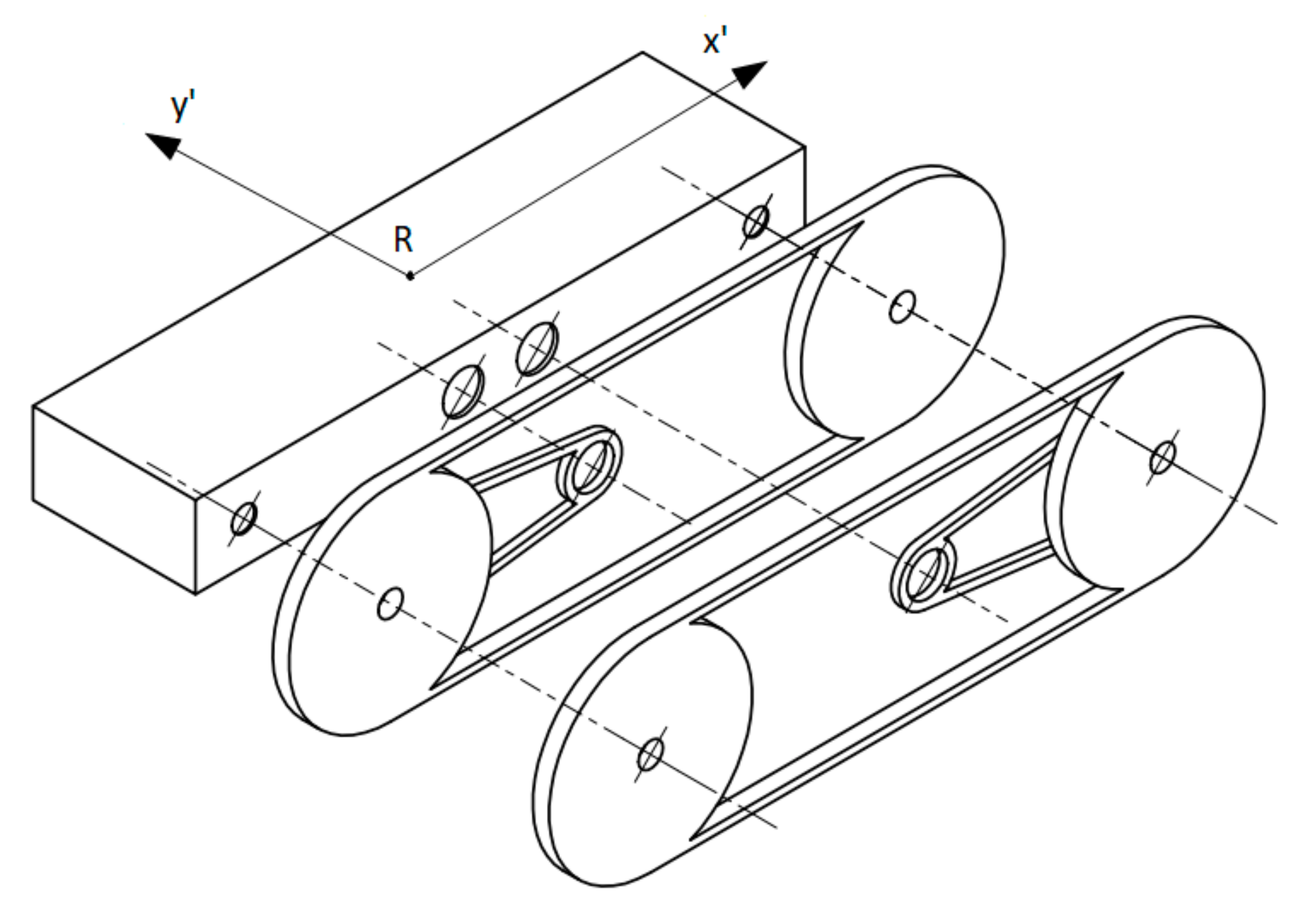
2.1. Construction of a Mobile Robot with Multidirectional Tracks
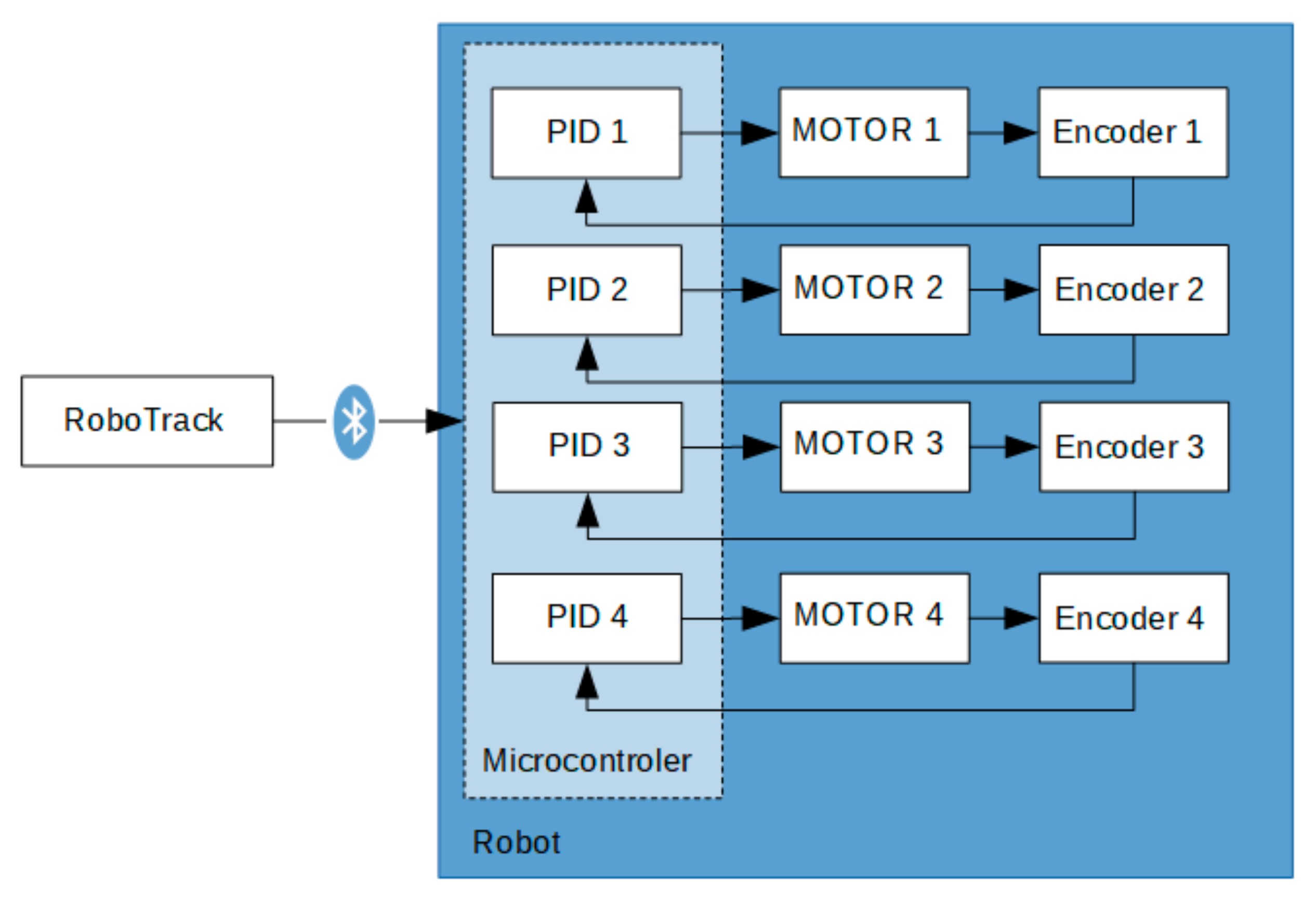
2.2. Control System of the Mobile Robot with Multidirectional Tracks
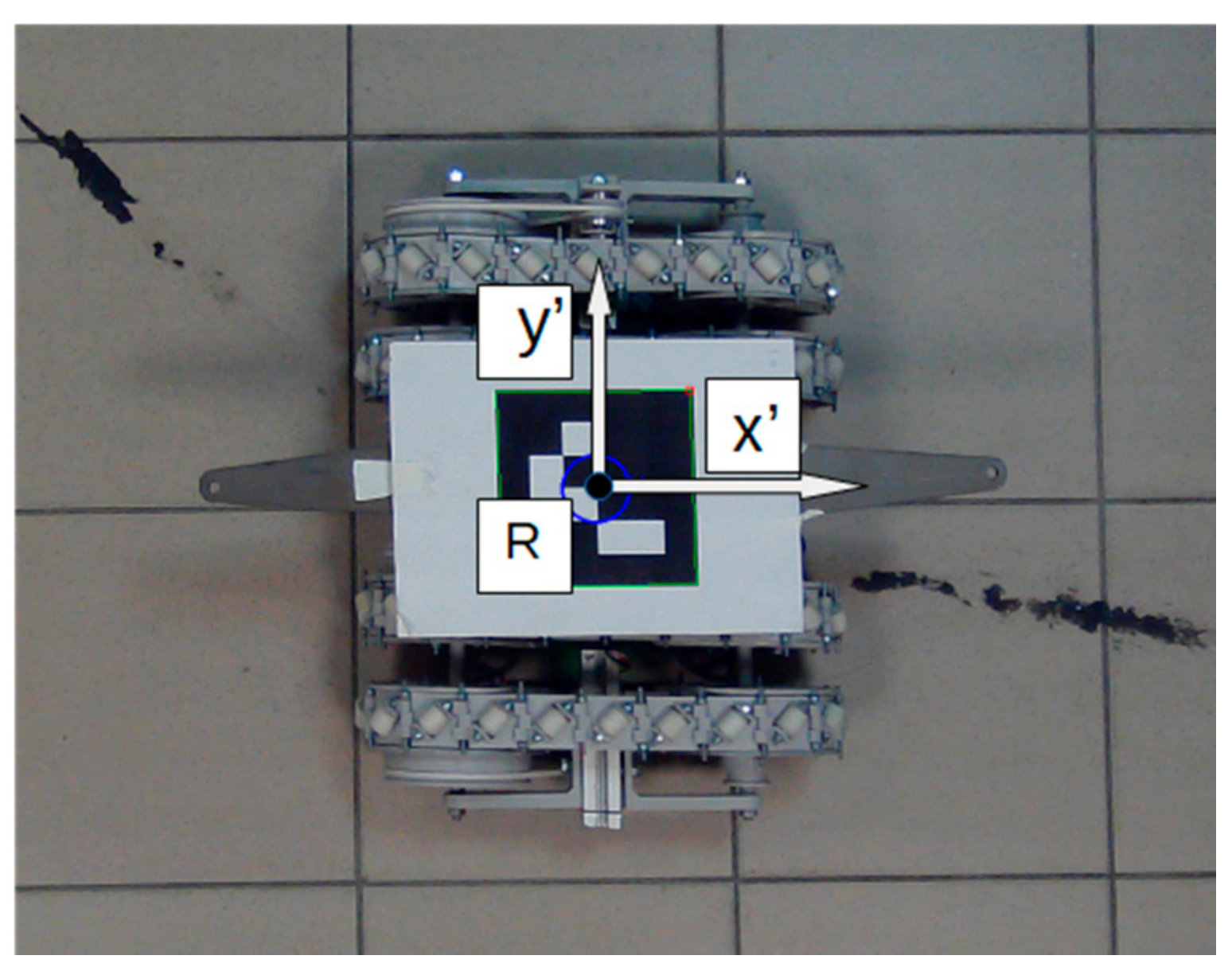
