
High-Resolution Image Transmission from UAV to Ground Station for Search and Rescue Missions Planning




Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Rate Estimation
- Determine the necessary ground sampling distance (GSD) (in cm/pixel);
- For the chosen camera sensor with m x n pixels, calculate the area covered with one orthophoto image and the dimensions in meters (Equation (2)):
- 3.
- Depending on the UAV camera sensor and applied lenses (field of view (FOV)), calculate the necessary UAV flight altitude:
- 4.
- Calculate the time needed between successive images taken by the UAV camera using Equation (4):
2.2. Data Link
2.3. System Architecture
3. Results
3.1. Test 1
- Channel bandwidth—8 MHz;
- Channel Frequency—76−2477 MHz;
- Tx/Rx power—15 dbm;
- Wireless Distance—100 m;
- MIMO—on;
- Tx/Rx rate—Auto.
3.2. Test 2
3.3. Test 3
3.4. Test 4
- Tx power = 30 dbm;
- Bandwidth = 8 MHz.
3.5. Test 5
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement.
Data Availability Statement
Conflicts of Interest
References
- Du, Y.C.; Zhang, M.X.; Ling, H.F.; Zheng, Y.J. Evolutionary Planning of Multi-UAV Search for Missing Tourists. IEEE Access 2019, 7, 73480–73492. [Google Scholar] [CrossRef]
- Koester, R.J. Lost Person Behavior: A Search and Rescue Guide on where to Look for Land, Air, and Water, 1st ed.; dbS Productions LLC: Charlottesville, WV, USA, 2008. [Google Scholar]
- ESRI: Gis Mapping Software. Available online: https://www.esri.com/en-us/home (accessed on 26 August 2020).
- QGIS. Available online: https://qgis.org/en/site/ (accessed on 20 August 2020).
- Sava, E.; Twardy, C.; Koester, R.; Sonwalkar, M. Evaluating Lost Person Behavior Models. Trans. GIS 2015, 20, 38–53. [Google Scholar] [CrossRef]
- Doherty, P.J.; Guo, Q.; Doke, J.; Ferguson, D. An analysis of probability of area techniques for missing persons in Yosemite National Park. Appl. Geogr. 2014, 47, 99–110. [Google Scholar] [CrossRef]
- Koester, R.J. 2010 International Search and Rescue Incident Database (ISRID). Available online: http://www.dbs-sar.com/SAR_Research/ISRID.htm (accessed on 29 August 2020).
- Ding-Bing, L.; Rong-Terng, J.; Hsin-Piao, L. Mobile location estimation and tracking for GSM systems. In Proceedings of the 2004 IEEE 15th International Symposium on Personal, Indoor and Mobile Radio Communications (IEEE Cat. No.04TH8754), Barcelona, Spain, 5–8 September 2004; Volume 4, pp. 2835–2839. [Google Scholar] [CrossRef]
- Morgand, P.; Ferreol, A.; Sarkis, R.; Craeye, C.; Oestges, C. Detection and location of people in emergency situations through their PMR or GSM/UMTS phones. In Proceedings of the 3rd European Wireless Technology Conference, Paris, France, 27–28 September 2010; 2010; pp. 185–188. [Google Scholar]
- Drane, C.; Macnaughtan, M.; Scott, C. Positioning GSM telephones. IEEE Commun. Mag. 1998, 36, 46–54. [Google Scholar] [CrossRef]
- Gao, Y.; Deng, Z.; Zhang, Y.; Sun, S.; Li, Z. Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue. Sensors 2019, 19, 4526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Berná Galiano, J.A. System for Broadcasting Geolocation Information in Emergency Situations via Wi-Fi Interfaces of Smartphones; Universidad de Alicante, European Satellite Navigation Competition: Madrid, Spain, 2016. [Google Scholar]
- MapSAR; ESRI. MapSAR User’s Manual, Version 1.3; ESRI Press: Redlands, CA, USA, 2012. [Google Scholar]
- Turić, H.; Dujmić, H.; Papić, V. Two-stage Segmentation of Aerial Images for Search and Rescue. Inf. Technol. Control 2010, 2, 138–145. [Google Scholar]
- Božić-Štulić, D.; Marušić, Ž.; Gotovac, S. Deep Learning Approach in Aerial Imagery for Supporting Land Search and Rescue Missions. Int. J. Comput. Vis. 2019, 1, 1–23. [Google Scholar] [CrossRef]
- Hein, D.; Kraft, T.; Brauchle, J.; Berger, R. Integrated UAV-Based Real-Time Mapping for Security Applications. ISPRS Int. J. Geo-Inf. 2019, 8, 219. [Google Scholar] [CrossRef] [Green Version]
- Wavelet-Based Adaptive Antenna Systems. Available online: https://www.sbir.gov/node/1482261 (accessed on 15 December 2020).
