
Structural Health Monitoring of 2D Plane Structures




Abstract
:1. Introduction
2. Structural System Identification of Structures with 2D Elements by Observability Techniques
2.1. Inverse Analysis of the Stiffness Matrix Method
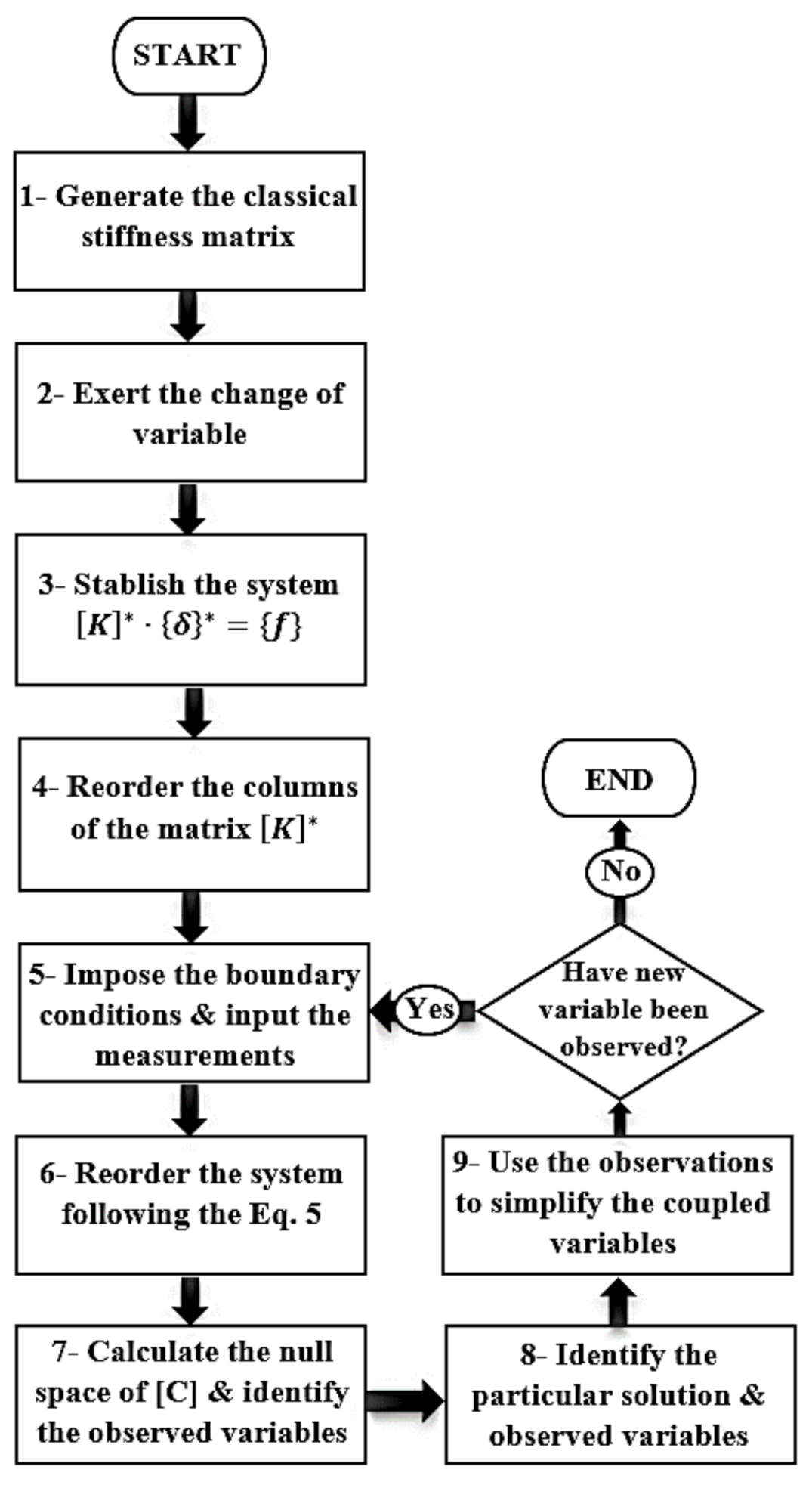
2.2. Proposed Algorithm
- Step 1. Generate the classical stiffness matrix equation presented in Equation (2).