2.3. External Measurement Test Bench
2.4. Static Correction Method of the Robot’s Locomotion Direction
2.5. Experiment Plan
3. Results
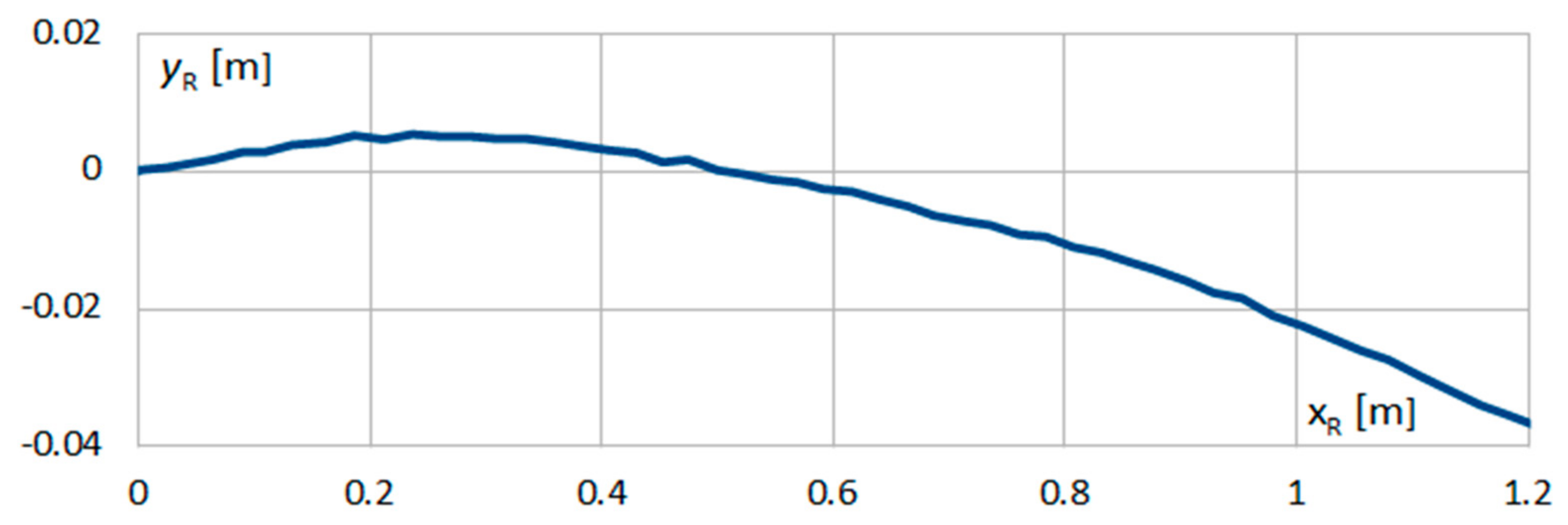
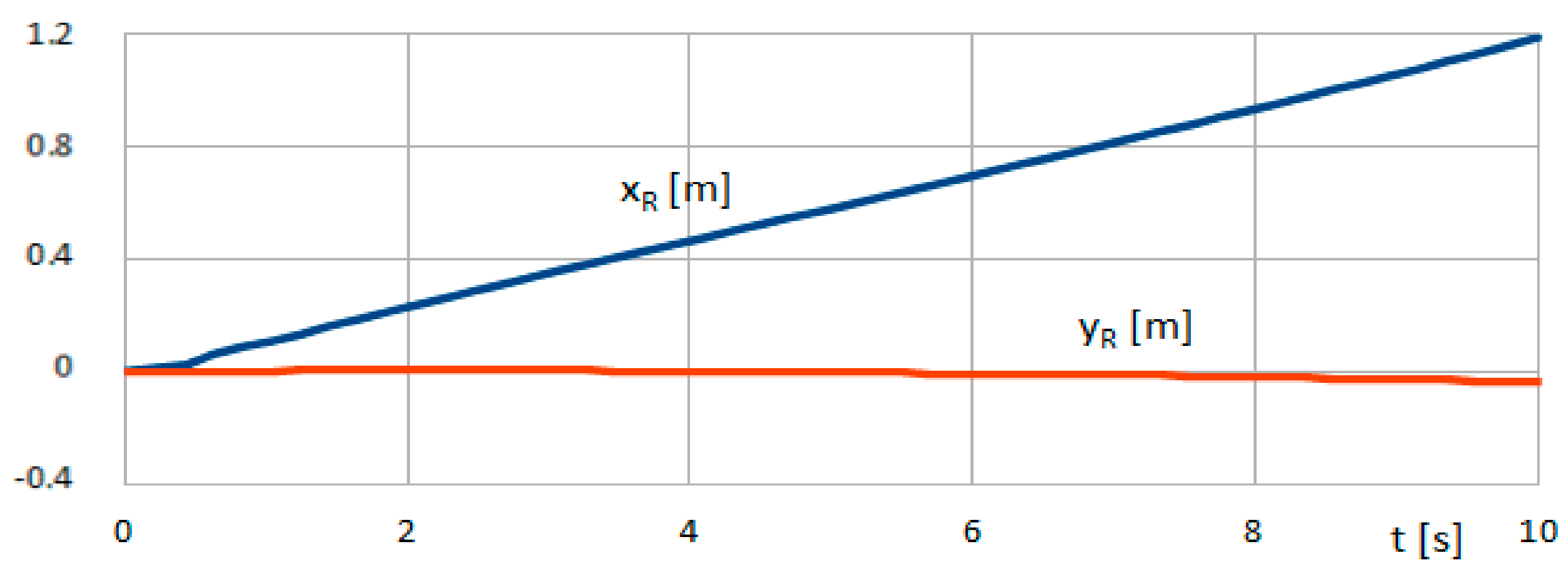
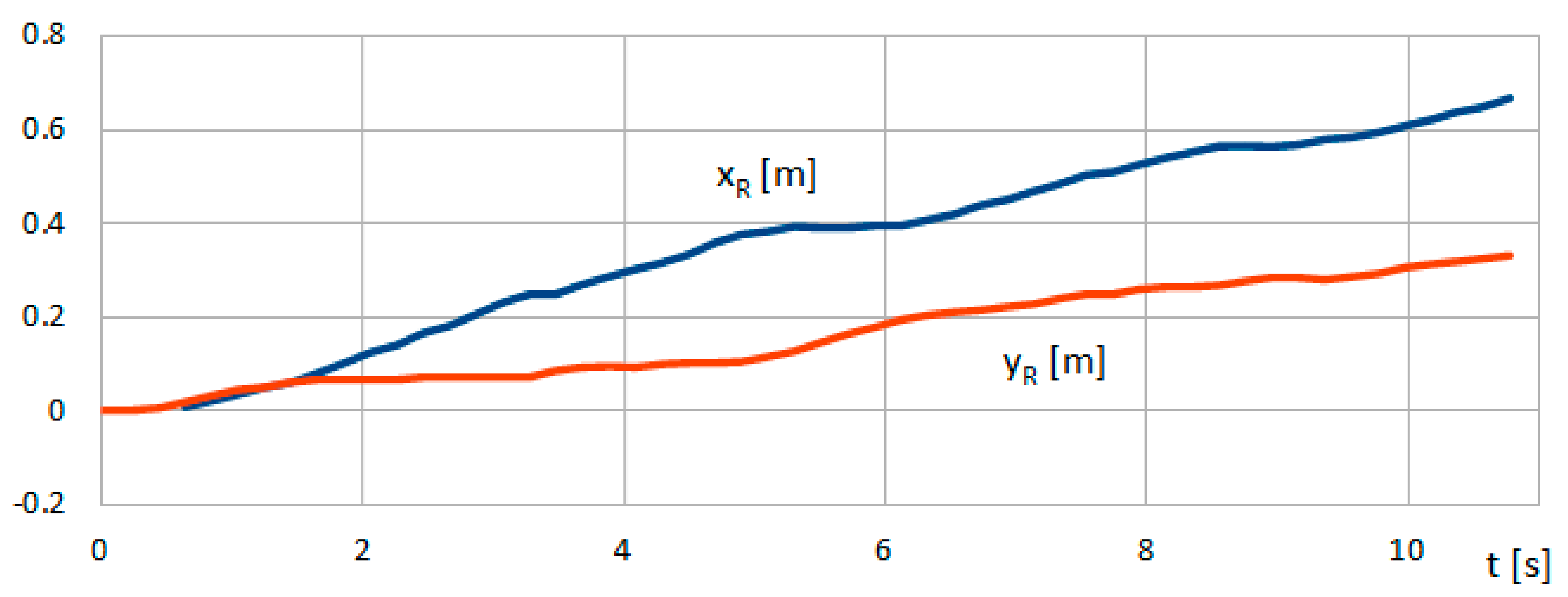