- Guariglia, E.; Silvestrov, S. Fractional-Wavelet Analysis of Positive definite Distributions and Wavelets on D′(C). Eng. Math. II 2016, 179, 337–353. [Google Scholar]
- Berry, M.V.; Lewis, Z.V. On the Weierstrass-Mandelbrot Fractal Function. Proc. R. Soc. Lond. 1980, 370, 459–484. [Google Scholar]
- Guariglia, E. Entropy and Fractal Antennas. Entropy 2016, 18, 84. [Google Scholar] [CrossRef]
- Guariglia, E. Harmonic Sierpinski Gasket and Applications. Entropy 2018, 20, 714. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Su, H.; Zhong, C.; Meng, Z.; Luo, H.; Li, X.; Tang, Y.Y.; Lu, Y. Hyperspectral image classification using wavelet transform-based smooth ordering. Int. J. Wavelets Multiresolut. Inf. Proc. 2019, 17, 1950050. [Google Scholar] [CrossRef]
- Zheng, X.; Tang, Y.Y.; Zhou, J. A Framework of Adaptive Multiscale Wavelet Decomposition for Signals on Undirected Graphs. IEEE Trans. Signal Proc. 2019, 67, 1696–1711. [Google Scholar] [CrossRef]
- Guariglia, E. Primality, Fractality, and Image Analysis. Entropy 2019, 21, 304. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://doi.org/10.1007/978-3-319-42105-6_16 (accessed on 15 December 2020).
- Chandran, S.; Vrindavanam, J.; Mahanti, G.K. Wavelet and JPEG based Image Compression: An Experimental Analysis. International Conference & Workshop on Emerging Trends in Technology. In Proceedings of the International Conference & Workshop on Emerging Trends in Technology, Mumbai, India, 24–25 February 2012; pp. 36–42. [Google Scholar]
- Julein Reichel, G.M. Integer Wavelet Transform for Embedded Lossy to Lossless Image Compression. IEEE Trans. Image Proc. 2001, 10, 383–392. [Google Scholar] [CrossRef]
- Kozmus Trajkovski, K.; Grigillo, D.; Petrovič, D. Optimization of UAV Flight Missions in Steep Terrain. Remote Sens. 2020, 12, 1293. [Google Scholar] [CrossRef] [Green Version]
- Agisoft Metashape. Available online: https://www.agisoft.com (accessed on 20 August 2020).
- Pix4D. Available online: https://www.pix4d.com/ (accessed on 26 October 2020).
- ArcGIS Drone2Map. Available online: https://www.esri.com/en-us/arcgis/products/arcgis-drone2map/overview (accessed on 26 October 2020).