- Step 2. Exert the change in variable to the stiffness matrix using the functions of Poisson’s ratio presented in Equations (7) and (8).
- Step 3. Establish Equation (3) considering the variables defined in Step 2.
- Step 4. Reorder the columns in matrix to isolate the monomial products of variables.
- Step 5. Introduce the boundary conditions, the known forces, and the measured deflections.
- Step 6. Reorder the system following Equation (5).
- Step 7. Calculate the null space of [C] numerically and identify the observed variables.
- Step 8. Calculate the particular solution of the system numerically using the Moore–Penrose pseudoinverse function.
- Step 9. Use the observed parameters or the observed coupled variables to simplify the other coupled variables.
- Step 10. Introduce the observed parameters into Step 5. Repeat until no additional parameters are observed (end of the recursive process).
2.3. Comparison of the Application of OM to the 1D and 2D Element Structures
3. Example of the Application
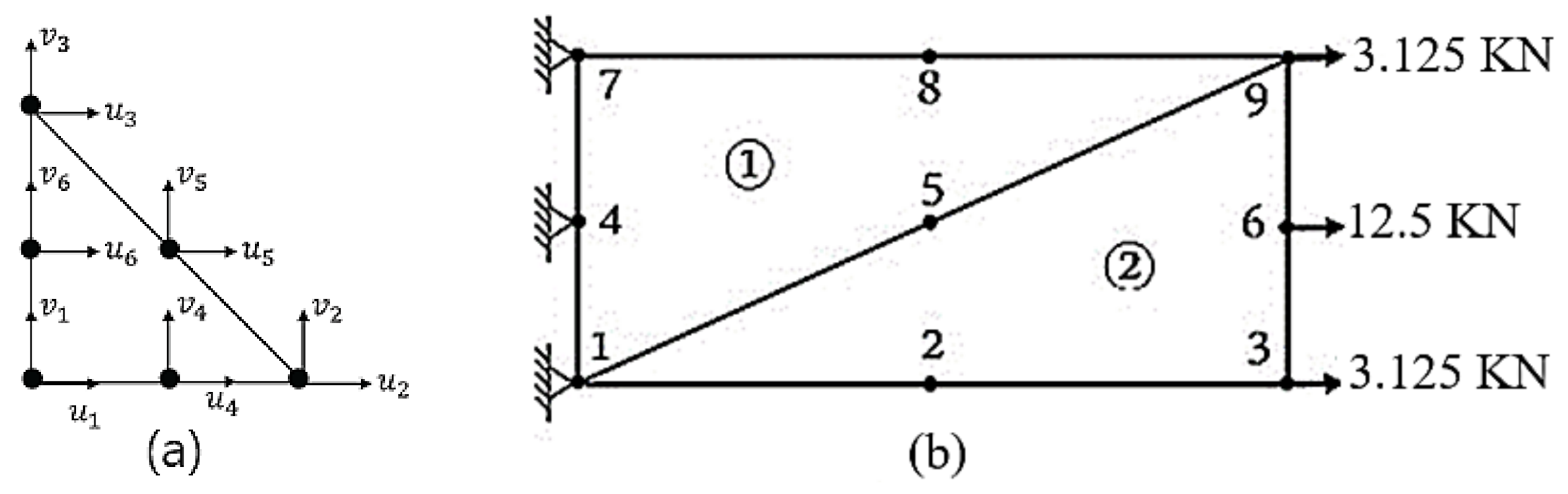
3.1. Definition of the Analyzed Structure
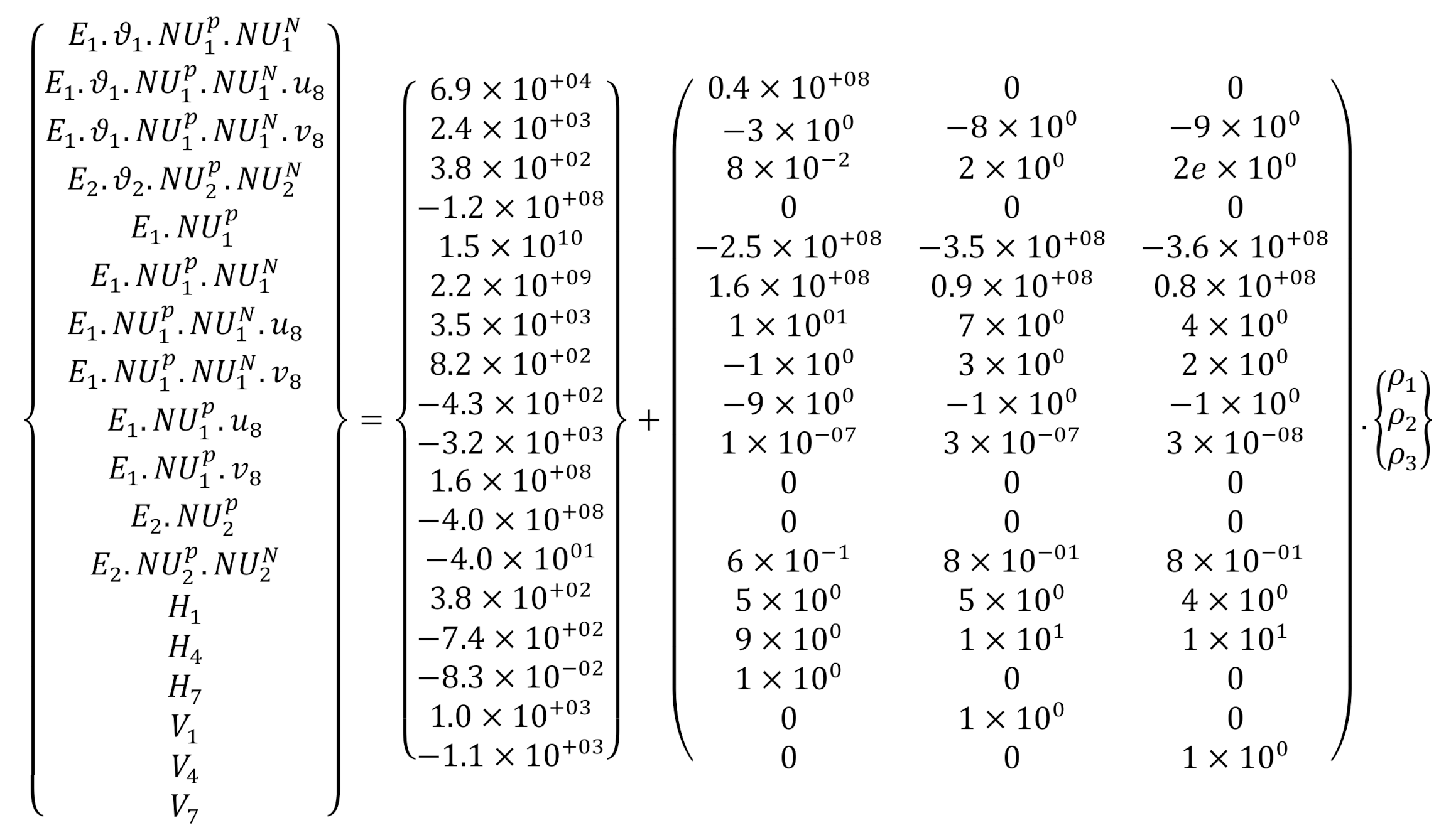
3.2. Inverse Analysis
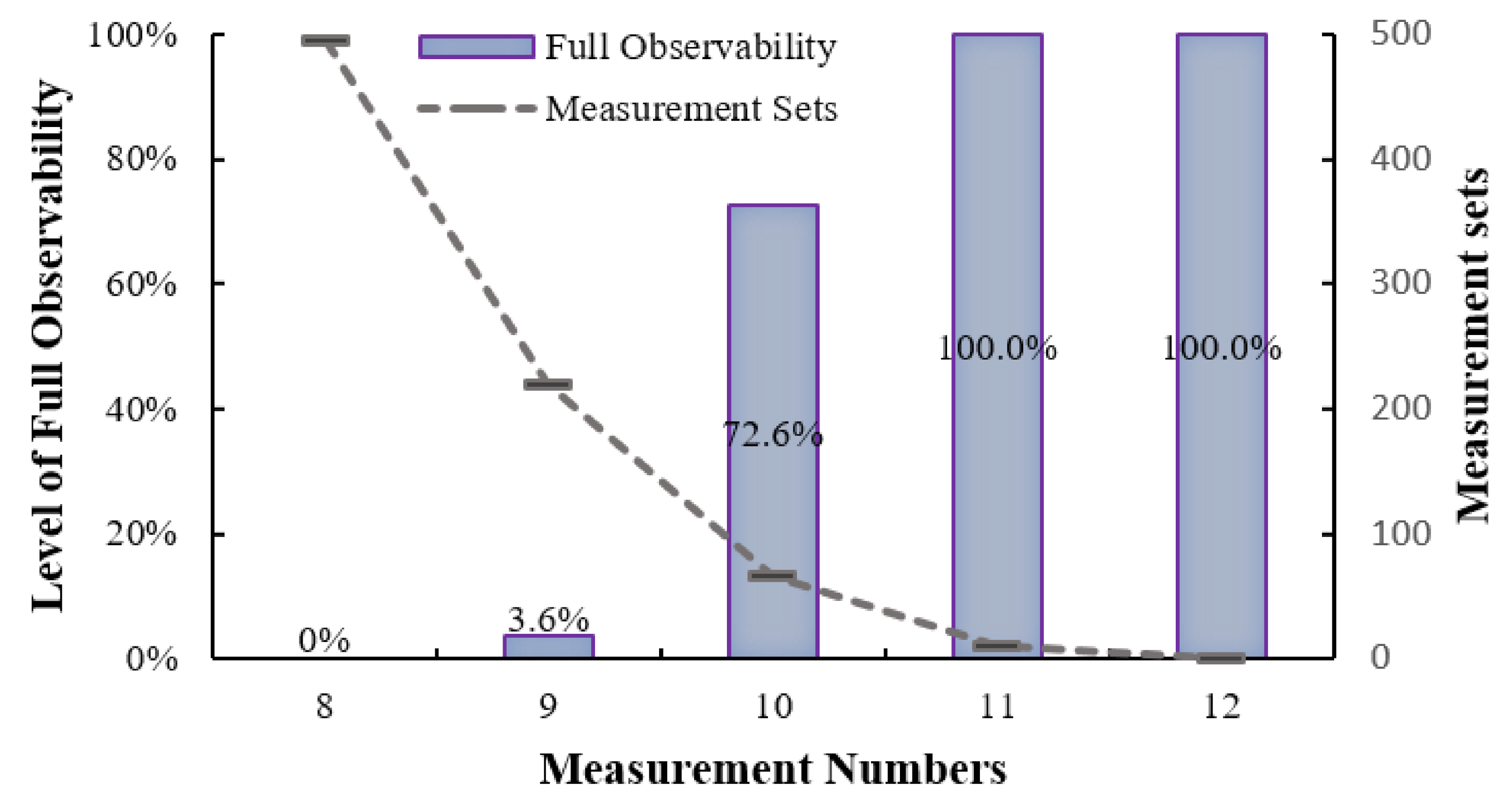
3.3. Statistical Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| 1D | One dimensional |
| 2D | Two dimensional |
| [B] | Strain-displacement matrix |
| [C] | Coefficient matrix |
| CST | Constant Strain Triangle |
| [D] | Elastic matrix |
| Young’s Modulus | |
| Number of elements | |
| Force vector | |
| Subset of unknown forces | |
| Subset of known forces | |
| h | Plate thickness |
| Horizontal force at the ith node | |
| Moment of inertia | |
| [K] | Stiffness matrix |
| [K*] | Modified stiffness matrix |
| Subset of the modified stiffness matrix | |
| Lj | Length of the jth element |
| LST | Linear strain triangle |
| {N} | Vector of known parameters |
| Number of nodes in the FEM | |
| Change of variable for the negative sign in denominator | |
| Change of variable for the positive sign in denominator | |
| OM | Observability method |
| Horizontal deflection at the ith node | |
| Null space of the system of equations | |
| Vertical force at the ith node | |
| Vertical deflection at the ith node | |
| General solution of the system of equations | |
| Poisson’s Ratio | |