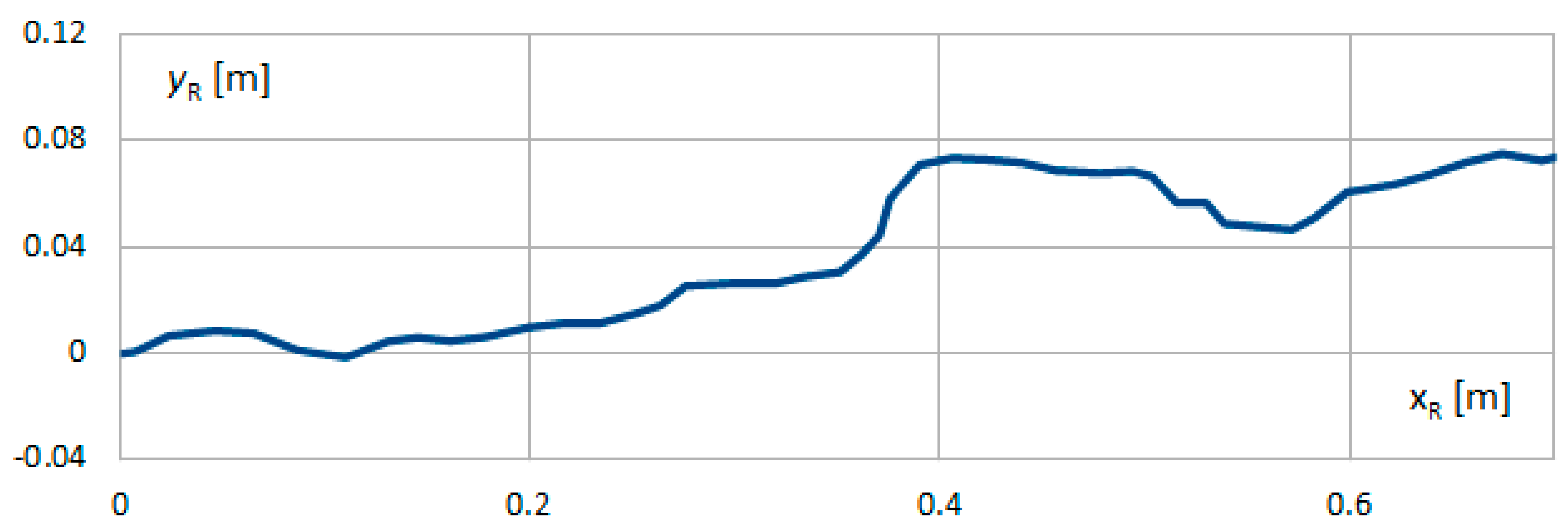
3.1. Robot Ride Tests
3.2. Tests of Robot Rides with Consideration for the Static Correction Method of Ride Direction
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mobile Robots Market by Operating Environment (Aerial, Ground, and Marine), Component (Control System, Sensors), Type (Professional and Personal & Domestic Robots), Application (Domestic, Military, Logistics, Field), and Geography—Global Forecast 2023. Markets and Markets SE 3610. Available online: https://www.marketsandmarkets.com/Market-Reports/mobile-robots-market-43703276.html?gclid=CjwKCAiAksyNBhAPEiwAlDBeLNKlJXjxNs2XgzEZLhSGhCanirlhMDnTZn9YKn3O3mNjX-upD3xwBhoCD6wQAvD_BwE (accessed on 11 December 2021).
- Irobot. Available online: https://irobot.pl/pl/outlet/312-irobot-roomba-980-5060359281043.html (accessed on 27 October 2020).
- Husqvarna. Available online: https://www.husqvarna.com/pl/produkty/kosiarki-automatyczne (accessed on 27 October 2020).