- Božić-Štulić, D.; Kružić, S.; Gotovac, S.; Papić, V. Complete Model for Automatic Object Detection and Localisation on Aerial Images using Convolutional Neural Networks. J. Commun. Softw. Syst. 2018, 14, 82–90. [Google Scholar] [CrossRef] [Green Version]
- Musić, J.; Orović, I.; Marasović, T.; Papić, V.; Stanković, S. Gradient Compressive Sensing for Image Data Reduction in UAV based Search and Rescue in the Wild. Math. Probl. Eng. 2016, 2016, 6827414. [Google Scholar] [CrossRef] [Green Version]
- Musić, J.; Marasović, T.; Papić, V.; Orović, I.; Stanković, S. Performance of compressive sensing image reconstruction for search and rescue. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1739–1743. [Google Scholar] [CrossRef]
- Van den Berght, B.; Pollin, S. Air-to-Ground and Air-to-Air Data Link Communication. In UAV Networks and Communications; Namuduri, K., Chaumette, S., Kim, J.H., Sterbenz, J.P.G., Eds.; Cambridge University Press: Cambridge, UK, 2018; pp. 26–44. [Google Scholar]
- Connectivity Comes of Age for Smaller UAVs, Whitepaper. Available online: https://www.cobhamaerospacecommunications.com/aircraft-satcom-systems/special-purpose-aircraft-connectivity/aviator-uav-200/whitepaper-connectivity-comes-of-age-for-smaller-uavs/docview/ (accessed on 10 September 2020).
- Wang, A.; Wang, P.; Miao, X.; Li, X.; Ye, N.; Liu, Y. A review on non-terrestrial wireless technologies for Smart City Internet of Things. Int. J. Distrib. Sens. Netw. 2020, 16, 1–17. [Google Scholar] [CrossRef]
- Xolani, B.M.; Elisha, D.M. A Survey on Propagation Challenges in Wireless Communication Networks over Irregular Terrains. In Proceedings of the 2018 Open Innovations Conference, Johannesburg, South Africa, 3–5 October 2018; pp. 79–86. [Google Scholar]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV Communication Networks Issues: A Review. Arch. Comput. Methods Eng. 2020, 1–21. [Google Scholar] [CrossRef]
- Li, J.; Ding, Y.; Fang, Z. Key Techniques Research on UAV Data link. Procedia Eng. 2015, 99, 1099–1107. [Google Scholar] [CrossRef] [Green Version]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A Comprehensive Survey on UAV Communication Channel Modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Cuhadar, I.; Dursun, M. Unmanned Air Vehicle System’s Data Links. J. Autom. Control Eng. 2016, 4, 189–193. [Google Scholar] [CrossRef] [Green Version]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]
- SkyHopper Pro. Available online: https://www.skyhopper.biz/products/video-processing-analytics/ (accessed on 10 September 2020).
- AirLink, Octopus ISR. Available online: https://octopus.uavfactory.com/uav-payloads-equipment/ip-data-link (accessed on 10 September 2020).
- StreamCaster 4200. Available online: https://silvustechnologies.com/products/streamcaster-radios/ (accessed on 10 September 2020).
- nVIP2400. Available online: http://www.microhardcorp.com/brochures/nVIP2400.Brochure.Rev.1.12.pdf (accessed on 10 September 2020).
- EDL Micro from AeroNix. Available online: https://www.aeronix.com/product/edl-micro/ (accessed on 10 September 2020).
- pDDL2450. Available online: http://www.microhardcorp.com/pMDDL2450-2.php (accessed on 10 September 2020).
- Link Budget Calculator—Everything RF. Available online: https://www.everythingrf.com/rf-calculators/link-budget-calculator (accessed on 10 September 2020).
- Poole, I. Free Space Path Loss: Details, Formula, Calculator. Available online: https://www.electronics-notes.com/articles/antennas-propagation/propagation-overview/free-space-path-loss.php (accessed on 10 September 2020).