| } | Vector of displacements |
| } | Modified vector of displacements |
| Subset of unknown deflections | |
| Subset of known deflections | |
| Vector of arbitrary values |
References
- Ceravolo, R.; Faraci, A.; Miraglia, G. Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring. Appl. Sci. 2020, 10, 5813. [Google Scholar] [CrossRef]
- Park, J. Special feature vibration-based structural health monitoring. Appl. Sci. 2020, 10, 5139. [Google Scholar] [CrossRef]
- Sirca, G.F.; Adeli, H. System identification in structural engineering. Sci. Iran. 2012, 19, 1355–1364. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wang, X.; Tan, G.; He, X.; Luo, G. System reliability evaluation of prefabricated RC hollow slab bridges considering hinge joint damage based on modified AHP. Appl. Sci. 2019, 9, 4841. [Google Scholar] [CrossRef] [Green Version]
- Campos, J.; Sharma, P.; Albano, M.; Ferreira, L.; Larrañaga, M. An Open Source Framework Approach to Support Condition Monitoring and Maintenance. Appl. Sci. 2020, 10, 6360. [Google Scholar] [CrossRef]
- Romero, F.; Lofrano, E.; Paolone, A. Damage identification in parabolic arc via orthogonal empirical mode decomposition. In Proceedings of the International Design Engineering Technical Conference and Computers and Information in Engineering, Buffalo, NY, USA, 17–20 August 2014. [Google Scholar] [CrossRef]
- Lofrano, E.; Romero, M.; Paolone, A. A pseudo-model structural damage index based on orthogonal empirical mode decomposition. J. Mech. Sci. 2019. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, G.; Zhang, Z. Experimental study of structural damage identification based on modal parameters and decay ratio of acceleration signals. Front. Archit. Civ. Eng. China 2011, 5, 112–120. [Google Scholar] [CrossRef]
- Salavati, M. Approximation of structural damping and input excitation force. Front. Struct. Civ. Eng. 2017, 11, 244–254. [Google Scholar] [CrossRef]
- Xia, Y.; Lei, X.; Wang, P.; Liu, G.; Sun, L. Long-term performance monitoring and assessment of concrete beam bridges using neutral axis indicator. Struct. Control Health Monit. 2020, 27, e2637. [Google Scholar] [CrossRef]
- Zhao, C.; Lavasan, A.A.; Barciaga, T.; Zarev, V.; Datcheva, M.; Schanz, T. Model validation and calibration via back analysis for mechanized tunnel simulations—The Western Scheldt tunnel case. Comput. Geotech. 2015, 69, 601–614. [Google Scholar] [CrossRef]