- Moreno, J.; Clotet, E.; Lupiañez, R.; Tresanchez, M.; Martínez, D.; Pallejà, T.; Casanovas, J.; Palacín, J. Design, Implementation and Validation of the Three-Wheel Holonomic Motion System of the Assistant Personal Robot (APR). Sensors 2016, 16, 1658. [Google Scholar] [CrossRef] [Green Version]
- Wong, J.Y.; Huang, W. “Wheels vs. tracks”—A fundamental evaluation from the traction perspective. J. Terramech. 2006, 43, 27–42. [Google Scholar] [CrossRef]
- Bałchanowski, J. Modelling and simulation studies on the mobile robot with self-leveling chassis. J. Theor. Appl. Mech. 2016, 54, 149–161. [Google Scholar] [CrossRef] [Green Version]
- Sperzyński, P.; Bałchanowski, J.; Gronowicz, A. Simulation of motion of a mobile robot on uneven terrain. J. Theor. Appl. Mech. 2020, 58, 541–552. [Google Scholar] [CrossRef]
- Gronowicz, A.; Szrek, J. Design of LegVan Wheel-Legged Robot’sMechanical and Control System. SYROM 2009, 145–158. [Google Scholar]
- Machado, J.A.T.; Silva, M.F. An Overview of Legged Robots. In Proceedings of the MME 2006—International Symposium on Mathematical Methods in Engineering, Ankara, Turkey, 27–29 April 2006. [Google Scholar]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the Rough-Terrain Quadruped Robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef] [Green Version]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2245–2252. [Google Scholar]
- Hornback, P. The Wheel Versus Track Dilemma. ARMOR 1998, 26, 33–34. [Google Scholar]
- Hertig, L.; Schindler, D.; Bloesch, M.; Remy, C.D.; Siegwart, R. Unified state estimation for a ballbot. In Proceedings of the Robotics and Automation (ICRA), 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Seeman, M.; Broxvall, M.; Saffiotti, A.; Wide, P. An Autonomous Spherical Robot for Security Tasks. In Proceedings of the Computational Intelligence for Homeland Security and Personal Safety, Alexandria, VA, USA, 16–17 October 2006. [Google Scholar]
- Guardbot. Available online: https://guardbot.org/ (accessed on 27 October 2020).
- Lee, Y.; Yoon, D.; Oh, J.; Kim, H.S.; Seo, T. Novel Angled Spoke-Based Mobile Robot Design for Agile Locomotion with Obstacle-Overcoming Capability. IEEE/ASME Trans. Mechatron. 2020, 25, 1980–1989. [Google Scholar] [CrossRef]
- Romano, D.; Donati, E.; Benelli, G.; Stefanini, C. A review on animal–robot interaction: From bio-hybrid organisms to mixed societies. Biol. Cybern. 2019, 113, 201–225. [Google Scholar] [CrossRef] [PubMed]
- Ilon, B.E. Wheels for a Course Stable Selfpropelling Vehicle Movable in Any Desired Direction on the Ground or Some Other Base. U.S. Patent US3876255A, 8 April 1975. [Google Scholar]
- Li, Y.; Ge, S.; Dai, S.; Zhao, L.; Yan, X.; Zheng, Y.; Shi, Y. Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation. Sensors 2019, 20, 75. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Suboptimal Omnidirectional Wheel Design and Implementation. Sensors 2021, 21, 865. [Google Scholar] [CrossRef]
- Imetron GmbH. Mecanum Wheel. Attribution-ShareAlike 3.0 Unported (CC BY-SA 3.0). Available online: https://de.wikipedia.org/wiki/Mecanum-Rad#/media/Datei:Meacnum-Rad.png (accessed on 27 October 2020).
- Gwpcmu. Mecanum Wheel. Attribution 3.0 Unported (CC BY 3.0). Available online: https://en.wikipedia.org/wiki/Mecanum_wheel#/media/File:UranusOmniDirectionalRobotPodnar.png (accessed on 27 October 2020).