- Yanmaz, E.; Hayat, S.; Scherer, J.; Bettstetter, C. Experimental performance analysis of two-hop aerial 802.11 networks. In Proceedings of the IEEE Wireless Communications Network. Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 3118–3123. [Google Scholar]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Hentati, A.I.; Fourati, L.C. Comprehensive survey of UAVs communication networks. Comput. Stand. Interfaces 2020, 72, 103451. [Google Scholar] [CrossRef]
- Van Hoang, T.; Duong Phung, M.; Hiep Dinh, T.; Ha, Q.P. System Architecture for Real-Time Surface Inspection Using Multiple UAVs: A Communications Viewpoint. IEEE Syst. J. 2019, 14, 1–12. [Google Scholar]
- Sanchez-Garcia, J.; Garcia-Campos, J.M.; Arzamendia, M.; Reina, D.G.; Toral, S.L.; Gregor, D. A Survey on Unmanned Aerial and Aquatic Vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Plurato SKYCAM. Available online: http://skycam.plurato.com (accessed on 10 September 2020).
- Kranakis, E.; Krizanc, D.; Williams, E. Directional versus omnidirectional antennas for energy consumption and k-connectivity of networks of sensors. In Proceedings of the International Conference on Principles of Distributed Systems, Cortina, Italy, 23 July 2004; Springer: Berlin, Germany, 2014; pp. 357–368. [Google Scholar]
- Min, B.-C.; Parasuraman, R.; Lee, S.; Jung, J.-W.; Matson, E.T. A directional antenna based leader–follower relay system for end-to-end robot communications. Robot. Auton. Syst. 2018, 101, 57–73. [Google Scholar] [CrossRef] [Green Version]
- Jirous Antennas. Available online: https://en.jirous.com/antenna-2,4ghz/ja-215mimo/ (accessed on 28 October 2020).
- Pravenaa, S.; Menaka, R. A Methodical Review on Image Stitching and Video Stitching Techniques. Int. J. Appl. Eng. Res. 2016, 11, 3442–3448. [Google Scholar]
- Tomasi, C.; Kanade, T. Shape and motion from image streams under orthography: A factorization method. Int. J. Comput. Vis. 1992, 9, 137–154. [Google Scholar] [CrossRef]
- Güldenring, J.; Gorczak, P.; Eckermann, F.; Patchou, M.; Tiemann, J.; Kurtz, F.; Wietfeld, C. Reliable Long-Range Multi-Link Communication for Unmanned Search and Rescue Aircraft Systems in Beyond Visual Line of Sight Operation. Drones 2020, 4, 16. [Google Scholar] [CrossRef]
- Choi, K.; Lee, I. A UAV based close-range rapid aerial monitoring system for emergency responses. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXVIII-1/C22. In Proceedings of the ISPRS Zurich 2011 Workshop, Zurich, Switzerland, 14–16 September 2011; pp. 247–252. [Google Scholar]
- Vasić, M.K.; Papić, V. Multimodel Deep Learning for Person Detection in Aerial Images. Electronics 2020, 9, 1459. [Google Scholar] [CrossRef]
- Zolanvari, M.; Jain, R.; Salman, T. Potential Data Link Candidates for Civilian Unmanned Aircraft Systems: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 292–319. [Google Scholar] [CrossRef] [Green Version]
- Microsoft Image Composite Editor. Available online: https://www.microsoft.com/en-us/research/product/computational-photography-applications/image-composite-editor/ (accessed on 28 January 2021).