- Xia, Y.; Wang, P.; Sun, L. Neutral Axis Position Based Health Monitoring and Condition Assessment Techniques for Concrete Box Girder Bridges. Int. J. Struct. Stab. Dyn. 2019, 19, 1940015. [Google Scholar] [CrossRef]
- Yassine, R.; Salman, F.; Shaer, A.; Hammad, M.; Duhamel, D. Application of the recursive finite element approach on 2D periodic structures under harmonic vibration. Computation 2017, 5, 1. [Google Scholar] [CrossRef] [Green Version]
- Hashash, Y.M.A.; Levasseur, S.; Osouli, A.; Finno, R.; Malecot, Y. Comparison of two inverse analysis techniques for learning deep excavation response. Comput. Geotech. 2010, 37, 323–333. [Google Scholar] [CrossRef]
- Dudley, D.G.; Pao, H.Y. System identification for wireless propagation channels in tunnels. IEEE Trans. Antennas Propag. 2005, 53, 2400–2405. [Google Scholar] [CrossRef]
- Sakurai, S.; Akutagawa, S.; Takeuchi, K.; Shinji, M.; Shimizu, N. Back analysis for tunnel engineering as a modern observational method. Tunn. Undergr. Sp. Technol. 2003, 18, 185–196. [Google Scholar] [CrossRef]
- Sakurai, S.; Takeuchi, K. Back analysis of measured displacements of tunnels. Rock Mech. Rock Eng. 1983, 16, 173–180. [Google Scholar] [CrossRef]
- Bhalla, S.; Yang, Y.W.; Zhao, J.; Soh, C.K. Structural health monitoring of underground facilities—Technological issues and challenges. Tunn. Undergr. Sp. Technol. 2005, 20, 487–500. [Google Scholar] [CrossRef]
- Mobaraki, B.; Vaghefi, M. Effect of the soil type on the dynamic response of a tunnel under surface detonation. Combust. Explos. Shock Waves 2016, 52, 363–370. [Google Scholar] [CrossRef]
- Mobaraki, B.; Vaghefi, M. Numerical study of the depth and cross-sectional shape of tunnel under surface explosion. Tunn. Undergr. Sp. Technol. 2015, 47, 114–122. [Google Scholar] [CrossRef]
- Khamesi, H.; Torabi, S.R.; Mirzaei-Nasirabad, H.; Ghadiri, Z. Improving the Performance of Intelligent Back Analysis for Tunneling Using Optimized Fuzzy Systems: Case Study of the Karaj Subway Line 2 in Iran. J. Comput. Civ. Eng. 2014, 29, 05014010. [Google Scholar] [CrossRef]