- Wu, M.; Dai, S.-L.; Yang, C. Mixed Reality Enhanced User Interactive Path Planning for Omnidirectional Mobile Robot. Appl. Sci. 2020, 10, 1135. [Google Scholar] [CrossRef] [Green Version]
- Palacin, J.; Rubies, E.; Clotet, E.; Martinez, D. Trajectory of a human-sized mobile robot using three omnidirectional wheels: From simulation to implementation. In press. Sensors 2021, 21, 7216. [Google Scholar]
- Yamada, N.; Komura, H.; Endo, G.; Nabae, H.; Suzumor, K. Spiral Mecanum Wheel Achieving Omnidirectional Locomotion in Step-Climbing. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 1285–1290. [Google Scholar]
- Bae, J.-J.; Kang, N. Design Optimization of a Mecanum Wheel to Reduce Vertical Vibrations by the Consideration of Equivalent Stiffness. Shock. Vib. 2016, 2016, 5892784. [Google Scholar] [CrossRef]
- Moreno, J.; Clotet, E.; Tresanchez, M.; Martínez, D.; Casanovas, J.; Palacín, J. Measurement of Vibrations in Two Tower-Typed Assistant Personal Robot Implementations with and without a Passive Suspension System. Sensors 2017, 17, 1122. [Google Scholar] [CrossRef] [Green Version]
- Rizzo, C.; Lagraña, A.; Serrano, D. GEOMOVE: Detached AGVs for Cooperative Transportation of Large and Heavy Loads in the Aeronautic Industry. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 126–133. [Google Scholar]
- Mortensen Ernits, R.; Hoppe, N.; Kuznetsov, I.; Uriarte, C.; Freitag, M. A New Omnidirectional Track Drive System for Off-Road Vehicles. In Proceedings of the XXII International Conference on “Material Handling, Constructions and Logistics”, Belgrade, Serbia, 4–6 October 2017. [Google Scholar]
- Isoda, T. Roller-Crawler Type of Omni-Directional Mobile Robor for Off-Road Running. IEEE Trans. Robot. Autom. 2002, 18, 251–256. [Google Scholar]
- Zhang, Y.; Huang, T. Research on a tracked omnidirectional and cross-country vehicle. Mech. Mach. Theory 2015, 87, 18–44. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H.; Fang, Y. Design and motion analysis of a novel track platform. J. Phys. Conf. Ser. 2018, 1074, 012014. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, Y.; Li, N.; Shang, Y. Research on a medium-tracked omni-vehicle. Mech. Sci. 2020, 11, 137–152. [Google Scholar] [CrossRef]
- Tao, H.; Yunan, Z.; Peng, T.; Nanming, Y.; Jian, Z. Design & Kinematics Analysis of a Tracked OmnidirectionalMobile Platform. J. Mech. Eng. 2014, 50, 206–212. [Google Scholar]
- Guillén Ruiz, S.; Calderita, L.V.; Hidalgo-Paniagua, A.; Bandera Rubio, J.P. Measuring Smoothness as a Factor for Efficient and Socially Accepted Robot Motion. Sensors 2020, 20, 6822. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.-Y.; He, C.-H. Mobile Robot Self-Localization Using Omnidirectional Vision with Feature Matching from Real and Virtual Spaces. Appl. Sci. 2021, 11, 3360. [Google Scholar] [CrossRef]
- OpenCV. Available online: https://opencv.org/ (accessed on 13 May 2021).




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension Name and Symbol | Value | Dimension Name and Symbol | Value |
|---|---|---|---|
| robot mass mr | 6 kg | working load u | 2 kg |
| track link height a | 45 mm | track link width b | 40 mm |
| roller radius rr | 10 mm | distance between the axis of the roller and the plane of the track link hr | 5 mm |
| roller mounting angle γ | 45° | distance between pairs of continuous track systems c | 270 mm |
| distance between the continuous track systems in pair d | 80 mm | distance between the axes of the driving and idler wheels e | 225 mm |
| belt wheel radius on drive wheel rks | 60 mm | belt wheel radius on motor rs | 15 mm |
| Longitudinal Motion | Transverse Motion | ||
|---|---|---|---|
| Ride without Direction Correction | Ride with Direction Correction | Ride without Direction Correction | Ride with Direction Correction |
| Δα = 0.085 rad | Δα = 0.025 rad | Δα = 0.549 rad | Δα = 0.207 rad |
| Δvi < 0.02 m/s | Δvi < 0.02 m/s | Δvi < 0.03 m/s | Δvi < 0.04 m/s |
| ωR = 0.009 rad/s | ωR = 0.003 rad/s | ωR = 0.052 rad/s | ωR = 0.024 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiedeń, M.; Bałchanowski, J. A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research. Appl. Sci. 2021, 11, 11778. https://doi.org/10.3390/app112411778
Fiedeń M, Bałchanowski J. A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research. Applied Sciences. 2021; 11(24):11778. https://doi.org/10.3390/app112411778
Chicago/Turabian StyleFiedeń, Mateusz, and Jacek Bałchanowski. 2021. "A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research" Applied Sciences 11, no. 24: 11778. https://doi.org/10.3390/app112411778
APA StyleFiedeń, M., & Bałchanowski, J. (2021). A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research. Applied Sciences, 11(24), 11778. https://doi.org/10.3390/app112411778