- Latif, R.; Saddik, A. SLAM algorithms implementation in a UAV, based on a heterogeneous system: A survey. In Proceedings of the 2019 4th World Conference on Complex Systems (WCCS), Ouarzazate, Morocco, 22–25 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
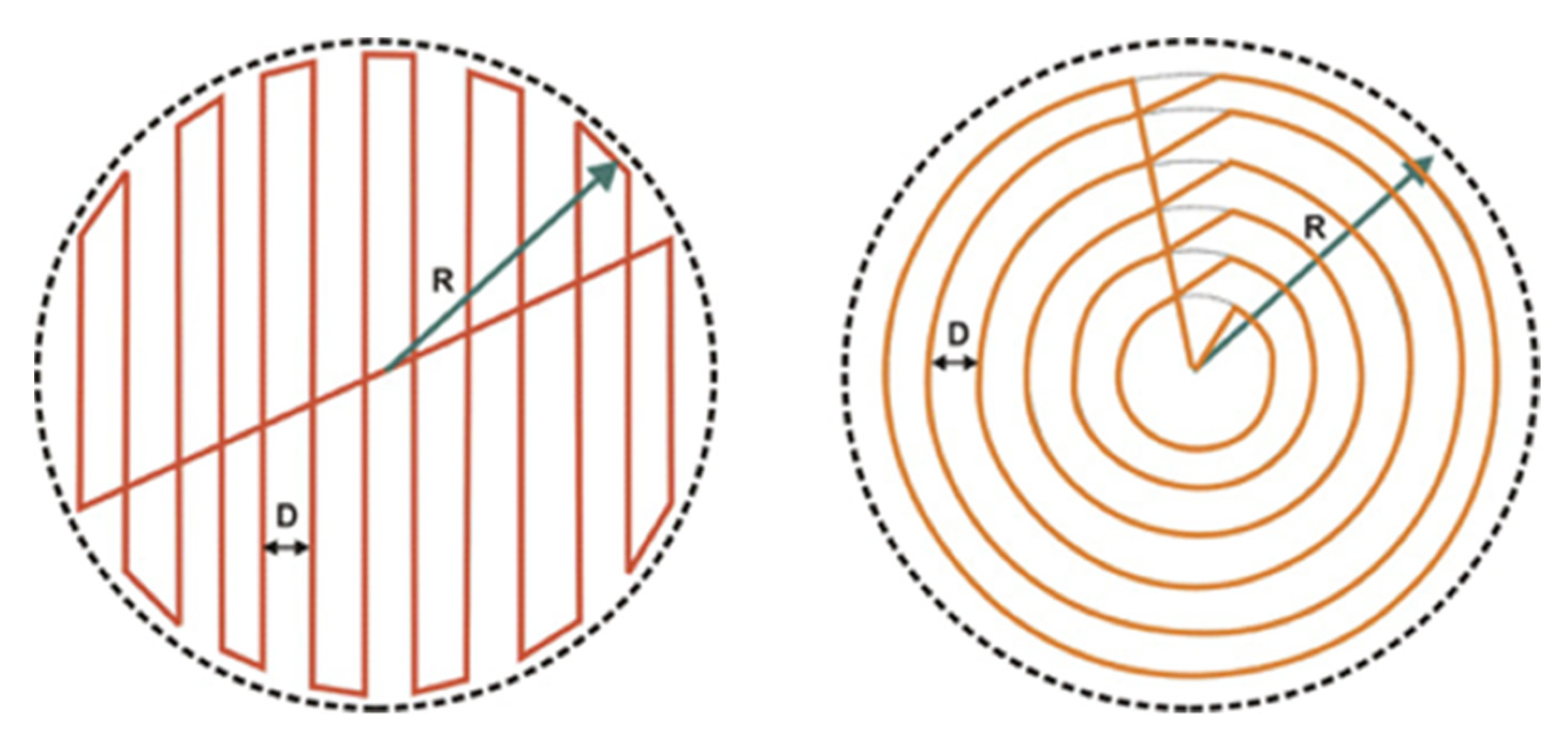
| Flight Plan Type | Advantages/Drawbacks |
|---|---|
| Circular | More difficult to realize the trajectory |
| Trajectory easy to follow with a UAV | |
| More difficult to stitch images together (flight direction vector changes) | |
| Areas with higher probability of detection are searched first | |
| Standard | Commonly supported by flight planners |
| Advantageous if part of the terrain is completely inaccessible | |
| Search sequence uncorrelated with area probability of detection | |
| Trajectory hard to follow (for fixed-wing UAV) |
| Data Rate | MIMO | Rx Sensitivity | Frequency | Range | Weight | Channel Bandwidth |
|---|---|---|---|---|---|---|
| 20 Mbps | 2 × 2 | −98 dBm | 2.402–2.478 GHz | 5 km+ | OEM 7 g + Motherboard 50 g approximately | 8 MHz and 4 MHz |
| Parameter | UAV—Transmitter | GS—Receiver |
|---|---|---|
| PTX (dBm) | 30 | - |
| Antenna (dBi) | 2 | 14 |
| Attenuation in cables and connectors (dB) | 0.5 | 0.5 |
| Measurement Location | Throughput (MBps) | UAV Altitude (m) | Comment |
|---|---|---|---|
| ML1 (1450 m distance from GS) | 1.5 | 10 | |
| 1.6 | 30 | ||
| 1.6 | 50 | ||
| 1.85 | 50 | Antenna rotated for 90° | |
| ML2 (2750 m distance from GS) | 1.4 | 25 | |
| 1.5 | 50 | ||
| 2.1 | 50 | Antenna rotated for 90° | |
| ML3 (4250 m distance from GS) | 0.275 | 100 | Bandwidth reduced from 8 to 4 MHz |
| ML4 (5400 m distance from GS) | 0.35 | 100 | Bandwidth reduced from 8 to 4 MHz |
| Measurement Location | Altitude (m) | Throughput (MBps) | Angle (°) |
|---|---|---|---|
| ML51 (1800 m distance from GS) | 30 | 1.45 | 0 |