- Dehghan, A.N.; Shafiee, S.M.; Rezaei, F. 3-D stability analysis and design of the primary support of Karaj metro Tunnel: Based on convergence data and back analysis algorithm. Eng. Geol. 2012, 141, 141–149. [Google Scholar] [CrossRef]
- Germoso, C.; Quaranta, G.; Duval, J.L.; Chinesta, F. Non-instrusive in-plane-out-of-plane seperated representation in 3D parametric elastodynamics. Computation 2020, 8, 78. [Google Scholar] [CrossRef]
- Xia, Y.; Jian, X.; Yan, B.; Su, D. Infrastructure Safety Oriented Traffic Load Monitoring Using Multi-Sensor and Single Camera for Short and Medium Span Bridges. Remote Sens. 2019, 11, 2651. [Google Scholar] [CrossRef] [Green Version]
- Vardakos, S.; Gutierrez, M.; Xia, C. Parameter identification in numerical modeling of tunneling using the Differential Evolution Genetic Algorithm (DEGA). Tunn. Undergr. Sp. Technol. 2012, 28, 109–123. [Google Scholar] [CrossRef]
- Xiang, Z.; Swoboda, G.; Cen, Z. Optimal Layout of Displacement Measurements for Parameter Identification Process in Geomechanics. Int. J. Geomech. 2003, 3, 205–216. [Google Scholar] [CrossRef]
- Santos, C.; Ledesma, A.; Gens, A. Backanalysis of measured movements in ageing tunnels. In Geotechnical Aspects of Underground Construction in Soft Ground; CRC Press: Boca Raton, FL, USA, 2012; pp. 223–229. [Google Scholar]
- Lozano-Galant, J.A.; Nogal, M.; Castillo, E.; Turmo, J. Application of observability techniques to structural system identification. Comput. Civ. Infrastruct. Eng. 2013, 28, 434–450. [Google Scholar] [CrossRef]
- Lozano-Galant, J.A.; Nogal, M.; Paya-Zaforteza, I.; Turmo, J. Structural system identification of cable-stayed bridges with observability techniques. Struct. Infrastruct. Eng. 2014, 10, 1331–1344. [Google Scholar] [CrossRef]
- Castillo, E.; Lozano-Galant, J.A.; Nogal, M.; Turmo, J. New tool to help decision making in civil engineering. J. Civ. Eng. Manag. 2015, 21, 689–697. [Google Scholar] [CrossRef] [Green Version]
- Nogal, M.; Lozano-Galant, J.A.; Turmo, J.; Castillo, E. Numerical damage identification of structures by observability techniques based on static loading tests. Struct. Infrastruct. Eng. 2016, 12, 1216–1227. [Google Scholar] [CrossRef] [Green Version]
- Lei, J.; Nogal, M.; Lozano-Galant, J.A.; Xu, D.; Turmo, J. Constrained observability method in static structural system identification. Struct. Control Health Monit. 2018, 25, 1–15. [Google Scholar] [CrossRef]