| 50 | 1.5 | 0 | |
| 50 | 1.9 | 90 | |
| 90 | 1.9 | 0 | |
| 90 | 2.2 | 90 | |
| ML52 (2590 m distance from GS) | 30 | 1.65 | 0 |
| 30 | 2 | 90 | |
| 50 | 1.9 | 0 | |
| 50 | 2.1 | 90 | |
| 50 | 1.9 | −90 | |
| 90 | 1.9 | 0 | |
| 90 | 2.05 | 90 | |
| 90 | 1.9 | −90 | |
| ML53 (3850 m distance from GS) | 50 | 1.5 | 0 |
| 50 | 1.7 | 90 | |
| 50 | 1.8 | −90 | |
| 90 | 1.8 | 0 | |
| 90 | 2.15 | 90 | |
| 90 | 1.75 | −90 | |
| ML54 (4550 m distance from GS) | 50 | 0.75 | 0 |
| 50 | 0.4 | 90 | |
| 50 | 0.95 | −90 | |
| 90 | 1.3 | 0 | |
| 90 | 1.15 | 90 | |
| 90 | 1.4 | −90 | |
| ML55 (5300 m distance from GS) | 50 | 1.4 | 0 |
| 50 | 0.7 | 90 | |
| 50 | 1.1 | −90 | |
| 50 | 0.9 | 45 | |
| 50 | 1.2 | −45 | |
| 90 | 1.3 | 0 | |
| 90 | 1.4 | 90 | |
| 90 | 1.2 | −90 | |
| ML56 (6000 m distance from GS) | 140 | 1.3 | 0 |
| 140 | 0.8 | 90 | |
| 140 | 0.5 | −90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papić, V.; Šolić, P.; Milan, A.; Gotovac, S.; Polić, M. High-Resolution Image Transmission from UAV to Ground Station for Search and Rescue Missions Planning. Appl. Sci. 2021, 11, 2105. https://doi.org/10.3390/app11052105
Papić V, Šolić P, Milan A, Gotovac S, Polić M. High-Resolution Image Transmission from UAV to Ground Station for Search and Rescue Missions Planning. Applied Sciences. 2021; 11(5):2105. https://doi.org/10.3390/app11052105
Chicago/Turabian StylePapić, Vladan, Petar Šolić, Ante Milan, Sven Gotovac, and Miljenko Polić. 2021. "High-Resolution Image Transmission from UAV to Ground Station for Search and Rescue Missions Planning" Applied Sciences 11, no. 5: 2105. https://doi.org/10.3390/app11052105
APA StylePapić, V., Šolić, P., Milan, A., Gotovac, S., & Polić, M. (2021). High-Resolution Image Transmission from UAV to Ground Station for Search and Rescue Missions Planning. Applied Sciences, 11(5), 2105. https://doi.org/10.3390/app11052105