- Lei, J.; Xu, D.; Turmo, J. Static structural system identification for beam-like structures using compatibility conditions. Struct. Control Health Monit. 2017, 25, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Lozano-Galant, J.A.; Nogal, M.; Turmo, J.; Castillo, E. Selection of measurement sets in static structural identification of bridges using observability trees. Comput. Concr. 2015, 15, 771–794. [Google Scholar] [CrossRef]
- Tomàs, D.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. Structural system identification of thin web bridges by observability techniques considering shear deformation. Thin-Walled Struct. 2018, 123, 282–293. [Google Scholar] [CrossRef] [Green Version]
- Emadi, S.; Lozano-Galant, J.A.; Xia, Y.; Ramos, G.; Turmo, J. Structural system identification including shear deformation of composite bridges from vertical deflection. Steel Compos. Struct. 2019, 32, 731–741. [Google Scholar] [CrossRef]
- Peng, T.; Casas, J.R.; Lozano-Galant, J.A.; Turmo, T. Constrained observability techniques for structural system identification using modal analysis. J. Sound Vib. 2020, 479. [Google Scholar] [CrossRef]
- Rao, S.S. Analysis of plates. In The Finite Element Method in Engineering, 6th ed.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 379–425. [Google Scholar] [CrossRef]
- Castillo, E.; Nogal, M.; Lozano-Galant, J.A.; Turmo, J. Solving Some Special Cases of Monomial Ratio Equations Appearing Frequently in Physical and Engineering Problems. Math. Probl. Eng. 2016, 2016, 1–29. [Google Scholar] [CrossRef]
- MathWorks. MATLAB; The MathWorks, Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Ramesh, S.S.; Wang, C.M.; Reddy, J.N.; Ang, K.K. Computation of stress resultants in plate bending problems using higher-order triangular elements. Eng. Struct. 2008, 30, 2687–2706. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, X.; Zheng, H. A three-node triangular element with continuous nodal stress. Comput. Struct. 2014, 141, 46–58. [Google Scholar] [CrossRef]
- Piltner, R.; Taylor, R.L. Triangular finite elements with rotational degrees of freedom and enhanced strain modes. Comput. Struct. 2000, 75, 361–368. [Google Scholar] [CrossRef]
- Neto, M.A.; Leal, R.P.; Yu, W. A triangular finite element with drilling degrees of freedom for static and dynamic analysis of smart laminated structures. Comput. Struct. 2012, 108, 61–74. [Google Scholar] [CrossRef]
- Kattan, P.I. MATLAB Guide to Finite Elements; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coupled variables | |||||
| Nonlinear products of unknowns | |||||
| Unknowns | Change of Variables | Updated Unknowns |
|---|---|---|
| 1D OM | 2D OM | ||
|---|---|---|---|
| Before Change of Var. | After Change of Var. | ||
| Type of element | 2-noded beam element | 6-noded triangular element | 6-noded triangular element |
| Degrees of freedom per element | 6 | 12 | 12 |
| Number of unknows | 2 | 2 | 4 |
| Unknown variables per element | , | and | , , , |
| Products of unknowns | (/ (/ | (/) (/), (/) | |
| Size of stiffness matrix | ] | ||
| Calculation of the null space | Symbolical | Numerical | Numerical |
| Node | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| (m) e-6 | 0.080 | 0.1580 | 0.0739 | 0.1568 | 0.0716 | 0.1580 | |||
| (m) e-6 | 0.0227 | 0.0288 | 0.0055 | 0.0113 | −0.011 | −0.007 | |||
| (KN) | −3.541 | −11.67 | −3.541 | ||||||
| (KN) | −2.863 | 0.012 | 2.851 |
| 8 Measurements | 9 Measurements | 10 Measurements | ||
|---|---|---|---|---|
| P.O. | F.O. | P.O. | F.O. | P.O. |
| 2,,,,9 | ,8,9 | ,,,, | ,,,, | |
| ,,,6,9 | 2,3,,,, | |||
| ,,, | ,6,8,9 | 2,,6,, | ||
| ,8 | 2,,,,8, | |||
| ,9 | 2,,,,,9 | |||
| ,9 | ||||
| ,,5,,8, | ||||
| ,,, | ||||
| ,, | ||||
| ,, ,6,,9 | ||||
| ,,,, | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mobaraki, B.; Ma, H.; Lozano Galant, J.A.; Turmo, J. Structural Health Monitoring of 2D Plane Structures. Appl. Sci. 2021, 11, 2000. https://doi.org/10.3390/app11052000
Mobaraki B, Ma H, Lozano Galant JA, Turmo J. Structural Health Monitoring of 2D Plane Structures. Applied Sciences. 2021; 11(5):2000. https://doi.org/10.3390/app11052000
Chicago/Turabian StyleMobaraki, Behnam, Haiying Ma, Jose Antonio Lozano Galant, and Jose Turmo. 2021. "Structural Health Monitoring of 2D Plane Structures" Applied Sciences 11, no. 5: 2000. https://doi.org/10.3390/app11052000
APA StyleMobaraki, B., Ma, H., Lozano Galant, J. A., & Turmo, J. (2021). Structural Health Monitoring of 2D Plane Structures. Applied Sciences, 11(5), 2000. https://doi.org/10.3390/app11052000